94
UPC PMSM Control (FOC & DTC) for WECS & Drives Dr. Antoni Arias. Universitat Politècnica de Catalunya. Catalonia. (Spain) 1/94

UPC
PMSM Control (FOC & DTC) for
WECS & Drives
Dr. Antoni Arias. Universitat Politècnica de Catalunya. Catalonia. (Spain)
1/94
UPC
• Introduction & motivation
• Permanent Magnet
Synchronous Machine
(PMSM)
– Dynamic equations
– Modeling
• Vector Control Strategies
– Field Oriented Control (FOC)
• Current & Speed Loops
• PI & IP controllers: root locus,
specifications, tuning and DSP
C code
Guidelines
–Direct Torque Control (DTC) • VSI review
• Flux & Torque Loops
• Hysteresis Comparators
• Space Vector Modulation
(SVM)
• Case study: Wind Turbine
• Experimental approach:
– Platforms
– Implementing issues
2/94

UPC
Introduction & Motivation
• An electric drive is an industrial system which performs the
conversion of electrical energy to mechanical energy (in
monitoring) or vice versa (in generator braking)
– Production plants, transportation, home appliances, pumps, air
compressors, computer disk drives, robots, etc…
Electric
Power
Source
Power
Electronic
Converter
ELECTRIC
MOTORLoad
Voltage
Sensors
Current
Sensors
Speed / Position
Sensors
or
Observers
Power Electronic Converter Control
Torque Control
Speed / Position Control DRIVE CONTROL
Power Source Performance Commands
Motion CommandsUser Interface
Regenerative
braking
3/94

UPC
Introduction & Motivation
Field Orientated Control (FOC) & Direct Torque Control (DTC) deserve special attention since both are high performance vector controllers.
• Electric drives involves many applications ranging from
below 1kW up to several dozens of MW.
High performance means:
(i) wide speed range,
(ii) fast and precise response
in speed or position.
4/94
UPC
• Electric machines drives absorb a large amount of the
electrical energy produced.
– 50% of the electrical energy is used in electric drives today (1).
– In the industrial countries, EM take around 65% of the entire electrical
energy available (2). (1) I. Boldea, S. A. Nasar. “Electric Drives”. CRC Press. Second Edition. 2006
(2) Kazmierkowski, M. P; Tunia, H. “Automatic Control of Converter-Fed Drives".
Elsevier. Studies in Electrical and Electronic Engineering 46. 1994.
• Electric Drives market by 2017: US$ 62.3 billion by 2017 (3). (3) Global Industry Analysts, Inc.
• Sensorless and High Performance Controls are still hot
research topics (4). (4) IEEE Xplore & Elsevier
Introduction & Motivation
5/94

UPC
AC60%
AC70%
AC75%
AC80%
DC40%
DC20%
DC25%
DC30%
1990 1995 2000 2005
• AC versus DC: (i) brushless (ii) higher torque density (iii)
lower initial and maintenance costs, (iv) power electronics
for AC and DC have comparable prices.
AC versus DC electric drives market evolution (1)
(1) I. Boldea, S. A. Nasar. “Electric Drives”. CRC Press. Second Edition. 2006
Introduction & Motivation
6/94

UPC
• DC
• AC
– Induction
– Switched Reluctance. Stepper. Hybrid.
– Permanent Magnet
• PMDC – Brushless
• PMSM: SMPMSM, IPMSM
• Linear
• Nano
• etc...
PMSMs are gaining market
becoming a key point for the
sustainable development
of the present century.
Introduction & Motivation
SRMs possess potential market.
Second machine most used in China ! http://green.autoblog.com/2011/06/28/need-rare-earth-
metals-switched-reluctance-motors-dont/
cla
ssific
ation
7/94

UPC
Permanent Magnet Machines
• Magnetic material to establish the rotor flux. – Neodymium-iron-boron (Nd2Fe14B) magnet is the strongest type of
rare-earth permanent magnet, which was developed in 1982 by GM.
• Advantages: – No rotor currents => no rotor losses => higher efficiency => energy
saving capability. Attractive for Wind applications.
– Smaller rotor diameters, higher power density and lower rotor inertia.
– Higher torque per ampere constant.
– Less weight and volume for the same power. Attractive for aerospace applications such as aircraft actuators.
– Other applications: machine tools, position servomotors (replacing the DC motors).
• Inconvenience: – Synchronous machines => need of rotor position. Sensorless control.
– Price.
– Permanent magnet is becoming a scarce raw material.
8/94
UPC
Permanent Magnet Machines
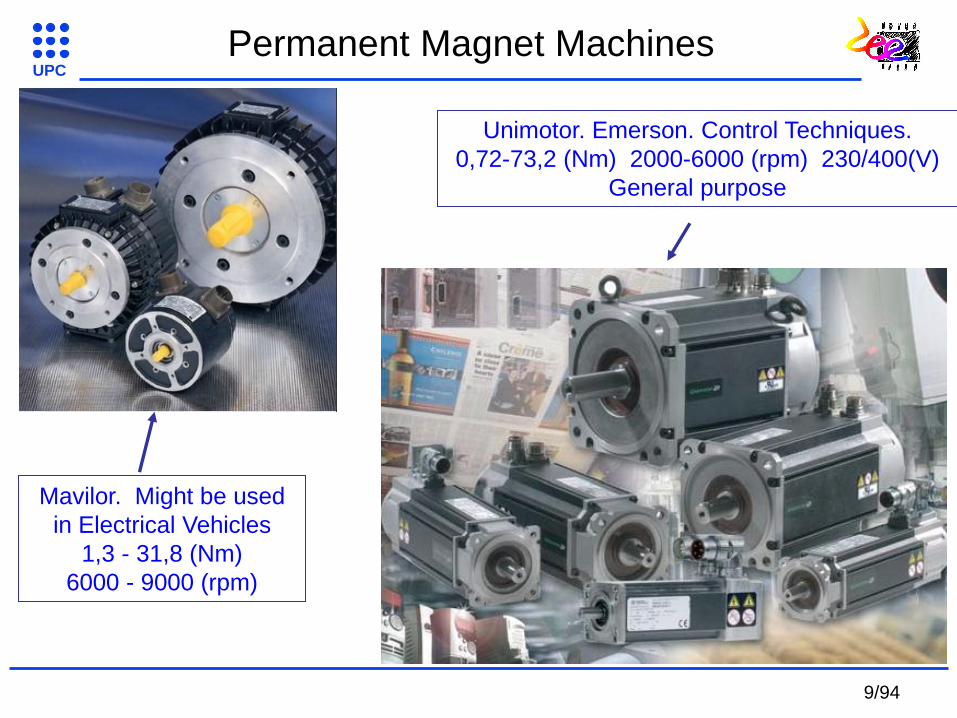
Mavilor. Might be used
in Electrical Vehicles
1,3 - 31,8 (Nm)
6000 - 9000 (rpm)
Unimotor. Emerson. Control Techniques.
0,72-73,2 (Nm) 2000-6000 (rpm) 230/400(V)
General purpose
9/94

UPC
Permanent Magnet Machines
PMSG 11kW
Multi-pole. External rotor
Wind turbine laboratory rig
(in collaboration with
Robotiker - Tecnalia)
4Q Motor Drive System
4kW DC – PMSM 1 kW
General purpose laboratory rig
10/94

UPC
• Considering the shape of the back EMF
• PMDC – brushless DC (BLDC) - trapezoidal
• PMAC – sinusoidal
Surface Mount Permanent Magnet
Synchronous Machine (SMPMSM)
Permanent Magnet Machines
Interior Mount Permanent Magnet
Synchronous Machine (IMPMSM)
11/94

UPC
PMSM Dynamic Equations
• Combines the individual phase quantities into a single vector in the complex plane
• Same transformation is applied to all other magnitudes such as voltages, fluxes, etc…
invariant power
invariantpower non
)()()(
32
32
3
4
3
2
c
etietiticij
c
j
ba
• Space vector transformation
12/94

UPC
PMSM Dynamic Equations
• Basic equation for phase windings voltages
• Total flux linkage
flux produced by the rotor magnet
Leakage inductance
Magnetising inductance
Self inductance
Mutual inductance
c
b
a
c
b
a
s
c
b
a
dt
d
i
i
i
R
v
v
v
)cos(
)cos(
)cos(
34
32
r
r
r
m
c
b
a
ccbca
bcbba
acaba
c
b
a
ψ
i
i
i
LMM
MLM
MML
ψ
ψ
ψ
mψ
lL
mL
mlcba LLLLL
2m
cabcab
LMMM baab MM; = cbbc MM; = acca MM; =
a
b
c
i
ib
ic
b
c
a
a
va +-
vc
+
-
-
+
vb
m
r
13/94

UPC
PMSM Dynamic Equations
• Voltage vector equation in the stationary - frame
)cos(
)cos(
2
3
2
r
r
mmlsdt
dψ
i
i
dt
dLL
i
iR
v
v
i
v +-
m
r
i
v
+
-
a
b
c
i
ib
ic
b
c
a
a
va +-
vc
+
-
-
+
vb
m
rClarke
transformation
invariant power
invariantpower non
º30cosº30cos
º60cosº60cos
32
32
c
xxcx
xxxcx
cb
cba
14/94

UPC
i
v +-
m
r
i
v
+
-
a
b
c
i
ib
ic
b
c
a
a
va +-
vc
+
-
-
+
vb
m
r
invariant power
invariantpower non;
2
3
2
30
2
1
2
11
32
32
c
x
x
x
cx
x
c
b
a
invariant power
invariantpower non1;
2
3
2
12
3
2
1
01
32
cx
xc
x
x
x
c
b
a
Clarke-1 Transformation
Clarke Transformation
• Non power invariant versus power invariant. See the comparison.
PMSM Dynamic Equations
15/94
UPC
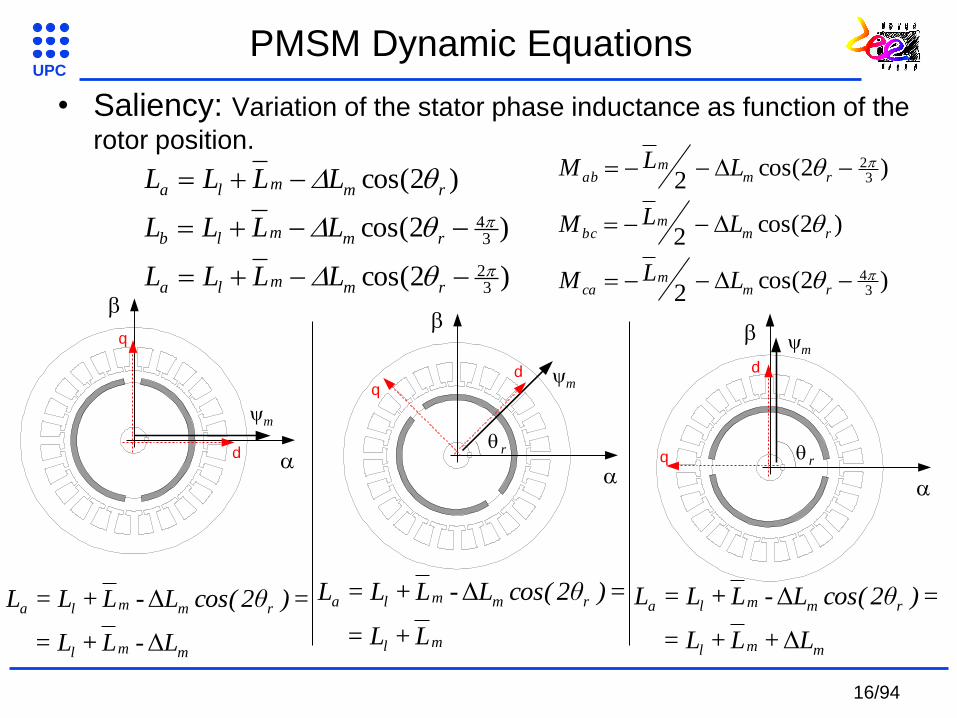
PMSM Dynamic Equations
• Saliency: Variation of the stator phase inductance as function of the
rotor position.
)2cos(
)2cos(
)2cos(
32
34
rmmla
rmmlb
rmmla
LLLL
LLLL
LLLL
)2cos(2
)2cos(2
)2cos(2
34
32
rmm
ca
rmm
bc
rmm
ab
LLM
LLM
LLM
m
d
q
mml
rmmla
LLL
)θ2cos(LLLL
Δ-+=
=Δ-+=
m
r
dq
ml
rmmla
LL
)θ2cos(LLLL
+=
=Δ-+=
m
r
d
q
mml
rmmla
LLL
)θ2cos(LLLL
Δ++=
=Δ-+=
16/94

UPC
PMSM Dynamic Equations
• voltage vector equation in the stationary - frame
considering saliency
• Where
• If there is no saliency and it is obtained the previous
equation.
)cos(
)cos(
)2cos()2sin(
)2sin()2cos(
2
r
r
m
rssrs
rsrss
s
dt
dψ
i
i
LLL
LLL
dt
d
i
iR
v
v
msmls LLLLL 2
3;
2
3
0mL
17/94

UPC
PMSM Dynamic Equations
• Voltage vector equation in the synchronous reference d/q
frame fixed to the rotor
• Angle chosen equal to the PM position
• Direct axis ( Ld = LS-ΔLS ) and quadrature ( Lq = LS+ΔLS ) axis
inductances
m
r
d
id
+
-v
d
vq
+
-
iq
q
Park
transformation
i
v +-
m
r
i
v
+
-
1
0rm
q
d
qrd
rqd
q
d
s
q
dψ
i
i
dtdLL
LdtdL
i
iR
v
v
18/94

UPC
i
v +-
m
r
i
v
+
-
x
x
x
x
q
d
cossin
sincos
m
r
d
id
+
-v
d
vq
+
-
iq
q
q
d
x
x
x
x
cossin
sincos
PMSM Dynamic Equations
Park Transformation
Park-1 Transformation
19/94

UPC
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Time [ s ]
[ A
]
ialpha
ibeta
ib
ic
iq
id
• Non power invariant
• Different constant values. (c=2/3) for Clark & (c=1) for Clarke-1.
• Same amplitudes for (a,b,c) & (α,β) & (d,q).
PMSM Dynamic Equations
20/94
UPC
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Time [ s ]
[ A
]
ialpha
ibeta
ib
ic
iq
id
ia
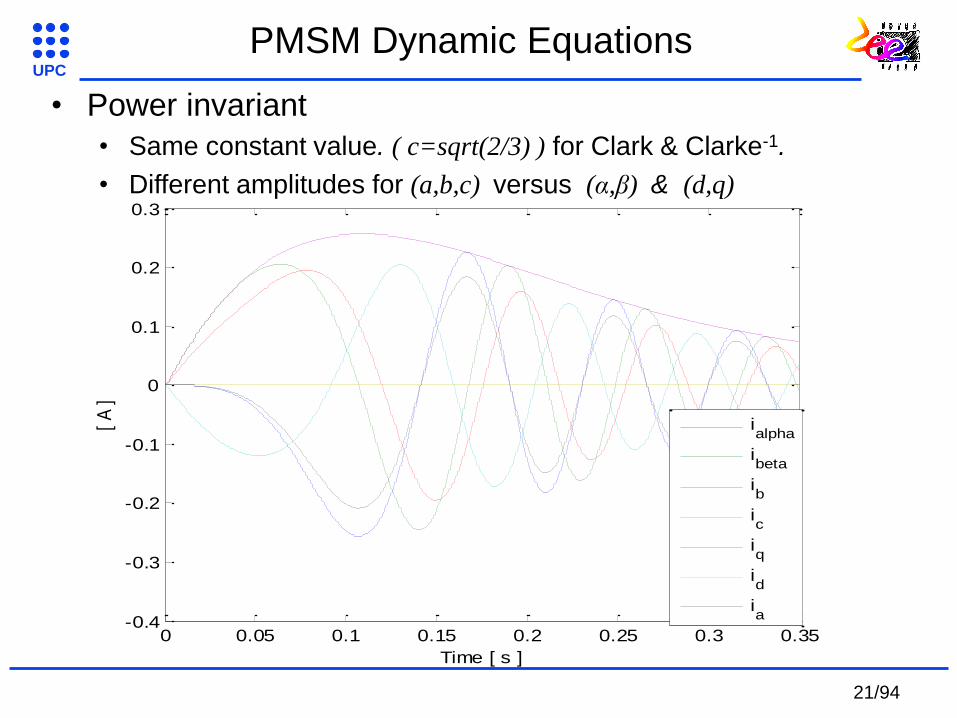
• Power invariant
• Same constant value. ( c=sqrt(2/3) ) for Clark & Clarke-1.
• Different amplitudes for (a,b,c) versus (α,β) & (d,q)
PMSM Dynamic Equations
21/94

UPC
c
b
a
q
d
x
x
x
cx
x
2
3
2
30
2
1
2
11
cossin
sincos
invariant power
invariantpower non;
32sin
32sinsin
32cos
32coscos
32
32
cwhere
x
x
x
cx
x
c
b
a
q
d
• Direct (Clarke & Park) transformation
PMSM Dynamic Equations
22/94

UPC
q
d
c
b
a
x
xc
x
x
x
cossin
sincos
23
2
1
23
2
1
01
invariant power
invariantpower non1;
32sin
32cos
32sin
32cos
sincos
32
cwhere
x
xc
x
x
x
q
d
c
b
a
• Direct (Clarke & Park) Inverse transformation
PMSM Dynamic Equations
23/94
UPC
PMSM Dynamic Equations
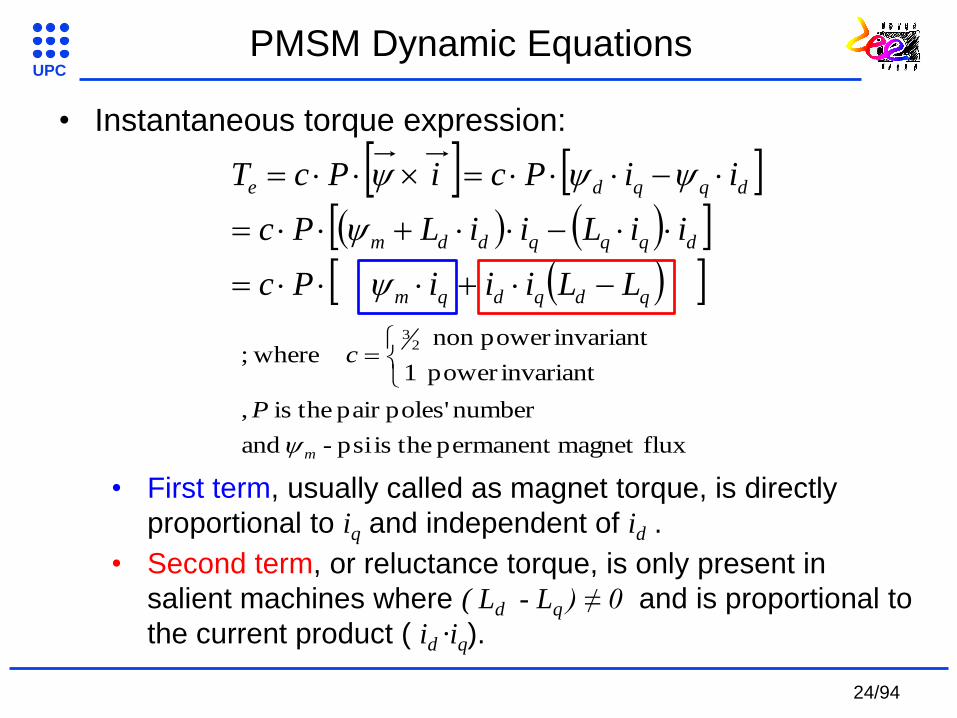
• Instantaneous torque expression:
qdqdqm
dqqqddm
dqqde
LLiiiPc
iiLiiLPc
iiPciPcT
fluxmagnet permanent theis psi - and
number poles'pair theis ,
invariant power 1
invariantpower non where;
23
m
P
c
• First term, usually called as magnet torque, is directly
proportional to iq and independent of id .
• Second term, or reluctance torque, is only present in
salient machines where ( Ld - Lq ) ≠ 0 and is proportional to
the current product ( id ·iq).
24/94

UPC
function transfer;
equation ldiferentia ;
DJs
TTw
TTwDdt
dwJ
Lem
Lemm
• Motion equation
• Drive Inertia ( J )
• Damping constant due to Friction ( D or F )
• Load Torque ( TL )
PMSM Dynamic Equations
25/94

UPC
Exercise: Sketch a complete PMSM scheme model
• Use the d/q model equations
• Find out all the required equations involved
• Determine where the Clarke (a,b,c) to (α,β) & Park (α,β) to (d,q)
transformations should be applied to get a more realistic model
PMSM Modeling
26/94

UPC
PMSM Modeling
27/94

UPC
PMSM Modeling
•The adopted parameters for the model are as follows:
Lq=0.009165; Ld=0.006774; R=1.85; psi=0.1461; P=3.
(specific motor data is on the next page)
•For the motion equation of the whole drive it can be used:
J=0.77e-3; F=1e-3.
28/94

UPC
unimotor fm
Emerson Control Techniques
Model: 115E2A300BACAA115190
Number of poles: 6
Rated speed: 3000 (rpm)
Rated torque: 3.0 (Nm)
Rated power 0.94 (kW)
KT: 0.93 (Nm/Arms)
KE: 57.0 (Vrms/krpm)
Inertia: 4.4 (kgcm²)
R (ph-ph): 3.7 (Ohms)
L (ph-ph): 15.94 (mH)
Continuous stall: 3.5 (Nm)
Peak: 10.5 (Nm)
PMSM Modeling
• Ld and Lq values?
• ΔLs can be obtained measuring the
inductance for different rotor positions.
• The first order system, composed by
an L and R, can be identified by
supplying a step voltage in the d and q
components.
How to obtain the parameters
from a commercial catalogue?
ssdssq
dqdq
s
LLLLLL
LLLs
LLL
;
2;
2
29/94
UPC
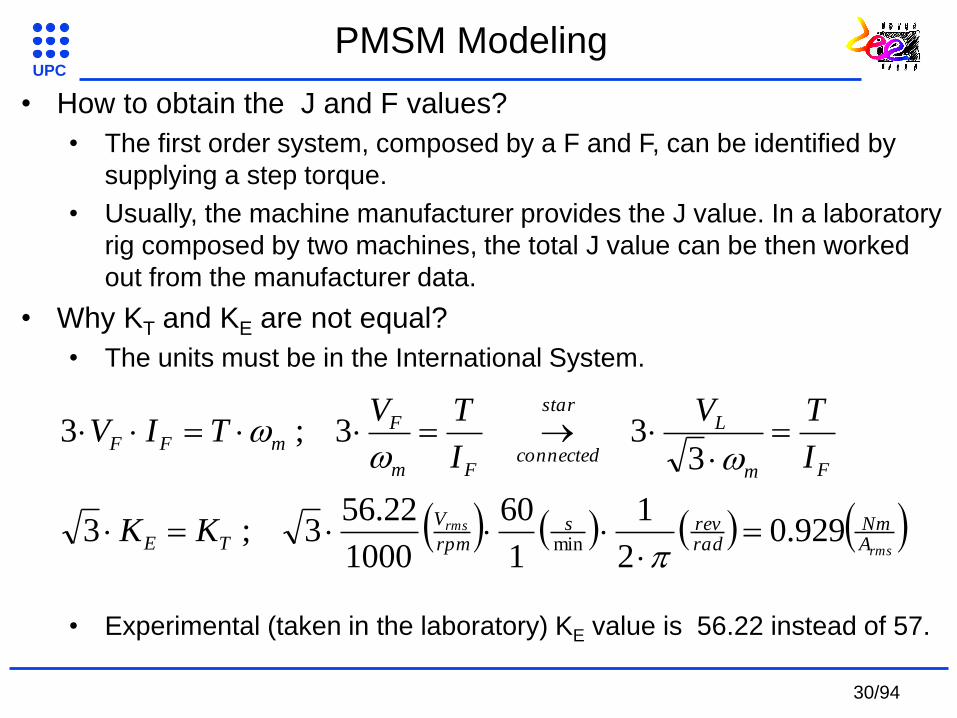
• How to obtain the J and F values?
• The first order system, composed by a F and F, can be identified by
supplying a step torque.
• Usually, the machine manufacturer provides the J value. In a laboratory
rig composed by two machines, the total J value can be then worked
out from the manufacturer data.
• Why KT and KE are not equal?
• The units must be in the International System.
• Experimental (taken in the laboratory) KE value is 56.22 instead of 57.
rms
rms
ANm
radrevs
rpm
V
TE
Fm
Lstar
connectedFm
FmFF
KK
I
TV
I
TVTIV
929.02
1
1
60
1000
22.563;3
333;3
min
PMSM Modeling
30/94

UPC
•How to obtain the value?
From the torque expression, and the KT (Nm/Arms)
parameter, it can be deduced the following expression:
Finally, the numerical value will be:
And the factor is used to convert the rms to the maximum value.
qme iPcT
Pc
KPcK
i
T TmmT
q
e
WbPc
KTm 1461.0
32
3
93.02
1
m
21
PMSM Modeling
31/94

UPC
Types of Controllers
32/94

UPC
Field Oriented Control (FOC) for PMSM
• Instantaneous torque for the PM synchronous machine
m
r
dq
Iq>0
m
r
dq
Iq<0
Te > 0 Te < 0
)( 2
3qdqdqme LLiiiψPT
• If id = 0, for not demagnetizing the PMSM, the reluctance torque is 0.
• Therefore, the electromagnetic torque will be regulated with iq .
• Duality with the DC Machine control.
qm iψP 2
3
id = 0
33/94

UPC
m
Te
m
r
dq
iq<0
m
r
dq
iq>0
m
m
m
r
dq
iq<0
m
m
r
dq
iq>0
m
FOC in PMSM
Four quadrant Motor (Q1 & Q3) Generator (Q2 & Q4) 34/94
UPC
FOC Scheme
SVM
4 step
Matrix
Converter
Grid
LC filter
UsAUsB
UsC
V
V
PMSM
32d q
iq* +
PI
PI
+id*
-
-d q
PWM m* +
PI-
m
d/dt
Pe
ia
ib
ic
UA UB UC
Kt -1
Speed
Current
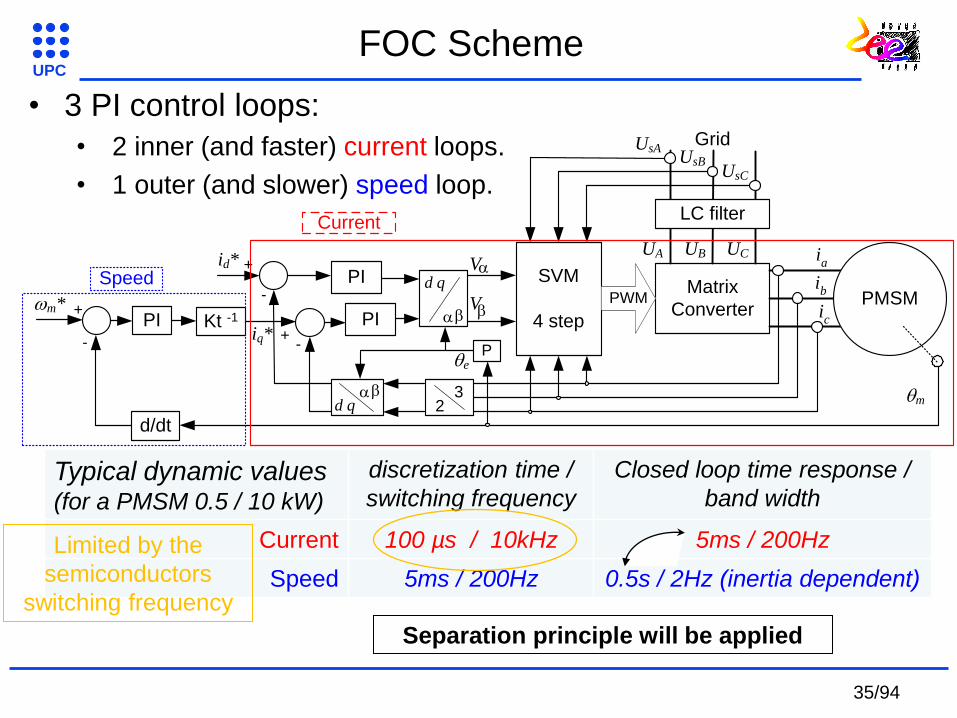
Typical dynamic values (for a PMSM 0.5 / 10 kW)
discretization time /
switching frequency
Closed loop time response /
band width
Current 100 µs / 10kHz 5ms / 200Hz
Speed 5ms / 200Hz 0.5s / 2Hz (inertia dependent)
• 3 PI control loops:
• 2 inner (and faster) current loops.
• 1 outer (and slower) speed loop.
Limited by the
semiconductors
switching frequency
Separation principle will be applied
35/94

UPC
Current Controller
• The current loop, for controlling design purposes, can be modeled as
a first order system.
s
s
s
RL
sRL
R
v
i
;1
1
1
0em
q
d
qed
eqd
q
d
s
q
dψ
i
i
sLL
LsL
i
iR
v
v
vd
+
Lq·we·iq
id
1
1
sRL
R
sd
svd id
1
1
sRL
R
sd
s
vq
-
iq
1
1
sRL
R
sq
s
( Ld·id +PM )·we
vq iq
1
1
sRL
R
sq
s
• The coupling terms are eliminated, since they are considered as a
perturbation.
36/94

UPC
• The current loop can be modeled as a first order system, whose
transfer function in Laplace domain is:
)(99.01)(;5
)(98.01)(;4
)(95.01)(;3
)(632.01)(;
)()1(1)(
tvRtit
tvRtit
tvRtit
tvRtit
tveRti
s
s
s
s
t
s
4
1)(
1
)(
)(
sRL
R
sV
sI
s
s
• Its open loop step time
response is:
Current Controller
37/94

UPC
0 0.005 0.01 0.015 0.02 0.025 0.030
0.1
0.2
0.3
0.4
0.5
0.6
0.7
System: g
Time (seconds): 0.0172
Amplitude: 0.531
System: g
Time (seconds): 0.0298
Amplitude: 0.54
Step Response
Time (seconds)
Am
plit
ud
e
• Considering the motor
parameters given before:
• Time constant:
• Time response at 98%
• Final value:
)(23.174 ms
185.110·97.7
85.11
)(
)(3
ssV
sI
)(31.485.1
10·97.7 3
ms
54.085.1
1
Current Controller
38/94
UPC
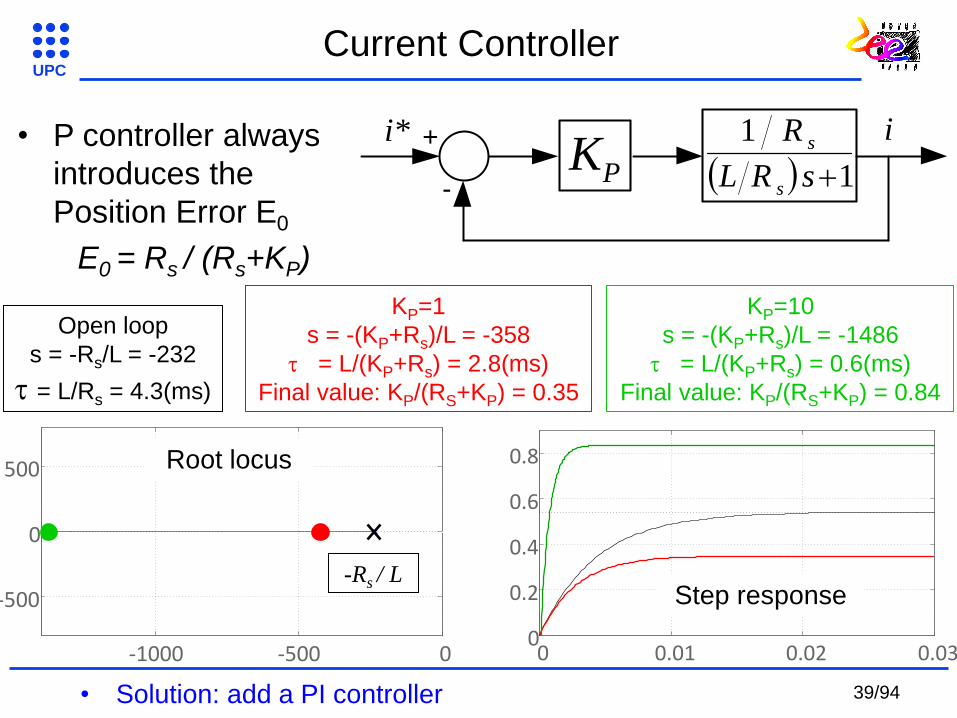
0 0.01 0.02 0.030
0.2
0.4
0.6
0.8
-1000 -500 0
-500
0
500
Open loop
s = -Rs/L = -232
= L/Rs = 4.3(ms)
KP=1
s = -(KP+Rs)/L = -358
= L/(KP+Rs) = 2.8(ms)
Final value: KP/(RS+KP) = 0.35
KP=10
s = -(KP+Rs)/L = -1486
= L/(KP+Rs) = 0.6(ms)
Final value: KP/(RS+KP) = 0.84
Root locus
Step response
+
-
i* i
1
1
sRL
R
s
s
PK• P controller always
introduces the
Position Error E0
E0 = Rs / (Rs+KP)
-Rs / L
• Solution: add a PI controller
Current Controller
39/94
UPC
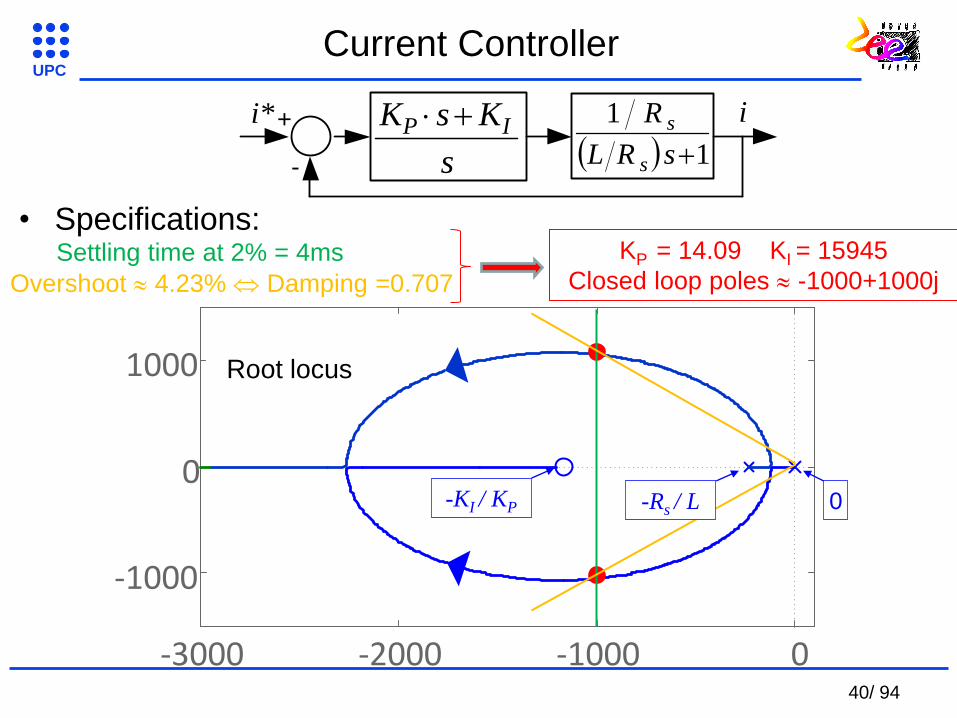
-3000 -2000 -1000 0
-1000
0
1000
KP = 14.09 KI = 15945
Closed loop poles -1000+1000j
• Specifications: Settling time at 2% = 4ms
Overshoot 4.23% Damping =0.707
Root locus
-Rs / L 0 -KI / KP
+
-
i* i
1
1
sRL
R
s
s
s
KsK IP
Current Controller
40/ 94
UPC
Time (seconds)
0 1 2 3 4 5
x 10-3
0
0.5
1
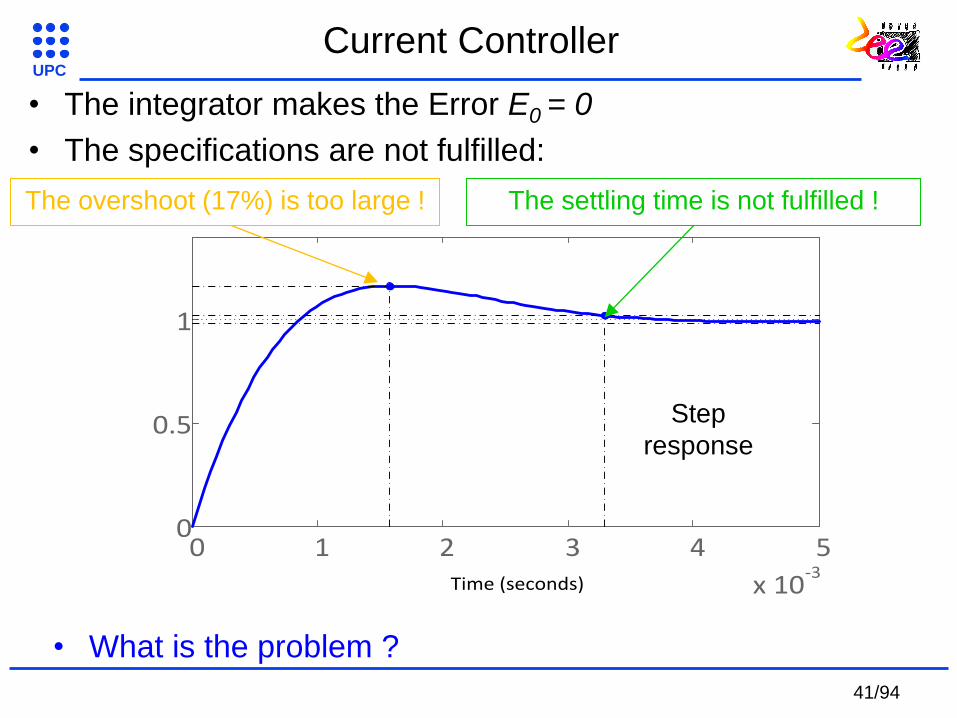
Step
response
The overshoot (17%) is too large !
The settling time is not fulfilled !
• The integrator makes the Error E0 = 0
• The specifications are not fulfilled:
• What is the problem ?
Current Controller
41/94

UPC
L
K
L
K
L
Rss
sK
K
L
K
i
i
IPs
I
PI
2
1
*
22
2
2 nn
n
ss
• What is the closed loop transfer function?
• Is it a pure 2nd
order term? NO! There is an
unwanted zero !
A pre filter is used
to cancel the zero +
-
i
1
1
sRL
R
s
s
s
KsK IP i*PFi*
1
1
sKK IP
L
K
L
K
L
Rss
sK
K
L
K
sK
Ki
i
IPs
I
PI
I
P
2
1
1
1
*
L
K
L
K
L
Rss
L
K
i
i
IPs
I
2*
Current Controller
42/94

UPC
0 1 2 3 4 5 6 7
x 10-3
0
0.5
1
Time (s)
L
K
L
K
L
Rss
L
K
L
K
L
K
L
Rss
L
K
sK
K
L
K
L
K
L
Rss
sK
K
L
K
i
i
IPs
I
IPs
I
I
P
IPs
I
PI
222
1
*
+
-
i* i
1
1
sRL
R
s
s
s
KsK IP i*PFi*
1
1
sKK IP+ -
i
1
1
sRL
R
s
s
s
KsK IP
zero
PI
PF+PI
Current Controller
43/94
UPC
+
-
i* i
1
1
sRL
R
s
s
s
K I +
-
PK
+
-
i* i
s
K I
1
1
sKR
L
KR
Ps
Ps
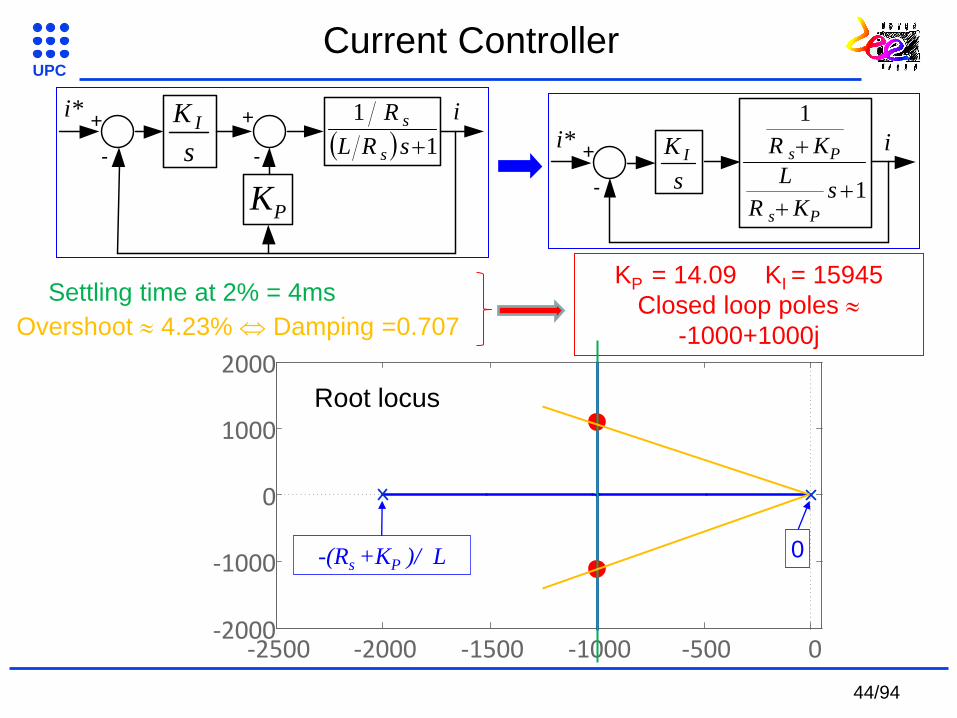
-2500 -2000 -1500 -1000 -500 0-2000
-1000
0
1000
2000
Root locus
-(Rs +KP )/ L 0
KP = 14.09 KI = 15945
Closed loop poles
-1000+1000j
Settling time at 2% = 4ms
Overshoot 4.23% Damping =0.707
Current Controller
44/94

UPC
Current Controller
Fixing the settling time at 2% (Ts2%) and the damping factor (ζ)
the KP and KI can be calculated
n
Ts
4
%2
22
2
2 nn
n
ss
L
K
L
K
L
Rss
L
K
i
i
IPs
I
2*
L
KR Psn
2
snP RLK 2
sP RTs
LK
%2
8
L
K In 2
2nI LK
2%2
2
16
Ts
LK I
2nd order TF
Current loop TF with PI or IP
Identifying coefficients
4.22 instead of 4 when ζ = 0.707
45/94
UPC
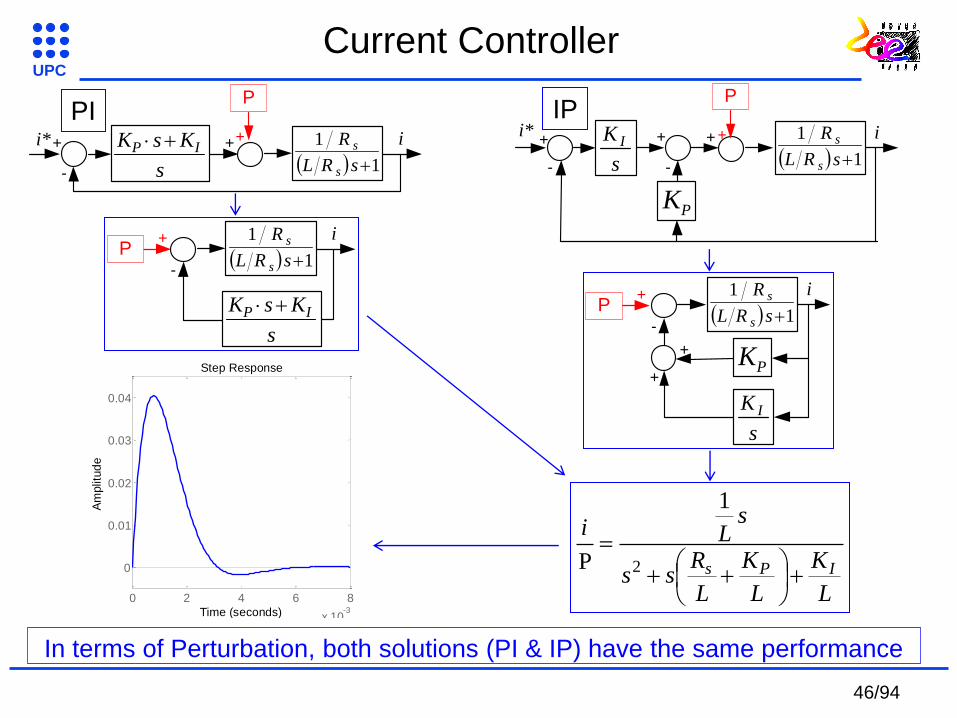
+
-
i* i
1
1
sRL
R
s
s
s
K I +
-
PK
+
P
+
P
++
-
i* i
1
1
sRL
R
s
s
s
KsK IP +
-
i
1
1
sRL
R
s
s
s
KsK IP
+P
i
1
1
sRL
R
s
s
s
K I
+
+PK
+P
-
L
K
L
K
L
Rss
sLi
IPs
2
1
P
0 2 4 6 8
x 10-3
0
0.01
0.02
0.03
0.04
Step Response
Time (seconds)
Am
plit
ud
e
PI IP
In terms of Perturbation, both solutions (PI & IP) have the same performance
Current Controller
46/94

UPC
PI+ -
id*PF + vd*id*
+
Lq·we·iq
PMSMControl
id
1
1
sRL
R
sd
s
1
1
sKK IP
• Decoupling terms have to be added:
iq*+
-
IP+ vq*
-
iq
1
1
sRL
R
sq
s
( Ld·id +PM )·we
PMSMControl
• Current loop with PI + PF (d axis) and IP (q axis)
-
Lq·we·iq
Ld·we·id +PM·we
+
Current Controller
47/94

UPC
• Implementing PI in a DSP
– From S to Z domain
– Ts=100us
Step Response
Time (sec)
Am
plitu
de
0 1 2 3 4 5 6 7 8
x 10-3
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1-z
)Ts-1(-zK)z(PI
s
sK)s(PI
P
I
P
IK
K
P
KK
P=→
+=
1-z
,920-z5,5)z(PI
s
800s5,5)s(PI =→
+=
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Root Locus Editor (C)
Real Axis
Imag A
xis
0.84 0.86 0.88 0.9 0.92 0.94 0.96 0.98 1-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Root Locus Editor (C)
Real Axis
Ima
g A
xis
Current Controller
48/ 94
UPC
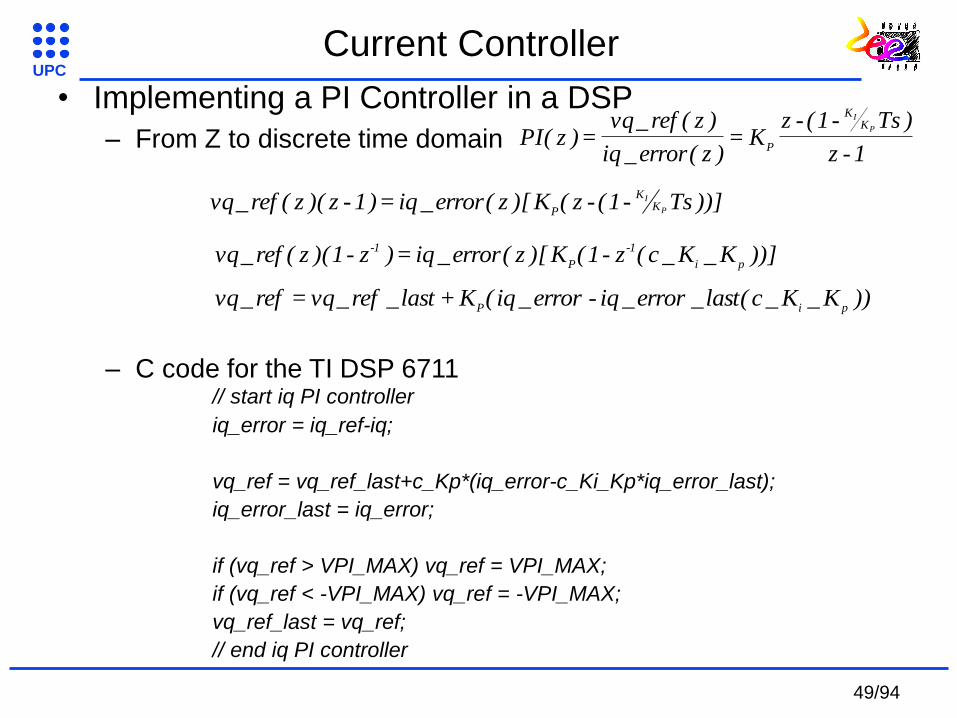
// start iq PI controller
iq_error = iq_ref-iq;
vq_ref = vq_ref_last+c_Kp*(iq_error-c_Ki_Kp*iq_error_last);
iq_error_last = iq_error;
if (vq_ref > VPI_MAX) vq_ref = VPI_MAX;
if (vq_ref < -VPI_MAX) vq_ref = -VPI_MAX;
vq_ref_last = vq_ref;
// end iq PI controller
• Implementing a PI Controller in a DSP
– From Z to discrete time domain
– C code for the TI DSP 6711
1-z
)Ts-1(-zK
)z(error_iq
)z(ref_vq)z(PI
P
IK
K
P==
))]Ts-1(-z(K)[z(error_iq)1-z)(z(ref_vqP
IK
K
P=
))]K_K_c(z-1(K)[z(error_iq)z-1)(z(ref_vqpi
-1
P
-1 =
))K_K_c(last_error_iq-error_iq(Klast_ref_vqref_vqpiP
+=
Current Controller
49/94
UPC
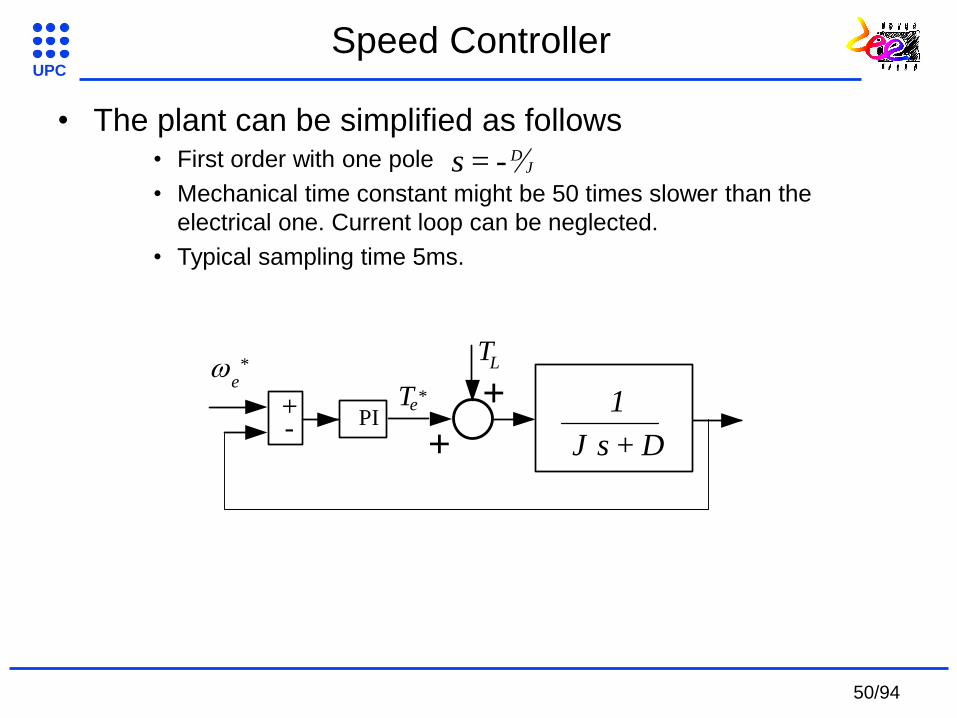
• The plant can be simplified as follows • First order with one pole
• Mechanical time constant might be 50 times slower than the
electrical one. Current loop can be neglected.
• Typical sampling time 5ms.
JD-s =
+- PI
Te*
DsJ
1
+
e*
+
+
TL
Speed Controller
50/94
UPC
Kp
In Out
++
s
1
e_ref
e_int
+e_sat
-e_sat
Saturation
Kt
Adapt TàI
e_oute_pro eo
Ki
0
10<>
e_dif
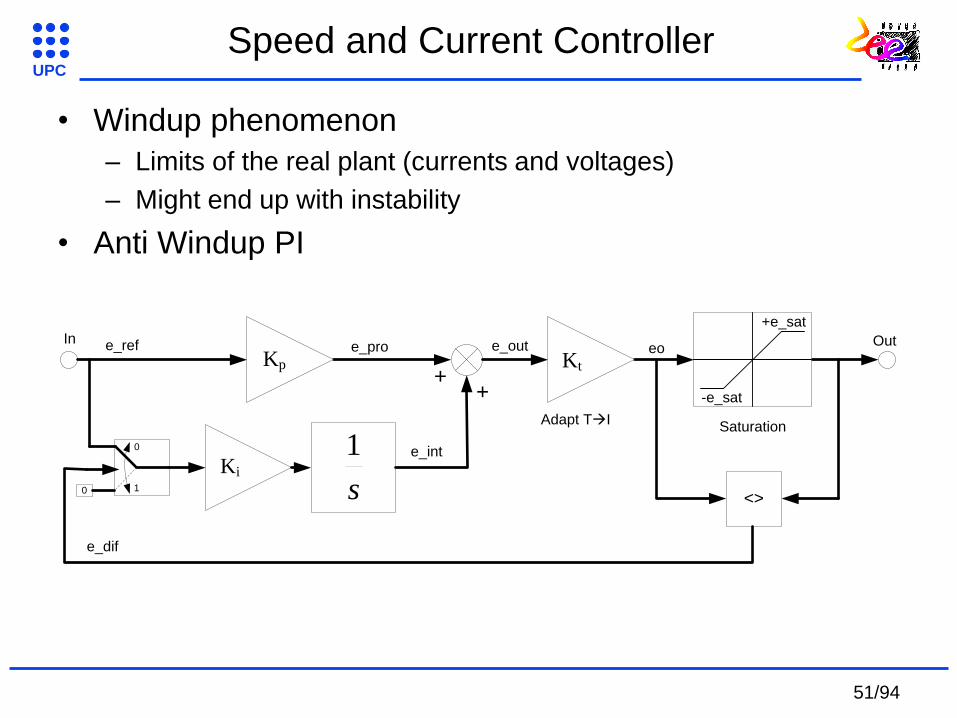
• Windup phenomenon
– Limits of the real plant (currents and voltages)
– Might end up with instability
• Anti Windup PI
Speed and Current Controller
51/94

UPC
Exercise
• Sketch a complete FOC scheme for a PMSM. It has to
include:
Speed and currents control loops
(PI + pre filter) or IP
Saturations (software protections)
Anti Windup
Feed forward (decoupling) terms
• Draw the magnitudes (speed reference, speed response, iq
reference and iq response) waveforms for the cases: (i)
electrical car & (ii) lift. Indicate, in the drawn waveforms,
the motoring or generating operating modes.
• Propose a programming code (any generic language) to
implement a PI.
52/94

UPC
• SISO tool. Matlab
• Matlab/Simulink PMSM FOC. Waveforms.
• FOC in a DSP
53/94

UPC
• Direct Torque Control (DTC) was firstly introduced by Takahashi in 1986
[Ref 1]. It was an important new method becoming very popular.
• Depenbrock in 1988 [Ref 2] introduced a similar idea under the name
Direct Self Control.
• However, just ABB company has got a popular commercial drive based
on DTC, the ASC600.
– Great number of applications such as: pumps, conveyors, lifts…from 2.2kW
until 630kW.
– Thanks to its 40MHz Toshiba processor plus ASIC, ASC600/800 closes the
entire control loop every 25us.
Takahashi, I and Nogushi, T. “A New Quick-Response and High-Efficiency Control Strategy of
an Induction Motor”, IEEE Trans. Industry Appl., Vol. 1A-22, pages 820-827, October 1986.
Depenbrock, M. "Direct Self Control of Inverter-Fed Induction Machines". IEEE Trans. on Power
Electronics. vol: PE-3, no:4 October 1988. pp: 420-429.
Direct Torque Control
54/94

UPC
Classical DTC schematic
Features
– Direct torque and stator flux control
– Indirect control of stator currents and
voltages
– Sinusoidal stator fluxes and currents
Table
Torque
ref
Flux ref +
-
+
-VSI
stator flux
torque
estimators
flux sector wm
DT
inductionmotor
Advantages
– Fastest torque response.
– Absence of co-ordinate transform.
– Absence of voltage modulator block
– Absence of PI controllers for flux and torque.
– Robustness against parameters variation.
55/94
UPC
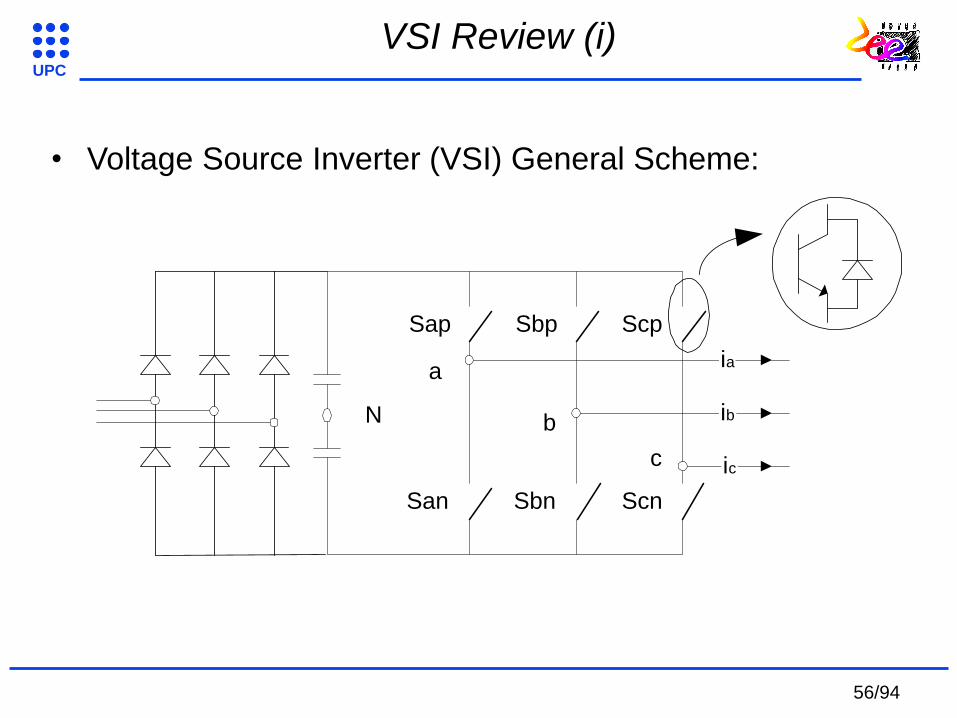
• Voltage Source Inverter (VSI) General Scheme:
N
San
Sap
Sbn
Sbp Scp
Scn
ia
ic
ib
a
b
c
VSI Review (i)
56/94

UPC
+Va+Vc
+Vb -Vb E1
a b c
E2
a b c
+Vb
-Vc
3
4
3
2
)()()(3
2
j
c
j
ba etvetvtvv
• Vector representation using the space vector transformation:
VSI Review (ii)
Questions:
(i) How many vectors?
(ii) Deduce the other
vectors.
57/94
UPC
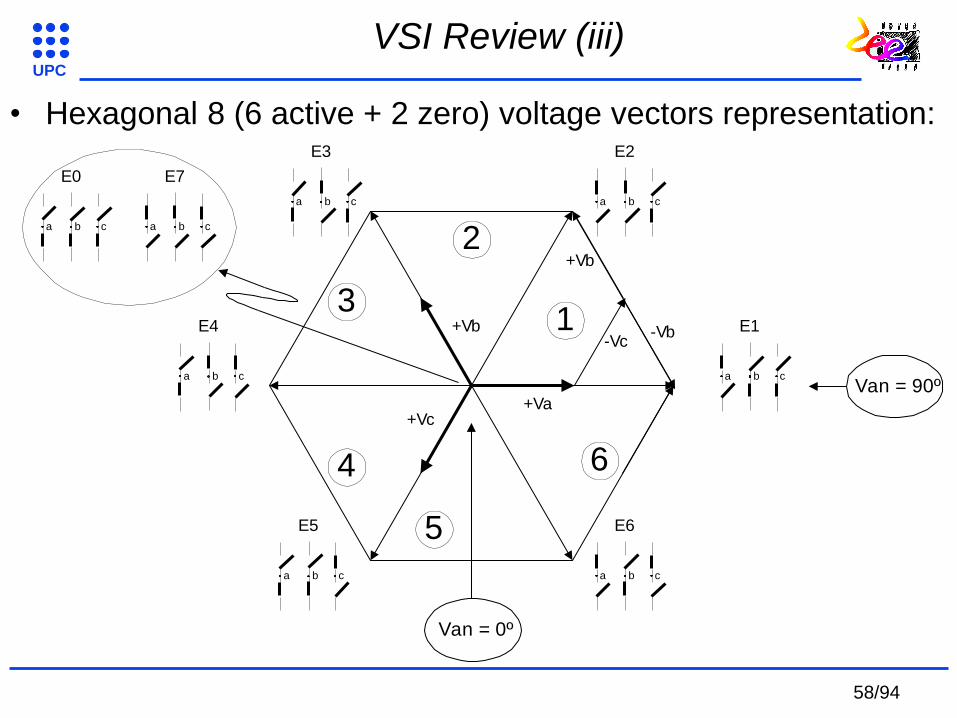
• Hexagonal 8 (6 active + 2 zero) voltage vectors representation:
VSI Review (iii)
+Va+Vc
+Vb -Vb E1
a b c
E2
a b c
+Vb
-Vc
E3
a b c
E4
a b c
E6
a b c
E5
a b c
1
5
4
3
2
6
E7
a b c
E0
a b c
Van = 0º
Van = 90º
58/94

UPC
Tangential component - torque Normal component - modulus flux
v1(100)
v4(011)
v3(010) v2(110)
v5(001) v6(101)
v3(FD,TI)
v2 (FI,TI)
1
65
4
32
v6(FI,TD)v5(FD,TD)
tg
n
DTC Principles
rss
'
r2mrs
me sin
LLL
LP
2
3t
S1
TI V2
T= V0FI
TD V6
TI V3
T= V7FD
TD V5
tu ss
59/94
UPC
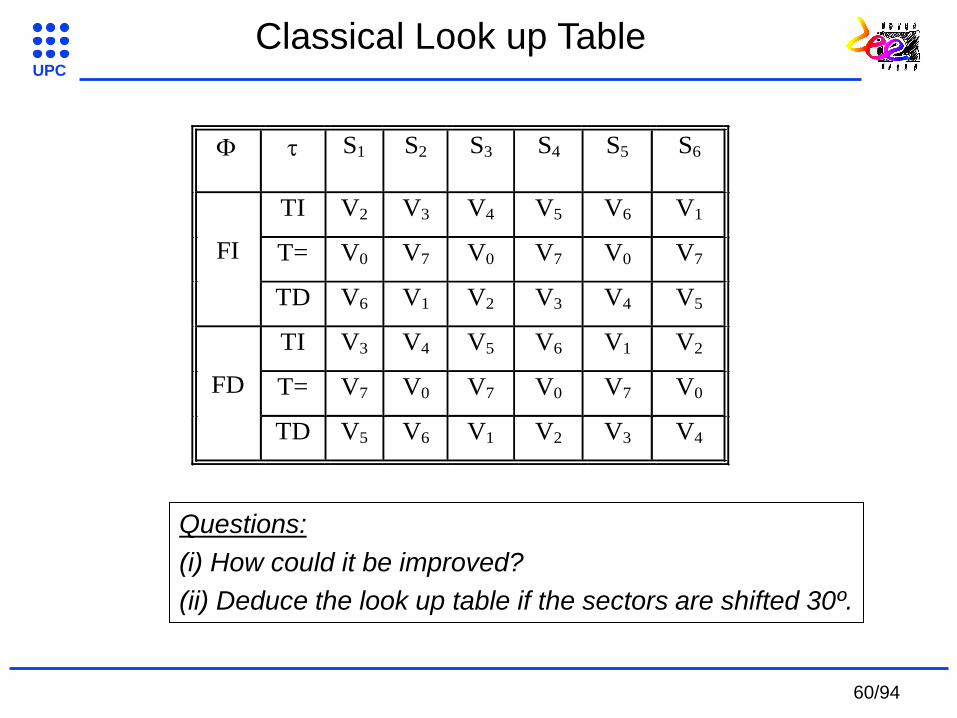
Classical Look up Table
S1 S2 S3 S4 S5 S6
TI V2 V3 V4 V5 V6 V1
T= V0 V7 V0 V7 V0 V7FI
TD V6 V1 V2 V3 V4 V5
TI V3 V4 V5 V6 V1 V2
T= V7 V0 V7 V0 V7 V0FD
TD V5 V6 V1 V2 V3 V4
Questions:
(i) How could it be improved?
(ii) Deduce the look up table if the sectors are shifted 30º.
60/94

UPC
Te* - hst
Te*
t1 t2 t3
S / H
1/TzTe* + hst
Te*
Tz Tz Tz
• The discrete or digital implementation of the hysteresis is possible only for huge
sampling frequency.
• Variable switching frequency.
Te*
Tz classic DTC
2_states
modulation
3_states
modulation
Tz
V1 V7V2
V7V2
V2V1
V2
V0 V2 V2V7V1 V1
THESIS
SVM
V0
V0
Classical DTC disadvantages
• Inherent torque and flux ripples. Non of the VSI states is able to generate the exact
voltage value required for make zero both the torque error and the stator flux error.
61/94
UPC
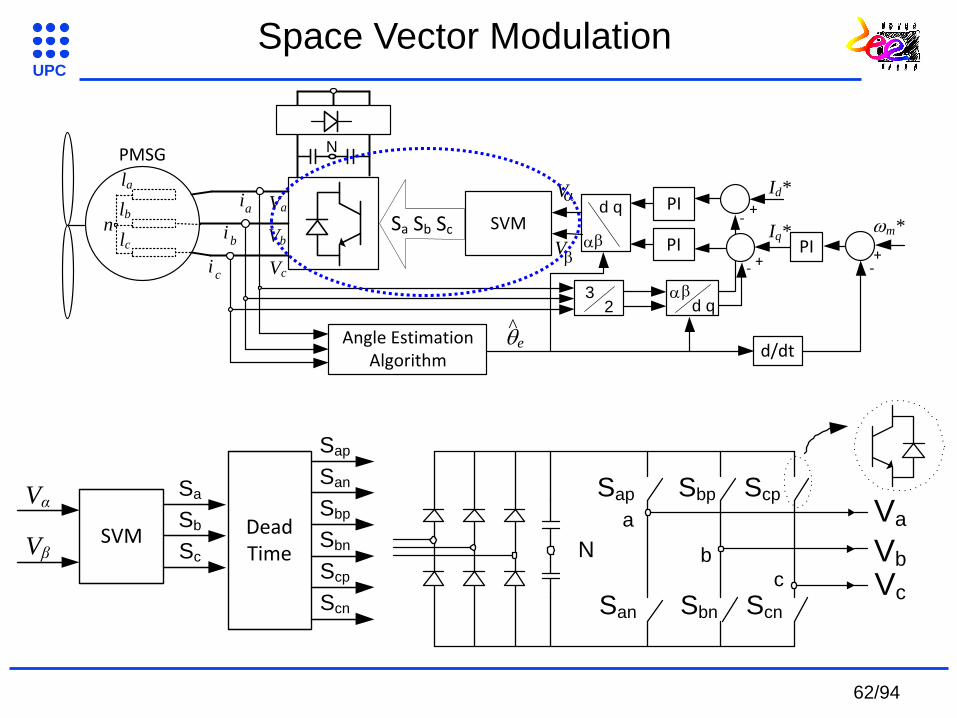
SVM
Vα
Vβ
Sa
Sb
Sc
Dead Time
Sap
San
Sbp
Sbn
Scp
Scn
N
Sap Sbp Scp
a
b
c
Va
Vb
VcSan Sbn Scn
SVM
V
V
PMSG
32 d q
Iq*
+
PI
PI
+
Id*
-
-d q
Angle EstimationAlgorithm
Sa Sb Sc m*
+PI-
e^
d/dt
ia
ib
ic
la
lb
lc
n
Va
Vb
Vc
N
Space Vector Modulation
62/94
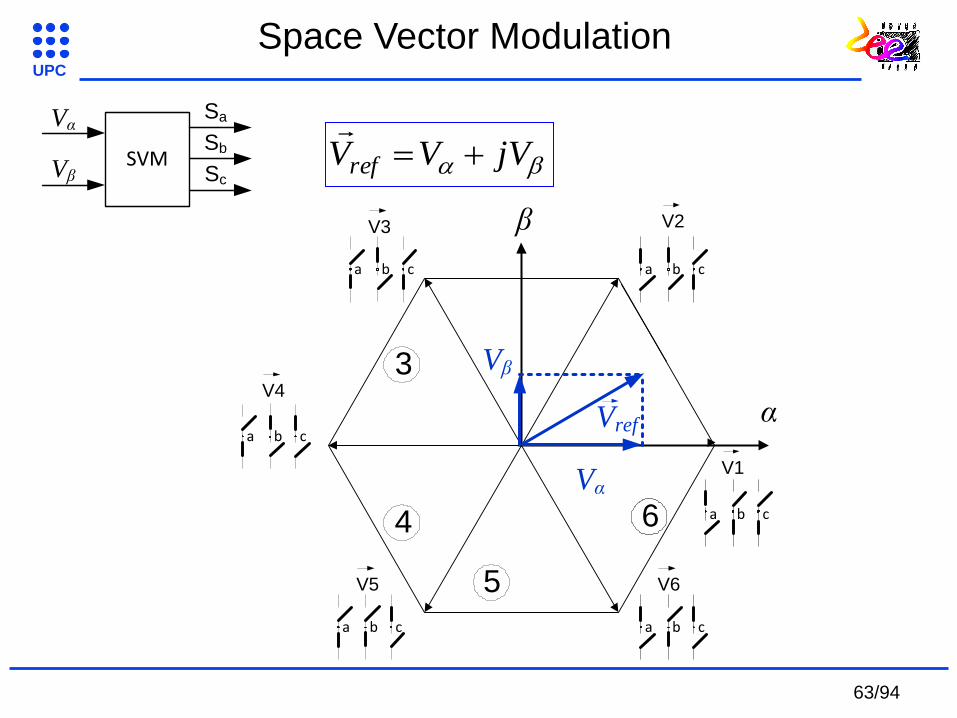
UPC
SVM
Vα
Vβ
Sa
Sb
Sc
a b c
V2
a b ca b c
a b c
a b ca b c
5
4
3
6
β
α
V1
V3
V4
V5 V6
Vα
Vβ
Vref
jVVVref
Space Vector Modulation
63/94

UPC
Vref
d1·V1
d2·V2
2211 VdVdVref
PWMPWM T
Td
T
Td 2
21
1 ;
07
2107
322
321
º60sin
sin
º60sin
º60sin
TT
TTTTT
V
VTT
V
VTT
PWM
dc
ref
PWM
dc
ref
PWM
θ
sinº60sin
º60sinº60sin
22
11
ref
ref
VdV
VdV
a b c
V2
a b c
V1
Space Vector Modulation
64/94

UPC
Space Vector Modulation
Sa
Sb
Sc
Dead Time
Sap
San
Sbp
Sbn
Scp
Scn
• Ton < Toff The DC bus can be short circuited.
0
1Sa
off
onSap
off
on
San
N
Sap
a
San
0
1Sa
off
onSap
off
on
San
• Turn on transitions
have to be delayed.
dead time• Dead time appears.
65/94
UPC
Space Vector Modulation
LA
+
-
eA(t)
n
ia
icib
N
San
Sap
Sbn
Sbp Scp
Scn
ia
ic
ib
a
b
c
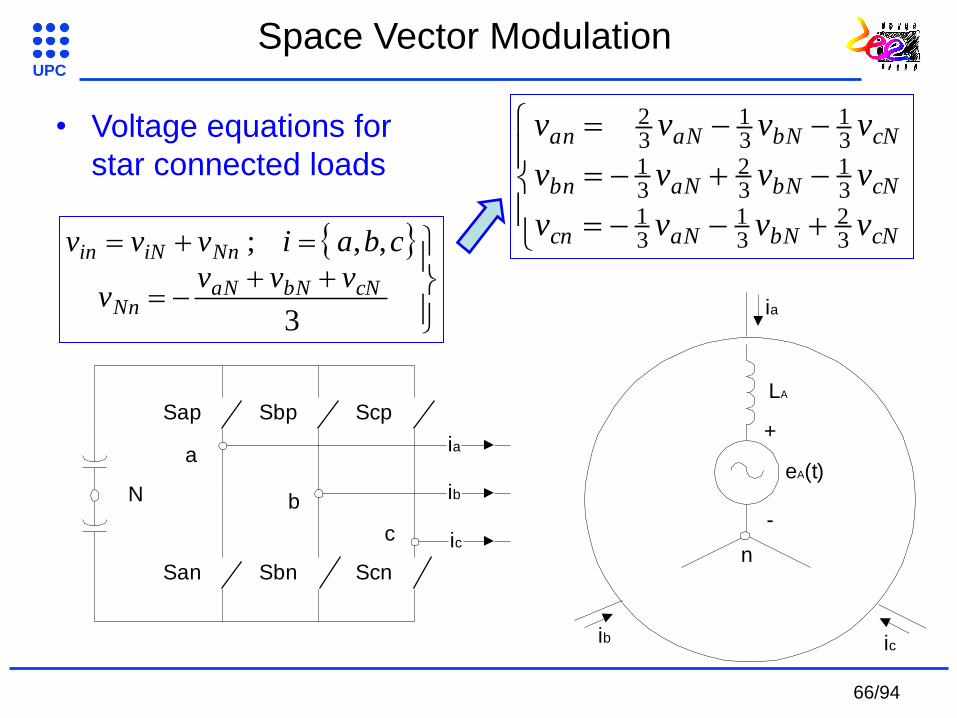
3
,,;
cNbNaNNn
NniNin
vvvv
cbaivvv
cNbNaNcn
cNbNaNbn
cNbNaNan
vvvv
vvvv
vvvv
32
31
31
31
32
31
31
31
32• Voltage equations for
star connected loads
66/94

UPC
cNbNaNcn
cNbNaNbn
cNbNaNan
vvvv
vvvv
vvvv
32
31
31
31
32
31
31
31
32
• Voltage waveforms for star connected load and using
double sided pattern:
V0
T0 /2
V1
T1 /2
V2
T2 /2
V7
T7
V1
T1 /2
V2
T2 /2
V0
T0 /2
• All sequence and V0 and V7 are placed in order to
minimize the commutations.
Space Vector Modulation
67/94

UPC
Vdc/2
VaN
VcN
VbN
VNn
Vcn
Vbn
Van
-Vdc/2
-Vdc/2
-Vdc/6
Vdc/6
Vdc/2
-Vdc/3
-Vdc/3
Vdc/3
Vdc/3
2/3Vdc
-2/3Vdc
Vdc/2
Vdc/2
-Vdc/2
-Vdc/2
TPWM
V2
a b c
V2
a b c
V1
a b c
V1
a b c
V0
a b c
V7
a b c
V0
a b c
68/94
UPC
Lu
eU(t)
ia
icib
+
-
iu
iv
iwN
San
Sap
Sbn
Sbp Scp
Scn
ia
ic
ib
a
b
c
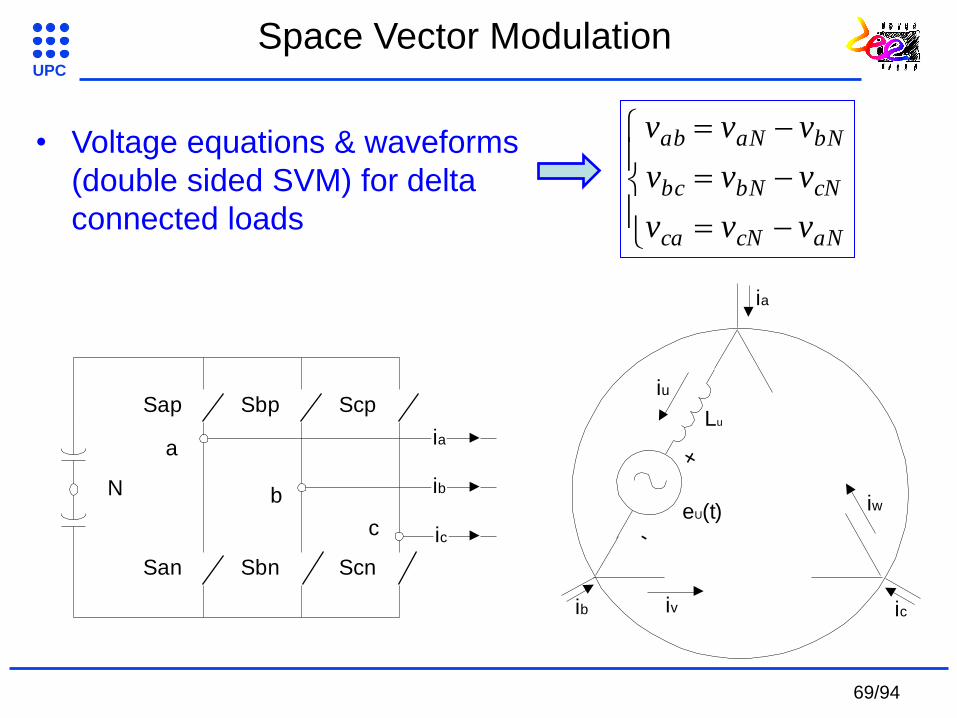
aNcNca
cNbNbc
bNaNab
vvv
vvv
vvv• Voltage equations & waveforms
(double sided SVM) for delta
connected loads
Space Vector Modulation
69/94

UPC
Vdc/2
VaN
VcN
VbN
-Vdc/2
Vdc/2
Vdc/2
-Vdc/2
-Vdc/2
TPWM
Vca
Vbc
Vab
-Vdc
Vdc
Vdc
V2
a b c
V2
a b c
V1
a b c
V1
a b c
V0
a b c
V7
a b c
V0
a b c
70/94

UPC
Fixed-speed WT Variable-speed WT
Case study: Wind Turbine Classification
Advantages:
• More energy production.
• Less mechanical stress.
• Reduce power fluctuation.
• Capacity of noise reduction.
• Greater grid currents control.
Drawbacks:
• Need of power electronic
converters.
• More expensive.
Advantages:
• Robust.
• Low Maintenance.
• Low Price
Drawbacks:
•Uncontrollable reactive power
consumption
•More mechanical strees.
•Gear box
In collaboration with Dr. Josep Pou 71/94

UPC
Case study: Wind Turbine fixed speed
Induction generator operating at fixed speed
Advantages:
- Robust design.
- No need for maintenance.
- Well enclosed.
- Produced in large series.
- Low price.
- Can withstand overloads.
Disadvantages:
- Uncontrollable reactive power consumption.
- Fixed speed means more mechanical stress.
In collaboration with Dr. Josep Pou 72/94

UPC
- Capacitors banks compensate for reactive power from the induction
generator.
- Maxim use of the electrical grid is done operating at unity power
factor.
C C C
Voltage
Current
Capacitor Banks
Case study: Wind Turbine fixed speed
In collaboration with Dr. Josep Pou 73/94
UPC
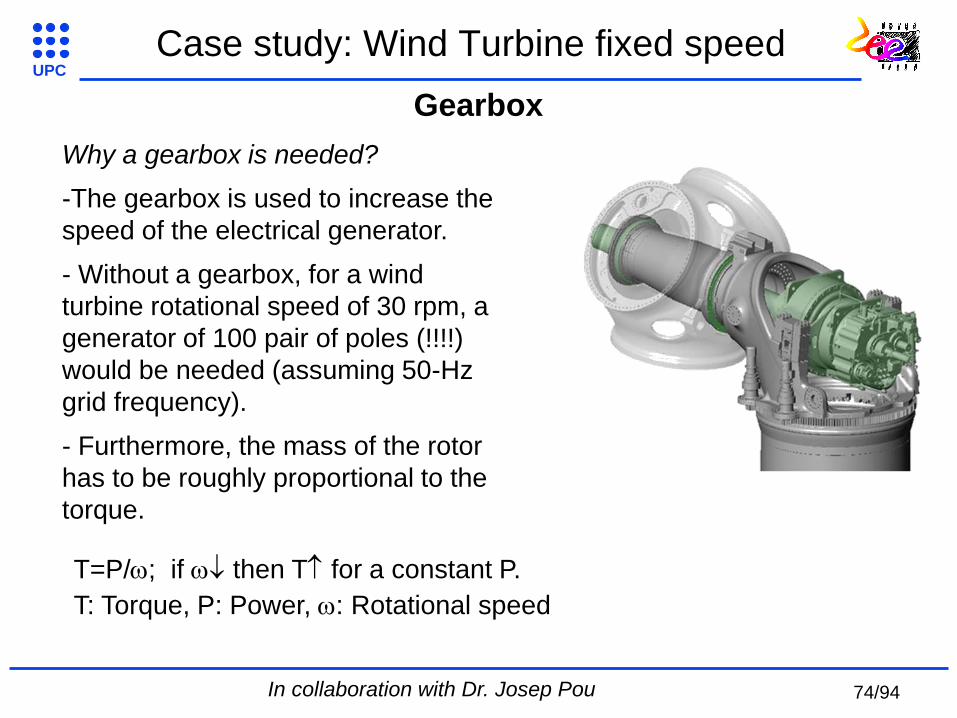
Why a gearbox is needed?
-The gearbox is used to increase the
speed of the electrical generator.
- Without a gearbox, for a wind
turbine rotational speed of 30 rpm, a
generator of 100 pair of poles (!!!!)
would be needed (assuming 50-Hz
grid frequency).
- Furthermore, the mass of the rotor
has to be roughly proportional to the
torque.
T=P/; if then T for a constant P.
T: Torque, P: Power, : Rotational speed
Gearbox
Case study: Wind Turbine fixed speed
In collaboration with Dr. Josep Pou 74/94
UPC
The frequency of the generator voltages can be different from the
electrical grid (50-60 Hz) and therefore the turbine speed can change.
Advantages:
- More energy production.
- Less mechanical stress.
- Reduce power fluctuation.
- Capacity of noise reduction.
- May have more control on the grid currents.
Drawbacks:
- The system requires power electronic converters.
- More expensive.
Case study: Wind Turbine variable speed
In collaboration with Dr. Josep Pou 75/94

UPC
- The slip of the rotor can change within a wide range (and therefore the
wind-turbine speed as well).
- It is the most common topology produced by large manufacturers
nowadays.
ALSTOM-ECOTECNIA
Doubly-Fed Induction Generator (DFIG)
Case study: Wind Turbine variable speed
In collaboration with Dr. Josep Pou 76/94

UPC
-Multipole synchronous generators may not need a gearbox (these
generators have a large diameter).
- The rotational speed can change within a wide range.
- This is expected to be the most common wind turbine configuration in
the future.
?
ENERCON E-126 (7 MW)
Multipole Synchronous Generators (MPSG)
Case study: Wind Turbine variable speed
In collaboration with Dr. Josep Pou 77/94

UPC
Bi-directional
switch
SAc
T2
D2
T1
D1
LOAD
UsB
UsA
UsC
Ua
U U
UC
UB
UA
b c
N
i sC
icibia
i sB
i sA
SAa SAb SAc
SBa SBb SBc
SCa SCb SCcInput RL filter
n
iA
iB
iC
Matrix Converter (from AC to AC)
Case study: Wind Turbine variable speed
78/94

UPC
Back-to-back-connected (three-level) converter
(NP)
C vC2
vC1
C
r Vd
c s
t
a
b
c
Wind-Turbine NPC Converter Grid-Connected NPC Converter
vr
vs
vt
3*Lg iwt ig
Multipole Synchronous Wind Turbine
Electrical Grid
Case study: Wind Turbine variable speed
In collaboration with Dr. Josep Pou 79/94

UPC
Case study: Wind Turbine Control
Wind
Models
In collaboration with Dr. Josep Pou 80/94

UPC
Permanent Magnet
Synchronous Generator Electrical Grid
AC
DC
AC
DC
DTC (Direct Torque Control)
FOC (Field Oriented Control)
DPC (Direct Power Control)
VOC (Voltage Oriented Control)
Dual Solution
• 2 Power Converters & 4 control loops.
– PMSM. Inner current control & outer speed control
– Electrical Grid. Inner current control & outer voltage control
Case study: Wind Turbine Control
81/94

UPC
qv
dv
di
*dcV
Voltage Controller
Current Controller
Current Controller
*qI
qi
dcv
*dI
gL
gL
'dv
'qv
MAF(Tg )
Transf.
rst-dq
ir is it
Angle
Pos. Sequ.
d
Transf.
dq-rst
Grid Voltages
vr vs vt Converter Voltages
vrc vsc vtc Grid
Voltages
vr vs vt
Dip
Detector
Modification
of *dI and *
qI
Yes
Case study: Wind Turbine Control
SVM
LC filter
UsAUsBUsC
V
V
PMSG
32 d q
Iq*
+
PI
PI
+
Id*
-
-d q
Angle Estimation
Algorithm
PWM Pattern m*
+PI-
d/dte^
d/dt
test p
uls
es
ia
ib
ic
UAUBUC
la
lb
lc
n
Va
Vb
Vc
N
Grid
FOC
VOC
In collaboration with Dr. Josep Pou 82/94
UPC
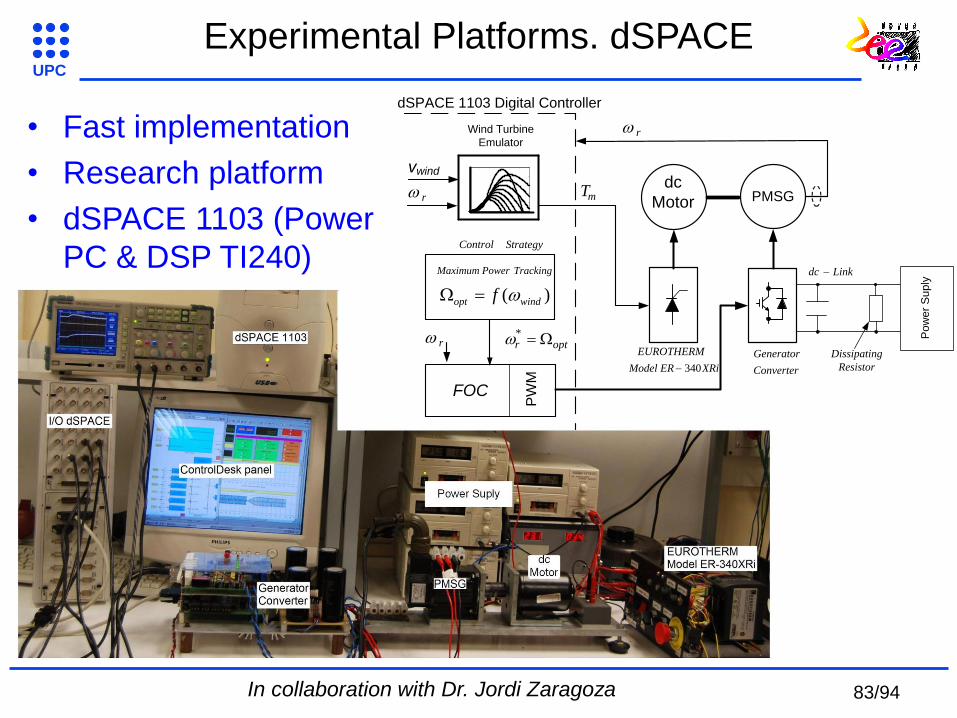
Experimental Platforms. dSPACE
• Fast implementation
• Research platform
• dSPACE 1103 (Power
PC & DSP TI240)
mT
rWind Turbine
Emulator
vwind
optr *
TrackingPowerMaximum
)( windopt f
StrategyControl
PMSG
FOC
dc
Motor
XRiERModel
EUROTHERM
340 Converter
Generatorr
PW
M
Linkdc
Po
we
r S
up
ly
dSPACE 1103 Digital Controller
Dissipating
Resistor
r
In collaboration with Dr. Jordi Zaragoza 83/94

UPC
• Easy to monitor and debug with the Control Desk
In collaboration with Dr. Jordi Zaragoza
Experimental Platforms. dSPACE
84/94
UPC
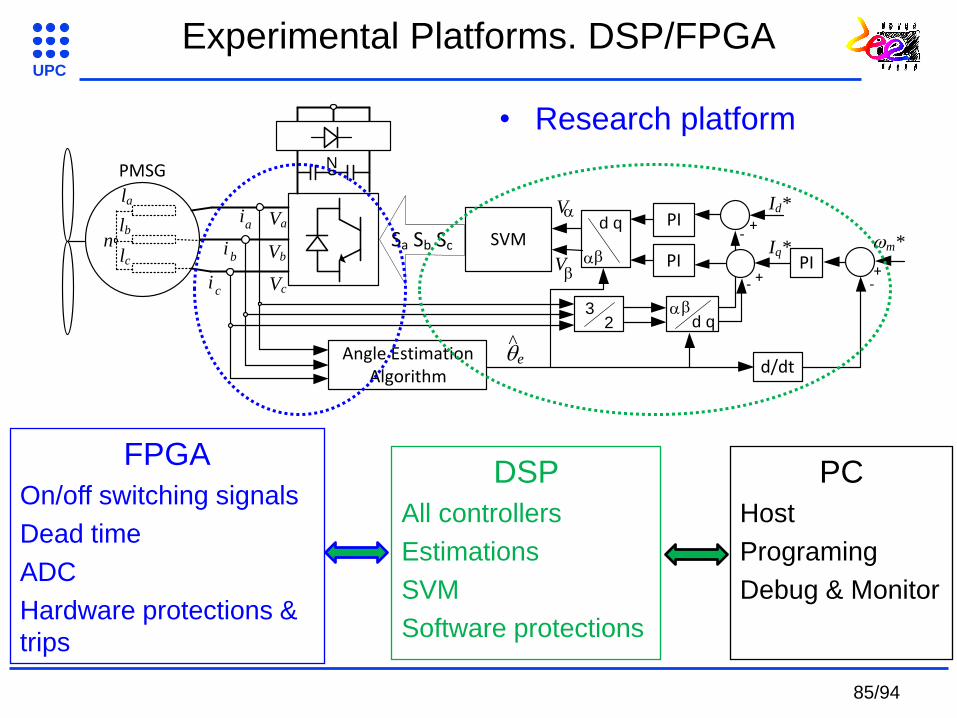
SVM
V
V
PMSG
32 d q
Iq*
+
PI
PI
+
Id*
-
-d q
Angle EstimationAlgorithm
Sa Sb Sc m*
+PI-
e^
d/dt
ia
ib
ic
la
lb
lc
n
Va
Vb
Vc
N
FPGA
On/off switching signals
Dead time
ADC
Hardware protections &
trips
DSP
All controllers
Estimations
SVM
Software protections
PC
Host
Programing
Debug & Monitor
Experimental Platforms. DSP/FPGA
• Research platform
85/94

UPC
In collaboration with Dr. Lee Empringham & Dr. Liliana de Lillo. University of Nottingham. UK. 86/94

UPC
Experimental Platforms. DSPIC
With the permission of MICROCHIP
http://www.microchip.com/pagehandler/en
-us/technology/motorcontrol/home.html
• Industrial platform
87/94

UPC
Experimental implementing issues
• Synchronisation: in order to minimise the commutation noise, the
currents’ sampling instant must be either at the middle or at the end of
the PWM period (i.e. during the applications of zero states V0 or V7).
Vcn
Vbn
Van
V2
a b c
V2
a b c
V1
a b c
V1
a b c
V0
a b c
V7
a b c
V0
a b c
2/3Vdc1/3Vdc
1/3Vdc
-1/3Vdc
-1/3Vdc-2/3Vdc
• Current and speed controllers must be also synchronised with the PWM.
88/94

UPC
Speed loop task
• Priorities: computing resources can be optimised if current loop task
has the highest priority. After the speed loop task and finally any software
for monitoring or debugging.
TintTint Tint
Tint Tint TintTint Tint
Current loop task
Same priority
Different priorities
Experimental implementing issues
89/94

UPC
• Incremental encoder: Number of pulses per interruption?
• It is assumed a sampling time of 100 (µs) and 5 (ms) for the current and
speed, respectively.
srev
pulsesN
rev
min
1060
1
min 6
N 3000 (rev/min) 30 (rev/min)
16384 (pulses/rev) 819,2 (pulses)
40960 (pulses)
8,192 (pulses)
409,6 (pulses)
4096 (pulses/rev) 204,8 (pulses)
10240 (pulses)
2,048 (pulses)
102,4 (pulses)
ms
pulsesN
510
2·60
1 2
s
pulsesN
10010
60
1 4
• Two speeds must be calculated for the speed (higher
accuracy) and current (lower accuracy) loops separately.
Experimental implementing issues
90/94
UPC
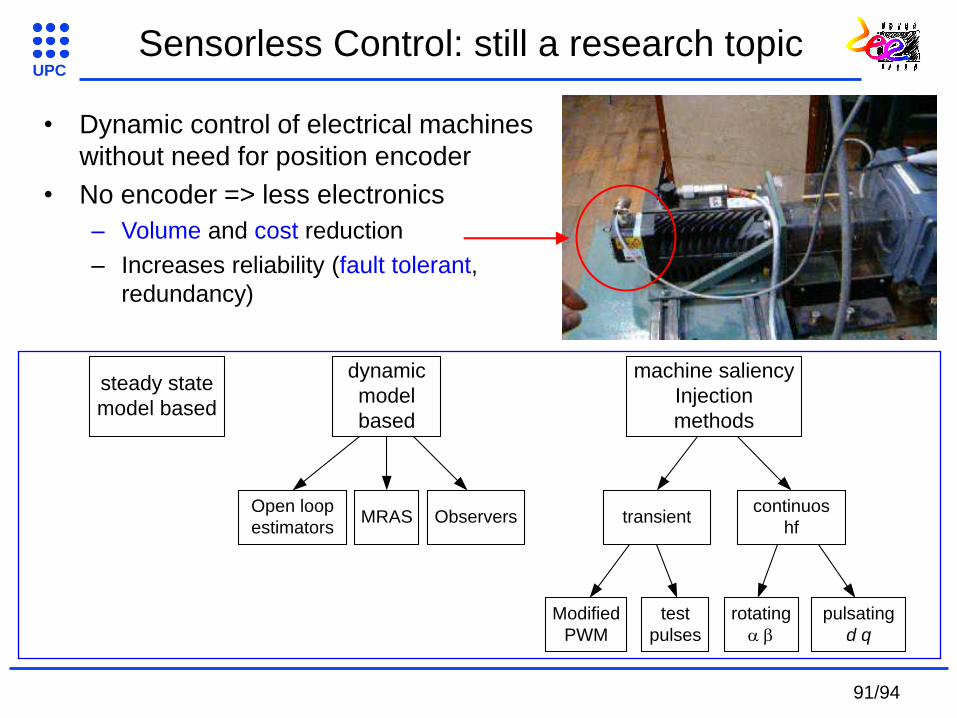
• Dynamic control of electrical machines
without need for position encoder
• No encoder => less electronics
– Volume and cost reduction
– Increases reliability (fault tolerant,
redundancy)
Sensorless Control: still a research topic
steady state
model based
dynamic
model
based
machine saliency
Injection
methods
Open loop
estimatorsMRAS Observers transient
continuos
hf
Modified
PWM
test
pulses
rotating
pulsating
d q
91/94

UPC
• Permanent Magnet Synchronous Machines
– Advantages:
• No rotor currents => no rotor losses.
• Higher efficiency => energy saving capability.
• Smaller rotor diameters, higher power density and lower rotor
inertia.
• Attractive for Wind applications, Aerospace applications such
as aircraft actuators, Machine tools, position servomotors
(replacing the DC motors).
– Inconveniences:
• Synchronous machines => need for rotor position.
• Price.
• Permanent magnet is becoming a scarce raw material.
Summary
92/94

UPC Summary
• PMSM dynamic equations and modelling
• FOC for PMSM has been introduced
– Principles & Scheme.
– PI & IP Controllers: root locus, specifications, design and
implementation.
• Classical DTC
– VSI Review.
– Principles, features & scheme.
– Hysteresis controllers.
• Space Vector Modulation
– Voltage equations & voltage waveforms.
– Dead time.
93/94
UPC
• Case study: Wind Turbine
– Constant versus variable speed.
– Dual solution for the Grid Connected Power Converter.
• Experimental approach
– Hardware platforms.
– (Some typical) implementing issues.
• Research: Sensorless Control of PMSM
Summary
94/94

















