CHAPTER 11 Vector-Valued Functions 1. Vector-Valued Functions Example. Consider the function r(t)=(t + 1)i +(t 2 - 2)j = ht +1,t 2 - 2i. Each value of t yields a particular vector — think of t as time. What does the curve generated by this function look like? We have the following parametric equations: x = t +1 and y = t 2 - 2= ) t = x - 1 and t 2 = y +2= ) t 2 = x 2 - 2x +1 and t 2 = y +2= ) y = x 2 - 2x - 1, a parabola. We have r(-2) = h-1, 2i, r(0) = h1, -2i and r(2) = h3, 2i. The arrows on the graph indicate the orientation , the direction with increasing values of t. 35
Transcript
CHAPTER 11
Vector-Valued Functions
1. Vector-Valued Functions
Example. Consider the function
r(t) = (t + 1)i + (t2 � 2)j = ht + 1, t2 � 2i.Each value of t yields a particular vector — think of t as time. What does thecurve generated by this function look like?
We have the following parametric equations:
x = t + 1 and y = t2 � 2 =)t = x� 1 and t2 = y + 2 =)
t2 = x2 � 2x + 1 and t2 = y + 2 =)y = x2 � 2x� 1, a parabola.
We have r(�2) = h�1, 2i, r(0) = h1,�2i and r(2) = h3, 2i.The arrows on the graph indicate the orientation, the direction with increasingvalues of t.
35
36 11. VECTOR-VALUED FUNCTIONS
Definition. A vector-valued function r(t) is a mapping from D 2 R toR ✓ V3, so that for each t 2 D, r(t) = v for exactly one vector v 2 V3. Wewrite
r(t) = f(t)i + g(t)j + h(t)k = hf(t), g(t), h(t)ifor some scalar functions f , g, and h, the component functions or r.
In 3 dimensions, we get a space curve, and in 2 dimensions, a plane curve.
Problem (Page 863 #48). Find the intersection of z =p
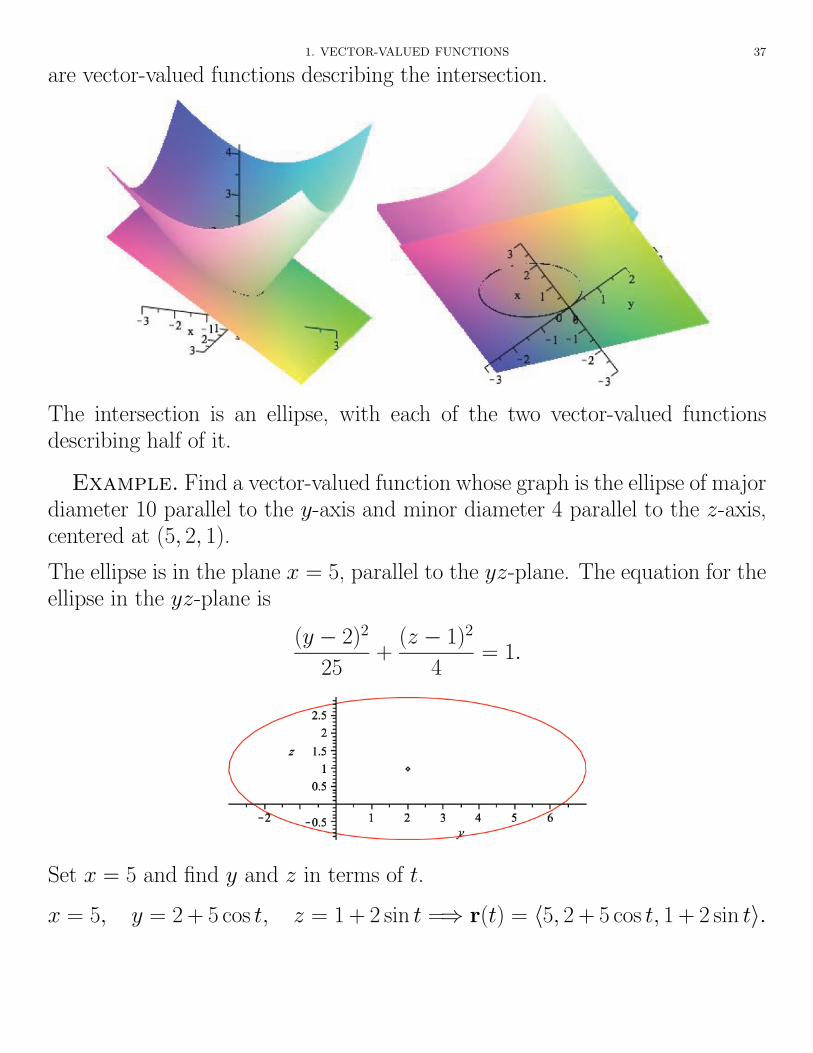
are vector-valued functions describing the intersection.
The intersection is an ellipse, with each of the two vector-valued functionsdescribing half of it.
Example. Find a vector-valued function whose graph is the ellipse of majordiameter 10 parallel to the y-axis and minor diameter 4 parallel to the z-axis,centered at (5, 2, 1).
The ellipse is in the plane x = 5, parallel to the yz-plane. The equation for theellipse in the yz-plane is
(y � 2)2
25+
(z � 1)2
4= 1.
Set x = 5 and find y and z in terms of t.
x = 5, y = 2 + 5 cos t, z = 1 + 2 sin t =) r(t) = h5, 2 + 5 cos t, 1 + 2 sin ti.
38 11. VECTOR-VALUED FUNCTIONS
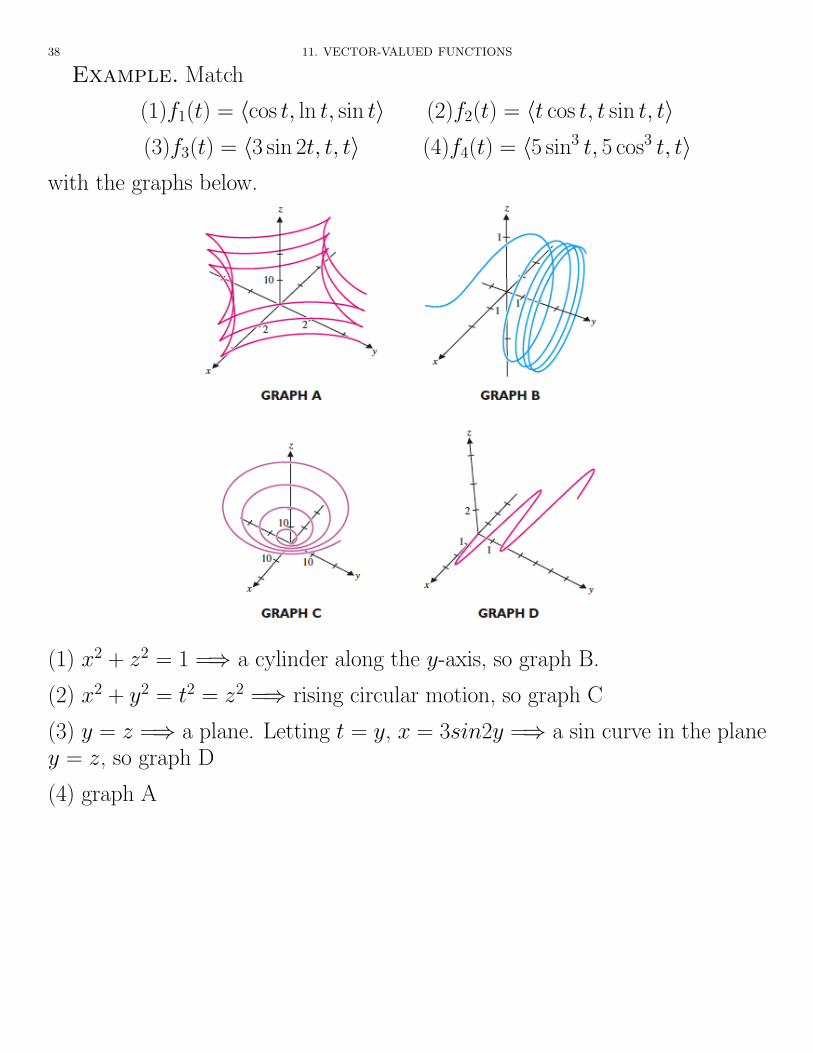
Example. Match
(1)f1(t) = hcos t, ln t, sin ti (2)f2(t) = ht cos t, t sin t, ti(3)f3(t) = h3 sin 2t, t, ti (4)f4(t) = h5 sin3 t, 5 cos3 t, ti
with the graphs below.
(1) x2 + z2 = 1 =) a cylinder along the y-axis, so graph B.
(2) x2 + y2 = t2 = z2 =) rising circular motion, so graph C
(3) y = z =) a plane. Letting t = y, x = 3sin2y =) a sin curve in the planey = z, so graph D
(4) graph A
1. VECTOR-VALUED FUNCTIONS 39
Arc Length in R3.
Suppose a curver(t) = hf(t), g(t), h(t)i
is traced once from t = a to t = b.
Partition [a, b] into n subintervals of equal size
a = t0 < t1 < · · · tn = b where ti � ti�1 = �t =b� a
Example. Find the length of r(t) = h4 cos t, 4 sin t, 3ti, 0 t ⇡
2.
s =
Z ⇡2
0
p[�4 sin t]2 + [4 cos t]2 + [3]2 dt =
Z ⇡2
0
p16 + 9 dt =
Z ⇡2
05 dt = 5t
����⇡2
0
=5⇡
2.
Note. Most integrals for arclength need to be evaluated by numerical meth-ods.
Maple. See vectorvalued(11.1).mw or vectorvalued(11.1).pdf
2. The Calculus of Vector-Valued Functions
Note. We will work in 3 dimensions. Just drop o↵ a component for twodimensions. Overall, we just import what we know from Calculus I into thecomponents.
Definition. For r(t) = hf(t), g(t), h(t)i, the limit of r(t) as t! a is
limt!a
r(t) = limt!ahf(t), g(t), h(t)i =
⌦limt!a
f(t), limt!a
g(t), limt!a
h(t)↵
provided all the indicated limits exist. If any of the limits on the RHS fail toexist, then lim
t!ar(t) does not exist.
2. THE CALCULUS OF VECTOR-VALUED FUNCTIONS 41
Example.
limt!⇡
4
hsin t cos t, cos2 t, sin ti =
Dlimt!⇡
4
sin t cos t, limt!⇡
4
cos2 t, limt!⇡
4
sin tE
=
Dsin
⇡
4cos
⇡
4, cos2
⇡
4, sin
⇡
4
E=
D1
2,1
2,
p2
2
EDefinition. The function f : R! R is continuous at a if
limt!a
f(t) = f(a)
The function above is not continuous at t = 2 since limt!2
f(t) does not exist since
1 = limt!2�
f(t) 6= limt!2+
f(t) = 4.
At every other point, limt!a
f(t) does exist. But f is not continuous at t = 1 since
limt!1
f(t) = 2 6= 3 = f(1)
and f is not continuous at t = 3 since f(3) is not defined. These last twocases are called removable discontinuities since they can be removed by eitherdefining a value at a point (f(3) = 1) or redefining a value (f(1) = 2).
At every other point, f is continuous. For example, at t = 5,
limt!5
f(t) = 1 = f(5).
42 11. VECTOR-VALUED FUNCTIONS
Definition. r(t) = hf(t), g(t), h(t)i is continuous at t = a whenever
limt!a
r(t) = r(a).
Theorem (2.1). r(t) = hf(t), g(t), h(t)i is continuous at t = a if andonly if all of f , g, h are continuous at t = a.
Example. For which values of t is
r(t) = hsin t,� csc t, tan ticontinuous?
f(t) = sin t is continuous everywhere.
g(t) = csc t =1
sin tis discontinuous for sin t = 0, i.e., t = n⇡, n = 0,±1,±2, . . . .
h(t) = tan t =sin t
cos tis discontinuous for cos t = 0, i.e., t =
⇡
2+ n⇡, n =
0,±1,±2, . . . .
Thus r(t) is continuous everywhere except atn⇡
2, n = 0,±1,±2, . . . .
Definition. The derivative r0(t) of r(t) is defined by
r0(t) = lim�t!0
r(t + �t)� r(t)
�tfor all values of t for which the limit exists. When the limit exists for t = a, wesay r is di↵erentiable at t = a.
2. THE CALCULUS OF VECTOR-VALUED FUNCTIONS 43
Theorem (2.2). Let r(t) = hf(t), g(t), h(t)i and suppose the componentsare all di↵erentiable for some value of t. Then r is also dei↵erentiable atthat value of t and
Theorem (2.3). Suppose r(t) and s(t) are di↵erentiable, f(t) is di↵er-entiable, and c 2 R. Then
(1)d
dt
⇥r(t) + s(t)
⇤= r0(t) + s0(t)
(2)d
dt
⇥cr(t)
⇤= cr0(t)
(3)d
dt
⇥f(t)r(t)
⇤= f 0(t)r(t) + f(t)r0(t)
(4)d
dt
⇥r(t) · s(t)
⇤= r0(t) · s(t) + r(t) · s0(t)
(5)d
dt
⇥r(t)⇥ s(t)
⇤= r0(t)⇥ s(t) + r(t)⇥ s0(t)
Proof. Let r(t) =⌦a(t), b(t), c(t)
↵.
d
dt
⇥f(t)r(t)
⇤=
d
dt
⇥f(t)
⌦a(t), b(t), c(t)
↵⇤
=d
dt
⇥⌦f(t)a(t), f(t)b(t), f(t)c(t)
↵⇤=
⌦f 0(t)a(t) + f(t)a0(t), f 0(t)b(t) + f(t)b0(t), f 0(t)c(t) + f(t)c0(t)
↵=
⌦f 0(t)a(t), f 0(t)b(t), f 0(t)c(t)
↵+
⌦f(t)a0(t), f(t)b0(t), f(t)c0(t)
↵= f 0(t)
⌦a(t), b(t), c(t)
↵+ f(t)
⌦a0(t), b0(t), c0(t)
↵= f 0(t)r(t) + f(t)r0(t)
Definition. r(t) = hf(t), g(t), h(t)i is smooth on an interval I if r0(t) iscontinuous on I and r0(t) 6= 0, except possibly at endpoints of I.
Corollary. r(t) is smooth on I if f 0, g0, and h0 are all continuous onI and are not all 0 at the same time.
2. THE CALCULUS OF VECTOR-VALUED FUNCTIONS 45
Example. Where is r(t) =Dt3 � t2,
t2
2� 2
3t, cos
⇣t� 2
3
⌘Esmooth?
r0(t) =D
3t2 � 2t, t� 2
3,� sin
⇣t� 2
3
⌘E
=Dt(3t� 2), t� 2
3,� sin
⇣t� 2
3
⌘E
is smooth except at t =2
3.
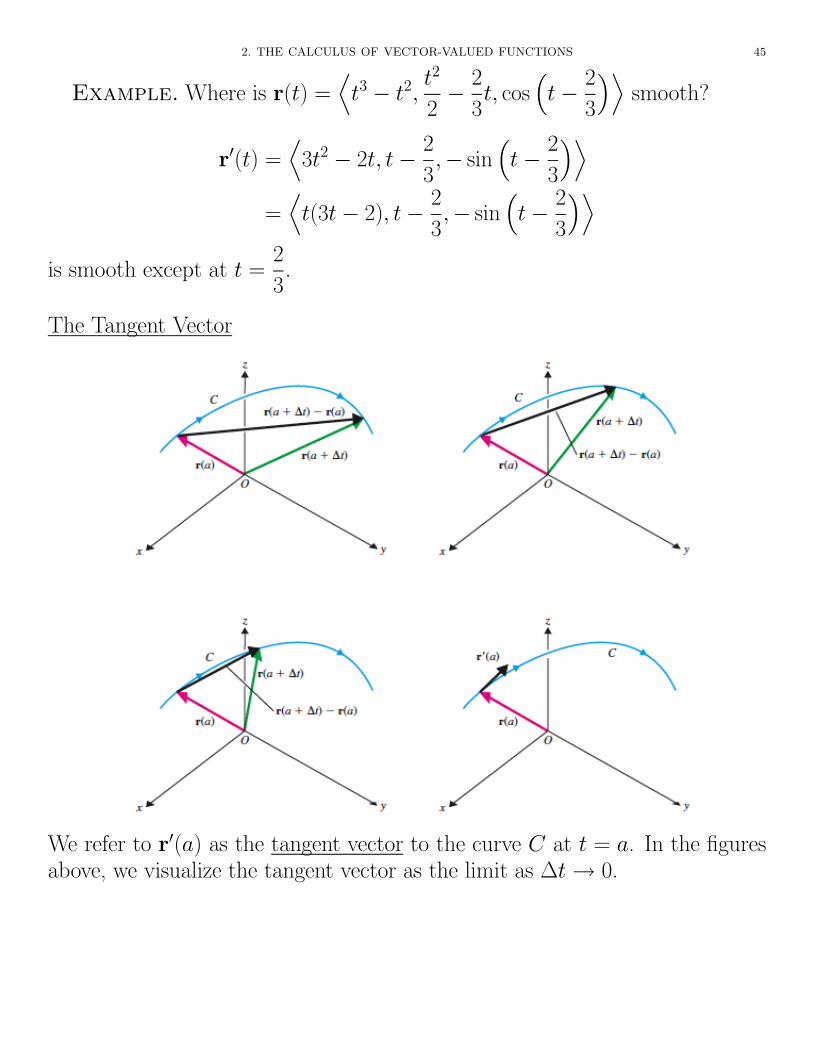
The Tangent Vector
We refer to r0(a) as the tangent vector to the curve C at t = a. In the figuresabove, we visualize the tangent vector as the limit as �t! 0.
46 11. VECTOR-VALUED FUNCTIONS
Example (Uniform Circular Motion).
Let r(t) = hR cos !t, R sin !ti, R > 0, ! > 0.
The motion is in the circle of radius R with period2⇡
!.
r0(t) = h�R! sin !t, R! cos !ti is the tangent vector.
r0(t) · r(t) = �R2! sin !t cos !t + R2! sin !t cos !t = 0 =) r0(t) ? r(t) =)r0(t) is tangent to the circle.
speed = kr0(t)k =p
R2!2 sin2 !t + R2!2 cos2 !t
= R!p
sin2 !t + cos2 !t
= R!, a constant.
Note. r0(t) points in the direction of the motion.
Theorem (2.4). kr(t)k = constant if and only if r(t) and r0(t) are or-thogonal for all t.
Definition. R(t) is an antiderivative of r(t) whenever R0(t) = r(t).
2. THE CALCULUS OF VECTOR-VALUED FUNCTIONS 47
Definition. If R(t) is any antiderivative of r(t), the indefinite integral ofr(t) is Z
r(t) dt = R(t) + c
where c is an arbitrary constant vector. This meansZr(t) dt =
Z ⌦f(t), g(t), h(t)
↵dt =
DZf(t) dt,
Zg(t) dt,
Zh(t) dt
E.
Example. Z ⌦e�3t, t2 cos t3, t cos t
↵dt =
DZe�3t dt,
Zt2 cos t3 dt,
Zt cos t dt
E=
t cos t+&
1 sin t�&
0+ � cos tD
� 1
3e�3t + c1,
1
3sin t3 + c2, t sin t + cos t + c3
E=D
� 1
3e�3t,
1
3sin t3, t sin t + cos t
E+ hc1, c2, c3i| {z }
c
.
Definition. For r(t) = hf(t), g(t), h(t)i, the definite integral of r(t) onthe interval [a, b] isZ b
ar(t) dt =
Z b
a
⌦f(t), g(t), h(t)
↵dt =
DZ b
af(t) dt,
Z b
ag(t) dt,
Z b
ah(t) dt
E.
48 11. VECTOR-VALUED FUNCTIONS
Theorem (2.5 — Fundamental Theorem of Calculus). Suppose R(t) is anantiderivative of r(t) on [a, b]. ThenZ b
ar(t) dt = R(b)�R(a).
Example. Z ⇡/3
0
⌦sec t tan t, tan t, 2 sin t cos t
↵dt =
DZ ⇡/3
0sec t tan t dt,
Z ⇡/3
0tan t dt,
Z ⇡/3
02 sin t cos t dt
E=
Dsec t
���⇡/3
0,� ln|cos t|
���⇡/3
0, sin2 t
���⇡/3
0
E=D
sec⇡
3� sec 0,� ln|cos
⇡
3| + ln|cos 0|, sin2 ⇡
3� sin2 0
E=D
2� 1,� ln1
2+ 0,
3
4� 0
E=D
1, ln 2,3
4
E
Maple. See vectorcalculus(11.2).mw or vectorcalculus(11.2).pdf
3. MOTION IN SPACE 49
3. Motion in Space
Consider the curve traced out by r(t) = hf(t), g(t), h(t)i, t 2 [a, b].
r0(t) = hf 0(t), g0(t), h0(t)i.kr0(t)k =
p[f 0(t)]2 + [g0(t)]2 + [h0(t)]2.
For t0 2 [a, b], the arclength from u = t0 to u = t is
s(t) =
Z t
t0
p[f 0(u)]2 + [g0(u)]2 + [h0(u)]2 du.
By the FTC,
s0(t) =p
[f 0(t)]2 + [g0(t)]2 + [h0(t)]2 = kr0(t)k.s0(t) is the instantaneous change of arclength with respect to time = speed.
Thus r0(t) = velocity vector = v(t) and
r00(t) = v0(t) = accelleration vector = a(t).
50 11. VECTOR-VALUED FUNCTIONS
Problem (Page 785 # 14). Find the position function r(t) given thata(t) =
⌦e�3t, t, sin t
↵, v(0) = h4,�2, 4i, and r(0) = h0, 4,�2i.
v(t) =
Z ⌦e�3t, t, sin t
↵dt =
D� 1
3e�3t,
t2
2,� cos t
E+ c1
v(0) =D� 1
3, 0,�1
E+ c1 = h4,�2, 4i =) c1 =
D13
3,�2, 5
E
Thus v(t) =D� 1
3e�3t +
13
3,t2
2� 2,� cos t + 5
E.
r(t) =
Z D� 1
3e�3t +
13
3,t2
2� 2,� cos t + 5
Edt =
D1
9e�3t +
13
3t,
t3
6� 2t,� sin t + 5t
E+ c2
r(0) =D1
9, 0, 0
E+ c2 = h0, 4,�2i =) c2 =
D� 1
9, 4,�2
E
Thus r(t) =D1
9e�3t +
13
3t� 1
9,t3
6� 2t + 4,� sin t + 5t� 2
E.
3. MOTION IN SPACE 51
Centripetal Force
Newton’s Second law is F = ma where F is the net force on an object.
We return to uniform circular motion.
d✓
dt= ! (a constant) =) ✓ = !t + c.
r(t) = hb cos ✓, b sin ✓i =⌦b cos(!t + c), b sin(!t + c)
↵.
Since the path is the same for all c, take ✓ = 0 for t = 0, i.e., take c = 0. Thus
r(t) =⌦b cos !t, b sin !t
↵=)
v(t) = r0(t) =⌦� b! sin !t, b! cos !t
↵=) kv(t)k = !b.
Now
a(t) = v0(t) = r00(t) =⌦� b!2 cos !t,�b!2 sin !t
↵=
� !2⌦b cos !t, b sin !t
↵= �!2r(t).
52 11. VECTOR-VALUED FUNCTIONS
ThenF(t) = ma(t) = �m!2r(t),
a centripetal force (a force pointing to the center).
kF(t)k = k�m!2r(t)k = m!2kr(t)k = m!2b,
a constant.
Note. Force increases as the rotation rate ! increases.
3. MOTION IN SPACE 53
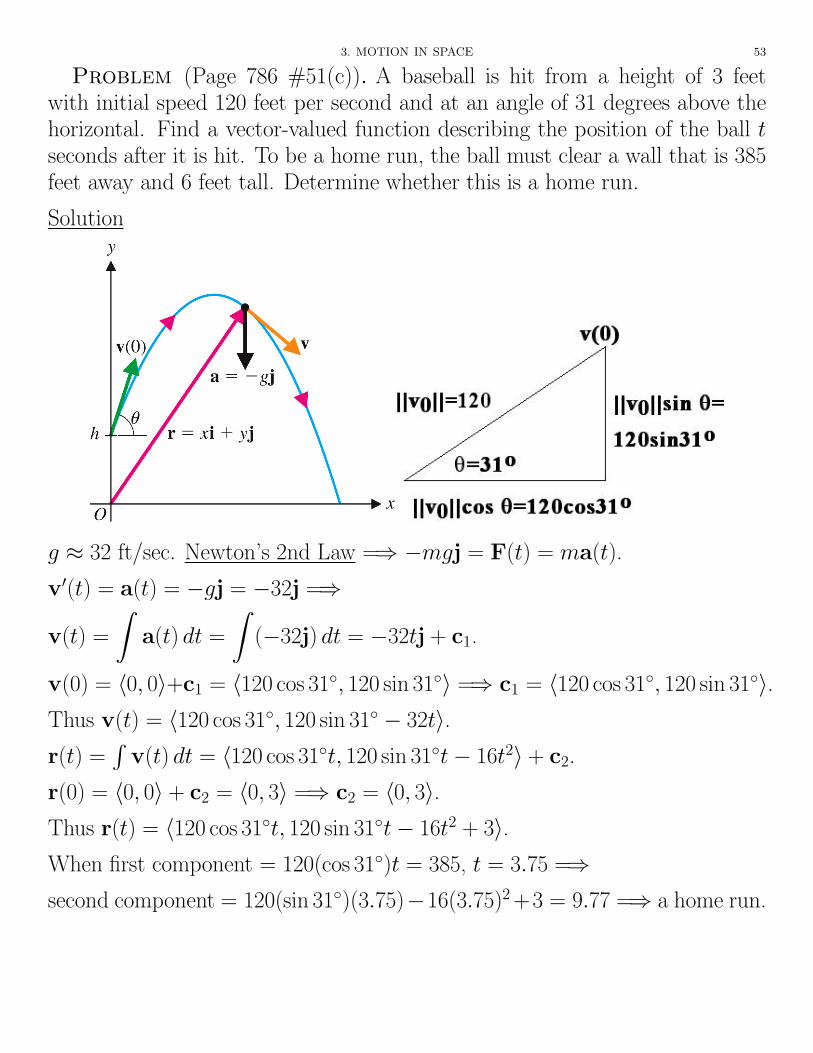
Problem (Page 786 #51(c)). A baseball is hit from a height of 3 feetwith initial speed 120 feet per second and at an angle of 31 degrees above thehorizontal. Find a vector-valued function describing the position of the ball tseconds after it is hit. To be a home run, the ball must clear a wall that is 385feet away and 6 feet tall. Determine whether this is a home run.
Solution
g ⇡ 32 ft/sec. Newton’s 2nd Law =) �mgj = F(t) = ma(t).
v0(t) = a(t) = �gj = �32j =)
v(t) =
Za(t) dt =
Z(�32j) dt = �32tj + c1.
v(0) = h0, 0i+c1 = h120 cos 31�, 120 sin 31�i =) c1 = h120 cos 31�, 120 sin 31�i.Thus v(t) = h120 cos 31�, 120 sin 31� � 32ti.r(t) =
Rv(t) dt = h120 cos 31�t, 120 sin 31�t� 16t2i + c2.
r(0) = h0, 0i + c2 = h0, 3i =) c2 = h0, 3i.Thus r(t) = h120 cos 31�t, 120 sin 31�t� 16t2 + 3i.When first component = 120(cos 31�)t = 385, t = 3.75 =)second component = 120(sin 31�)(3.75)�16(3.75)2 +3 = 9.77 =) a home run.
54 11. VECTOR-VALUED FUNCTIONS
Problem (Page 785 #34). A merry-go-round of radius 5 feet and momentof inertia I = 10 rotates at 4 rad/s. Find the constant force needed to stop themerry-go-round in 2 seconds.
Solution
Rotational version of Newton’s Second Law:
For an object rotating in two dimensions, with ⌧ = torque,
T = k⌧k = (force in direction of motion F)(distance from axis of rotation r).
If ✓(t) is measured from some fixed ray,
!(t) = ✓0(t) = angular velocity,
↵(t) = !0(t) = ✓00(t) = angular accelleration.
I = moment of inertia = how much force must be applied to start object ro-tating.
Equation of Rotational Motion:
T = I↵
Here, since F = constant and distance = 5 = r, T is constant =)↵ is constant since I = 10. We find ↵:
We have !(0) = 4 and want !(2) = 0, so
!(2)� !(0) =
Z 2
0↵ dt = ↵t
���20
= 2↵ = 0� 4 =) ↵ = �2 rad/sec.
Since I↵ = Fr,
(10)(�2) = F (5) =) F = �4 ft-pounds.
3. MOTION IN SPACE 55
Rotational Force in 3 Dimensions
Recall ⌧ = r⇥ F.
linear momentum = p = mv.
angular momentum = L(t) = r(t)⇥mv(t).
L0(t) =d
dt
hr(t)⇥mv(t)
i= r0(t)⇥mv(t) + r(t)⇥mv0(t)
= v(t)⇥mv(t)| {z }=0 since vectors are k
+r(t)⇥ma(t)
= r⇥ F = ⌧.
This implies the conservation of angular momentum:
In the absence of torque (⌧ = 0), angular momentum remains constant.