Page 1
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weighted and Controlled Frames
P. BalazsAcoustics Research Institute,
Austrian Academy of Sciences
joint work with J.P.-Antoinesupported by HASSIP
Strobl07Trends in Harmonic Analysis
June 18-22, 2007Strobl, Salzburg, AUSTRIA
Page 2
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weighted and Controlled Frames
1 IntroductionFramesMotivation
2 Controlled FramesNumerical Aspects of Controlled Frames
3 Weighted FramesWeighted Frames as Controlled FramesConnection to Frame MultipliersInversion with Weights
4 Conclusion and Perspectives
Page 3
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weighted and Controlled Frames
1 IntroductionFramesMotivation
2 Controlled FramesNumerical Aspects of Controlled Frames
3 Weighted FramesWeighted Frames as Controlled FramesConnection to Frame MultipliersInversion with Weights
4 Conclusion and Perspectives
Page 4
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weighted and Controlled Frames
1 IntroductionFramesMotivation
2 Controlled FramesNumerical Aspects of Controlled Frames
3 Weighted FramesWeighted Frames as Controlled FramesConnection to Frame MultipliersInversion with Weights
4 Conclusion and Perspectives
Page 5
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weighted and Controlled Frames
1 IntroductionFramesMotivation
2 Controlled FramesNumerical Aspects of Controlled Frames
3 Weighted FramesWeighted Frames as Controlled FramesConnection to Frame MultipliersInversion with Weights
4 Conclusion and Perspectives
Page 6
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Introduction
Page 7
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Frames
Definition
A sequence (ψn, n ∈ Γ) is called a frame for the Hilbertspace H, if there exist constants m > 0 and M <∞ suchthat
m ‖f‖2 6∑n∈Γ
|〈f , ψn〉|2 6 M ‖f‖2 ,∀ f ∈ H.
m is a lower, M an upper frame bound. If the bounds can bechosen such that m = M, the frame is called tight.
Frame operator:
L(f ) =∑
n
〈f , ψn〉ψn.
Canonical dual frame:(ψ̃n
)=(L−1ψn
), with
f =∑n∈Γ
⟨f , ψ̃n
⟩ψn∀f ∈ H.
Page 8
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Frames
Definition
A sequence (ψn, n ∈ Γ) is called a frame for the Hilbertspace H, if there exist constants m > 0 and M <∞ suchthat
m ‖f‖2 6∑n∈Γ
|〈f , ψn〉|2 6 M ‖f‖2 ,∀ f ∈ H.
m is a lower, M an upper frame bound. If the bounds can bechosen such that m = M, the frame is called tight.
Frame operator:
L(f ) =∑
n
〈f , ψn〉ψn.
Canonical dual frame:(ψ̃n
)=(L−1ψn
), with
f =∑n∈Γ
⟨f , ψ̃n
⟩ψn∀f ∈ H.
Page 9
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Motivation
Mm = κ(L) condition number: numerical behavior
Page 10
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Motivation
Mm = κ(L) condition number: numerical behavior
[5] : weighted and controlled frames numerical tool for spher-ical wavelets.
Here investigated in detail!
Page 11
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Controlled Frames
Page 12
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Controlled Frames
GL(H1,H2): bounded operators with bounded inverse.GL(+)(H): positive operators in GL(H).
Definition
C ∈ GL(H). A C-controlled frame is a family of vectorsΨ = (ψn ∈ H : n ∈ Γ), such that there exist two constantsmCL < 0 and MCL <∞ satisfying
mCL ‖f‖2 6∑
n
〈ψn, f 〉 〈f ,Cψn〉 6 MCL ‖f‖2 , for all f ∈ H.
LCf =∑n∈Γ
〈ψn, f 〉Cψn is the controlled frame operator.
Equivalent to Lc ∈ GL(+)(H).
Page 13
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Controlled Frames
Proposition
Ψ a C-controlled frame. Then Ψ is a classical frame.Furthermore C L = L C∗ and so∑n∈Γ
〈ψn, f 〉Cψn =∑n∈Γ
〈Cψn, f 〉ψn.
=⇒ Generalized criterion to check if a given sequenceconstitutes a frame.
Theorem
C ∈ GL(H) self-adjoint. Ψ is a C-controlled frame if and onlyif it is a (classical) frame for H, C is positive and commuteswith the frame operator L.
Page 14
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Controlled Frames
Proposition
Ψ a C-controlled frame. Then Ψ is a classical frame.Furthermore C L = L C∗ and so∑n∈Γ
〈ψn, f 〉Cψn =∑n∈Γ
〈Cψn, f 〉ψn.
=⇒ Generalized criterion to check if a given sequenceconstitutes a frame.
Theorem
C ∈ GL(H) self-adjoint. Ψ is a C-controlled frame if and onlyif it is a (classical) frame for H, C is positive and commuteswith the frame operator L.
Page 15
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Controlled Frames
Proposition
Ψ a C-controlled frame. Then Ψ is a classical frame.Furthermore C L = L C∗ and so∑n∈Γ
〈ψn, f 〉Cψn =∑n∈Γ
〈Cψn, f 〉ψn.
=⇒ Generalized criterion to check if a given sequenceconstitutes a frame.
Theorem
C ∈ GL(H) self-adjoint. Ψ is a C-controlled frame if and onlyif it is a (classical) frame for H, C is positive and commuteswith the frame operator L.
Page 16
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Numerical Aspects of Controlled Frames
L−1C C = (CL)−1 C = L−1: finding C for controlled frame ⇐⇒
preconditioning! (I.e.: Instead of solving Ax = b, solvePAx = Pb.)
If κ(LC) = MCLmCL
< Mm = κ(L) =⇒ iterative algorithms get more
efficient .
ε := MCL−mCLMCL+mCL
=⇒ For n-th iteration gn ‖f − gn‖ 6 εn ‖f‖Cn .
Page 17
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Numerical Aspects of Controlled Frames
L−1C C = (CL)−1 C = L−1: finding C for controlled frame ⇐⇒
preconditioning! (I.e.: Instead of solving Ax = b, solvePAx = Pb.)
If κ(LC) = MCLmCL
< Mm = κ(L) =⇒ iterative algorithms get more
efficient .
ε := MCL−mCLMCL+mCL
=⇒ For n-th iteration gn ‖f − gn‖ 6 εn ‖f‖Cn .
Page 18
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Preconditioning
Preconditioning for Gabor frames [4]:
Convergence with iteration : Relative difference of iteration steps (Gaussian
window, n = 1440, a = 32 and b = 30.)
Page 19
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weighted Frames
Page 20
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weighted Frames
Definition
Let Ψ = (ψn : n ∈ Γ) be a sequence of elements in H and(wn : n ∈ Γ) ⊆ R+
∗ a sequence of strictly positive weights. Thispair is called a w-frame of H if there exist constants m > 0 andM <∞ such that
mw ‖f‖2 6∑n∈Γ
wn |〈f , ψn〉|2 6 Mw ‖f‖2.
For (ωn) ⊆ C we call (ωnψn) a weighted frame if this sequenceforms a frame, i.e.,
momega ‖f‖2 6∑n∈Γ
|ωn|2 |〈f , ψn〉|2 6 Mω ‖f‖2.
‘weighted frame’ 6= ‘w-frame’!Related to signed frames [6].
Page 21
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weighted Frames as Controlled Frames
Weighted frames = controlled frames?
Cψk := wkψk
But:
C
(∑k
ckψk
):=∑
ckCψk =∑
ckwkψk
is in general not well defined!And
C
(∑k
⟨f , ψ̃k
⟩ψk
):=∑
k
⟨f , ψ̃k
⟩wkψk
does not ensure Cψk = wkψk! (See [3].)Example: wn = −1 ⇒ (wnψn) a frame for every frameΨ = (ψn). Not a controlled frame, because C ≡ −1 isself-adjoint, but not positive.
Page 22
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weighted Frames as Controlled Frames
Weighted frames = controlled frames?
Cψk := wkψk
But:
C
(∑k
ckψk
):=∑
ckCψk =∑
ckwkψk
is in general not well defined!And
C
(∑k
⟨f , ψ̃k
⟩ψk
):=∑
k
⟨f , ψ̃k
⟩wkψk
does not ensure Cψk = wkψk! (See [3].)Example: wn = −1 ⇒ (wnψn) a frame for every frameΨ = (ψn). Not a controlled frame, because C ≡ −1 isself-adjoint, but not positive.
Page 23
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weighted Frames as Controlled Frames
Weighted frames = controlled frames?
Cψk := wkψk
But:
C
(∑k
ckψk
):=∑
ckCψk =∑
ckwkψk
is in general not well defined!And
C
(∑k
⟨f , ψ̃k
⟩ψk
):=∑
k
⟨f , ψ̃k
⟩wkψk
does not ensure Cψk = wkψk! (See [3].)Example: wn = −1 ⇒ (wnψn) a frame for every frameΨ = (ψn). Not a controlled frame, because C ≡ −1 isself-adjoint, but not positive.
Page 24
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weighted Frames as Controlled Frames
Suppose: ∃C with Cψk = wkψk.
Corollary
Let C ∈ GL(H) be self-adjoint and diagonal on Ψ = (ψn) andassume it generates a controlled frame. Then the sequence(wn), which verifies the relations Cψn = wnψn, is positive andsemi-normalized, i.e. there are bounds b > a > 0, such thata 6 |cn| 6 b.
Page 25
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Semi-normalized Weights
Lemma
Let (wn) be a semi-normalized sequence with bounds a,b.Then if (ψn) is a frame with bounds m and M, (wnψn) is alsoa frame with bounds a2m and b2M. The sequence
(wn
−1ψ̃n
)is a dual frame.
Page 26
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Examples
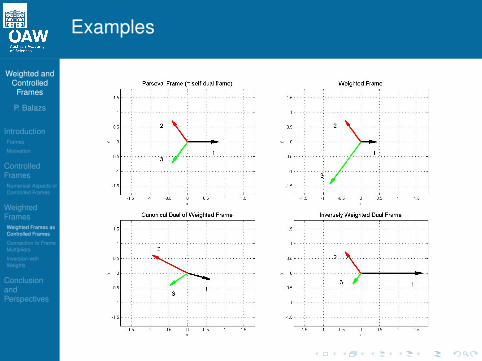
(wn
−1ψ̃n
)is a dual, but not the canonical dual.
Example: Parseval frame, i.e. self-dual frame:
Ψ ={(
0.81650
),
(−0.40820.7071
),
(−0.4082−0.7071
)}weights: (w1,w2,w2) = ( 1
2 , 1, 2).
Page 27
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Examples
Page 28
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Examples
Weights (wn = ±1) =⇒ frame with same bounds.
Also valid for Non-semi-normalized weights? It is ingeneral not enough for the weights to be strictlypositive, wn > 0.Example: ONB (en) , ψn = 1
n en. This is not a frame!
(ψn = 1n en) with the weight (wn = n) ⇒ frame.
Page 29
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Examples
Weights (wn = ±1) =⇒ frame with same bounds.
Also valid for Non-semi-normalized weights? It is ingeneral not enough for the weights to be strictlypositive, wn > 0.Example: ONB (en) , ψn = 1
n en. This is not a frame!
(ψn = 1n en) with the weight (wn = n) ⇒ frame.
Page 30
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Examples
Weights (wn = ±1) =⇒ frame with same bounds.
Also valid for Non-semi-normalized weights? It is ingeneral not enough for the weights to be strictlypositive, wn > 0.Example: ONB (en) , ψn = 1
n en. This is not a frame!
(ψn = 1n en) with the weight (wn = n) ⇒ frame.
Page 31
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Connection to Frame Multipliers
Frame multipliers [1]: Mm,ψn f =∑
nmn 〈f , ψn〉ψn.
Theorem
Let (ψn) be a sequence of elements in H. Let (wn) be a sequence ofpositive, semi-normalized weights. Then the following properties areequivalent:
1 (ψn) is a frame.
2 Mwn,ψn is a positive and invertible operator.
3 There are constants m′ > 0 and M′ <∞ such that
m′ ‖f‖2 6∑n∈Γ
〈f , ψn〉wn ψn 6 M′ ‖f‖2 .
4 (√
wnψn) is a frame.
5 M(w′n),(ψn) is a positive and invertible operator for any positive,
semi-normalized sequence (w′n).
6 (wnψn) is a frame.
Page 32
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Connection to Frame Multipliers
Frame multipliers [1]: Mm,ψn f =∑
nmn 〈f , ψn〉ψn.
Theorem
Let (ψn) be a sequence of elements in H. Let (wn) be a sequence ofpositive, semi-normalized weights. Then the following properties areequivalent:
1 (ψn) is a frame.
2 Mwn,ψn is a positive and invertible operator.
3 There are constants m′ > 0 and M′ <∞ such that
m′ ‖f‖2 6∑n∈Γ
〈f , ψn〉wn ψn 6 M′ ‖f‖2 .
4 (√
wnψn) is a frame.
5 M(w′n),(ψn) is a positive and invertible operator for any positive,
semi-normalized sequence (w′n).
6 (wnψn) is a frame.
Page 33
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Current development:finding weights
Page 34
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Inversion with Weights
Weighted frames 6= controlled frames. Preconditioningapproach not possible!
So how can weights be found, such that the quotient of thebounds become smaller?
Page 35
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weights by ’Guessing’
Example: Suppose the frame element ψk0 is not orthogonal to therest, let
wk ={
0 k = k01 otherwise .
=⇒ weighted frame!Look at definition:
m ‖f‖2 6∑n∈Γ
|〈f , ψn〉|2 6 M ‖f‖2
Guess: use measure how ’important’ a frame element is:
w(2)n =
‖ψn‖2∑k|〈ψn, ψk〉|2
.
For the case of weighted ONBs this certainly finds the optimalsolution. Or
w(∞)n =
‖ψn‖sup
k|〈ψn, ψk〉|
.
Page 36
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weights by ’Guessing’
Example: Suppose the frame element ψk0 is not orthogonal to therest, let
wk ={
0 k = k01 otherwise .
=⇒ weighted frame!Look at definition:
m ‖f‖2 6∑n∈Γ
|〈f , ψn〉|2 6 M ‖f‖2
Guess: use measure how ’important’ a frame element is:
w(2)n =
‖ψn‖2∑k|〈ψn, ψk〉|2
.
For the case of weighted ONBs this certainly finds the optimalsolution. Or
w(∞)n =
‖ψn‖sup
k|〈ψn, ψk〉|
.
Page 37
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weights by ’Guessing’
Example: Suppose the frame element ψk0 is not orthogonal to therest, let
wk ={
0 k = k01 otherwise .
=⇒ weighted frame!Look at definition:
m ‖f‖2 6∑n∈Γ
|〈f , ψn〉|2 6 M ‖f‖2
Guess: use measure how ’important’ a frame element is:
w(2)n =
‖ψn‖2∑k|〈ψn, ψk〉|2
.
For the case of weighted ONBs this certainly finds the optimalsolution. Or
w(∞)n =
‖ψn‖sup
k|〈ψn, ψk〉|
.
Page 38
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weights by Best Approximation with FrameMultiplier
This question can be “translated” to the frame multipliercontext: Approximate the identity as a frame multiplier?
The symbol of the best approximation of the identity by aframe multiplier using Hilbert-Schmidt topology will be usedas the weights w(mult).
The best approximation of an operator T ∈ HS(H) by aframe multiplier Mw(m),ψk
fixing the frame is given [2] by
P(T) =∑
k
[(|Gψk |
2)†〈Tψk, ψk〉H
]ψk ⊗ ψk
Page 39
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Weights by Best Approximation with FrameMultiplier
This question can be “translated” to the frame multipliercontext: Approximate the identity as a frame multiplier?
The symbol of the best approximation of the identity by aframe multiplier using Hilbert-Schmidt topology will be usedas the weights w(mult).
The best approximation of an operator T ∈ HS(H) by aframe multiplier Mw(m),ψk
fixing the frame is given [2] by
P(T) =∑
k
[(|Gψk |
2)†〈Tψk, ψk〉H
]ψk ⊗ ψk
Page 40
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Numerical tests
Sample data for frames with 4 elements in 2 dimensions:
Out of 100000 runs the guessed weight improved the condition number 100000 times.Weights by approximation with multiplers improved the condition number 59686 times.Weights by approximation with multiplers were the best solution 31244 times.
Page 41
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Numerical tests
M = 4, dim = 3
Page 42
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Numerical tests
M = 6, dim = 3
Page 43
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Numerical tests
M = 11, dim = 10
Page 44
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Numerical tests
M = 20, dim = 10
Page 45
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Perspectives
Page 46
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Perspectives
Best approximation by multipliers in operator norm, e.g.using LMIs.
Further numerical tests to find better guesses.Investigate partial algebra structure of multipliers
Page 47
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Perspectives
Best approximation by multipliers in operator norm, e.g.using LMIs.
Further numerical tests to find better guesses.Investigate partial algebra structure of multipliers
Page 48
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Perspectives
Best approximation by multipliers in operator norm, e.g.using LMIs.
Further numerical tests to find better guesses.Investigate partial algebra structure of multipliers
Page 49
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Conclusions
Introduced controlled framesThey give a generalized way to check frame condition.Are equivalent to preconditioning.
Introduced weighted framesIn general not controlled frames.Gave first data how to find good weights to find a (notthe) dual.
Page 50
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Conclusions
Introduced controlled framesThey give a generalized way to check frame condition.Are equivalent to preconditioning.
Introduced weighted framesIn general not controlled frames.Gave first data how to find good weights to find a (notthe) dual.
Page 51
Weighted andControlled
Frames
P. Balazs
IntroductionFrames
Motivation
ControlledFramesNumerical Aspects ofControlled Frames
WeightedFramesWeighted Frames asControlled Frames
Connection to FrameMultipliers
Inversion withWeights
ConclusionandPerspectives
Thank you.
P. Balazs.Basic definition and properties of Bessel multipliers.Journal of Mathematical Analysis and Applications, 325(1):571–585, January 2007.
P. Balazs.Hilbert-Schmidt operators and frames - classification and approximation.submitted, 2007.
P. Balazs.Matrix-representation of operators using frames.accepted for Sampling Theory in Signal and Image Processing (STSIP), 2007.
P. Balazs, H. G. Feichtinger, M. Hampejs, and G. Kracher.Double preconditioning for Gabor frames.IEEE Transactions on Signal Processing, 54(12):4597–4610, December 2006.
I. Bogdanova, P. Vandergheynst, J.-P. Antoine, L. Jacques, and M. Morvidone.Stereographic wavelet frames on the sphere.Applied and Computational Harmonic Analysis, 19:223–252, 2005.
I. Peng and S. Waldon.Signed frames and Hadamard products of Gram matrices.Linear Algebra Appl., 347:131–157, 2002.