REGULAR ARTICLE Viability Analysis of Multi-fishery C. Sanogo • S. Ben Miled • N. Raissi Received: 16 February 2012 / Accepted: 20 February 2012 / Published online: 4 March 2012 Ó Springer Science+Business Media B.V. 2012 Abstract This work is about the viability domain corresponding to a model of fisheries management. The dynamic is subject of two constraints. The biological constraint ensures the stock perennity where as the economic one ensures a mini- mum income for the fleets. Using the mathematical concept of viability kernel, we find out a viability domain which simultaneously enables the fleets to exploit the resource, to ensure a minimum income and stock perennity. Keywords Fishing management Viability kernel Sustainable exploitation strategy 1 Introduction According to recent studies (Assessment 2005) exploited renewable resources are under extreme worldwide pressure. In particular for halieutic resources, three C. Sanogo LIRNE, Mathmatics Engineering Team, Ibn Tofail University, Kenitra, Morocco e-mail: [email protected]S. Ben Miled ENIT-LAMSIN, Tunis el Manar University, Tunis, Tunisia S. Ben Miled (&) Pasteur Institute of Tunis, 13, place Pasteur, Belve ´de `re, B.P. 74, 1002 Tunis, Tunisia e-mail: [email protected]N. Raissi LAA, Mohamed V University, Rabat, Morocco e-mail: [email protected]123 Acta Biotheor (2012) 60:189–207 DOI 10.1007/s10441-012-9153-5
Transcript
REGULAR A RTI CLE
Viability Analysis of Multi-fishery
C. Sanogo • S. Ben Miled • N. Raissi
Received: 16 February 2012 / Accepted: 20 February 2012 / Published online: 4 March 2012
� Springer Science+Business Media B.V. 2012
Abstract This work is about the viability domain corresponding to a model of
fisheries management. The dynamic is subject of two constraints. The biological
constraint ensures the stock perennity where as the economic one ensures a mini-
mum income for the fleets. Using the mathematical concept of viability kernel, we
find out a viability domain which simultaneously enables the fleets to exploit the
resource, to ensure a minimum income and stock perennity.
where X(t) is the exploited stock biomass at time t C 0 and X0 correspond to the
initial biomass, Ei(t) is the fishing effort for fleet i at time t, ui(t) is the variation rate
of the fishing effort Ei(t) at time t. The variation rate of the fishing effort can be
interpreted as an investment rate of fleet i in activity, qi is the catchability coefficient
of fleet i for i [ {1,2}. We suppose, that the natural growth rate of the resource is
represented by a logistic law:
FðXÞ ¼ rX 1� X
K
� �
where K is carrying capacity of the environment.
For the fleet i, i [ {1, 2}, the discount rate di, the fish unit price pi and the unit
cost of fishing effort ci are supposed to be constant and non-negative. The net
benefit generated by the exploitation has the following expression (Jerry and Raissi,
2001), for i [ {1,2}
PðuiÞ ¼Zþ1
0
exp�di t ðpiqiXðtÞ � ciÞEiðtÞ � uið Þdt; ð2Þ
u�i � uiðtÞ� uþi ; u�i \0; uþi [ 0
The maximization problem of profit must be inevitably hierarchically organized
to define the order of the priorities of every fleet.
In their work, Clark (1990) and Raissi (2001) showed that the less efficient fleet
ended up by leaving the fishing activity.
The maximization of the net benefit generated by the exploitation (2) leads
systematically to the exclusion of the less efficient fleet.
To maintain the two fleets in activity, it is necessary to replace the maximization
objective by a set of constraints ensuring a minimal income for each fleet and
maintaining the stock sustainable. In the next paragraph we will analyze the
compatibility of the dynamical system (1) with these new constraints.
3 Viability Analysis
In this section we identify the viability constraints and determine the viability kernel
associated to each fleet. In other words, we determine for every fleet, the set of
initial conditions (stock, efforts) in which viable and sustainable strategies of
exploitation are elaborated.
3.1 Viability Constraints
We study the viability property of (1) in relation to three constraints:
Viability Analysis of Multi-fishery 191
123
1. The first constraint is an ecological one ensuring a minimum stock level,
r1 : Xmin�X�K:
2. The second one is an economic matter ensuring a minimum income Li for
fishermen at each time,
r2 : ðpiqiX � ciÞEi � uþi � Li� 0; with i 2 f1; 2g
this constraint is verified for all ui(t) B ui?.
3. For the third it stems from the technical constraint, the fishing efforts are non-
negatives and constrained by a limited capacity,
r3 : 0�Ei�Emaxi with i 2 f1; 2g:
After that, we should define a set of constraints imposed to fleets and we shall
determine the viability kernel associated to each fleet compared to the following set:
Ki ¼ðX;E1;E2Þ=ðpiqiX � ciÞEi � uþi � Li;
Xmin\X�K; 0�E1�Emax1 ; 0�E2�Emax
2
� �
Where for all i 2 f1; 2g;Ki represents the set of constraints associated to fleet i.First, we will work in dimension two, as if only one fleet is in activity. Then we will
use these results in the dynamical analysis in dimension three by including the second
fleet. Let’s define the projection of Ki; in the phase plane (X, Ei), (i [ {1, 2}),
projðKiÞ ¼ðX;EiÞ=ðpiqiX � ciÞEi � uþi � Li;
Xmin\X�K; 0�Ei�Emaxi
� �
:
Some elementary geometric considerations bring insight to understand the role of
the parameters in the consistency between constraints and controlled dynamics.
Indeed, let us note by Di the curve defined by:
Di ¼ X;ðuþi þ LiÞðpiqiX � ciÞ
� �
=Xmin\X�K
� �
:
This curve describes levels of stock-effort for which the fleet i has a minimal
income Li, with i [ {1,2}. Below, Di the minimal income Li is not guaranteed for
the fleet i.The identification of the viable equilibrium points is an essential stage in the
determination of viability kernel. These viable equilibrium points verify constraints
imposed by the dynamical system. In the following, we denote the set of equilibrium
points in the phase plane (X, Ei), i [ {1, 2} by,
I i ¼ X;r
qi1� X
K
� �� �
=Xmin\X�K
� �
;
If
pi þci
qiK
� �2
[ 4pi
rK
cir
qiþ uþi þ Li
� �
; i 2 f1; 2g; ð3Þ
192 C. Sanogo et al.
123
then the following polynomial admits two positive roots Xi,min* and Xi,max
* ,
� pir
KX�2 þ r pi þ
ci
qiK
� �
X� � cir
qiþ uþi þ Li
� �
ð4Þ
We denote by Ei,min* (resp. Ei,max
* )the corresponding fishing effort of Xi,min* (resp.
Xi,max* ).
If, for all i [ {1, 2},
pi þci
qiK
� �2
�4pi
rK
cir
qiþ uþi þ Li
� �
¼ 0;
then the polynomial (4) admits a positive root X*; we denote also Ei* the fishing
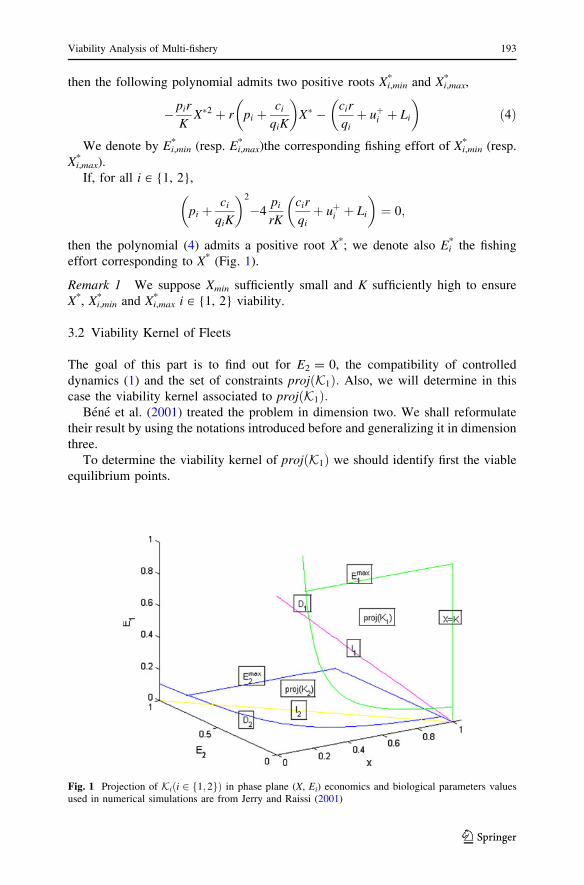
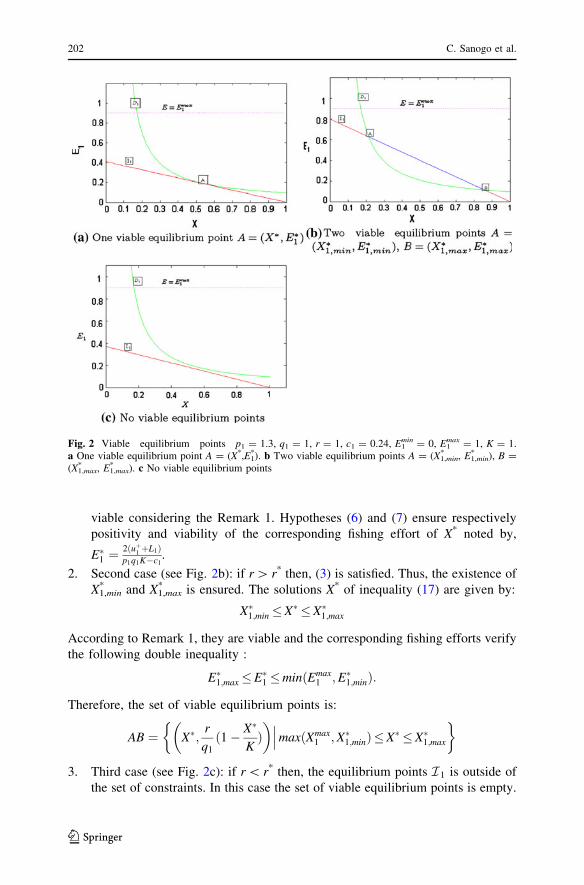
effort corresponding to X* (Fig. 1).
Remark 1 We suppose Xmin sufficiently small and K sufficiently high to ensure
X*, Xi,min* and Xi,max
* i [ {1, 2} viability.
3.2 Viability Kernel of Fleets
The goal of this part is to find out for E2 = 0, the compatibility of controlled
dynamics (1) and the set of constraints projðK1Þ: Also, we will determine in this
case the viability kernel associated to projðK1Þ:Bene et al. (2001) treated the problem in dimension two. We shall reformulate
their result by using the notations introduced before and generalizing it in dimension
three.
To determine the viability kernel of projðK1Þ we should identify first the viable
equilibrium points.
Fig. 1 Projection of Kiði 2 f1; 2gÞ in phase plane (X, Ei) economics and biological parameters valuesused in numerical simulations are from Jerry and Raissi (2001)
Viability Analysis of Multi-fishery 193
123
3.2.1 Viable Equilibrium Points in the Phase Plane (X, E1)
The projection of (1) in phase plane (X, E1) is given by:
_X ¼ FðXÞ � q1E1X_E1 ¼ u1ðtÞ
Xð0Þ ¼ X0; E1ð0Þ ¼ E01:
8<
:ð5Þ
Existence of viable equilibrium points corresponding to (5) are obtained by the
following proposition. Proof of this proposition is left in the ‘‘Appendix 1’’
Proposition 1 Under following conditions:
K [ maxc1
p1q1
;c2
p2q2
� �
ð6Þ
Emaxi � 2ðuþi þ LiÞ
piqiK � ci; i 2 f1; 2g ð7Þ
r� r� ¼ 4p1q21Kðuþ1 þ L1Þ
ðc1 � p1q1KÞ2ð8Þ
Emax1 �E�1;max ð9Þ
and if (3) is fulfilled, then the set of viable equilibrium points correspondingto (5) is given by the segment AB, where
AB ¼ X�;r
q1
1� X�
K
� �� �
maxðXmax1 ;X�1;minÞ�X� �X�1;max
���
� �
and Xmax1 ¼ K 1� q1Emax
1
r
� �is the biomass level when E1 = E1
max.
Remark 2 The condition (6) is equivalent to K piqi [ ci, with i [ {1,2} this is a
condition of fishing activity viability, it indicates that the fleet participates in fishing
activity only if the minimum income is ensured.
The condition (7) indicates that at equilibrium the fishing effort must not exceed
the limit capacity imposed. Otherwise, the fleet is forced to leave fishery.
The conditions (8) and (9) play important roles in the determination of viability
kernel. The first one gives us a minimal intrinsic growth rate r* below which the activity
of fishing is not viable the second reveals to us a minimum threshold of effort E1,max* .
3.2.2 Calculation of Kernel Viability of projðK1Þ
In this paragraph we have to characterize the viability kernel of projðK1Þ noted by
ViabðprojðK1ÞÞ and defined by,
ViabðprojðK1ÞÞ ¼ ðX;E1Þ9u1ð:Þwith u�1 � u1ðtÞ� uþ1 such that the solution
ðXð:Þ;E1ð:ÞÞ of ð5Þ starting at ðX;E1Þ stays in projðK1Þ
����
� �
194 C. Sanogo et al.
123
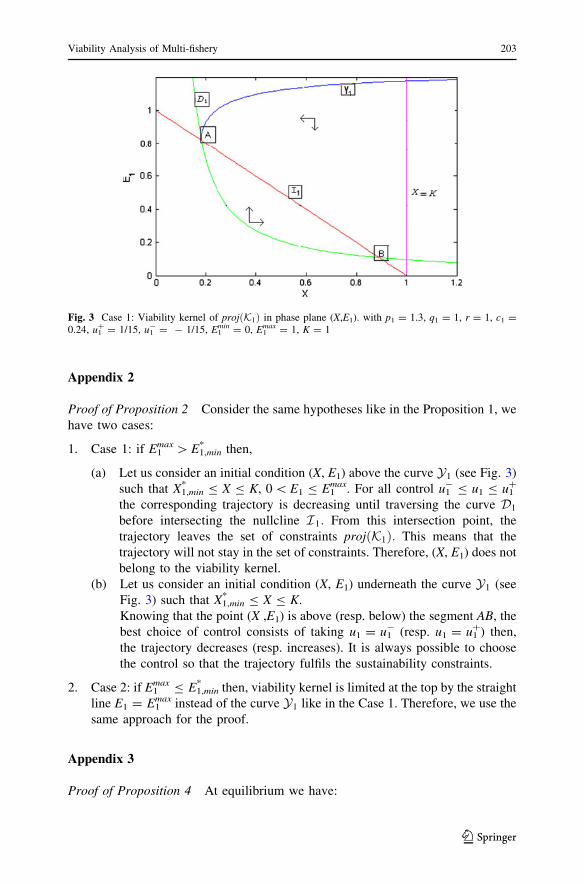
Proposition 2 Under the same hypotheses in (1) one of the two following casesoccurs:
1. Case 1: if E1max [ E1,min
* , then
ViabðprojðK1ÞÞ ¼ ðX;E1ÞX�1;min�X�K; and ðX;E1Þ
is between the curvesD1 and Y1
����
� �
where Y1 ¼ ðXð:Þ;E1ð:ÞÞis solution of the following Cauchy problem,
_X ¼ �FðXÞ þ q1E1X_E1 ¼ �u�1
X0 ¼ X�1;min; E0 ¼ E�1;min:
8<
:
2. Case 2: if E1max B E1,min
* , then,
ViabðprojðK1ÞÞ ¼ ðX;E1ÞXmax
1 �X�K; if E1�Emax1 and
ðX;E1Þ is above curveD1
����
� �
Proof See ‘‘Appendix 2’’. h
Remark 3 The curve Y1 defines the upper boundary of the viability kernel,
Y1represents the states of the system where it is necessary to change the control and
thus fishing effort in order to prevent the system from leaving the set of the
constraints.
We have made the same work with the fleet 2 by considering that E1 = 0, in the
same way we obtain the following results:
Proposition 3 Under hypotheses (3), (6) and (7) and under the followingconditions:
r� r0� ¼ 4p2q22Kðuþ2 þ L2Þ
ðc2 � p2q2KÞ2
Emax2 �E�2;max
the set of viable equilibrium points is given by:
A0B0 ¼ X�;r
q2
1� X�
K
� �� �
maxðX0max;X�2;minÞ�X�X�2;max
���
� �
and the viability kernel ViabðprojðK2ÞÞ is given by:
1. Case 1: if E2max [ E2,min
* then,
ViabðprojðK2ÞÞ ¼ ðX;E2ÞX�2;min�X�K; and ðX;E2Þ
is between the curvesY2 andD2
����
� �
where Y2 ¼ ðXð:Þ;E2ð:ÞÞ is solution following Cauchy problem,
Viability Analysis of Multi-fishery 195
123
_X ¼ �FðXÞ þ q2E2X_E2 ¼ �u�2
E0 ¼ E�2;min; X0 ¼ X�2;min
8<
:
2. Case 2: if E2max B E2,min
* then
ViabðprojðK2ÞÞ ¼ ðX;E2ÞX�2;min�X�K; if 0\E2�Emax
2 andðX;E2Þ is above curve D2:
����
� �
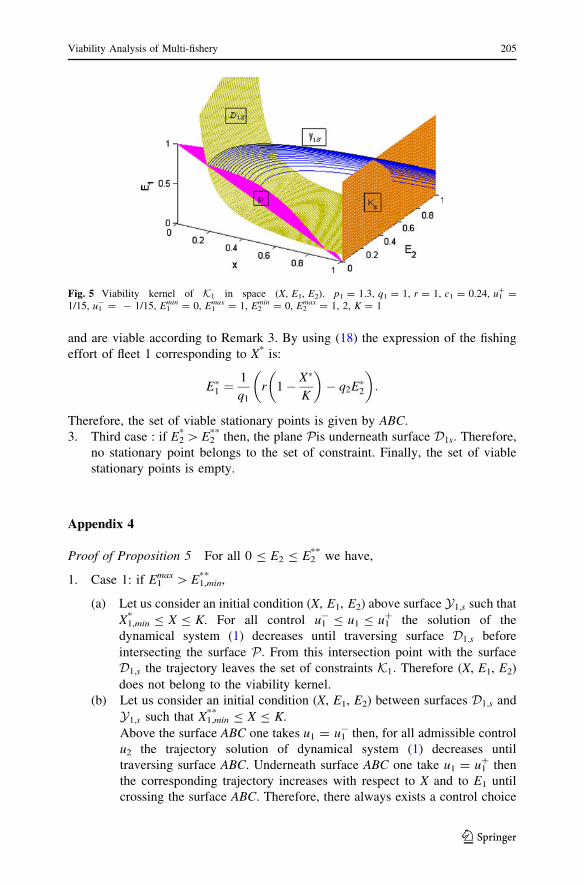
3.2.3 Viable Equilibrium Points in Space (X, E1, E2)
After having determined the viability kernel of constraint sets K1 and K2 in the
phase planes (X, E1) and (X, E2), it remains to find out the viability kernel
corresponding to each set of constraints in space (X, E1, E2).
In the space (X, E1, E2) the goal is to determine the compatibility of controlled
dynamics (1) and the set of constraints K1: Also, we will determine the viability
kernel of K1: First, we should identify the viable equilibrium points.
To avoid the exclusion of one of the two fleets, it is necessary to compel the
fishing efforts to remain upper a positive quantity and lower than a limited capacity.