Page 1
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 1/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
1
INTERPRETATION OF FREQUENCY-DEPENDENT DUAL-
LATEROLOG MEASUREMENTS ACQUIRED IN MIDDLE-EAST
CARBONATE RESERVOIRS USING A SECOND-ORDER FINITE-
ELEMENT METHOD
Wei Yang, and Carlos Torres-Verdín, The University of Texas at Austin; Ridvan Akkurt, Saleh Al-Dossari, and
Abdullah Al-Towijri, Saudi Aramco; Haluk Ersoz, Halliburton
Copyright 2007, held jointly by the Society of Petrophysicists and Well LogAnalysts (SPWLA) and the submitting authors.
This paper was prepared for presentation at the SPWLA 48th Annual LoggingSymposium held in Austin, Texas, United States, June 3-6, 2007.
ABSTRACT
Laterolog tools operate at low frequencies because of
prevalent contact-impedance noise at electrodelocations. However, most existing laterolog modeling
codes are based on zero-frequency (DC) electrical-
potential formulations. In this paper, we develop a newsecond-order finite-element algorithm to simulate the
frequency-dependent laterolog response of axially-
symmetric, invaded and anisotropic formations. Whencompared to first-order (linear) DC finite-element
solutions, the new algorithm provides enhanced
accuracy due to the implementation of second-order
shape functions. In addition, numerical results indicate
that the new algorithm can accurately simulate cases ofextreme contrast in electrical resistivity such as those
arising in the presence of steel casing, air, or anhydrite
layers.
To benchmark the reliability, accuracy, and
applicability of the new simulation algorithm, we
consider the specific electrode configuration ofHalliburton Energy Services’ Dual Laterolog Logging
Tool (DLLT-BTM) to reproduce measurements acquired
in Middle-East carbonate reservoirs. Numerical
simulations incorporate the tool electrode and insulator
dimensions as well as the operating modes of the deep-(LLD) and shallow-sensing (LLS) measurements at
their respective frequencies. Our simulations indicate
that non-DC measurements are affected by the presence
of steel casing. We quantify the influence of anhydritelayers of varying thickness located immediately below
the casing shoe on measurements acquired across porous and permeable carbonate reservoirs. Simulations
show that laterolog apparent resistivities acquired
across low-resistivity carbonate reservoirs shouldered
by anhydrite beds could exhibit a slight bias and also
give a false indication of invasion. In such complex
environments, reliable assessment of hydrocarbonsaturation can only be accomplished with accurate
simulations of laterolog measurements.
INTRODUCTION
Laterolog measurements use a galvanic conduction
principle to excite electrical conduction in rock
formations penetrated by a borehole. While essentiallyDC in nature (Lacour-Gayet, 1981), a strictly zero-
frequency laterolog measurement is impractical due to
contact-impedance noise at electrode locations.
Laterolog measurements are commonly acquired in thefrequency range from 10 Hz to 2 KHz (Anderson,
2001). The application of non-zero values of frequencyoften complicates the interpretation of laterolog
measurements in the presence of large contrasts of
electrical resistivity, including the conspicuous
examples of the so-called Delaware and Groningen
effects (Anderson, 2001, Lacour-Gayet, 1981, Lovell,1993, Trouiller et al., 1978, Woodehouse, 1978).
Most of the available laterolog modeling codes are
based on voltage potential formulations (Li et al., 1995,Yang et al., 1997, Zhang, 1986). Such simulation
methods are strictly accurate only at DC (Lovell, 1993).Lovell (1993) and Zhang (1986) proposed a simulationmethod based on the solution of the partial differential
equation of the current potential. The latter method can
simulate finite-frequency measurements and enables the
efficient calculation of electric current lines. Chen et al.
(1998) utilized the same method for the case of DCsimulations and described the corresponding spatial
distribution of electric current lines. Lovell (1993)
applied a similar simulation method for the non-zerofrequency (AC) case but did not document simulation
results for the case of dual laterolog measurements.
The linear (i.e., first order) finite-element method(FEM) is typically used to simulate laterolog
measurements (Li et al., 1995, Lovell, 1993, Yang et
al., 1997, Zhang, 1986). Experience shows that the
accuracy of the first-order FEM is acceptable in the presence of low to moderate contrasts of electrical
resistivity. However, in extreme contrast situations,
such as those that involve steel casing (resistivity
approximately equal to 2e-7 Ω-m), air, halite, andanhydrite layers (all of them exhibiting practically
infinite electrical resistivity) the accuracy of the first-
Page 2
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 2/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
2
order FEM is not adequate to reproduce the
measurements.
In this paper, we develop a second-order FEM method
based on the solution of the current potential to
simulate frequency-dependent dual laterologmeasurements in invaded and anisotropic formations.First, we introduce the mathematical formulation, the
associated boundary conditions, and the second-order
FEM variational formulation. We consider the specific
electrode configuration of Halliburton Energy Services’Dual Laterolog Logging Tool (DLLT-BTM) to perform
the numerical simulations. Subsequently, we discussseveral benchmarking examples and draw conclusions
about the accuracy and reliability of our simulation
method. Additional simulation results are discussed
based on laterolog measurements acquired in Middle-
East carbonate formations that include hydrocarbon-
bearing carbonate formations invaded with water-basemud and shouldered by anhydrite beds. The objective
of the latter studies is to assess whether shallow- and
deep-sensing laterolog measurements across porous and permeable carbonate layers remain affected by the
concomitant presence of casing and anhydrite beds.
FORMULATION
Assuming a time harmonic excitation of the form i t e
ω − ,
Maxwell’s equations are given by (Lovell, 1993)
iωμ ∇ × =E H , σ ∇ × = +H E J , (1)
where E and H are the electric and magnetic field
vectors, respectively, μ is the magnetic permeability,
σ is the complex-valued anisotropic conductivity
tensor, J is the impressed current density, σ E is the
induced current density, 1−=i , ω is radian frequency,
and t is time. For the case of transverse-magnetic (TM)
excitation in cylindrical coordinates ( ρ ,φ, z), the onlynon-zero components of the electric and magnetic fields
are , H E φ ρ and
z E . Thus, from Eq. (1) it follows that (Jin
et al., 1999)
1
ˆ ˆ( ) H i H M φ φ φ φ σ φ ωμ −
⋅∇× ∇× + = , (2)
where φ is the unit vector in the azimuthal direction,
and M φ
is the magnetic current density in the
azimuthal direction, defined as
1ˆ ( ) z
z
J J M
z
ρ
φ
ρ
φ σ σ ρ σ
− ⎛ ⎞⎛ ⎞∂ ∂
= ⋅∇× ⋅ = − ⎜ ⎟⎜ ⎟ ⎜ ⎟∂ ∂⎝ ⎠ ⎝ ⎠J , (3)
where ρ σ and
zσ are the horizontal and vertical
electrical conductivities, respectively. Equation (2) can
be written as
( )1 1
z
H H i H M
z z
φ φ
φ φ
ρ
ρ ωμ
ρ ρσ ρ σ
⎛ ⎞∂ ∂⎛ ⎞∂ ∂− − + =⎜ ⎟⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂
⎝ ⎠ ⎝ ⎠
. (4)
With the definition 2 J H φ πρ = , we rewrite Eq. (4) as
1 12
z
J J i J M
z z φ
ρ
ωμ π
ρ ρσ ρ ρσ ρ
⎛ ⎞⎛ ⎞∂ ∂ ∂ ∂− − + =⎜ ⎟⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠
. (5)
Physically, the connecting lines of J are exactly the
electric current lines excited in the formation by theimpressed galvanic source. In fact, the excitation term
2 M φ π can be imposed with the boundary conditions
shown in Figure 1. Finally, the energy functional used
in our finite-element (FE) simulation algorithm is given by
2 2
21 1 1 1( )
2 z
J J F J i J d dz
z ρ
ωμ ρ π σ ρ σ ρ Ω
⎡ ⎤⎛ ⎞∂ ∂⎛ ⎞= + +⎢ ⎥⎜ ⎟⎜ ⎟∂ ∂⎝ ⎠⎝ ⎠⎢ ⎥⎣ ⎦
∫, (6)
where Ω is the spatial domain of the simulations.
BOUNDARY CONDITIONS AND TOOL
DESCRIPTION
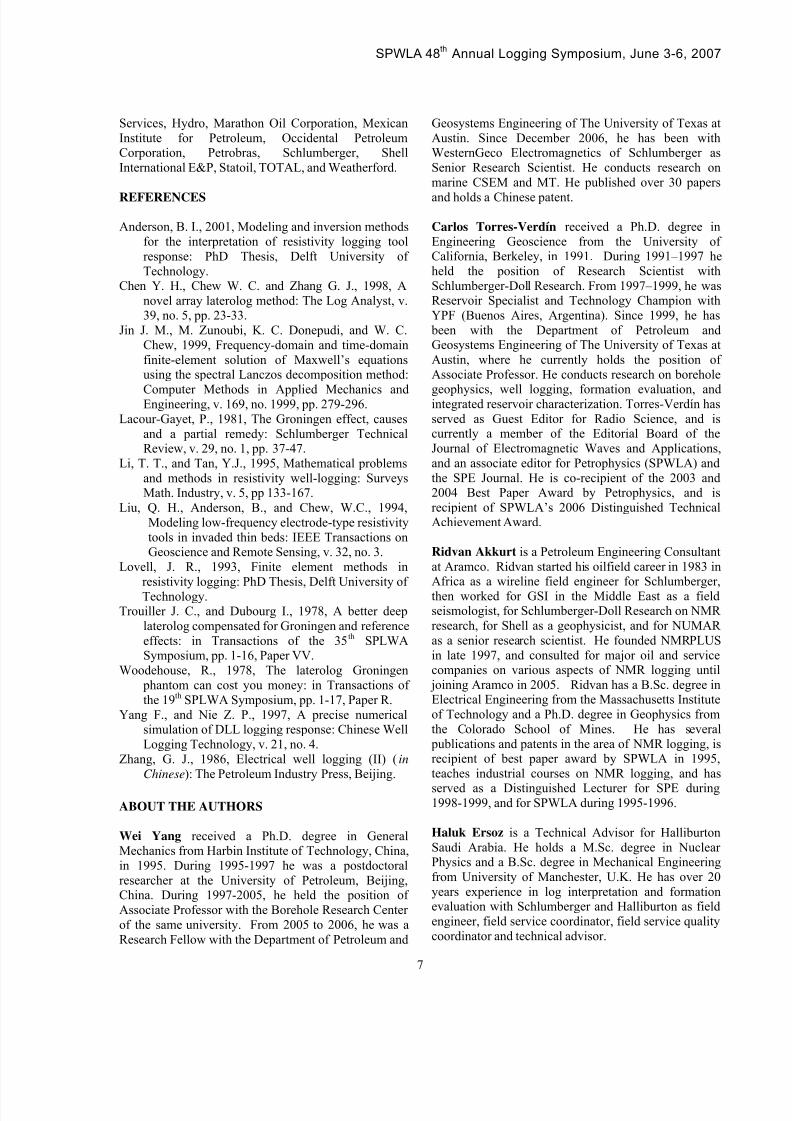
Figure 1 describes the computational domainsΩLLD and
ΩLLS for the deep-and shallow-sensing laterolog modes,
respectively. The domain termination boundary isdenoted as m1. Figure 2 shows the configuration of the
laterolog tool adopted in this paper for the deep- and
shallow-sensing modes. Such a configurationcorresponds to Halliburton Energy Services’ Dual
Laterolog Logging Tool (DLLT-BTM), which operates
at 131.25 Hz for the deep-sensing mode and at 1050 Hzfor the shallow-sensing mode. In Figure 1, the letter B
identifies the current return electrode, placed 33 m
away from the A2 electrode. Electrodes are denoted as
, 1,...,11im i = starting from the electrode placed at
infinity and proceeding counterclockwise. The insulator
adjacent to the electrode im is denoted as im ′ . In the
voltage potential method, homogeneous Neumann
boundary conditions are enforced on insulators (these
conditions are automatically satisfied in finite-elementformulations). We enforce Dirichlet and equipotential
surface boundary conductions at electrode locations,
with the number of boundary conditions equal to the
number of electrodes. Because of the duality of thevoltage potential method, the current potential method
requires the enforcement of boundary conditions on the
insulators, with the number of enforced boundaryconditions equal to the number of insulators. These
Page 3
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 3/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
3
boundary conditions are given by (Chen et al., 1998):
' '1 1
' '2 2
' ' '3 3 10
' ' ' ' ' ' '4 9 11 4 9 10 11
' '5 5
' '6 6
' ' ' '7 6 7 6
' '8 8
' '9 11
Deep Laterolog Shallow Laterolog
1. 0 0
2. ? ?
3. 0
4. 1 1
5. 0 0
6. ? ?
7.
8. 0 0
9. 1
m m
m m
m m m
m m m m m m m
m m
m m
m m m m
m m
m m
J J
V V
V V V
V V V V V V V
V V
V V
V V V V
V V
V V
= =
= =
= = −
= − = − + = − = − + +
= =
= =
= − = −
= =
= − ' ' '9 10 11
' '10 10
' '11 11
1
10. 0 ?
11. ? ?
m m m
m m
m m
V V V
V V
V V
= − −
= =
= =
(7)
where '
im
V is the voltage decay on insulator'
im . The
above conditions are often referred to as equipotential
surface conditions which have to be enforced by aseries of superposition operations on the finite-element
stiffness matrix (Li et al., 1995, Zhang, 1986).
Conditions on the current potential are of the Dirichlettype and can be enforced directly. In Condition 1, the
current potential J at the top insulator'
1m is defined as
zero. Condition 2 designates '2m
V as an unknown
parameter which needs to be determined by theenforcement of constraint conditions. Condition 3
ensues because the electrode 2 A is always connected
to 2 A ′ . There is an unknown parameter in this equation
for the case of the shallow-sensing mode. However, for
the case of the deep-sensing mode, the voltage
difference between 2 A and 1 A is 0. Condition 4 ensues
because the electrode 1 A is always connected to 1 A′ . In
Condition 5, the voltage difference between the
electrodes 2 M and 1 M is 0. Condition 6 defines '6m
V
as an unknown parameter. Condition 7 ensues because
the electrode 1 M is always connected to 1 M ′ .
Condition 8 enforces that the voltage difference
between 1 M ′
and 2 M ′
be 0. Condition 9 is based onthe fact that the voltage difference between 2 M ′ and
infinity is 1; i.e., ' ' '9 10 11
1m m m
V V V + + = . Condition 10
identifies '10m
V as the zero voltage difference between
electrodes 1 A′ and 2 A ′ (deep-sensing mode) or else as
an unknown parameter (shallow-sensing mode).
Condition 11 designates '11m
V as the unknown voltage
difference between 2 A ′ and infinity.
In the above boundary conditions, there are threeunknowns for the case of the deep-sensing laterolog
mode: '2m
V , '6m
V and '11m
V . For the case of the shallow-
sensing laterolog mode, the unknowns are '2mV , '
6mV ,
'10m
V and '11m
V . Therefore, one needs to include three
constraint conditions for the deep-sensing laterolog
mode and four conditions for the shallow-sensing
laterolog mode. These conditions are expressed as
' ' ' ' ' ' ' '9 8 5 4 9 8 5 4
' ' ' ' ' ' ' '8 7 6 5 8 7 6 5
' '11 11
'2
DeepLaterolog Shallow Laterolog
1. 0 0
2. 0 0
3. 0 0
4. 0
m m m m m m m m
m m m m m m m m
m m
m
J J J J J J J J
J J J J J J J J
J J
J
− + − = − + − =
− + − = − + − =
= =
=
, (8)
where the first condition ensures that the total current
on 2 M and 2 M ′ be 0, the second conditions ensures that
the total current on 1 M and 1 M ′ be 0, the third equation
ensures that the current flow at infinity be 0, and the
fourth equation ensures that the current at electrode B
be 0 for the case of the shallow-sensing laterolog mode.
In similar fashion to the field superposition technique
used in the voltage potential method, one can solve for
the current potential using the principle of
superposition. In so doing, one divides the original
problem into four partial problems. Let(1) ( , ) J z ρ be the
solution to the energy functional (6) with
' '4 9
1, 1, 0m m
V V else= − = = ; (2 ) ( , ) J z ρ the solution to the
energy functional (6) with ' '6 7
1, 1, 0m m
V V else= = − = ;
(3)( , ) J z ρ the solution to the energy functional (6) with
'2
1, 0m
V else= = ;(4 )
( , ) J z ρ the solution to the energy
functional (6) with ' ' '11 9 4
1, 1, 1, 0m m m
V V V else= = − = = ;
and (5)( , ) J z ρ the solution to the energy functional (6)
with ' ' ' '10 4 9 3
1, 1, 1, 1, 0m m m m
V V V V else= = = − = − = .
Accordingly, the solution for the deep- and shallow-
sensing dual laterolog currents must be a linear
combination of ( )( , ), 1,...5
i J z i ρ = , respectively given
by
(1) (2) (3) (4)
(1) (2) (3) (4) (5)
Deep
Shallow
J J J J J
J J J J J J
α β γ
α β γ η
= + + +
= + + + +, (9)
where the constants , , ,α β γ η are determined from the
solution of Eq. (8). Moreover, because the voltage can
be specified for M2, it follows that
Page 4
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 4/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
4
' ' '9 10 11
1m m m
V V V + + = . (10)
The corresponding apparent resistivities are given by
( ) ( )( ) ( ) ( ) ( )
' ' ' '7 6 7 6
1 1,
R R R R Deep deep Shallow shallow
m m m mdeep shallow
R k R k J J J J
= =− −
, (11)
where ,deep shallowk k are the tool constants for deep- and
shallow-sensing laterolog modes, respectively, at 0 Hz.
These constants can be determined from simulations in
a homogenous medium where the measured apparent
resistivities , Deep Shallow R R are equal to the actual
resistivity of the probed medium. The
variables( ) ( )
' '7 6
, R R
m m J J identify the real part of the current
flowing on '7m and '
6m , respectively. Therefore,( ) ( )
' '7 6
R R
m m J J − identifies the real part of the current at the
electrode A0. A similar approach can be used to
calculate out-of-phase apparent resistivities.
SECOND-ORDER FE SOLUTION
To simulate the response of dual laterolog
measurements in the presence of large contrasts ofelectrical conductivity, we make use of second-order
shape functions in the finite-element formulation. The
shape function, shown schematically in Figure 3, is an
8-node quadrilateral element, with the correspondingtwo-dimensional interpolation function given by
2 2 2 2
1 2 3 4 5 6 7 8u x y xy x x x y xyα α α α α α α α = + + + + + + + , (12)
where x and y are the free variables and the subscripted
α values designate arbitrary real-valued constants.
Nodal values of shape function are then given by
[ ] [ ] [ ] [ ]
2
2
T T
1/ 4(1 )(1 )( 1) 1, 2,3, 4
1/ 2(1 )(1 ) 5,7
1/ 2(1 )(1 ) 6,8
1,1,1, 1,0,1,0, 1 , 1, 1,1,1, 1,0,1,0
i i i i i
i i
i i
i i
N i
N i
N i
ξ ξ η η ξ ξ ηη
ξ η η
η ξ ξ
ξ η
= + + + − =
= − + =
= − + =
= − − − = − − −
(13)
Figure 4 compares simulation results obtained with
first- and second-order finite-element methods for thecase of a single-layer invaded isotropic formation.
Figure 5 shows the second model used to compare the
two solution methods. It consists of a single-interface
formation and includes the presence of a borehole andvertically truncated steel casing. Electrical resistivity
contrasts considered in this model are extremely large.
Simulation results, shown in Figure 6, indicate that the
two solutions agree very well in the presence of low to
moderate contrasts of electrical resistivity. However,significant differences between the two methods are
observed in the presence of steel casing. The following
section describes benchmarking exercises undertaken to
appraise the accuracy of the second-order FEMdeveloped in this paper. We also describe examples
intended to study the sensitivity of the simulated
laterolog apparent resistivities to several extreme
conditions of measurement acquisition.
NUMERICAL RESULTS
Code Validation. We first verified the accuracy and
reliability of the new second-order simulation method
against (a) analytical solutions of point sources in a
homogeneous whole space (Zhang, 1986), (b) DCnumerical mode-matching solutions (Liu et al., 1994) in
layered and invaded formations including a borehole,and (c) existing DC first-order laterolog algorithms
based on the solution of the electric potential (Li et al.,
1995, Zhang, 1986) for layered and invaded formationsthat included a borehole. All the simulations were
performed on a Dell Dimension 8400 personal
computer. For the sake of conciseness, we omitgraphical results obtained from the above comparisons.
We note, however, that all the comparisons
conclusively indicated that the accuracy of the new
second-order finite-element algorithm was better than1% even in cases of large contrasts of electrical
resistivity. In what follows, we focus our attention to
specific comparisons performed between first- and
second-order finite-element solutions. All thesimulations are performed specifically for the laterolog
configuration described in Figure 2.
Figure 4 shows results from the first comparison
example at DC. The formation model consists of three
layers with a borehole. Mud resistivity is 1 Ω-m and
borehole diameter is 0.2m One of the layers is invaded.
Layer resistivities are 1, 50, and 1 Ω-m, with theresistivity of the invasion zone in the invaded layer
equal to 10 Ω-m (thickness equal to 2 m and radial
length of invasion equal to 0.2 m). Solid blue (solid
triangles) and dashed blue (open triangles) lines
identify deep laterolog measurements simulated withthe first- and second-order finite-element methods,
respectively. Solid red (solid circles) and dashed red(open circles) lines identify shallow laterolog
measurements simulated with the first- and second-
order finite-element methods, respectively. The dotted
purple line describes the actual value of modelresistivity, Rt . We observe that the two sets of
simulations agree very well with each other.
Page 5
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 5/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
5
Figure 5 shows the model constructed to perform the
second set of numerical comparisons. It consists of asingle layer interface and includes both a borehole and
steel casing. Mud resistivity is 1 Ω-m and borehole
diameter is 0.2 m. Layer resistivities are 1 and 10000
Ω-m, with their interface located at the relative verticallocation of -1 m. Casing thickness, electrical
resistivity, and relative magnetic permeability are equal
to 0.01 m, 2e-7 Ω-m, and 1, respectively. The lower
termination boundary of casing is located at the relative
vertical location of 1 m and the spatial domain of thesimulation is terminated at the relative vertical location
of 1000 m. Figure 6 describes the simulation resultsobtained with the first- and second-order finite-element
algorithms at DC. Simulations agree very well with
each other along depth segments with low contrasts of
electrical resistivity. However, we note a significantdifference between the two simulation results along the
depth range occupied by steel casing. Further testingwith a numerical mode-matching code indicated that
the relative error of the second-order finite-element
solution was below 1%, thereby confirming thereliability of the new simulation algorithm.
Effect of Electrical Anisotropy. The objective of thissimulation exercise is to shed light to the influence of
resistivity anisotropy on the electrical current lines
enforced within the formation probed by the deep- and
shallow-sensing laterolog modes. We consider aformation with horizontal and vertical resistivities equal
to 1 Ω-m and 2 Ω-m, respectively. Figures 7 and 8
show the electric current lines within the probed
formation calculated for the deep- and shallow-sensinglaterolog modes, respectively. Thick solid lines and thin
dashed lines identify electric current lines for the cases
of isotropic and anisotropic homogeneous formations,respectively. Electric current lines for the anisotropic
formation have a slightly enhanced tendency to flow in
the horizontal direction compared to those of the
isotropic formation because the assumed vertical
resistivity is larger than the vertical resistivity. Inaddition, Figure 8 indicates that electric current lines
for the shallow-sensing laterolog mode are slightly
more sensitive to the presence of electrical anisotropy
than those of the deep-sensing laterolog mode.
Figure 9 compares simulated laterolog measurements
for the cases of isotropic and anisotropic layeredformations. The formation model consists of three
layers (thickness of the center layer is 2 m) and includes
a borehole. Mud resistivity is 1 Ω-m and borehole
diameter is 0.2 m. For the isotropic case, layerresistivities are 1, 10, and 1 Ω-m, whereas for the
anisotropic case, vertical resistivities in the three layers
are 10, 100, and 10 Ω-m, respectively. Solid blue (solid
triangles) and red (solid circles) lines identify deep and
shallow laterolog measurements, respectively,
simulated for the isotropic case. Dashed blue (opentriangles) and red (open circles) lines identify deep- and
shallow-sensing laterolog measurements, respectively,
simulated for the anisotropic case. The dotted purple
and dashed cyan lines identify the actual horizontal ( Rh)and vertical formation resistivities ( Rv), respectively.
Simulations confirm that neither the shallow-sensing
nor the deep-sensing laterolog measurements possess
significant sensitivity to the presence of electrical
anisotropy (this results is consistent with the so-calledanisotropy paradox of laterolog measurements).
However, we observe that shallow-sensing laterologmeasurements exhibit a marginal sensitivity to
electrical anisotropy.
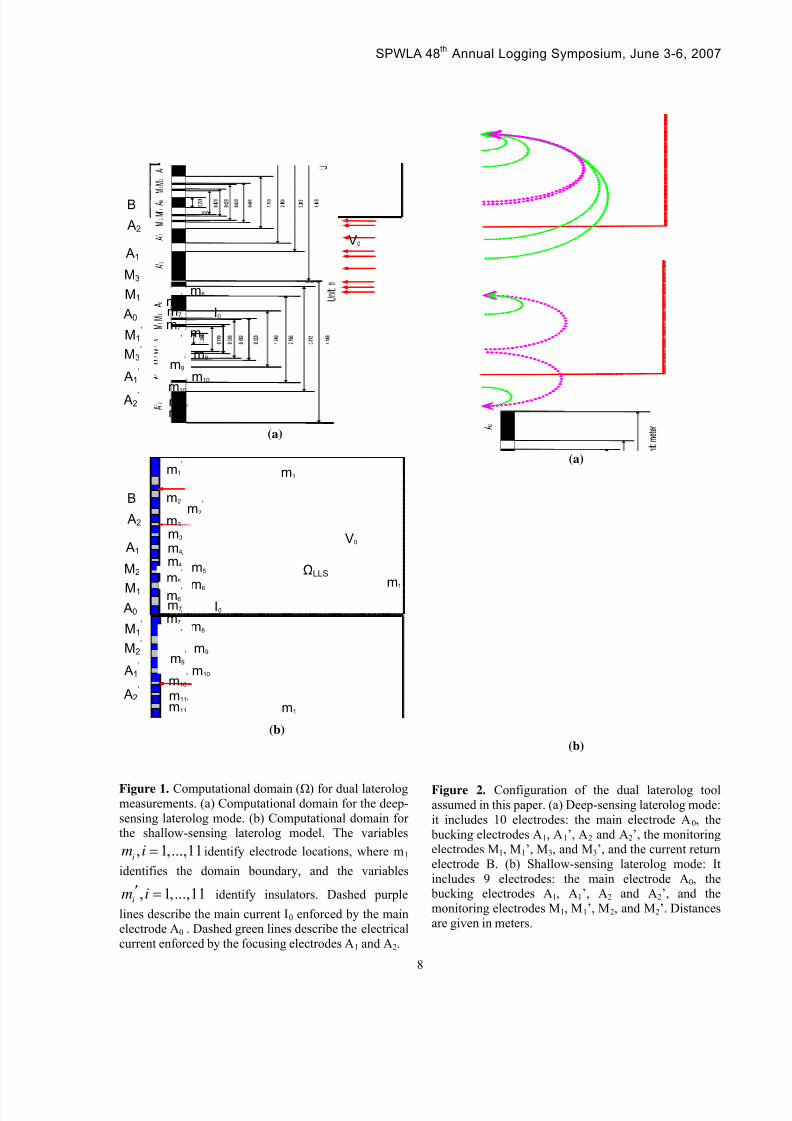
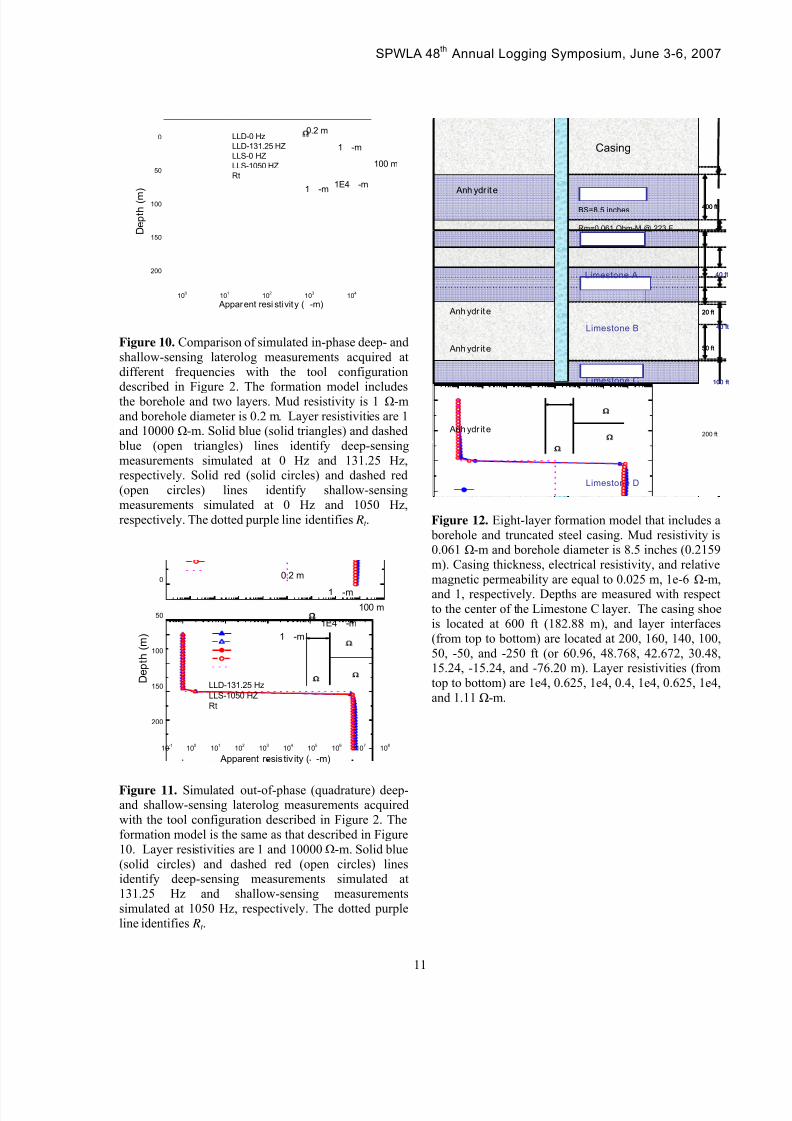
Effect of Non-Zero Probing Frequencies. Figure 10compares simulated in-phase laterolog measurements
for both deep- and shallow-sensing modes at twooperating frequencies. The formation model includes a
borehole and two layers. Mud resistivity is 1 Ω-m and
borehole diameter is 0.2 m. Layer resistivities are 1 and10000 Ω-m. Solid blue (solid triangles) and dashed blue
(open triangles) lines identify deep-sensing
measurements simulated at 0 Hz and 131.25 Hz,respectively. Solid red (solid circles) and dashed red
(open circles) lines identify shallow-sensing
measurements simulated at 0 Hz and 1050 Hz,
respectively. The dotted purple line identifies Rt.Simulations indicate that frequency has no appreciable
effect on laterolog measurements. Figure 11 shows the
simulated out-of-phase (quadrature) laterolog
measurements for both deep- and shallow-sensingmodes at different frequencies. The corresponding
formation model is the same as that shown in Figure 10.
Solid blue (solid circles) and dashed red (open circles)lines identify deep-sensing measurements simulated at
131.25 Hz and shallow-sensing measurements
simulated at 1050 Hz, respectively. The dotted purple
line identifies Rt. Simulations indicate that out-of-phase
laterolog measurements exhibit a similar behavior tothat of the in-phase measurements. However, we note
that the simulated out-of-phase apparent resistivities
require a different normalization constant to that of the
in-phase measurements to properly reproduce the actual
layer resistivities when the resistivity contrast is high.
Multiple Layers in the Presence of Steel Casing. Figure 12 shows an eight-layer model that includes
steel casing. The origin of coordinates is assumed
located at the center of the Limestone C layer, with the
casing shoe located at 600 ft (183 m). Mud resistivity is0.061 Ω-m and borehole diameter is equal to 8.5 inches
(0.2159 m). Casing resistivity, relative magnetic
permeability, and thickness are equal to 1e-6 Ω-m, 1,
and 0.025 m, respectively. Layer interfaces from top to
Page 6
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 6/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
6
bottom are located at 200, 160, 140, 100, 50, -50, and -
250 ft (or 61, 48.8, 42.7, 30.5, 15.25, -15.25, and -76.25m), respectively. Formation resistivities from top to
bottom are 1e4, 0.625, 1e4, 0.4, 1e4, 0.625, 1e4, and
1.11 Ω-m, respectively. This model was constructed
based on typical Middle East carbonate reservoirs withalternating layers of anhydrite and porous limestone.
The objective of the simulations is to ascertain whether
laterolog apparent resistivities are indicative of actual
resistivities across porous and permeable limestone
layers because of the concomitant presence of anhydritelayers (high electrical resistivity) and steel casing (low
electrical resistivity).
Figures 13 shows the simulated laterolog measurements
at DC for the formation model described in Figure 12.
Figures 14 and 15 show the corresponding simulated in- phase and out-of-phase apparent resistivities,
respectively. Simulations indicate that measurementsacross the various layers are, in general, consistent with
true formation resistivities. However, we note that
apparent resistivities across low-resistivity layers(corresponding to porous and permeable limestone
formations) are slightly different from the
corresponding layer resistivities. The difference between actual layer resistivities and in-phase apparent
resistivities across limestone formations depends on
both frequency and layer thickness. Moreover, we
observe that the simulated deep- and shallow-sensinglaterolog apparent resistivities do not overlap across
low-resistivity limestone layers, thereby opening the
possibility of erroneous interpretations about the
presence and radial extent of mud-filtrate invasion. Asexpected, frequency has a marked effect on the
simulated apparent resistivities across steel casing. The
simulated out-of-phase apparent resistivities aresubstantially different from actual layer resistivities,
possibly due to the fact that the normalizing
geometrical constant should be corrected for frequency.
We also observe anomalous “horns” in the simulated
out-of-phase apparent resistivities across the upperinterfaces of low-resistivity limestone layers.
Figures 16 through 18 show the results of an additional
sensitivity study performed to assess the combined
influence of steel casing and shouldering anhydrite bedson the diagnosis and quantification of invasion. For this
study, invasion was included only in the porous and permeable limestone layers with a single piston-like
invasion front of radial length equal to 1 ft and with
invaded-zone resistivity (Rxo) equal to 0.5 times the
corresponding value of true (uninvaded) formation
resistivity. Comparison of Figures 14 and 16 indicatesthat the effect of casing on the simulated in-phase
apparent resistivities remains only within 100 m of the
casing shoe and does not affect measurements acquired
across porous and permeable limestone layers.
Comparison of Figures 14 through 17 indicates that thesimulated in-phase apparent resistivities remain
sensitive to the presence of invasion regardless of the
presence of both casing and shouldering anhydrite beds.
In particular, the simulated shallow-sensing apparentresistivities exhibit an almost linear sensitivity to the
corresponding perturbation of invaded-zone resistivity
regardless of the presence of both casing and anhydrite
shouldering beds.
CONCLUSIONS
We have formulated, implemented, and successfully
tested a new second-order finite-elemnt method to
simulate axially-symmetric laterolog measurements
based on the variational formulation of the frequency-dependent current potential. Benchmarking exercises
confirmed the reliability and accuracy of the simulationmethod in the presence of large contrasts of electrical
resistivity, electrical anisotropy, and invasion. Specific
simulations conducted for the case of HalliburtonEnergy Services’ Dual Laterolog Logging Tool (DLLT-
BTM) configuration indicate that the placement of the
return current electrode, N, at infinity has a negligibleeffect on non-zero frequency measurements. We found
that steel casing has a significant effect on shallow- and
deep-sensing laterolog measurements. The effect of
steel casing on both in-phase and out-phase laterologmeasurements depends on the specific value of
frequency. Moreover, simulations indicate that the
effect of steel casing remains confined to the spatial
neighborhood of casing (within 100 m) with marginaleffect on apparent resistivities measured tens of feet
away from the casing shoe, even in the extreme case of
presence of highly resistive layers of anhydrite. Oursimulations indicate measurable differences between
true layer resistivities and laterolog apparent
resistivities across porous and permeable limestone
layers shouldered by anhydrite beds. Simulations also
revealed separation between shallow- and deep-sensinglaterolog measurements across porous and permeable
limestone layers shouldered by anhydrite beds that
could give a false indication of invasion. In cases of
significant variations of layer resistivities, the work
presented in this paper suggests that the petrophysicalinterpretation of laterolog apparent resistivities should
be guided by numerical simulation.
ACKNOWLEDGEMENTS
The work reported in this paper was funded byUniversity of Texas at Austin Research Consortium on
Formation Evaluation, jointly sponsored by Anadarko,
Aramco, Baker Atlas, BP, British Gas, ConocoPhilips,
Chevron, ENI E&P, ExxonMobil, Halliburton Energy
Page 7
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 7/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
7
Services, Hydro, Marathon Oil Corporation, Mexican
Institute for Petroleum, Occidental PetroleumCorporation, Petrobras, Schlumberger, Shell
International E&P, Statoil, TOTAL, and Weatherford.
REFERENCES
Anderson, B. I., 2001, Modeling and inversion methods
for the interpretation of resistivity logging tool
response: PhD Thesis, Delft University of
Technology.Chen Y. H., Chew W. C. and Zhang G. J., 1998, A
novel array laterolog method: The Log Analyst, v.39, no. 5, pp. 23-33.
Jin J. M., M. Zunoubi, K. C. Donepudi, and W. C.
Chew, 1999, Frequency-domain and time-domain
finite-element solution of Maxwell’s equationsusing the spectral Lanczos decomposition method:
Computer Methods in Applied Mechanics andEngineering, v. 169, no. 1999, pp. 279-296.
Lacour-Gayet, P., 1981, The Groningen effect, causes
and a partial remedy: Schlumberger TechnicalReview, v. 29, no. 1, pp. 37-47.
Li, T. T., and Tan, Y.J., 1995, Mathematical problems
and methods in resistivity well-logging: SurveysMath. Industry, v. 5, pp 133-167.
Liu, Q. H., Anderson, B., and Chew, W.C., 1994,
Modeling low-frequency electrode-type resistivity
tools in invaded thin beds: IEEE Transactions onGeoscience and Remote Sensing, v. 32, no. 3.
Lovell, J. R., 1993, Finite element methods in
resistivity logging: PhD Thesis, Delft University of
Technology.Trouiller J. C., and Dubourg I., 1978, A better deep
laterolog compensated for Groningen and reference
effects: in Transactions of the 35th SPLWASymposium, pp. 1-16, Paper VV.
Woodehouse, R., 1978, The laterolog Groningen
phantom can cost you money: in Transactions of
the 19th SPLWA Symposium, pp. 1-17, Paper R.
Yang F., and Nie Z. P., 1997, A precise numericalsimulation of DLL logging response: Chinese Well
Logging Technology, v. 21, no. 4.
Zhang, G. J., 1986, Electrical well logging (II) (in
Chinese): The Petroleum Industry Press, Beijing.
ABOUT THE AUTHORS
Wei Yang received a Ph.D. degree in GeneralMechanics from Harbin Institute of Technology, China,
in 1995. During 1995-1997 he was a postdoctoral
researcher at the University of Petroleum, Beijing,China. During 1997-2005, he held the position of
Associate Professor with the Borehole Research Center
of the same university. From 2005 to 2006, he was a
Research Fellow with the Department of Petroleum and
Geosystems Engineering of The University of Texas at
Austin. Since December 2006, he has been withWesternGeco Electromagnetics of Schlumberger as
Senior Research Scientist. He conducts research on
marine CSEM and MT. He published over 30 papers
and holds a Chinese patent.
Carlos Torres-Verdín received a Ph.D. degree in
Engineering Geoscience from the University ofCalifornia, Berkeley, in 1991. During 1991–1997 he
held the position of Research Scientist with
Schlumberger-Doll Research. From 1997–1999, he wasReservoir Specialist and Technology Champion with
YPF (Buenos Aires, Argentina). Since 1999, he has
been with the Department of Petroleum andGeosystems Engineering of The University of Texas at
Austin, where he currently holds the position of
Associate Professor. He conducts research on borehole
geophysics, well logging, formation evaluation, andintegrated reservoir characterization. Torres-Verdín has
served as Guest Editor for Radio Science, and iscurrently a member of the Editorial Board of the
Journal of Electromagnetic Waves and Applications,
and an associate editor for Petrophysics (SPWLA) and
the SPE Journal. He is co-recipient of the 2003 and2004 Best Paper Award by Petrophysics, and is
recipient of SPWLA’s 2006 Distinguished TechnicalAchievement Award.
Ridvan Akkurt is a Petroleum Engineering Consultant
at Aramco. Ridvan started his oilfield career in 1983 inAfrica as a wireline field engineer for Schlumberger,
then worked for GSI in the Middle East as a fieldseismologist, for Schlumberger-Doll Research on NMR
research, for Shell as a geophysicist, and for NUMAR
as a senior research scientist. He founded NMRPLUS
in late 1997, and consulted for major oil and servicecompanies on various aspects of NMR logging until
joining Aramco in 2005. Ridvan has a B.Sc. degree inElectrical Engineering from the Massachusetts Institute
of Technology and a Ph.D. degree in Geophysics from
the Colorado School of Mines. He has several
publications and patents in the area of NMR logging, isrecipient of best paper award by SPWLA in 1995,
teaches industrial courses on NMR logging, and has
served as a Distinguished Lecturer for SPE during1998-1999, and for SPWLA during 1995-1996.
Haluk Ersoz is a Technical Advisor for Halliburton
Saudi Arabia. He holds a M.Sc. degree in NuclearPhysics and a B.Sc. degree in Mechanical Engineering
from University of Manchester, U.K. He has over 20
years experience in log interpretation and formationevaluation with Schlumberger and Halliburton as field
engineer, field service coordinator, field service quality
coordinator and technical advisor.
Page 8
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 8/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
8
(a)
(b)
Figure 1. Computational domain (Ω) for dual laterologmeasurements. (a) Computational domain for the deep-
sensing laterolog mode. (b) Computational domain forthe shallow-sensing laterolog model. The variables
, 1,...,11i
m i = identify electrode locations, where m1
identifies the domain boundary, and the variables
, 1,...,11im i′ = identify insulators. Dashed purple
lines describe the main current I0 enforced by the mainelectrode A0 . Dashed green lines describe the electrical
current enforced by the focusing electrodes A1 and A2.
(a)
(b)
Figure 2. Configuration of the dual laterolog toolassumed in this paper. (a) Deep-sensing laterolog mode:
it includes 10 electrodes: the main electrode A0, the
bucking electrodes A1, A1’, A2 and A2’, the monitoringelectrodes M1, M1’, M3, and M3’, and the current return
electrode B. (b) Shallow-sensing laterolog mode: It
includes 9 electrodes: the main electrode A0, the bucking electrodes A1, A1’, A2 and A2’, and the
monitoring electrodes M1, M1’, M2, and M2’. Distances
are given in meters.
m1
B
A2
A1
M3
M1
A0
A1’
A2’
M1’
M3’
m1
m1
m1
’
m2 m2
’
m3
m3
’
m4
m4
’ m5
m5
’
m6
m6
’
m7
m7
’
m8
m8
’
m9
m9
’ m10
m10
’
m11
m11
’
ΩLLD
V0
I0
vvv
m1
B
A2
A1
M2
M1 A0
A1’
A2’
M1’
M2’
m1
m1
m1
’
m2 m2
’
m3
m3
’
m4
m4
’ m5
m5
’
m6 m6’
m7
m7
’
m8
m8
’
m9
m9
’ m10
m10
’
m11
m11
’
ΩLLS
V0
I0
Page 9
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 9/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
9
Figure 3. Description of the 8-node quadrilateral
element used in the second-order finite-elementformulation.
2
1
0
-1
-2
1 10 100
1 -m
2 m50 -m10 -m0.2m
1 -m
1 -m0.2m
Apparent Resist ivi ty ( -m)
D e p t h ( m )
FIRST ORDER-LLD
SECOND ORDER-LLD
FIRST ORDER-LLS
SECOND ORDER-LLS
Rt
Figure 4. Comparison of first- and second-order finite-
element solutions. Figure 2 shows the assumedlaterolog tool configuration operating at 0 Hz. The
formation model includes three layers with a borehole.Mud resistivity is 1 Ω-m and borehole diameter is 0.2m
One of the layers is invaded. Layer resistivities are 1,
50, and 1 Ω-m, with the resistivity of the invasion zone
in the invaded layer equal to 10 Ω-m (thickness equal to2 m and radial length of invasion equal to 0.2 m). Solid
blue (solid triangles) and dashed blue (open triangles)
lines identify deep laterolog measurements simulated
with the first- and second-order finite-element methods,
respectively. Solid red (solid circles) and dashed red(open circles) lines identify shallow laterolog
measurements simulated with the first- and second-
order finite-element methods, respectively. The dotted purple line identifies Rt .
Figure 5. Single-interface formation model with
borehole and steel casing. Mud resistivity is 1Ω
-m and borehole diameter is 0.2 m. Layer resistivities are 1 and
10000 Ω-m, with their interface located at the relativevertical location of -1 m. Casing thickness, electrical
resistivity, and relative magnetic permeability are equal
to 0.01 m, 2e-7 Ω-m, and 1, respectively. The lower
termination boundary of casing is located at a the
relative vertical location of 1 m and the spatial domainof the simulation is terminated at the relative vertical
location of 1000 m.
-2
-1
0
1
2
10-3
10-2
10-1
100
101
102
103
104
105
Apparent Resist ivit y ( -m)
D e p t h ( m )
FIRST ORDER-LLD
SECOND ORDER-LLD
FIRST ORDER-LLS
SECOND ORDER-LLS Rt
Figure 6. Comparison of first- and second-order finite-element solutions for the formation model described inFigure 5. Figure 2 shows the assumed laterolog tool
configuration operating at 0 Hz. Solid blue (solid
triangles) and dashed blue (open triangles) linesidentify deep laterolog measurements simulated with
the first- and second-order finite-element methods,
respectively. Solid red (solid circles) and dashed red
(open circles) lines identify shallow laterologmeasurements simulated with the first- and second-
order finite-element methods, respectively. The dotted
purple line identifies Rt .
Page 10
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 10/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
10
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Radial Coordinate (m)
V e r t i c a l C o o r d i n a t e (
m )
Figure 7. Spatial distribution of electric current lines
for deep-sensing laterolog measurements simulated
across isotropic and anisotropic homogeneousformations. The horizontal and vertical resistivities of
the formation are 1 Ω-m and 2 Ω-m, respectively. Thick
solid lines and thin dashed lines identify electric current
lines for the cases of isotropic and anisotropichomogeneous formations, respectively.
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Radial Coordinate (m)
V e r t i c a l C o o r
d i n a t e ( m )
Figure 8. Spatial distribution of electric current lines
for shallow-sensing laterolog measurements simulatedacross isotropic and anisotropic homogeneous
formations. The horizontal and vertical resistivities of
the formation are 1 Ω-m and 2 Ω-m, respectively. Thicksolid lines and thin dashed lines identify electric current
lines for the cases of isotropic and anisotropic
homogeneous formations, respectively.
2
1
0
-1
-2
1 10
1 -m
0.2m
2m10 -m
1 -m 1 -m
Apparent Resistivity ( -m)
D e p t h ( m )
LLD_Iso
LLS_Iso
Rt
(a)
2
1
0
-1
-2
1 10 100
Rh=10,Rv=100 -m
Rh=1,Rv=10 -m1 -m
0.2m
2m
Rh=1,Rv=10 -m
Apparent Resisti vity ( -m)
D e p t h ( m )
LLD_Ani
LLS_Ani
Rh
Rv
(b)
Figure 9. Simulation of dual laterolog measurements in(a) isotropic and (b) anisotropic inhomogeneous
formations. The formation model consists of three
layers (thickness of center layer is 2 m) and includes a
borehole. Mud resistivity is 1 Ω-m and borehole
diameter is 0.2 m. For the isotropic case, layerresistivities are 1, 10, and 1 Ω-m, whereas for the
anisotropic case, vertical resistivities in the three layers
are 10, 100, and 10 Ω-m, respectively. Figure 2 showsthe assumed tool configuration; the operating frequency
is 0 Hz. Solid blue (solid triangles) and red (solid
circles) lines identify deep and shallow laterologmeasurements, respectively, simulated for the isotropic
case. Dashed blue (open triangles) and red (open
circles) lines identify deep and shallow laterolog
measurements, respectively, simulated for the
anisotropic case. The dotted purple and dashed cyan
lines identify the horizontal ( Rh) and vertical
resistivities ( Rv), respectively.
Page 11
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 11/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
11
200
150
100
50
0
100
101
102
103
104
Apparent resi stivity ( -m)
0.2 m
1 -m
100 m
1E4 -m
1 -m
D e p t h ( m
)
LLD-0 Hz
LLD-131.25 HZ
LLS-0 HZ
LLS-1050 HZ
Rt
Figure 10. Comparison of simulated in-phase deep- and
shallow-sensing laterolog measurements acquired at
different frequencies with the tool configuration
described in Figure 2. The formation model includesthe borehole and two layers. Mud resistivity is 1 Ω-m
and borehole diameter is 0.2 m. Layer resistivities are 1and 10000 Ω-m. Solid blue (solid triangles) and dashed
blue (open triangles) lines identify deep-sensing
measurements simulated at 0 Hz and 131.25 Hz,respectively. Solid red (solid circles) and dashed red
(open circles) lines identify shallow-sensing
measurements simulated at 0 Hz and 1050 Hz,
respectively. The dotted purple line identifies Rt .
200
150
100
50
0
10-1
100
101
102
103
104
105
106
107
108
Apparent resis tiv ity ( -m)
1 -m
1 -m
0.2 m
100 m
1E4 -m
D e p t h ( m )
LLD-131.25 Hz
LLS-1050 HZ
Rt
Figure 11. Simulated out-of-phase (quadrature) deep-and shallow-sensing laterolog measurements acquired
with the tool configuration described in Figure 2. The
formation model is the same as that described in Figure
10. Layer resistivities are 1 and 10000Ω-m. Solid blue
(solid circles) and dashed red (open circles) linesidentify deep-sensing measurements simulated at
131.25 Hz and shallow-sensing measurements
simulated at 1050 Hz, respectively. The dotted purple
line identifies Rt .
Figure 12. Eight-layer formation model that includes a
borehole and truncated steel casing. Mud resistivity is0.061 Ω-m and borehole diameter is 8.5 inches (0.2159
m). Casing thickness, electrical resistivity, and relative
magnetic permeability are equal to 0.025 m, 1e-6 Ω-m,
and 1, respectively. Depths are measured with respectto the center of the Limestone C layer. The casing shoe
is located at 600 ft (182.88 m), and layer interfaces
(from top to bottom) are located at 200, 160, 140, 100,
50, -50, and -250 ft (or 60.96, 48.768, 42.672, 30.48,15.24, -15.24, and -76.20 m). Layer resistivities (from
top to bottom) are 1e4, 0.625, 1e4, 0.4, 1e4, 0.625, 1e4,
and 1.11 Ω-m.
Limestone A
Anh ydr it e
400 ft
Limestone B
Limestone C
Limestone D
Anh ydr ite
Anh ydr ite
Anh ydr ite
40 ft
20 ft
40 ft
50 ft
100 ft
200 ft
BS=8.5 inches
Rm=0.061 Ohm-M @ 223 F
Casing
Limestone A
Anh ydr it e
400 ft
Limestone B
Limestone C
Limestone D
Anh ydr ite
Anh ydr ite
Anh ydr ite
40 ft
20 ft
40 ft
50 ft
100 ft
200 ft
BS=8.5 inches
Rm=0.061 Ohm-M @ 223 F
Casing
Page 12
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 12/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
12
-100
-50
0
50
100
150
200
10-1
100
101
102
103
104
Resistivity ( -m)
D e p t h ( m
)
Rt LLD-0 Hz
LLS-0 Hz
Figure 13. Deep- and shallow-sensing laterolog
measurements simulated at DC for the formation modelshown in Figure 12 and with the tool configuration
described in Figure 2. The solid black line identifiesvalues of true (uninvaded) formation resistivity. Solid
blue (solid circles) and dashed red (open circles) lines
identify the simulated deep- and shallow-sensingsensing laterolog measurements, respectively.
-100
-50
0
50
100
150
200
10-1
100
101
102
103
104
Resistivity ( -m)
D e p t h ( m
)
Rt LLD-131.25 Hz
LLS-1050 Hz
Figure 14. In-phase apparent resistivities of deep- and
shallow-sensing laterolog measurements simulated for
the formation model shown in Figure 12 with the toolconfiguration described in Figure 2. The solid black
line identifies values of true (uninvaded) formationresistivity. Solid blue (solid circles) and dashed red
(open circles) lines identify the simulated deep- (131.25
Hz) and shallow-sensing (1050 Hz) laterologmeasurements.
-100
-50
0
50
100
150
200
10-2
10-1
100
101
102
103
104
105
106
107
108
Resistivi ty ( -m)
D e p t h ( m
)
Rt
LLD-131.25 Hz
LLS-1050 Hz
Figure 15. Out-of-phase apparent resistivities of deep-
and shallow-sensing laterolog measurements simulated
for the formation model shown in Figure 12 with thetool configuration described in Figure 2. The solid
black line identifies values of true (uninvaded)
formation resistivity. Solid blue (solid circles) anddashed red (open circles) lines identify the simulated
deep- (131.25 Hz) and shallow-sensing (1050 Hz)
laterolog measurements.
-100
-50
0
50
100
150
200
10-1
100
101
102
103
104
Resistivi ty ( -m)
D e p t h ( m
)
Rt LLD-131.25 Hz
LLS-1050 Hz
Figure 16. In-phase apparent resistivities of deep- and
shallow-sensing laterolog measurements simulated for
the formation model shown in Figure 12 with the tool
configuration described in Figure 2. Casing was notincluded in the simulations. The solid black line
identifies values of true (uninvaded) formation
resistivity. Solid blue (solid circles) and dashed red(open circles) lines identify the simulated deep- (131.25
Hz) and shallow-sensing (1050 Hz) laterolog
measurements (cf. Figs. 14, 17, and 18).
Page 13
8/13/2019 Wei_paper for Petrophysic
http://slidepdf.com/reader/full/weipaper-for-petrophysic 13/13
SPWLA 48th
Annual Logging Symposium, June 3-6, 2007
13
-100
-50
0
50
100
150
200
10-1
100
101
102
103
104
Resistivity ( -m)
D e p t h ( m
)
Rt
LLD-131.25 Hz
LLS-1050 Hz
Figure 17. In-phase apparent resistivities of deep- and
shallow-sensing laterolog measurements simulated for
the formation model shown in Figure 12 with the toolconfiguration described in Figure 2. Casing was not
included in the simulations whereas invasion was only
included in the low-resistivity limestone beds ( R xo = Rt /2 and radial length of invasion equal to 1 ft). The solid
black line identifies values of true (uninvaded)
formation resistivity. Solid blue (solid circles) and
dashed red (open circles) lines identify the simulated
deep- (131.25 Hz) and shallow-sensing (1050 Hz)laterolog measurements (cf. Figs. 14, 16, and 18).
-100
-50
0
50
100
150
200
10-1
100
101
102
103
104
Resistivity ( -m)
D e p t h ( m
)
Rt
LLD-131.25 Hz
LLS-1050 Hz
Figure 18. In-phase apparent resistivities of deep- and
shallow-sensing laterolog measurements simulated for
the formation model shown in Figure 12 with the toolconfiguration described in Figure 2. Both casing and
invasion were included in the simulations. Invasion was
only included in the low-resistivity limestone beds
( R xo= Rt /2 and radial length of invasion equal to 1 ft).The solid black line identifies values of true
(uninvaded) formation resistivity. Solid blue (solid
circles) and dashed red (open circles) lines identify thesimulated deep- (131.25 Hz) and shallow-sensing (1050
Hz) laterolog measurements (cf. Figs. 14, 16, and 17).