216
SVEUČILIŠTE U ZAGREBU GRAĐEVINSKI FAKULTET Željko Lebo USPOREDBA KRUTOSTI TALA PRI MALIM DEFORMACIJAMA MAGISTARSKI RAD Zagreb, 2011.

SVEUČILIŠTE U ZAGREBU GRAĐEVINSKI FAKULTET
Željko Lebo
USPOREDBA KRUTOSTI TALA PRI MALIM DEFORMACIJAMA
MAGISTARSKI RAD
Zagreb, 2011.

UNIVERSITY OF ZAGREB
FACULTY OF CIVIL ENGINNERING
Željko Lebo
COMPARISON OF SOIL STIFFNESS IN SMALL STRAIN
MASTER′′′′S THESIS
Zagreb, 2011.

SVEUČILIŠTE U ZAGREBU GRAĐEVINSKI FAKULTET
Željko Lebo
USPOREDBA KRUTOSTI TALA PRI MALIM DEFORMACIJAMA
MAGISTARSKI RAD
Mentor: prof.dr.sc. Antun Szavits-Nossan
Zagreb, 2011.

ZAHVALE
Zahvaljujem svojem mentoru, prof.dr. Antunu Szavits-Nossanu na velikoj pomoći
koju mi je pružio pri izradi ovog magisterija, na iskrenim savjetima i korisnim
raspravama.
Za potrebe ovoga rada provedeni su pokusi ispitivanja malih deformacija na pijesku
u laboratoriju Zavoda za geotehniku na Građevinskom fakultetu Sveučilišta u Zagrebu.
Stoga svim djelatnicima laboratorija tog Zavoda iskreno zahvaljujem na podršci, a
osobito kolegi Duji Zlatoperu na nesebičnoj pomoći kod provedbe pokusa.
Zahvaljujem se djelatnicima laboratorija Zavoda za geotehniku Instituta
građevinarstva Hrvatske na nesebičnoj pomoći pri provedbi određenih pokusa na
pijesku, a osobito kolegici Snježani Sesar i kolegi Andriji Haluška.
Osobito zahvaljujem svojoj supruzi Snježani i djeci, Dariji, Ivanu i Lani, na
motivaciji i neiscrpnoj podršci, koju su mi pružili za vrijeme izrade ovoga rada.

Ovaj rad posvećen je mojoj obitelji

I
SAŽETAK
U radu je dat pregled najnovijih metoda i tehnika mjerenja malih deformacija na
uzorku tla u geotehničkim laboratorijima, te određivanja krutosti tla pri malim
deformacijama. Primjenom računalne tehnologije u geotehničkim laboratorijima, te
pojavom novih tehnika preciznog mjerenja pomaka na samom uzorku u laboratoriju,
otkrivaju se nove spoznaje o krutosti tla pri malim i vrlo malim deformacijama. Sve
većim razvojem mjerne tehnike, najnovija osjetila koja se koriste u geotehničkim
laboratorijim mogu registrirati pomake, odnosno deformacije veličine i preko 10-5 (%),
a da su pri tome uporabljive u interpretativne svrhe ponašanja tla. Također u radu su
opisane tehnike i postupci određivanja krutosti tla na terenu (in situ). Takve metode su
uglavnom bazirane na mjerenju brzine prolaza valova (zvuka) kroz tlo. Metode
mjerenja krutosti tla na terenu, spadaju u grupu tzv. geofizičkih metoda, čiji su rezultati
interpretirani kroz poznatu empirijsku formulaciju da je brzina širenja valova ovisna o
odnosu posmičnog modula i gustoće tla.
Rad opisuje postupak ispitivanja naponsko deformacijskih odnosa i krutosti pijeska
u troosnom uređaju. Uzorak pijeska uzet je iz rijeke Save, s lokaliteta okolice grada
Zagreba. Uzorci su pripremani u tri grupe različite zbijenosti, odnosno početnog
koeficijenta pora, kroz monotona ne drenirana smicanja do sloma pri različitim
naprezanjima konsolidacije. Za mjerenje malih deformacija i krutosti prijenjena je
metoda mjerenaja Hall effekt osjetilima, te bender elementima (BE). To su prva
uspješna mjerenja bender elementima u laboratoriju Zavoda za geotehniku na
Građevinskom fakutetu Sveučilišta u Zagrebu.
Rezultati provedenih ispitivanja pokazuju da se uklapaju u trendove rezultata
ispitivanja nekih drugih autora (Hardin i dr. 1994, Li i Yang 1998, Vučetić i Dobry
1991, Ishibashi i Zang 1993, Matešić 2002), gdje se potvrđuje da je posmična krutost tla
ovisna o zbijenosti tla i (sfernom) konsolidacijskom naprezanju. Na temelju rezultata
potvrđeno je da početni posmični modul tla pri vrlo malim posmičnim deformacijama
odgovara posmičnom modulu koji se određuje mjerenjem brzine posmičnih valova

II
metodom bender elemenata (Dano i dr. 2003, Jovičić 2009, Chee-Ming Chan 2010).
Rezultati ispitivanja potvrđuju dvije važne spoznaje.
Prvo, u području malih deformacija ponašanje tla, pa i krutih glina, izrazito je
nelinearno, (dok se do 80 – tih godina mislilo da je linearano). Na primjer, posmična
krutost tla u području posmičnih deformacija od 0,01% do 1% pada s porastom
deformacija i preko 10 (deset) puta.
Drugo, posmična je krutost tla pri malim deformacijama izrazito veća od one
mjerene u konvencionalnim troosnim uređajima. Razlog tome je značajna razlika u
mjerenim deformacijama klasičnim načinom preko postolja ili kape uzorka u odnosu na
mjerenje deformacija izravno na površini uzorka tla. Slična su zapažanja primijećena i
za druge vrste tla, na primjer kredu, a posebno za tla veće krutosti.
Također dugo se, naime, smatralo da su krutosti tla dobivene dinamičkim pokusima
neprimjerene za analize sa statičkim opterećenjem. Međutim nova tehnologija mjerenja
malih deformacija izravno na uzorku tla, pomogla je smanjenju razlike u, do nedavno,
različitom poimanju statičke i dinamičke posmične krutosti tla.
Ključne riječi: krutost, male deformacije, pijesak, metoda mjerenja

III
SUMMARY
This thesis reviews the latest methods and techniques for measuring small strains on
a sample of soil in geotechnical laboratories, as well as techniques for determining soil
stiffness at small strain. The application of computer technology in geotechnical
laboratories, and the emergence of new techniques for conducting precise measurements
of movements in a sample in the laboratory have brought about new insights relating to
the soil stiffness at very small and small strains. Owing to an increasing development of
measurement techniques, the latest sensors used in the geotechnical laboratories can
register shifts over 10-5 (%), being at the same time usable to analyze soil behavior. The
thesis also describes the techniques and procedures for determining soil stiffness on the
ground (in situ). Such methods are mainly based on measuring the velocity of waves
(sound) through the soil. Methods of measuring soil stiffness on the ground are
classified as geophysical methods, the results of which are interpreted using a well-
known empirical formulation according to which the velocity of waves depends on the
relationship between a shear modulus and the density of soil.
The thesis describes a procedure for testing the stress-strain relationship and
stiffness in the triaxial device. A sample of sand was taken from the river Sava
surrounding the city of Zagreb. Samples were classified into three groups of different
density, i.e. the initial void ratio, the monotonic drained shear and the failure at different
stress consolidations. In order to measure small strain and stiffness measurement
techniques Hall effect senses and bender elements (BE) were used. These have been the
first successful measurements using bender elements in the laboratory of the
Department for Geotechnical Faculty at the Faculty of Civil Engineering, University of
Zagreb.
The results of the tests are congruent with the the test results of other authors
(Hardin et al 1994, Li and Yang 1998, Vučetić and Dobry 1991, Ishibashi and Zang
1993, Matešić 2002), confirming that the shear stiffness of soil depends on soil
compaction and (spherical) consolidation stress. The results have confirmed that the
initial shear modulus of soil at very low sliding shear strain corresponds to the shear

IV
module, which is determined by measuring the velocity of shear waves using bender
elements (Dano et al 2003, Jovičić 2009, Chee-Ming Chan, 2010). Therefore, the test
results have confirmed two relevant insights.
First, in the small strain domain, the behavior of soils, including also stiff clay, has
shown to be extremely non-linear, and not linear as it had been commonly held until the
80s of the 20th century. For example, the shear stiffness of the soil in the shear strain
within 0.01% to 1% decreases with increasing strain, to be more precise it can even be
10 (ten) times lower.
Second, the shear stiffness of soils at small strains is significantly higher than those
measured in conventional triaxial apparatus. The reason for this is a significant
difference in the measured deformation when using the conventional method over the
base or cap of the sample versus measuring strain directly on the surface of the soil
sample. Similar observations were noticed also with other types of soil, e.g. chalk, as
well as with soils with higher stiffness.
In addition, it had long been believed that the figures for soil stiffness obtained by
dynamic tests are inappropriate for the analysis of the static load. However, the recent
measurement technology for small strain directly on the soil sample has helped reduce
the differences in the perception of static and dynamic shear stiffness of the soil.
Key words: stiffness, small strain, sand, method of measurement
V
SADRŽAJ
SAŽETAK ............................................................................................................ I
SUMMARY ....................................................................................................... III
SADRŽAJ ............................................................................................................ V
POPIS TABLICA ................................................................................................. VII
POPIS SLIKA ....................................................................................................... VIII
KRATICE ....................................................................................................... XV
SIMBOLI ....................................................................................................... XVI
1. UVOD ....................................................................................................... 1
1.1. Predmet i cilj rada .......................................................................... 1
1.2. Prikaz rada ...................................................................................... 5
2. OSNOVNI POJMOVI ELASTIČNOSTI I KRUTOSTI TLA ....................... 7
2.1. Općenito o tlu i njegovim karakteristikama ........................................ 7
2.2. Definiranje osnovnih elastičnih konstanti ........................................ 9
2.3. Povjesni pregled krutosti tla pri malim deformacijama ....................... 15
3. KRUTOST TLA I METODE MJERENJANJA MALIH
DEFORMACIJA ...................................................................................... 20
3.1. Općenito o krutosti tla pri malim deformacijama ............................. 20
3.2. Krutost tla i metode mjerenja malih deformacija u laboratoriju ............ 22
3.2.1. Mjerenje rezonantnim stupcem RCT (Resonant Column Test) ...... 23
3.2.2. Pokus DSDSS (Double Specimen Direct Simple Shear Test) ...... 35
3.2.3. Mjerenje bender elemantima BE (Bender Elements) ................. 44
3.2.4. Mjerenje Hall effect osjetilima (Hall Effect Local Strain Transducers) 70
3.2.5. Mjerenje LTD osjetilima (Local Deformation Transducers) ...... 78
3.2.6. Mjerenje LVDT osjetilima (Linear Variable Differential Transducer) 86
3.3. Mjerenje krutosti tla na terenu ......................................................... 92

VI
3.3.1. Mjerenje seizmičkom refrakcijom .............................................. 92
3.3.2. Mjerenje metodom Cross-Hole .................................................... 96
3.3.3. Mjerenje metodom Down-Hole i Up Hole ................................... 98
3.3.4. Mjerenje sprektralnom analizom površinskih valova SASW ...... 100
4. ISPITIVANJE PIJESKA U TROOSNOM UREĐAJU ............................. 107
4.1. Općenito o troosnom uređaju ......................................................... 107
4.2. Konfiguracija troosnog uređaja na Građevinskom fakutetu u Zagrebu 111
4.3. Određivanje minimalne i maksimalne zbijenosti pijeska ................. 117
4.4. Troosno smicanje uzoraka pijeska .................................................... 124
4.5. Rezultati smicanja pijeska u troosnom uređaju ................................... 133
4.6. Rezultati mjerenja krutosti pijeska BE metodom ............................. 151
5. ANALIZA REZULTATA I USPOREDBA KRUTOSTI TALA ................. 155
5.1. Općenito o postupku određivanja modula posmika G ....................... 155
5.2. Analiza rezultata i usporedba krutosti za pijesak ............................. 159
5.3. Usporedbe krutosti tala pri malim deformacijama ................................... 164
5.3.1. Usporedbe krutosti za pijesak .................................................... 164
5.3.2. Usporedbe krutosti za glinu ......................................................... 177
6. ZAKLJUČCI I SMJERNICE ..................................................................... 183
7. REFERENCE ........................................................................................... 185

VII
POPIS TABLICA
Tablica 3.1 Podaci sa testiranja na gumenim uzorcima za 3108 −⋅=cγ (%)
Tablica 3.2 Prosječano izmjerene brzine P i S valova u pojedinim geomedijima
Tablica 4.1 Laboratorijski podaci i rezultati mjerenja BE uzoraka pijeska 1. serije
Tablica 4.2 Laboratorijski podaci i rezultati mjerenja BE uzoraka pijeska 2. serije
Tablica 4.3 Laboratorijski podaci i rezultati mjerenja BE uzoraka pijeska 3. serije
Tablica 5.1 Prijedlozi pojedinih autora za odabir parametra elastične posmične krutosti pri vrlo malim deformacijama za pijesak

VIII
POPIS SLIKA
Slika 2.1. Opterećena prizma: (a) osno opterećnje; (b) troosno opterećenje; (c) sferno-hidrostatsko opterećenje, (Nonveiller, 1979)
Slika 2.2. Deformacije ravninski opterećene prizme: (a)shema opterećenja i deformacija; (b) deformacija elemenata dx, dz na ravnini α; (c) Mohr-ova kružnica specifičnih deformacija (Timoshenko, 1957)
Slika 2.3. Različiti modeli deformacija tla pri promjeni naprezanja
Slika 2.4. Ovisnost mehaničkih svojstava tla u odnosu na posmična naprezanja, odgovarajuća načela modeliranja i analiza odziva, (Ishihara, 1982)
Slika 3.1. Prikaz ovisnosti modula posmika G i posmične deformacije γ i približnih granica primjenjivosti važnijih metoda mjerenja deformacija (Atkinson & Sallfors, 1991)
Slika 3.2. Shematski prikaz uzorka pripremljenog za RCT pokusa pokretnom donjom pločom (Bui, 2009)
Slika 3.3. Troosna ćelija sa uzorkom i shematski prikaz za RCT pokus prema Drnevich izvedbi za uzdužno i torzijsko opterećenje (Department of Civil Engineering – Aalborg University)
Slika 3.4. Shema deformacije uzorka pri pokusu rezononantnim stupcem sa pokretnom gornjom pločom (Richter & Huber, 2004)
Slika 3.5. Aparatura troosne ćelije za pokus rezononantnim stupcem, komercijalni naziv Resonant Column Apparatus (RCA) tvrtke GDS (www.gds.com)
Slika 3.6. Prikaz zaslona software-a za RCA (Resononant Column Apparatus) tvrtke GDS pri provedbi pokusa rezononantnog stupca (www.gds.com)
Slika 3.7. Standardizirana izvedba RCT-a za torzijsko opterećenje: (a) pobuda je na bazi uzorak, a odziv se mjeri na vrhu (brzina i akceleracija), (b) pobuda je na vrhu i mjerenje odziva ja na vrhu uzorka, (Department of Civil Engineering – Aalborg University)
Slika 3.8. Shematski prikaz i dijelovi aparata za ispitivanje rezononantnim stupcem (Department of Civil Engineering – Aalborg University)
Slika 3.9. Princip određivanja modula posmika G0, pri pokusu rezononantnim stupcem (Department of Civil Engineering – Aalborg University)
Slika 3.10. Dijagrami G0 i ξ0 kao funkcija γ (Department of Civil Engineering – Aalborg University)
Slika 3.11. Princip određivanja početnog prigušenja (ξ0) za male vrijednosti logaritamskog inkrementa ∆l, slijedi da je πξ 2/0 l∆= , (Department of Civil Engineering –
Aalborg University)

IX
Slika 3.12 Tipični rezultati pokusa rezononantnim stupcem provedenih na tzv. Drnevich aparatu (Department of Civil Engineering – Aalborg University)
Slika 3.13. Skica uređaja za izravni posmik DSS (Direct Simple Shear) tipa NGI, koju je izradio Marshall Silver (Doroudian & Vučetić,1995)
Slika 3.14. Skica suvremenog uređaja za izravni posmik DSDSS (Doroudian & Vučetić,1995)
Slika 3.15. Osnovni mjeriteljski pojmovi odnosa preciznosti i točnosti
Slika 3.16. Rezultati cikličkog ispitivanja gumenog uzorka u DSDSS uređaju (Doroudian & Vučetić, 1995)
Slika 3.17. Idealizirani ciklički dijagram naprezanja i deformacija (Doroudian & Vučetić, 1995)
Slika 3.18. Bender element lijevo-integriran u bazu od pleksiglasa, desno- shematski prikaz sonde bender elementa (Chee-Ming Chan 2010)
Slika 3.19. Bender elementi: serijski i paralelni tip (Žetko i dr., 2010)
Slika 3.20. Ilustracija titranja sonde bender elementa u smjerovima širenja valova (Fioravante & Capoferri, 2001)
Slika 3.21. Shematski prikaz troosnog uređaja s bender elemenatima BE (Jovičić, 1997)
Slika 3.22. Karakteristične točke mjerenja dolaska vremena sa bender elemenatima (Jovičić, 1997)
Slika 3.23. Bender elementi tvrtke Wykheam Farrance namjenjenih mjerenju malih deformacija u troosnom aparatu i shematski prikaz (www.wfi.co.uk)
Slika 3.24. Bender elementi tvrtke GDS u troosnom uređaju Zavoda za geotehniku na Građevinskom fakultetu u Zagrebu (2006)
Slika 3.25. Bender elementi tvrtke GDS, lijevo – osni, desno –horizontalni element pričvršćen na uzorak (www.gdsinstruments.com)
Slika 3.26. Polarizacija horizontalnog bender elementa, horizontalno širenje- horizontalna polarizacija, horizontalno širenje-vertikalna polarizacija, vertikano (osno) širenje-horizontalna polarizacija (www.gdsinstruments.com)
Slika 3.27. Primjer očitanja prvog vala pri sinusnom inicijalnom valu (vrijeme nailaska prvog posmičnog vala je to (Chee-Ming Chan, 2010)
Slika 3.28. Određivanje vremena prolaska na temelju udaljenosti maksimuma inicijalnog i dobivenog vala, tpk-pk (Chee-Ming Chan, 2010)
Slika 3.29. Određivanje vremena prolaska na temelju korelacije inicijalnog i očitanog vala, tcc (Chee-Ming Chan, 2010)
Slika 3.30. Usporedba rezultata dobivenih korelacijom i očitanjem dva maksimuma (Taka i Berry, 2002)
Slika 3.31. Primjer očitanja metodom rezononance u bender elementu (Žetko i dr., 2010)
Slika 3.32. Koncept metode višestrukih refleksija (Lee & Santamarina, 2005)

X
Slika 3.33. Rezultati ispitivanja višestrukom refleksijom (a) prvi i drugi nailazak precizno su izmjereni, (b) presjecište-maksimum odgovara vremenu prolaska od 1,725 ms, (c) prvi nailazak S-vala 0,715 ms, (Lee & Santamarina, 2005)
Slika 3.34. Odnos između duljine uzorka i vremena prolaska vala (Viggiani & Atkinson, 1995)
Slika 3.35. Odnos G i p′ za uzorke ispitane metodom RCT i BE (Ferreira, Viana da Fonseka & Santos, 2006)
Slika 3.36. Odnos modula posmika G i sfernog naprezanja p′ za uzorke Dos Bay pijeska ispitane metodom BE, (Jovičić, 2006)
Slika 3.37. Tipičan zapis osciloskopa prilikom ispitivanja bender elementima, a)sa pravokutnim inicijalnim valom, b) sa sinusnim inicijalnim valom (Viggiani & Atkinson, 1995)
Slika 3.38. Efekt interferencije, vanjske electrode na oba elementa spojene sun a uzemljenje (Žetko i dr., 2010)
Slika 3.39. Rezultati mjerenja sinusnim ulaznim valovima u kaolinskoj glini (Viggiani & Atkinson, 1997)
Slika 3.40. Zapis osciloskopa pokazuje “nadvišenje” (overshooting) za pravokutni val u mekoj stijeni (veličina mreže je 5(V) za ulazni val, a 0,5 (V) za očitani val (Jovičić, Coop and Simić, 1996)
Slika 3.41. Tipičan izgled primljenog vala u bender elementu unutar “bliskog polja”, 1-prvi otklon, 2-prvi maksimum izbočine, 3-povratak na nulu nakon prvog otklona, 4- prvi glavni maksimum, (Bonal, Donohue & McNally, 2010)
Slika 3.42. Hall efekt osjetila za mjerenje osnih i radijalnih deformacija (laboratorij Zavoda za geotehniku, Građevinski fakultet Sveučilišta u Zagrebu)
Slika 3.43. Shema radijalnog Hall efekt osjetila (Piriyakula, 2006)
Slika 3.44. Shema vertikalnog osnog Hall efekt osjetila (Clayton i dr. 1989)
Slika 3.45. Shematski prikaz električne pojave “Hall efekta” (www.nktechnologies.com)
Slika 3.46. Shematski prikaz troosnog uređaja sa vertikalnm Hall efekt osjetilima (Clayton & Khatrush, 1986)
Slika 3.47. Namještanje Hall efekt osjetila na uzorak tla u laboratoriju (Građevinski fakultet u Zagrebu)
Slika 3.48. Namještanje (ugađanje) vertikalnog Hall efekt osjetila u mjerno područje (Građevinski fakultet u Zagrebu)
Slika 3.49. (a) Tipična konfiguracija Hall efekt osjetila, (b) čimbenici koji utječu na osjetljivost (Clayton & Khatrush, 1986)
Slika 3.50. Odnos modula posmika i posmične deformacije za Gault glinu (Dasari G.R., Bolton, M.R., and Ng, C.W.W.N. 1995)
Slika 3.51. Shema postavljanja vertikalnih LDT osjetila na uzorak tla (Matešić, 2002)
Slika 3.52. Shema postavljanja LDT osjetila na uzorku tla u toosnom uređaju (Wicaksono i dr., 2003)

XI
Slika 3.53. Postavljanje LDT osjetila u tri smjera na velikom šupljem cilindričnom uzorku u troosnom uređaju (HongNam i Koseki, 2003)
Slika 3.54. Primjer određivanja kalibracijskih svojstava LDT osjetila (Matešić, 2002)
Slika 3.55. Primjer određivanja stabilnosti očitanja LDT osjetila u vodi (Matešić, 2002)
Slika 3.56. Aprosimirana krivulja i mjereni podaci za uzorak P02 preko LDT osjetila (Matešić, 2002)
Slika 3.57. Primjer interpretacije rezultata mjerenja LDT osjetilom u troosnom pokusu (Magbool, Sato & Koseki, 2007):
Slika 3.58. Ilustracija konstrukcije LVDT osjetila (pretvornika)
Slika 3.59. Elektoro- fizikalne osnove LVDT osjetila
Slika 3.60. Princip rada LVDT osjetila (RDP Electronics Ltd)
Slika 3.61. Razni oblici LVDT osjetila (RDP Electronics Ltd)
Slika 3.62. Primjer radijalnog i osnih LVDT osjetila namjenjenih za valjkaste uzorke tla, izvorni naziv On-Specimen Transducers (Wykeham Farrance, 2008)
Slika 3.63. Primjer instalacije radijalnog i osnog LVDT osjetila na uzorku (GDS instruments Ltd, 2009):
Slika 3.64. Uređaj za kalibraciju LVDT osjetila prije uporabe (Wykeham Farrance Ltd)
Slika 3.65. Prikaz gibanja čestica u odnosu na smjer širenja kod uzdužnih P valova i posmičnih S valova (Braile, 2006)
Slika 3.66. Skica postavljenog profila seizmičke refrakcije
Slika 3.67. Princip mjerenja seizmičkom refrakcijom (Gazdek, 2003)
Slika 3.68. Princip mjerenja Cross-Hole metodom (Gazdek, 2003)
Slika 3.69. Shematski prikaz mjerenja, lijevo-Down-Hole, desno Up-Hole (Gazdek, 2003)
Slika 3.70. Shematizirana ilustracija mjerenja (http://geosystems.ce.gatech.edu)
Slika 3.71. Prikaz gibanja čestica u odnosu na smjer širenja kod Rayleigh-ijevih valova (Braile, 2006.)
Slika 3.72. Shematski prikaz konfiguracije mjerne opreme za SASW postupak (Kovačević, 1999.)
Slika 3.73. Prikaz rezultata mjerenja SASW metodom, (lijevo) profil posmičnih brzina vs po dubini i (desno) profil posmičnih modula, G0 po dubini (Kovačević, 1999)
Slika 4.1. Shematski prikaz (standardnog) konvencionalnog troosnog uređaja (www.gdsinstruments.com)
Slika 4.2. Prikaz „pravog” troosnog uređaja (GDSTTA) True Triaxial Apparatus (www.gdsinstruments.com)
Slika 4.3. Shematski prikaz modularno automatiziranog konvencionalnog troosnog uređaja (www.controls.it)
Slika 4.4. Slika nove GDS „pomične“ troosne ćelije za uzorke promjera 35/50 mm i kapaciteta 2 Mpa (Građevinski fakultet u Zagrebu)

XII
Slika 4.5. GDS digitalna crpka (Digital controller 200cc) za nametanje tlaka u troosnom uređaju (Građevinski fakultet u Zagrebu)
Slika 4.6. Konfiguracija suvremenog troosnog uređaja s novom GDS ćelijom u laboratoriju Zavoda za geotehniku na Građevinskom fakultetu u Zagrebu
Slika 4.7. Granulometrički dijagram Savskog pijeska
Slika 4.8. Sipanje pijeska u cilindar kalupa
Slika 4.9. Pijesak u kalupu prije i poslije poravnanja s vrhom cilindra kalupa
Slika 4.10. Vibriranje kalupa s pijeskom i utegom
Slika 4.11. Vaganje kalupa sa pijeskom
Slika 4.12. Međusobni odnosi različitih mjera zbijenosti nasutog i zbijenog tla (Szavits-Nossan, A. 2009)
Slika 4.13. Laboratorijski pribor, iscrtavanje gumene membrane i provjera vododrživosti
Slika 4.14. Vlaženje uzorka destiliranom vodom (oko 5 % ) i homogeniziranje u PVC vrećicama
Slika 4.15. Postolje kalupa sa bender elementom (BE) i čeličnim cilindričnim kalupom sa ljevkom
Slika 4.16. Postavljanje kalupa batića i zbijanje pijeska kod izrade uzorka
Slika 4.17. Postavljanje gornjeg BE i skidanje čeličnog cilindričnog kalupa
Slika 4.18. Postavljanje Hall efekt osjetila na uzorak pijeska
Slika 4.19. Karakterističan zaslon kod mjerenja bender elementima (BE) sa software-om GDSLAB v 2.1.0.
Slika 4.20. Uzorak pijeska u troosnom pokusu sa BE i Hall efekt osjetilima (Građevinski fakultet u Zagrebu)
Slika 4.21. Trag naprezanja q-p′ i q-ε1 dijagram za uzorak pijeska S 1_50
Slika 4.22. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 1_50, pri malim deforamcijama mjerenim lokalno sa Hall efekt osjetilima
Slika 4.23. Trag naprezanja q-p′ i q-ε1 dijagram za uzorak pijeska S 1_100
Slika 4.24. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 1_100, pri malim deforamcijama mjerenim lokalno sa Hall efekt osjetilima
Slika 4.25. Trag naprezanja q-p′ i q-ε1 dijagram za uzorak pijeska S 1_200
Slika 4.26. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 1_200, pri malim deforamcijama mjerenim lokalno sa Hall efekt osjetilima
Slika 4.27. Trag naprezanja q-p′ i q-ε1 dijagram za uzorak pijeska S 2_50
Slika 4.28. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 2_50, pri malim deforamcijama mjerenim lokalno sa Hall efekt osjetilima
Slika 4.29. Trag naprezanja q-p′ i q-ε1 dijagram za uzorak pijeska S 2_100

XIII
Slika 4.30. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 2_100, pri malim deforamcijama mjerenim lokalno sa Hall efekt osjetilima
Slika 4.31. Trag naprezanja q-p′ i q-ε1 dijagram za uzorak pijeska S 2_200
Slika 4.32. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 2_200, pri malim deforamcijama mjerenim lokalno sa Hall efekt osjetilima
Slika 4.33. Trag naprezanja q-p′ i q-ε1 dijagram za uzorak pijeska S 3_50
Slika 4.34. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 3_50, pri malim deforamcijama mjerenim lokalno sa Hall efekt osjetilima
Slika 4.35. Trag naprezanja q-p′ i q-ε1 dijagram za uzorak pijeska S 3_100
Slika 4.36. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 3_100, pri malim deforamcijama mjerenim lokalno sa Hall efekt osjetilima
Slika 4.37. Trag naprezanja q-p′ i q-ε1 dijagram za uzorak pijeska S 3_200
Slika 4.38. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 1_200, pri malim deforamcijama mjerenim lokalno sa Hall efekt osjetilima
Slika 5.1. Opći prikaz definiranja modula posmika (G0 i Gs i Gt ) iz odnosa τ - γ
Slika 5.2. Odnos modula E u dreniranoj troosnoj kompresiji na razini vertikalnih deformacija ε1 za Savski pijesak (S1). Za usporedbu krutosti, vrijednosti E na razini deformacija od 10-5 % su preračunate preko modula G dobivenog BE metodom
Slika 5.3. Odnos modula E u dreniranoj troosnoj kompresiji na razini vertikalnih deformacija ε1 za Savski pijesak (S2). Za usporedbu krutosti, vrijednosti E na razini deformacija od 10-5 % su preračunate preko modula G dobivenog BE metodom
Slika 5.4. Odnos modula E u dreniranoj troosnoj kompresiji na razini vertikalnih deformacija ε1 za Savski pijesak (S3). Za usporedbu krutosti, vrijednosti E na razini deformacija od 10-5 % su preračunate preko modula G dobivenog BE metodom
Slika 5.5. Odnos G - p′ za Savski pijesak (G je dobiven BE metodom)
Slika 5.6. Opći prikaz mehaničkog ponašanja pijeska pri troosnom CID pokusu smicanju ovisno o zbijenosti uzorka
Slika 5.7. Utjecaj zbijenosti i naprezanja konsolidacije p′ na G0 kod CIU pokusa izvedenih na pijesku (Matešić, 2002)
Slika 5.8. Dijagrami G - γ, rezultata ispitivanja prema nekim autorima
Slika 5.9. Ponašanje tla pri smicanju u ovisnosti o indeksu plastičnosti prema (Vučetić i Dobry, 1991)
Slika 5.10. Ovisnost posmične krutosti G tijekom drenirane troosne kompresije na nivou posmičnih deformacija εq i naprezanja p'0 za muljeviti pijesak Boštanj. Za usporedbu, vrijednosti G0 su dobivene BE metodom i prikazane na slici na razini deformacija 0.0001 % (Vilhar and Jovičić, 2009)

XIV
Slika 5.11. Posmicni modul ni G0 pri vrlo malim deformacijama i srednjem efektivnom naprezanju od 0.1 MPa. (Sokolić, 2010)
Slika 5.12. Usporedbe Normaliziranog modula posmika u kompresiji i extenziji (Y. Wang and C.W.W., 2005)
Slika 5.13. Young-ov modul kao rezultat cikličkih opterećenja (Wicaksono i dr., 2008)
Slika 5.14. Tipični rezultati za Toyoura pijesak u suhom i zasićenom stanju (Wicaksono i dr., 2008)
Slika 5.15. Efekt „bedding“ pogreške u BE metodi (Wicaksono i dr. 2009)
Slika 5.16. Usporedba modula GD i Gsta za Toyoura pijesak i Hime šljunak (Wicaksono i dr. 2009)
Slika 5.17. Normalizirani modul posmika u korelaciji sa koeficjentom pora za razna tla (Bui M.T., 2009)
Slika 5.18. Utjecaj zbijenosti, prethodnog opterećenja i naprezanja konsolidacije na G0 kod pokusa izvedenih na glini (Matešić, 2002)
Slika 5.19. Dijagrami G - γ, rezultata ispitivanja prema nekim autorima
Slika 5.20. Naponsko deformacijski odnos za prirodno mekanu glinu (Smitt, 1992., pruzeto iz Clayton & Heymann, 2001)
Slika 5.21. Usporedba krutosti tla za tri različite vrste tla; Londonsku glinu, Bothkennarsku glinu i poroznu kredu (Clayton & Heymann, 2001)
Slika 5.22. Normalizirana krutost na 0,001 % deformacija za Londonsku glinu, Bothkennarsku glinu i poroznu kredu (Clayton & Heymann, 2001.)
Slika 5.23. Usporedba krutosti tla data preko odnosa Gmax–e (Bui M. T., 2009)
XV
KRATICE
BE Bender elementi (izvorni naziv Bender Elements)
HALL effect Osjetilo za izravno mjerenje deformacija na uzorku (izvorni naziv Hall
Effect Local Strain Transducers)
DSDSS Pokus izravnog posmika dvostukog uzorka (izvorni naziv Double Specimen
Direct Simple Shere Test)
CIU Izotropno konsolidirani nedrenirani pokus
CID Izotropno konsolidairani drenirani pokus
CU Konsolidirani nedrenirani pokus
CD Konsolidirani drenirani pokus
UU Nedrenirani nekonsolidirani pokus
LDT Osjetilo za izravno mjerenje deformacija na uzorku (izvorni naziv: Local
Deformation Transducer)
LVDT Osjetilo za izravno mjerenje deformacija na uzorku (izvorni naziv: Linear
Variable Differential Transducer)
RCT Pokus rezonantnim stupcem (izvorni naziv Resonant Column Test)
RCA Uređaj za pokus rezonantnim stupcem (izvorni naziv Resonant Column
Aparat)
SASW Sprektralna analiza površinskih valova (izvorni naziv Spectral Analysis of
Surface Wawes)

XVI
SIMBOLI
a’ adhezija za efektivna naprezanja, a’ = c’ / tg φ’ ,
A trenutna poprečna površina uzorka, A =A0+∆A
A0 poprečna površina uzorka na početku ispitivanja,
∆A promjena poprečne površine u odnosu na A0,
B B parametar,
c kohezija za totalna naprezanja,
c’ kohezija za efektivna naprezanja,
D trenutni promjer uzorka, D =D0+∆D
D0 promjer uzorka na početku ispitivanja,
∆D promjena promjera uzorka u odnosu na D0,
e koeficijent pora,
e0 početni koeficijent pora,
emin minimalan koeficijent pora,
emax maksimalan koeficijent pora,
G0 početni ili elastični sekantni posmični modul,
GE elastični sekantni posmični modul ovisan o tragu naprezanja,
Gr referentni elastični modul posmika pri referentnom izotropnom naprezanju, p’= p’r i q=0,
Gs sekantni posmični modul,
h trenutna visina uzorka, h =h0+∆h
h0 visina uzorka na početku ispitivanja,
∆h promjena visine uzorka u odnosu na h0,
ID indeks gustoće,
m modulski eksponent,
Pi granična pogreška i-te izravno mjerene veličine,
p totalno sferno naprezanje,
p’ efektivno sferno naprezanje,
p’c prethodno efektivno sferno naprezanje,
p’p efektivno sferno naprezanje konsolidacije,

XVII
p’r referentno efektivno sferno naprezanje,
RV rezolucijska vrijednost,
q devijator naprezanja σ1-σ3,
u porni tlak,
∆u promjena pornog tlaka,
VS brzina posmičnih valova,
ρ gustoća tla,
ρd min minimalna gustoća tla,
ρd max maksimalna gustoća tla,
VP brzina uzdužnih valova,
W devijatorska vertikalna osna sila,
x = γ / γR normalizirana posmična deformacija,
y = z * x normalizirani posmična naprezanja,
z =G/GE normalizirani sekantni modul posmika,
εv relativna volumenska deformacija,
ε1 relativna vertikalna deformacija,
ε2 , ε3 relativne horizontalne deformacije,
φ kut unutarnjeg trenja određene za totalna naprezanja,
φ’ kut unutarnjeg trenja određene za efektivna naprezanja,
γs specifična težina,
γ posmična deformacija,
γR referentna posmična deformacija,
ν Poissonov broj,
σ totalno normalno naprezanje,
σ’ efektivno normalno naprezanje,
σ1 normalno osno naprezanje,
σ3 bočno normalno naprezanje ili ćelijski tlak,
τ posmično naprezanje,
τf posmično naprezanje pri slomu, posmična čvrstoća,

1. Uvod 1
1. UVOD
1.1. Predmet i cilj rada
Procjenjivanju, odnosno određivanju vrijednosti krutosti tla pri malim
deformacijama, u zadnje vrijeme se sve više pridaje značajna pozornost. Jedan razlog je
što se na taj način mogu dokazati ili pak opovrgnuti neki procesi ili tvrdnje date u
dosadašnjoj teoriji kontinuma. Drugi razlog je sve bolja tehnička opremljenost
(digitalizacija opreme, preciznost mjerenja, automatizacija upravaljanja,...) mjerne
opreme, kako u laboratoriju tako i na terenu kojom se izvode sama mjerenja. Međutim,
vrlo važan razlog određivanja krutosti tla pri malim deformacijama leži u tome što se u
praksi pojavljuju značajna odstupanja izmjerenih veličina pomaka (recimo slijeganja tla
ispod temelja ili pomaka armiranobetonskih dijafragmi, potpornih zidova i sl.) od onih
projektom predviđenih. Razlog može biti višeznačan, recimo zbog nepouzdanog
određivanja parametara stišlivosti, ili pak zbog konzervativnog pristupa projektiranja
koji se temelje na mehanici kontinuuma (u praksi se najčešće to sužava na primjenu
teorije elastičnosti) koja zahtijeva poznavanje parametara stišljivosti tla u dovoljno
širokoj okolini oko mjesta djelovanja opterećenja. Međutim postupno razmatrajući svi
razlozi se mogu svesti na poznatu činjenicu da deformacije ovise o krutosti tla. No bolje
rečeno deformacija ovisi o veličini krutosti tla. Stoga je jako važno odrediti veličinu
krutosti tla u procesu deformiranja tla od njegovog početka do sloma. Primjenom teorije
elastičnosti moglo se procjeniti da krutost tla nije linearna za promjene naprezanja, već
da s porastom deformacija ona opada i obrnuto. Međutim potrebno je razviti tehnike i
metode kojima bi se ova teorija u potpunosti potkrijepila. Stoga je postupak određivanja
krutosti tla jako važan jer o ispravnosti postupka ovise i rezultati. Naime krutost tla
određena konvencionalnim (standardnim) geotehničkim postupcima redovito daje
prevelike pomake u odnosu na ona izmjerena na terenu, osobito za kruća tla. Razvoj
novih laboratorijskih uređaja za precizno mjerenje deformacija tla na uzorku tla,
promjenio je neke donedavne teorije i pretpostavke o krutosti tla.
Naime, dugo se smatralo da se (kruta tla) krute ili prekonsolidirane gline ponašaju
po linearno elastičnom modelu (kao linearno elastični material) ili barem da se dodatna
naprezanja u takvim materijalima ponašaju po pravilima linearne teorije elastičnosti.

1. Uvod 2
Neki istraživači su smatrali da je pristup ovoj teoriji ispravan, a temeljili su ga na nizu
istraživanja ponašanja prekonsolidiranih glina u laboratorijskim uređajima kakav je na
primjer troosni uređaj. Drugi istraživači su podržavali ovu teoriju temeljenu na
spoznajama da vertikalna dodatna naprezanja slabo ovise o naponsko-deformacijskom
odnosu. Iz toga je proizlazilo da pouzdanost (točnost) predviđanja slijeganja temeljnog
tla prvenstveno ovisi o pouzdanosti (točnosti) utvrđenih modula elastičnosti krutih glina
i njihovoj promjeni s dubinom. Međutim, ubrzo je ustanovljeno da je teško pouzdano
izmjeriti sve ove parametre elastičnosti.
Konvencionalnim (standardnim) laboratorijskim pokusima, redovito su se dobivale
znatno manje krutosti tla u odnosu na krutosti dobivene povratnim analizama iz
rezultata opažanja (monitoringa) slijeganja. Osim za slučaj plitkih temelja, ovi su
problemi uočeni i za slučajeve građevnih jama i savitljivih potpornih konstrukcija.
Rješenje ovih problema naziralo se na in situ ispitivanjima tla geofizičkim metodama.
Međutim dugo se smatralo da se parametri tla određeni geofizičkim metodama ne mogu
pouzdano primjeniti za probleme u statičkim uvjetima naprezanja. Stoga se određivanje
veličine krutosti tla in situ geofizičkim metodama nije mogla pouzdano usporediti sa
rezultatima dobiveni konvencionalnim ispitivanjima u laboratoriju, recimo troosnom
uređaju i sl. Premala krutost laboratorijskih uzoraka krutih glina pripisivala se njihovoj
raspucalosti i poremećenju tokom vađenja iz tla i ugradnje u odgovarajući laboratorijski
uređaj. No kasnije će se pokazati jedinstvenost u određivnju vrijednosti krutosti tla, bilo
monotonim smicanjima, bilo geofizičkim metodama.
Ponašanje zrnatih materijala, recimo pijeska, u naponsko deformacijskom odnosu je
je redovito nelinearno. Ta nelinearnost ponašanja zrnatih materijala pripisuje se
ovisnosti krutosti pijeska i čvrstoće o stanju i tragu naprezanja, gustoći, smjeru i brzini
deformacije te pojavama kao što su histereza i prigušenje pri cikličkom opterećenju
(Mitchell & Soga 2005, Jefferies & Been 2006.). Dobro je poznato da deformacije tla
mogu biti volumske (promjena veličine volumena) i distorzione (promjena oblika).
Međutim, svojstvo promjene volumena prilikom smicanja izraženo je čak i u uvjetima
konstantnog izotropnog naprezanja. Ta pojava naziva se dilatacija i jedan je od glavnih
uzroka promjene čvrstoće i krutosti pijeska tokom smicanja (Reynolds, 1885). Nadalje,
Casagrande (1936) pokazuje da promjena volumena pijeska pri smicanju može biti

1. Uvod 3
pozitivna, neutralna ili negativna, ovisna o njegovoj zbijenosti, te uvodi pojam kritičnog
koeficijenta pora pri kojem nema promjene volumena tijekom monotonog smicanja.
Razvojem precizne mjerne tehnike u znanosti, koncem sedamdesetih i početkom
osamdesetih godina, počeo je i razvoj primjene istih u geotehničkim laboratorijima.
Prvenstvena namjena takvih uređaja je odrediti male i vrlo male deformacije pri
smicanju uzoraka tla bilo u cikličkim, bilo u monotonim uvjetima smicanja. Tako se
razvila jedna grupa uređaja i osjetila za mjerenje malih deformacija na površini uzorka
tla, prvenstveno pri uporabi na troosnim pokusima. U tu grupu spadaju osjetila pod
uobičajenim nazivom kao što su Hall-effect osjetila (Hall Efect Local Strain
Transducer), LDT osjetilo (Local Deformation Transducer), LVDT osjetilo (Linear
Variable Differential Transducer), te BE osjetila (Bender Elements), koji su opisani u
raznim radovima autora (na pr.: Burland i Symes 1982, Jardine, Symes i Burland 1984,
Clayton i Khatrush 1986, Goto i dr., 1991, Jovičić 1997, Clayton i Haymann 2001,
Matešić 2002, Bui 2009), s mogućnošću mjerenja relativnih deformacija do 0.0001%
pa i manjih. Rezultati pokusa, uz korištenje navedenih uređaja, bacili su ozbiljnu
sumnju na tezu o linearno elastičnom ponašanju krutih glina. Oni su pokazali dvije
važne novosti. Prvo, u području malih deformacija ponašanje tla, pa i krutih glina,
izrazito je nelinearno, a ne linearno kako se do tada mislilo. Na primjer, posmična
krutost tla u području posmičnih deformacija od 0,01% do 1% pada s porastom
deformacija i preko deset puta (Jardine, 1984). Drugo, posmična je krutost tla pri
malim i vrlo malim deformacijama izrazito puno puta veća od krutosti pri većim
deformacijama. Naime, tehnika mjerenja mjerenje malih i vrlo malih deformacija
izravno na uzorku daje znanto kvalitetnije rezultate u odnosu na konvencionalne metode
mjerenja preko postolja ili kape uzorka.
Razvoj tehnologije mjerenja malih i vrlo malih deformacija na površini uzoraka tla
doveo je do novih spoznaja o ponašanju tla pri monotonom i cikličkom smicanju.
Paralelna istraživanja pomno opažanih mjerenja deformacija tla pri raznim
geotehničkim zahvatima na terenu potvrdila su razna laboratorijska istraživanja (na pr.:
Martin, McCoy i Hunt 1986, Burland 1989, Simpson 1992, Clayton i Haymann 2001,
Matešić 2002, Buieles i dr. 2008, Bui 2009). Čak ima naznaka da su ovisnosti
posmične krutosti o relativnoj posmičnoj deformaciji dobivene opisanom tehnologijom

1. Uvod 4
za monotona (statička) opterećenja sukladna već ranije poznatim ovisnostima dobivenih
pri dinamičkim laboratorijskim pokusima, kao što je pokus rezonantnim stupcem
(Atkinson i Sallfors 1991, Cascante i dr. 2003, Youn i dr. 2008). Naime, dugo se
smatralo da su rezultati dinamičkih pokusa neprimjereni za analize sa statičkim
opterećenjem. Tako je nova tehnologija mjerenja malih deformacija u laboratoriju
pomogla smanjenju razlike u, do nedavno, različitom poimanju statičke i dinamičke
posmične krutosti tla.
Cilj istraživanja predstavljenog ovim radom je prezentiranje rezultata mjerenja
malih deformacija i krutosti tla na pijesku, te usporedba krutosti drugih tala po
usporedivim kriterijima. Također cilj ovoga rada je potvrditi pouzdanost funkcioniranja
novog redizajniranog i obnovljenog troosnog uređaja sa osjetilima najnovije generacije
Hall Effect Local Strain Tansducers i Bender elementima (BE). Pored prethodnog cilj je
pokazati usporedbu rezultata istraživanja krutosti tla sa rezultatima dosadašnjih
mjerenja drugih autora objavljenih u literaturi kod nas i u svijetu, te utvrditi trendove
ponašanja pojedine vrste tla koji se mogu uočiti na temelju rezultata istraživanja.

1. Uvod 5
1.2. Prikaz rada
Metode mjerenja malih deformacija, provedena istraživanja na pijesku, rezultati i
analize istih, te usporedba krutosti tala, prikazni su kroz sljedeća poglavlja:
• Poglavlje 2 prikazuje osonovne pojmove elastičnosti i krutosti tla. Opisuju se
osnovne elastične konstante u mehanici tla, odnosno mehanici materijala, te
definira pojam krutosti tla kroz prizmu malih deformacija. U ovom poglavlju dat
je osvrt na razvoj mjerne tehnike kao i objavu saznanjna o novim spoznajama
pri mjerenju malih deformacija kroz povijest. Osobito se daje naglasak na
mjerna osjetila koja su uporabljivananja kod troosnih pokusa, njihov povjesni i
tehnološki razvoj, ograničenja i poteškoće pri implementaciji u laboratorijima.
• Poglavlje 3 prikazuje opis postojećih tehnika, odnosno metoda i postupaka
mjerenja malih i vrlo malih deformacija na uzorku s osvrtom na određivanje
krutosti tla. Tako se navodi podjela mjerenja malih deformacija s obzirom na
mjesto mjernja, na laboratorijska i in situ mjerenja malih deformacija. Slijedom
navedenoga, u poglavlju se navodi postupak mjerenja malih deformacija kroz
pokuse rezononantnog stupca (RCT), zatim Double Specimen Direct Shere
Simple (DSDSS), pokus bender elementima (BE), pa mjerenje deformacija
izravno na uzorku mjernim osjetilima kao što su Hall Efect Local Strain
Transducer, LDT i LVDT. U poglavlju je opisan detaljan opis poteškoća koje se
javljaju kod raznih postupaka očitanja vrijednosti brzine širenja posmičnih
valova kroz uzorak. Tu se misli na postupke pokusa rezononantnim stupcem
(RCT) i bender elementima (BE). Također ilustriran je primjer rasapa rezultata
prilikom pogrešnog očitanja srodnih mjernih veličina brzina posmičnih valova
kod bender elemenata te usporedba krutosti tla određena pojedinim metodama
(RCT i BE)
• Poglavlje 4 prikazuje opis ispitivanja pijeska u troosnom uređaju. Na početku
poglavlja dat je opis troosnog uređaja najmenjen mjerenju malih deformacija
općenito dok je u nastavku opisana konfiguracija troosnog uređaja za mjerenje

1. Uvod 6
malih deformacija (sa osjetilima i opremom) u laboratoriju Zavoda za
Geotehniku pri Građevinskom fakultetu Sveučilišta u Zagrebu. Za mjerenje
malih deformacija uporabljivano je Hall efekt osjetilo (Hall Efect Local Strain
Transducer) te bender elementi. Na temelju rezultata jednih i drugi određivani su
početni moduli posmika. U nastavku poglavlja prikazuje se ispitivanje
maksimalne i minimalne zbijenosti pijeska, porjeklom iz rijeke Save s lokaliteta
u okolici grada Zagreba, te priprema uzorka, smicanje i rezultati smicanja. U
poglavlju se daje prikaz naponsko deformacijskog odnosa pojedinih uzoraka pri
dreniranom ispitivanju u troosnom uređaju. Posebno se navodi vrijednost
određivanja mjerenja krutosti metodom bender elementima i mjerenja malih
deformacija preko Hallefekt osjetila izravno na uzorku.
• Poglavlje 5 prikazuje analizu rezultata usporedbe krutosti za pijesak na temelju
rezultata pokusa i objavljenih rezultata drugih autora. Daje se analiza usporedbe
krutosti tla objavljenih rezultata posebno za pijeske i posebno za gline. U
poglavlju se daje usporedba kroz odnose i varijacije pojedinih parametara
krutosti, najčešće početnih modula posmika dobivenih mjerenjima BE
metodom. Takoder, dat je osvrt na trendove u intrepretacijama pojedinih autora.
• Poglavlje 6 odnosi se na glavne zaključke rada, znanstveno istraživački
doprinos rada te smjernice za daljnja istraživanja.

2. Osnovni pojmovi elastičnosti i krutosti tla 7
2. OSNOVNI POJMOVI ELASTIČNOSTI I KRUTOSTI TLA
2.1. Općenito o tlu i njegovim karakteristikama
Kako je osnovna karakteristika tla njegova postojanost u prirodnom obliku, za
razliku od drugih građevinskih materijala koje spravljamo po unaprijed određenoj
recepturi (npr. beton, čelik i sl.), tako ta karakteristika predstavlja najveći izazov
(problem) u određivanju, odnosno opisivanju ponašanja tla u određenim uvjetima
eksploatacije i nakon nje.
Međutim, nesmjemo iz vida gubiti činjenicu da svaka konstruktivna građevina „leži“
na nekim temeljima, bilo pritkim, bilo dubokim, monolitnim, zabijenim, drvenim,
betonskim, čeličnim, ...itd. Temelji su dio građevine kojim se opterećenja iz
kontrolirane građevine prenose u prirodnu sredinu, tlo, na način da građevina bude
trajno uporabljiva. Stoga je temelj sastavni dio svake građevine, a oblik temelja i dubina
temeljenja ovise ovrsti građevine i osobinama tla ispod nje. Temelj nikad nije sam sebi
svrha. Međutim svi ti temelji se nalaze u ili na tlu. Stoga je izučavanje ponašanja tla kao
građevnog medija postalo sastavni dio ozbiljne stručne građevinske prakse, osobito u
proteklih 80 godina, kada se geotehnička saznanja prihvaćaju kao znanstvena grana
jedanako konkurentna ostalim tehničkim (konstruktorskim) granama. Također, iz prakse
se zna da uporabni vijek građevine u konstruktorskom smislu, upravo ovisi o kvaliteti
izvedbe, odnosno vijeku trajanja temelja. Stoga se u tom smislu slobodno može reći da:
„Vijek građevine upravo ovisi o vijeku temelja“. Međutim da bi bolje razumjeli
ponašanje temelja potrebno je poznavati naponsko deformacijske odnose tla ispod i oko
temelja.
Prognoza ponašanja tla, u smislu procjene odnosa deformacija i naprezanja tla za
promjenu polja naprezanja ili deformacija, predstavlja osnovni zadatak u projektiranju
svih geomehaničkih zahvata. Brojni su primjeri neuspjelih građevina čije ponašanje ne
odgovara predviđenome zato što nisu ispravno proračunati utjecaji opterećenja na tlo.
Tako su moguće pretjerane deformacije i time uvjetovana mehanička oštećenja, kao što
su pukotine i potpuni slomovi nekih dijelova objekta, koji tako postaje djelomično ili

2. Osnovni pojmovi elastičnosti i krutosti tla 8
potpuno neupotrebljiv. To mogu biti neočekivana sljeganja velikog inteziteta ili
neujednačene veličine (diferencijalno sljeganje) zbog čega se građevina naginje i
nemože valjano funkcionirati. Na kraju, deformacije tla oko građevine i ispod nje mogu
postati tako velike da se i sama građevina prevrne (uruši). Stoga je osnovni zadatak
mehanike tla da omogući predviđanje deformacija i veličine graničnih opterećenja uz
koje nastaje (eventualni) slom tla ispod objekta. Za takvo što potrebno je odrediti
funkcionalne veze između naprezanja i deformacija. Međutim, tlo je takav materijal kod
kojeg su te funkcionalne veze vrlo složene i što još više čini problem težim, različite od
vrste do vrste tla. S druge strane suvremena geotehnička praksa zahtijeva što bolju
procjenu deformacija u tlu koje nastaju različitim zahvatima, a posebno što bolju
procjenu sljeganja tla kao problema mogućih, obično katastrofalnih deformacija.
Za pouzdano poznavanje ponašanja tla potrebno je poznavati osnovne parametre
(karakteristike) tla s kojima će se ući u proračun za odabrani model. Jedan od važnih
parametara je i krutost tla. Obično se krutost tla izražava preko modula posmika G,
suprotno preko modula stišljivosti Mv i preko Young-ovog modula elastičnosti E. U
određivanju krutosti i deformacija tla (pa tako i naprezanja), geotehnička praksa razvila
je niz laboratorijskih i terenskih, direktnih i indirektnih postupaka kojima se određuju
određeni aspekti mehaničkog ponašanja tla primjereni pojedinim vrstama problema.
Pomaci (deformacije) su vidljiva fizikalna veličina koju jedino možemo izmjeriti na
uzorku ili tlu pa preko raznih direktnih ili indirektnih "pretvarača" dobiveni pomak
pretvoriti u naprezanje. Stoga je John Burland je 1967. godine u zaglavlju svoga
doktorata napisao: "Naprezanje je filizofski koncept, a deformacija je fizikalna realnost"
(Simpson 1992).

2. Osnovni pojmovi elastičnosti i krutosti tla 9
2.2. Definiranje osnovnih elastičnih konstanti
Poznato je iz mehanike kontimuma da se deformacija i naprezanje u jednoj točki
materijala, svaki za sebe, mogu opisati skupom od šest skalarnih veličina koje čine
komponente tenzora tog naprezanja ili deformacija u nekom koordinatnom sustavu. Te
komponente pišu se obično u obliku matrica. Funkcionalna veza između naprezanja i
deformacija opisuje ponašanje tog materijala. Takve funkcionalne veze mogu biti još
ovisne o vremenu, temperaturi itd.
Ukoliko promotrimo prizmu od elastičnog materijala, (Slika 2.1.) elastične
karakteristike materijala definirane su modulom elastičnosti E i Poisson-ovim
koeficijentom poprečne kontrakcije ν, (skraćeno Poisson-ov broj). Kada je prizma
opterećena glavnim naprezanjem σ1 u smjeru dulje osi, nastaju deformacije u
uzdužnom, odnosno osnom ε1, i u poprečnom smijeru ε2, definirane sa:
εσ
εν σ
11
21= = −
⋅
E E, (2.1)
Slika 2.1. Opterećena prizma: (a) osno opterećnje; (b) troosno opterećenje; (c) sferno-hidrostatsko opterećenje, (Nonveiller, 1979)

2. Osnovni pojmovi elastičnosti i krutosti tla 10
Ako je prizma opterećenja na svim plohama sa različitim glavnim naprezanjima
σ1>σ2>σ3, pojavit će se deformacije koje se mogu izračunati superpozicijom izraza (2.1)
u sva tri smjera, iz čega dobivamo izraze teorije elastičnosti:
( )[ ]
( )[ ]
( )[ ]1233
3122
3211
1
1
1
σσνσε
σσνσε
σσνσε
+−=
+−=
+−=
E
E
E
(2.2)
Sfernim naprezanjem nazivamo stanje naprezanja pri kojemu su sva tri glavna
naprezanja jednaka: σh = σ1 = σ2 = σ3. Tada su i deformacije u sva tri smjera jednake,
pa iz jednadžbe (2.2) može se izračunati da je horizontalna deformacija jednaka:
ενσh h
E=
−1 2 (2.3)
Promjena duljine stranice prizme izaziva i promjene volumena. Početni volumen
neopterećene prizme je V0 = B x D x L, a volumen nakon opterećenja obilježavat ćemo
sa V. Uvrštavanjem vrijednosti specifičnih deformacija u tri smjera proizlazi da je
volumen:
( ) ( ) ( ) ( ) ( ) ( ) 0321321 111111 VBDLV ⋅−⋅−⋅−=⋅−⋅⋅−⋅⋅−= εεεεεε (2.4)
Specifična promjena volumena izražava se sa:
V
VV −= 0θ (2.5)
pa kad se uvrsti izraz (2.4) ta promjena će biti, za male linearne deformacije:
321 εεεθ ++= (2.6)
a sferno opterećenje je:
( )KE
hh
σσ
νθ =⋅
−⋅=
213 (2.7)

2. Osnovni pojmovi elastičnosti i krutosti tla 11
Gdje modul ( )ν213 −⋅
=E
K nazivamo sferni modul. (2.8)
U elementu podvrgnutome različitim glavnim naprezanjima u tri smjera osim osnih
deformacija nastaju i posmične deformacije zbog djelovanja posmičnih naprezanja na
raznim plohama. Ukoliko razmotrimo te deformacije za ravninski slučaj kada je ε2 = 0 ,
imamo odnos između specifičnih deformacija u smjerovima glavnih naprezanja i u
ravnini nagnutoj pod kutom α prema ravnini većega glavnog naprezanja za element dx,
dz, što je prikazano na slici 2.2.(b) (Timoshenko, S. 1957). S oznakama na slici 2.2.
dobvamo:
( )
( ) ααεεγ
αεεεε
cossin2
cos
31
2313
⋅−=
−+=
(2.9)
što je također jednadžba kružnice promjera 31 εε − sa središtem u )(2
131 εε + kako je
prikazano na Slici 2.2.
Slika 2.2. Deformacije ravninski opterećene prizme: (a)shema opterećenja i deformacija; (b) deformacija elemenata dx, dz na ravnini αααα; (c) Mohr-ova kružnica
specifičnih deformacija (Timoshenko, 1957)

2. Osnovni pojmovi elastičnosti i krutosti tla 12
Srednje glavno naprezanje za ravninsko stanje izračunat će se iz jednadžbe (2.2) po
izrazu:
( )312 σσνσ +⋅= (2.10)
Ako to isto napravimo za ostale dvije jednadžbe, dobvamo specifične deformacije
izražene glavnim naprezanjima:
( ) ( )[ ]
( ) ( )[ ]21
233
23
211
11
11
ννσνσε
ννσνσε
−−−=
−−−=
E
E (2.11)
Uvrstimo li u prethodni izraz u (2.9), dobvamo posmičnu deformaciju izraženu glavnim
naprezanjima:
( )[ ]αασσνγ
cossin1
2 31 ⋅⋅−+
=E
(2.12)
a pošto je ( ) αασστ cossin31 ⋅−= , proizlazi da je posmična deformacija:
( )GE
ττ
νγ =
+⋅=
12 (2.13)
Gdje modul ( )ν+⋅
=12
EG nazivamo modul posmika (2.14)
Iz ovog izvoda zapažamo da deformacije elastičnih tijela u općem slučaju
opterećenja možemo definirati tenzorom naprezanja i dvijema neovisnim elastičnim
konstantama: modulom elastičnosti E i Poisson-ovim koeficijentom ν ili sfernim
modulom K i modulom posmika G. Elastične konstante materijala mogu se izračunati iz
izmjerenih deformacija uzorka zbog djelovanja poznatog tenzora naprezanja.
Navedena teorija elastičnosti je osnova za promatranje mehaničkog ponašanja tla u
naponsko deformacijskim odosima. Međutim stvarno tlo bitno se razlikuje od modela
elastičnog tijela, pa stoga ove konstante mogu poslužiti samo kao gruba orijentacija.

2. Osnovni pojmovi elastičnosti i krutosti tla 13
Na Slici 2.3. dat je prikaz odnosa između naprezanja i deformacija za različite
modele ponašanja materijala.
Slika 2.3. Različiti modeli deformacija tla pri promjeni naprezanja
Prikaz elastičnih konstant po teoriji elastičnosti:
Naziv kostante Izraz
Definicija
Modul elastičnosti
E =σ
ε1
1
Odnos naprezanja i relativne deformacije mjerene u pravcu djelovanja sile kada je uzorak tla opterećen tlačno (kompresijski)
Modul posmika G xz
xz
=τ
γ
Odnos posmičnog naprezanja i relativne posmične deformacije
Poisson-ov broj
νε
ε= 3
1
Odnos lateralne (bočne) i osne relativne deformacije, koje su posljedica tlačnog naprezanja na uzorku
Sferni modul K =⋅
σ
ε0
13
Odnos izotropnog naprezanja na uzorku i relativne volumske deformacije
Dovoljno je odrediti dvije konstante (npr. pokusima u laboratoriju), pa se ostale dvije
mogu izračunati iz međusobnih odnosa, npr.:
2. Osnovni pojmovi elastičnosti i krutosti tla 14
)21(39)1(2
νν
−⋅=−
⋅=
+⋅= K
EK
KEEG (2.15)
)21(3
)1(2
)3(3
3
)21(3 ν
ν
ν −⋅
+⋅=
−⋅=
−⋅=
G
EG
GEK (2.16)
)3(2
23
6
3
2
2
GK
GK
K
EK
G
GE
+⋅
−=
−=
+=ν (2.17)
)1(2)(3
9)21(3 νν +⋅=
+⋅=−⋅= G
GK
KGKE (2.18)
Usvoji li se Terzaghi-jev princip efektivnih naprezanja, totalna se naprezanja σr
,
prikazana u vektorskom obliku, sastoje od vektora efektivnih naprezanja σ ′r
i vektora
pornog tlaka vode ur
urrr
+′= σσ (2.19)
U takvom se modelu može pokazati da su posmična naprezanja invarijanta, tj. ako je
prema Mohr-ovom zakonu naprezanje u ravnini, posmično naprezanje je:
231 σσ
τ−
= (2.20)
onda je to isto naprezanje izraženo u efektvnim naprezanjima može pisati:
22
)()(
2313131 σσσσσσ
τ−
=−−−
=′−′
=′uu
(2.21)
iz čega se dobiva da je:
ττ =′ (2.22)

2. Osnovni pojmovi elastičnosti i krutosti tla 15
2.3. Povjesni pregled krutosti tla pri malim deformacijama
S obzirom na sve jednostavniju mogućnost pristupa općim informacijama, pa tako i
tehničkim, danas slobodno možemo reći da se iz bilo kojeg standardnog udžbenika za
mehaniku tla može dobiti uvid u opće smjernice "klasične" mehanike tla. Stoga se i ono
što se standardno uči o krutosti i deformacijama tla, danas može nazvati dijelom
"klasične" mehanike tla. Također i ranije smjernice u geotehničkom projektiranju išle su
za time da se odrede opterećenja koja sa svojim faktorima sigurnosti osiguravaju stanje
naprezanja u tlu pri kojima ne dolazi do sloma tla. Kod ovakvog pristupa čvrstoća tla je
bila osnovni parametar, dok se poznavanju krutosti tla pridavala manja pozornost. Za
provjeru pomaka (deformacija) korišteni su empirijski izrazi. Na primjer, korelacija
između dopuštenog opterećenja građevne konstrukcije na tlo, širine temelja i broja
udaraca standardnog penetracijskog pokusa koja osigurava da slijeganje temelja bude
manje od 25 mm (Terzaghi & Peck, 1967). Isto tako prihvaćalo se da linearno-elastični
model tla s konstantnim modulom stišljivosti "dovoljno dobro" opisuje ponašanje
stvarnog tla.
Postupci predviđanja deformacija tla temelji se općenito na mehanici kontinuma (u
praksi najčešće na primjenu teorije elastičnosti) koja zahtijeva poznavanje parametara
stišljivosti tla u dovoljno širokoj okolini oko mjesta djelovanja opterećenja. Ovi se
parametri stišljivosti u praksi određuju laboratorijskim i terenskim pokusima. Međutim,
praksa nas uči da je često pouzdanost predviđanja deformacija tla vrlo slaba i
nedostatna za racionalno projektiranje građevinskih konstrukcija.
Dugo se smatralo da se krute ili prekonsolidirane gline ponašaju kao linearno
elastični materijal ili barem da se dodatna naprezanja u takvim materijalima ponašaju po
pravilima linearne teorije elastičnosti.
Prva je teza bila prvenstveno podržavana istraživanjima ponašanja prekonsolidiranih
glina u laboratorijskim uređajima kakav je, na primjer, troosni uređaj.
Druga je teza podržavana pokazateljima da vertikalna dodatna naprezanja vrlo slabo
ovise o naponsko-deformacijskom zakonu. Iz toga je proizlazilo da točnost predviđanja
slijeganja temeljnog tla prvenstveno ovisi o točnosti utvrđenih elastičnih modula krutih

2. Osnovni pojmovi elastičnosti i krutosti tla 16
glina i njihovoj promjeni s dubinom. Međutim, ubrzo je ustanovljeno da je teško
izmjeriti ove elastične parametre. Standardni laboratorijski pokusi redovito su bitno
potcijenjivali krutost takvih materijala u odnosu na krutosti dobivene povratnim
analizama iz opaženih slijeganja. Čak su i te povratne analize davale rezultate ovisno o
izboru opaženih rezultata i prihvaćenih pretpostavki. Osim za slučaj plitkih temelja, ovi
su problemi uočeni i za slučajeve građevnih jama i savitljivih potpornih konstrukcija.
Rješenje ovih problema pokušalo se naći in situ ispitivanjem tla, ali bez većeg
uspjeha. Premala krutost laboratorijskih uzoraka krutih glina pripisivala se njihovoj
raspucalosti i poremećenju tokom vađenja iz tla i ugradnje u odgovarajući laboratorijski
uređaj. Istraživanja u mehanici tla usredotočila su se na pouzdano određivanje čvrstoće
tla, pa su u tom smjeru unaprijeđeni stadardni troosni uređaj (triaksijalni uređaj) i uređaj
za izravno smicanje (direktni posmik). Premda se dosezanje čvrstoće u ovim uređajima
opet pratilo preko deformacije uzorka (pomaka), nije se dvojilo o tome jesu li izmjerene
deformacije uporabljive za određivanje krutosti tla. Međutim novije spoznaje o krutosti
tla, do kojih se došlo mjerenjima u laboratoriju i in situ, predstavljaju posebnu novost
koja zaslužuje opravdanu pozornost.
Uz pretpostavku da se tlo ponaša linearno-elastično sve se svodilo na određivanje
odgovarajućeg modula elastičnosti, odnosno njegove promjene s dubinom. Takva
praksa se provodila sve do kada su se počeli objavljivati rezultati terenskih opažanja
pomaka tla. Tako su sredinom sedamdsetih godina prošlog stoljeća na iskopima u krutoj
prekonsolidiranoj londonskoj glini izmjereni pomaci u tlu bili znatno manji od
izračunatih, a krutost tla i do deset puta veća od proračuna (Simpson, O′Riordan i Croft,
1979). Također početkom šezdesetih godina u Londonu za iskop u londonskoj glini za
temeljenje zgrade od 35 katova mjeren je pomak vrha dijafragme od svega 5,5 mm. Isto
tako pri probnom opterećenju sloja krede rezervoarom promjera 18,3 m i iste visine za
izgradnju nuklearnog akceleratora 1968. godine, ustanovljeno je da deformacije u
temeljnom tlu ne prelaze veličinu od 0,01% (Burland, 1989). Tada su se ovakve i slične
pojave uvelikog odstupanja mjerenih veličina od projektiranih, tumačile na razne načine
od čega se najčešće upotrebljavala teza o (jako) poremećenim uzorcima tla. Prema
istima uzorci su bili tako poremećeni da se iz njih ne može dobiti pouzdan rezultat o
krutosti tla. Tada su se još više usmjerile aktivnosti prema terenskim ispitivanjima pa je

2. Osnovni pojmovi elastičnosti i krutosti tla 17
došlo do razvoja raznih terenskih uređaja (presiometara i sl.). Međutim pošto se i
takvim uređajima nije došlo do spoznaje zbog čega tolika odstupanja, trebalo je krenuti
drugom pravcu i pronaći relevantne odgovore. Najbolji korak u to vrijeme napravili su
Simpson i dr. (1979) kada su metodom konačnih elemenata analizirali ponašanje tla kao
bilinearno-elastičan materijal. Za početnu krutost tla su uzeli vrijednost koja je deset
puta veća od krutosti tla dobivene na uzorku u laboratoriju. Rezultati su bili ohrabrujući
jer su bili znatno bolji od rezultata s teorijom linearne elastičnosti.
Međutim prave naznake su došle kad se realizirala ideja za lokalno mjerenje
deformacija na samom uzorku tla u ćeliji uređaja za troosno smicanje. Koncem
sedamdesetih i početkom osamdesetih godina prošlog stoljeća počeo je razvoj takvih
uređaja za mjerenje malih deformacija na samoj površini uzorka tla, prvenstveno pri
troosnim pokusima (na pr.: Burland i Symes 1982, Jardine, Symes i Burland 1984,
Clayton i Khatrush 1986, Goto i dr. 1991). Deformacije koje su se mogle registrirati
bile su reda veličine do 0,001% . Pokusima s ovim uređajima ustanovljeno je da je tlo
pri vrlo malim posmičnim deformacijama puno kruće negoli su pokazivala mjerenja na
standarni način. Uočilo se da odnos naprezanja i deformacija postaje izrazito nelinearan
s porastom deformacija do 0,1 % i odgovarajućim padom krutosti i do deset puta
(Jardine i dr. 1984).
Rezultati pokusa, uz korištenje navedenih uređaja, bacili su ozbiljnu sumnju na tezu
o linearno elastičnom ponašanju krutih glina. Međutim, bez obzira na sve sumnje
rezultata ispitivanja jedno je bilo sigurno, a to je da su male deformacije do 0,1 % one
koje se primjećuju ("vide se") na tlu. Kako je terenskim opažanjem ustanovljeno da su
upravo male deformacije do 0,1 % one koje se registriraju i primjećuju odgovor je bio
jasan. Jardine i dr. (1984) analizirali su krutosti tla dobivene praćenjem pomaka tla u
iskopima, ispod ploča pilota u krutom tlu koji su davali posmične deformacije od 0,01%
do 0,1% pod radnim opterećenjem. Oni su pokazali da su krutosti dobivene
laboratorijskim troosnom smicanjem s lokalnom mjerenjem deformacija približno iste
kao i one dobivene na terenu. Također Jardine i dr. (1984) pokazali su na nizu
geotehničkih zahvata da nelinearanost odnosa posmičnog modula i posmične
deformacije u rasponu do 0,1% bitno pridonosi točnosti procjene deformacija u odnosu
prema linearno-elastičnoj analizi s konstantnim modulom. Također ovisnosti posmične

2. Osnovni pojmovi elastičnosti i krutosti tla 18
krutosti o relativnoj posmičnoj deformaciji dobivene tehnologijom mjerenja malih
deformacija na uzorku u laboratoriju za monotona (statička) opterećenja u skladu su s
već ranije poznatim ovisnostima dobivenim pri dinamičkim laboratorijskim pokusima.
Ovdje se prvenstveno misli na pokuse rezononantnog stupca (Atkinson i Sallfors,
1991). Dugo se smatralo da se rezultati dinamičkih pokusa ne mogu primjenjivati za
analize u statičkim uvjetima. Međutim, primjenom nove tehnologije mjerenjima malih
deformacija tla u laboratoriju umanjile su se razlike u shvaćanju dinamičke i statičke
krutosti tla.
U svom radu Ishihara (1982) daje općenitu podijelu ponašanja tla pri smicanju u
ovisnosti o magnitudi posmične deformacije (Slika 2.4.). Na slici su označena područja
u kojima se materijal tla ponaša elastično, elasto-plastično i plastično nakon sloma.
Primjećuje se da se u području vrlo malih deformacija do 0.001 %, većina materijala
odnosno tla ponaša elastično. Te su pojave vezane uz dinamička opterećenja kao što su
seizmička opterećenja i sl. Također u području srednjih deformacija, između 0.02 % i 1
%, ponašanje materijala tla je elasto-plastično. Također za ovo područje je
karakteristična pojava trajnih nepovratnih deformacija. Ove pojave su vezane uz
statična opterećenja, kao što su opterećenja pri temeljenju gdje dolazi do slijeganja tla.
Slika 2.4. Ovisnost mehaničkih svojstava tla u odnosu na posmična naprezanja,
odgovarajuća načela modeliranja i analiza odziva, (Ishihara 1982)

2. Osnovni pojmovi elastičnosti i krutosti tla 19
Za slučajeve kada su posmične deformacije izrazito velike, dolazi do sloma tla, a
materijal, odnosno tlo se ponaša plastično. U ovom području javlja se fenomen
“puzanja materijala”. Naime, tlo (materijal) se deformira bez daljnjeg povećanja
opterećenja uz pojavu plastičnih deformacija (reološki fenomen). Karakteristične pojave
vezane uz deformacije nakon sloma tla su pojave klizanja kosina (pokosa), likvefakcija
pijeska i sl. Na slici 2.4. Ishihara (1982, 1996). daju se područja koja odgovaraju
različitim načinima modeliranja ponašanja tla, kao i odabir odgovarajuće metode
analize modela. U radu se navodi pregledan popis s rezultatima ispitivanja ponašanja
tla od strane raznih autora. Također navodi se različiti pristup određivanja početnog
modula posmika za pojedine vrste tla, te se opisuje ovisnost početnog modula posmika
o srednjem tlaku, zbijenosti i prekonsolidacijskom naprezanju.
Sve učestalija istraživanja malih i vrlo malih deformacija u laboratoriju dovela je do
niza inovacija u primjeni mjernih osjetila koja ugrađuju na uzorke tla u troosnim
uređajima. Tako je danas nezamislivo obavljati pokuse s mjerenjem malih deformacija,
a da se ista ne mjere izravno na uzorku. Stoga postoji niz uređaja osjetila i senzora koji
se baziraju na raznim elektroničkim sklopovima, a sve u svrhu i s ciljem određivanja što
točnijih rezultata naprezanja pri malim deformacijama. Dosta autora piše o malim
deformacijama, ali osjetila koja registriraju sile ili devijatorska naprezanja također
moraju biti izuzetno precizna s velikom točnošću, kako bi rezultati bili uporabljivi.
Tako se može govoriti i o mjernju malih naprezanja.
Jedna od naprednijih metoda u posljednje vrijeme je mjerenje pomoću piezo-
keramičkih pločica koje zovemo bender elementi (eng. Bender Elements). Danas se
često u literature koristi skraćenica BE. Prvu uporabu bender elementa općenito kao
tehnike mjerenja malih deformacija primjenili su Shirley i Hampton (1977). Međutim
primjenu bender elemenata u troosnom uređaju prvi su koristili Shulteiss (1982), Dyvik
i Madshus (1985). Iako davno otkrivena i primjenjena, pouzdana uporaba metode
bender elementa kao suvremene metode mjerenja vrlo malih deformacija s relevantnim
rezultatima smatra se nakon 1996. godine, zašto je najviše zaslužan prof. H.J.Atkinson.
Metoda se bazira na mjerenju brzine širenja posmičnih valova koji prolaze kroz uzorak
tla, pa je neki autori nazivaju još i “dinamička metoda”.

3. Krutost tla i metode mjerenja malih deformacija 20
3. KRUTOST TLA I METODE MJERENJA MALIHDEFORAMCIJA
3.1. Općenito o krutosti tla pri malim deformacijama
Pojavom računalnog vođenja pokusa u geotehničkim laboratorijima kao i
mogućnostima digitalizacije opreme za potrebe mjerenja pomaka u laboratoriju i “in
situ”, te pojavom uređaja i osjetila sa sve većom razlučivosti i točnosti, naveliko je
doprinjelo objavi mnogih rezultata mjerenja malih deformacija tla, kako u laboratoriju
tako in situ. Tako se danas u literaturi mogu pronaći rezultati brojnih ispitivanja
ponašanja tla pri smicanju u području od malih do vrlo malih deformacija (npr. Hardin i
dr. 1994; Shibuya i Mitachi 1994; Shibuya i dr. 1995, Li i Yang 1998, Chee-Ming Chan
2010). Također mogu se pronaći rezultati mjerenja malih deformacija pri smicanju u
području od vrlo malih deformacija do sloma tla na jednom te istom uzorku (Clayton &
Heymann 2001; Awad Al-K & Abdulhafiz 2006; Sfriso i dr. 2008)
Za kvalitetno i ekonomično projektiranje temeljnih konstrukcija te njihovu izvedbu
često je potrebno poznavati pouzdano predviđanje deformacija tla. Prognoze slijeganja
temeljne na rezultatima ispitivanja u običnim laboratorijskim uređajima, kao što su
izravni posmik ili troosni uređaj, bitno precjenjuju veličinu deformacija u krutim
glinama i zbijenim pijescima. Najnovija istraživanja pokazuju da precjenjene
deformacije leže prvenstveno u bitno većim krutostima tla pri vrlo malim
deformacijama kakve standardni troosni uređaj ne može mjeriti. Ograničeni broj
istraživanja nadalje pokazuju da ovisnost modula posmika tla o relativnim posmičnim
deformacijama neobično sliči na ovisnosti koje se standardno koriste u dinamičkim
analizama, a koje su donedavno smatrane neprimjerenima za statičke analize. Ovakva
saznanja su potakla razvoj preciznih metoda za mjerenje malih deformacija na uzorcima
u laboratoriju. Te spoznaje su dodatno afirmirale korištenje rezultata geofizičkih
mjerenja na terenu za koje se smatralo da daju tzv. “dinamičke parametre tla” koji se
nisu mogli pouzdano koristiti za statičke analize. Međutim i prije razvoja uređaja i
opreme za mjerenje malih deformacija u laboratoriju, na području dinamike tla
razvijeno je više terenskih i laboratorijskih načina određivanja početnih modula

3. Krutost tla i metode mjerenja malih deformacija 21
posmika (Woods 1994, Isihara 1996). Sva ta ispitivanja tla odvijala su se u cikličko
dinamičkim uvjetima, pa su stoga parametri tla u području malih deformacija nazivana
“dinamičkim parametrima tla”. Razvojem uređaja i opreme za mjerenje malih
deformacija tla izravno na uzorku (lokalno mjerenje) omogućeno je određivanje
početnih modula posmika za uzorke ispitane u troosnom uređaju pri (monotonim)
statičnim pokusima. Rezultati su pokazali podudarnost s rezultatima dinamičkih
ispitivanja, pa se ranija gruba podjela parametara tla na tzv. “statička” i “dinamička” s
velikom pouzdanošću može odbaciti (Szavits-Nossan V. i dr. 1999.).
Općenito nedostatak u prikazivanju rezultata ispitivanja ponašanja tla pri vrlo malim
deformacijama je u tome što se, uz odnos sekantnog posmičnog modula i posmične
deformacije, ne pruža i prikaz traga efektivnih naprezanja, o kojem u mnogome ovisi
oblik krivulje odnosa sekantnog posmičnog modula i posmične deformacije, posebno
pri deformacijama u okolici sloma.
Na slici 3.1. dat je prikaz područja od vrlo malih, malih i velikih deformacija kao i
pripadajuće metode merenja tih deformacija.
Slika 3.1. Prikaz ovisnosti modula posmika G i posmične deformacije i približnihgranica primjenjivosti važnijih metoda mjerenja deformacija
(Atkinson & Sallfors, 1991)

3. Krutost tla i metode mjerenja malih deformacija 22
3.2. Krutost tla i metode mjerenja malih deformacija u laboratoriju
Kod konvencionalnih troosnih uređaja, oprema za mjerenje deformacije uzorka
zasniva se na posrednom mjerenju pomaka baze (stope) ili kape u troosnoj ćeliji.
Obično se mjerenje deformacija zasniva na principu da se mjeri pomak između dviju
točaka izvan ćelije i to jedne nepomične i druge koja se pomiče s uzorkom preko šipke
za nametanje osnog opterećenja. Tako posredno mjerenje pomaka baze ili kape,
opterećeno je nizom deformacija koje se javljaju u samom sklopu prenosnika pomaka s
uzorka na kapu ili bazu ćelije. Ovakvim postupkom u pomak se ubraja i deformacija
ležaja za pomak klipa, deformacija brtvi između cilindra i klipa postolja troosne ćelije
kojim se nameće sila, deformacije poroznih pločica i filtera koji se stavljaju na uzorak.
Stoga za precizna mjerenja malih deformacija, nužno je ovakav način mjerenja
izbjegavati. Određivanje vertikalnih deformacija posrednim načinom mjerenja traži niz
korekcija, kojima se u obzir uzimaju pogreške deformiranja sklopa uređaja, no i tako
određene su vrlo nepouzdane za male deformacije reda veličina od 0,01 % i manje. O
ovom problemu mjerenja su pisali mnogi autori među kojima i Jardine i dr. (1984) te
Burland (1989).
Stoga se u zadnjih dvadeset pet godina primjenjuju metode ili postupci mjerenja
deformacija izravno na uzorku, koji se jednim imenom nazivaju „metode za lokalno
mjerenje malih deformacija“. To su metode ili postupci kojima se deformacija uzorka
ne opterećuje deformacijom sustavu prenosa sa opreme troosne ćelije na uzorak. Za
provedbu takvih postupaka za lokalno mjerenje malih deformacija potrebna je
odgovarajuća oprema, koja se sastoji od raznih elektro-mehaničkih sklopova, senzora,
pojačala, A/D konvertera i sl. Oprema i osjetila koja se koriste za mjerenje malih
deformacija lokalno na uzorku također imaju pogreške pri mjerenju, ali te pogreške
proizilaze iz tehničkih karakteristika, odnosno tehničkih ograničenja mjerne opreme.
Prije svega tu se misli na tehnička ograničenja u pogledu rezolucije mjernih osjetila,
pogreške točnosti i ograničenja mjernog područja. Stoga, se trebaju razlikovati pogreške
nastale postupkom mjerenja, koja mogu biti posredna (vanjska) ili neposredna (lokalna),
od pogreške nastale iz tehničkih karakteristika opreme za mjerenje.

3. Krutost tla i metode mjerenja malih deformacija 23
3.2.1. Mjerenje rezonantnim stupcem RCT (Resonant Column Test)
Ispitivanje tla gline ili pijeska u laboratoriju metodom rezononantnog stupca često se
koristi kod određivanja tzv. „dinamičkih parametara tla“ ili za određivanje parametara
pri malim deformacijama. Ispitivanja se mogu provoditi na koherentnim uzorcima (prh i
glina) kao i na nekoherentnim uzorcima (pijesak). Uzorci se podvrgavaju torzijskim ili
osnim opterećenjima preko elektomagnetnog sustava opterećenja. Uzorci su valjkastog
(cilindričnog) punog ili šupljeg oblika, standardiziranih dimenzija gdje je visina uzorka
dva i više puta veća od širine baze uzorka. Ispitivanja se mogu obavljati i na drugačijim
obicima uzoraka. Pokusom rezononantnog stupca može se odrediti (početni) modul
posmika uzorka, Young-ov modul elastičnosti, prigušenje Young-ova modula
elastičnosti. Uzorak tla je povezan sa aparaturom za izazivanje vibracija i obično su
zatvoreni u toosnoj ćeliji koja se tlači sa vodom. Prisutnost vode u ćeliji stvara se bočni
tlak (ćelijski), a sa vertikalnim opterećenjem preko kape, odnosno postolja stvara se
osni tlak. Na Slici 3.2. dat je shematski prikaz uzorka tla pri RCT pokusu.
Slika 3.2. Shematski prikaz uzorka pripremljenog za RCT pokusa pokretnom donjompločom (Bui, 2009)

3. Krutost tla i metode mjerenja malih deformacija 24
Kao u svakom troosnom uređaju ovdje se može još zasebno mjeriti i porni tlak u
uzorku. Moderniji uređaji mogu mjeriti porni tlak na vrhu i dnu uzorka, te na taj način
jako precizno voditi pokuse preko diferencijalnog pornog tlaka. Naravno za sve uzorke
se mjeri stupanj saturacije, temeperatura, vlažnost i volumna masa prije i poslije
pokusa. Za razliku od troosnog uređaja (standardnog) za monotona ili ciklička
ispitivanja, oprema koja se koristi kod pokusa rezononantnim stupcem je znatno
osjetljivija i skuplja, a osoblje je obično visokokvalificirano sa višegodišnjim
iskustvom.
U slučajevima kada je amplitude vibracija manja od 10-4 (rad) za dobivene
vrijednosti modula elastičnosti i prigušenja, kao i ostali parametara, smatra se da su
dobiveni nerazornom (nedestruktivnom) metodom. Na na Slici 3.3. prikazana je troosna
ćelija s uzorkom tla i shema za istu pri RCT pokusu.
Slika 3.3. Troosna ćelija sa uzorkom i shematski prikaz za RCT pokus prema Drnevichizvedbi za uzdužno i torzijsko opterećenje
(Department of Civil Engineering – Aalborg University)
Opterećenja koja se koriste u pokusima uglavnom su prethodno definirana
(standardizacijom software-a) poznatim harmonijskim oblicima za koja se može

3. Krutost tla i metode mjerenja malih deformacija 25
odrediti, odnosno kontrolirati frekvencija i amplituda pobude. Sustav se opterećuje
harmonijskim opterećenjem, pri čemu se obvezno kontrolira amplituda i frekvencija
pobude. Pokus se provodi tako da se na početku zadaje opterećenje sa malom
frekvencijom koja se tijekom pokusa postupno povećava sve dok (odziv uzorka)
amplituda deforamcija (c) ne dosegne najveću vrijednost (maksimum). Najniža
frekvencija pri kojoj je odziv najveći, naziva se osnovnom frekvencijom uzorka. Ta
frekvencija uzorka je ovisna o veličini krutosti tla pri malim deformacijama,
geometrijskim karakteristikama uzorka tla (odnosu visine i širine uzorka), te nekim
tehničkim karakteristikama samog uređaja za RCT pokus. Veza između modula
posmika G i osnovne frekvencije uzorka tla može se opisati na sljedeći način:
zIG
zdJGT
(3.1)
gdje je
T moment torzije na vrhu uzorka
h visina uzorka
J torzijski moment inercije baze na kojoj je ukrućen uzorak
G modul posmika uzorka
I moment inercije mase uzorka
gustoća uzoraka
Moment inercije mase uzoraka I, mora biti jednak inercijalnom momentu torzije
sustava opterećenja, postavljenom na vrhu uzorka Io, pa je:
2
2
thIT O
(3.2)
Uz pretpostavku da su rotacije uzorka isto tako harmonijske funkcije, one se mogu
pretpostaviti u obliku:
)sincos()(),( 21 tCtCztz (3.3)
gdje je
zkCzkCz sincos)( 43 (3.4)

3. Krutost tla i metode mjerenja malih deformacija 26
Iz uvjeta da je kut rotacije na bazi uzorka jednak nuli (za z=0), vrijedi da je C3=0,
vrijedi da je moment torzije na vrhu uzorka jednak inercijalnom momentu torzije
sustava (T = T), odnosno postoji ravnoteža momenata torzije, pa se jednadžbe (3.1) i
(3.2) mogu izjednačiti:
)sincos()sin(
)sincos(cos
214200
214
tCtChkChI
tCtChkkCIG
nnn
nnnn
što možemo pisati kao:
s
n
s
n
vh
vh
II
tan
0(3.5)
gdje je vs brzina posmičnih valova u uzorku
Gvs (3.6)
G je modul posmika uzorka
je gustoća uzorka
Slika 3.4. Shema deformacije uzorka pri pokusu rezononantnim stupcem sa pokretnomgornjom pločom (Richter & Huber, 2004)
Iz prethodnoga se može zaključiti da za konkretan slučaju pokusa rezononatnim
stupcem potrebno je poznavati veličine kao što su:
I moment inercije mase uzorka
h visinu uzorka
Io moment inercije sustava opterećenja postavljenog na vrhu uzorka
gustoću uzoraka

3. Krutost tla i metode mjerenja malih deformacija 27
dok se osnovna frekvencija dobije eksperimentalno iz čega se onda može odrediti brzina
posmičnih valova
Isto tako analogno za uzdužno opterećenje može se dokazati da je
p
n
p
n
vh
vh
WW
tan0
(3.7)
gdje je vp brzina uzdužnih valova u uzorku
Ev p (3.8)
E je Young-ov modul elastičnosti
je gustoća uzoraka
Na Slici 3.5. dat je prikaz glavne troosne ćelije u koju se smješta uzorak tla za
ispitivanje rezononantnim stupcem. Takvi uređaji danas se proizvode pod nazivom
RCA (eng. Rezononant Column Apparatus). Upravljački software-i su kompatibilni sa
mjernim senzorima i pretvaračima, a primjer jednog zaslona daje Slika 3.6.
Slika 3.5. Aparatura troosne ćelije za pokus rezononantnim stupcem, komercijalni nazivResonant Column Apparatus (RCA) tvrtke GDS (www.gds.com)

3. Krutost tla i metode mjerenja malih deformacija 28
Slika 3.6. Prikaz zaslona software-a za RCA (Resononant Column Apparatus) tvrtkeGDS pri provedbi pokusa rezononantnog stupca (www.gds.com)
Da bi se pokus uspješno provodio, potrebmo je poznavati masu uzorka i inerciju
rotacije aktivne ploče i dijelova inicijalnog uređaja, koji se giba sa uzorkom. Mjernim
uređajima mjere se amplitude vibracija, za svaki tip pomaka na aktivnom kraju uzorka.
Kada pasivni kraj nije kruto fiksiran isti se pretvornici koriste i za mjerenje amplituda
vibracija za pomake na pasivnom kraju.

3. Krutost tla i metode mjerenja malih deformacija 29
Frekvencija pobude mora biti tako ugođena da bude rezononantna sa sustavom koji
se sastoji od uzorka tla, pripadajućih ploča i uređaja za iniciranje vibracija (pobuda).
Ukoliko frekvencija “nije ugođena” pokus treba ponoviti.
Slika 3.7. Standardizirana izvedba RCT-a za torzijsko opterećenje: (a) pobuda je na baziuzorak, a odziv se mjeri na vrhu (brzina i akceleracija), (b) pobuda je na vrhu imjerenje odziva ja na vrhu uzorka,(Department of Civil Engineering – Aalborg University)
Mjerna osjetila koja se koriste su izuzetno visoke preciznosti (osjetljivosti). Tako
osjetljivost na pomak iznosi 2,5x10-6 m. Rotacija od 10-5 rad, mora se moći očitati sa
najviše 10 % odstupanja za cijeli spektar očekivanih frekvencija. Potrebno je imati x-y
vremenski osciloskop, za promatranje valne forme vala i utvrđivanje rezononantne
frekvencije sustava.
Za pokus rezononantnim stupcem koristi se šupalj cilindričan ili pun valjkasti
uzorak. Omjer visine uzorka i širine baze je definiran (standardiziran) Taj odnos ne
smije biti manji od 2 niti veći od 7. U slučaju da je osno naprezanje uzorka veće od
bočnog naprezanja, omjer duljine uzorka i promjera mora biti između 2 i 3. Uobičajene
dimenzije koje se koriste u laboratorijima su promjera baze d=33-50 mm i visine h=72
mm do h=100 mm (ili d=70 mm i h=140 mm). U zadnje vrijeme koriste uzorci većih
dimenzija zbog nekih drugih razloga koji se ukratko mogu svrstati pod naziv
“kvalitetniji reprezentativniji uzorci”. Ukoliko se koristi uzorak promjera 33 mm

3. Krutost tla i metode mjerenja malih deformacija 30
najveća čestica u uzorku mora biti manja od jedne desetine (1/10) promjera uzorka, a
ako je promjer uzorka 70 mm ili veći, najveća čestica mora biti manja od jedne šestine
1/6 promjera uzorka. Ukoliko se radi o pjeskovitom uzorku tada je ove uvjete
jednostavno zadovoljiti jer se uzorak pijeska prethodno priprema prosijavanjem.
Međutim ukoliko se radi o glinenom ili prahovitom uzorku tada je ove uvjete potrebno
obvezno provjeriti nakon završetka pokusa. Ukoliko se pokaže da je uzorak sadržavao
čestice veličine veće od dopuštenih, svakako tu činjenicu (primjedbu) treba posebno
naglasiti u izvješću s rezultatima ispitivanja.
Slika 3.8. Shematski prikaz i dijelovi aparata za ispitivanje rezononantnim stupcem(Department of Civil Engineering – Aalborg University)
Za torzijsko gibanje, deformacija , je prosječna posmična deformacija u uzorku,
dok je za longitudinalno gibanje, deformacija je prosječna osna deformacija za cijeli
uzorak. U slučaju torzije, posmična deformacija u svakoj točki poprečnog presjeka
varira od 0 (nula) uz os rotacije, do najveće vrijednosti po rubu uzorka. Kod
interpretacije se uzima da je prosječna poprečna deformacija kod poprečnog presjeka
uzorka na položaju od 80 % radijusa uzorka.
Mjerenje rezononantne frekvencije sustava, odnosno postupak određivanja
rezononantne frekvencije sustava jednak je za torzijske i za longitudinalne vibracije.
Rotacijski pretvornik koristi se samo za torzijska gibanja, dok se pretvornik za
longitudinalna gibanja koristi samo za longitudinalna gibanja. Kada je pasivni kraj

3. Krutost tla i metode mjerenja malih deformacija 31
učvršćen (nepomičan) gibanje aktivne ploče koristi se za određivanje rezononance
(rezononantne frekvencije). U ostalim slučajevima za to se koristi gibanje pasivne
ploče. Najvažnija stvar kod provedbe pokusa je u tome da se frekvencija pobude može
kontrolirati (nametati, varirati). Pokus se započinje sa najmanjom mogućom
frekvencijom koja se može kontrolirano nametnuti (npr. 2 Hz), a zatim se frekvencija
povećava do rezononantne frekvencije sustava.
Ako se pretvornik brzine koristi za mjerenje vibracija, rezononantna frekvencija
sustava nastaje kada je formirani oblik (na ekranu) nalik ravnoj, padajućoj liniji.
Međutim ako se koriste pretvornici pomaka ili akceleracije, frekvencija se mora ugađati
(namještati) dok se ne dobije elipsa sa horizontalnim i vertikalnim osima. U novije
vrijeme frekvencija se mjeri digitalnim frekvenciometrima. Rezononantna frekvencija
sustava za torzijska gibanja označava se sa fT, a za longitudinalna gibanja fL. Koristeći
ovu spoznaju, može se izračunati početni posmični modul G0, kako je dato u narednoj
Slici 3.9.
Slika 3.9. Princip određivanja modula posmika G0, pri pokusu rezononantnim stupcem(Department of Civil Engineering – Aalborg University)
Mjerenje amplitude deformacija mora se izvoditi na rezononantnim frekvencijama
sustava. Kod startanja uređaja pretvornici vibracijskog gibanja bilježe val koji je
dobiven pri rezononantnoj frekvenciji, a na temelju kojega možemo odrediti amplitude
tiCt e)(
Acc.
ff
Resonant freq. f1+
Sample Geometry+
End restraint+
Wave equation (torsion)
2
1220 2
Ts F
fHvG

3. Krutost tla i metode mjerenja malih deformacija 32
deformacije. Za povećanje ili smanjenje amplitude naprezanja, napajanje inicijalnog
vibracijskog uređaja mora se povećati ili smanjiti. Nakon promjene jačine napajanja
inicijalnog vibracijskog aparata, mora se provesti (ponovni) postupak utvrđivanja nove
rezononantntne frekvencije sustava, prije nego se pretvornici uporabe za utvrđivanje
nove vrijednosti amplitude naprezanja.
Kako se mjere početni modul posmika, G0, modul elastičnosti, E0 i početno
prigušenje 0 ? Uzorak se pripremi (obavije) u nepropusnu gumenu membranu i stavlja
u troosnu ćeliju. Takav uzorak se podvrgava kontroliranoj konsolidaciji prema
programu ispitivanja. Svojom bazom uzorak se pričvršćuje na bazu postoja koja
prigušuje vibracije (pasivni kraj). Opterećenje se aplicira na vrhu uzorka (aktivni kraj)
kao torzijsko ili osno opterećenje. Na vrhu uzorka (aktivnog kraja) mjerit će se i odziv.
Pobuda se nameće preko frekevencije elektromagnetskog pobuđivača. Frekvencija je u
početku iznimno mala (10 Hz) te se postupno povećava dok se ne odredi prvi (osnovni)
rezononantni mod (rezononantna frekvencija). Kada je poznata rezononantna
frekvencija moguće je povratno izračunati brzinu širenja posmičnih vs ili uzdužnih
valova vl. Kada se odrede brzine valova iz poznatih jednadžbi 3.6. i 3.8 mogu se dobiti
početni modul posmika G0 i početni modul elastičnosti E0.
Slika 3.10. Dijagrami G0 i 0 kao funkcija (Department of Civil Engineering – Aalborg University)
GG0
Amplitude of shear strain
Shea
r mod
ulus
ratio
1,0
0,5
0
Dam
ping
Rat
io
0,2
0
0,1
10-6 10-5 10-4 10-3 10-2
G0
G0 G

3. Krutost tla i metode mjerenja malih deformacija 33
Nakon određivanja rezononantnog stanja, pogon se isključuje, a uzorak prelazi u
stanje slobodnih vibracija. Na temelju oblika valova, određuje se početno prigušenje 0.
Veličina (početnog) prigušenja povezana je s amplitudom deformacija i rezononantnom
frekvencijom sustava. Za mjerenje prigušenja sustava koriste se dvije metode: Prva
metoda je metoda stacionarnog stanja vibriranja (steady state vibration), a druga je
metoda smanjenja amplitude (amplitude decay method). Teoretski gledano, obje metode
morale bi dati identične rezultate, dok se u praksi rezultati neznatno razlikuju jedan od
drugog. Najčešće se koristi metoda stacionarnog stanja vibriranja jer je jednostavnija i
brža.
Slika 3.11. Princip određivanja početnog prigušenja (0) za male vrijednostilogaritamskog inkrementa l, slijedi da je 2/0 l(Department of Civil Engineering – Aalborg University)
Svaka metoda je neovisna jedna od druge, pa je tako procedura za obje metode
neovisna o vrsti gibanja koje se koristi bilo da je riječ o torzijskom ili longitudinalnom
gibanju. Kod metode stacionarnog stanja vibriranja, pri svakoj rezononantnoj
frekvenciji bilježi se izlaz vibracijskog pretvornika (na aktivnom ili pasivnom kraju
ovisno o mjestu mjerenja rezeonanoantne frekvencije) kao i jakost struje dovedene na
inicijalni uređaj. Kada sustav vibrira na rezononantnoj frekvenciji, potrebno je isključiti

3. Krutost tla i metode mjerenja malih deformacija 34
napajanje inicijalnog aparata i zabilježiti izlazni val na pretvorniku koji se koristi za
utvrđivanje rezononantne frekvencije kao funkcije vremena. To daje krivulju prigušenja
vibracija, što se može ilustrativno vidjeti na Slici 3.10.
Slika 3.12. Tipični rezultati pokusa rezononantnim stupcem provedenih na tzv. Drnevichaparatu (Department of Civil Engineering – Aalborg University)
Općenito može se reći da je pokus rezononantnim stupcem trenutno jedna od
najkorištenih tehnika za laboratorijsko određivanje modula posmika pri vrlo malim
deformacijama (Woods 1978, Kim i dr. 1991, Dourudian & Vučetić 1995). S obzirom
na vrlo male deformacije koje nastaju prilikom provedbe pokusa, može se reći da se
radi o pokusu sa nerazornim ispitivanjem (eng. non destructive test). Relativno
pouzdano i praktično se može odrediti ovisnost modula posmika i prigušenja tla o
posmičnoj deformaciji.
Međutim kao svaka laboratorijska tehnika tako i ovaj postupak ima neke nedostatke
i ograničenja koji se moraju uvažavati. Pošto se postupak određivanja parametara
zasniva na povratnoj analizi, izmjereni odziv sustava nije odziv samo od uzorka tla već
i od uređaja, pa je potreban veliki napor (i znanje) da se odvoje parametri tla od
parametara uređaja. Također vrijednost mogućih posmičnih deformacija je u rasponu od
vrlo malih do 5 x 10 -2 (%). Uz sva ova glavna ograničenja pokus rezononantnim
stupcem smatra se samim vrhom laboratorijske tehnike mjerenja “dinamičkih”
parametara.

3. Krutost tla i metode mjerenja malih deformacija 35
3.2.2. Pokus DSDSS (Double Specimen Direct Simple Shear Test)
Mjerenja malih deformacija u standardiziranom aparatu za izravni posmik nisu
davali pouzdane rezultate bez obzira na povećanje razulučivosti mjernih urica i drugih
digitalnih osjetila kojima su se mjerili pomaci i sila. Uzimajući u obzir činjenicu da se
posmično naprezanje računa kao odnos posmične sile i površine uzorka koja se tijekom
pokusa mijenja za pouzdanija mjerenja trebalo je izvršiti znatnu korekciju u
konstrukciji samog uređaja. Isto tako sam uređaj na sebi ima znatan broj mehaničkih
sklopova koji su izloženi trenju i otporima koji za standardne veličine pomaka nisu
bitne i ne utječu na rezultate mjerenja. Međutim kada se radi o malim ili vrlo malim
deformacijama, tada takva trenja ili otpori moraju biti svedeni na najmanju vrijednost, a
ponajbolje uklonjeni. Stoga je istraživač Marshall Silver sa Norveškog Geotehničkog
Instituta (NGI) dizajnirao prvi uređaj za izravni posmik DSS (Direct Simple Shear) na
kojemu su se mogle s boljom pouzdanošću mjeriti male deformacije uzorka, Slika 3.13.
Slika 3.13. Skica uređaja za izravni posmik DSS (Direct Simple Shear) tipa NGI, koju jeizradio Marshall Silver (Doroudian & Vučetić, 1995)
Ovako dizajnirani uređaj u početku se smatrao dostatnim da se iz pokusa izvedenih
na njemu dobiju zadovoljavajući rezultati. Međutim ako se prouči mehanizam rada
stroja, evidentno je da se klizanje postolja odvija preko valjkastih ležajeva koji ne bi

3. Krutost tla i metode mjerenja malih deformacija 36
smjeli imati otpor kotrljanju. Svjesni smo da bez obzira o kakvom ležaju se radilo da
isti ima kakav takav otpor kotrljanju. Taj otpor kotrljanja za male deformacije može biti
znatan pa čak i veći od posmičnog otpora tla. Također pošto se radilo o modifikaciji
standardnog aparata za izravni posmik, prijenos vanjske sile kojom apliciramo
smicanje, odvija se preko niza krutih ploča, ćelijske kape, pa tako ukupna pogreška
mjerenja biva znatna s obzirom na veličine koje se mjere. Zbog postojanja trenja
povezanog s mehanizmom za prijenos opterećenja, kao i ostalih nedostataka parametri
tla pri malim deformacijama u DSS aparatu nisu se često istraživali.
Temeljem prethodnih spoznaja Doroudian M. i Vučetić M. (1995) konstruirali su
prvi uređaj kojemu je eliminirano trenje između kotačića i postolja, uvođenjem novog
koncepta sa dva nasuprot postavljena uzorka. Pokus je nazvan DSDSS (Double
Specimen Direct Simple Shear Test), što je sinonim i za uređaj (Slika 3.14.)
Slika 3.14. Skica suvremenog uređaja za izravni posmik DSDSS(Doroudian & Vučetić, 1995)

3. Krutost tla i metode mjerenja malih deformacija 37
Sa slike se mogu očitati osnovne vrijednosti konfiguracije uzorka, uvjeti opterećenja
i definiranje parametara za pokuse u DSDSS uređaju:
dc = amplituda horizontalnog cikličkog pomaka
Fc= horizontalna ciklička posmična sila
H = visina uzorka
A = površina uzorka
Hdc
c amplituda horizontalne cikličke posmične deformacije
AFc
c 2 amplituda horizontalnog cikličkog posmičnog naprezanja
Valja primjetiti da se na uređaju nalaze tri kape. Gornja, srednja i donja kapa.
Korištenjem dva uzorka smještenim između navedenih kapa eliminirano je trenje
ležajeva između ćelije i kalupa s uzorkom koje se javljalo kod prethodnih uređaja
(DSS). Kod DSDSS uređaja opterećenje se nanosi na srednju kapu koja se nalazi
između dva uzorka. Na taj način srednja kapa izravno prenosi opterećenje na uzorke bez
ikakvih posrednih sklopova (ležajeva i sl.) Osim toga novi DSDSS uređaj napravljen je
od kvalitetnog nehrđajućeg čelika, i opremljen ostalom mjernom opremom visoke
razlučivosti u duhu suvremene tehnologije koja minimalizira pogreške samog uređaja.
Vertikalno opterećenje nanosi se na gornju i donju kapu preko pneumatskog sustava
koji gura (tiska) klip uređaja i stvara vertikalno naprezanje preko gornje i donje kape.
Veličina vertikalnog opterećenja se kontrolira preko regulatora tlaka i mjeri pomoću
osjetila postavljenog između gornje kape i držača pneumatskog klipa. Uzorak se
konsolidira sa željenim vertikalnim naprezanjem, a deformacija (slijeganje) uzorka
mjeri se mikrouricom velike razlučivosti (najmanje 10-3mm) ili LVDT-om (Linear
Variable Differential Transducer). Posmično naprezanje jednostavno se odredi
dijeljenjem horizontalne posmične sile s dvostrukom površinom uzorka.
Uređaj se koristi najčešće za ispitivanja pri cikličkim opterećenjima. Horizontalno
cikličko naprezanje mjeri se na osjetilu za silu, spojenom izravno na srednju kapu.
Horizontalno naprezanje dobije se preko sile koja se nanosi pomoću pneumatskog klipa
ili pomoću horizontalnog klipa spojenog sa srednjom kapom preko opruge na kojoj se

3. Krutost tla i metode mjerenja malih deformacija 38
nalazi mikrourica. Jako je važno kontrolirati male vrijedenosti unešene sile na srednju
kapu kao i pomak izazvan tom silom. Stoga se stavlja opruga kako bi se osigurala bolja
kontrola unašanja “malih” sila, a time i dobivanja malih pomaka. Uređaj je konstruiran
tako da se unašanje horizontalne sile može obaviti i ručno, zašto je potrebno znatno
iskustvo i velika pažnja.
Horizontalni pomaci na srednjoj kapi mjere se pomoću beskontaktnog pretvornika
smještenog između gornje ili donje kape i srednje kape. Za dobivanje pouzdanijih
(preciznijih) rezultata obično se postavljaju dva neovisna beskontaktna pretvornika
pomaka, jedan na donju a drugi na gornju kapu. Nakon očitanja vrijednosti pomaka na
jednoj i drugoj kapi, konačna vrijednost pomaka odredi se kao srednja vrijednost čitanja
mjerenja, s time da njihova razlika odstupanja u pojedinačnim mjerenjima nesmije preći
više od 2 %. Razlučivost (resolution) mjerenja bezkontaktnih pretvornika pomaka je
0,0001 (mm) ili još veća, ako je predmet mjerenja magnetni metal. Na srednju kapu
spojena je aluminijska kružna “meta” (na Slici 3.14. nazvana cilj pretvornika) koja
povećava rezoluciju mjerenja.
Ono što je zajedničko kod DSS i DSDSS uređaja je da se zadržao koncept ugradnje
uzorka na poroznim pločama, zadržana je deformacija poroznih ploča kao i deformacija
kape uređaja. Istina, kod DSDSS uređaja postoje dvije kape pa je ta deformacija nešto
“složenija” nego kod DSS uređaja. No, sve ostalo je potpuno različito, pogotovu sustav
za mjerenje horizontalnog pomaka kao i neutralizacija parazitnih deformacija koje je
imao DSS uređaj. Kako bi se te parazitne funkcije dovele do najmanjih vrijednosti ili
potpuno anulirale, donja, srednja i gornja kapa izrađene su od nehrđajućeg čelika, a
porozne ploče od mesinga. Te porozne ploče od mesinga čvrsto su stisnute, zalijepljene
i navijene u kape uređaja kako nebi bilo nikakvog “lufta” između pločica i kape.
Teoretskim proračunom deformabilnosti čeličnih kapa i poroznih ploča od mesinga,
došlo se do zaključka da je pogreška koju uzrokuje sustav nalijeganja ploča zanemariv i
nema bitnog utjecaja na rezultate pokusa.
Uzorak tla se stavlja u “kalup” i tako konsolidira sa ciljanim konsolidacijskim
naprezanjem. Kada se konsolidacija dovrši, uređaj je tako konstruiran da dopušta
vertikalno poravnanje uzorka ugrađenog u bazu aparata. Nakon toga donja i gornja kapa
se čvrsto fiksira za donju i gornju ploču uređaja pomoću vijaka montiranih na pločama.

3. Krutost tla i metode mjerenja malih deformacija 39
Nakon ugradnje i konsolidaciji uzorak se može podvrgnuti kontroliranom ispitivanju.
Kod provedbe pokusa smicanja odnos naprezanja i deformacija izravno se prati na
zaslonu računala u realnom vremenu (on line). Sve veličine tijekom pokusa (pomaci,
tlakovi, preračunata naprezanja, …) automatski se pohranjuju u računalo.
Kako bi se omogućilo mjerenje malih i vrlo malih deformacija potrebno je obavljati
mjerenje i vrlo malih sila koje će dovesti do tako malih deformacija. Stoga je uređaj
opremljen s vrlo preciznim uređajima visoke razlučivosti.
Razlučivost (resolution) je veličina najmanjeg mjerljivog pomaka (najmanja razlika
pokazivanja pokaznika, tj. “promjena zadnjeg bit-a”).
Preciznost (precizion) je domena devijacija uzastopnih mjerenja istog pomaka pod
istim mjernim uvjetima. Što je standardna devijacija pojedinačnog mjerenja manja to je
mjerenje preciznije i obratno.
Točnost (accuracy of measurement) se opisuje kao korektnost provedenog mjerenja
i predstavlja sposobnost mjernog sredstva da pokazuje vrijednosti koje su bliske pravoj
vrijednosti mjerene veličine. Mjerenje s velikom točnošću imat će malu pogrešku, dok
mjerenja s malom točnošću imat će veliku pogrešku.
Greška (error) je razlika između izmjerenog i stvarnog pomaka. Često se točnost
mjernih uređaja izražava u odnosu na raspon mjerenja ili mjerenu veličinu.
Slika 3.15. Osnovni mjeriteljski pojmovi odnosa preciznosti i točnosti

3. Krutost tla i metode mjerenja malih deformacija 40
Za mjerenje horizontalnih pomaka koriste se beskontaktni pretvornici. Prije uporabe
pretvornici se kalibriraju pomoću vrlo preciznih mikrometara. Napon izlaznog vala
beskontaktnog pretvornika se pojačava preko posebnog predpojačala (amplificirani
napon). Pojačanje napona je toliko veliko da je pomak manji od 0,00001 mm. To je
pomak koji odgovara stupcu napona sutava za prihvaćanje podataka. Ako se takav
pomak podijeli sa visinom uzorka koja je oko 20 mm, dobit će se da je posmična
deformacija manja od 10-4 %, što je izuzetno malo. Razlučivost osjetila za mjerenje
horizontalne sile je 0,0001 N, a kalibrira se prije pokusa nanošenjem opterećenja i
raterećenja (ciklički uvjeti kalibracije).
Pošto se radi o iznimno malim vrijednostima pomaka i sila, pa tako i proračunatih
naprezanja, cijeli sklop je osjetljiv na temeperaturne razlike i vibracije. Kako bi se
smanjili ili neutralizirali temeperaturni efekti razlike cijeli prostor je kondicioniran na
stalnu sobnu temeperaturu od 20 1 C. Problem vibracija nije u potpunosti otklonjen.
Naime, problem vibracija je smanjen određivanjem vibracijskih karakteristika poda u
laboratoriju pomoću posebnih analizatora spektra i obratno, filtriranjem odgovarajućih
visoko-ferekventnih vibracija iz snimljenih valova. Takva obrada spectra valova iz
pretvornika poboljšala je digitalizirane snimke, ali nije u potpunosti riješila problem
vibracija za deformacije manje od 10-3 %. Ovaj problem može se riješiti postavljanjem
cijelog uređaja na vibracijsko izolacijski stol, gdje će se takve štetne vibracije u
potpunosti prigušiti, odnosno ukloniti.
Za potrebe potvrde funkcioniranja cijelog sustava DSDSS uređaja, njegovi autori su
odlučili provesti probno ispitivanje na gumenim uzorcima. Tako u svom radu
Doroudian M. i Vučetić M. (1995.) opisuju postupak izrade gumenih uzoraka i samo
testiranje uređaja. Uzorci su načinjeni od dva tipa gume, jedan od “tvrđe” i drugi od
“mekše” gume. Baza za izradu gumenih uzoraka je tekući silikon poznati kemijskih i
fizikalnih karakteristika. Tekući silikon se izlijevao u prestenaste aluminijske kalupe
promjera 66.0 mm i debljine 20.0 mm. Nakon sušenja gumeni uzorci su se postavljali
između kapa uređaja, te su ukalupljeni (ograđivani) gumenom membranom, armirani
žicom (kao kod standardnog DSS uređaja) i pripremljeni za ispitivanje. Pošto se radilo
o dva tipa gume, a istovremeno se stavljaju dva uzorka, ipitivanja su provedena za sve
moguće kombinacije uzoraka (tvrdi+tvrdi, meki+tvrdi, tvrdi+meki, meki+meki). Ono

3. Krutost tla i metode mjerenja malih deformacija 41
što je karakteristično za oba gumena uzorka i sve kombinacije je da se guma ponaša kao
idealno elastičan materijal i da su joj prigušenja zanemarivo mala, što ukazuje na
kvalitetno i pouzdano mjerenje naponsko deformacijskih karakteristika u DSDSS
uređaju.
Slika 3.16. Rezultati cikličkog ispitivanja gumenog uzorka u DSDSS uređaju(Doroudian & Vučetić, 1995)
U radu Doroudian, M., and Vučetić, M. (1995.) prikazani su rezultati ispitivanja
gumenih uzoraka “meke” i “tvrde” gume u svim kombinacijama. Ti pokusi su
provedeni za provjeru mogućnosti rada DSDSS uređaja kao i provjeru njegove
pouzdanosti s obzirom na očekivane rezultate. Na temelju rezultata pokusa pokazuje se
da su mjerenja korektna, te da je krutost “meke” gume “ različita od krutosti “tvrde”
gume, što je bilo za očekivati. U tabeli 1. dat je prikaz rezultata pokusa:
Tablica 3.1 Podaci sa testiranja na gumenim uzorcima za 3108 c (%)
Test Gornjiuzorak
Donjiuzorak
Vertikalno naprezanjeσv (kN/m2)
Sekantni modul posmikaGs (MN/m2)
1 tvrd tvrd 170-300 252,02 mekan mekan 170-300 106,43 tvrd mekan 170-300 171,24 mekan tvrd 170-300 171,2

3. Krutost tla i metode mjerenja malih deformacija 42
Sekantni moduli posmika dobiveni su iz naponsko deformacijskih krivulja za
cikličko opterećenje (slično kao na Slici 3.16.). Rezultati dobiveni DSDSS pokusom
redovito se prikazuju dijagramima odnosa c (prosječna ciklička amplitude posmične
deformacije) i Gs (sekantni modul posmika)
Kao što je prikazano u tabeli 1. pokus je proveden u svim mogućim kombinacijama.
Uzorci su mijenjali položaje, zamjenjivani su tvrdi sa mekim i obratno. Vertikalno
naprezanje u svim pokusim bilo je isto dok se mjerio modul posmika. Primjećujemo da
je modul posmika za pokus 3 i 4 identičan, što pokazuje na ispravno funkcioniranje
DSDSS uređaja. Analizom rezultata može se pokazati da je vrijednost modula posmika
za 3 i 4 pokus Gs=171,2 MPa dobiven kombinacijom tvrdog i mekanog uzorka,
praktički približno jednak prosječnom modulu posmika dobiven aritmetičkom sredinom
iz dva kruta (test-1) i dva mekana (test-2) gumena uzorka (npr. Gsrednji =
(252,0+106,4)/2 = 179,2 MPa. Ovako dobiveni podaci navode na zaključak da je efekt
rotacije srednjeg poklopca pri malim deformacijama uzrokovan razlikom krutosti
između dva uzorka zanemariv. Uzme li se u obzir da bi razlika krutosti dva uzorka
istoga tla bila puno manja od razlike krutosti ovih gumenih uzoraka daje visoku ocjenu
pouzdanosti i uporabljivosti ovako konsturiranog uređaja za smicanje.
Slika 3.17. Idealizirani ciklički dijagram naprezanja i deformacija(Doroudian & Vučetić, 1995)

3. Krutost tla i metode mjerenja malih deformacija 43
U DSDSS uređaju uzorci se redovito ispituju na ciklička opterećenja (opterećenje i
rasterećenje). U takvim uvjetima tlo se ponaša nelinearno i histeriozno, a modul
posmika i prigušenje tla ovisni su o deformaciji. Na Slici 3.17. prikazana je krivulja
histereze jednog cikličkog pokusa sa karakterističnim vrijednostima koja se daju iščitati,
kao što su:
τc = ciklička amplitude posmičnog naprezanja
c = ciklička amplituda posmične deformacije
Gmax = najveći modul posmika pri malim deformacijama (bliskim 0)
Gs = sekantni modul posmika koji ovisi o vrijednostima c i τc
Veličina koeficijenta prigušenja tla kod cikličkog opterećenja (histereze), može se
dobiti preko ekvivalentno viskoznog prigušenja tako da se odredi površina histereze pri
titranju sa svojstvenom kružnom frekvencijom ωo,
24 cc
w
(3.9)
uzme li se u obzir da elastična energija deformacije predstavlja površinu trokuta
2cc
sw (3.10)
dobivamo konačni oblik koeficijenta prigušenja tla kao:
sww
4 (3.11)
gdje su:
Δw = površina omeđena krivuljom histereze (Jakobsen, 1930.)
ws = površina omeđena trokutom (0, c, τc)
= koeficijent (indeks) prigušenja tla

3. Krutost tla i metode mjerenja malih deformacija 44
3.2.3. Mjerenje bender elementima BE (Bender Elements)
Sve učestalija istraživanja malih i vrlo malih deformacija, dovela su do ekspanzije u
razvoju tzv. dinamičkih metoda za mjerenje krutosti tla pri vrlo malim deformacijama.
Jedna od naprednijih metoda je mjerenje pomoću piezo-keramičkih pločica koje
zovemo bender elementi (eng. Bender Elements), skraćeno BE metoda. Prvu uporabu
bender elementa općenito kao tehnike mjerenja malih deformacija primjenili su Shirley
i Hampton 1977. godine (Jovičić, V. 1996). Međutim primjenu bender elemenata u
troosnom uređaju prvi su koristili Shulteiss (1982), Dyvik i Madshus (1985). Za
vrijednost BE metode kao suvremene metode mjerenja vrlo malih deformacija i njenu
primjenu za geotehničko projektiranje posebno je zaslužan prof. H.J.Atkinson. Na prvi
mah to je relativno jednostavna metoda za određivanje modula posmika pri vrlo malim
deformacijama, no za njenu primjenu u konvencionalne, a posebno istraživačke svrhe
potrebno je dosta iskustva, vještine i znanja. Metoda se bazira na mjerenju brzine
širenja posmičnih valova koji prolaze kroz uzorak.
Slika 3.18. Bender element lijevo-integriran u bazu od pleksiglasa, desno- shematskiprikaz sonde bender elementa (Chee-Ming Chan, 2010)
Bender element se sastoji od dvije tanke piezo-keramičke pločice, čvrsto spojene na
centralnu metalnu ploču. S vanjse strane piezokeramičkih pločica pričvrste se dvije
tanke elektrode. Stavljanjem elektroda pod napon struje, polarizacija uzrokuje
deformiranje (savijanje) elementa. Kada se početni napon struje promjeni, bender
element se deformira (savija) u jednom smijeru što ovisi o smjeru polarizacije. Također
savijanje bender elementa uzrokuje promjenu i izlaznog napona struje. Bender elementi

3. Krutost tla i metode mjerenja malih deformacija 45
uglavnom se izrađuju u dvije varijante, koje se razlikuju samo u načinu električnog
spajanja polariziranih ploča, serijski ili paralelno. U paralelnom načinu izvedbe, dva
piezo-električna sloja imaju isti smjer polova (Slika 3.19.). Ovako paralelno spojeni
bender elementi su kvalitetniji predajnici jer daju veću deformaciju za isti ulazni napon
struje. Na ovaj način početni napon prenesen je na svaku keramičku ploču i nije
podjeljen između dviju ploča kao kod serijskog spajanja. Ovako složeni beneder
elementi koriste se za pokuse kada je potreban ulazni val niskog inteziteta.
Kod serijseki spojenog beneder-elementa smjer polova (polarizacija) dva piezo-
keramička sloja suprotan je jedan drugom (Slika 3.19.) Ovako izrađen bender element
češće se upotrebljava kao prijamnik nego predajnik. Kod komercijalne uporabe većina
proizvođača bender elemenata preporučuju da se bender elementi paralelnog tipa koriste
kao predajnici, a serijski kao prijamnici.
Slika 3.19. Bender elementi: serijski i paralelni tip(Žetko, T., Vrkljan, I., Kvasnička, P., 2010)
Kod izvođenja pokusa svaka od ploča treba ući u uzorak oko 3 mm, a generatori
valova napajaju pretvornike napona sa vrijednošću od oko 20 V. Prvotno se smatralo da
se metoda bender elementa temelji na pretpostavkama, koje su zajedničke za sve
metode koje se bave širenjem valova kroz tlo:
3. Krutost tla i metode mjerenja malih deformacija 46
a) specifične deformacije izazvane u tlu pomoću pobuđivača su vrlo male, odnosno
odgovor na dinamička opterećenja je elastičan
b) duljina puta posmičnog vala odgovara udaljenosti između bender elemenata
c) val koji putuje u uzorku je planarni posmični val, iz čega slijedi da s valom
putuje i poprečna deformacija, odnosno samo poprečno gibanje (deformacija) putuje s
brzinom posmičnog vala
d) uzorak tla se ponaša kao beskonačni medij za datu konfiguraciju izvornik-
prijamnik tako da svi valovi reflektirani od granice uzorka kasnije će doći na prijemnik
od izravnog vala koji je podrijetlom iz odašiljača
Istraživanje opisano u radu doktorske disertacije Jovičić, V. (1997), (City
University, London, Velika Britanija 1997), a kasnije objavljeno poglavlje The
Measurement and Interpretation of Small Strain Stiffnes of Solis detaljno daje analizu i
opisuje razloge za prihvaćenje i osporavanje zajedničkih pretpostavki za sve metode
koje se bave širenjem valova. Autor navodi da postoji vrlo malo dokaza (do tada) u
prilog pretpostavci pod (a) budući da je gotovo nemoguće izmjeriti stvarne (specifične)
deformacije, koje se javlja u kontaktu između tla i elementa. U toku svog programa
ispitivanja uzoraka pijeska, čvrstoće nekih uzoraka bile su niske. Uzimajući u obzir da
je dinamičko opterećenje cikličko opterećenje, ta činjenica ukazuje na to da se kod tla
razvija samo elastična deformacija.
Viggiani (1992) u svome radu prihvaća osnovanu valjanost pretpostavke pod (b).
Međutim pretpostavku pod (c) ograničava i smatra da u općenitom obliku ne vrijedi.
Kod mjerenja metodom bender elementima u troosnom uređaju za raspon udaljenosti i
frekvencije obično se koriste valovi generirani od strane točkastog izvora pobuđivača,
ali mogu biti i kuglasti, tako da nije slučaj da samo poprečno gibanje putuje s brzinom
posmičnog vala. Sferni valovi ispred pokazuju daleko složenije gibanje i oblike
polarizacije od ravnih valova.
Pretpostavku pod (d) zbog složenih rubnih uvjeta u instalaciji bender elemenata u
troosnom uređaju (u to doba) nije bilo moguće provjeriti jer nema analitičkih
jednoznačnih rješenja (u zatvorenom obliku). Stoga je korištena numerička metoda
konačnih elemenata, s kojom je bila provjerena neovisnost metode bender elemenata
kao konfiguracije instalacije odašiljač-prijemnik. Numerička analiza provedena je

3. Krutost tla i metode mjerenja malih deformacija 47
programskim paketom Solvia 90, u tri dimenzije (3D), što je omogućilo poštivanje
složenih rubnih uvjeta bender elementa. Rezultati numeričkih analiza dali su gotovo
identične vrijednosti (kao odgovor) kao što pruža teorija bender elemenata, uključujući i
utjecaj valova na okolnim područjima. Sve značajne pretpostavke vezane uz način
korištenja bender elementa pokazuju njihovu valjanost, potvrđenu pod uvjetima koji se
mogu provjeriti. Međutim, metoda još uvijek ne dopušta rutinsku upotrebu, jer zahtijeva
veliko iskustvo istražitelja s temeljitim znanjem o metodama mjerenja s teorijskom
pozadinom. No, uz pretpostavku da je kontakt između bender elemenata i tla ili stijene
dobar, mogu se dobiti pouzdani rezultati mjerenja vrlo malih deformacija metodom
bender elementa.
Najobuhvatnija analitička rješenja za problem širenja vala kroz tijelo tla, dano je od
strane Sanches-Salinero, Roeset & Stokoe (1986). Predmet rada je širenje valnog
impulsa podrijetlom iz točkastog izvora kroz beskonačno izotropan elastičan medij.
Točkasti izvor gibanja vala ima oblik sinusnog impulsa, koji je polariziran poprečno u
odnosu na poziciju prijamnika. Ovaj val je daleko od toga da bude cijeli jednostavan
poprečno polarizirani val smicanja koji se prostire u uzdužnom smjeru kako se
pretpostavlja metodom bender elementa.
Slika 3.20. Ilustracija titranja sonde bender elementa u smjerovima širenja valova(Fioravante & Capoferri, 2001)
Prednost bender elemenata, u kombinaciji s troosnim uređajem omogućuje
neograničeni broj nerazornih mjerenja modula posmika Gmax tijekom troosnog pokusa
za bilo koji trag naprezanja. Prvi pokusi s relevantnim rezultatima provedeni su u
troosnom aparatu s ćelijom izvedenom prema Bishopa & Wesley (1975), koja je

3. Krutost tla i metode mjerenja malih deformacija 48
opremljena dodatnim osjetilima prema shemi prikazanoj na Slici 3.21. Kao što se iz
slike vidi troosni uređaj je opremljen s predajnim dijelom bender elementa na vrhu
uzorka (transmitter) i prijamnom dijelu beneder elementa na dnu uzorka (receiver).
Pored bender elemenata na vrhu i dnu uzorka, aparat je bio opremeljn i sa dva LVDT
(Linear Variable Differential Transducer) koji su pričvršćeni na sami uzorak tla za
potrebe lokalnog mjerenja deformacija uzorka. Pored ova dva izvan ćelije nalazio se još
jedan LVDT za mjerenje pomaka iz kojega se preračunavala volumna deformacija.
Upravljanje, registriranje podataka i pohranjivanje istih obavljano je automstski preko
računala (Atkinson, Evans i Scott, 1985). Uzorak je bio promjera 38 mm, maksimalni
tlak u ćeliji 700 kPa. Konfiguracija bender element uz troosni uređaj, kao što je
prikazano na Slici 3.21., korištena je za mjerenje vremena širenja posmičnih valova
kroz uzorak tla.
Slika 3.21. Shematski prikaz troosnog uređaja s bender elemenatima BE(Jovičić, 1997)

3. Krutost tla i metode mjerenja malih deformacija 49
Pobuđen vanjski napon sonde bender elementa kreće se i djeluje kao izvor energije u
tlu, tako da se posmični valovi propagiraju daleko kroz uzorak tla. Valovi se primaju na
strani prijamnika, koji je usklađen kako bi se uočili poprečni valovi koji se šire s
posmičnim naprezanjem. Vrijeme putovanja Ta mjeri se kao vrijeme, odnosno
udaljenost između karakterističnih točaka na zaslonu osciloskopa, kao što je prikazano
na Slici 3.22. Točka 1 označava početak uzbude bender elementa (transmitted), u ovom
slučaju sinusnog oblika. Ovo je trenutak otpuštanja energije s bender elemenata u
uzorku. Točka 1” predstavlja početak uzbude prijemnika, koji je označio prijenos
energije iz uzorka u prijamni bender element (received). Uz pretpostavku da su
specifične deformacije u uzorku elastične, pri putovanju posmičnih valova i uz
poznavanje udaljenosti između vrhova bender elementa, La i vremenske udaljenosti Ta,
među točkama 1 i 1” sa Slike 3.22. može se izračunati brzina posmičnih valova vs
pomoću sljedećeg izraza:
a
as T
Lv (3.12)
tako je posmična krutost pri vrlo malim deformacijama definirana izrazom2svG (3.13)
gdje je gustoća suhog uzorka
Slika 3.22. Karakteristične točke mjerenja dolaska vremena sa bender elemenatima(Jovičić, 1997)

3. Krutost tla i metode mjerenja malih deformacija 50
Bender elementi mogu se ugraditi u većinu laboratorijskih aparata, no praktički su
sastavni dio opreme aparata za troosno smicanje. Zbog vrlo jednostavne instalacije,
bender elementi se postavljaju na donju i gornju kapu troosnog aparata. Jedan element
je predajni a drugi prijamni. Obično su bender elementi, odnosno sonde, instalirane u
postolje i kapu aparata koji svojim krajevima “vire” obično 3 mm, a koji se kod
ugradnje utisnu u uzorak.
Slika 3.23. Bender elementi tvrtke Wykheam Farrance namjenjenih mjerenju malihdeformacija u troosnom aparatu i shematski prikaz (www.wfi.co.uk)
Za pokuse u troosnom uređaju koriste se uzorci valjkastog, odnosno cilindičnog
oblika s time da je visina uzorka najmanje 2 puta veća od promjera (širine) baze.
Uobičajeni su uzorci dimenzija 38 x 72 mm, 50 x 100 mm, 75 x 150 mm., no mogu biti
i drugačiji. Pokus počinje tako da se uzorak prethodno konsolidira na zadano
konsolidacijsko opterećenje. Nakon konsolidacije uzorak se podvrgava ispitivanju na
način da se ulazni i izlazni valovi bilježe na zaslonu računala (osciloskopa). Novije
konfiguracije i aplikacije software-a su automatizirane tako da se kroz gotovi paket
upravljanja prolazi kroz više modula na jednom te istom računalu. Računalom se
obavlja kompletan pokus, nameće se inicijalna pobuda i mjeri odziv vala. Kod takvih
konfiguracija nije potreban poseban osciloskop. Takvu konfiguraciju mjerne opreme
(tvrtke GDS Instruments Ldt) posjeduje laboratorij Zavoda za geotehniku Građevinskog
fakulteta Sveučilišta u Zagrebu (Slika 3.24.) na kojemu su provedeni pokusi ispitivanja
krutosti pijeska pri vrlo malim deformacijama za potrebe ovoga rada, o čemu će biti
više u nastavku.
krajevi sonde bender elementa
tijelo (kapa ili baza) od titana

3. Krutost tla i metode mjerenja malih deformacija 51
Prilikom mjerenja BE metodom koriste se različiti oblici inicijalnih valova, različite
frekvencije i amplitude valova. Pošto se radi o gotovo nerazornoj metodi ispitivanja,
nakon provedbe pokusa mjerenja vrlo malih deformacija, na uzorku se mogu provoditi i
ostala monotona ili dinamička ispitivanja.
Slika 3.24. Bender elementi tvrtke GDS u troosnom uređaju Zavoda za geotehniku naGrađevinskom fakultetu u Zagrebu (2006)
U laboratorijima se gotovo uvijek obavljaju mjerenja u smjeru vertikalne osi uzorka
(cilindra). Za tu potrebu jedan bender elemenat se postavlja na postolje a drugi na vrh
uzorka. Na takav način ispituju se uzorci u izotropnom stanju, odnosno obavlja se
mjerenje posmičnih valova u smjeru vertikalne osi (osna mjerenja). Međutim danas
postoje i “horizontalni” bender elementi koji se mogu koristiti istovremeno sa osnim
elementima (Slika 3.25.). Horizontalni bender elementi izrađuju se po istom principu
kao i osni s time da su prilagođeni za kvalitetnu ugradnju na bočne strane uzorka. Da bi
se elementi pričvrstili na bočne stranice uzorka koji je redovito u gumenoj membrani,
koriste se razne specijalne tehnike pričvršćivanja. Zajedničko je za sve da se gumena
membrana mora perforirati kako bi krajevi sonde bili u dodiru s uzorkom. Nakon
perforacije specijalni gumeni priključci se zapečate kružnim prstenovima kako bi se
osiguralo brtvljenje membrane. Ovakvim postupkom pokus je izložen mogućim
pogreškama kod brtvljenja što za posljedicu ima pojavu problema kod saturacije i

3. Krutost tla i metode mjerenja malih deformacija 52
konsolidacije uzorka. Stoga se vrlo često događa istjecanje vode iz uzorka (mješanja
ćelijske vode i vode pornog tlaka u uzorku), što se detektira u mjerenju B-parametra.
Time je pokus osuđena na postupak ponavljanja. Ovi horizontalni elementi su
uglavnom manjih dimenzija i manje težine.
Slika 3.25. Bender elementi tvrtke GDS, lijevo–osni, desno–horizontalni elementpričvršćen na uzorak (www.gdsinstruments.com)
Slika 3.26. Polarizacija horizontalnog bender elementa, horizontalno širenje-horizontalna polarizacija, horizontalno širenje-vertikalna polarizacija,vertikano - širenje-horizontalna polarizacija (www.gdsinstruments.com)
Postoji više metoda koje se koriste za mjerenje bender elementima. Obično se
koriste:
metoda očitanja nailaska prvoga vala
metoda Cross korelacije valova
metoda rezonantne frekvencije
metoda višestrukih refleksija

3. Krutost tla i metode mjerenja malih deformacija 53
Metoda očitanja nailaska prvoga vala
To je jedna od teoretski najjednostavnijih metoda ali praktički najzahtjevnija i često
manje pouzdana metoda u odnosu na ostale. Razlog je u subjektivnom očitanju,
odnosno poklapanju vala. Naime, rezultate najčešće dobivamo očitanjem nailaska prvog
posmičnog vala. Inicijalni valovi su sinusoidalnog ili pravokutnog oblika. Međutim
očitanja su vrlo zahtjevna i subjektivna iz razloga što su odzivi oblika krivulje
poprilično nečitljivi (imaju nepravilan oblik krivulje na ekranu osciloskopa), pa je
istražitelj primoran puno puta ponavljati inicijaciju (pobudu) kako bi dobio čitljiv i
jasan val.
Slika 3.27. Primjer očitanja prvog vala pri sinusnom inicijalnom valu (vrijeme nailaskaprvog posmičnog vala je to (Chee-Ming Chan, 2010)
Slika 3.27. pokazuje čitljiv prvi val koji se može jasno uočiti, što baš i nije česta
pojava kod provedbe pokusa. Generatori valova i funkcije opskrbljuju beneder elemente
naponom u predajniku od 20 V. Taj napon inicira pomicanje bender elementa i
pojavljuje se posmični val koji prolazi kroz uzorak. Bender element ima “povratnu
funkciju”. Kada val dođe do prijamnika uzrokuje pomak prijamnika, a taj pomak inicira
nastanak malog napona. Svaki val emitiran kroz uzorak bilježi se digitalnim
osciloskopom, a modul posmika G se računa na temelju brzine posmičnih valova prema
izrazu (3.13). Osnovni problem ove metode je subjektivnost određivanja brzine
posmičnih valova vs. Kako se u izrazu brzina kvadrira, vidljivo je da i male pogreške u

3. Krutost tla i metode mjerenja malih deformacija 54
očitanju brzina mogu dati velike razlike u modulima posmika. Također neki istraživači,
pa i proizvođači opreme preporučaju da se očitava vrijeme između maksimuma prvog
inicijalnog vala i maskimuma drugog očitanog vala. Ova preporuka je ograničena i
vrijedi samo kod sinusnog inicijalnog vala. Ovakav pristup je u mnogome jednostavniji
za uporabu, jer se smanjuje subjektivna pogreška zbog vidljivije uočljivost maksimuma
krivulja.
Slika 3.28. Određivanje vremena prolaska na temelju udaljenosti maksimuma inicijalnogi dobivenog vala, tpk-pk (Chee-Ming Chan, 2010)
Metoda Cross korelacije valova
To je adaptacija konvencionalnih metoda analize signala. Prvi ju je uveo Viggiani i
Atkinson (1995) u kontekstu primjene bender elemenata u ispitivanju tla. Metoda cross-
korelacijske analizira mjerenje razine poklapanja signala ili međuodnos između dva
signala, inicijalnog T(t) i dobivenog R(t), što se izražava cross-koeficijentom korelacije,
CC(ts), gdje je Tr gdje je vrijeme snimanja, a ts je vremenski pomak između dva
signala.
rT
sr
s dttRttTT
LimtCC )()(1)( (3.14)
gdje je T emitirani, a R dobiveni signal vala.

3. Krutost tla i metode mjerenja malih deformacija 55
U cilju primjene ove metode, to je pogodno za pretvaranje signala iz vremenskog
područja u frekvencijsku domenu, pri čemu dekompozicija signala proizvodi skupine
harmonijskih valova s poznatim amplitudama i frekvencijama. Zajednički algoritam za
tu svrhu koristiti rezultate brze Fourier-ove transformacije, koja pretvara signale do
njihovog linearnog spektra, dajući veličinu i fazni pomak za svaku harmonijsku
komponentu signala. Cross korelacija u suštini mjeri razinu podudarnosti (poklapanja)
između inicijalnog i dobivenog signala.
Slika 3.29. Određivanje vremena prolaska na temelju korelacije inicijalnog i očitanogvala, tcc (Chee-Ming Chan, 2010)
Koristeći iste signale kao na Slici 3.28., prikazan je primjer primjene metode Cross
korelacije, gdje se funkcija Cross korelacije crta uz signal dobivenog vala. U idealnom
slučaju, maksimum funkcije Cross korelacije trebao bi odgovarati prvom pozitivnom
ekstremu (prvom vrhu) u signalu dobivenog vala. Međutim, prvi pozitivni ekstrem,
odnosno prvi pozitivni vrh rijetko ima najveću vrijednost u signalu dolaznog vala, pa
time ne daje maksimum funkcije Cross korelacije. To je dovelo u zabludu tumačenje
očitanja vremena, koje se kasnije određuje mjerenjem od “vrha” signala. Takve
pogreške nalazimo u radovima (Yamashita i dr. 2009.), gdje je prikazano veliko
rasipanje u očitanju vremena dolaska. Podaci dobiveni iz ove metode u radu Arulnathan
i dr. (1998.) govore o nevjerodostojnosti ove metode, uglavnom zbog složene prirode

3. Krutost tla i metode mjerenja malih deformacija 56
dobivenog signala (ponajviše u ovisnosti o frekvencijama). Ukratko, metoda se može
primjenjivati u praksi, ali kod analiza rezultata potrebno je dodatno pojašnjenje razlika,
pa treba biti posebno opazriv.
Međutim razvojem računalne tehnike na tržištu se mogu naći računalni programi
(software) pomoću kojih je moguće na temelju koleracija iniciranog i dobivenog vala,
odrediti vrijeme prolaska kroz uzorak. Primjenu takvih programa može se vidjeti u radu
Taka i Berry (2002) gdje program Lebview proračunava maksimalnu koleraciju između
emitiranog i dobivenog vala. Taka i Berry (2002) ispitivali su uzorak kaolinske gline
koji su podvrgli različitim sfernim naprezanjima u troosnom aparatu. Jedan uzorak su
podvrgli sfernom naprezanju od 100 kPa, a drugi 200 kPa. Na svakom uzorku inicirali
su po jedan posmični val sinusidalnog oblika sa različitim frekvencijama: 1.1, 2.1, 3.3,
4.3 kHz. Dobivene podatke analizirali su na dva načina: na temelju mjerenja vremena
između prvog maksimalnog inicijalnog i prvog maksimalnog očitanog vala i
korelacijskim programom (software-a) Labview. Rezultat je prikazan na Slici 3.30., iz
koje se može iščitati da pri najvećoj korištenoj frekvenciji (4,3 kHz), oba načina
analiziranja daju gotovo identične rezultate. Stoga se preporuča da se prilikom
ispitivanja koriste visoke frekvencije pobude. Ono što je još karakteristično sa slike,
vidi se da brzina posmičnih valova uvelike ovisi o sfernom efektivnom naprezanju,
odnosno da brzina prolaska posmičnih valova kroz uzorak raste sa stupnjem
konsolidacije uzorka.
Slika 3.30. Usporedba rezultata dobivenih korelacijom i očitanjem dva maksimuma(Taka i Berry, 2002)
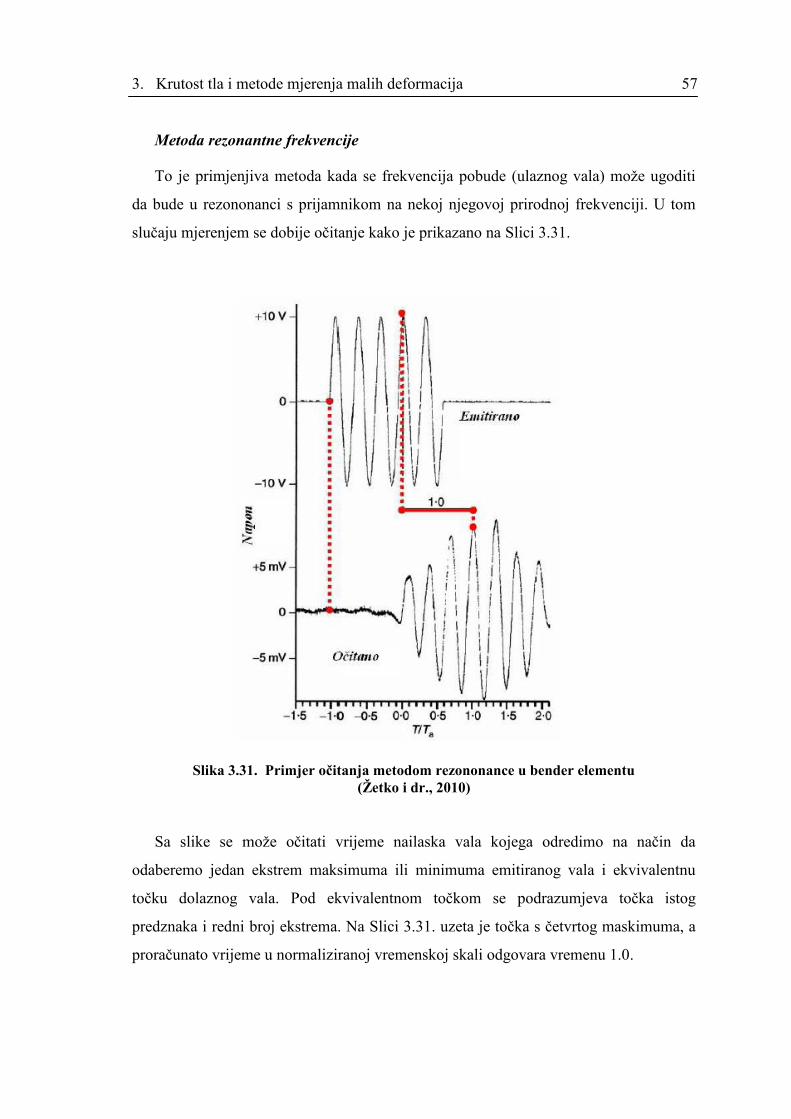
3. Krutost tla i metode mjerenja malih deformacija 57
Metoda rezonantne frekvencije
To je primjenjiva metoda kada se frekvencija pobude (ulaznog vala) može ugoditi
da bude u rezononanci s prijamnikom na nekoj njegovoj prirodnoj frekvenciji. U tom
slučaju mjerenjem se dobije očitanje kako je prikazano na Slici 3.31.
Slika 3.31. Primjer očitanja metodom rezononance u bender elementu(Žetko i dr., 2010)
Sa slike se može očitati vrijeme nailaska vala kojega odredimo na način da
odaberemo jedan ekstrem maksimuma ili minimuma emitiranog vala i ekvivalentnu
točku dolaznog vala. Pod ekvivalentnom točkom se podrazumjeva točka istog
predznaka i redni broj ekstrema. Na Slici 3.31. uzeta je točka s četvrtog maskimuma, a
proračunato vrijeme u normaliziranoj vremenskoj skali odgovara vremenu 1.0.

3. Krutost tla i metode mjerenja malih deformacija 58
Metoda višestrukih refleksija
To je jednostavna i vrlo efikasna metoda određivanja brzine posmičnih valova.
Pomoću ove metode, na domišljat način se premošćuje nesigurnost u određivanju
duljine uzorka i vremena prolaska vala. U radu Lee & Santamarina (2005) daje se opis
metode višestrukih refleksija, gdje se za demonstraciju tog koncepta koristi posebno
osjetilo koje je filtriralo bočne P-valove (Slika 3.32).
Slika 3.32. Koncept metode višestrukih refleksija(Lee & Santamarina, 2005)
Dimenzije osjetila su znatno veće u odnosu na one koji se koriste u
konvencionalnim troosnim ćelijama, što se smatra najvećom manom ove metode u
primjeni.
Da bi se odredilo vrijeme prolaska vala, potrebno je odrediti presjecište (cross-
corelation) između prvog x(t) i drugog nailaska vala z(t). Vrijeme nailaska vala
odgovara maksimumu presjecišta, (Slika 3.33. b). Ovim postupkom vrlo efikasno i
jednostavno se odredi vrijeme nailaska vala kao i duljinu puta vala, a brzina posmičnih
valova odredi se iz izraza:
cc
bS t
LLV )2(2 (3.15)

3. Krutost tla i metode mjerenja malih deformacija 59
Slika 3.33. Rezultati ispitivanja višestrukom refleksijom (a) prvi i drugi nailazakprecizno su izmjereni, (b) presjecište-maksimum odgovara vremenu prolaska od1,725 ms, (c) prvi nailazak S-vala 0,715 ms, (Lee & Santamarina, 2005)
Za mjerenje vrlo malih deformacija tla, primjenom metode bender elementima,
neophodno je kvalitetno razumjevanje različitih čimbenika koji utječu na rezultate
mjerenja. Također za interpretaciju rezultata mjerenja, potrebno je uzeti u obzir sve
čimbenike koji utječu na rezultate mjerenja. Kao kod svih laboratorijskih pokusa, tako i
kod metode bender elementima rezultati pokusa su opterećeni subjektivnom pogreškom
ispitivača kod ugradnje uzorka u toosnu ćeliju i pozicioniranja osjetila bender
elemenata. Iskustvo ispitivača kao i vještina ugradnje su vrlo važan čimbenik u
provedbi pokusa. Drugi važan čimbenik je umješnost i pouzdanost provedbe samog
pokusa prema pomno definiranim procedurama, odnosno mjerenja relevantnih veličina.
Treći važan čimbenik, na kraju, je interpretacija rezultata mjerenja za provedenu
metodu mjerenja. Pored ova tri subjektivna čimbenika na rezultate mjerenja bender
elementima utječe niz ostalih fizikalnih čimbenika kao što su inducirana frekvencija,
visina uzorka, amplituda valova, vrsta vala koji se mjeri, svojstva posmičnih valova,
sferno naprezanje na uzorku, itd.

3. Krutost tla i metode mjerenja malih deformacija 60
Osnovni čimbenici koji utječu na rezultate mjerenja bender elementima su:
vlažnost uzorka
duljina uzorka
sferno naprezanje
oblik signala vala
interferencija (elektomagnetsko preklapanje)
frekvencija vala pobude
efekat bliskog polja
Vlažnost uzorka
Vlažnost uzorka ima bitan utjecaj na rezultate mjerenja bender elementima.
Preporuka je da uzorci kod ispitivanja budu suhi zbog velike električne impendacije. U
slučaju da su uzorci mokri ili saturirani obvezna je izolacija bender elemenata. Za
dugotrajna i opsežna ispitivanja u vodi (troosnoj ćeliji) i na saturiranim uzorcima, kao
izolatori bender elemenata najpouzdanije su se pokazali poliuretani ili katrani.
Testiranja su pokazala pouzdanost ispravnog rada bender elemenata do 2 mjeseca u
NaCl otopini (Viggiani & Atkinson, 1997). Danas gotovo svi proizvođači nude bender
elemente sa izolacijskim presvlakama na bazi poliuretana, tako da je njihova trajnost pri
ispitivanjima znantno produljena.
Duljina uzorka
Duljina uzorka ima bitan utjecaj na vrijeme prolaska vala. U radu Viggiani, G. &
Atkinson, J. H. (1995.) ispitivani su uzorci gline, valjkastog oblika, različite duljine
(visine). Uzorci su grupirani u više grupa različitih duljina, a svaki bender element je
utisnut u uzorak 3 mm. Time je udaljenost između bender elemenata bila kraća za 6
(mm) (2 x 3 mm) u odnosu na duljinu uzorka. Na slici 3.34. data je interpretacija
rezultata obavljenih pokusa.

3. Krutost tla i metode mjerenja malih deformacija 61
Slika 3.34. Odnos između duljine uzorka i vremena prolaska vala(Viggiani & Atkinson, 1995)
Iz Slike 3.34. može se uočiti da se sva tri pravca sijeku u točki od oko 6 (mm). Ovaj
podatak na neki način potvrđuje pravilo da se za duljinu puta vala uzima razmak
između vrhova sondi bender elemenata, a ne duljina (visina) uzorka kako su neki
istraživači u početku opisivali.
Sferno naprezanje
Sferno naprezanje utječe na brzinu prolaska vala. Također iz Slike 3.34. uočava se
da s porastom sfernog naprezanja, skraćuje se vrijeme prolaska vala, što ima izravan
utjecaj na brzinu vala. Ovo je vrlo važan podatak jer brzina vala je prijeđeni put u
jedinici vremena, a modul posmika ovisi o kvadratu brzine. Stoga naizgled male razlike
u vremenu prolaska vala, mogu dovesti do velikih razlika u vrijednostima modula
posmika G.
U svom radu Ferreira i dr. (2006.) uspoređujući rezultate pokusa provedenih na
pijesku, ondosno mjerenja vrlo malih deformacija sa rezonantnim stupcem (Resonant
Column Test) i bender elementima (Bender Elements) daje prikaz utjecaja efektivnog
sfernog naprezanja p na veličinu modula posmika G. Na slici 3.35 može se iščitati da je
vrijednost modula posmika G, za sferna naprezanja iznad 100 kPa gotovo linearno
proporcionalna sa efektivnim sfernim naprezanjem p. Ova ovisnost gotovo se može
opisati kao u segmentima linearana funkcija za određena područja vrijednosti
efektivnog sfernog naprezanja.

3. Krutost tla i metode mjerenja malih deformacija 62
Slika 3.35. Odnos G i p za uzorke ispitane metodom RCT i BE(Ferreira, Viana da Fonseka & Santos, 2006)
U radu Jovićić V. (2006) za Dogs Bay pijesak ispitivan u troosnomu ređaju s bender
elementima, navodi se da rezultati ispitivanja krutosti u nedreniranim uvjetima ponaša
po matematičkoj zakonitosti za nedrenirane uvjete posmične čvrstoće, a da krutost
pijeska u nedreniranim uvjetima za jako zbijene pijeske znatno raste s porastom
efektivnog sfernog naprezanja. U radu se navodi da je pijesak podvrgavan velikim
sfernim naprezanjima u rasponu od 50 kPa do 3100 kPa. Slika 3.36. daje prikaz utjecaja
efektivnog sfernog naprezanja p na veličinu modula posmika G.
Slika 3.36. Odnos modula posmika G i sfernog naprezanja p za uzorke Dos Baypijeska ispitane metodom BE, (Jovičić, 2006)

3. Krutost tla i metode mjerenja malih deformacija 63
Oblik vala
Oblik vala utječe na rezultat mjerenja bender elementima. Jedan od najvećih
problema ispitivaču je odrediti vrijeme prvog nailaska vala. Kod mjerenja vrlo malih
deformacija metodom bender elementima za inicijalne valove pobude najčešće se
koriste harmonijski poznati sinusni signali ili pravokutni signali valova (Slika 3.37.).
Slika 3.37. Tipičan zapis osciloskopa prilikom ispitivanja bender elementima, a)sapravokutnim inicijalnim valom, b) sa sinusnim inicijalnim valom
(Viggiani & Atkinson, 1995)
Koji val odabrati ovisi o aparaturi s kojom raspolažemo i iskustvu ispitivača. Pošto se
odzivni val najčešće ponaša slično kao ciklička nepravilna harmonijska funkcija, ovisno
o metodi interpretacije rezultata ispitivač će primjeniti inicijalni impuls sinusnog ili
pravokutnog oblika. U pravilu uzima se onaj val koji daje čitljiviji rezultat.
Interferencija (elektromagnetsko preklapanje)
Interferencija je pojava superpozicije valova koji se susretnu u jednoj točki prostora,
pa utječe na rezultat mjerenja bender elementima. Preklapanje siglana između
predajnika i prijamnika bender elementa prikazuje se kao izlazni val s ranom
komponentom koja je kvazisimultana s ulaznim valom. S obzirom na način spajanja
sonde (polarizacije) bender elementa razlikujemo dva tipa: serijski i paralelni. Za
potrebe određivanja pojave interferencije provedena su eksperimentalna ispitivanja na
serijskom i paralelnom tipu bender elemenata u kombinacijama sa uzemljenjem (Lee &
Santamarina 2005). Slika 3.38. pokazuje četiri kombinacije spajanja bender elemenata.

3. Krutost tla i metode mjerenja malih deformacija 64
Slika 3.38. Efekt interferencije, vanjske electrode na oba elementa spojene sun auzemljenje (Lee & Santamarina, 2005)
Vidljiv je tipičan efekt interferencije, promatran s dva bender elementa serijskog tipa
bez uzemljenja. Interferencija se može uspješno odstraniti spajanjem predajnika ili
prijamnika na uzemljenje. U paralelnom tipu spajanja, vanjske elektrode izazivaju efekt
štita kad su spojene na uzemljenje. Stoga je interferencija vrlo važna kod ispitivanja na
vlažnim uzorcima. Uglavnom interferencija nastaje kada se koriste dva paralelena tipa
bender elemenata. Stoga proizvođači često preporučuju korištenje paralelnog tipa
bender elementa kao predajnika (transmiter), a serijskog tipa bender elementa kao
prijamnika (reciver).
Frekvencija pobude
Frekvencija pobude znatno (jako) utječe na rezultat mjerenja bender elementima. Da
bi se dobili dovoljno čitki signali valova prilikom pokusa, odnosno rezultati pokusa za
daljnu interpretaciju, jako je važno znati koliko veliku ili malu frekvenciju pobude
koristiti kod ispitivanja. U radu Jovičić. V., Coop. M.R. & Simić, M. (1996) navodi se
prema ispitivanjima Sanhes-Saliero, Roset & Stokoe (1986) sa valovima pobude
sinusoidalnog oblika da ulazna frekvencija inicijalnog vala ima veliku ulogu u kreiranju
oblika odzivnog vala u uzorku. U radu su pokazali da oblik vala ovisi od veličini Rd

3. Krutost tla i metode mjerenja malih deformacija 65
koja je označena kao odnos udaljenosti bender elemenata i valne duljine. Međutim
valna duljina predstavlja odnos brzine prolaska vala i frekvencije inicijalnog vala, pa
time i veličina Rd ovisi o frekvenciji inicijalnog vala (pobude). Također su uočili da se
deformacija vala povećava sa čvrstoćom materijala. Prema rezultatima istraživanja
potvrđeno je da Rd ovisi ne samo o frekvenciji inicijalnog vala (pobude) (f), već i o
brzini prolaska vala (vs). Tako se frekvencija inicijalnog vala (pobude) može dobiti iz
izraza:
Tf 1
2
(3.16)
gdje se valna duljina dobije iz izraza:
fvs (3.17)
Prema prethodnome veličina omjera je:
sd v
fddR
(3.18)
gdje su:
valna duljina
d udaljenost između vrhova sondi bender elemenata
f frekvencija inicijalnog vala (pobude)
kutna brzina
T period frekvencije
vs brzina posmičnih valova u uzorku
Na Slici 3.39. prikazani su rezultati mjerenja bender elementima na uzorku
normalno konsolidirane gline sa različitim vrijednostima frekvencije pobude (Sanches-
Salinero, Roset & Stokoe, 1986). U prvom pokusu korištena je frekvencija pobude od
1.8 (kHz), što za rezultat daje omjer Rd = 1.10, dok je u drugom pokusu korištena
frekvencija pobude od 15 (kHz) i dobivena vrijednost omjera je Rd = 8.1. Vrijednost
većeg omjera Rd upućuje na jasno vidljiv i čitljiv nailazak posmičnog vala. Niža
vrijednost omjera Rd upućuje na prisutnost efekta “bliskog polja” koji je vidljiv na
dijagramu prije stvarnog dolaska posmičnog vala (točka T/Ta=1.0). Efekat bliskog polja

3. Krutost tla i metode mjerenja malih deformacija 66
je specifična pojava koja se gotovo redovito javlja prilikom ispitivanja uzorka s bender
elementima bilo sinusiodalnog ili pravokutnog inicijanlnog signala vala pobude. O ovoj
pojavi pisali su Salinero, Roseset & Stokoe (1986), Viggiani & Atkinson (1995),
Bonal, Donohue & McNally (2010) i mnogi drugi.
Slika 3.39. Rezultati mjerenja sinusnim ulaznim valovima u kaolinskoj glini(Viggiani & Atkinson, 1997)
Ovi podaci pokazuju da je za dobivanje dovoljno čitljivih rezultata potrebno
dovoljno velika frekvencija pobude, odnosno visoki omjer (Rd). Međutim i taj omjer
(Rd) mora imati graničnu vrijednost. Naime, u laboratorijskim uvjetima provedbe
pokusa, taj uvjet održanja kontrolirane visoke frekevencije nije baš jednostavan niti ga
je lako ostvariti jer se redovito kod tvrđih uzoraka često pojavljuje efekat tzv.
“nadvišenja” (overshooting).

3. Krutost tla i metode mjerenja malih deformacija 67
Slika 3.40. Zapis osciloskopa pokazuje “nadvišenje” (overshooting) za pravokutni valu mekoj stijeni (veličina mreže je 5(V) za ulazni val, a 0,5 (V) za očitani val
(Jovičić, Coop & Simić, 1996)
Granična frekvencija kod koje se događa “nadvišenje” ovisi o relativnoj impedanciji tla
i beneder elementa. Neki autori smatraju da je za ispitivanje vrlo malih deformacija tla
metodom bender elementa, optimalna frekvencija pobude između 2 i 7 (kHz). Ovaj
problem se redovito događa kod prekonsolidiranih uzoraka praha, gline ili jako zbijenog
pijeska. Na Slici 3.40. dat je zapis osciloskopa koji pokazuje nadvišenje (overshooting)
kod ispitivanja uzorka meke stijene (Jovičić, Coop & Simić, 1996.) Također rezonantna
frekvencija bender elemenata utječe na veličinu polja u blizini, vrijeme putovanja vala,
razlučivost i dubinu prodiranja vala. Dakle, rezonantna frekvencija je važan parametar u
dizajnu instalacije bender elemenata.
Efekt bliskog polja
Efekt bliskog polja utječe na rezultate mjerenja bender elementima. Može se reći da
je to specifična pojava koja se javlja kod svakog pokusa bilo da se radi o sinusoidalnom
ili pravokutnom inicijanlnom signalu vala pobude. Stoga neki autori smatraju da se radi
o možebitnoj pogrešci očitanja koju su potvrdili Brignoli & Gotti (1992) a spominje se
u Viggiani & Atkinson (1995). Na temelju prethodnih studija i ispitivanja Salinero,
Rosset & Stokoe (1986) pokazali su da prva deformacija vala nije proizvod nailaska
posmičnog vala već nailazak tzv. komponente “bliskog polja”, koja putuje brzinom

3. Krutost tla i metode mjerenja malih deformacija 68
kompresijskog (tlačnog) vala. Također dotadašnje parametarske studije prolaska
elastičnih valova kroz elastični medij koje su izvodili Mancuso & Vinale (1988)
pokazuju da efekat “bliskog polja” može prekriti “zamaskirati” nailazak posmičnog vala
kada je udaljenost od predajnika do prijamnika vala između 0,25 do 4 valne duljine ().
Temeljem prethodnoga udaljenost od predajnika do prijamnika vala između može se
ocjeniti iz izrazaf
vs , gdje je f srednja frekvencija očitanog vala. Detaljnije o ovoj
redovitoj pojavi pišu Lee & Santamarina (2005), a najnovije Bonal, Donohue &
McNally (2010).
Slika 3.41. Tipičan izgled primljenog vala u bender elementu unutar “bliskog polja”, 1-prvi otklon, 2-prvi maksimum izbočine, 3-povratak na nulu nakon prvog otklona, 4-
prvi glavni maksimum, (Bonal, Donohue & McNally, 2010)
Za pouzdano mjerenje malih deformacija jedan od najvećih problema ispitivaču je
odrediti vrijeme nailaska prvog vala. Stoga je potrebno da ispitivač detaljno poznaje
12
3
4

3. Krutost tla i metode mjerenja malih deformacija 69
teoriju interpretacijeke metode koju želi primjeniti kod ispitivanja. U rezultatima
mjerenja treba opisati sve čimbenike koji mogu utjecati na pouzdanost mjerenja bender
elemenata.
Jedna slikovita i poučna ilustracija osjetljivost postupka mjerenja vrlo malih
deformacija na uzorcima dana je u radu Žetko i dr. (2010). Za potrebe ispitivanja
neporemećenih uzoraka izvađenih sa lokacije budućeg mosta Pelješac provedena su
ispitivanja mjerenja vrlo malih deformacija tla u laboratoriju IGH. U radu se navodi da,
ako vrijeme nailaska prvog posmičnog vala odgovara jednoj od točaka (1,2,3 ili 4) sa
slike 3.41, onda nepouzdanost u vremena dolaska od 0.116 s, daje netočnost od oko
11 % kod izračuna brzine. Međutim kako modul posmika ovisi o kvadratu brzine, takva
razlika uzrokuje pogrešku ocjene modula posmika od 25 %. Nadalje, nepouzdanost od
0.177 s odgovara netočnosti od oko 18 % kod izračuna brzine, što kod modula
posmika ogovara pogrešci od 39 %.
Stoga, prema Lee. & Santarina (2005) i nekim drugim autorima koji su detaljnije
ispitivali ovu problematiku preporuča se za referentnu vrijednost uzeti točku 3
(povratak na nulu nakon prvog otklona).
Kako bi se izbjegla ovakva subjektivana nesigurnost u čitanju, danas sve više autora
vrijeme nailaska vala očitava pomoću računalnih programa, koji nailazak vala određuju
na temelju koralacije inicijalnog i dolaznog vala. Stoga sve dok se među istraživačima
ne utanači jedinstvenost u metodi očitanja, te se ista ne proglasi normom, sve će nas i
dalje kopkati činjenica “je li ovaj ili onaj pristup točniji”. Naravno, normiranjem se nebi
riješila zagonetka “što je stvarno točno”, ali bi univerzalnost pristupa pomoglo oko
jedinstvene interpretacije rezultata mjerenja.

3. Krutost tla i metode mjerenja malih deformacija 70
3.2.4. Mjerenje Hall efekt osjetilima (Hall Effect Local Strain Transducers)
Precizno određivanje malih deformacija, a time i krutosti tla pri jako malim
deformacijama od 0,01% do 0,001%, pa i manje, u troosnim uređajima sa
konvencionalnom (standardnom) opremom praktički je nemoguće. Stoga svaki troosni
uređaj koji se namjerava uporabiti u svrhu preciznog i točnog mjerenja malih
deformacija, se mora dodatno opremiti uređajima (osjetilima) koji će omogućiti takva
precizna mjerenja. Jedan od tih dodatnih uređaja je i Hall efekt osjetilo (eng. Hall Effect
Local Strain Tranducers)
Slika 3.42. Hall efekt osjetila za mjerenje osnih i radijalnih deformacija (laboratorijZavoda za geotehniku, Građevinski fakultet u Zagrebu)
Svaki konvencionalni troosni uređaj je opremljen mjeračima (mikrouricama)
pomaka klipa u odnosu na kapu, ali posredno preko vanjskog sklopa poluga. U tom
slučaju deformacija, odnosno pomak se očitava na mikrourici ili se preračunava preko
promjene volumena u cilindru crpke koja nameće tlak u klipu postolja ćelije. Mjerenje
deformacija, odnosno pomaka posredno preko mikrourice ili (još lošije) preko promjene
volumena u klipu ćelije je opterećeno nizom pogrešaka. Ako se deformaciju mjeri preko
promjene volumena tekućine u cilindru crpke kojom se upravlja pomak klipa, tada jako

3. Krutost tla i metode mjerenja malih deformacija 71
male promjene temperature, recimo, od 1 do 2 C, izazivaju promjenu volumena
tekućine u cilindrima čime se mijenja pozicija klipa postolja u ćeliji. Ovakva mjerenja
deformacija su strogo ograničena kako zbog termodinamičkih efekata, tako i zbog reda
veličine koja se može iščitati iz takvog načina mjerenja. S druge pak strane, ako se
mjerenje odvija preko mikrourice, tada se mjerenja opterećuju greškama prenosa
pozicije određenih sklopova uređaja (trenje klipa, deformacija brtvi, deformacije ležaja,
poroznih pločica,...itd.) pripisuju deformaciji uzorka. Ovakva mjerenja
konvencionalnom opremom su ograničena i zadovoljavaju određene postupke, za
određene redove veličina deformacija, obično najviše do 0,1 %. Sustav se može
poboljšati opremanjem troosnog uređaja sa mikrouricama novije generacije (optički
sustav) što veće točnosti, odnosno što veće rezolucije. Tako se danas mogu nabaviti
(jako skupe) mikrourice rezolucije do 0,1 m (Mitutoyo) sa malom greškom čitanja (0,3
%), ali one ipak mjere deformacije (pomake) preko sklopa uređaja, a ne izravno na
uzorku. Iz tog razloga većina rezultata mjerenja deformacija, na bazi konvencionalnih
troosnih pokusa su davala prividnu sliku o znatno manjim krutostima tla nego što se to
moglo zaključiti iz stvarnog ponašanja tla na terenu (Jardine, Burland, 1984).
Poznavajući ovaj problem, geotehničari su došli do spoznaje da bi se deformacije mogle
izravno mjeriti na uzorku. Tako su uz pomoć elektroničara razvijeni novi uređaji,
odnosno osjetilima koja se izravno postavljaju na uzorak i na taj način određuje
deformacijsko ponašanje samog uzorka.
Slika 3.43. Shema radijalnog Hall efekt osjetila (Piriyakula, 2006)

3. Krutost tla i metode mjerenja malih deformacija 72
Slika 3.44. Shema vertikalnog osnog Hall efekt osjetila (Clayton i dr., 1989)
Jedna od naprednijih metoda mjerenja malih deformacija izravno na uzorku je
mjerenje pomoću Hall efekt osjetila. Hall efekt osjetila su uređaji čija je namjena
mjerenje vrlo malih osnih i radijalnih deformacija izravno na uzorku. Otkriće "Hall
efekta" pripisuje se američkom fizičaru Edwin Herbert Hall-u (1879) po kojemu je i
nazvan Hall effect. Za vrijeme svog rada provodio je niz termoelektričnih istraživanja
na Harvardu, a napisao je niz knjiga iz fizike i laboratorijskih priručnika. On je otkrio
da se promjene izlaznog napona struje javljaju kao odgovor promjene (gustoće)
magnetskog polja koje je okomito na smjer toka struje. Naime, ako se metalne ili
poluvodičke pločice, kroz koje teče struja nalaze u magnetskom polju gdje su silnice
usmjerene okomito na ploču i tok struje, nosilac naboja će skrenut ploče tako da će se
proizvesti napon preko ploče u smjeru okomito na protok struje. Hall koeficijent se
definira kao omjer električnog induciranog polja za proizvodnju struje i primijenjene
gustoće magnetskog polja. Jedna vrlo važna osobina Hall efekta je da se razlike između
pozitivnog naboja kreću u jednom smjeru, a negativnog kreću u suprotnom smjeru. Hall

3. Krutost tla i metode mjerenja malih deformacija 73
efekt je ponudio prvi pravi dokaz da se električne struje u metalima provode pomoću
pokretnih elektrona, a ne protona. Hall Effect poluvodiči se široko koriste za mjerenje
gustoće magnetskog toka. Linearne verzije tih uređaja obično su A/D konverteri.
Slika 3.45. Shematski prikaz električne pojave “Hall efekta”(www.nktechnologies.com)
Primjenjući te spoznaje razvijena su osjetila za mjerenje malih deformacija na
uzroku pod nazivom Halla Effect Local Strain Tranducers. Osjetila se primijenjuju za
mjerenje vertikalne lokalne osne (axial) i radijalne (radial) deformacije uzorka u
troosnom uređaju. Prvu ozbiljnu primjenu Hall efekt osjetila u geotehničkim
laboratorijima uveo je Clayton, C. R. I. (1986) i njegove kolege na Sveučilištu Surrey.
On je dao veliki doprinos mjerenju malih deformacija izravno na uzorku metodom Hall
efekt osjetilima, koja se i danas uspješno primjenjuje. U radu pod naslovom Hall effect
instrumentation for stress and force measurements, Clayton & Khatrush (1986), opisane
su aplikacije laboratorijskog inženjerstva, te novi instrumenti za mjerenje sila,
normalnog i posmičnog naprezanja u geotehnici. U radu se navodi kako su ti novi
instrumenti po dizajnu slični postojećim dizajniranim „strain-gauge“ instrumenatima,
ali za razliku od navedenih koriste linearni izlaz Hall efekt senzora. Baza mjerenja u

3. Krutost tla i metode mjerenja malih deformacija 74
svim slučajevima je uzorak tla, odnosno pomak ili deformacija uzorka. Izvedba svakog
instrumenta se procjenjuje, i pokazuje se da se Hall efekt osjetila mogu lako ugraditi na
takav način da proizvode prihvatljive razine točnosti.
Slika 3.46. Shematski prikaz troosnog uređaja sa vertikalnim Hall efekt osjetilima(Clayton & Khatrush, 1986)
Tehnički podaci za Hall efekt osjetila tvtke GDS Instruments Ltd (2010) su:
raspon mjerenja (range): = 3.0 mm
rezolucija (resolution using 16 bit acquisition) 3.0 mm = < 0.1 m
točnost-pogreška (accuracy): 0.2 % za raspon preko 4mm, 0.3 % za raspon
preko 5.0 mm, i 0.4 % za raspon preko 6.0 mm
mjerna duljina osnog osjetila (udaljenost magneta i pikalice): 50.0 mm
težina radijalnog Hall efekt osjetila za promjere: 38 mm = 24 g, 70 mm = 46 g.
težina jednog osnog Hall efekt osjetila sa čipom = 16 g + 5 g = 21 g
tlak koji mogu izdržati u ćeliji: 1700 kPa

3. Krutost tla i metode mjerenja malih deformacija 75
Slika 3.47. Namještanje Hall efekt osjetila na uzorak tla u laboratoriju(Građevinski fakultet u Zagrebu)
Kao što je prikazano na Slici 3.47. na valjkasti uzorak tla, koji se prethodno obavije
u nepropusnu geomembranu, najprije se postavlja radijalno Hall efekt osjetilo centrično
na sredinu uzorka (prethodno se na membranu iscrta vertikalna os s kojom se osjetilo
poravnava). Učvršćenje Hall efekt osjetila se obavlja na dva načina, ljepljenjem ili
pribadanjem pomoću iglica izravno kroz membranu. Prema iskustvu u laboratoriju se
više koristi metoda ljepljenja elemenata, jer metodom pribadanja često dolazi do
mješanja porne vode iz uzorka i vode iz ćelije (perforiracijom membrana pušta vodu),
pa se provedba pokusa mora ponoviti. Ljepljenje se provodi pomoću brzovezujućih
ljepila (Bond-Ultra, Cyanofix extra, ...) poboljšane kvalitete otpornih na vlagu i visoke
tlakove. Nakon namještanja radijalnog Hall efekt osjetila postavljaju se vertikalna
(osna) Hall effekt osjetila. Vertikalna Hall efekt osjetila postavljaju se u paru, na sredini
uzorka tla, nasuprot jedan drugome. Vertikalno Hall efekt osjetilo, kao i horizontalno,
se sastoji od polugice koja na svom kraju ima pikalicu s magnetom i mjerne pločice po
kojoj magnet „kliže“ za vrijeme provedbe pokusa smicanja. Da bi se proces mjerenja
korektno obavio mjernu opremu Hall efekt osjetila potrebno je precizno najmestiti u
„mjerno područje“. To je dosta zahtjevan postupak, zašto treba imati dosta strpljenja i
kocentracije. Naime, potrebno je polugicu s pikalicom „ugoditi“, odnosno dovesti u
poziciju željenog offset područja na magnetskoj ploči, kako bi deformacije bile

3. Krutost tla i metode mjerenja malih deformacija 76
korektno izmjerene. Vertikalna Hall efekt osjetila imaju raspon mjernog područja od
3.0 mm i izvan toga nisu uporabljivi. Stoga proces namještanja osjetila zahtjeva
veliku vještinu (iskustvo) istraživača. Oba vertikalna Hall efekt osjetila kao i radijalno
su dizajnirani tako da njihova težina (legura aluminija) prilikom uranjanja u vodu se
djelomično poništi i ne stvara probleme (niti greške) prilikom mjerenja. Velika prednost
Hall efekt osjetila je u tome što se kod pokusa smicanja, s pomacima klipa većim od 3.0
mm pokus ne prekida već se slobodno nastavlja, a osjetila se „sama izbace“ iz mjernog
područja. Prekoračenjem pomaka preko mjernog područja osjetila se ne mogu uništiti
(kao na pr. LDT ili LVDT). Također, bez obzira na vrlo veliku osjetljivost mjernih
uređaja, oni se mogu višekratno uporabljivati u laboratorijskim pokusima.
Slika 3.48. Namještanje (ugađanje) vertikalnog Hall efekt osjetila u mjerno područje(Građevinski fakultet u Zagrebu)
Primjenom geofizičkih metoda određivanja posmične krutosti tla, mjerenjem brzine
posmičnih valova, dolazilo se do podataka da je krutost tla određena primjenom
geofizičkih metoda, znatno veća od one koja se dobije iz troosnog pokusa u
laboratoriju. To se dugo vremena pripisivalo načinu određivanja malih deformacija,

3. Krutost tla i metode mjerenja malih deformacija 77
odnosno krutosti tla. Tako se za module posmika određene geofizičkim metodama,
često pripisivao naziv kao „dinamička krutost“, i tretirana je različito od one određene u
laboratoriju za koju se pripisivao naziv „statička krutost“. Pojavom osjetila za mjerenje
malih deformacija izravno na uzorku povećala se točnost i rezolucija čitanja
deformacija na uzorku do reda veličine 0,001 %, pa i manje. Na tim deformacijama
uočava se znatno veća vrijednost modula posmika, koja se gotovo poklapa s
vrijednostima modula posmika određenog geofizičkim metodama. To sve upućuje na
potvrdu ispravnost uporabe geofizičkih metoda u određivanju modula posmika, te
činjenicu o sve manjoj razlici interpretacije tzv. „dinamičkog“ i „statičkog“ modula
posmika pri malim deformacijama, bez obzira kojom metodom on bio određen.
Slika 3.49. (a) Tipična konfiguracija Hall efekt osjetila, (b) čimbenici koji utječu naosjetljivost (Clayton & Khatrush, 1986)

3. Krutost tla i metode mjerenja malih deformacija 78
3.2.5. Mjerenje LDT osjetilima (Local Deformation Transducers)
Jedan od postupaka mjerenja malih deformacija izravno (lokalno) na uzorku je
postupak mjerenja pomoću LDT osjetila (eng. Local Deformation Transducer).
Postupak mjerenja je prvi puta primjenjen na Tokijskom Sveučilištu (University of
Tokyo) od strane dr. Goto-a i prof. Tatsuoka-e, te njihovih suradnika (Goto i dr. 1991),
koji se smatraju izumiteljima LDT osjetila za mjerenje lokalnih deformacija na uzorku
tla. Nakon njih LDT osjetila su se naglo počela primjenjivati u drugim geotehničkim
laboratorijima. Tako su modificiranu uporabu LDT osjetila koristili Dasari, G.R.,
Bolton, M.D., and Ng C.W.W.N, (1995) u istraživanju ponašanja uzoraka tla gline pri
statičkim i dinamičkim ispitivanjima. Autori navode postupak određivanja posmične
krutosti na uzorcima Gault gline pri vrlo malim vertikalnim deformacijama koje su
mjerene LDT osjetilima u troosnom uređaju. LDT osjetila su bila iznimno visoke
rezolucije 10-5 % i manje, što ilustrira Slika 3.50.
Slika 3.50. Odnos modula posmika i posmične deformacije za Gault glinu(Dasari, Bolton and Ng, 1995)
Prije nekoliko godina tehnika mjerenja lokalnih deformacija pomoću LDT osjetila,
primjenjena je u laboratoriju Zavoda za geotehniku na Građevinskom fakultetetu
Sveučilišta u Zagrebu. Prva mjerenja za potrebe umjeravanja i kalibracije sustava na
troosnom uređaju obavljena su prilikom ispitivanja deformacija na uzorcima kaolinske
gline, a zatim na uzorcima od gume (Zlatović i Szavits-Nossan, 1999). No najveću
primjenu i potvrdu metode mjerenja malih deformacija pomoću LDT osjetila na

3. Krutost tla i metode mjerenja malih deformacija 79
Građevinskom fakultatu u Zagrebu, obavljena je za potrebe izrade disertacije Matešić,
L. (2002). U disertaciji se navodi da su se u istraživanjima koristila dva istovrsna LDT
osjetila, jedan s oznakom LDT2, duljine 70 mm, i drugi s oznakom LDT3, duljine 53
mm. Oba LDT osjetila su služila za mjerenje vertikalne deformacije uzorka. Shemu
pozicioniranja vertikalnih LDT osjetila na uzorak prikazuje Slika 3.51.
Slika 3.51. Shema postavljanja vertikalnih LDT osjetila na uzorak tla(Matešić, 2002)
LDT osjetilo korišteno u laboratoriju Zavoda za Geotehniku Građevinskog fakulteta
Sveučilišta u Zagrebu, izrađeno je na Tokijskom Sveučilištu u Japanu, a sastoji se od:
tanke elastične trake fosforne bronce (debljine 0,2 mm i širine 3,5 mm); jednog para
tenzo traka spojenih u Wheatstonov most, čvrsto zalijepljenih na sredini trake po jedan
na svakoj strani; te tankih, mekanih i laganih vodiča koji ne opterećuju mjerni uređaj.
Smatra se da mjerilo LDT pri mjerenju izaziva najmanje poremećaje uzorka (Lo Presti i
dr. 1994). Detaljan opis teorije rada mjerila LDT pruža rad Goto i dr. (1991). Tenzo
trake i njihovi spojevi s vodičima su naponski izolirani zbog toga jer se mjerenja u
troosnoj ćeliji izvode pod vodom. Mjerilo LDT se postavlja na uzorak u savijenom
položaju, na način da se krajevi trake slobodno oslanjaju u ležištima. Ravnoteža mjerila
LDT u tom položaju je postignuta silom razupiranja savijene trake. Utjecaj sile
razupiranja na deformaciju uzorka se zanemaruje, odnosno smatra se da nema bitnog
utjecaja na deformaciju i rezultate. Postupkom deformiranja uzorka, udaljenost između
ležišta se mijenja, traka se savija, odnosno deformira i dolazi do promjene napona u

3. Krutost tla i metode mjerenja malih deformacija 80
Wheatstonovom mostu. Odnos promjene udaljenosti između ležišta i promjene napona
u Wheatstonovom mostu je nelinearan, i jedinstveno se može opisati polinomom
drugog stupnja (parabolom). Točnosti i rezolucija LDT osjetila ovisi o sustavu za
uređenje signala (pojačalu i A/D konverteru), ali je uobičajena oko 0,1 m, što
preračunato za uzorak visine 10 cm predstavlja 10-4 % vertikalne deformacije. Međutim
preporuča se da se za mjerno područje LDT osjetila uzima oko 2 % njegove dužine
(Hoque i dr. 1997, Okuyama i dr. 2003, HongNam and Koseki 2003, HongNam 2004,
Wicaksono i dr. 2003).
Slika 3.52. Shema postavljanja LDT osjetila na uzorku tla u toosnom uređaju(Wicaksono i dr., 2003)
Par ležišta potrebnih za postavljanje vertikalnih LDT osjetila na uzorak izrađuje se
od istovrsne trake kao LDT osjetilo, na način da se traka dužine cca 1 cm presavije
okomito na duljinu, gledano iz profila ležišta su u obliku slova L. Prije postavljanja na
uzorak, ležišta se postave u pomoćni etalon (držač), na način da se ugodi razmak ležišta.
Etalon (držač) se prethodno izbaždari u početno mjerno područje LDT osjetila. Ležišta
se postavljaju paralelno s vertikalnom osi koja se prethodno obilježi na gumenoj
membrani uzorka. Ugađanje razmaka ležišta izvodi se na način da se provjerava položaj
LDT osjetila, odnosno odgovara li razmak željenom položaju u mjernom području LDT
osjetila. Nakon ugađanja ležišta, vanjske plohe ležišta se premažu snažnim
brzovezujućim ljepilom, te se laganim pritiskom priljube na odabranu vertikalnu
izvodnicu cilindričnog uzorka. Pri postavljanju vertikalnih LDT osjetila u ležišta treba
paziti da ne dođe do dodira LDT osjetila i ljepila. Premda je ljepilo brzovezujuće,

3. Krutost tla i metode mjerenja malih deformacija 81
preporuča se nakon postavljanja LDT osjetila pričekati cca 60 min s ispitivanjem koja
uključuju mjerenje LDT osjetilima, kako bi se odvilo puzanje membrane izazvano
silom razupiranja LDT osjetila (Hoque i dr. 1997, HongNam and Koseki 2003).
Slika 3.53. Postavljanje LDT osjetila u tri smjera na velikom šupljem cilindričnomuzorku u troosnom uređaju (HongNam and Koseki, 2003)
Sustav za prikupljanje i uređenje signala sastoji se od PC računala i pojačala signala
koji je ujedno i AD converter (na pr. Spider-8) s odgovarajućim programom (na pr.
Catman 2.0, proizvođač Hottinger Baldwin Messtechnik). Pojačalo (Spider-8) napaja
oba LDT osjetila istosmjernom strujom napona 3V, prima i filtrira analogni signal s
LDT osjetila, te ga pretvara u digitalni, i na upit šalje računalu. Sustav za uređenje i
prikupljanje signala za oba vertikalna LDT osjetila je takav da je rezolucijska vrijednost

3. Krutost tla i metode mjerenja malih deformacija 82
RV=0.00012 [mV/V], što omogućava rezoluciju mjerila LDT od oko 0,1 m, što za
uzorak visine od 100 mm, daje vrijednost vertikalne deformacije od 10-4 %.
Prema radovima Goto i dr. (1991) i Hoque i dr. (1997) izvedeno je niz ispitivanja
LDT osjetilima s ciljem određivanja kalibracijskih svojstava, tj. karakterističnog odnosa
promjene napona i promjene udaljenosti krajeva LDT osjetila, te određivanja stabilnosti
i pripadajuće pogreške.
Postupak kalibracije, odnosno određivanje karakterističnog odnosa promjene
veličine napona i promjene udaljenosti krajeva LDT osjetila izvedeno je u više navrata.
Postupak se provodi na kalibracijskom stolu na način da se na mikrometru prirede
odgovarajuća ležišta u koja se postavlja LDT osjetilo. Mikrometar se u jako malim
koracima (preko mikro vijka) pomiče što uvjetuje i savijanje LDT osjetila, te nakon
svakog koraka očitava vrijednost pomaka na mikrourici i promjena napona LDT
osjetila. Rezolucije mikrourice je 1 m, a rezolucija LDT mjerila je 0.00012 mV/V.
Mikrourica se pomiče u jednom smjeru sve do granice mjernog područja LDT mjerila, a
nakon toga se smjer pomicanja okreće. Primjer rezultata kalibracije LDT 2 osjetila,
pruža Slika 3.54.
Slika 3.54. Primjer određivanja kalibracijskih svojstava LDT osjetila(Matešić, 2002)

3. Krutost tla i metode mjerenja malih deformacija 83
Za svako mjerenje određen je karakteristični odnos promjene napona/pomaka, i to u
obliku polinoma drugog reda, (KLDT=a0+a1*xLDT+a2*xLDT2). Pri određivanju
karakterističnog odnosa odabrana su samo mjerenja u kojima su očitanja s LDT osjetila
veća od -0.3 [mV/V]. Temeljem karakterističnih odnosa svih mjerenja za isto LDT
osjetilo proračunat je prosječan karakterističan odnos koji je usvojen u ispitivanjima.
Prosječan karakterističan odnos očitanja LDT mjerila, xLDT, izraženog u mV/V i
relativnog pomaka, KLDT , izraženog u m dobivena prosječna krivulja za LDT2 osjetilo
je:
KLDT = 663,424*xLDT + 543,438* xLDT2
a za LDT3 osjetilo je:
KLDT = 225,700*xLDT + 235.942 * xLDT2
Ocjena stabilnosti mjerenja i određivanje pripadajuće pogreške za oba LDT osjetila
donesena je temeljem rezultata više kontinuiranih očitavanja LDT osjetila u
nepomičnom položaju u vodi. Mjerodavna očitavanja trajala su 2 min i razlikovala su se
u razmaku krajeva, odnosno zakrivljenosti mjerila LDT osjetila. Osjetila su bila
potopljena u vodi, jer se pri ispitivanjima u troosnom uređaju LDT osjetilo zajedno s
uzorkom nalazilo u vodi. Primjećuje se da promjena temperature vode u ćeliji znatno
utječe na rezultate mjerenja. Prema istraživanjima, Matešić (2002) navodi da je utjecaj
promjene temperatujre značajan, pa preporuča da oscilacije temperature vode nesmiju
prelaziti vrijednost iznad 0.5 C. Na taj način se može objasniti smirivanje oscilacija u
vodi, zato što je voda u odnosu na zrak temperaturno inertna sredina. Početne oscilacije
mogu se objasniti deformiranjem LDT mjerila pri dostizanju termičke ravnoteže. Može
se primijetiti da je oscilacija očitanja LDT mjerila 0.00012 mV/V, što odgovara i
njegovoj rezoluciji. Ista oscilacija za oba LDT osjetila utvrđena je obradom rezultata
svih mjerenja u raznim položajima. Stoga je pogreška mjerenja za oba LDT osjetila,
usvojena sa 0.00012 [mV/V]. Primjer rezultata mjerenja stabilnosti u vodi daje Slika
3.55.

3. Krutost tla i metode mjerenja malih deformacija 84
Slika 3.55. Primjer određivanja stabilnosti očitanja LDT osjetila u vodi(Matešić, 2002)
Nadalje, u radu se detaljno navodi način izračuna modula posmika Gs i relativne
posmične deformacije pri monotonom nedreniranom smicanju od vrlo malih
deformacija do sloma u toosnom uređaju.
Slika 3.56. Aprosimirana krivulja i mjereni podaci za uzorak P02 preko LDT osjetila(Matešić, 2002)
Kao i svaka druga mjerna oprema, LDT osjetila imaju svojih dobrih i loših
karakteristika. Dobre karakteristike su što je konstrukcija osjetila izuzetno lagana i
postojana na ispitivanja pod vodom, te omogućavaju pouzdana mjerenja izuzetno malih
deformacija reda veličini 10-4 % i manje. Međutim imaju jedan veliki nedostatak kod
primjene u troosnoj ćeliji, a to je da se prilikom smicanja mogu trajno oštetiti. Naime

3. Krutost tla i metode mjerenja malih deformacija 85
zbog svog načina pričvršćenja na uzorak, kao napeti luk, (vidi Sliku 3.51 i 3.52) kod
nametanja opterećenja konsolidacije i tlačnog smicanja javljaju se vertikalne
deformacije, pa se traka LDT osjetila sve više lučno savija. Savijanje trake LDT osjetila
nesmje preći mjerno područje LDT osjetila, koje obično iznosi do 2 % duljine trake
(obično 1-2 mm). Međutim ako se želi provoditi pokus sa smicanjem do sloma,
potrebno je ostvarivati veće deformacije od mjernog područja LDT osjetila. Stoga
daljnim povećavanjem deformacija traka LDT osjetila se sve više savija preko mjernog
područja čime se trajno oštećuje i nije više za uporabu. Stoga se pokus obično prekida
(otpuštaju se tlakovi) u trenutku dosezanja mjernog područja, a LDT osjetila se
uklanjaju sa uzorka, a zatim se pokus ponovno nastavlja (ćelija puni vodom i nametaju
tlakovi). Na ovaj način smicanje nije kontinuirano, pa ovaj prekid u pokusu često
izaziva kontraverze kod autora u interpretaciji rezultata. Najveći problem se javlja kod
mekanih glina i rahlih pijesaka, jer se još kod konsolidacije uzorka, redovito javljaju
deformacije veće od mjernog područja LDT osjetila. Stoga se koriste razne tehnike
uklanjanja LDT osjetila u trenutku dosezanja mjernog područja, ali bez prekida
smicanja. Npr. ugrađuju se tzv. “udice” sa laganim nitima kojima se trake LDT osjetila
uklone iz ležišta tijekom smicanja, potezanjem niti (udice) izvan ćelije.
Slika 3.57. Primjer interpretacije rezultata mjerenja LDT osjetilom u troosnom pokusu(Magbool, Sato & Koseki, 2007)

3. Krutost tla i metode mjerenja malih deformacija 86
3.2.6. Mjerenje LVDT osjetilima (Linear Variable Differential Transducer)
Svaki troosni uređaj koji se namjerava uporabiti u svrhu preciznog i točnog mjerenja
malih deformacija, dodatno je opremljen osjetilima i uređajima koji će omogućiti takva
precizna mjerenja. Jedan od tih uređaja je i LVDT osjetilo, izvorni naziv Linear
Variable Differential Transducer. LVDT osjetilo se primjenjuje u mjernoj tehnici već
više od 40 godina. Dugo godina (preko 30) LVDT osjetilo se primjenjivalo za mjerenje
pomaka u troosnoj ćeliji. Međutim ta mjerenja su podrazumjevala mjerenja pomaka
izvan ćelije posredno preko sustava poluga, a ne mjerenja na uzorku. Početkom 80-tih
godina, razvojem tehnologije, počela su se rabiti za mjerenje deformacija izravno
lokalno na uzorku. Za tu potrebu bilo je potrebno posebno dizajnirati takva „mala“
LVDT osjetila koja će se prikačiti na uzorak a da neće imati utjecaja na rezultate
mjerenja tijekom smicanja. Najveći razvoj dala je tvrtka RDP Electronics Ltd iz
Wolverhamptona, (UK), koja se smatra pionirom razvoja LVDT osjetila, koja se
primjenjuju u troosnim uređajima pri visokim tlakovima vode i ulja. U troosnim
ćelijama za ispitivanje ponašanja stijena koristi se tehničko ulje kao medij, pa ćelijski
tlakovi znaju biti i do 200 MPa. Troosni uređaj s ćelijom Bishop i Wesley (1975),
obično su kapaciteta do 2000 kPa što se smatra potpuno dostatnim za konvencionalna i
znanstvena istraživanja tla, gline i pijeska.
LVDT osjetilo ili senzor se u stručnoj elektroničkoj literaturi naziva još i LVDT
pretvornik, odnosno linearni varijabilni diferencijalni transformator (Slika 3.58.).
Slika 3.58. Ilustracija konstrukcije LVDT osjetila (pretvornika)

3. Krutost tla i metode mjerenja malih deformacija 87
LVDT osjetila se sastoje od tri zavojnice: P (primar), S1 i S2 (sekundari).
Amplituda induciranog napona ovisi o položaju pomične magnetske jezgre (armature).
Sekundari su spojeni u protuspoju, odnosno kad je jezgra (armatura) u „sredini“ to je
nulti (0) položaj, pa je inducirani napon jedank nuli, U1 + U2 = 0. Pomicanjem jezgre
(armature) mijenja se međuinduktivitet P/S1, odnosno P/S2, o čemu ovisi inducirani
napon U1 i U2, što ilustrira Slika 3.59.
Slika 3.59. Elektoro-fizikalne osnove LVDT osjetila
Za uspješnu primjenu mjerenja LVDT osjetilima, potrebno je iste spojiti na
odgovarajuća elektronička pojačala signala sa upravljajućim software-om.. Sustav za
prikupljanje i uređenje signala sastoji se od PC računala i pojačala signala koji je ujedno
i A/D converter. Pojačalo napaja LVDT osjetila istosmjernom strujom napona (najčešće
do 10 V), prima i filtrira analogni signal sa LVDT osjetila, te ga pretvara u digitalni.
Pored kvalitete samog LVDT osjetila o kvaliteti sustava za uređenje signala ovisi i
rezolucijska vrijednost LVDT osjetila, koja se kreće i do 0.027 m (Clayton &
Heymann, 2001). U tom radu Clayton & Haymann (2001) navode da su lokalne
deformacije uzorka mjerene pomoću LVDT osjetila. Osjetilo je prethodno kalibrirano
pomoću Fabry -PeÂrot laser interferometara, te su očitali pomake visoke točnosti što je
davalo vrijednost osne deformacije uzorka reda 10-4 %.

3. Krutost tla i metode mjerenja malih deformacija 88
Slika 3.60. Princip rada LVDT osjetila (RDP Electronics Ltd)
Prednosti LVDT osjetila su:
nema fizičkog kontakta duž osjetilnog elementa
visoka točnost i ponovljivost
točnost je ograničena samo osjetljivošću elektoničkog sklopa
mogućnost korištenja pri vrlo visokom tlakovima, temeperaturama, radijaciji
višekratna uporaba i kvalitetna vodotjesna izvedba
Nedostaci LVDT osjetila su:
dinamička mjerenja ograničena su rezononantnom frekvencijom LVDT
mogućnost oštećenja pri prekoračenju mjernog područja kod tlačnog
naprezanja u troosnoj ćeliji
Slika 3.61. Razni oblici LVDT osjetila (RDP Electronics Ltd)

3. Krutost tla i metode mjerenja malih deformacija 89
Precizno određivanje krutosti tla teško je postići kroz rutinska (konvencionalna)
laboratorijska ispitivanja (mjerenja). Ovdje se prvenstveno misli na konvencionalno
određivanje deformacija uzorka tla u troosnoj ćeliji mjerenjem pomaka koje uključuje
veliki broj vanjskih pokreta sklopova troosnog uređaja (deformiranje brtvila, trenje
ležajeva, poroznih pločica i sl.). Stoga se za mjerenje malih deformacija obvezno
primjenjuje postupak izravnog mjerenja deformacija na uzorku (lokalno mjerenje
deformacija). Na taj način sve moguće pogreške mjerenja deformacija preko kape ili
baze ćelije se izbjegavaju. Međutim mjerenje deformacija izravno na uzorku opterećeno
je pogreškama koje proizlaze iz tehničkih karakteristika mjerne opreme osjetila,
odnosno zbog ograničene (limitirane) rezolucije i mjernog područja. Međutim takva
ograničenja nikako ne mogu biti pogreške koje imaju bitan utjecaj na rezultate i
interpretaciju mjerenja. Ono što je važno, pokazuje se tedencija povećanja krutosti tla sa
smanjenjem veličine deformacija. Drugim riječima deformacije mjerene
konvencionalnim načinom u troosnim pokusima daju prividno daleko manje krutosti
tla, od onih koje se mogu zaključiti iz stvarnog ponašanja tla (Jardine, Symes i Burland
1984).
Slika 3.62. Primjer radijalnog i osnih LVDT osjetila namjenjenih za valjkaste uzorke tla,izvorni naziv On-Specimen Transducers (Wykeham Farrance, 2009)
LVDT osjetila služe za mjerenje malih osnih i radijalnih deformacija izravno na
uzorku. Poznavajući sile koje su dovele do deformacija mogu se proračunati i
naprezanja u smjeru glavnih osi (1, 2 i 3) i vrijednosti posmičnih deformacija ().

3. Krutost tla i metode mjerenja malih deformacija 90
Kao što je prikazano na Slici. 3.63. na valjkasti uzorak tla, koji se prethodno obavije
u nepropusnu geomembranu, najprije se postavlja radijalno LVDT osjetilo centrično na
sredinu uzorka (prethodno se na membranu iscrta srednja os s kojom se osjetilo
poravnava). Učvršćenje stopica LVDT osjetila se obavlja ljepljenjem ili pridržavanjem
gumenim trakama napravljenim izrezivanjem (viška) gumene membrane koja se koriti i
za uzorak. Ako se primjenjuje ljepljenje, tada se pričvršćenje stopica obavlja pomoću
brzovezujućih ljepila (Bond-Ultra, Cyanofix extra, ...) poboljšanih kvaliteta otpornih na
vodu i visoke tlakove. U slučaju ljepljenja stopica, odmah nakon pokusa treba očistiti
stopice od ostataka ljepila radi daljnje uporabe. Nakon namještanja stopica i klješta
radijalnog LVDT osjetila, u predviđene utore postavlja se radijalno LVDT osjetilo. Po
sličnom principu postavljaju se i vertikalna LVDT osjetila. Vertikalna LVDT osjetila
postavljaju se u paru, na sredini uzorka, nasuprot jedan drugome. Da bi se proces
mjerenja korektno obavio LVDT osjetila potrebno je precizno najmestiti u „mjerno
područje“. Za to nam služi distancer za fiksiranje, što prikazuje Slika 3.63.
Slika 3.63. Primjer instalacije radijalnog i osnog LVDT osjetila na uzorku(GDS instruments Ltd, 2009)
Vertikalna LVDT osjetila imaju raspon mjernog područja od 2,50 mm ili 5,00
mm (ovisno o tipu LVDT-a), pa izvan toga nisu uporabljivi. Oba vertikalna LVDT
osjetila kao i radijalo su dizajnirani tako da se njihova težina (legura aluminija) prilikom
Distancer za fiksiranje

3. Krutost tla i metode mjerenja malih deformacija 91
uranjanja u vodu, djelomično poništi i ne stvara probleme (niti greške) prilikom
mjerenja. Nedostatak LVDT osjetila je u tome što se kod pokusa tlačnog smicanja, s
vertikalnim pomacima većim od mjernog područja, osjetila mogu trajno oštetiti.
Prije uporabe svako LVDT osjetilo je potrebno kalibrirati za mjerno područje
izlaznog napona. Postupak se provodi kalibracijskim uređajem na kalibracijskom stolu
sa mikrometrom (obično Mitutoyo rezolucije 1,0 m). Mikrometar se u jako malim
koracima (preko mikro vijka) pomiče što uvjetuje i promjenu pozicije armatrure
(uvlačenja ili izvlačenja) LVDT osjetila, te nakon svakog koraka očitava vrijednost
pomaka na mikrourici i promjena napona na pojačalu LVDT osjetila (Slika 3.64.)
Slika 3.64. Uređaj za kalibraciju LVDT osjetila prije uporabe(Wykeham Farrance Ltd)
Tehnički podaci za LVDT osjetila tvtke GDS Instruments Ltd (2009) su:
raspon mjerenja (range): = 2.5 mm ili 5.0 mm
rezolucija (resolution using 16 bit acquisition) 2.5 mm = < 0,1 m,
5.0 mm = < 0,2 m
točnost-pogreška (accuracy): 0.1 % za raspon do 5.0 mm
mjerna duljina osnog osjetila (udaljenost držača): 50.0 – 70.0 mm
težina radijalnog LVDT osjetila za promjere: 70 mm = 74 g.
težina jednog osnog LVDT osjetila = 20 g
tlak koji mogu izdržati u ćeliji s vodom : 3500 kPa, s uljem 200 MPa

3. Krutost tla i metode mjerenja malih deformacija 92
3.3. Mjerenje krutosti tla na terenu
3.3.1. Mjerenje seizmičkom refrakcijom
Jedna od geofizičkih metoda mjerenja, odnosno određivanja krutosti tla je seizmička
refrakcija. To je metoda ispitivanja tla koja spada u tzv. nerazorne metode jer se izvodi
bez poremećaja uzorka tijekom ispitivanja. Vrlo je pogodna metoda jer se radi izravno
na terenu, pa joj je prednost što je vrlo brza, efikasna, te uz ograničene uvjete pouzdana.
Seizmička refrakcija spada u ne invazivnu geofizičku metodu koja se vrlo često
primjenjuje za terensko istraživanje dinamičkog ponašanja tla. Bazira se na mjerenju
vremena širenja elastičnih seizmičkih valova, od izvora (pobude) do geofona, kroz tlo.
Sama refrakcija se označava kao promjena smjera vala pri prelasku iz jedne vrste tla
(medija) u drugi.
Pobuda ili izvor seizmičkog vala je dinamičko opterećenje na površini tla (udar
čekića ili čvrstog predmeta). Valovi se reflektiraju i lome na granicama geo-materijala,
čija je različitost određena promjenama u njihovoj gustoći, deformacijskim svojstvima,
odnosno krutostima tla. Pouzdanost interpretacije rezultata mjerenja ovisi i o
mogućnosti pojave slojeva veće brzine iznad slojeva manje seizmičke brzine. Val se
može definirati i kao poremećaj koji putuje kroz medij i prenosi energiju tog
poremećaja.
Seizmička refrakcija je metoda mjerenja vremena prvih nailazaka elastičnih valova
koji se nastoje širiti kroz slojeve većih seizmičkih brzina. Brzina vala i dubina svakog
sloja tla, mogu se odrediti uz uvjet konstantne progresije seizmičke impedancije s
dubinom istraživanja. U provedbi te metode nastoji se precizno mjeriti vrijeme nailaska
volumnog seizmičkog vala. Današnje se metode interpretacije temelje na projekcijama
širenja valnih fronti. Osnova tih metoda je konstrukcija hipotetske putanje širenja
seizmičkog poremećaja kroz geomedij za svaki primljeni signal koji stigne do geofona.
Vremena širenja kroz pojedine slojeve, kao i brzine u tim slojevima se optimiziraju
prema snimljenom signalu, a konstruirana pretpostavljena putanja se prilagođava prema
mjerenim vrijednostima. Postupak se ponavlja dok se ne postigne zadovoljavajuća
aproksimacija, pa se potom odnos vremena i brzine konvertira u vrijednosti dubine.

3. Krutost tla i metode mjerenja malih deformacija 93
Obzirom na granične uvjete, mogu se promatrati i analizirati seizmički valovi u
neograničenoj elastičnoj sredini i valovi u blizini granice elastičnog poluprostora
(površinski valovi). U neograničenoj elastičnoj sredini seizmički valovi javljaju se u
dva oblika, kao: P valovi - uzdužni kompresijski (dilatacijski - kontrakcijski) i S valovi
– poprečni (posmični - distorzijski) što prikazuje Slika 3.65.
Slika 3.65. Prikaz gibanja čestica u odnosu na smjer širenja kod uzdužnih P valova i
posmičnih S valova (Braile, 2006)
Seizmički val izazvan pobudom na površini terena širi se kroz prostor promatranog
geomedija do niza geofona, raspoređenih na odrenenim razmacima duž orijentiranog
pravca - refrakcijskog profila. (Slika 3.66.).
Slika 3.66. Skica postavljenog profila seizmičke refrakcije

3. Krutost tla i metode mjerenja malih deformacija 94
Uzdužni P-valovi imaju veću brzinu i stižu ranije do geofona, a uglavnom
prekrivaju i zasjenjuju nailazak kasnijih posmičnih S valova. Uzdužni P valovi su
longitudinalni kao valovi zvuka, dok su S valovi transverzalni i polarizirani kao
elektromagnetski valovi. P valovi izazivaju progresivna i regresivna gibanja čestica na
pravcu širenja, opisuju promjenu volumena medija, te imaju najveću brzinu širenja i
posebno su značajni za seizmička istraživanja. S valovi nastoje promijeniti oblik
strukture medija kroz koji se šire, djelujući posmično. Svojstveni su za čvrste
geomedije, koji imaju posmičnu čvrstoću, pa su značajni za seizmička istraživanja tla,
odnosno u geotehnici.
U praksi je vrlo teško istovremeno determinirati nailazak P i S vala, odnosno na
istom zapisu seizmičkog poremećaja, čiji je izvor po obliku kompresijski, točno
razlučiti vrijeme nailaska posmičnog vala. Detekcija nailazaka prvih poremećaja na
nizu postavljenih geofona se uvijek odnosi na direktan val ili na refraktirani val. Ta
činjenica usmjerava pažnju istraživanja samo na zapažanje prvih nailazaka seizmičke
energije, pa se odnos udaljenosti izvora i geofona i vremena nailazaka može iskoristiti
za interpretaciju dubine refraktorskih slojeva. Takav princip se uspješno može
primijeniti samo za relativno jednostavne potpovršinske uvjete. Za složenije uvjete se
koriste metode u kojima se bilježi i vrijeme kašnjenja vala (Delay Time). To vrijeme
predstavlja razliku vremena širenja vala kroz medij pod kutom totalne refleksije i
vremena potrebnog da val prijeđe udaljenost jednaku projekciji te putanje na refraktor.
Slika 3.67. Princip mjerenja seizmičkom refrakcijom (Gazdek, 2003)

3. Krutost tla i metode mjerenja malih deformacija 95
Primjena seizmičkih metoda u istraživanju i određivanju posmične čvrstoće
geomedija odnosno tla, leži u ključnoj činjenici da je brzina poprečnog, odnosno
posmičnog vala upravo ovisna o posmičnoj čvrstoći, dok brzina uzdužnog vala ovisi o
tlačnoj čvrstoći. Analizom P i S valova mogu se odrediti dinamičke konstante
elastičnosti nakog materijala (tla ili stijene), ali se također može uspostaviti i određena
razlika između različitih geomaterijala, koji imaju iste ili slične brzine uzdužnih valova.
Na temelju poznate gustoće uzorka i izmjerene brzine širenja valova u uzorku, mogu se
odrediti početni posmični modul G0 i Young-ov modul elastičnosti E.
20 svG ⋅= ρ (3.19)
2
pvE ⋅= ρ (3.20)
gdje su
vs brzina posmičnog vala u uzorku (S-vala)
vp brzina uzdužnog vala u uzorku (P-vala)
ρ gustoća uzorka
Tablica 3.2 Prosječano izmjerene brzine P i S valova u pojedinim geomedijima
Geomedij
Brzina P vala
(m/s)
Brzina S vala
(m/s)
Gustoća
(Mg/m3)
Zrak 340 - -
Čista voda 1450 -1510 - 1.00
Riječna i jezerska voda 1430 - 1680 - -
Morska voda 1460 - 1530 - -
Površinski materijal 300 - 600 100 - 300 -
Granit 4000 - 6100 2150 - 3350 2.67
Gabro 6550 3450 2.98
Bazalt 5600 3050 3.00
Dijabaz 5500 - 7000 3000 - 4500 3.00
Pješčenjak 1800 - 4000 915 - 3000 2.45
Šejl 2500 - 4250 1000 - 3000 2.60
Vapnenac 2000 - 6100 1800 - 3800 2.65
Glina 1100 - 2500 580 1.40
Pijesak, šljunak 300 - 800 100 - 500 1.70
Pijesak, šljunak (mokri) 1500 - 2700 - 1.93
Lapori 1800 - 3900 1050 - 2300 2.35

3. Krutost tla i metode mjerenja malih deformacija 96
3.3.2. Mjerenje metodom Cross-Hole
Geofizičkih metoda ispitivanja tla za koju se smatra da je jedna od najpouzdanijih za
izravno određivanje početnog modula posmika G0 na terenu. Pošto se metoda
primjenjuje za mjerenje brzine seizmičkog vala (brzine zvuka) između dviju bušotina,
često se u praksi ta metoda poistovjećuje s tim nazivom (brzina zvuka između
bušotina). Seizmička energija generira se u jednoj bušotini (mehaničkim valom ili
eksplozivom) i mjeri se vrijeme potrebno da seizmički val stigne do druge bušotine. U
drugoj bušotini nalazi se geofon s osciloskopom koji bilježi vrijeme nailaska vala. Uz
pretpostavku da je tlo izotropni elastični kontinuum, te da se posmični val širi
pravocrtno između izvora i geofona, može se odrediti brzina širenja valova. Pozicija
izvora (pobude) i geofona treba postaviti na približno istu razinu (dubinu) u bošotinama.
Na temelju izmjerenih brzina širenja vala iz izraza (3.19) i (3.20) mogu se odreditit
početni modul posmika G0 i Young-ov modul elastičnosti E. Postupak izvedbe i
mjerenja detaljno opisuju Stokoe i Woods (1972) i Michalopoulos et al. (1979) gdje se
na poznati način, prethodno opisan, dobije početni posmični modul G0.
Slika 3.68. Princip mjerenja Cross-Hole metodom (Gazdek, 2003)

3. Krutost tla i metode mjerenja malih deformacija 97
Kao i sve druge geofizičke metode, tako i Cross-Hole metoda ima određene
pretpostavke i ograničenja za uspješnu primjenu. Uspješnost primjene metode Cross-
Holle ovisi o sljedećim čimbenicima:
• Seizmička energija izvora (pobude) mora biti učinkovita za generiranje
posmičnih valova, pri čemu se pojava uzdužnih valova smatra smetnjom
• Za ispitivanje su potrebne najmanje dvije bušotine iste dubine
• Tri ili više bušotina povećavaju pouzdanost primjene Cross-Hole metode
• Geofoni u prijemnoj bušotini trebaju imati primjereni frekvencijski odziv, i
trebaju biti orijentirani u smjeru oscilacije čestica medija
• Za preciznija mjerenja pozicija izvora vala (pobude) u jednoj bušotini treba biti
na istoj razini kao i geofon u drugoj bušotini
• Prirubljenost, odnosno kontakt geofona s geomedijem mora osigurati prijenos
seizmičke energije sa zida bušotine na geofone
Vrijeme nailaska S-vala može se mjeriti digitalnom seizmičkom aparaturom
direktno ili indirektno. Direktnim mjerenjem vremena odrenuje se najkraće vrijeme
nailaska S-vala do geofona, dok se indirektnim mjerenjem vrijeme nailaska određuje
funkcijom korelacije snimljenog vala u dvije prijemne bušotine. U tom slučaju, razlika
vremena prolaska seizmičkog vala između dviju prijemnih bušotina treba odgovarati
omjeru njihove udaljenosti i brzine prostiranja vala od izvora do obje bušotine. Funkcija
korelacije je obično definirana u frekventnoj domeni, u kojoj je vrijeme funkcija
gustoće frekventnog spektra vala.

3. Krutost tla i metode mjerenja malih deformacija 98
3.3.3. Mjerenje metodom Down-Hole i Up Hole
Metode Down-Hole i Up-Hole slične su metodi Cross-Hole, ali se razlikuju kako u
izvođenju tako i u interpretaciji rezultata. Jedinstveno za obje metode Down-Hole i Up-
Hole je, da se izvode u jednoj te istoj bušotini, za razliku od Cross-Hole metode koja za
svoju primjenu treba barem dvije bušotine. Stoga su ove metode znatno ekonomičnije u
odnosu na Cross-Hole, jer je potrebna samo jedna bušotina, koja se u pravilu koristi i za
uzorkovanje jezgre nabušenog materijala (tla). Down-Hole metoda i Up-Hole metoda je
(seizmička) geofizička metoda koja omogućuje direktno mjerenje intervalnih brzina
elastičnih valova duž bušotine. Naime, kod primjene ovih metoda teško se može
eksplicitno govoriti o seizmičkim brzinama pojedinog sloja, pa se stoga uvodi pojam
intervalne brzine, (Luna & Jadi, 2000).
Slika 3.69. Shematski prikaz mjerenja, lijevo-Down-Hole, desno Up-Hole
(Gazdek, 2003)
Kod Down-Hole metode za izvor vala (pobudu) obično se uporablja udarac (tvrdim
predmetom) čekićem po metalnoj ploči koja se nalazi na tlu uz ušće ili u neposrednoj
blizini ušća bušotine. Na taj način valni izvor generira energiju poremećaja s površine
(niz bušotinu) na određenoj udaljenosti od ušća bušotine. U bušotinu se smješta jedan
geofon, ili niz od više geofona po dubini. Kada se koristi samo jedan geofon, tada je val
(najčešće) trokomponentan. Položaj geofona je određen njegovom relativnom dubinom
u odnosu na ušće bušotine i azimut. Za isti položaj geofona mjeri se vrijeme nailaska P-

3. Krutost tla i metode mjerenja malih deformacija 99
ili S-vala s jednog ili više položaja izvora. Za različite položaje geofona definirane su
različite intervalne brzine.
Kod Up-Hole metoda izvor seizmičkog vala (pobuda) smješta se u bušotinu, a jedan
ili više (niz) geofona se postavlja na površinu. Stoga se može reći da Up-Hole metoda
predstavlja inverziju Down-Hole metodu u odnosu na poziciju izvora i smjer valova (uz
bušotinu). Geofoni se mogu postaljati i u bušotinu iznad izvora vala, te se zajedno
premještaju duž bušotine. Kod dubljih bušotina češće se koristi Up-Hole metoda, u tom
slučaju za izvor vala (pobudu) u bušotinu se stavlja eksploziv. Primjenjivost Up-Hole
metode sputava upotreba složenijeg generatora valova, koji mora osigurati dovoljnu
razinu seizmičke energije. Iz brzine širenja valova u uzorku tla moguće je odrediti
posmični modul uzorka tla pomoću poznatog izraza (3.19)
Slika 3.70. Shematizirana ilustracija mjerenja (http://geosystems.ce.gatech.edu)
Prednost u odnosu na (seizmičku) refrakcijsku metodu se iskazuje u mogućnosti
određivanja intervalnih brzina, odnosno i u formacijama koje imaju inverzni raspored
seizmičkih brzina sa dubinom manjih brzina tanjih slojeva, koji se nalaze između
slojeva većih brzina, (u tzv. slijepoj refrakcijskoj zoni). Uvjet je da su intervali između
geofona u bušotini dovoljno mali. Osim toga, detekcija prvog nailaska S-vala, kojeg
prekriva P-val, može se sa sigurnošću provesti promjenom polariteta izvora, pri čemu
posmični val mijenja fazu, a kompresijski val ostaje gotovo nepromijenjen. To je vrlo
teško postići kod Up-Hole metode, pa se najčešće generira P-val.

3. Krutost tla i metode mjerenja malih deformacija 100
3.3.4. Mjerenje spektralnom analizom površinskih valova SASW
U spektralnoj se analizi površinskih valova (SASW – Spectral Analysis of Surface
Wawes), pretpostavlja da se sustav koji ispitujemo sastoji od niza homogenih slojeva
konstantne debljine (Woods 1978, Nazarian i Stokoe 1983.). Ovom metodom mjeri se
brzina širenja posmičnih valova u tlu. Iz brzine širenja valova u tlu moguće je odrediti
posmični modul tla pomoću poznatog izraza (3.19). Izraz vrijedi uz pretpostavku da je
tlo izotropno, lokalno homogeno i linearno elastično. Uvjet linearne elastičnosti
približno je zadovoljen kod postojeće metode utvrđivanja brzine posmičnih valova na
terenu, gdje je amplituda deformacija vrlo mala, pa se tlo ponaša linearno elastično.
Metoda spektralne analize površinskih valova (SASW) se razvila iz tehnike
kontinuiranog (Steady-State) mjerenja modula posmika in situ. SASW metoda doživjela
je procvat sredinom osamdesetih godina sa porastom digitalne tehnologije. Na bazi
metode SASW (Spectral Analysis of Surface Waves) razvila se nova seizmička metoda
nazvana MASW (Multichannel Analysis of Surface Waves), koja je preuzela pristup koji
se već koristio u refleksijskoj i refrakcijskoj seizmici sa više prijamnika (24 ili više).
Izazivanjem seizmičkih valova u beskonačnom, homogenom, izotropnom mediju
javljaju se samo P i S ili prostorni valovi. Kada se medij ne prostire u beskonačnost u
svim smjerovima mogu se izazvati i druge vrste valova. Ti se valovi nazivaju površinski
valovi jer se šire po površini zemlje (ili u neposrednoj blizini površine), dok se
prostorni valovi šire kroz cijelo tijelo zemlje. Ako se za izazivanje seizmičkih valova
koriste vertikalni izvori poput čekića (ili drop-weighta) nastaje vrsta površinskih valova
koji se nazivaju Rayleigh-ovi valovi. Oni se često nazivaju i “valjanje tla” (ground roll)
radi geometrije njihova kretanja.
Rayleigh-ovi valovi su površinski valovi pa se kreću po površini zemlje. Općenito,
površinski valovi mogu jedino nastati u mediju sa slobodnom površinom. Kretanje
Rayleigh-ovih valova sastoji se od uzdužnog (longitudinalnog) i poprečnog
(transverzalnog) kretanja sa međusobnim odnosom u fazi. Kretanje čestica je
ograničeno na vertikalnu os, koja uključuje smjer širenja vala. Tijekom prolaska vala,
čestica prelazi eliptičku putanju kojoj je velika poluos vertikalna (kada je val blizu
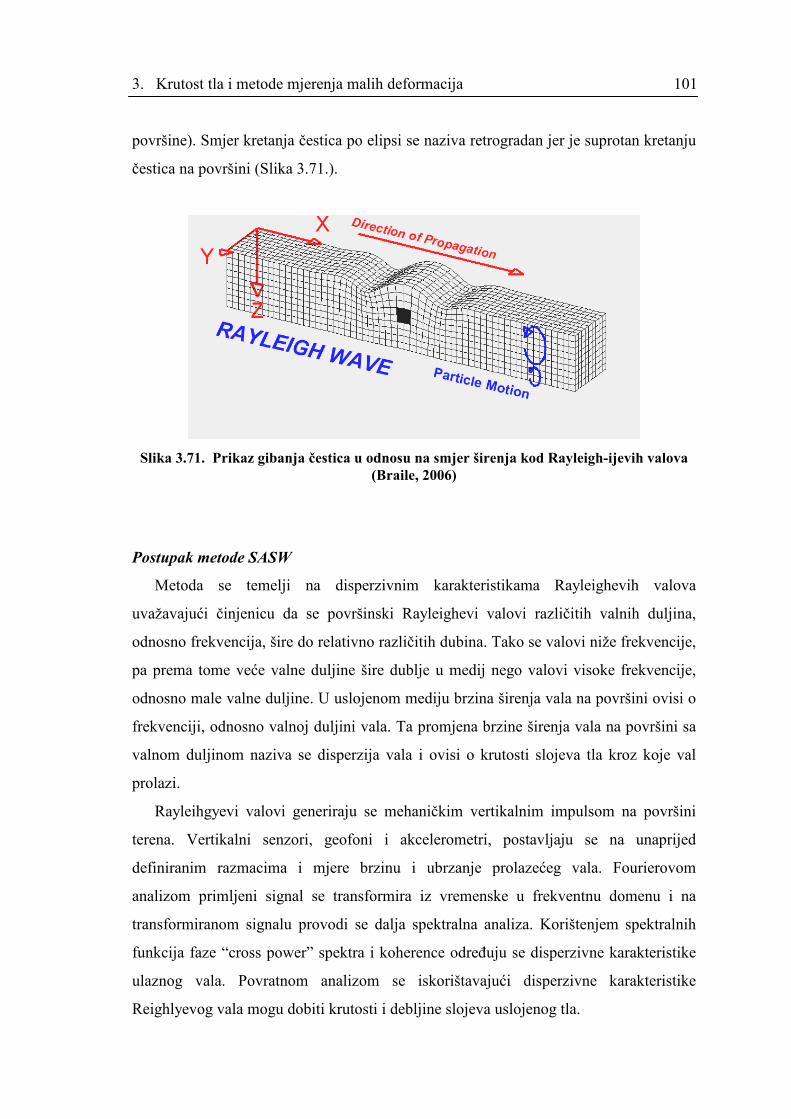
3. Krutost tla i metode mjerenja malih deformacija 101
površine). Smjer kretanja čestica po elipsi se naziva retrogradan jer je suprotan kretanju
čestica na površini (Slika 3.71.).
Slika 3.71. Prikaz gibanja čestica u odnosu na smjer širenja kod Rayleigh-ijevih valova
(Braile, 2006)
Postupak metode SASW
Metoda se temelji na disperzivnim karakteristikama Rayleighevih valova
uvažavajući činjenicu da se površinski Rayleighevi valovi različitih valnih duljina,
odnosno frekvencija, šire do relativno različitih dubina. Tako se valovi niže frekvencije,
pa prema tome veće valne duljine šire dublje u medij nego valovi visoke frekvencije,
odnosno male valne duljine. U uslojenom mediju brzina širenja vala na površini ovisi o
frekvenciji, odnosno valnoj duljini vala. Ta promjena brzine širenja vala na površini sa
valnom duljinom naziva se disperzija vala i ovisi o krutosti slojeva tla kroz koje val
prolazi.
Rayleihgyevi valovi generiraju se mehaničkim vertikalnim impulsom na površini
terena. Vertikalni senzori, geofoni i akcelerometri, postavljaju se na unaprijed
definiranim razmacima i mjere brzinu i ubrzanje prolazećeg vala. Fourierovom
analizom primljeni signal se transformira iz vremenske u frekventnu domenu i na
transformiranom signalu provodi se dalja spektralna analiza. Korištenjem spektralnih
funkcija faze “cross power” spektra i koherence određuju se disperzivne karakteristike
ulaznog vala. Povratnom analizom se iskorištavajući disperzivne karakteristike
Reighlyevog vala mogu dobiti krutosti i debljine slojeva uslojenog tla.

3. Krutost tla i metode mjerenja malih deformacija 102
Kako se metodom generiraju i mjere površinski valovi, cijeli postupak se odvija na
površini terena te metoda spada u grupu nerazornih seizmičkih mjerenja. Metoda je
potencijalno vrlo pouzdana i ne zahtijeva skupa bušenja, a rješava neke od temeljnih
problema površinske refrakcije, jer može detektirati mekši sloj koji se nalazi ispod
krućeg sloja.
Uporabivi rezultati ovog dinamičkog mjerenja su:
• Brzine posmičnih valova (vs) po dubini
• Posmični moduli po dubini, G = ρ ⋅ vs2
• Moduli elastičnosti po dubini, E = 2 ⋅ ρ ⋅ vs2 (1+v)
• Debljine slojeva po dubini
Cijeli postupak podijeljen je u tri dijela:
1. Prikupljanje podataka na terenu
2. Određivanje krivulje disperzije
3. Povratna analiza određivanja profila posmičnih brzina po dubini.
Za prikupljanje podataka na terenu potrebna je slijedeća mjerna oprema:
• generator površinskih valova
• senzori
• analogno-digitalni pretvarač
• računalo
Osnovni zadatak generatora površinskih valova jest mehaničkim udarcem generirati
val sa što većim frekventnim opsegom i što većom valnom energijom. Različiti
materijali imaju i različite krutosti, te je stoga za pokrivanje većeg opsega frekvencija
potrebno primijeniti i različite generatore. Također je za pobuđivanje dubljih slojeva,
odnosno generiranje nižih frekvencija potreban veći teret nego za slojeve bliže površini
za koje su potrebne više frekvencije.
3. Krutost tla i metode mjerenja malih deformacija 103
Za mjerenje brzine i ubrzanja prolazećeg površinskog vala koriste se vertikalno
polarizirani senzori i to za mjerenje brzina geofoni (na pr. L-4C, Marc Products), a za
mjerenje ubrzanja akcelerometri (na pr. 352A78, PCB). Prvi zahtjev na korištene
senzore je raspon frekvencija koji mogu registrirati. Za relativno niže frekvencije (do 1
kHz) koriste se geofoni, a za visoke frekvencije (do 20 kHz) koriste se akcelerometri.
Kvaliteta akcelerometara pri mjerenju visokih frekvencija je od velike važnosti, te je za
ovo mjerenje potrebno koristiti visokokvalitetne senzore. Olakšavajuća okolnost je da
se u ovoj metodi kao rezultat mjerenja koristi fazni pomak između dva senzora a ne
amplituda koja je mnogo osjetljivija na pogreške mjerenja. Drugi zahtjev na senzore je
osjetljivost. To je naročito važno jer osjetljiviji senzori registriraju veću valnu energiju.
Na većim udaljenostima senzora signal se kod slabo osjetljivih senzora potpuno izgubi,
pa je ono što se registrira u stvari buka. Pri postavljanju senzora veliku pažnju treba
posvetiti prijanjanju senzora za podlogu. Senzor mora cijelom svojom površinom
kvalitetno prilegnuti za podlogu, a osiguranje ovog uvjeta predstavlja najsporiji i najteži
dio samog mjerenja. Postupak mjerenja se ne smije ubrzavati bržim postavljanjem
senzora nego što je to neophodno.
Analogno-digitalni pretvarač (na pr. DAQ PAD - 1200, National Instruments)
neophodan je da bi se analogni signal primljen od senzora digitalizirao i pretvorio u
signal koji računalo može konvertirati, pohraniti i obraditi. Najvažnija karakteristika
pretvarača je njegova rezolucija. Rezolucija predstavlja broj bita koji pretvarač koristi
za interpretaciju ulaznog signala. Veća rezolucija znači bolju digitalizaciju podataka.
Tako se na primjer za 3-bitni pretvarač opseg ulaznog analognog signala dijeli na 8 (23)
dijelova te imamo samo 8 mogućih rezultata mjerenja. Danas su u uporabi 12 i 16-bitni
pretvarači koji ulazni analogni opseg dijele do 65536 puta (216). Analogno-digitalni
pretvarači dolaze u vanjskoj izvedbi kada imaju vlastito napajanje i priključuju se na
računalo, te u unutarnjoj izvedbi kada se stavljaju u računalo od koga onda i dobivaju
napajanje. Druga važna karakteristika je frekvencija uzorkovanja i brzina pretvaranja
analognog u digitalni signal. Za SASW je dovoljan pretvarač od 100 kHz.
Za računalo koje će se koristi u ovoj metodi može se koristiti bilo koje prenosivo
osobno računalo. Poželjno je da ima brz procesor da bi mogao što brže primiti i obraditi
signal.

3. Krutost tla i metode mjerenja malih deformacija 104
Sam postupak mjerenja, odnosno prikupljanja podataka odvija se korištenjem dva
senzora. Cijeli postupak bi se mogao znatno ubrzati korištenjem većeg broja senzora ali
je princip uvijek isti. Shematski prikaz mjerne konfiguracije prikupljanja podataka
prikazan je na slici 3.72.
Slika 3.72. Shematski prikaz konfiguracije mjerne opreme za SASW postupak
(Kovačević, 1999)
Mehaničkim impulsom generiraju se površinski valovi koji se od izvora šire prema
senzorima. Signal se od senzora vodi do računala gdje se sprema u digitalnom obliku.
Udaljenost od generatora impulsa do bližeg senzora (S) jednaka je udaljenosti između
senzora (X). Radi obuhvaćanja što većeg frekventnog opsega, senzori se razmiču na
unaprijed definirane udaljenosti, te se postupak ponavlja i podaci se spremaju u
računalu.
Određivanje krivulje disperzije
Krivulja disperzije predstavlja ovisnost brzine vala na površini i valne duljine
odnosno frekvencije. Za svaki razmak senzora snimljeni vremenski signali oba senzora
x(t) i y(t), brzom Fourierovom transformacijom pretvaraju se iz vremenske u frekventnu

3. Krutost tla i metode mjerenja malih deformacija 105
domenu kojom se dobivaju frekventni signali X(f) i Y(f). Na ovako transformiranim
signalima provodi se dalja spektralna analiza. Ključni rezultati spektralne analize su
funkcija koherence, te faza “cross power” spektra. Funkcija koherence predstavlja
odnos signala i buke, odnosno mjeru prihvatljivosti snimljenog signala. Koherenca
mora biti blizu jedinici da bi se podaci uzeli u dalje razmatranje. Faza “cross power”
spektra )( fxyθ predstavlja fazni pomak gibanja između dva senzora.
Vrijeme prolaska vala između dva senzora za svaku frekvenciju, može se dobiti iz
izraza
f
fxyft
π
θ
2
)()( = (3.21)
gdje je faza “cross power” spektra izražena u radijanima a frekvencija u Hz. Vrijeme se
dobiva u sekundama. Brzina vala na površini dobije se dijeljenjem razmaka senzora sa
dobivenim vremenom po izrazu
)()(
ft
XfVR = (3.22)
Odgovarajuća valna duljina dobije se dijeljenjem brzine prolaska vala i frekvencije
po izrazu:
f
fVfL R
R
)()( = (3.23)
Sada za svaku frekvenciju postoji odgovarajuća valna duljina čime je definirana krivulja
disperzije.
Povratna analiza određivanja profila posmičnih brzina po dubini
Za uslojenu sredinu u kojoj se krutost mijenja s dubinom, potrebno je primijeniti
postupak inverzije da bi se iz mjerene krivulje disperzije dobio profil brzina posmičnih
valova po dubini. Postupak se odvija tako da se prvo za pretpostavljeni profil brzina
izračuna teoretska krivulja disperzije koja se zatim usporedi sa izmjerenom krivuljom
disperzije. Zbog nepoklapanja ovih krivulja postupak se ponavlja mijenjajući debljine i
krutosti slojeva u profilu tla. Kada se teoretska i izmjerena krivulja disperzije poklope s
inženjerski zadovoljavajućom točnošću, pretpostavljeni profil smatra se rješenjem. Radi

3. Krutost tla i metode mjerenja malih deformacija 106
brzog izračunavanja teoretske krivulje disperzije razvijen je program INVERT
(Nazarian, 1984) koji se u nešto izmijenjenom obliku koristi prilikom praktičnih
mjerenja.
Teoretska krivulja disperzije predstavlja rješenje širenja ravninskih Raylieghevih
valova i zasniva se na Haskell-Thomsonovoj matričnoj formulaciji širenja valova u
uslojenim sredinama. Krivulja disperzije predstavlja u toj formulaciji vlastite
vrijednosti transfer matrice uslojene sredine.
Slika 3.73. Prikaz rezultata mjerenja SASW metodom, (lijevo) profil posmičnih
brzina vs po dubini i (desno) profil posmičnih modula, G0 po dubini
(Kovačević, 1999)

4. Ispitivanje pijeska u troosnom uređaju 107
4. ISPITIVANJE PIJESKA U TROOSNOM UREĐAJU
4.1. Općenito o troosnom uređaju
Troosni uređaj je osmišljeni sustav mjerne opreme (aparata) koji se redovito
uporablja u geotehničkim labratorijima, bilo za komercijalne ili istraživačke svrhe.
Namjena ovoga uređaja je određivanje mehaničkih svojstava valjkastih uzoraka tla pri
osno simetričnim uvjetima troosnog, odnosno dvoosnog naprezanja, s ciljem
određivanja prvenstveno parametara čvrstoće tla, te naponsko deformacijskih
karakteristika tla, bilo u dinamičkim (cikličkim) ili statičkim (monotonim) uvjetima
smicanja. S obzirom na uvjete dreniranja i konsolidacije ispitivanja se mogu obavljati u
dreniranim i/ili nedreniranim uvjetima, odnosno konsolidiranim i/ili nekonsolidiranim
uvjetima. Konsolidacija može biti izotropna ili anizotropna, a s obzirom na saturaciju
uzorka, ispitivanja se mogu obavljati na saturiranim i/ili nesaturiranim uzorcima.
Opterećenja mogu biti tlačna ili vlačna. S obzirom na sve prethodno, odmah se nameću
razne kombinacije uvjeta troosnog ispitivanja tla. Konvencionalni troosni uređaji imaju
određena ograničenja s obzirom na broj kombinacija koja se mogu odvijati za vrijeme
jednog pokusa. Gotovo sve novije generacije troosnih uređaja podržavaju sve (logično)
moguće kombinacije uvjeta troosnih ispitivanja tla. Tako razlikujemo najčešće pokuse
sa tlačnim opterećenjem kao izotropno nedrenirani pokus (CIU – isotropically
consolidated undrained test), izotropno konsolidirani derenirani pokus (CID –
isotropically consolidated drained test), konsolidirani nedrenirani pokus (CU –
consolidated undrained test), konsolidirani drenirani (CD – consolidated drained test) ,
nekonsolidirani nedrenirani pokus, (UU – unconsolidated undrained test) i druge
kombinacije opterćenja, konsolidacije i saturacije. Točne procedure rada sa troosnim
uređajem za konvencionalne svrhe, standardizirane su kroz tehničke standarde (norme)
pojedinih država, a najvažniji među njima su: BS EN 1377:7-2004, BS 1377:8-2007,
ASTM D 2850 ASTM D 4767, UNI CEN ISO/TS 17892-8, UNI CEN ISO/TS 17892-9.
Upravljanje, odnosno nametanje opterećenja, prikupljaneje i obrada rezultata za
konvencionalne svrhe je obično automatizirana po nekom od navednih standarda. Ovdje
treba napomenuti da se kod (konvencionalnih) uporaba podrazumjeva troosno

4. Ispitivanje pijeska u troosnom uređaju 108
ispitivanje tla sa aparatom koji koristi hidrauličku ćeliju projektiranu prema Bishop i
Wesley (1975.) razvijenoj na Imperial Collage u Londonu. Kod ovakvih ćelija bočno
naprezanje je rezultat tlaka vode u ćeliji, pa ustvari imamo troosno naprezanje gdje su
dva bočna, glavna naprezanja jednaka. Naime, uvijek je 32 σσ = , odnosno 32 σσ ′=′ i ne
mogu se međusobno razlikovati, pa se može reći da se radi o „dvosnom“ naprezanju
(Slika 4.1.).
Slika 4.1. Shematski prikaz (standardnog) konvencionalnog troosnog uređaja
(www.gdsinstruments.com)
Ukoliko se posebno ne naglasi u literaturi (i praksi) pod troosnim ispitivanjem tla, te
interpretaciji rezultatima ispitivanja, podrazumjeva se (konvencionalno) ispitivanje tla u
ćeliji dizajniranoj prema Bishop i Wesley (1975) gdje je ćelijski tlak jednak za glavna
naprezanja 32 σσ = .
Međutim, postoji i troosni uređaj za tzv. „pravo troosno smicanje“, koji može
simulirati troosno naprezanje uzoraka sa različitim vrijednostima glavnih naprezanja u
sva tri smjera, 321 σσσ ≠≠ , (Slika 4.2.).

4. Ispitivanje pijeska u troosnom uređaju 109
Slika 4.2. Prikaz „pravog” troosnog uređaja (GDSTTA) True Triaxial Apparatus
(www.gdsinstruments.com)
Troosni uređaj je jedan od najsloženijih uređaja u geotehničkom laboratoriju, koji se
sastoji od više mehaničkih, hidrauličkih i elektroničkih sklopova povezanih u jednu
upravljačku cjelinu. Osnovni dio uređaja se sastoji od rama (postolja) i troosne ćelije u
koju se stavlja uzorak, zatim crpki za nametenje osnog, ćelijskog i pornog tlaka, te
osjetila za mjerenje pomaka i sustava upravljanja. Svaki troosni uređaj je polivalentan
ili modularan tako da se na jednoj osnovnoj platformi uz dodatak raznih modula mogu
obavljati i razni monotoni ili ciklički pokusi (Slika 4.3.). S obzirom na razinu tzv.
“dodatne opreme” koja se obično sastoji od visoko kvalitetnih mjernih osjetila pomaka,
tlaka, software-skih modula upravljanja i sl., cijena ovakvih paketa dodatne opreme
često premašuje bilo kakvu trenutnu komercijalnu isplativu vrijednost. Stoga, s obzirom
na razinu osjetljivosti mjerne opreme i sustava upravljanja, te cijenu koštanja troosnog

4. Ispitivanje pijeska u troosnom uređaju 110
uređaja razlikujemo konvencionalne i znanstveno-istraživačke konfiguracije troosnih
uređaja.
Slika 4.3. Shematski prikaz modularno automatiziranog konvencionalnog troosnog
uređaja (www.controls.it)
Takva jedna suvremena znanstveno-istraživačka konfiguracija troosnog uređaja
nalazi se u laboratoriju Zavoda za geotehniku na Građevinskom fakultetu Sveučilišta u
Zagrebu. To je uređaj koji je opremljen (dodatnom opremom) visoko kvalitetnim
osjetilima novije generacije za mjerenje malih deformacija lokalno na uzorku kao što
su:
• Hall efekt osjetila (Hall Effect Local Strain Transducers)
• LDT osjetila (Local Deformation Transducers)
• Bender elementi (Bender Elements)

4. Ispitivanje pijeska u troosnom uređaju 111
4.2. Konfiguracija troosnog uređaja na Građevinskom fakultetu u
Zagrebu
U laboratoriju Zavoda za geotehniku na Građevinskom fakultetu Sveučilišta u
Zagrebu, nalazi se jedna konfiguracija troosnog uređaja namjenjena ispitivanju
koherentnog i nekoherentnog tla za monotona ili ciklička opterećenja, (pod
komercijalnim nazivom Triaxial Testing System GDSTTS). Osnovna konfiguracija
svakog troosnog uređaja, pa tako i ovoga, sastoji se od troosne ćelije, crpki za
namatanje opterećenja i očitanje tlaka u njima, te mjernih osjetila za mjerenje pomaka
(deformacija) i sile. Konfiguraciju troosnog uređaja u laboratoriju Građevinskog
fakulteta čine sklopovi komercijalne izvedbe proizvođača GDS Instruments Ltd
(Triaxial Testing System GDSTTS) i Wykeham-Farrance Ltd. Na uređaju su načinjene
određene preinake u više navrata, a u svrhu što kvalitetnijeg postupka ugradnje i
odvijanja procesa smicanja. Detaljan opis rada uređaja kao i niz preinaka izvedenih
ciljem poboljšanja kvalitete rada uređaja dan je u radovima Matešić (1996, 1997, 2002).
Veće prilagodbe na osnovnoj platformi načinjene su 1999. godine za potrebe mjerenja
vrlo malih deformacija pomoću LDT osjetila. U radu Matešić (2002) daje se prikaz niza
ispitivanja malih do vrlo malih deformacija na uzorcima gline i pijeska obavljenih uz
pomoć LDT osjetila pri monotonom nedreniranom smicanju. Detaljan opis tehnike
mjerenja sa LDT osjetilima dat je u poglavlju 3.2.5.
Zamjena i nadogradnja elemenata troosnog uređaja
Posljednja nadogradnja, odnosno modifikacija troosnog uređaja, zamjene A/D
konvertora, servisa crpki i izmjene upravljačkog software-a, a sve za prilagodbu
mjerenja BE- bender elementima načinjena je 2006. godine, što je omogućilo ispitivanje
posmične krutosti tla pri malim deformacijama do sloma na istom uzorku. Time
postojeća istraživačka konfiguracija troosnog uređaja prati suvremene trendove
ispitivanja tla u svijetu.
Potpuno automatizirani rad troosnog uređaja kao cjeline omogućava osobno računalo s
odgovarajućim upravljačkim software-om. Osobno računalo je povezano sa svim
elementima sustava troosnog uređaja, a djeluje kao CNUS (centralni nadzorno upravljački
sustav). CNUS je višekratno modularan i sastoji se od osnovnog software-a na koji se

4. Ispitivanje pijeska u troosnom uređaju 112
prikopčavaju pojedini moduli. Svaki modul predstavlja pojedinu vrstu pokusa, koji je
međusobno kompatibilan sa drugim modulima. Na taj način se uređaj nadograđuje do
iznimno složenih simulacija, koje se mogu odvijati u laboratorijskim uvjetima.
Stara troosna ćelija koju je proizvela tvrtka Wykeham-Farrance Ltd zamjenjena je
novom “pomičnom”ćelijom tvrtke GDS Instruments Ltd kapaciteta (nosivosti) ćelijskog
tlaka vode od 2000 kPa. Stara ćelija (Wykeham-Farrance Ltd), koja se ručno potpuno
skidala s postolja, namjenjena je za uporabu LDT osjetila jer su električni kablovi za
napajanje integrirani u samo tijelo postolja ćelije. No, LDT osjetila se mogu “otpustiti”
sa stare ćelije, te uz malu prilagodbu spojeva brtvljenja, upotrijebit i na novoj ćeliji
(GDS Instruments Ltd). Nova troosna ćelija je tzv. “pomična” ćelija koja se podiže i
spušta na postolje preko osne vodilice i ne skida se kompletno s postolja. Jednim krajem
ona kliže u smjerovima “gore-dolje” te je puno jednostavnija za rukovanje od prethodne
(stare). I nova troosna ćelija je potpuno dizajnirana prema hidrauličkom troosnom uređaju
za ispitivanje uzoraka pri kontroliranim tragovima naprezanja, razvijenom na Imperial
College Londonu (Bishop i Wesley, 1975). Ista je prilagođena za instaliranje osjetila za
mjerenje malih i vrlo malih deformacija kao što su LDT osjetila, Hall efekt osjetila i
bender elementi (BE).
Slika 4.4. Slika nove GDS „pomične“ troosne ćelije za uzorke promjera 35/50 mm i
kapaciteta 2 MPa (Građevinski fakultet u Zagrebu)

4. Ispitivanje pijeska u troosnom uređaju 113
U konfiguraciji troosnog uređaja nalaze se i tri istovrsne mikroprocesorom vođene
hidrauličke crpke (izvorni naziv: Digital controller 200cc). Proizvođač je tvrtka GDS
Instruments Ltd. Ovakve crpke sa danas isporučuju pod nazivom ADVDPC (Advanced
Pressure/Volume Controller). Ovisno o načinu priključenja crpke na troosnu ćeliju, crpke
služe za nametanje tlakova tako da simuliraju ćelijski tlak, ( 32 σσ = ), vertikalno osno
naprezanje ( 1σ ), te porni tlak vode (u) u uzorku. Za stlačivu tekućinu u cilindrima koristi
se destilirana i prethodno dearirana voda. Voda se prije punjenja cilindara dearira vakum
crpkom u vremenu do min. 6 sati prije uporabe, kako bi se istisnuo zrak iz vode
(mjehurići zraka). Potpuno dearirana voda znatno je kruća od nedearirane, pa prilikom
izvedbe pokusa treba voditi računa o kapacitetu crpke i njezinim limitima. Naime, ukoliko
je uzorak izrazito porozan (ili rahli), a pokus se započinje saturacijom uzorka, tada je
crpku za nametanje pornog tlaka potrebno postaviti u krajnji početni (prednji) položaj sa
najvećom količinom vode u cilindru, jer u protivnom prilikom saturacije moguće je da
crpka dosegne limit(potrošila se sva voda iz cilindra), a da se uzorak nije u potpunosti
saturirao. Voda se u cilindrima periodično mijenja i o tome se vodi evidencija.
Slika 4.5. GDS digitalna crpka (Digital controller 200cc) za nametanje tlaka u
troosnom uređaju (Građevinski fakultet u Zagrebu)
U cilindrima crpke su ugrađena osjetila za mjerenje tlaka koja se nalaze u izravnom
dodiru s vodom u cilindru. Tehničkim rješenjem ćelije uređeno je upravljanje pomakom
klipa koje se odvija u koracima od 1 mm3, a moguć je i polukorak od 0.5 mm
3. To
svojstvo crpke omogućava njeno korištenje i kao mjerila promjene volumena. Međutim, u
slučaju upravljanja pokusom putem promjene volumena vode u crpkama, treba biti jako

4. Ispitivanje pijeska u troosnom uređaju 114
oprezan zbog visoke osjetljivosti na temperaturne razlike zraka u prostoriji u kojoj se
ispitivanja provode. Crpke su tehniči deklarirane za pouzdano korištenje uz
kondicionirane uvjete zraka u prostoriji sa diferencijom od najviše ± 0,5° C. Ova tvrdnja
je potkrepljenja nizom provjera u laboratoriju, pa se izbjegava upravljanje pokusima preko
promjene volumena vode u crpkama za dugotrajna ispitivanja. Crpke u cilindrima za
tlačenje koriste destiliranu i deariranu vodu koja je podložna termičkim promjenama.
Upravljanje crpkom moguće je unošenjem naredbi preko njene vlastite tipkovnice ili
preko osobnog računala. Najveći dopušteni tlak u crpki je 2000 kPa, a radni volumen
cilindra crpke 200 cm3.
Tehničke (izvorne) karateristike GDS digitalnih crpki su:
• Pressure ranges: 2000 kPa
• Volumetric capacity (nominal): 200 cc for all pressure ranges.
• Resolution of measurement and control: pressure = <0.1% full range, volume =
0.5cu mm (<8MPa)
• Accuracy of measurement: pressure = <0.1% full range, volume =< 0.1%
measured value
• Size: 860mm x 230mm x 220mm
• Weight: 20kg
• Power: 92-265v, A.C. 48-440Hz, 65w maximum, single phase three wire
earthed supply, 2A fuse x 2
• Ambient temperature range: 10°C to 30°C
• Relative humidity: 20% to 80% non condensing
• Control panel: 16 keypad membrane touch panel with audio feedback. Functions
include zero pressure, target
• pressure, zero volume, target volume, fill, empty, test, ramp, stop, continue,
reset, enter, +, -, >, <, yes, no
• User interface: 40 character, 1-line liquid crystal display
• Computer interface: IEEE-488 Standard, Talker/Listener or optional serial
RS232 (IEEE only with RFM)
Uređaj za uređenje signala, odnosno A/D konverter, napaja i očitava mjerilo sile
(load cell) i mjerilo tlaka porne vode na dnu i/ili vrhu uzorka, te na upit računala šalje
očitanja računalu. Proizvođač je tvrtka GDS Instruments Ltd.
Mjerenje vertikalne osne sile izvodi se izravno osjetilom za silu (izvorni naziv
Internal Submersible Load Cell). Uređaj je opremljen sa dva osjetila za silu različitog
kapaciteta. Jedan je sa rasponom mjerenja do 2 kN uz rezoluciju očitanja od 0,1%
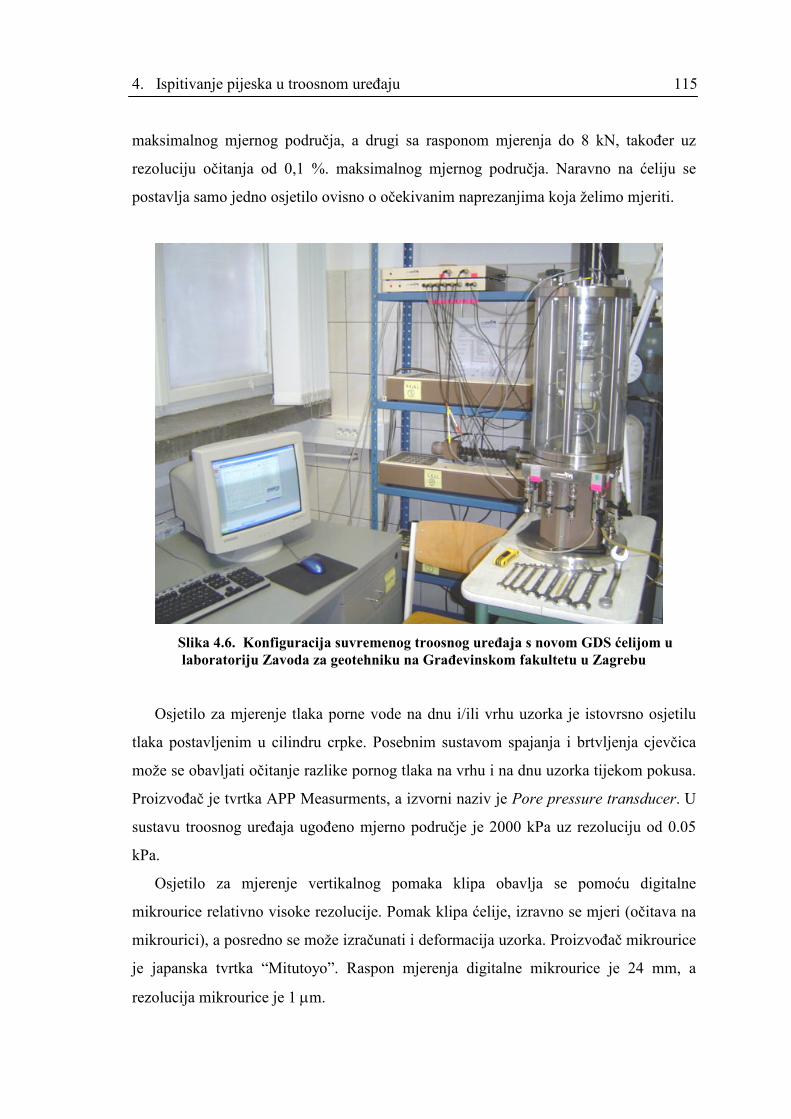
4. Ispitivanje pijeska u troosnom uređaju 115
maksimalnog mjernog područja, a drugi sa rasponom mjerenja do 8 kN, također uz
rezoluciju očitanja od 0,1 %. maksimalnog mjernog područja. Naravno na ćeliju se
postavlja samo jedno osjetilo ovisno o očekivanim naprezanjima koja želimo mjeriti.
Slika 4.6. Konfiguracija suvremenog troosnog uređaja s novom GDS ćelijom u
laboratoriju Zavoda za geotehniku na Građevinskom fakultetu u Zagrebu
Osjetilo za mjerenje tlaka porne vode na dnu i/ili vrhu uzorka je istovrsno osjetilu
tlaka postavljenim u cilindru crpke. Posebnim sustavom spajanja i brtvljenja cjevčica
može se obavljati očitanje razlike pornog tlaka na vrhu i na dnu uzorka tijekom pokusa.
Proizvođač je tvrtka APP Measurments, a izvorni naziv je Pore pressure transducer. U
sustavu troosnog uređaja ugođeno mjerno područje je 2000 kPa uz rezoluciju od 0.05
kPa.
Osjetilo za mjerenje vertikalnog pomaka klipa obavlja se pomoću digitalne
mikrourice relativno visoke rezolucije. Pomak klipa ćelije, izravno se mjeri (očitava na
mikrourici), a posredno se može izračunati i deformacija uzorka. Proizvođač mikrourice
je japanska tvrtka “Mitutoyo”. Raspon mjerenja digitalne mikrourice je 24 mm, a
rezolucija mikrourice je 1 µm.

4. Ispitivanje pijeska u troosnom uređaju 116
Pored prethodno navedene opreme, troosni uređaj je opremljen i dodatnim
uređajima i osjetilima za mjerenje malih deformacija izravno na uzorku tla. To je skup
uređaja koji se sastoje od visoko kvalitetnih elektroničkih osjetila, te pratećih
elektronskih pojačala za uređenje signala i software-a. Laboratorij posjeduje osjetila kao
što su:
• Hall efekt osjetila (Hall Effect Local Strain Transducers), GDS instruments
• LDT osjetila (Local Deformation Transducers), University of Tokyo
• Bender elementi (Bender Elements), GDS instruments
Svaki od navedenih osjetila uz sebe posjeduje pojačalo za kondicioniranje i uređenje
signala. Sve pojedinosti o osjetilima, načinu mjerenja i tehničkim karakteristikama dato
je u poglavljima 3.2.3, 3.2.4, i 3.2.5.
Cijelokupni sustav mjerne opreme je digitaliziran i računalno upravljiv. Treba
istaknuti da je tehnologija mjerenja malih deformacija Hall efekt osjetilima uspješno
korištena pri ispitivanju materijala tla za potrebe više geotehničkih složenih projekata u
RH još od 1996. godine (brana Peruča, trgovački centar Esplanade, trgovački centar
Iblerov trg, brana Kosinj, autocesta Krapina-Macelj).
Najnovija konfiguracija troosnog uređaja sa Hall efekt osjetilima najnovije
generacije i bender elementima korištena je pri ispitivanju pijeska za potrebe ovoga
rada.

4. Ispitivanje pijeska u troosnom uređaju 117
4.3. Određivanje minimalne i maksimalne zbijenosti pijeska
Za potrebe ovoga rada provedeno je ispitivanje minimalne i maskimalne zbijenosti
pijeska izražene preko koeficijenta pora (e). Ispitivanja su provedena u Geotehničkom
laboratoriju Instituta Građevinarstva Hrvatske (IGH) u Zagrebu. Ispitivanja su
provedena prema američkom standardu (normi) ASTM D 4253 i ASTM D 4254.
Pijesak potječe sa lokaliteta rijeke Save u okolici Zagreba pa je nazvan Savski pijesak.
Slika 4.7. Granulometrički dijagram Savskog pijeska
Minimalna i maksimalna zbijenost nekoherentnog materijala (u našem slučaju
pijeska) su zbijenosti koje odgovraraju najrahlijem (emax) odnosno najzbijenijem (emin)
stanju materijala. Aparatura za određivanje minimalne i maksimalne zbijensoti pijeska
sastoji se od elektromagnetskog vibrirajućeg stola i kalupa za ugradnju s utegom. Za
cilindar kalupa najčešće se upotrebljava cilindar standardiziranih dimenzija i poznatog
volumena (kao kod standardnog Proctorovog pokusa). Elektomagnetski stol je mase
oko 50 kg. Frekvencija vibrirajućeg stola je 50-60 Hz, a amplituda s praznim kalupom i
utegom je 0,1 µm. Utezi su dimenzionirani tako da predstavljaju opterećenje od 12,5
kN/m2.
Postupak je primjenljiv za uzorke pijeska čije maksimalno zrno nije veće od 4.75
mm, a koja ne sadržavaju više od 12 % o ukupne mase mase koja prolazi kroz sito od
0.75 mm. Masa uzorka je 3 kg. Uzorak pijeska pripremi se tako da se masa od 3 kg
pijeska prethodno prosije kroz sito od 4.75 mm, te se dodatnim prosijavanjem kroz sito

4. Ispitivanje pijeska u troosnom uređaju 118
od 0.75 mm provjeri količina mase manje od 0.75 mm. Prije ugradnje u kalup uzorak
se osuši na 110 ± 5 °C i ponovno prosije kroz „mala“ sita da se slome sve eventualne
veze među zrnima. Prije ugradnje uzorka provjeri se ispravnost elektromagnetnog
vibrirajućeg stola i baždari se cilindar kalupa za ugradnju. Baždarenje cilindra kalupa
može se obavljati direktnim i indirektnim postupkom.
Direktnim postupkom dimenzije cilindra kalupa ustanove se izravnim mjerenjem
pomoću digitalne mjerke nonijusa s rezolucijom čitanja od 0.025 mm. Mjere se
unutarnji promjer i visina cilindra kalupa. Mjerenja se obavljaju u tri različite točke a za
mjerodavnu uzima se srednja vrijednost očitanja. Razlika u izračunavanju volumena
nesmije biti veća od 2.8 cm3 između pojedinačnog čitanja.
Indirektno baždarenje provodi se tako da se volumen cilindra kalupa puni vodom do
vrha i iz mase vode odredi volumen cilindra kalupa. Kada se kalup napuni vodom do
vrha, na vrh se stavi staklena ravna ploča kako bi se odredila ispunjenost vodom do
ruba. Temeperatura vode u kalupu treba izmjeriti i volumen izračunati s gustoćom koja
treba odgovarati toj temeperaturi. Da bi staklena ravna ploča što bolje nalijegala na
rubove kalupa, prethodno treba namazati industrijskom mašću. Volumen vode se odredi
dijeljenjem mase vode s jediničnom masom vode na toj temeperaturi.
Prije ugradnje obavi se početno čitanje tako da se odredi početno čitanje na
mikrourici (min. rezolucije 0,1mm). Stalak sa mikrouricom treba biti jako dobro
fiksiran. Takvo čitanje ponovi se tri puta, odnosno za svaku mikrouricu posebno. Od
svih mjerenja izračuna se prosječno početno očitanje.
Slika 4.8. Sipanje pijeska u cilindar kalupa

4. Ispitivanje pijeska u troosnom uređaju 119
Za određivanje minimalne zbijenosti uzorak se ugrađuje u kalup u što rahlijem
stanju, odnosno sipanjem iz zdjelice s „nosom“ ili tuljcem s konstantnim punjenjem s
visine od najviše 1,3 cm. Zdjelicu s pijeskom, odnosno tuljac, potrebno je spiralno
pomicati oko ruba cilindra kalupa prema unutrašnjosti i paziti da ne dolazi do
segregacije čestica. Cilindar kalupa je potrebno napuniti za do 2,0 cm više od vrha
kalupa i zatim poravnati vrh povlačenjem čeličnog noža preko viška pijeska. Tako se
odstrani višak pijeska i zaravna cilindar kalupa, te se sve izvaga. Na temelju razlike u
masama punog i praznog cilindra kalupa odredi se masa pijeska. Minimalna zbijenost
pijeska može se izraziti preko maksimalnog koeficijenta pora (emax) ili preko minimalne
suhe gustoće (ρd min).
Slika 4.9. Pijesak u kalupu prije i poslije poravnanja s vrhom cilindra kalupa
Određivanje maksimalne zbijenosti se nastavlja na postupak za određivanje
minimalne zbijenosti. Na cilindar kalupa se postavi nastavak cilindra za vođenje utega
težine od oko 12.5 N, na uzorak se stavi poklopac i namjesti uteg. Takav cilindar sa
pijeskom i utegom namjesti se na platformu elektomagnetskog vibrirajućeg stola i stavi
na vibriranje u trajanju od 10 minuta. Po završetku vibriranja vodilica cilindra i uteg se
uklone, te izmjeri prosječno slijeganje uzorka pijeska u cilindru. Čitanje se provede na
najmanje tri točke površine pijeska i izračuna srednja vrijednost očitanja. Međusobna
razlika u čitanju nesmije biti veća od 2 %

4. Ispitivanje pijeska u troosnom uređaju 120
Slika 4.10. Vibriranje kalupa s pijeskom i utegom
Prema standardu pokus se ponavlja tri puta, s tim da se vrijednost jediničnih težina
suhog uzorka pijeska međusobno ne razlikuju više od 2 %, a za mjerodavnu uzima se
srednja vrijednost od sva tri mjerenja.
Slika 4.11. Vaganje kalupa sa pijeskom
U skladu s pokusom (procedurom) mjeri se i računa:
0min
V
Md =ρ (4.1)
1max
V
Md =ρ (4.2)

4. Ispitivanje pijeska u troosnom uređaju 121
1max
min −=d
seρ
ρ (4.3)
1min
max −=d
seρ
ρ (4.4)
gdje su:
M masa uzorka
Vo početni volumen uzorka
V1 volumen uzorka nakon vibriranja
emin, emax, koeficijent pora (minimalni i maksimalni)
ρd min, ρd max , suha gustoća (minimalna i maksimalna)
ρs specifična gustoća uzorka
Vrijednosti određene u laboratoriju za uzorak Savskog pijesak su:
ρs = 2,700 g/cm3
emin= 0.714
emax= 1.082
Mehanička svojstva pijesaka (i šljunaka), dobrim dijelom ovise o indeksu gustoće
(ID). Indeks gustoće se definira kao:
100100(%)minmax
minmax
minmax
0max ×−
−=×
−
−=
dd
ddd
Dee
eeI
ρρ
ρρ
ρ
ρ (4.5)
gdje su eo početni koeficijent pora, emax i ρd min, te emin i ρd max koeficijenti pora i suhe
gustoće koji odgovaraju nekoj standardiziranoj minimalnoj, odnosno maksimalnoj
zbijenosti pijeska, odnosno krupnozrnog tla. Ove standardizirane zbijenosti dobiju se
posebnim standardiziranim pokusima (ASTM D4253, ASTM D 4254) čije su osnovne
značajke prethodno opisane. Indeks gustoće (ID) od 0 % predstavlja najrahlije, a (ID) od
100 % označava najzbijenije krupnozrno tlo u odnosu na standardizirano najrahlije,
odnosno najzbijenije stanje.

4. Ispitivanje pijeska u troosnom uređaju 122
Zanimljivo je napomenuti da su najveće suhe gustoće iz modificiranog Proctora i iz
pokusa najveće zbijenosti za krupnozrna tla približno iste, a da obje premašuju najveću
suhu gustoću po standardnom Proctorovom pokusu za oko 0.11 Mg/m3.
Teoretski, minimalna zbijenost odgovarala bi beskonačno rahloj strukturi koja bi
imala beskonačno veliki koeficijent pora, a teoretski maksimalna zbijenost odgovarala
bi materijalu s koeficijentom pora jednakim nuli. No, u prvom slučaju takva struktura bi
u našem gravitacijskom polju bila nestabilna, dok bi strukturu u drugom slučaju tražila
da se zrnca idealno dodiruju bez međusobnih praznina, što praktički nije moguće. Zato
se pribjegava nekim praktičnim i standardiziranim pokusima koji u „normalnim“
okolnostima daju minimalnu, odnosno maksimalnu zbijenost. Pomoću indeksa gustoće
može se definirati stanje pijeska kao:
-rahlo stanje za ID (%)= 0 – 33
-srednje zbijeno stanje za ID (%) = 33 – 66
-zbijeno stanje za ID (%) = 66 – 100
U američkoj se literaturi indeks gustoće (ID) naziva relativnom gustoćom i označava
s (Dr).
Granične vrijednosti koeficijenta pora za materijal koji se sastoji od kugla jednakog
promjera su emax = 0,91 i emin = 0,35 (Nonveiller, E. 1979).
Stupanj zbijenosti tla, recimo, u nekom nasipu često se u praksi izražava preko
relativne zbijenosti koja se definira kao:
100(%)max
×=d
dRC
ρ
ρ (4.6)
gdje je dρ gustoća zbijenog tla, a maxdρ najveća suha gustoća određena
standardnim ili modificiranim Proctorovim pokusom. Stoga u primjeni treba naglasiti
na koji se od ta dva pokusa relativna zbijenost odnosi.
Pojam relativne zbijenosti posebno se koristi pri određivanju kriterija ugradnje
zemljanih materijala u nasipe. Tako se može, na primjer, tražiti da tlo u izvedenom
nasipu mora imati relativnu zbijenost u odnosu na modificirani Proctorov pokus od

4. Ispitivanje pijeska u troosnom uređaju 123
najmanje 92 %. To znači da suha gustoća tla ugrađenog u nasip mora biti barem
0.92× maxdρ
Do sada opisane različite mjere zbijenosti imaju slične nazive i mogu izazvati
zabunu u primjeni pa ih je korisno u svakom projektu jasno definirati. Slika 4.12.
prikazuje međusobne odnose različitih mjera zbijenosti nasutog i zbijenog tla. Iz slike,
kao i iz definicija odgovarajućih pojmova, vidljivo je da indeks zbijenosti teoretski
može biti i manji od nule i veći od 100 %. Isto tako, i relativna zbijenost može teoretski
biti veća od 100 %.
Slika 4.12. Međusobni odnosi različitih mjera zbijenosti nasutog i zbijenog tla
(A. Szavits-Nossan, 2009)

4. Ispitivanje pijeska u troosnom uređaju 124
4.4. Troosno smicanje uzoraka pijeska
Ispitivanju ponašanja pijeska pri troosnom smicanju, prethodila je priprema uzoraka.
Priprema se sastoji od izrade uzorka u cilindričnom kalupu, ugradnje uzorka u trosnu
ćeliju, namještanje mjernih osjetila za mjerenje malih deformacija, saturacije i
konsolidacije uzorka, mjerenje B parametra, smicanja uzorka, te rastavljanje uzorka.
Izrada pješčanog uzorka
Za izradu uzorka potrebna je odgovarajuća laboratorijska oprema sa gumenom
membranom koju prethodno treba iscrtati prema pozicioniranju Hall efect osjetila
namjenjenih mjerenju malih deformacija izravno na uzorku, te istu obvezno provjeriti
na vododrživost (Slika 4.13.).
Slika 4.13. Laboratorijski pribor, iscrtavanje gumene membrane i
provjera vododrživosti

4. Ispitivanje pijeska u troosnom uređaju 125
Pijesak za izradu uzorka potječe sa lokaliteta rijeke Save u okolici grada Zagreba, pa
je nazvan Savski pijesak. Iz vreće pijeska (15 kg) uzeta je manja količina pijeska (oko
4,5 kg) dostatna za izradu 9 (devet) uzoraka. Postupak izrade ugradnje pijeska u kalup
proveden je po tvz. metodi vlažnog zbijanja (eng. moist tamping).
Slika 4.14. Vlaženje uzorka destiliranom vodom (oko 5 % ) i homogeniziranje u PVC
vrećicama
Pijesak je prethodo osušen u sušioniku na 105°C, za svaki uzorak. Nakon sušenja
pijesku se dodaje određena količina vode u takvom omjeru da mješavina pijeska
postigne vlažnost do 5 % (Slika 4.14.). Detaljan opis ugradnje može se naći u radovima
Ladd (1978) i Been i sur. (1991). Vlažnost pijeska omogućava kompaktnost (prividnu
kohezivnost) među česticama prilikom ugradnje i zbijanja. Kako bi se postigla
homogena vlažnost uzorka, pijesak je odstajao u PVC vrećicama oko 24 sata prije
početka izgradnje uzorka. Odstajanje pijeska u navedenom roku (24 sata) s važnošću do
5 % nije nužna ukoliko se namjerava provesti saturacija uzorka za vrijeme pokusa. Ova
vlažnost je potrebna iz tehničkih uvjeta izvedbe valjkastog oblika uzorka uz
preporučenu energiju zbijanja.
Za oblikovanje valjkastog uzorka služi nam čelični cilindirični kalup sastavljen iz
dva dijela (izrađuje se verzije i sa tri dijela). Promjer čeličnog cilindričnog kalupa je
prilagođen promjeru postolja. Postolje je modularno tako da se upotrebljava postolje u
koje je ugrađeno osjetilo, odnosno bender element (BE). Na poslolje se postavi porozna
brončana pločica, filter kamen i filter papir istog promjera kao i uzorak (50 mm). Važno
je da sonda bender elementa (BE), dio koji viri oko 3 mm, ima izravan kontakt sa

4. Ispitivanje pijeska u troosnom uređaju 126
uzorkom. Pomoću vakum cilindra za gumenu membranu, ista se postavi preko postolja i
pričvrsti sa dva gumena prstena (oringa). Nakon toga, polovice čeličnog cilindričnog
kalupa postave se uz postolje i čvrsto pričvrste remenastom čeličnom trakom. Na vrhu
kalupa postavi se nastavak u obliku prstenastog ljevka (Slika 4.15.).
Slika 4.15. Postolje kalupa sa bender elementom (BE) i čeličnim cilindričnim kalupom sa
ljevkom
Na čelični cilindrični kalup se postavi vodilica batića za zbijanje pijeska. To je
šuplja cijev kroz koju klizi batić za zbijanje pijeska. Batić završava stopicom u obliku
cilindra promjera 50 mm, kao i uzorak. Težina batića i visina padanja batića je
standardizirana za ugradnju pijeska (Slika 4.16.). Kako bi se postigla (što bolja)
homogena zbijenost uzorka, izrada se obavlja u pet slojeva. Nastoji se uzorak ugraditi
da svaki sloj ima prosječnu visinu od oko 20 mm nakon zbijanja. Stoga se masa uzorka
pojedinog sloja prethono proračuna, jer masa uzorka ovisi o ciljanoj zbijenosti uzorka i
svojstvima materijala. Ciljana masa uzorka se raspoređuje po slojevima na način da je
najdonji sloj najrahliji, pa se postupno po slojevima povećava zbijenost do najgornjeg
sloja. Evidentno je da će se donji slojevi dodatno zbijati pri zbijanju gornjih slojeva, pa
je to i razlog zašto se donji slojevi ugrađuju što rahlije od gornjih. Postupak izrade
uzorka u slojevima je slijedeći: iz vrećice se odvoji proračunata masa sloja; pijesak se
žlicom umeće u kalup; nakon umetanja pijesak se pomoću štapića ravnomjerno razrahli
do homogenog stanja; nakon razrahljenja pijesak se zbija uz kruženje batića uz
Sonda BE

4. Ispitivanje pijeska u troosnom uređaju 127
povremenu kontrolu visine; po postignuću određene visine sloja, svim slojevima, osim
petom sloju, ohrapavi se vrh (pomoću tvrdog kista) kako bi se homogeno povezao sa
slijedećim; ponavljaju se koraci za slijedeći sloj; peti (najgornji) sloj, koji je za cca 0.5
mm iznad membrane poravna se profiliranom letvom tako da vrhuni s membranom;
pijesak koji se pri tome ukloni izvaže se i korigira se masa uzorka u proračunima.
Slika 4.16. Postavljanje kalupa batića i zbijanje pijeska kod izrade uzorka
Nakon ugradnje, stavlja se gornji dio osjetila bender elementa (BE), navuče gumena
membrana, te uzorak osobodi rastavljanjem čeličnog kalupa (Slika 4.16.).
Slika 4.17. Postavljanje gornjeg BE i skidanje čeličnog cilindričnog kalupa

4. Ispitivanje pijeska u troosnom uređaju 128
Ugradnja uzorka, Bender elemenata (BE) i Hall efekt osjetila
Prije početka ugradnje uzorka u troosnu ćeliju, sve cijevi i ventili (troosne ćelije),
koji su u dodiru s pornom vodom, se isuše i kroz njih se propusti CO2. Po ugradnji
uzorka u troosnu ćeliju, na isti se postavljaju Hall efekt osjetila za mjerenje malih
deformacija. Postupak ugradnje je sljedeći: uzorak se postavi na postolje i vakumira sa
podtlakom kroz sustav pornog tlaka “back pressure” (cca 20 kPa) kako bi zadržao
formu valjka; stopice i Hall efekt osjetila se lijepe na mjesta prethodno obilježena na
gumenoj membrani; osjetila moraju biti prikopčana na A/D konvertor za uređenje
signala; sva tri osjetila se ugađaju u mjerno područje; kablovi se skupe i orjentiraju
prema vertikali kroz kapu ćelije; Hall efekt osjetila se namještaju u mjerno područje.
Slika 4.18. Postavljanje Hall efekt osjetila na uzorak pijeska
Nakon postavljanja i ugađenja Hall efekt osjetila, uzorak se preko hidraulike klipa
kontrolirano podiže kako bi gornja kapa uzorka (silikonski etalon) svojim konkavnim
dijelom (utorom) nalegnula na konveksni dio mjerača sile (Load Cell). Podizanje klipa i
nalijeganje se prati preko računala, a tlak priljubljivanja se obično nameće do
vrijendosti 2 kPa. Nakon priljubljivanja i postavljenih Hall efekt osjetila i Bender
elemenata (BE), prozirni cilindar ćelije se spušta i čvrsto zatvara i puni vodom. Ćelija se
puni destiliranom, deareriranom vodom do polovice kapaciteta, te se u tom trenutku
resetira tlak na crpki za ćelijski tlak kao “nulto stanje” mjerenja (offset). Ćelijski tlak se
zadaje na vrijednost podtlaka “back pressure” (20 kPa), a podtlak se smanjuje u nulu.
Na taj način ćelijskim tlakom od 20 kPa uzorak se drži “stisnut” kako bi održao formu

4. Ispitivanje pijeska u troosnom uređaju 129
valjka. Od ovog stanja, pa nadalje ispitivanje uzorka se obavlja računalnim vođenjem
prema programu.
Kod postavljanja bender elemenata (BE) posebnu pažnju treba posvetiti orijentaciji
sondi na postolju i kapi uzorka, tako da sonde budu u istom smjeru okrenute jedna
prema drugoj (ne okomito jedna na drugu), odnosno da primatelj (reciver) i odašiljatelj
(transmiter) budu u istoj fazi. Pobuda, odnosno odašiljatelj signala je smješten na kapi
uzorka, dok je primatelj signala smješten na postolju uzorka.
Saturacija i konsolidacija uzorka
Izrađeni uzorci su djelomično saturirani sa vlagom od 5-6% pri ugradnji, pa se
potpuna saturacija i konsolidacija uzorka provodila kroz automatizirani modul “satcon”
putem računala. Konsolidacija se odvijala kao izotropna konsolidacija sa različitim
povratnim tlakovima (400 do 500 kPa), a pošto se radi o nekoherentnom materijalu, ista
se odvijala očekivanim tempom (u odnosu na gline). Kapacitet troosnog uređaja
omogućuje konsolidaciju pri većim konsolidacijskim i povratnim tlakovima, no treba
biti pažljiv da se ne prekorače mjerni limiti Hall efekt osjetila. Pažljivim praćenjem
deformacija kod konsolidacije utvrđeno je da su deformacije pri izotropnoj
konsolidaciji uzoraka znatno manje od mjernog područja Hall efekt osjetila, što je
omogućavalo provedbu kontinuiranog pokusa sve do sloma.
Mjerenje B parametra
Nakon konsolidiranja uzorka mjeri se B parametar, kako bi se ocijenio stupanj
saturacije. Mjerenje B parametra izvodi se na slijedeći način: zatvaraju se ventili koji
spajaju crpku za nametanje pornog tlaka s uzorkom; nameću se promjene ćelijskog tlaka
uz održavanje devijatora naprezanje stalnim. Kako je spriječeno dreniranje, promjenom
ćelijskog, dolazi do promjene pornog tlaka, to više što je veći stupanj saturacije.
Najmanje preporučljiva vrijednost B parametra prije početka pokusa smicanja je 0.95
(95%). Prikaz mjerenja B parametra za svaki ispitani uzorak dan je u rezultatima
ispitivanja. B parametar se izračunava prema slijedećem izrazu:

4. Ispitivanje pijeska u troosnom uređaju 130
3σ∆
∆=
uB (4.7)
Gdje su:
∆u = u0 - ukrajnji promjena pornog tlaka pri promjeni ćelijskog tlaka za ∆σ3
u0 porni tlak na početku mjerenja
ukrajnji porni tlak na kraju mjerenja
∆σ3=σ3,0 - σ3,krajnji promjena ćelijskog tlaka
σ3,0 ćelijski tlak na početku mjerenja
σ3,krajnji ćelijski tlak na kraju mjerenja
Mjerenje bender elementima (BE) i troosno smicanje uzorka
Nakon mjerenja B parametra, te utvrđivanja negove zadovoljavajuće vrijednosti,
uzorak se podvrgao mjerenju brzine posmičnih valova metodom bender elementima
(BE). Mjerenje metodom bender elementima detaljno je opisano u poglavlju 3.2.3. Za
potrebe ovoga rada, to je ujedno bilo prvo mjerenje ovom metodom, u laboratoriju na
Građevinskom fakultetu u Zagrebu. BE metodom mjerila se brzina posmičnih valova
odmah na početku pokusa (nakon završetka konsolidacije). Pobuda se zadavala preko
računala u modulu bender elements, uz opciju “Trigger”. Pobuda je sinusoidalnog
oblika (sinusne funkcije) različite amplitude i frekvencije koju sam određuje istraživač,
a može biti i automatski (default). Software troosnog uređaja je automatiziran da sam
određuje brzinu posmičnih valova nakon određivanja početnih i krajnjih točaka signala
vala. Međutim, postupak određivanja točaka signala prepušta se istražitelju.
Za potrebe ovoga rada korištena je metoda očitanja vremena između maksimuma
prvog inicijalnog vala i maskimuma prvog očitanog vala. Mora se navesti da su rezultati
dosta ovisni o subjektivnom očitanju istražitelja. Pošto su to prva mjernja bender
elementima za autora ovoga radava (i istraživače laboratorija), a poznato je da ista
zahtjeva veliko iskustvo, bilo je potrebno dosta puta ponavljati inicijaciju (pobudu), te
eksperimentirati s amplitudom i periodom kako bi se dobio što čišći signal.

4. Ispitivanje pijeska u troosnom uređaju 131
Slika 4.19. Karakterističan zaslon kod mjerenja bender elementima (BE) sa software-om
GDSLAB v 2.1.0.
Troosno smicanje s mjerenjem malih deformacija
Smicanje uzorka se odvijalo kao izotropno konsolidirani drenirani pokus (CID) sa
brzinom smicanja od 0.05 mm/min. Pokus se odvijao monotono bez prekida, osim u
slučaju uzorka S2-100 kada je na kratko, par sekundi, došlo do prekida električnog
napona u laboratoriju (“nestalo struje”), ali se isti nastavio sve do sloma. Upravljanje,
odnosno vođenje pokusa odvija se automatski preko računala kroz modul smicanja u
kojemu se zadaju kriteriji brzine smicanja, smjera smicanja i kriterij završetka smicanja.
Za završetak smicanja odabran je kriterij maksimalne osne deformacije od 20 %
početne visine uzorka što čini pomak od 20 mm.
Upravljački računalni program (software) koji se koristio za upravljanje troosnim
uređajem nosi komercijalni naziv GDSLAB v 1.2.0., tvrtke GDS instruments Ltd.
Računalni software omogućava i razne druge načine smicanja koji su standardizirani
kroz određene module (CIU; CD, UU …itd.) kojima je troosni uređaj opremljen.

4. Ispitivanje pijeska u troosnom uređaju 132
Slika 4.20. Uzorak pijeska u troosnom pokusu sa BE i Hall efekt osjetilima
(Građevinski fakultet u Zagrebu)
Razgradnja uzorka
Po završetku smicanja, ćelijski tlak se otpušta do atmosferskog uz održavanje
devijatora naprezanja stalnim. Kada ćelijski tlak dostigne atmosferski, ispušta se voda iz
ćelije, odvajaju se električni kablovi sa osjetila, skida se šipka load cella i rastavlja se
kapa ćelije. Uzorak sa gumenom membranom se izvlači iz ćelije, stavlja na radni stol,
skida gumena membrana i važe se masa uzorka. Uzorak se stavlja u pećnicu na sušenje
24 sata na temperaturi od 105° C kako bi mu se odredila (suha) masa nakon pokusa.

4. Ispitivanje pijeska u troosnom uređaju 133
4.5. Rezultati smicanja pijeska u troosnom uređaju
S 1_50
0
50
100
150
200
250
300
0 50 100 150 200 250 300
efektivno sferno nap., p' (kPa)
devijator, q (kPa)
S 1_50
0
50
100
150
200
250
300
0 1 2 3 4 5 6 7 8 9 10 11 12
vertikalna deforamcija, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.21. Trag naprezanja q-p′′′′ i q-ε1 dijagram za uzorak pijeska S 1_50

4. Ispitivanje pijeska u troosnom uređaju 134
S 1_50
0
20
40
60
80
100
120
0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,10
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (%)
devijator, q (kPa)
S 1_50
0
5
10
15
20
25
30
35
40
0,000 0,001 0,002 0,003 0,004 0,005 0,006 0,007 0,008 0,009 0,010
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.22. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 1_50, pri malim
deforamcijama mjerenim lokalno sa Hall efekt osjetilima

4. Ispitivanje pijeska u troosnom uređaju 135
S 1_100
0
50
100
150
200
250
300
350
400
0 50 100 150 200 250 300 350 400
efektivno sferno nap., p' (kPa)
devijator, q (kPa)
S 1_100
0
50
100
150
200
250
300
350
400
0 2 4 6 8 10 12 14 16 18 20
vertikalna deforamcija, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.23. Trag naprezanja q-p′′′′ i q-ε1 dijagram za uzorak pijeska S 1_100

4. Ispitivanje pijeska u troosnom uređaju 136
S 1_100
0
20
40
60
80
100
120
140
160
180
200
0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,10
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (%)
devijator, q (kPa)
S 1_100
0
5
10
15
20
25
30
35
40
45
50
0,000 0,001 0,002 0,003 0,004 0,005 0,006 0,007 0,008 0,009 0,010
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.24. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 1_100, pri malim
deforamcijama mjerenim lokalno sa Hall efekt osjetilima

4. Ispitivanje pijeska u troosnom uređaju 137
S 1_200
0
100
200
300
400
500
600
700
0 100 200 300 400 500 600 700
efektivno sferno nap., p' (kPa)
devijator, q (kPa)
S 1_200
0
100
200
300
400
500
600
700
0 2 4 6 8 10 12 14 16 18 20
vertikalna deforamcija, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.25. Trag naprezanja q-p′′′′ i q-ε1 dijagram za uzorak pijeska S 1_200

4. Ispitivanje pijeska u troosnom uređaju 138
S 1_200
0
40
80
120
160
200
240
0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,10
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (%)
devijator, q (kPa)
S 1_200
0
10
20
30
40
50
60
70
0,000 0,001 0,002 0,003 0,004 0,005 0,006 0,007 0,008 0,009 0,010
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.26. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 1_200, pri malim
deforamcijama mjerenim lokalno sa Hall efekt osjetilima

4. Ispitivanje pijeska u troosnom uređaju 139
S 2_50
0
40
80
120
160
200
0 20 40 60 80 100 120 140 160 180 200
efektivno sferno nap., p' (kPa)
devijator, q (kPa)
S 2_50
0
40
80
120
160
200
0 2 4 6 8 10 12 14 16 18 20
vertikalna deforamcija, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.27. Trag naprezanja q-p′′′′ i q-ε1 dijagram za uzorak pijeska S 2_50

4. Ispitivanje pijeska u troosnom uređaju 140
S 2_50
0
20
40
60
80
100
0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,10
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (%)
devijator, q (kPa)
S 2_50
0
5
10
15
20
25
30
0,000 0,001 0,002 0,003 0,004 0,005 0,006 0,007 0,008 0,009 0,010
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.28. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 2_50, pri malim
deforamcijama mjerenim lokalno sa Hall efekt osjetilima

4. Ispitivanje pijeska u troosnom uređaju 141
S 2_100
0
50
100
150
200
250
300
350
400
0 50 100 150 200 250 300 350 400
efektivno sferno nap., p' (kPa)
devijator, q (kPa)
S 2_100
0
50
100
150
200
250
300
350
400
0 2 4 6 8 10 12 14 16 18 20
vertikalna deforamcija, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.29. Trag naprezanja q-p′′′′ i q-ε1 dijagram za uzorak pijeska S 2_100

4. Ispitivanje pijeska u troosnom uređaju 142
S 2_100
0
20
40
60
80
100
120
0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,10
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (%)
devijator, q (kPa)
S 2_100
0
10
20
30
40
50
60
70
0,000 0,001 0,002 0,003 0,004 0,005 0,006 0,007 0,008 0,009 0,010
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.30. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 2_100, pri malim
deforamcijama mjerenim lokalno sa Hall efekt osjetilima

4. Ispitivanje pijeska u troosnom uređaju 143
S 2_200
0
100
200
300
400
500
600
0 100 200 300 400 500 600
efektivno sferno nap., p' (kPa)
devijator, q (kPa)
S 2_200
0
100
200
300
400
500
600
0 2 4 6 8 10 12 14 16 18 20
vertikalna deforamcija, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.31. Trag naprezanja q-p′′′′ i q-ε1 dijagram za uzorak pijeska S 2_200

4. Ispitivanje pijeska u troosnom uređaju 144
S 2_200
0
50
100
150
200
250
0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,10
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (%)
devijator, q (kPa)
S 2_200
0
10
20
30
40
50
60
0,000 0,001 0,002 0,003 0,004 0,005 0,006 0,007 0,008 0,009 0,010
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.32. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 2_200, pri malim
deforamcijama mjerenim lokalno sa Hall efekt osjetilima

4. Ispitivanje pijeska u troosnom uređaju 145
S 3_50
0
25
50
75
100
125
150
175
200
0 25 50 75 100 125 150 175 200
efektivno sferno nap., p' (kPa)
devijator, q (kPa)
S 3_50
0
25
50
75
100
125
150
175
200
0 2 4 6 8 10 12 14 16 18 20
vertikalna deformacija, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.33. Trag naprezanja q-p′′′′ i q-ε1 dijagram za uzorak pijeska S 3_50

4. Ispitivanje pijeska u troosnom uređaju 146
S 3_50
0
20
40
60
80
100
120
0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,10
vertikalna deformacije preko Hall osjetila, εεεε1 1 1 1 (kPa)
devijator, q (kPa)
S 3_50
0
10
20
30
40
0,000 0,001 0,002 0,003 0,004 0,005 0,006 0,007 0,008 0,009 0,010
vertikalna deformacija preko Hall osjetila, εεεε1 1 1 1 (kPa)
devijator, q (kPa)
Slika 4.34. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 3_50, pri malim
deforamcijama mjerenim lokalno sa Hall efekt osjetilima

4. Ispitivanje pijeska u troosnom uređaju 147
S 3_100
0
50
100
150
200
250
300
350
400
0 50 100 150 200 250 300 350 400
efektivno sferno nap., p' (kPa)
devijator, q (kPa)
S 3_100
0
50
100
150
200
250
300
350
400
0 2 4 6 8 10 12 14 16 18 20
vertikalna deformacija, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.35. Trag naprezanja q-p′′′′ i q-ε1 dijagram za uzorak pijeska S 3_100

4. Ispitivanje pijeska u troosnom uređaju 148
S 3_100
0
20
40
60
80
100
120
140
160
0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,10
vertikalna deformacija preko Hall osjetila, εεεε1 1 1 1 (%)
devijator, q (kPa)
S 3_100
0
10
20
30
40
0,000 0,001 0,002 0,003 0,004 0,005 0,006 0,007 0,008 0,009 0,010
vertikalna deformacija preko Hall osjetila, εεεε1 1 1 1 (%)
devijator, q (kPa)
Slika 4.36. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 3_100, pri malim
deforamcijama mjerenim lokalno sa Hall efekt osjetilima

4. Ispitivanje pijeska u troosnom uređaju 149
S 3_200
0
100
200
300
400
500
600
700
0 100 200 300 400 500 600 700
efektivno sferno nap., p' (kPa)
devijator, q (kPa)
S 3_200
0
100
200
300
400
500
600
700
0 2 4 6 8 10 12 14 16 18 20
vertikalna deforamcija, εεεε1 1 1 1 (kPa)
devijator, q (kPa)
Slika 4.37. Trag naprezanja q-p′′′′ i q-ε1 dijagram za uzorak pijeska S 3_200

4. Ispitivanje pijeska u troosnom uređaju 150
S 3_200
0
50
100
150
200
250
0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,10
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (kPa)
devijator, q (kPa)
S 3_200
0
10
20
30
40
50
60
0,000 0,001 0,002 0,003 0,004 0,005 0,006 0,007 0,008 0,009 0,010
vertikalna deformacija mjerena Hall osjetilom, εεεε1 1 1 1 (kPa)
devijator, q (kPa)
Slika 4.38. Naponsko deformacijski odnos (q-ε1) za uzorak pijeska S 3_200, pri malim
deforamcijama mjerenim lokalno sa Hall efekt osjetilima

4. Ispitivanje pijeska u troosnom uređaju 151
4.6. Rezultati mjerenja krutosti pijeska BE metodom
Za potrebe ovoga rada provedeno je mjerenje modula posmika za 9 uzorka pijeska.
Uzorci su grupirani u tri serije različite zbijenosti izražene preko indeksa gustoće (ID), a
svaka serija imala je po 3 (tri) uzorka.
1. serija uzoraka ima prosječan indeks gustoće: ID≈67 %
2. serija uzoraka ima prosječan indeks gustoće: ID≈51 %
3. serija uzoraka ima prosječan indeks gustoće: ID≈79%
Radi jednostavnijeg i preglednijeg praćenja analiza rezultata, oznaka na uzorcima S
predstavlja pijesak (sand), prvi broj je broj serije približno iste zbijenosti, gdje je 1-
srednje zbijen, 2-najmanje zbijen i 3-najjače zbijen. Zadnji broj u oznaci uzorka
predstavlja vrijednost konsolidacijskog efektivnog naprezanja (50 kPa, 100 kPa i 200
kPa) pri smicanju.
Ova podjela nesmije se valorizirati sa uobičajenom (tandardnom) podjelom indeksa
gustoće datoj u poglavlju 4.3. ovoga rada, gdje se stanje pijeska definira kao rahlo sa
ID=0-33(%), srednje zbijeno ID=33-66 (%) i zbijeno ID=66-100 (%). Cilj istraživanja
nije bio uzorke pripremiti u strogim granicama prema navedenoj podjeli već samo da se
međusobno razlikuju u serijama.
Metodom bender elementa (BE) određen je početni modul posmika G za početno
stanje deformacija na uzroku, dok se mjerenje deformacija tijekom smicanja odvijalo
preko Hall efekt osjetla. Sljedeći preporuke proizvođača opreme za mjerenje BE, te
analizirajući preporuke pojedinih autora (Jovičić i dr. 2001) za svaki uzorak provedeno
je više očitanja brzine širenja posmičnih valova na samom startu pokusa. Rezultati
mjerenja i određivanja modula posmika G za svih 9 pokusa dati su narednim tablicama
kako slijedi:

4. Ispitivanje pijeska u troosnom uređaju 152
Tablica 4.1 Laboratorijski podaci i rezultati mjerenja BE uzoraka pijeska 1. serije
Rezultati mjerenja BE za uzorak S 1-50
Red. broj
pokušaja
Vs
(m/s) ρd
(g/cm3)
G
(MPa)
1 185,2 1,470 50,42
2 188,7 1,470 52,34
3 200,0 1,470 58,80
4 204,1 1,470 61,24
5 192,3 1,470 54,36
6 188,7 1,470 52,34
7 185,2 1,470 50,42
Prosječna vrijednost 54,27
Rezultati mjerenja BE za uzorak S 1-100
Red. broj
pokušaja
Vs
(m/s) ρd
(g/cm3)
G
(MPa)
1 217,4 1,479 69,90
2 222,2 1,479 73,02
3 232,6 1,479 80,02
4 238,1 1,479 83,85
5 238,1 1,479 83,85
6 238,1 1,479 83,85
7 243,9 1,479 87,98
8 232,6 1,479 80,02
Prosječna vrijednost 80,31
Rezultati mjerenja BE za uzorak S 1-200
Red. broj
pokušaja
Vs
(m/s) ρd
(g/cm3)
G
(MPa)
1 277,3 1,469 112,96
2 277,8 1,469 113,37
3 277,8 1,469 113,37
4 285,7 1,469 119,91
5 285,7 1,469 119,91
6 294,1 1,469 127,06
7 294,1 1,469 127,06
Prosječna vrijednost 119,09
Oznaka uzorka: S 1-50 S 1-100 S 1-200
Efektivno naprezanje konsolidacije (p′) kPa 50 100 200
Početna visina uzorka (h0) mm 101,0 101,5 101,5
Početni promjer uzorka (D0) mm 50,5 50,1 50,3
Početna gustoća uzorka, (ρd) g/cm3 1,470 1,479 1,469
Masa uzorka prije konsolidacije, (m) gr 297,33 295,769 296,14
Indeks gustoće, (ID) % 66,8 69,7 66,3
Početni koeficijent pora, (e0) 0,83 0,82 0,84
B – parametar 0,99 0,98 0,97
Brzina posmičnih valova (vs) m/s 192,14 233,02 284,72
Modul posmika (G) MPa 54,27 80,31 119,09

4. Ispitivanje pijeska u troosnom uređaju 153
Tablica 4.2 Laboratorijski podaci i rezultati mjerenja BE uzoraka pijeska 2. serije
Rezultati mjerenja BE za uzorak S 2-50
Red. broj
pokušaja
Vs
(m/s) ρd
(g/cm3)
G
(MPa)
1 175,4 1,424 43,81
2 178,6 1,424 45,42
3 185,2 1,424 48,84
4 188,7 1,424 50,71
5 192,3 1,424 52,66
6 192,3 1,424 52,66
7 196,1 1,424 54,76
8 192,3 1,424 52,66
9 185,2 1,424 48,84
Prosječna vrijednost 50,04
Rezultati mjerenja BE za uzorak S 2-100
Red. broj
pokušaja
Vs
(m/s) ρd
(g/cm3)
G
(MPa)
1 200 1,424 56,96
2 200 1,424 56,96
3 208,3 1,424 61,79
4 212,8 1,424 64,48
5 212,8 1,424 64,48
6 212,8 1,424 64,48
7 222,2 1,424 70,31
Prosječna vrijednost 62,78
Rezultati mjerenja BE za uzorak S 2-200
Red. broj
pokušaja
Vs
(m/s) ρd
(g/cm3)
G
(MPa)
1 268,4 1,428 102,87
2 275,7 1,428 108,54
3 268,4 1,428 102,87
4 278,5 1,428 110,76
5 280 1,428 111,96
6 287,3 1,428 117,87
7 292 1,428 121,76
8 292,65 1,428 122,30
Prosječna vrijednost 112,37
Oznaka uzorka: S 2-50 S 2-100 S 2-200
Efektivno naprezanje konsolidacije (p′) kPa 50 100 200
Početna visina uzorka (h0) mm 100,0 100,0 102,0
Početni promjer uzorka (D0) mm 50,2 50,3 50,0
Početna gustoća uzorka, (ρd) g/cm3 1,424 1,424 1,428
Masa uzorka prije konsolidacije, (m) gr 281,70 282,85 285,85
Indeks gustoće, (ID) % 50,5 50,5 51,5
Početni koeficijent pora, (e0) 0,90 0,90 0,89
B – parametar 1,00 1,00 0,98
Brzina posmičnih valova (vs) m/s 187,45 209,96 280,51
Modul posmika (G) MPa 50,04 62,78 112,37

4. Ispitivanje pijeska u troosnom uređaju 154
Tablica 4.3 Laboratorijski podaci i rezultati mjerenja BE uzoraka pijeska 3. serije
Rezultati mjerenja BE za uzorak S 3-50
Red. broj
pokušaja
Vs
(m/s) ρd
(g/cm3)
G
(MPa)
1 192,3 1,502 55,54
2 224,7 1,502 75,84
3 227,3 1,502 77,60
4 227,3 1,502 77,60
5 224,7 1,502 75,84
6 224,7 1,502 75,84
7 220,7 1,502 73,16
Prosječna vrijednost 73,06
Rezultati mjerenja BE za uzorak S 3-100
Red. broj
pokušaja
Vs
(m/s) ρd
(g/cm3)
G
(MPa)
1 230,6 1,509 80,24
2 225 1,509 76,39
3 227,8 1,509 78,31
4 239,2 1,509 86,34
5 238,1 1,509 85,55
6 239,2 1,509 86,34
7 240,4 1,509 87,21
Prosječna vrijednost 82,91
Rezultati mjerenja BE za uzorak S 3-200
Red. broj
pokušaja
Vs
(m/s) ρd
(g/cm3)
G
(MPa)
1 283,9 1,516 122,19
2 282,7 1,516 121,16
3 273,9 1,516 113,73
4 280 1,516 118,85
5 287,5 1,516 125,31
6 281 1,516 119,70
7 290,6 1,516 128,02
8 284 1,516 122,27
Prosječna vrijednost 121,41
Oznaka uzorka: S 3-50 S 3-100 S 3-200
Efektivno naprezanje konsolidacije (p′) kPa 50 100 200
Početna visina uzorka (h0) mm 102,0 100,0 102,0
Početni promjer uzorka (D0) mm 50,4 50,5 50,2
Početna gustoća uzorka, (ρd) g/cm3 1,502 1,509 1,516
Masa uzorka prije konsolidacije, (m) gr 305,52 302,10 305,91
Indeks gustoće, (ID) % 77,3 79,5 81,8
Početni koeficijent pora, (e0) 0,80 0,79 0,78
B – parametar 0,99 0,97 0,97
Brzina posmičnih valova (vs) m/s 220,54 234,40 282,99
Modul posmika (G) MPa 73,06 82,91 121,41

5. Analiza rezultata i usporedba krutosti tala 155
5. ANALIZA REZULTATA I USPOREDBA KRUTOSTI TALA
5.1. Općenito o postupku određivanja modula posmika G
Za potrebe ovoga rada provedeno je ispitivanje ponašanja uzoraka pijeska u
troosnom uređaju pri monotonom smicanju u dreniranim uvjetima (CID pokus).
Vrijednost modula posmika G može se odrediti iz naponsko-deformacijskog odnosa
krivulje τ-γ, gdje je τ posmično naprezanje, a γ relativna posmična deformacija za
prethodno definirano stanje. Tako obično razlikujemo početni sekantni modul posmika
G0, sekantni modul posmika Gs, te tengenti modul posmika Gt za neko stanje
deformacija. Na Slici 5.1. dat je prikaz definiranja modula posmika za određeno stanje
deformacija.
Slika 5.1. Opći prikaz definiranja modula posmika (G0 i Gs i Gt ) iz odnosa τ - γγγγ
(Gsec)0 = Sekantni modul posmika određen sa
početnom točkom O – početni
(Gsec)A = Sekantni modul posmika određen sa
početnom točkom A
(Gtan)A = Tangentni modul posmika određen sa
početnom točkom A

5. Analiza rezultata i usporedba krutosti tala 156
Ovisno o uvjetima dreniranja kod smicanja, pokus može biti drenirani i nedrenirani,
pa treba razlikovati stanje naprezanja i deformacija za pojedine uvjete dreniranja. Stoga
i modlue posmika možemo odrediti za drenirane i nedrenirane uvjete.
Postupak određivanja modula posmika za nedrenirano smicanje
Kod nedreniranog smicanja pretpostavlja se da nema promjene volumena uzorka,
odnosno da je relativna volumna deformacija εv = 0, pa se može pisati:
02 31321 =+=++= εεεεεε v (5.1)
pa se relativna vertikalna deformacija proračunava prema izrazu:
0
1h
h∆−=ε (5.2)
Odnosno, relativna bočna deformacija je
132
1εε −= (5.3)
Iz teorije elastičnosti relativna posmična deformacija se izračunava prema izrazu:
γ = ε1 − ε3 (5.4)
Temeljem prethodnoga iz izraza (5.2), (5.3) i (5.4) može se izračunati da je relativna
posmična deformacija:
1
0 2
3
2
3εγ −=
∆⋅−=
h
h (5.5)
Devijator naprezanja se izračunava po izrazu:
31 σσ −=q (5.6)
Uz mogućnost izravnog mjerenja vertikalne osne sile preko load cell-a (W), devijator
naprezanja se može još izračunati i kao:

5. Analiza rezultata i usporedba krutosti tala 157
A
Wq = (5.7)
gdje je A trenutna poprečna površina uzorka, koja se proračunava prema izrazu:
( )1
2
0 14
επ
+=D
A (5.8)
Posmično naprezanje proračunava se prema izrazu:
2
q=τ (5.9)
Uz korištenje prethodnih izraza, sekantni modul posmika Gs može se dobiti prema
izrazu:
( )0
2
0
0
0 /14/
1
3
1
/
/
3
1
/*2/3
2/
hhDh
hW
hh
AW
hh
qGs
∆−⋅
∆
⋅−=
∆−=
∆−==
πγ
τ
( )hhhD
hWGs
∆−⋅∆⋅
⋅−=
0
2
0
2
0
3
4
π (5.10)
gdje su:
D0 početna vrijednost promjera uzorka (prosječna)
h0 početna udaljenost između dviju referentnih točaka baze LDT osjetila
∆h vertikalni pomak između dviju referentnih točaka baze
W devijatorska vertikalna osna sila (mjerena izravno load cell-om)
Sa Slike 5.1. može se uočiti da je sekantni modul posmika definiran sa dvije točke,
od kojih jedna (prva) točka može biti početak krivulje u ishodištu (nula) ili neka točka
na krivulji (točka A), dok se druga točka odredi za željeno područje deformacija na
krivulji. Obično se druga točka bira tako da linearna aproksimacija mjerenih podataka
devijatora naprezanja (q) i posmične deformacije (γ), određene metodom najmanjih
kvadrata za to područje ima vrijednost R2 veću od 0,96. Tako se Gs može odrediti
pomoću izraza:

5. Analiza rezultata i usporedba krutosti tala 158
γ⋅=
2
qGs (5.11)
Postupak određivanja modul posmika za drenirano smicanje
Kod dreniranog smicanja događa se promjena volumena uzorka, pa je relativna
volumna deformacija različita od nule, εv ≠ . Stoga je potrebno mjeriti promjenu
volumena kako bi se odredila volumna deformacija, odnosno Poisson-ov broj (ν)
1
3
ε
εν = (5.12)
Tada modul posmika možemo izračunati iz izraza (2.14), odnosno:
( )ν+⋅=
12
EG (5.13)
gdje je E Young-ov modul elastičnosti
1ε
qE = (5.14)
O načinu određivanju početnog sekantnog modula posmika pri malim
deformacijama temeljem eksperimentalnih podataka i pripadajućih empiričkih izraza,
detaljno se navodi u poglavlju 5.3.

5. Analiza rezultata i usporedba krutosti tala 159
5.2. Analiza rezultata i usporedba krutosti za pijesak
U prethodnom poglavlju 4. dati su rezultati modula posmika G određenog metodom
BE nakon saturacije i konsolidacije, odmah prije dreniranog smicanja. Za vrijeme
dreniranog smicanja male deformacije su mjerene lokalno preko Hall efekt osjetila. Na
temelju izraza 5.14. možemo pisati da je Young-ov modul elastičnosti:
1
31 )(
E (5.15)
Usporedba krutosti se može izvesti na način da se krutost uzorka izrazi preko
Young-ovog modula elastičnosti u odnosu na vertikalne deformacije 1 dobivene
mjerenjem Hall efekt osjetilima. Za ovakvu interpretaciju usporedbe potrebno je još
poznavati volumenske deformacije ili iste aproksimirati preko Poisson-ovog broja ν. Za
potrebe ovih analiza pretpostavit će se da je Poissonov broj ν=0.1. Za pretpostavke
većeg Poisson-ovog broja, na primjer 0.2 rezultati bi se razlikovali u garanicama do 10
%. Navedeni izrazi vrijede za izotropno stanje naprezanja.
Za analizu rezultata krutosti preko proračunatog Young-ovog modula, koristi se
izraz dobiven iz jednadžbe (5.14) za homogeno izotropno stanje naprezanja:
)1(2 GE (5.16)
Proračunati Young-ovi moduli su na razini početnih deformacija od 10 -5 %. Sličnu
usporedbu krutosti tla na ovakav način dali su Vilhar i Jovičić (2009) za pijesak Boštanj
(Slika 5.10.). Razlika je u tome što je krutost uzorka određena modulom posmika preko
BE metode na razini deformacija od 10-4 %
U radu Wicaksono i dr. (2009), na obrnut način od prethodno navedenog analizirana
je usporedba statičkog GST i dinamičkog modula posmika GD, gdje je GD dobiven TA i
BE metodom, a GST preko Young-ovog modula elastičnosti kroz smicanje za Toyoura
pijesak i Hime šljunak.
Analize usporedbe krutosti za Savski pijesak date su nastavku.

5. Analiza rezultata i usporedba krutosti tala 160
1E-005 0.0001 0.001 0.01 0.1 1vertikalna deformacija, (%)
0
50
100
150
200
250
300
Young-ovmodul,E(MPa)
Savski pijesak
S1-50, plc= 50 kPa, ID = 66,8 %, e0= 0,83S1-100, plc= 100 kPa, ID = 69,7 %, e0= 0,82S1-200, plc= 200 kPa, ID = 66,3 %, e0= 0,84S1 - E dobiven preko G (Bender element)
Slika 5.2. Odnos modula E u dreniranoj troosnoj kompresiji na razini vertikalnihdeformacija ε1 za Savski pijesak (S1). Za usporedbu krutosti, vrijednosti E narazini deformacija od 10-5 % su preračunate preko modula G dobivenog BEmetodom

5. Analiza rezultata i usporedba krutosti tala 161
1E-005 0.0001 0.001 0.01 0.1 1vertikalna deformacija, (%)
0
50
100
150
200
250
300
Young-ovmodul,E(MPa)
Savski pijesak
S2-50, plc= 50 kPa, ID = 50,5 %, e0= 0,90S2-100, plc= 100 kPa, ID = 50,5 %, e0= 0,90S2-200, plc= 200 kPa, ID = 51,5 %, e0= 0,89S2 - E dobiven preko G (Bender element)
Slika 5.3. Odnos modula E u dreniranoj troosnoj kompresiji na razini vertikalnihdeformacija ε1 za Savski pijesak (S2). Za usporedbu krutosti, vrijednosti E narazini deformacija od 10-5 % su preračunate preko modula G dobivenog BEmetodom

5. Analiza rezultata i usporedba krutosti tala 162
1E-005 0.0001 0.001 0.01 0.1 1vertikalna deformacija, (%)
0
50
100
150
200
250
300
Young-ovmodul,E(MPa)
Savski pijesak
S3-50, plc= 50 kPa, ID = 77,3 %, e0= 0,80S3-100, plc= 100 kPa, ID = 79,5 %, e0= 0,79S3-200, plc= 200 kPa, ID = 81,8 %, e0= 0,78S3 - E dobiven preko G (Bender element)
Slika 5.4. Odnos modula E u dreniranoj troosnoj kompresiji na razini vertikalnihdeformacija ε1 za Savski pijesak (S3). Za usporedbu krutosti, vrijednosti E narazini deformacija od 10-5 % su preračunate preko modula G dobivenog BEmetodom

5. Analiza rezultata i usporedba krutosti tala 163
Analizom rezultata primjećuje se da vrijednosti modula posmika G rastu sa
povećanjem efektivnog sfernog naprezanja, što se podudara s trendovima objavljenim u
literaturi kod ispitivanja drugih autora (Bui M.T., 2009)
0 50 100 150 200 250efektivno sferno naprezanje, pl (kPa)
0
50
100
150
200
250
modulposmika,G(MPa)
Savski pijesak
S1 - serija (ID 67 %)
S2 - serija (ID 51 %)
S3 - serija (ID 79 %)
G - dobiven BE metodom
Slika 5.5. Odnos G - p za Savski pijesak, modul G je dobiven BE metodom
Na temelju analiza rezultata ispitivanja za Savski pijesak može se zaključiti da je
krutost izrazito nelinearna, osobito u području malih deformacija, te da ista ovisi o
zbijenosti i konsolidacijskom naprezanju.
Općeniti je zaključak da su rezultati dobiveni ispitivanjima u ovom radu u skladu s
trendovima objavljenim u literaturi.

5. Analiza rezultata i usporedba krutosti tala 164
5.3. Usporedba krutosti tala pri malim deformacijama
U literaturi se mogu naći rezultati brojnih ispitivanja ponašanja tla pri troosnom
smicanju. Kako je na početku ovog rada navedeno da je postojanost tla u svom
prirodnom obliku osnovna karakteritika tla, tako se usporedba krutosti tla može
promatrati različito za pojedine skupine tala. Pošto se u geomehanici tlo uglavnom djeli
na dvije osnovne skupine, na koheretno i nekoherentno, tako će se u tom smislu
promatrati i usporedba krutosti tala, zastupljena njihovim najkarakterističnijim
predstavnicima, a to su pijesak i glina.
5.3.1. Usporedbe krutosti za pijesak
Promatrajući samo pijesak isti se može sagledavati u više varijanti: rahli, srednje
zbijeni, jako zbijeni, pa se rezultati međusobno mogu dosta razlikovati. Generalno
gledajući, mehaničkog ponašanje pijeska može zorno prikazati na rezultatima smicanja
pijeska u troosnom CID pokusu. Istraživanja pokazuju da prilikom smicanja pijeska
dolazi do značajne promjene volumena ugrađenih uzoraka, pri čemu se rahli uzorci
zbijaju, a početno zbijeni razrahljuju (Slika 5.2.). Do promjene volumena dolazi zbog
zrnate strukture pijeska za koju je karakteristično da prilikom smicanja nužno dolazi do
premještanja (preraspodjele) zrna u zoni smicanja, čime se mijenja volumen pora. Ta
pojava se naziva dilatacija pijeska, a među prvima ju je promatrao Reynolds (1885).
Zbog djelovanja dilatacije zbijeni uzorci pijeska postižu veću čvrstoću nego rahli uzorci
pri istom efektivnom naprezanju. Međutim, pokazuje se da pri velikim deformacijama
pijeska u dreniranim uvjetima promjena posmičnih naprezanja jenjava (javlja se tečenje
materijala), pijesak postiže konačnu čvrstoću koja ne ovisi o početnoj zbijenosti uzorka.
Za zbijene pijeske ta je čvrstoća manja od vršne čvrstoće koju pijesak postiže pri znatno
manjim deformacijama. Dodatno se pokazuje da u dreniranim uvjetima pri velikim
deformacijama pijesak postiže konačnu zbijenost koja također ne ovisi o zbijenosti
početnog uzorka, već samo o srednjem efektivnom naprezanju pri slomu. Ispitivanja

5. Analiza rezultata i usporedba krutosti tala 165
pijeska u uvjetima različite zbijenosti i srednjeg efektivnog naprezanja pokazuju da je
opisano stanje sloma jedinstveno za dani pijesak i može se opisati krivuljom u
dijagramu e – p' (Roscoe i dr. 1958). Takvo stanje naziva se kritičnim stanjem, a
krivulja kojom se ono opisuje naziva se linija kritičnog stanja CSL (eng. Critical State
Line). Čvrstoća koju pijesak postiže u tom stanju naziva se čvrstoća za kritično stanje.
Slika 5.6. Opći prikaz mehaničkog ponašanja pijeska pri troosnom CID pokusu smicanju
ovisno o zbijenosti uzorka
Kao što je već spomenuto, početni modul posmika G0 za sve materijale ovisi o
zbijenosti i konsolidacijskom naprezanju. U literaturi se može naći nekoliko autora koji
su temeljem eksperimentalnih podataka izveli veći broj empiričkih izraza za
određivanje početnog modula posmika; Iwasaki, Tatsuoka & Takagi (1978), Kokusho
(1987), Lo Presti i dr. (1993). Evidentno je na temelju svih analiza da posmični modul
rahli pijesak
zbijeni pijesak
zbijeni pijesak
rahli pijesak

5. Analiza rezultata i usporedba krutosti tala 166
ovisi o koeficijentu pora e i srednjem efektivnom naprezanju p′, pa se ovisnost početnog
modula posmika može opisati općim izrazom:
m
refp
pefAG
′⋅= )(0 (5.17)
gdje su:
A konstanta
f(e) analitička funkcija ovisna o koeficijentu pora e
p′ konsolidacijsko naprezanje
pref izabrano referentno naprezanje
m modulski eksponent (bez dimenzionalna veličina)
Važno je napomenuti da je konstanta A ovisna o izboru referentnog naprezanja, pa u
tom slučaju iz izraza 5.17 proizlazi da se za konstantu A može dati sljedeći izraz:
m
ref
ref
p
pAA
⋅=
1
212 (5.18)
gdje pri tome parametru Ai odgovara referentno naprezanje pref i (i=1,2)
Tablica 5.1 Prijedlozi pojedinih autora za odabir parametra elastične posmične krutosti pri vrlo
malim deformacijama za pijesak

5. Analiza rezultata i usporedba krutosti tala 167
Slika 5.7. Utjecaj zbijenosti i naprezanja konsolidacije p′′′′ na G0 kod CIU pokusa
izvedenih na pijesku (Matešić, 2002)
U literaturi se često rezultati ispitivanja krutosti tla pri malim deformacijama jednog
(ili više) autora uspoređuju s odgovarajućim rezultatima iz literature drugih autora, na
način da se uspoređuju krivulje ovisnosti normaliziranog modula posmika o posmičnoj
deformaciji, pri čemu je modul posmika normaliziran početnim modulom (G0).
Pri narednim usporedbama odabrani su neki radovi iz literature s objavljenim
rezultatima ispitivanja.

5. Analiza rezultata i usporedba krutosti tala 168
Slika 5.8. Dijagrami G - γγγγ, rezultata ispitivanja prema nekim autorima
Na slici 5.8. data je usporedba krutosti pijeska Novo Mesto ispitivanog u radu
Matešić, L. (2002) sa različitim sfernim naprezanjima, zatim pokus na Ottawa pijesku
pri efektivnom sfernom naprezanju od 303 kPa predstavljenom u radu Hardin i dr.
(1994), te četiri pokusa predstavljena u radu Li i Yang (1998). Za usporedbu pokusa u
zajedničkom prikazu ucrtana je krivulja predložena u radu Vučtić i Dobry (1991) za
Matešić (2002)
Matešić (2002)
Matešić (2002)
Matešić (2002)

5. Analiza rezultata i usporedba krutosti tala 169
materijale indeksa plastičnosti IP=0, i još tri krivulje dobivene prema analitičkom
izrazu u radu Ishibashi i Zhang (1993), za materijale indeksa plastičnosti IP=0 za
slučajeve efektivnog sfernog naprezanja p’=100, 200 i 300 kPa. Međutim, može se
zaključiti da se krivulje grupiraju u užem području od glinovitih materijala, te da
krivulja predložena u radu Vucetic i Dobry (1991) dobro opisuje ponašanje glinovitih
materijala u području malih deformacija, a znatno lošije u području blizu sloma.
Krivulje dobivene prema analitičkom izrazu u radu Ishibashi i Zhang (1993) vrlo dobro
opisuju mehaničko ponašanje pjeskovitih materijala, za razliku od krivulja za glinoviti
materijal. Općeniti zaključak je da je mehaničko ponašanje pjeskovitih (zrnatih)
materijala manje osjetljivo od glinovitih materijala.
Slika 5.9. Ponašanje tla pri smicanju u ovisnosti o indeksu plastičnosti prema
(Vučetić i Dobry, 1991)
U radu Vilhar i Jovičić (2009) dat je prikaz uporedbe krutosti za muljeviti pijesak
Boštanj. Mjerenja krutosti pri vrlo malim deformacijama kompresijskog dreniranog
smicanja u troosnom aparatu obavljano je BE metodom. Uzorci su izotropno
konsolidirani na različite vrijednosti početnog sfernog naprezanja do 5 MPa.
Određivanje početnog modula posmika obavljano je BE metodom sa višekratnim
ponavljanjima na različitim frekvencijama pobude kako bi se povećala pouzdanost

5. Analiza rezultata i usporedba krutosti tala 170
mjerenja. Početni sekantni modul posmika G0 određen je pomoću tri različite tehnike: a)
nailazak prvog vala, b) metoda promjene faze i c) metodom cross-korelacije. Autori su
opisali sustavne razlike mjerenja u sve tri tehnike, no trendovi ponašanja pijeska,
odnosno usporedbe krutosti pijeska kod pojedinih uzoraka najbolje ilustrira Slika 5.10.
Slika 5.10. Ovisnost posmične krutosti G tijekom drenirane troosne kompresije na nivou
posmičnih deformacija εq i naprezanja p'0 za muljeviti pijesak Boštanj. Za
usporedbu, vrijednosti G0 su dobivene BE metodom i prikazane na slici na
razini deformacija 0.0001 % (Vilhar and Jovičić, 2009)
Pri analizi mehaničkog ponašanja pijeska u disertaciji Bui M.T (2009), te u kasnijoj
disertaciji Sokolić. I. (2010), predložena je materijalna funkcija krutosti pijeska pri
malim deformacijama, u skladu sa općim izrazom za opisivanje krutosti raznih vrsta tla
(5.17). Može se pokazati da funkcija vrlo dobro obuhvaća gotovo sve izraze u rasponu
koeficijenta pora od 0.3 do 1.3 (Slika 5.11.), a ista se može pisati kao:

5. Analiza rezultata i usporedba krutosti tala 171
m
rp
p
e
AG
′
+=
30 )1( (5.19)
Izraz ima prednost što je funkcija od 1+e, pa to može biti pogodno pri njenoj
integraciji.
Slika 5.11. Posmicni modul ni G0 pri vrlo malim deformacijama i srednjem efektivnom
naprezanju od 0.1 MPa. (Sokolić, 2010)
Sa slike se uočava da krutost pijeska znatno ovisi o veličini koeficijenta pora pri
istom sfernom naprezanju. Ti trendovi su u skladu s objavljenim rezultatima drugih
autora.
U novijim istraživanjima u radu Y. Wang and C.W.W. (2005) ispitivani su uzorci
sedimentiranog pijeska iz Yen Chow ulice u Sham Shui Po na poluotoku Kowloon,
Hong Kong. U radu se opisuje sustavno laboratorijsko ispitivanje intaktnog tla potpuno
razgrađenog granita (CDG) od malih deformacija do sloma. Netaknuti su uzorci uzeti s
lokalnog mjesta koristeći tehnike uzorkovanja Mazier (Geotehnički Control Office
1990). Raspadnuta stijena, odnosno raspadnuti granitni pijesak podvrgavan je raznim

5. Analiza rezultata i usporedba krutosti tala 172
troosnim naprezanjima, uključujući dreniranu kompresiju i ekstenziju. Početna krutost
mjerena je pomoću bender elemenata, a male lokalne deformacije sa tri Hall efekt
osjetila (Clayton and Khatrush 1986). Mjerenja iz Bender elemenata pokazuju da se
modul posmika povećava sa srednjim efektivnim naprezanjem pri kojem se smanjuje
koeficijent pora. Rad je zanimljiv jer daje prikaz normaliziranog modula posmika za
drenirana naprezanja u kompresiji i extenziji (Slika 5.12.).
Slika 5.12. Usporedbe Normaliziranog modula posmika u kompresiji i extenziji
(Y. Wang and C.W.W., 2005)
U radu Wicaksono, R.I. i dr., (2008) analizirana je usporedba krutosti Toyoura
pijeska i Hime šljunka za mala ciklička opterećenja u suhim i zasićenim uvjetima pri
različitoj gustoći. Autori su za potrebe ispitivanja krutosti koristili dvije metode mjernja
modula posmika: TA metodu (eng. Trigger Accelerometer) i BE metodu (eng. Bender
Elements). Za modul posmika određen TA i BE metodom okarakteriziran je kao
dinamički modul GD, a modul posmika preračunat iz Young-ovog modula elastičnosti
za izotropno stanje nazvan je statičkim posmičnim modulom Gsta.

5. Analiza rezultata i usporedba krutosti tala 173
Slika 5.13. Young-ov modul kao rezultat cikličkih opterećenja
(Wicaksono i dr., 2008)
Pošto TA i BE metoda spadaju u tzv. dinamičke metode, Young-ov modul dobiven
iz malih cikličkih opterećenja je pretvoren u statički modul posmika, uz pretpostavku za
izotropno stanje naprezanja, pa vrijedi:
)1(2 ν+⋅= S
sta
EG (5.20)
Vrijednosti Poisson-ovog broja ν može se uzet da je 0.17 prema (Hoque, 1996) ili
0.2 za Toyoura pijeska i šljunak Hime (De Silva, 2004).
Samo za TA metodu može se pisati da je 2PD VE ⋅= ρ (5.21)
Za TA i BE metodu može se pisati da je 2SD VG ⋅= ρ (5.22)
gdje su VP i VS valne brzine koje odgovaraju P i S valovima. U radu je dinamički
Young-ov modul ED pretvoren u dinamički modul posmika GD korištenjem jednadžbe
(5.23) uz pretpostavku izotropnog stanja naprezanja:
)1(2 ν+⋅= D
D
EG (5.23)

5. Analiza rezultata i usporedba krutosti tala 174
Slika 5.14. Tipični rezultati za Toyoura pijesak u suhom i zasićenom stanju
(Wicaksono i dr., 2008)
Analizom rezultata zaključuje se da dinamičkim mjerenjima pomoću BE metode
dobivamo manje vrijednosti modula posmika GD u odnosu na TA metodu (Slika 5.16.)
Razlike u rezultatima mjerenja dinamičkog modula posmika između dviju metoda
TA i BE, leži u tome što kod BE metode je više izražen učinak naljeganja, odnosno tzv.
„bedding“ pogreške na sučelju između Bender elementa i uzorka.
Kao što je prikazano na Slici 5.15. kada je BE sonda savijena, ostaju veće šupljine i
javlja se lokalno labava (šuplja) zona kod šljunčanog tla u odnosu na pješčano tlo, što
rezultira dužem vremenu putovanja vala i manjem dinamičkom modulu posmika
(Wicaksono, 2007).

5. Analiza rezultata i usporedba krutosti tala 175
Slika 5.15. Efekt „bedding“ pogreške u BE metodi (Wicaksono, i dr. 2009)
Opravdanje razlika između statičkih Gsta i dinamičkih GD modula mogu se tražiti u
heterogenosti uzorka. U statičkom mjerenju, krutost modula odražava krutost za ukupni
presjek uzorka. S druge strane kod dinamičkog mjerenja val putuje kroz najkraći put što
kod uzorka s većim česticama može biti kraći, pa time ispitivanje rezultira većim
modulom krutosti u odnosu na krutosti kod modula u statičkim mjerenjima (Maqbool,
2005).
Slika 5.16. Usporedba modula GD i Gsta za Toyoura pijesak i Hime šljunak
(Wicaksono i dr., 2009)
Proučavajući rezultate raznih autora iz literature, zaključuje se da krutost zrnatih tala
značajno ovisi o koeficijentu pora i efektivnom sfernom naprezanju.
Na Slici 5.17. dat je pregled značajnijih istraživanja za pojedine vrste zrnatih i
nezrnatih tala u novije vrijeme.

5. Analiza rezultata i usporedba krutosti tala 176
Slika 5.17. Normalizirani modul posmika u korelaciji sa koeficjentom pora za razna tla
(Bui M.T., 2009)

5. Analiza rezultata i usporedba krutosti tala 177
5.3.2. Usporedbe krutosti za glinu
Iz literature je poznato da početni modul G0 za sve materijale ovisi o zbijenosti i
sfernom konsolidacijskom naprezanju p′. Za koherentne materijale čiji je indeks
plastičnosti IP>0, početni modul posmika G0, ovisi i o prethodnom opterećenju.
Normalizirani prikaz početnog modula u odnosu na naprezanje konsolidacije p′c,
prikazuje Slika 5.18. Krutost se izražava preko početnog modul posmika, koji je
normaliziran umnoškom bezdimenzionalne konstante A=3300, i funkcije ovisnom o
koeficijentu pora f(e)=3300*(2,97-e)2/(1+e), prema izrazu predloženom u radu Hardin i
Black (1968) za kaolinsku glinu. Može se uočiti da za ista prethodna opterećenja
početni modul raste povećanjem konsolidacijskog naprezanja. Ti trendovi su u skladu s
onima objavljenim u literaturi drugih autora.
Slika 5.18. Utjecaj zbijenosti, prethodnog opterećenja i naprezanja konsolidacije na G0
kod pokusa izvedenih na glini (Matešić, 2002)

5. Analiza rezultata i usporedba krutosti tala 178
Za usporedbu pokusa izvedenih na glini, dat je prikaz rezultata obavljenih pokusa;
Matešić (2002), pokus K4 predstavljen u radu Shibuya i dr. (1995), pokuse D24-1 i
D24-2 predstavljeni u radu Mukabi i Tatsuoka (1999). Zajednički prikaz tih pokusa
prikazuje Slika 5.19.
Slika 5.19. Dijagrami G - γγγγ, rezultata ispitivanja prema nekim autorima
Pored rezultata navedenih pokusa u zajedničkom prikazu ucrtana je krivulja
predložena u radu Vučetić i Dobry (1991) za materijale indeksa plastičnosti IP=30, te tri
Matešić, L. (2002)
Matešić, L. (2002)
Matešić, L. (2002)
Matešić, L. (2002)

5. Analiza rezultata i usporedba krutosti tala 179
krivulje dobivene prema analitičkom izrazu u radu Ishibashi i Zhang (1993), za
materijale indeksa plastičnosti IP=30 za slučajeve efektivnog sfernog naprezanja,
p’=100, 200, 300 kPa. Prema prikazu može se zaključiti da se krivulje grupiraju u širem
rasponu te da krivulja predložena u radu Vucetic i Dobry (1991) dobro opisuje
ponašanje glinovitih materijala u području malih deformacija, a znatno lošije u području
blizu sloma. Krivulje dobivene prema analitičkom izrazu u radu Ishibashi i Zhang
(1993) precjenjuju linearno ponašanje glinovitih materijala u području malih
deformacija. Općeniti zaključak je da je mehaničko ponašanje glinovitih materijala
izrazito osjetljivo na niz utjecaja.
Izuzetno dobru analizu usporedbe krutosti različitog prirodnog (koherentnog) tla pri
malim deformacijama daje rad Clayton, C. R. I. & Heymann, G. (2001). Autori su
ispitivali tri vrste tla: Bothkennar glinu, Londonsku glinu i vrlo poroznu kredu. Lokalno
mjerenje malih deformacija obavljano je preko LVDT reda veličine do 10-4 %.
Ispitivanja smicanja su bila dugotrajna kako bi se smanjio utjecaj puzanja na kvalitetu
formiranja naponsko deformacijskog odnosa.
Slika 5.20. Naponsko deformacijski odnos za prirodno mekanu glinu
(Smitt, 1992., pruzeto iz Clayton & Heymann, 2001)

5. Analiza rezultata i usporedba krutosti tala 180
Mjerenja krutosti su provedena tijekom nedreniranog monotonog smicanja u
toosnom aparatu. Deformacije mjerene izvan ćelije odgovarale su naprezanjima od 1 do
2 % po danu za obje gline i oko 0.3 % dnevno za kredu. Učinci na puzanje su smanjeni
na prihvatljivu razinu uvodeći odmor između svakog učitavanja. Usporedba rezultata
krutosti za pojedinu glinu i kredu, daje Slika 5.21.
Slika 5.21. Usporedba krutosti tla za tri različite vrste tla; Londonsku glinu,
Bothkennarsku glinu i poroznu kredu (Clayton & Heymann, 2001)

5. Analiza rezultata i usporedba krutosti tala 181
Slika 5.22. Normalizirana krutost na 0,001 % deformacija za Londonsku glinu,
Bothkennarsku glinu i poroznu kredu (Clayton & Heymann, 2001.)
Iz usporedbe krutosti tla gline i krede, može se zaključiti da u izotropnom stanju
naprezanja kod monotonog nedreniranog smicanja modul posmika izrazito raste sa
smanjenjem deformacija ili obratno. Uočava se da odnos naprezanja i deformacija
postaje izrazito nelinearan s porastom deformacija do 0,1 % i odgovarajućim padom
krutosti i do deset puta (Jardine i dr., 1984).
Na Slici 5.23. data je usporedba krutosti za razna tla (gline, pijesci,...) prema
novijim istraživanjima (Bui, M.T., 2009).

5. Analiza rezultata i usporedba krutosti tala 182
Slika 5.23. Usporedba krutosti tla data preko odnosa Gmax–e (Bui M. T., 2009)

6. Zaključci i smjernice 183
6. ZAKLJUČCI I SMJERNICE
U sklopu ovog rada provedena je analiza usporedbe krutosti tla gline i pijeska, te je
dat pregled važnijih mjernih tehnika kojima se ta ista krutost može odrediti. Navedene
su tehnike mjerenja deformacija u laboratoriju i na terenu, a posebno je obrađena
tehnika mjerenja bender elementima (eng. Bender Elements), skraćeno BE metoda.
Razlog tomu je što je navedena tehnika po prvi puta primjenjena u laboratoriju Zavoda
za geotehniku na Građevinskom fakultetu Sveučilišta u Zagrebu. Upravo kroz ovaj rad
je potvrđena i uhodana tehnika mjerenja malih deformacija BE metodom na
građevinskom fakultetu u Zagrebu. Rezultati izvedenih ispitivanja pokazuju
primjenjivost tehnologije ispitivanja mehaničkog ponašanja pijeska u cijelom području
od vrlo malih deformacija do sloma, na istom uzorku.
Pregledom objavljenih rezultata u literaturi može se konstatirati da ima relativno
mali broj radova u kojima su obavljeni pokusi sa mjerenjima BE metodom, što je i za
očekivati jer je od svih navedenih zadnja uvedena u geotehničke laboratorije, a ista se
intezivnije počela primjenjivati zadnjih sedam-osam godina. Ispitivanja predstavljena u
ovom radu daju bitan doprinos u području mehanike tla, osobito u primjeni BE metode.
Uvodeći ovu metodu kao primjenljivu u geotehnički laboratorij Građevinskog fakulteta
u Zagrebu, prate se trendovi u dostignućima mjerene tehnike, a ista ga svrstava u rang
sličnih kod nas u Europi i u svijetu.
U sklopu izrade ovoga rada provedena su eksperimentalna istraživanja ponašanja
uzoraka pijeska iz rijeke Save u okolici grada Zagreba, s ciljem određivanja krutosti tla
pri malim deformacijama u troosnom uređaju uz primjenu BE metode. Provedena su
ispitivanja Savskog pijeska na 9 uzoraka u tri serije sa različitim zbijenostima i
različitim sfernim naprezanjima, pri dreniranoj kompresiji u troosnom uređaju. Točnije
proveden je troosni kompresijski izotropno konsolidirani drenirani pokus (CID), sa
mjerenjem od malih deformacije pa do sloma u kontinuitetu.
Analizom rezultata pokusa iz ovoga rada, kao i onih objavljenih iz literature
nedvojbeno potvrđuju tezu o nelinearnom elastičnom ponašanju pijeska i krutih glina.
Oni su pokazali dvije važne novosti. Prvo, u području malih deformacija ponašanje tla,
pijeska pa i krutih glina, izrazito je nelinearno. Posmična krutost tla u području

6. Zaključci i smjernice 184
posmičnih deformacija pada s njihovim porastom. Drugo, posmična je krutost tla pri
malim deformacijama izrazito puno veća od krutosti pri većim deformacijama.
Usporedbom krutosti tla zaključuje se da su ovisnosti posmične krutosti o relativnoj
posmičnoj deformaciji dobivene opisanom tehnologijom za monotona (statička)
opterećenja sukladna već ranije poznatim ovisnostima dobivenih iz dinamičkih
laboratorijskih pokusa (Atkinson i Sallfors, 1991, Cascante i dr. 2003, Youn i dr. 2008,
Wicaksono i dr. 2008). Naime, dugo se smatralo da su postoji velika razlika u
rezulatima dobivenim dinamičkim opterećenjima u odnosu na one dobivene u statičkim
oterećenjima. Tako je nova tehnologija mjerenja malih deformacija u laboratoriju
potvrdila beznačajnu razliku između dinamičke i statičke krutosti tla (Wicaksono i dr.
2008).
Analizom i usporedbom krutosti pijeska (zrnatih materijala) u naponsko
deformacijskom odnosu je redovito nelinearno. Ta nelinearnost ponašanja zrnatih
materijala pripisuje se ovisnosti krutosti pijeska i čvrstoće o stanju i tragu naprezanja,
gustoći, smjeru i brzini deformacije te drugim pojavama (Jefferies & Been 2006.).
Međutim, svojstvo promjene volumena prilikom smicanja izraženo je čak i u uvjetima
konstantnog izotropnog naprezanja. Ta pojava naziva se dilatacija i jedan je od glavnih
uzroka promjene čvrstoće i krutosti pijeska tokom smicanja. Na temelju brojnih
istraživanja razvijaju se i određeni konstitucijski modeli kojima se pokušava na što bolji
i jedinstven način opisati pojedino ponašanje zrnatih materijala. No svaki takav model
potvrđen eksperimentalnim istraživanjima može dati pouzdane i uporabljive rezultate.
Doprinos ovoga rada je u tome što je upravo kroz ovaj rad potvrđena i uhodana
tehnika mjerenja malih deformacija BE metodom na građevinskom fakultetu u Zagrebu.
Međutim, temeljem prethodno obavljenih istraživanja i analiza usporedbe krutosti tla
pri malim deformacijama, nužno je potrebno usmjeriti daljnja istraživanja u smjeru
ispitivanja šireg spektra materijala, kako bi se dobila potpunija slika o cjelovitijem
ponašanju krutosti tla.

7. Reference 185
7. RFERENCE Addo, K.O.; Robertson, P. K., (1992): Shear-wave velocity measurement of soil using
Rayleigh waves. Canadian Geotechnical Journal, 29(4): 558-568.
Anderson, D.J.; Richart Jr., F.E. (1976), Effects of straining on shear modulus of clays. ASCE Jour. Geotechnical Engineering Division 102(9): 975-987.
AnhDan, L.Q.; Koseki, J. and Sato, T. (2002): Comparison of Young’s Moduli of Dense Sand and Gravel Measured by Dynamic and Static Methods. Geotechnical Testing Journal, ASTM, Vol. 25 (4), pp. 349-368.
Arulnathan, R.; Boulanger, R and Riemer, M. (1999): Analysis of Bender Element tests. Geotechnical Testing Journal, GTJODJ, Vol. 21, No.2, pp. 120-131.
Atkinson, J.H. (2000): Non-linear soil stiffness in routine design. Geotechnique 50, No5, 487 - 508.
Atkinson, J.H., Evans, J.S., Scott, C.R., (1985): Developments in stress path equipment formeasurements of soil parameters. Ground Engineering, Vol. 18, No. 1, 15-22.
Atkinson, J.H.; Bransby, P.L., (1978): The Mechanics of Soils: An Introduction to Critical State Soil Mechanics, McGraw-Hill.
Atkinson, J.H.; Sallfors, G., (1991): Experimental Determination of Stress-Strain-Time Characteristics in Laboratory and In Situ Tests. Proc. Tenth European Conf. Soil Mechanics and Foundation Engineering, Florence, 26-30 May, Balkema, Rotterdam, Vol. III, str. 915-956.
Awad Al-K.; Abdulhafiz A. (2006): Modeling of Stress- Strain Curves of Drained Triaxial Test on Sand. American Journal of Applied Sciences 3 (11): 2108-2113, ISSN 1546-9239
Barbour, S. L. (1998): Ninteenth Canadian Geotechnical Cololloquium: The soil water characteristic curve: a historical perspective. Canadian Geotechnical Journal, 35 (5): 873-894.
Bellotti, R.; Jamiolkowski, M.; Lo Presti, D.F. and O’Neill, D.A. (1996): Anisotropy of small strain stiffness in Ticino sand. Géotechnique 46, No. 1, pp. 115-131.
Bishop A.W. & Wesley, L.D., (1975): A hydraulic triaxial apparatus for controlled stress path testing. Geotechnique, Vol.25, No.4, 657-670.
Bjerum, L.; Landava, A., (1965): Direct simple-shear tests on Norwegian quick clay. Geotechnique, 16(1): 1-20

7. Reference 186
Bolton, M.D. and Wilson, J.M.R. (1989): An experimental and theoretical comparison between static and dynamic torsional soil tests. Géotechnique 39, No.41, pp. 585-599.
Brezinščak (1971): Mjerenje i računanje u tehnici i znanosti, Tehnička knjiga, Zagreb
Brignoli, E.G.M and Gotti, M. (1992): Misure della velocita di onde elastiche di taglio in laboratorio con l’impiego di trasduttori piezoelettrici. Riv. Ital. Geotec, Vol. 26, No. 1, pp. 5-16.
Brignoli, E.G.M, Gotti, M. and Stokoe, K.H. (1996): Measurement of shear waves in laboratory specimens by means of piezoelectric transducers. Geotechnical testing journal, GTJODJ, Vol. 19, No. 4, pp. 384-397.
Britto, A.M. and Gunn, M.J., (1987): Critical State Soil Mechanics via Finite Elements. John Wiley & Sons, Inc.
Bui, M.T., (2009): Iinfluence of some particle characteristics on the small strain response of granular materials, PhD thesis, University of Suthampton
Burland, J.B. (1989): "Small is beautiful"-the stiffness of soils at small strains. Canadian Geotechnical Journal. 26: 499-516.
Burland, J.B. (1990): On the compressibility and shear strength of natural soils. Géotechnique, 40, No. 3, pp. 329-378.
Burland, J.B.; Symes, M.J. (1982): A Simple Axial Displacement Gauge for Use in the Triaxial Apparatus, Géotechnique, Vol. 32, str. 62-65.
Carter, M.; Bentley, S.P., (1985): Corelations of Soil Properties, Pentech Press-Publishers: London
Cascante, G., Vanderkooy, J., Chung, W., (2003): Difference between current voltage measurements in resononant-column testing, Canadian Geotechnical Journal, 40: 806-820.
Chee-Ming Chan, (2010): Bender Element Test in Soil Specimens:Identifying the Shear Wave Arrival Time, EJGE, Vol. 15, p. 1263-1276
Clayton, C. R. I. & Heymann, G. (2001): Stiffness of geomaterials at very small strains, Géotechnique 51, No. 3, 245±255
Clayton, C.R.I.; Khatrush, S.A., Bica, A.V.D., Siddique, A., (1989): The Use Hall Effect Semiductors in Geotechical Instrumentation, Geotechnique Testing Journal, GTJODJ: 12(1): 69-76
Clayton, C.R.I.; Khatrush, S.A. (1986): A new device for measuring local axial strains on triaxial specimens. Géotechnique 36: 593-597.
Coop, M.R. and Jovičić, V. (1999): The influence of state on the very small strain stiffness of sands. Proc. 2nd Intl. Sym. on pre-failure deformation

7. Reference 187
characteristics of geomaterials,(IS Torino ‘99) Balkema, Rotterdam, pp.- 175-181.
Costa Filho, L de M. (1980): A Laboratory investigation of the small strain behaviour of London Clay. PhD. Thesis, Imperial College of Science, Technology and Medicine, University of London.
Cuccovillo, T. & Coop, M. R. (1997): The measurement of local axial strains in triaxial tests using LVDTs. Geotechnique. Vol. 47, no. 1, pp. 167-71
Das, B.M., (1985): Advanced Soil Mechanics, International Student Edition, McGraw-Hill Book Company
Doroudian, M.; Vučetić, M., (1995): A direct Simple Shear for Measuring Small-Strain Behaviour. Geotechnical Testing Journal, GTJODJ: 18(1): 69-85
Duncan, J.M.; Chang, C.Y., (1970), Nonlinear analysis of stress and strain in soils. Journal of the Soil Mechanics and Foundations Division, ASCE, vol. 96, no. SM5, pp. 1629-1654.
Dyvik, R. and Madshus, S. (1985). Laboratory measurements of Gmax using bender elements. Proc. ASCE Convention, Detroit, pp. 186-196.
Fernandez, A.L. and Santamarina J.C. (2001): Effect of cementation on the small-strain parameters of sands. Canadian Geotechnical Journal, 38: 191-199.
Ferreira, C., Viana da Fonseka, A., Santos, J.A., (2006): Comparison of simultaneous Bender elements and Resonants column tests on Porto residual soil, Soil Stress-Strain Behavior: Measurement, Modeling and Analysisi Geotechnical Symposium in Roma, Hoe I. Ling et al.(eds.), str. 523-535.
Fredlund, D.G.; Rahardjo, H., (1993): Soil Mechanics for Unsaturated Soils. John Wiley & Sons, Inc.
Goto, S., Park, C.-S., Tatsuoka, F. and Molenkamp, F. (1993): Quality of the lubrication layer used in element tests on granular materials. Soils and Foundations, Vol. 33, No. 2, pp. 47-59.
Goto, S.; Tatsuoka, F.; Shibuya, S.; Kim, Y.S. & Sato, T. (1991): A Simple Gauge for Local Strain Measurements in the Laboratory, Soils and Foundations, Vol. 31, No. 1, str. 169-180.
Griffiths, D.V.; Prevost, J.H., (1990): Stress-strain curve generation from simple triaxial parameters. J. Number. Analyt. Methods Geomech.: 14, 587-594
Hardin, B.O.; Black, W.L., (1968): Vibrations moduls of normally connsolidated clay. Journal of the Soil Mechanics and Foundations, ASCE, Vol. 94., No. SM2, pp 353-369
Hardin, K.O.; Drnevich, V.P., Wang, J. & Clay, E., (1994): Resonant Column Testin and Pressure up to 3,5 MPa (500 psi). Dynamic Geotechnical testing II, ASTM STP 1213

7. Reference 188
Hiltunen, D. R.; N. Gucunski (1994): Annotated bibliography on SASW. In: R. D. Woods (ed.), Geophysical characterisation of sites, Volume prepared by XIII ISSMFE Technical Committee # 10 for XIII ICSMFE, 1994, New Delhi, India. Rotterdam: Balkema. 27-34.
Holtz, R.D.; Kovacs, W.D., (1981): An intruduction to geotechical engineering, Prentice-Hall civil engineering and engineering mechanics series, Prentice-Hall Inc. Englewood Cliffs, New Jersey
Hong, W. P. and Lade, P. (1989):. Strain increment and stress directions in torsion shear tests. Journal of geotechnical engineering ASCE, , Vol. 15, No. 10, pp. 1388-1401.
Hoque, E., Sato, T. and Tatsuoka, F. (1997): Performance evaluation of LDTs for use in triaxial tests. Geotechnical testing journal, GTJDJ, ASTM, Vol. 20, No. 2, pp. 149-167.
ICSMFE (1977): Constitutive Equations of Soils, Proceedings of Spaciality Session 9, IX International Conference on Soil Mechanics and Foundation Engineering, Tokyo, 310 p.
Ishibashi, I.; Zeng, X., (1993): Unified dinamic shear moduli and damping rations of sand and clay, Soils and Foundations, Vol. 33, No. 1, pp. 182-191
Ishihara, K. (1982): Evaluation of soil properties for use in earthquake response analysis. Proceedings, International Symposium on Numerical Models in Geomechanics. Zurich, 13-17 Sept. Balkema, Rotterdam. 237-259.
Ishihara, K., (1996): Soil Behaviour in Earthquake Geotechnics, Claredon Press-Oxford University Press
ISSMFE (1985), Constitutive Laws of Soils, Report of ISSMFE Subcommittee on Constitutive Laws of Soils and Proceedings of Discussion Session IA, XI International Conference on Soil Mechanics and Foundation Engineering, San Francisco, 175 p.
Iwan, W.D. (1967): On a class of models for the yielding behavior of continuous and composite systems. Journ. of Applied Mechanics 34(3): 612-617.
Iwasaki, T.; Tatsuoka, F. and Takagi, Y. (1978): Shear moduli of sands under cyclic torsional shear loading, Soils and Foundations, Vol. 18, No. 1, pp. 39-56
Jardine, R.J.; Potts, D.M.; Fourie, A.B. & Burland, J.B. (1986), Studies of the influence of non-linear stress-strain characteristics in soil-structure interaction. Géotechnique 36: 377-396.
Jardine, R.J.; Symes, M.J.; Burland, J.B. (1984): The Measurement of Soil Stiffness in the Triaxial Apparatus, Géotechnique, Vol. 34 str. 323-340.
Jovičić, V. (1997): The Measurement and Interpretation of Small Strain Stiffness of Soils, PhD thesis, The City University, London.

7. Reference 189
Jovičić, V., Coop, M., Simpson, B., (2006): Interpretation and modelling of deformation characteristics of a stiff North Sea clay. Can. Geotech. J. 43: 341–354
Kokusho, T., (1950): Cyclic triaxial test of dynamic soil properties for wide strain range, Soils and Foundations, Vol. 20, No. 1, pp. 45-60
Kokusho, T., (1987): In situ dynamic properties and their evalution. Proceedings of the 8th Asian Regional Coference on Soil Mechanics and Foundation Engineering, Kyoto, Vol. 2, pp. 215-435
Kovačević, M.S., (1994): Nelinearni model odziva temeljnog tla na seizmičku pobudu. Magistarski rad, Sveučilište u Zagrebu Građevinski fakultet, Zagreb
Kovačević, M.S., (1999): Numerička simulacija nelinearne interakcije konstrukcije i tla, Doktorska disertacija, Sveučilište u Zagrebu Građevinski fakultet, Zagreb
Ladd, C. C.; Foot, R.; Ishihara, K.; Schlosser F. & Poulos, H.G., (1977): Stress-deformation and strength characteristics. Proc. Ninth Int. Conf. Soil Me-chanics and Foundation Engineering, Tokyo, Vol. 3, 421-494.
Lade, P.V.; Nelson, R.B., (1987): Modelling the Elastic Behaviour of Granular Materials, International Journal for Numerical and Analytical Methods in Geomechanics, Vol. 11, p.p. 521-542
Li, X.S.; Yang, W.L., (1998): Effects of Vibration History on Moduls and Damping of Dry Sand. Journal of Geotechnical and Geoenviromental Engineering: 124(11): 1071-1081
Lo Presti, D.C.F.; Pallara, O.; Puci, I., (1995): Small Strain Measurements during triaxial test: many problems, some solutions. Proceedings International Coference Hokkaido ′94: Pre-failure Deformation of Geomaterials, Balkema, Rotterdam, Vol. 1, 11-16
Magbool, S., Sato, T., Koseki, J. (2007): Dynamically and Statically Measured Small Strain Stiffness of Dense Toyoura Sand, Soil Stress-Strain Behavior: Measurement, Modeling and Analysis, Solid Mechanics and Its Applications, Vol.146, Part 7, 595-604
Mancuso, C., Vassallo, R., d′Onofrio, A., (2002): Small strain behavior of a silty sand in controlled-suction resonant column – torsional shear test, Canadian Geotechnical Journal, 39: 22-31.
Marti, J., & Cundall, P.A. (1982). Mixed dicretization procedure for accurate solution of plasticity problems. International Journal Numerical Methods in engineering, 6, pp. 129-139.
Martin, W.O.; McCoy & J.W.; Hunt, D.D. (1986): Settlement of a Reactor on Sand, Proc. Session Sponsored by the Geotechnical Engineering Division in Conjunction with the ASCE Convention in Seattle, Washington, April 10, 1986. Geotecnical Special Publication No. 5; ASCE, New York, str. 74-90.

7. Reference 190
Masing, G., (1926): Eigenspannungen und Verfestigung beim Messing. In Proc. 2nd intern. congr. applied mechanics, Zürich.
Matešić, L., i Vučetić, M., (2001): Strain-Rate Effect on Secant Shear Modulus of Soils at Small Cyclic Strains. Journal of Geotechnical and Geoenvironmental Engineering
Matešić, L.; (2002): Normalizirano ponašanje tla pri smicanju od vrlo malih deformacija do sloma, Disertacija, Sveučilište u Zagrebu Građevinski fakultet
Matešić, L.; Vučetić, M., (2001): Strain-Rete Effect on Secant Shear Moduls of Soils at Small Cyclic Strains. Journal of Geotechnical and Geoenvironmental Engineering
Mukabi, J.N.; Tatsuoka, F., (1999): Effects of Stress path and agieng in reconsolidation on deformation chaacteristics of stiff natural clays. Proceedings International Coference Torino ′99: Pre-failure Defirmation of Goematerials, Balkema, Rotterdam, Vol. 1, 131-140
Nazarian, S. & Stokoe, K.H. (1983). Use of spectral analysis of surface waves for determination of moduli and thicknesses of pavement systems. Transportation Research Record. No. 954.
Nazarian, S. (1984). In Situ Determination of Elastic Moduli of Soil Deposits and Pavement Systems by Spectral-Analysis-of-Surface-Waves Method. Dissertation, The University of Texas at Austin, 453 pp.
Nonveiller, E. (1989): Mehanika tla i temeljenje građevina (3. izdanje). Udžbenici Sveučilišta u Zagrebu, Školska knjiga, Zagreb
Okuyama, Y., Yoshida, T., Tatsuoka, F., Koseki, J., Uchimura, T., Sato, N, Oie, M., (2003): Shear banding characteristics of granular materials and particle size effects on the seismic stability of the earth structures, Deformation characteristics of geomaterials, Edited by H. Di Benedeto et al., Balkema, Netherlands, 606-616
Piriyakul, K. and Haegeman, W., (2001): Void ratio function for elastic shear moduli for Boom clay. Géotechnique, Vol. 57, No. 2, pp. 245-248.
Piriyakul, K., Haegeman, W., (2007): Stiffness anisotropy of Boom clay. Proceedings of the 17th International Conference on Soil Mechanics and Geotechnical Engineering (ICSMGE 2009) Alexandria, Egypt.
Puzrin, A.M. & Burland, J.B. (1996): A logarithmic stress-strain function for rocks and soils. Géotechnique 46(1): 157-164.
Pyke, R.M., (1979): Nonlinear soil models for irregular cyclic loadings. ASCE Jorn. Geotechnical Engineering Division 105(6): 715-726.

7. Reference 191
Richart Jr., F.E. (1977): Part 1 of "Soil dynamics and its application to foundation engineering" by Y. Yoshimi, F.E. Richart Jr., S. Prakash, D.D. Barkan, & V.A. Ilychev; Proc. IX intern. conf. soil mechanics and foundation engineering, Tokyo, Vol. 2: 605-612.
Richart Jr., F.E. (1978): Field and laboratory measurements of dynamic soil properties. In B. Prange (ed.), Proceedings int. symp. dynamical methods in soil and rock mechanics, Karlsruhe. Rotterdam: Balkema, Vol. 1, 3-36.
Richart Jr., F.E. (1982): Discussion. In S. Prakash (ed.), Recent advances in geotechnical earthquake engineering and soil dynamics; Proc. intern. conf., St. Louis. St. Louis: University of Missouri-Rolla, Vol. III, 914-915.
Sfriso, A., Sagüés, P., Quaglia, G., Quintela, M. & Ledesma, O: (2008): Small-strain stiffness of the Pampeano Formation. Proceedings, Fourth International Simposium on Deformation Characteristics of Geomaterials
Shibuya, S.; Mitachi, T., (1994): Small Strain Shear Moduls of Clay Sedimentation in a State of Normal Consolidation. Soils and foundations 34(4):67-77
Shibuya, S.; Mitachi, T.; Fukada, F.; Degoshi, T.; (1995): Strain Rate Effects on Shear Moduls and Damping of Normaly Consolidated Clay. Geotechnical Testing Journal, GTJODJ: 18(3):365-375
Simpson, B.; (1992): Retaining structures: Displacement and design. Géotechnique 42: 541-576.
Sokolić, I.; (2010): Opis ponašanja pijeska poopćenim Iwanovim sustavom. Doktorski rad, Sveučilište u Zagrebu Građevinski fakultet
Stokoe, K. H. S. G.; Wright, J. A. Bay & J. M. Roësset (1994): Characterization of geotechnical sites by SASW method. In: R. D. Woods (ed.), Geophysical characterisation of sites. Volume prepared by XIII ISSMFE Technical Committee # 10 for XIII ICSMFE, 1994, New Delhi, India. Rotterdam: Balkema. 15-25.
Szavits-Nossan & A., Kovačević, M.S., (1995): Krutost tla pri malim deformacijama i njen značaj za temeljenje, Geotehnički problemi u urbanim sredinama, Varaždin, 04-06 listopada, 407-418.
Szavits-Nossan, A. & Kovačević, M.S. (1994), A kinematic hardening soil model for wide shear strain ranges. International Journal for Engineering Modelling 7(3-4): 55-63.
Szavits-Nossan, A., Mavar, R. & Kovačević, M.S. (1998): Small strain soil stiffness in foundation settlement predictions. Geotechnical Hazards, Proc. XIII Danube-European Conf. Soil Mechanics and Geotechnical Engineering, Poreč. Balkem, Rotterdam. 763-766.

7. Reference 192
Tatsuoka, F. & Shibuya, S. (1991): Deformation characteristics of soils and rocks from field and laboratory tests. Key note lecture for session no. 1. Proc. 9-th Asian regional conf. on soil mechanics and foundation engineering, Bangkok.
Tatsuoka, F. & Ishihara, K. (1974): Yielding of sand in triaxial compression. Soils and Foundations 14: 63-76.
Tatsuoka, F., Kohata, Y. (1995): Stiffness of hard soils and soft rocks in engineering applications. University of Tokyo, Report of the Institute of Industrial Science 38(5).
Taylor R.N. and Coop M.R., (1990). Stress path testing of Boom clay from Mol, Belgium. Proc. 26th Annual Conf. of the Eng. Group of the Geological Soc., Leeds., pp. 89-98.
Taylor, P.W. & Larkin, T.J. (1978). Seismic Site Response of Nonlinear Soil Media. ASCE Journ. Geotechnical Engineering Division, 104 (GT3) 369-383.
Troosno smicanje od vrlo malih deformacija do sloma Geotehnika kroz Eurokod 7 - Priopćenja 3. Savjetovanja Hrvatske udruge za mehaniku tla i geotehničko inženjerstvo / Mulabdić, Mensur, editor(s). Velika Gorica : Hrvatska udruga za mehaniku tla i geotehničko inženjerstvo, 2002. 307-312
Vermeer, P.A. (1978), A double hardening model for sands. Géotechnique 28(4): 413-433.
Vermeer, P.A. (1984), A five-constant model unifying well established concepts. In Gudehus et al. (eds.), Constitutive relations for soils. Rotterdam: Balkema, 175-197.
Viggiani, G. (1992): Small strain stiffness of fine grained soils, PhD Thesis, The City University.
Viggiani, G. and Atkinson, J.H. (1995):. Stiffness of finegrained soils at very small strains. Geotechnique 45, No. 2, pp. 249-255.
Vilhar, G. (2009). Odnos med napetostmi in deformacijami za meljne peske v obmocjih od zelo majhnih do velikih deformacij. Ljubljana: Univerza v Ljubljani, Fakulteta za gradbeništvo in geodezijo
Vilhar, G., Jovičić, V., (2009): Measurement and interpretation of the small strain strffnes of Boštanj silty sand. ACTA GEOTECHNICA SLOVENICA, p.p. 57-75/
Vucetic, M. & Dobry, R. (1991). Effect of soil plasticity on cyclic response. Journal of Geotechnical Engineering, ASCE, 117(1):89-107.
Wang, Y., and C.W.W. Ng. (2005): Effects of stress paths on the small-strain stiffness of completely decomposed granite. Can. Geotech. J. 42: 1200–1211 (2005)

7. Reference 193
Wicaksono, R.I., De Silva, L.I.N., Mulmi, S., Enomoto, T., Kiyota, T., Tsutsumi, Y., Kuwano, R., and Koseki, J., (2008): Small Strain Stiffness of Toyoura Sand Obtained from Various Techniques in IIS, SEISAN KENKYU, Vol. 60 No. 6 pp.561-564
Wicaksono, R.I., Tsutsumi, Y., Sato, T., and Koseki, J., Kuwano, R. (2008): Laboratory Wave Measurement on Toyoura Sand and Hime Gravel. Bulletin of Earthquake Resistant Structure Research Center, University of Tokyo, 41, pp. 35-44.
Woods, R.D. (1978), Measurement of dynamic soil properties. Proceedings, Earthquake Engineering and Soil Dynamics, ASCE, 1, 91-178.
Woods, R.D. (1994), Laboratory measurement of Dynamic Soil Properties. Geotecnical Testing II, ASTM STP 1213, Philadelphia, pp. 165-190.
Zlatović, S. i Szavits-Nossan, A., (1999): Local measurement of radial strain in triaxial apparatus: A new device, Proceedings International Conference Torino ’99: Pre-failure Deformation of Geomaterials, Balkema, Rotterdam, Vol. 1, 245-248

ŽIVOTOPIS
Željko Lebo rođen je 28.10.1966. godine u Mostaru u Bosni i Hercegovini. Osnovnu i
srednju građevinsku školu pohađao je u Posušju do 1985. godine kada se upisuje na
Građevinski fakultet Sveučilišta u Zagrebu. Nakon upisa odlazi na odsluženje vojnog
roka, te po povratku nastavlja studij koji završava 1993. god. kao diplomirani inženjer
građevinarstva. Po završetku studija odlazi na kraći rad u inozemstvo gdje radi na
stručnim poslovima u građevinskoj operativi. Po povratku u Hrvatsku zapošljava se
građevinskim tvrtkama na stručnim poslovima projektiranja. U ljeto 1997. godine
zapošljava se kao stučni suradnik na Zavodu za geotehniku pri Građevinskom fakultetu
Sveučilišta u Zagrebu. Od 01.08.1997. do 31.10.2003. godine sudjeluje u stručnim i
znanstvenim projektima Zavoda, te na randnom mjestu mlađeg asistenta gdje sudjeluje
u izvođenju nastave (vježbi) iz predmeta Mehanika tla i Mehanika stijena. U istom
periodu radi na znanstveno i stručnim istraživanjima tla i stijena u geotehničkom
laboratoriju, te obavlja niz stručnih poslova projektiranja, konzaltinga i stručnog
nadzora građenja.
U periodu šk.god. 1998/1999 i 1999/2000. na Građevinskom fakultetu u Osjeku
izvodio je nastavu kao mlađi asistent iz predmeta Mehanika tla i temeljenje.
Dana 01.11.2003. godine, temeljem ugovora između Građevinskog fakulteta
Sveučilišta u Zagrebu i Tehničkog veleučilišta u Zagrebu, kao stručni suradnik prelazi u
radni odnos na Graditeljski odjel Tehničkog veleučilišta u Zagrebu. Od tada do danas
radi u nastavi kao predavač iz predmeta Mehanika tla, Geotehnika, Tehnička mehanika,
Proračun konstrukcija, te na specijalističkom studiju Geotehnologija i Tuneli
Na domaćim i međunarodnim časopisima ukupno je objavio 15 znanstveno stručnih
radova, te sudjelovao u više od 145 stručnih projekata, od toga kao projektant na 65
projekta, kao nadzorni inženjer na 35 projekata i kao stručni suradnik na 45 projekata.
Član je udruge diplomiranih inženjera Građevinskog fakulteta Sveučilišta u Zagrebu
(AMCA-FA), Hrvatskog i Međunarodnog društva za mehaniku tla i geotehničko
inženjerstvo (HGD, ISSMGE), Tehničkog odbora za Geosintetike i srodne proizvode
TO 221 pri HZN, te Hrvatske komore inženjera u građevinarstvu (HKIG).
Sudionik je Domovinskog rata, te oženjen i otac troje djece.














