11
Xueyu(Sherry) Du Mechanical and Aerospace Engineering University of Florida 4/10/2014 ZENITH: A ROBOT THAT CAN AUTOMATICALLY CLIMB UP THE STAIRS
| Date post: | 28-Dec-2015 |
| Category: |
Documents |
| Upload: | janel-morton |
| View: | 217 times |
| Download: | 0 times |

Xueyu(Sherry) Du
Mechanical and Aerospace EngineeringUniversity of Florida
4/10/2014
ZENITH: A ROBOT THAT CAN AUTOMATICALLY CLIMB UP THE STAIRS

1Introduction
2Project goal
& Tasks
3System
Implementation
Contents
4Current Progress
5Conclusion

Introduction1
UNFIT FOR
HUMAN
Toxic Substanc
e
Explosive
Decrepit House
HistoricalSites
Battlefield
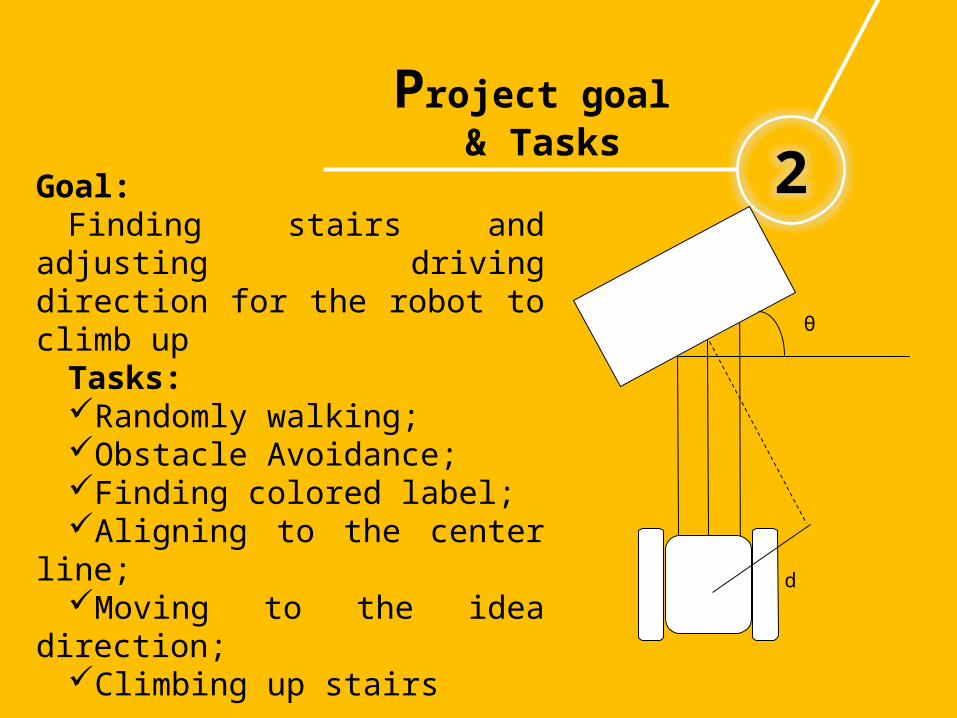
Project goal & Tasks
2
θ
Goal: Finding stairs and adjusting
driving direction for the robot to climb up
Tasks: Randomly walking;Obstacle Avoidance;Finding colored label;Aligning to the center line;Moving to the idea
direction;Climbing up stairs
d
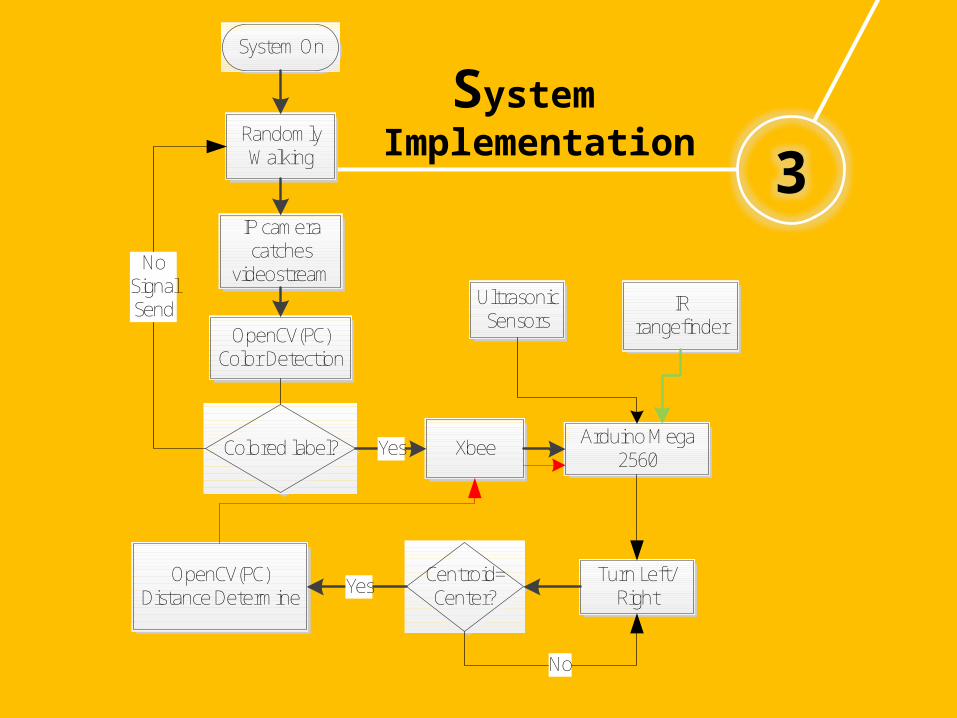
System Implementation
3
System On
Randomly Walking
IP camera catches
videostream
OpenCV(PC)Color Detection
Colored label? Xbee Arduino Mega 2560
Turn Left/ Right
Centroid=Center?
OpenCV(PC)Distance Determine
Yes
Yes
Ultrasonic Sensors
IR rangefinder
NoSignalSend
No

IP Wireless Camera
Ultrasonic Sensors
IR Rangefinder
Arduino Mega 2560
XBee Series 2 Laptop
Motor Controller DC motor
Tracks
System:Components

Programming:Image
Processing
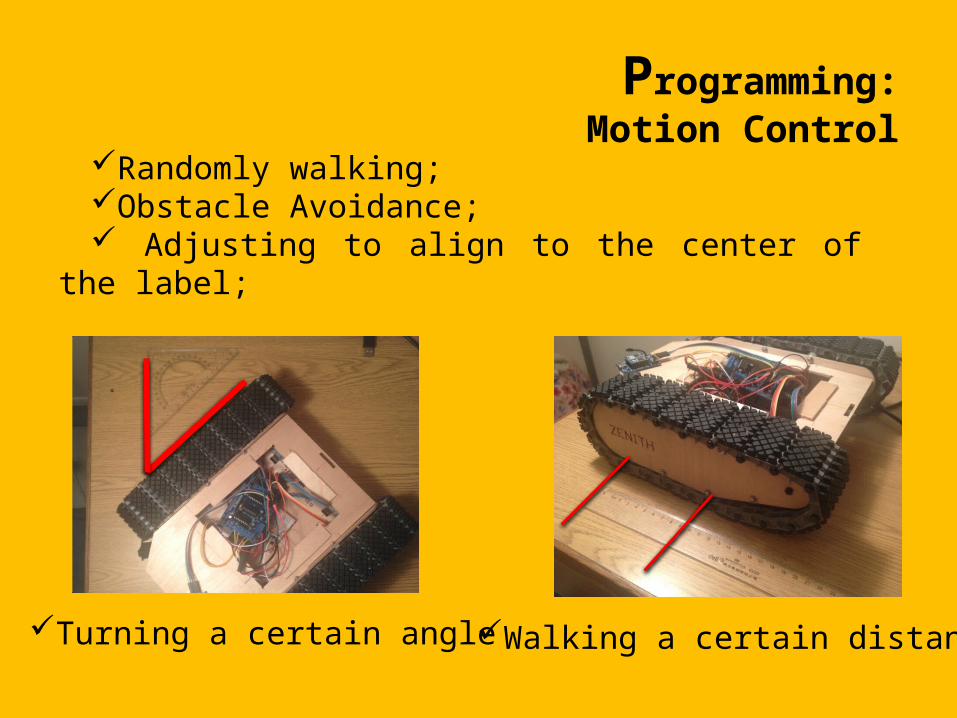
Programming:Motion Control
Randomly walking;Obstacle Avoidance; Adjusting to align to the center of the label;
Turning a certain angle Walking a certain distance

4Current Progress
Frame of trends fully designed & assembled;Chassis fully designed & assembled;Obstacle avoidance achieved;Color detection & tracking centroidXBee communicationMotion control achieved

5Conclusio
n
Current status: 80% complicated;
Major problems: sensor errors;
Future development: accuracy controlling

Question?

















