Using UAV as an extension of ILS ground measurements: Already a reality in Switzerland! IFIS 2018 H. Demule, skyguide, swiss air navigation services K. Theißen, Rohde & Schwarz GmbH & Co. KG
Transcript
Using UAV as an extension of ILS ground measurements:
Already a reality in Switzerland!
IFIS 2018H. Demule, skyguide, swiss air navigation servicesK. Theißen, Rohde & Schwarz GmbH & Co. KG
Content
› ILS measurements: current situation› Why NOT using an UAV multicopter?› Why using an UAV multicopter?› The development project› Description of the solution› Achievements› Conclusion and outlook
2
ILS measurements: current situation
From ICAO Doc 8071 guidance material:
› ILS ground measurements are recommended.
› Correlation between ground and flight measurements is the main criterion for reducing the flight check frequency
› "Equal responsibility on ground and airborne personnel"
3
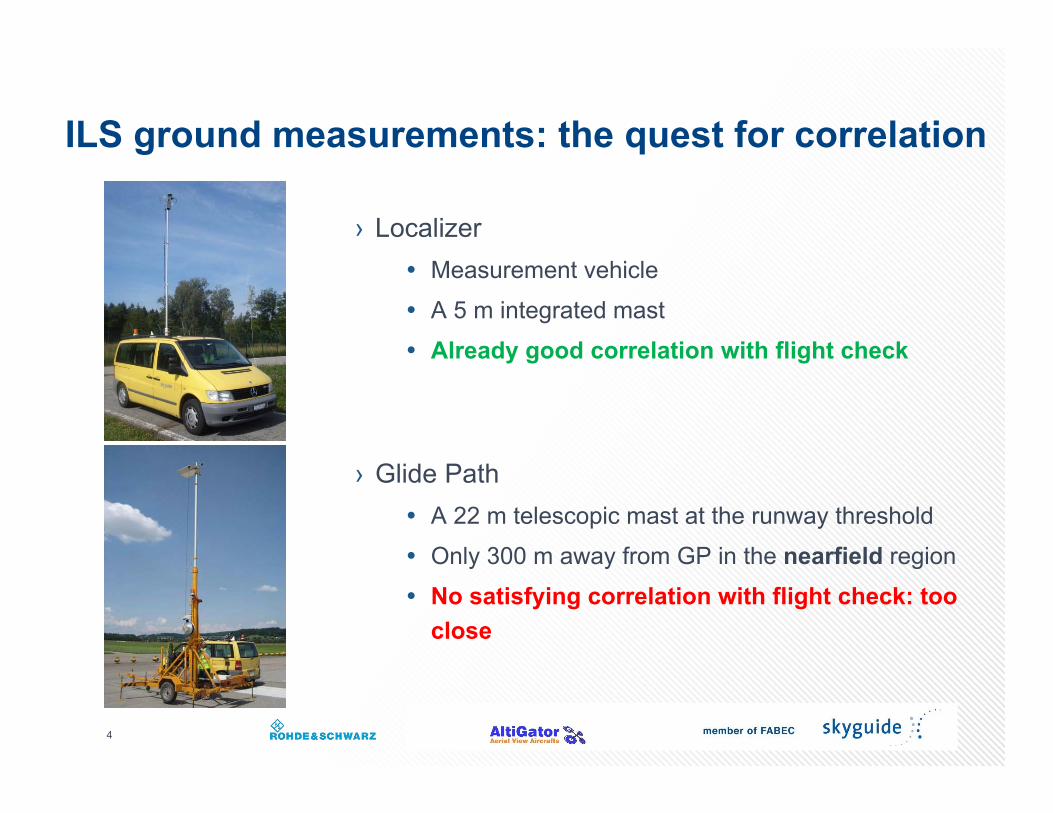
ILS ground measurements: the quest for correlation
› Localizer Measurement vehicle A 5 m integrated mast Already good correlation with flight check
› Glide Path A 22 m telescopic mast at the runway threshold Only 300 m away from GP in the nearfield region No satisfying correlation with flight check: too
close
4
Content
› ILS measurements: current situation› Why NOT using an UAV multicopter?› Why using an UAV multicopter?› The development project› Description of the solution› Achievements› Conclusion and outlook
5
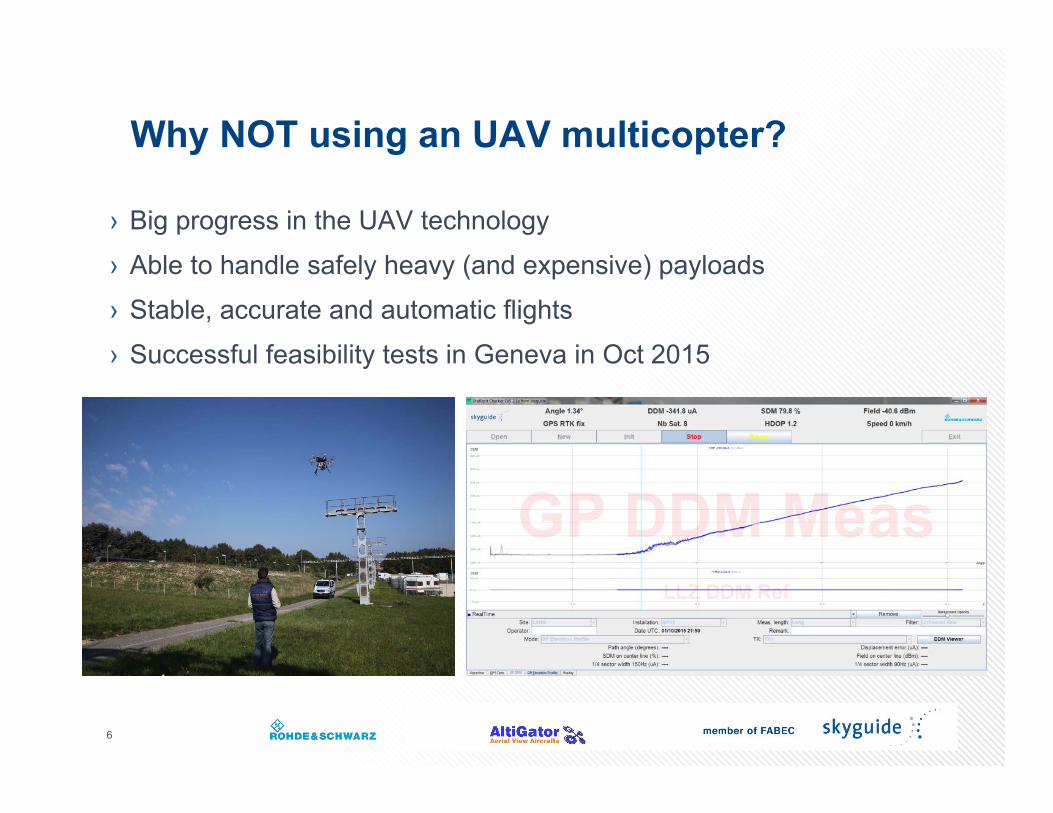
Why NOT using an UAV multicopter?
› Big progress in the UAV technology› Able to handle safely heavy (and expensive) payloads› Stable, accurate and automatic flights› Successful feasibility tests in Geneva in Oct 2015
6
Why using an UAV multicopter?
› Correlation of nearfield GP measurements not satisfying › In the farfield, in order to enable good correlation:
At least 1.5 km from GP Thus at a height of approx. 80 m
› An extension of ground measurements› Not a replacement, but a complement to flight check› Demonstration of correlation will enable to reduce flight check frequency
7
Content
› ILS measurements: current situation› Why NOT using an UAV multicopter?› Why using an UAV multicopter?› The development project› Description of the solution› Achievements› Conclusion and outlook
8
The development project
› Successful feasibility tests in Oct 2015
9
› Study and concept phases from Oct 2015 to Feb 2016: a very positive business case
› The development, test and training phases: from March 2016 to Dec 2017
A customized development of the UAV from Altigator
The new ILS receiver from Rohde&Schwarz
Upgrade of the Preflight Checker SW from skyguide
Content
› ILS measurements: current situation› Why NOT using an UAV multicopter?› Why using an UAV multicopter?› The development project› Description of the solution› Achievements› Conclusion and outlook
10
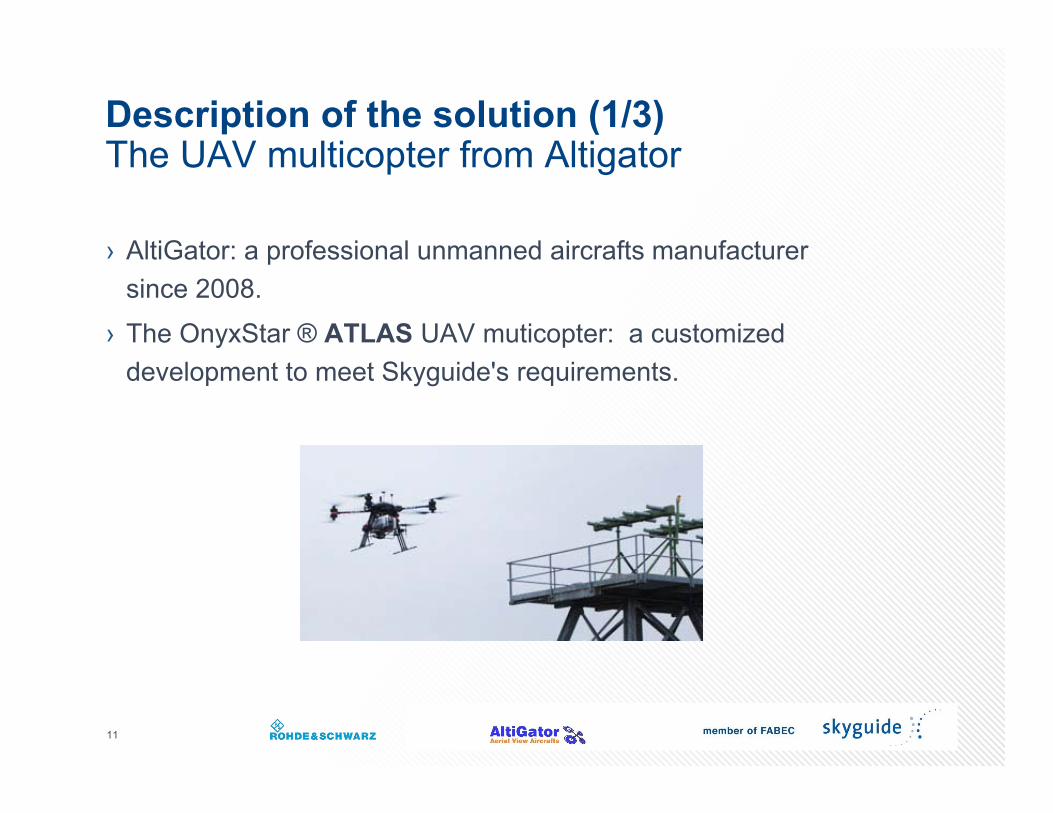
Description of the solution (1/3)The UAV multicopter from Altigator
› AltiGator: a professional unmanned aircrafts manufacturer since 2008.
› The OnyxStar ® ATLAS UAV muticopter: a customized development to meet Skyguide's requirements.
11
12
Description of the solution (1/3)The UAV multicopter from Altigator
Robust structure
GPS RTKnavigation
Automatic operation
R&S receiverintegration
Manual controlpriority
Compact for transportation
Navigationrepeatability Powerful
13
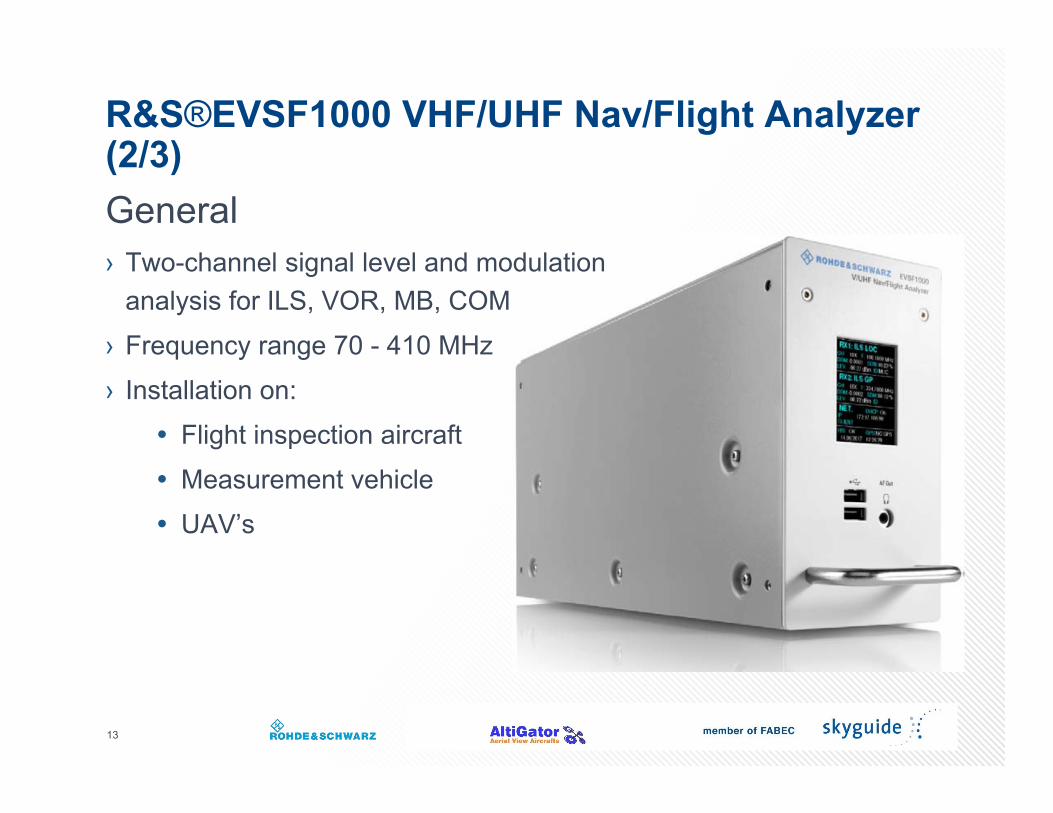
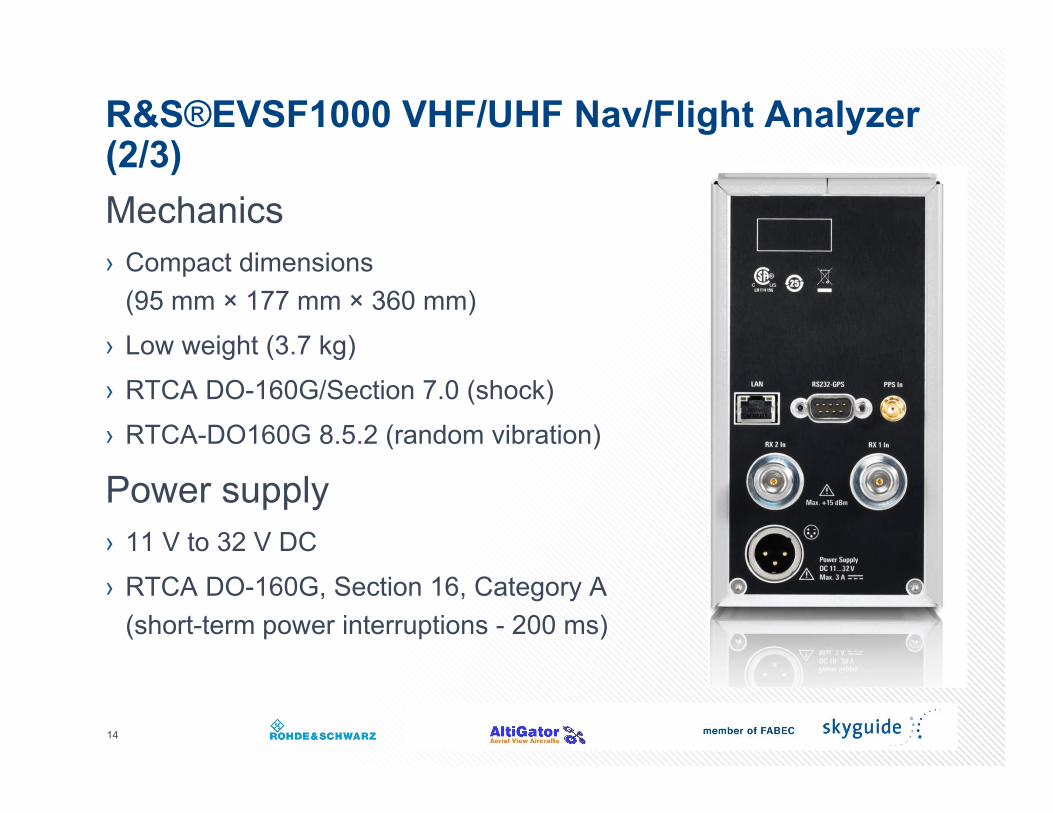
R&S®EVSF1000 VHF/UHF Nav/Flight Analyzer (2/3)General› Two-channel signal level and modulation
analysis for ILS, VOR, MB, COM › Frequency range 70 - 410 MHz› Installation on:
(95 mm × 177 mm × 360 mm)› Low weight (3.7 kg)› RTCA DO-160G/Section 7.0 (shock)› RTCA-DO160G 8.5.2 (random vibration)
Power supply› 11 V to 32 V DC› RTCA DO-160G, Section 16, Category A
(short-term power interruptions - 200 ms)
15
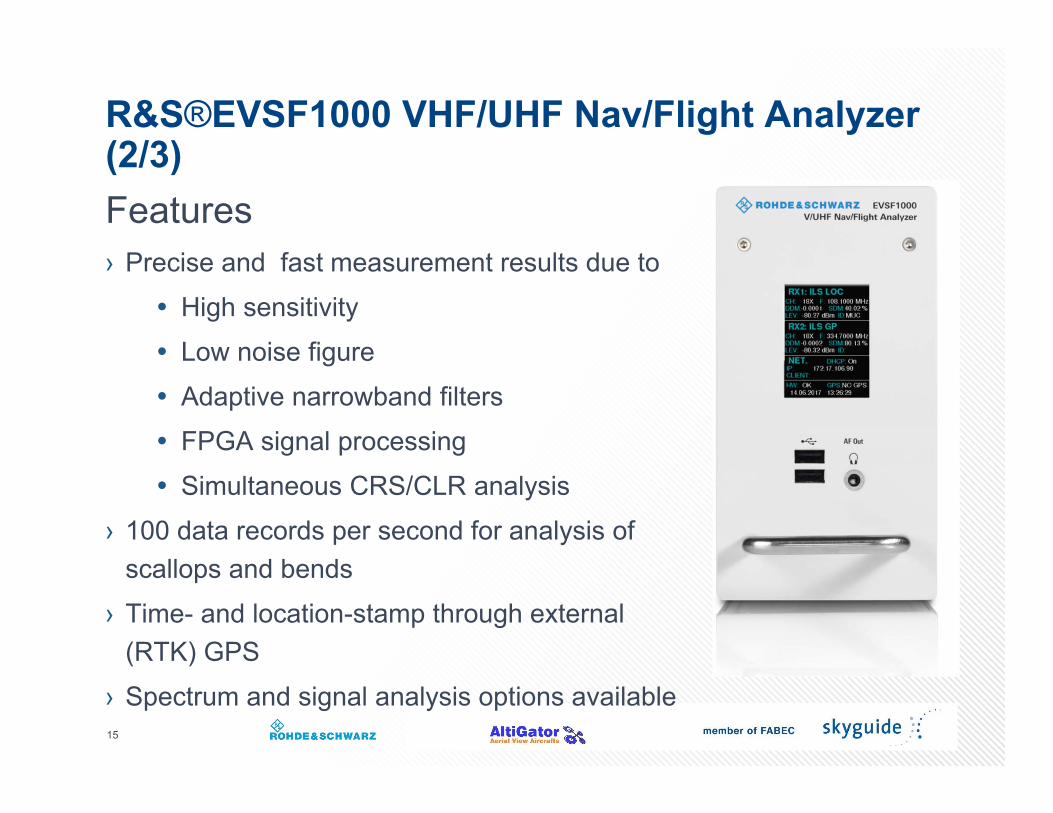
R&S®EVSF1000 VHF/UHF Nav/Flight Analyzer(2/3)Features› Precise and fast measurement results due to
High sensitivity Low noise figure Adaptive narrowband filters FPGA signal processing Simultaneous CRS/CLR analysis
› 100 data records per second for analysis ofscallops and bends
› Time- and location-stamp through external (RTK) GPS
› Spectrum and signal analysis options available
Description of the solution (3/3)The Preflight Checker SW from skyguide
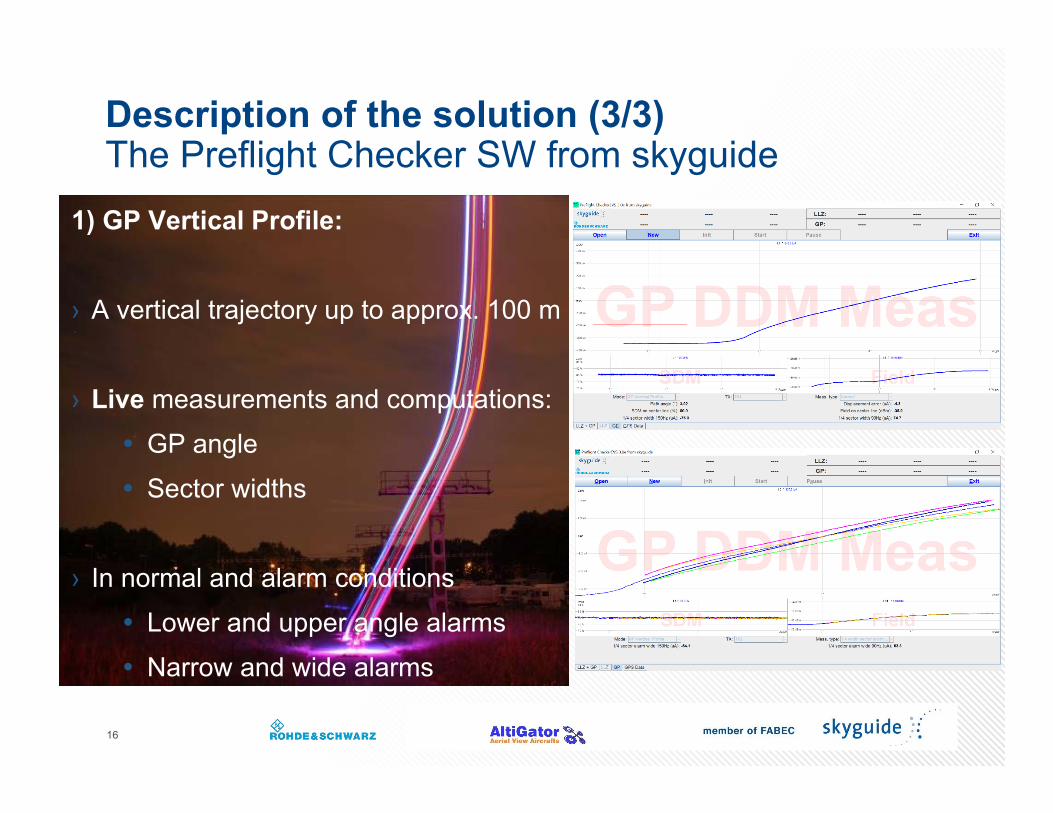
1) GP Vertical Profile:
› A vertical trajectory up to approx. 100 m
› Live measurements and computations: GP angle Sector widths
› In normal and alarm conditions Lower and upper angle alarms Narrow and wide alarms
16
Description of the solution (3/3)The Preflight Checker SW from skyguide
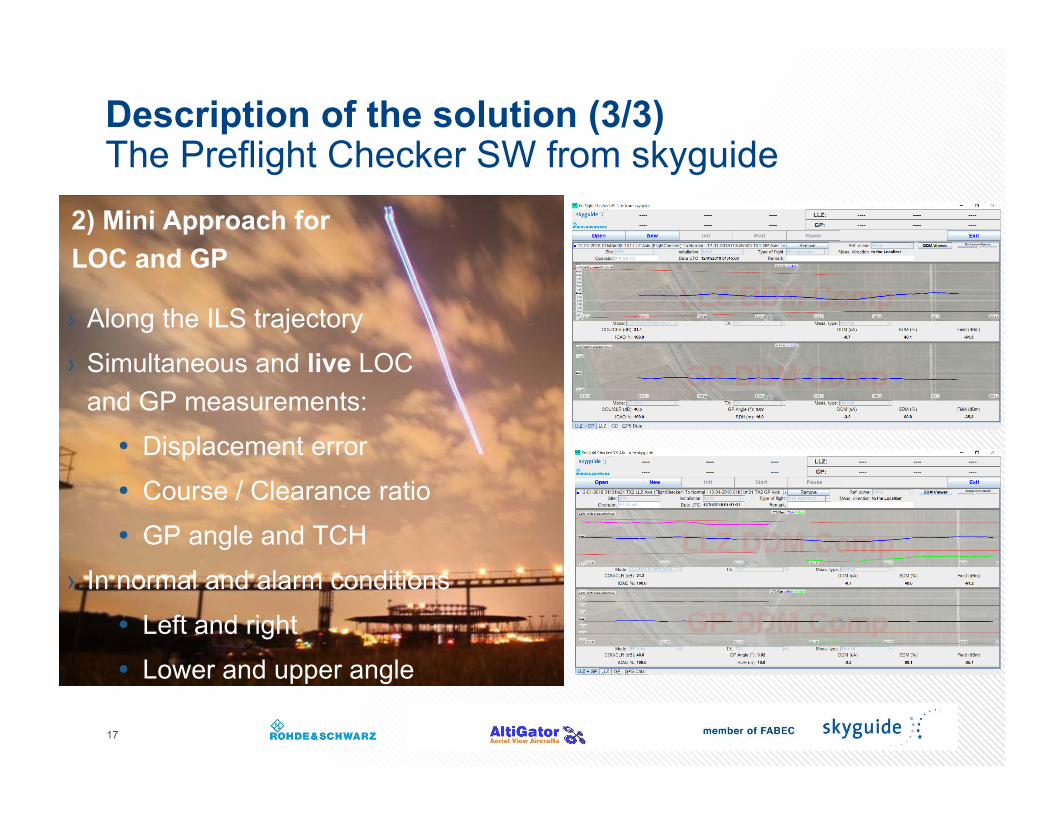
2) Mini Approach for LOC and GP
17
› Along the ILS trajectory› Simultaneous and live LOC
and GP measurements: Displacement error Course / Clearance ratio GP angle and TCH
› In normal and alarm conditions Left and right Lower and upper angle
Description of the solution (3/3)The Preflight Checker SW from skyguide
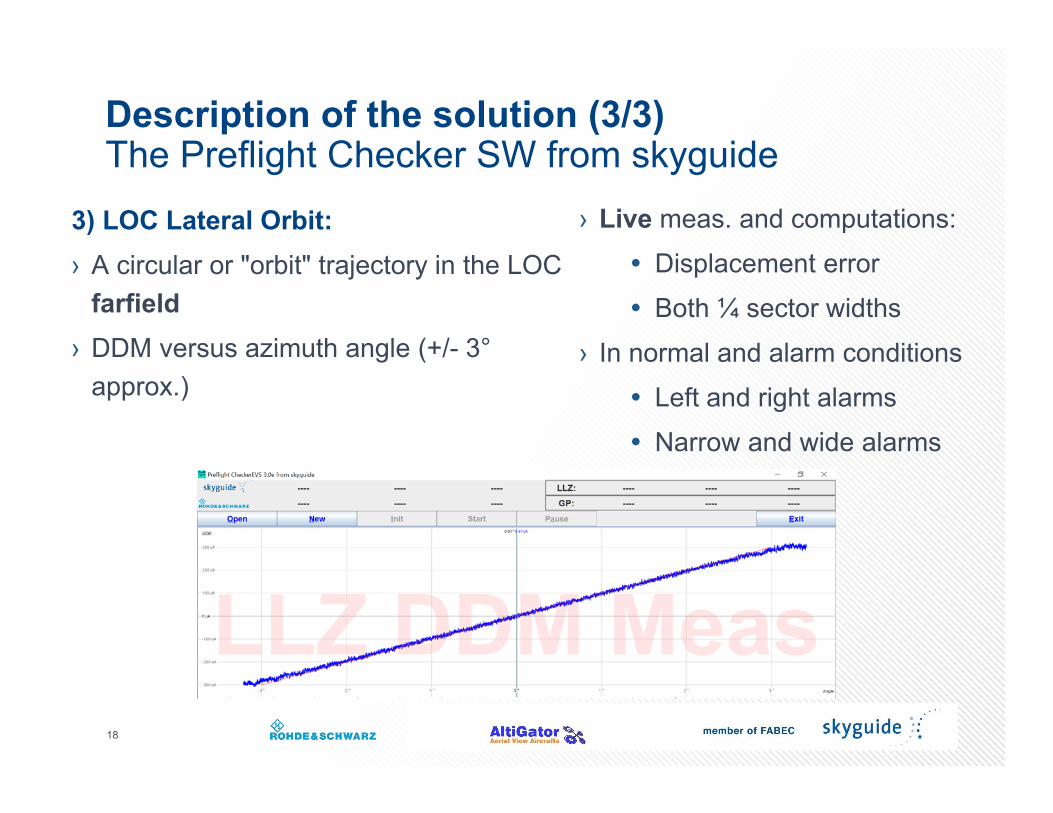
3) LOC Lateral Orbit:› A circular or "orbit" trajectory in the LOC
farfield› DDM versus azimuth angle (+/- 3°
approx.)
18
› Live meas. and computations: Displacement error Both ¼ sector widths
› In normal and alarm conditions Left and right alarms Narrow and wide alarms
Content
› ILS measurements: current situation› Why NOT using an UAV multicopter?› Why using an UAV multicopter?› The development project› Description of the solution› Achievements› Conclusion and outlook
19
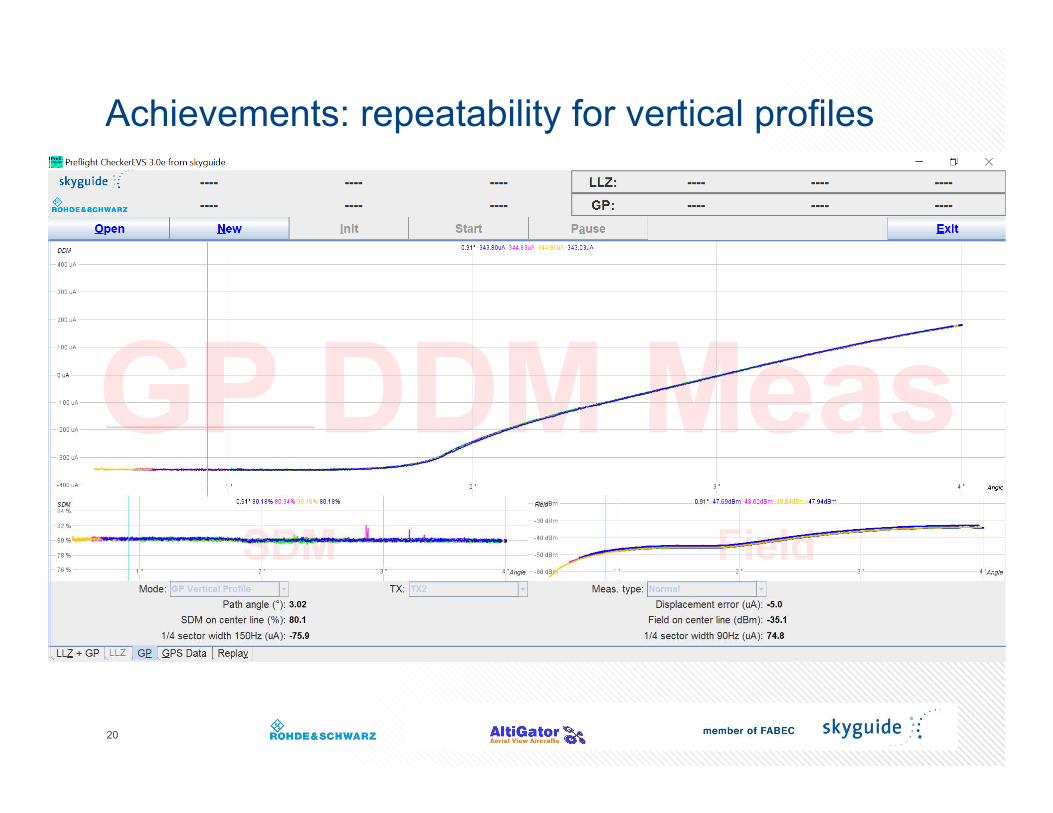
Achievements: repeatability for vertical profiles
20
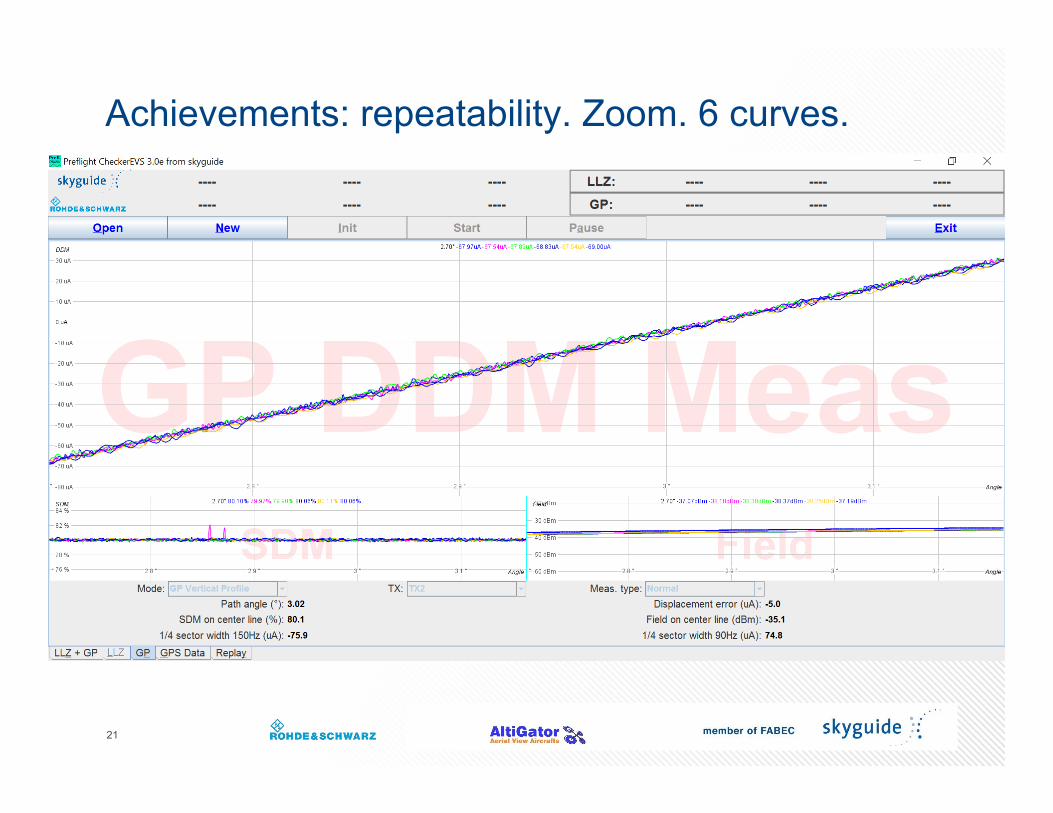
GP Vertical Profile: 3 curves from Jan. to March 2018› 0.3 µA for the GP angle (+/- 0.0014°)› 0.2 µA for the ¼ sector widths (+/- 0.001°)
21
Achievements: repeatability. Zoom. 6 curves.
22
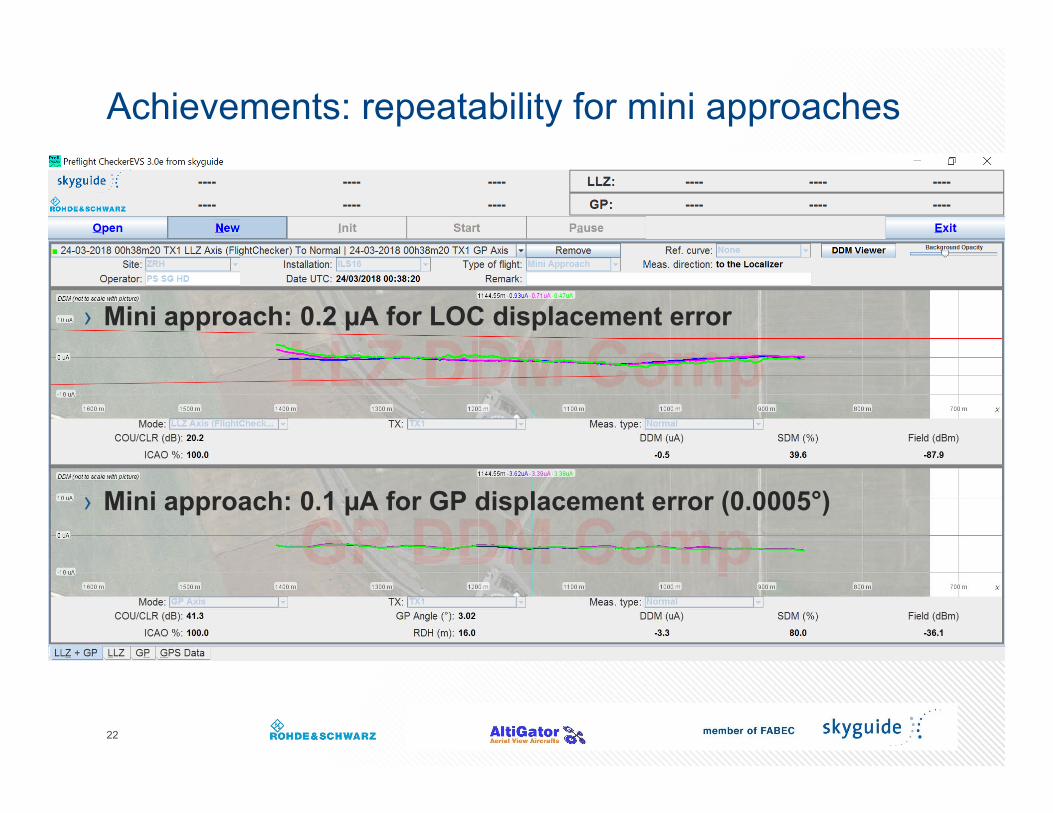
Achievements: repeatability for mini approaches
› Mini approach: 0.2 µA for LOC displacement error
› Mini approach: 0.1 µA for GP displacement error (0.0005°)
23
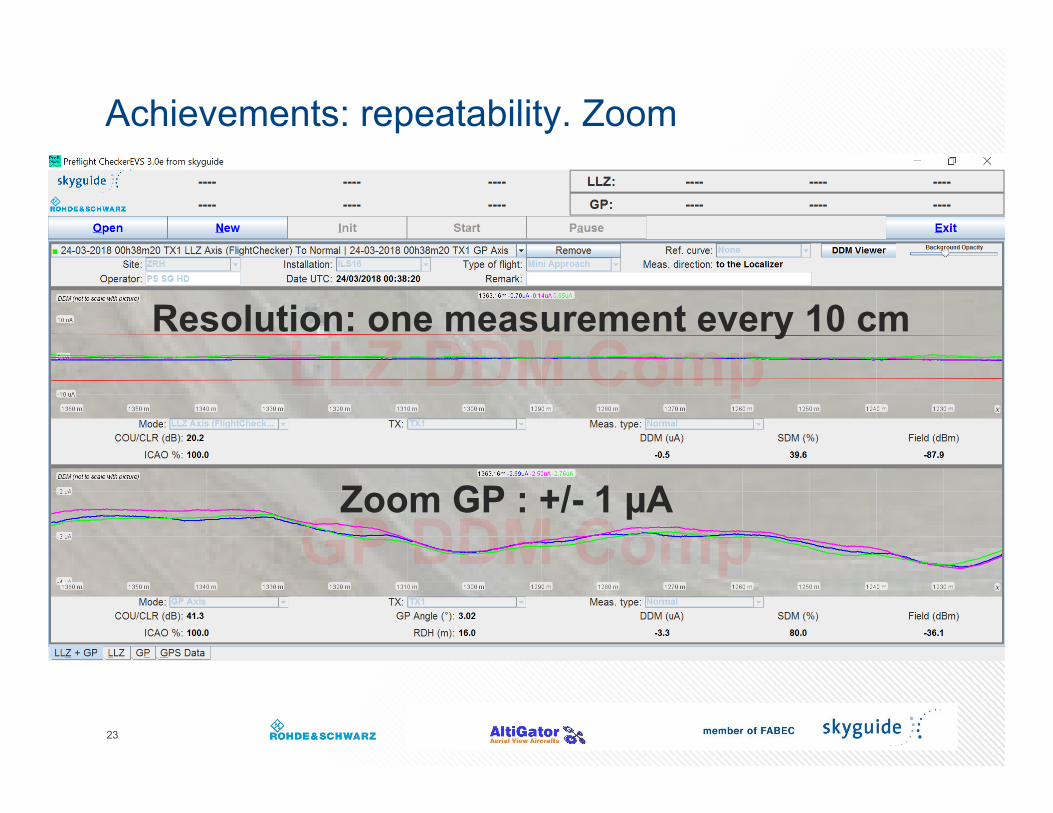
Achievements: repeatability. Zoom
Zoom GP : +/- 1 µA
Resolution: one measurement every 10 cm
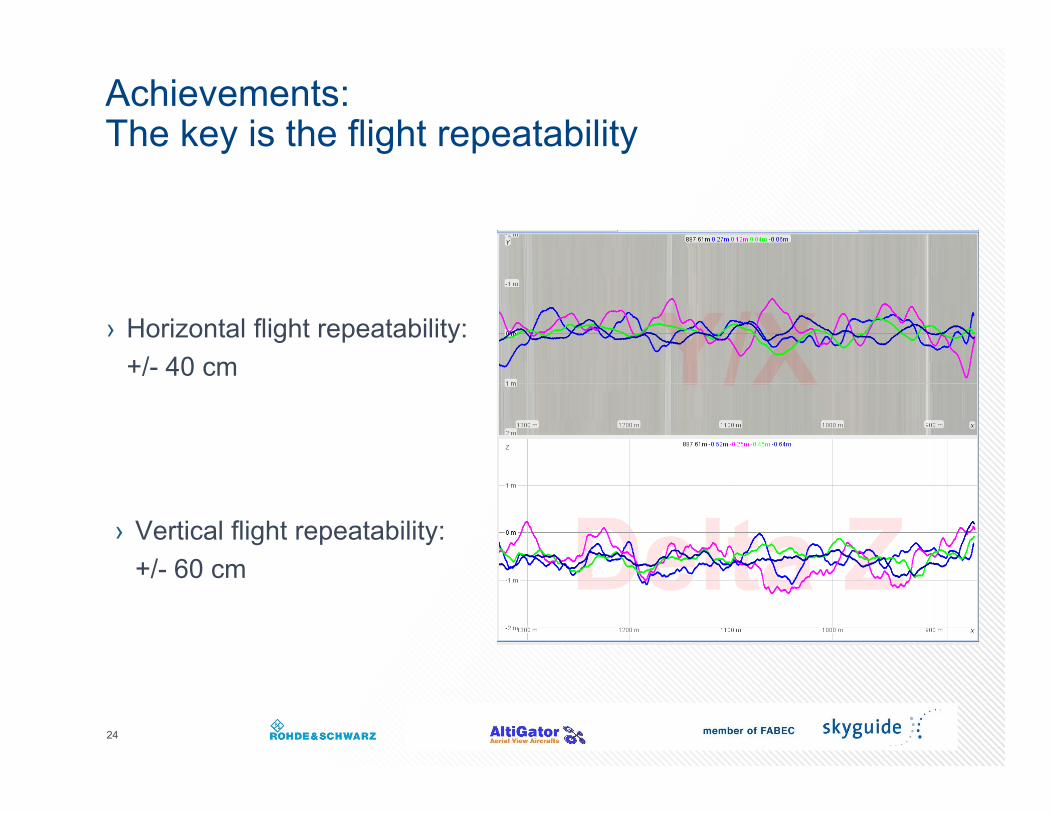
› Horizontal flight repeatability: +/- 40 cm
24
Achievements:The key is the flight repeatability
› Vertical flight repeatability: +/- 60 cm
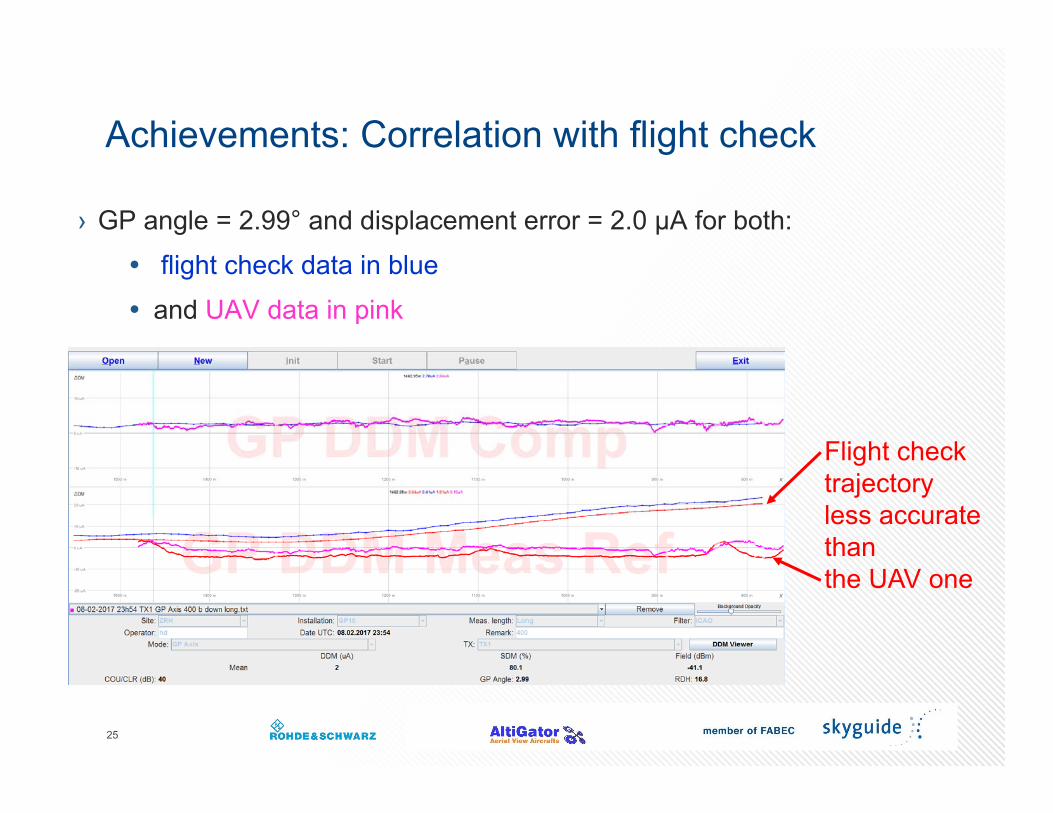
Achievements: Correlation with flight check
› GP angle = 2.99° and displacement error = 2.0 µA for both: flight check data in blue and UAV data in pink
25
Flight check trajectory less accurate than the UAV one
Content
› ILS measurements: current situation› Why NOT using an UAV multicopter?› Why using an UAV multicopter?› The development project› Description of the solution› Achievements› Conclusion and outlook
26
Conclusion and outlook
› Successful operation since January 2018
› A major step in the ILS maintenance domain: Preventive and corrective maintenance Preparation of ILS commissioning
› It opens new horizons in terms of CNS measurement techniques: Resolution and repeatability For VOR, DF, PAPI, radars…