50
ŽILINSKÁ UNIVERZITA V ŽILINE STROJNÍCKA FAKULTA KATEDRA AUTOMATIZÁCIE A VÝROBNÝCH SYSTÉMOV DIPLOMOVÁ PRÁCA PRAT – 135 -2009 ONDREJ TABÁK

ŽILINSKÁ UNIVERZITA V ŽILINE
STROJNÍCKA FAKULTA
KATEDRA AUTOMATIZÁCIE A VÝROBNÝCH SYSTÉMOV
DIPLOMOVÁ PRÁCA
PRAT – 135 -2009 ONDREJ TABÁK

ŢILINSKÁ UNIVERZITA V ŢILINE
STROJNÍCKA FAKULTA
KATEDRA AUTOMATIZÁCIE A VÝROBNÝCH SYSTÉMOV
DIPLOMOVÁ PRÁCA
PRAT – 135 - 2009
ONDREJ TABÁK

Fakulta: Strojnícka
Katedra: KAVS - PRAT
Vedúci DP: Doc. Ing. Fedor KÁLLAY, PhD.
Diplomová práca za rok: 2009
1. Meno a priezvisko: Ondrej TABÁK
2. Názov práce: Návrh riadenia modelu vežového žeriavu
3. Počet strán: 46 Počet obrázkov: 28 Počet tabuliek: 2
Počet grafov: 0 Počet príloh: 5 Počet použ.lit.: 18
4. Heslá (kľúčové slová):
Model žeriavu,
mačka,
kyvadlo,
ovládanie,
regulácia,
PLC
5. Anotácia:
V diplomovej práci je riešená téma ovládania modelu žeriavu a regulácia
kmitov jeho bremena.
6. Resume:
The topic of our diploma work is the operation of a jib model and the
adjusting of its load frequency.


Miestoprísažné prehlásenie
„Miestoprísaţne prehlasujem, ţe som celú diplomovú prácu vypracoval/a
samostatne s pouţitím uvedenej odbornej literatúry.“
Ţilina, 19.5.2009 ..........................................
vlastnoručný podpis

Poďakovanie
Týmto by som sa chcel poďakovať vedúcemu diplomovej práce pánovi
Doc. Ing. Fedorovi KÁLLAYOVI, PhD a Ing. Marekovi PAŠKALOVI za ochotný
prístup, konzultácie a cenné rady či usmernenia pri písaní tejto diplomovej práce.
Tieţ ďakujem všetkým, ktorí mi verili, pomáhali a posúvali ma vpred, rodičom
a priateľom, no najme Katke, ktorá stále stála pri mne a podporovala ma.

OBSAH
Zoznam symbolov a skratiek ......................................................................................... 5
Úvod ................................................................................................................................. 6
1 FORMULÁCIA ÚLOHY ......................................................................................... 7
2 ŽERIAVY .................................................................................................................. 8
2.1 ROZDELENIE ŢERIAVOV ................................................................................. 8
2.1.1 Mostové ţeriavy ............................................................................................. 8
2.1.2 Portálové ţeriavy ........................................................................................... 9
2.1.3 Mobilné ţeriavy ............................................................................................. 9
2.1.4 Veţové ţeriavy ............................................................................................. 10
3 KYVADLO: ............................................................................................................. 13
4 SNÍMAČE ................................................................................................................ 15
4.1 ČLEN PRE ZBER INFORMÁCIÍ ...................................................................... 15
4.2 OPTOELEKTRONICKÉ SNÍMAČE: ................................................................ 17
4.3 JEDNOTLIVÉ ZDROJE ŢIARENÍ: ................................................................... 19
4.3.1 Ţiarovky a výbojky ...................................................................................... 19
4.3.2 Luminiscenčné kondenzátory ...................................................................... 19
4.3.3 Elektroluminiscenčné diódy ......................................................................... 19
4.3.4 Polovodičové laserové diódy ....................................................................... 20
5 REGULÁCIA, REGULÁTORY ............................................................................ 21
5.1 REGULÁCIA: ..................................................................................................... 21
6 PLC ........................................................................................................................... 24
6.1 Micrologix ........................................................................................................... 24
6.2 SLC 500 ............................................................................................................... 25
7 PROGRAMOVACÍ SOFTWARE ........................................................................ 26
7.1 Rebríkové diagramy (Ladder diagrams) .............................................................. 26
7.2 RSLinx ................................................................................................................. 27
7.3 RSLogix 500 ........................................................................................................ 27
7.3.1 Organizácia súborov .................................................................................... 28
7.3.2 Programovanie v RS Logix .......................................................................... 29

7.3.3 Nahrávanie programu do PLC ..................................................................... 29
7.4 RS VIEW 32 ........................................................................................................ 30
8 PRIPOJENIE A OVLÁDANIE MODELU CEZ PC ........................................... 33
8.1 PRIPOJENIE MODELU K CUDZIEMU ZDROJU ........................................... 33
8.2 PREPOJENIE MODELU ŢERIAVU A PLC ..................................................... 34
8.3 OVLÁDANIE A SIGNALIZÁCIA POSUVU MAČKY .................................... 38
8.3.1 Ovládanie posuvu mačky ............................................................................. 38
8.3.2 Ovládanie rotácie ţeriavu ............................................................................ 39
8.3.3 Ovládanie navíjania (odvíjania) háku .......................................................... 40
9 REGULÁCIA KMITOV BREMENA ŽERIAVU ............................................... 42
Záver .............................................................................................................................. 46

SjF KAVS - PRAT
- 5 -
Zoznam symbolov a skratiek
konšt. = konštanta
LED = Light emition diode – elektroluminiscenčná dióda
PLC = Programmable logic controller
RS = Rockwell Software

SjF KAVS - PRAT
- 6 -
Úvod
V tejto modernej dobe je hlavne v stavebníctve veľký „boom“. Stavia sa od malých
domčekov cez priemyselné stavby aţ po výškové budovy všetko a pri takmer kaţdej
stavbe je pouţitý ţeriav, či uţ malý, jednoduchý mobilný ţeriav, alebo vysoký
veţový ţeriav s obrovskou nosnosťou.
Táto diplomová práca rieši základnú činnosť ţeriavu, teda presun materiálu a tieţ
jeho obsluhu a tieţ reguláciu kmitov bremena ţeriavu. O aktuálnosti tejto témy
svedčia nemalé finančné balíky, ktoré sa pravidelne vkladajú do výskumu nových
spôsobov a technológií.
Cieľom tejto práce je z modelu ţeriava spraviť školskú pomôcku, na ktorej budú
môcť študenti zoznamujúci sa s programovacím softvérom RS naučiť sa nie len
základy programovania, ale aj riešenia ovládania jednoduchého modelu. Tieţ je
v tejto práci z časti riešená problematika kmitania bremena ţeriavu.
Diplomová práca sa preto bude skladať z viacerých tém, ako napríklad teoretický
rozbor a terminológia ţeriavov, fyzikálny rozbor kmitov bremena ţeriavu, rozbor
snímačov či regulácie, podrobnejší opis programovacích jazykov firmy Rockwell
Software aţ po samotné riešenie problematiky.

SjF KAVS - PRAT
- 7 -
1 FORMULÁCIA ÚLOHY
Problematika riadenia ţeriavu je veľmi obšírna a hlavne náročná najmä na presnosť,
snímanie hodnôt, ako napr. poloha mačky, bremena, rýchlosti posuvu, uhlovej
rýchlosti a pod.
V rámci zjednodušenia je táto práca zostavená ako ovládanie školského modelu, teda
nároky na obsluhu nie sú tak vysoké. Predpokladá sa, ţe študent, ako obsluhujúci
pracovník bude riadiť tento model v rámci vyučovania a pri ovládaní bude naň
vidieť, podľa toho sa bude riadiť a následne vydávať príkazy na jeho obsluhu.
V prípade riešenia problému kmitania bremena budeme pre zjednodušenie brať do
úvahy len rovinnú, teda dvojosovú časť a teda nie celý cylindrický priestor, ktorý
dokáţe ţeriav obslúţiť.

SjF KAVS - PRAT
- 8 -
2 ŽERIAVY
Pre manipuláciu so všetkými druhmi materiálu od kusových cez tyčové aţ po sypké
sa často vyuţíva ţeriav. Pohybové schopnosti ţeriavov dovoľujú sa pohybovať
bremenom podľa konštrukcie ţeriavov po priamke, v rovine aj v priestore.
2.1 ROZDELENIE ŽERIAVOV
Ţeriavy delíme podľa ich základných charakteristík na štyri skupiny:
* mostové ţeriavy,
* portálové ţeriavy,
* mobilné ţeriavy,
* veţové ţeriavy,
2.1.1 Mostové žeriavy
Môţu byť jedno, alebo dvojnosníkové (štvornosníkové) vo vyhotovení
s kladkostrojom, alebo ţeriavovým vozíkom – mačkou. Pre menšie nosnosti
a rozpätia je výhodné pouţiť jednonosníkové, , kladkostrojové ţeriavy.
Obr. 1: Model mostového žeriavu [1]

SjF KAVS - PRAT
- 9 -
2.1.2 Portálové žeriavy
Nosná konštrukcia portálových ţeriavov má tvar portálu, ktorý tvorí most, t.j. nosník
plnostenný: alebo priehradkovej konštrukcie uloţený na podperách (nohách), na
ktorých sa ţeriav pomocou pojazdového ústrojenstva pohybuje po ţeriavovej dráhe
v úrovni terénu. Jedna podpera býva pevná, tzv. vodiaca, druhá výkyvná alebo
pruţná. To umoţňuje voľnú tepelnú dilatáciu konštrukcie. Pomer rozpätí k rázvoru
býva 5:1. Nosnosť portálových ţeriavov býva aţ 25t (výnimočne aţ 400t) pri
rozpätiach aţ 120m. Pri väčších, hlavne veľmi veľkých nosnostiach je rozpätie
menšie. Pojazdové rýchlosti ţeriavu sú do 30m.min-1
, mačky aţ do 1500 m.min-1
,
zdvihová do 60 m.min-1
.
Obr. 2: Portálový žeriav [2]
2.1.3 Mobilné žeriavy
Stavajú sa na podvozkoch pásových a kolesových. Kolesové bývajú ţelezničné,
alebo pneumatikové. Pneumatikové môţu byť špeciálne, alebo beţné automobilové.
Príkladom je automobilový ţeriav s teleskopickým výložníkom. Teleskopický
výloţník tvoria dielce obdĺţnikového skriňového profilu zasúvateľného do seba.
Vysunutie dielcov o hodnotu „n“ zaisťujú priamočiare hydromotory.
Rozdelenie: koľajové, samohybné, automobilové, húsenicové, ţeriavové vozíky.
Konštrukciu tvoria dve základné časti – podvozok a nadstavba. Tú tvorí otočný
zvršok (môţe byť riešený ako stĺpový alebo točnicový), strojovňa, kabína, výloţník,
zariadenie na uchopenie bremena (hák).

SjF KAVS - PRAT
- 10 -
Obr. 3: Mobilné žeriavy [3] [4]
2.1.4 Vežové žeriavy
sú rozdelené do dvoch hlavných skupín – s neotočnou a s otočnou veţou.
a) ţeriavy s neotočnou veţou:
* s vodorovným otočným výloţníkom a pojazdnou mačkou,
* so sklopným otočným výloţníkom,
* portálový s otočným výloţníkom ,
* s otočným krakorcovým výloţníkom,
b) ţeriavy s otočnou veţou:
* s vodorovným výloţníkom a pojazdnou vlečnou mačkou,
* so sklopným výloţníkom,
* portálový s otočnou veţou,
* s pákovým výloţníkom,
Základnými časťami veţových ţeriavov sú oceľové konštrukcie, podvozok
a mechanizmy jednotlivých ústrojenstiev (zdvíhacie, pojazdové, sklápanie výloţníka,
otáčanie). Oceľová konštrukcia priehradovej veţe s výloţníkom spočíva na ráme
hornej otočnej stavby. Všetky tieto časti vrátane mechanizmov zdvíhacieho,
sklápacieho a otáčacieho ústrojenstva sa môţu na podvozku otáčať v radiálnom
veľkorozmerovom loţisku.
Podvozky veţových ţeriavov musia umoţňovať prejazd oblúkov o malom polomere
zakrivenia. Podvozky majú so ţeriavovou dráhou styk v troch, alebo štyroch
miestach. Tieto okolnosti značne ovplyvňujú vlastnosti ţeriavov v oblúkoch.

SjF KAVS - PRAT
- 11 -
Obr. 4: Vežový žeriav
[5]
Lanový záves je modelovaný ako kyvadlo. Tento spôsob modelovania nie je ale
exaktný pre všetky moţné hmotnosti nákladu, lebo počíta s tuhým - tyčovým -
závesom. Pri malých hmotnostiach (alebo ţiadnych - bez nákladu) preto nedochádza
k prirodzenému zvlneniu lana. Táto úvaha je však irelevantná, lebo v praxi sa
pouţíva zdvíhacie zariadenie pre hmotnosti, pri ktorých sa sústava evidentne správa
ako pevný záves.
Obr. 5: Model žeriavu
1 – veža
2 – podvozok
3 – otočná konštrukcia veže
4 – otočné ústrojenstvo
5 – výložník
6 – vlečný vozík (mačka)
7 - protizávažie

SjF KAVS - PRAT
- 12 -
Rovinný rez sústavy (obr. 5) opisujú diferenciálne rovnice (1) a vnorené funkcie
podľa (3), veličina x1 reprezentuje polohu, jej derivácia x1'=x2 rýchlosť ţeriavu,
podobne x3 pre uhlovú výchylku a jej derivácia x3'=x4 pre uhlovú rýchlosť závesu s
nákladom. Vo funkciách (3) vystupujú viaceré parametre, ktoré do veľkej miery
spôsobujú premenlivosť dynamiky riadenej sústavy. Popri dĺţke lanového závesu l
najvýraznejší vplyv má hmotnosť bremena mL. Parametre ako mC - hmotnosť ţeriavu
a g - tiaţové zrýchlenie sú počas simulácií konštantné.
[6]
(1)
(2)

SjF KAVS - PRAT
- 13 -
3 KYVADLO:
Fyzikálne kyvadlo je kaţdé teleso otočné bez trenia okolo vodorovnej osi
neprechádzajúcej ťaţiskom. Teleso je stále v rovnováhe, keď je ťaţisko v najniţšej
polohe, t.j. leţí na zvislici pretínajúcu os. Ak je okamţitá uhlová výchylka ťaţiska
z rovnováţnej polohy, mg tiaţ kyvadla, ktorá je sústredená v ťaţisku a a vzdialenosť
ťaţiska od osi, pôsobí na kyvadlo moment
sinmgaM (3)
Moment tu pôsobí proti výchylke a snaţí sa priviesť kyvadlo späť do rovnováţnej
polohy (preto ho označujeme záporným znamienkom).
Kyvadlo vykonáva rotačný pohyb okolo pevnej osi, takţe platí pohybová rovnica
sin2
2
mgadt
dJJM , (4)
kde J je moment zotrvačnosti telesa k osi. Najväčší moţný moment mgaK
nazývame direkčným momentom, analogicky s direkčnou silou pri kmitavom
harmonickom pohybe. Po úprave dostaneme
0sin2
2
J
mga
dt
d (5)
Pre malé výchylky z rovnováţnej polohy môţeme pribliţne poloţiť sin a za
podmienky, ţe v v rovnici 2J
mga platí .2 konšt , dostávame rovnicu
02
2
2
dt
d (6)
ktorá je totoţná s diferenciálnou rovnicou harmonického pohybu, v ktorej je
2 štvorec uhlovej frekvencie.
Pri veľmi malých výchylkách kyvadla z rovnováţnej polohy prejde teda pohybová
rovnica na diferenciálnu rovnicu harmonického pohybu. Keď označíme T0 ako
periódu pri nahradení kmitavého pohybu kyvadla harmonickým pohybom,
dostaneme
ga
R
mga
J
22
20
, (7)

SjF KAVS - PRAT
- 14 -
kde R je polomer zotrvačnosti telesa k osi kyvu. Pri veľmi malých výchylkách
kyvadla z rovnováţnej polohy nezávisí perióda na výkyve m (t.j. maximálnej
výchylke z rovnováţnej polohy). Dobu kyvu (polkmitu) nazývame polovicou
periódy
ga
R
mga
JT
2
0
0 (8)
Je to doba, ktorú potrebuje teleso k pohybu z rovnováţnej polohy do krajnej
výchylky a späť do rovnováţnej polohy, alebo resp. doba prechodu z jednej krajnej
výchylky do druhej krajnej výchylky na opačnej strane, pričom perióda je doba
potrebná k prebehnutiu celého kmitu.
Matematickým kyvadlom nazývame hmotný bod hmotnosti m zavesený na tuhom
vlákne dĺţky l, ktorého hmotnosť je zanedbateľná. Moment zotrvačnosti je tu daný
súčinom hmotnosti bodu a štvorca jeho vzdialenosti od osi, okolo ktorej sa kýva,
teda 2mlJ .
Doba kyvu matematického kyvadla je potom podľa rovnice (8), keď dosadíme za a
a=l
g
l
mgl
ml
2
0 (9)
Dĺţka l matematického kyvadla, ktorá sa kýva rovnako ako fyzikálne kyvadlo, sa
nazýva redukovaná dĺžka fyzikálneho kyvadla. Ak majú byť rovnaké, tak podľa (9)
a (8) je redukovaná dĺţka
a
R
ma
Jl
2
(10)
[7]

SjF KAVS - PRAT
- 15 -
4 SNÍMAČE
4.1 ČLEN PRE ZBER INFORMÁCIÍ
Snímač je jednou z najdôleţitejších častí meracieho kanálu alebo automatizovaných
sústav, hlavne preto, ţe obvykle predstavuje obmedzujúcu časť kanálu, pokiaľ ide
o presnosť, cenu, materiálovú, prípadne výrobnú náročnosť. Pre konštrukciu
snímačov sa vyuţíva veľa fyzikálnych princípov a sú stále hľadané a skúmané nové.
Pouţívajú sa špičkové materiály s definovanou čistotou. Sú sledované parazitné
vplyvy, ktoré sa kompenzujú a obmedzujú. Pre tieto skutočnosti predstavuje snímač
náročný prvok, ktorý väčšinou určuje kvalitu meracieho, alebo regulačného kanálu.
Zatiaľ čo základné elektrické a elektronické obvody boli overované a rozpracované
po celé desaťročia v rôznych odvetviach, sú niektoré typy snímačov úplne nové
a nemáme skúsenosti s ich dlhodobým uţívaním. Cena snímača a zvyšných častí
meracieho obvodu je porovnateľná, v niektorých prípadoch je snímač dokonca
drahší.
Z hľadiska obecného posúdenia funkcie snímača a získania podkladov pre syntézu
meracieho kanálu je nutné poznať pri snímači:
* informačný obsah,
* energetické pomery,
* spoľahlivosť snímačov.
INFORMAČNÝ OBSAH sa nedá u jednotlivých členov meracieho kanálu zväčšovať.
V prípade, ţe vyuţívame zloţitejšie transformácie pri snímačoch, musíme počítať so
zmenšením informačného obsahu.
ENERGETICKÉ POMERY môţeme síce povaţovať za druhoradé, avšak umoţňujú
úzke miesta v prenosovej ceste signálu. Dá sa tieţ zistiť spätný vplyv snímača na
meraný objekt, poprípade vplyv nasledujúceho meracieho obvodu na vlastný snímač.
Energia meraného objektu vyuţiteľná pre snímač musí byť omnoho vyššia ako súčet
energií nutných k fungovaniu snímača, ktorý je s meraným objektom spojený. Inak
dochádza k ovplyvneniu meraného deja.
SPOĽAHLIVOSŤ SNÍMAČA je pomerne zloţitý problém. Spoľahlivosť
jednotlivých častí snímača má byť zrovnateľná. Pri výbere snímača poţadujeme
splnenie niektorých základných poţiadaviek, ako napríklad:

SjF KAVS - PRAT
- 16 -
Jednoznačná závislosť výstupnej veličiny na veličine vstupnej,
Vhodný tvar základnej prenosovej charakteristiky; veľká citlivosť snímača,
Poţadovaná presnosť snímača,
Veľká časová stálosť snímača,
A mnoho ďalších.
Splnenie týchto poţiadaviek je u snímačov veľmi zloţité, v niektorých prípadoch
i nemoţné. Pri výbere snímača prijímame preto väčšinou kompromisné riešenie. Je
nutné uvaţovať vlastnosti celého meracieho kanálu, brať do úvahy jednotlivé časti,
riešiť celý kanál komplexne.
Pre získanie prehľadu o vlastnostiach snímačov a moţnosti ich porovnania je vhodné
uvaţovať o dvoch základných skupinách snímačov.
1. aktívne (generátorové): pri pôsobení neelektrickej veličiny sa chová snímač
ako zdroj elektrickej energie.
2. pasívne: pôsobením neelektrickej veličiny na snímač sa mení niektorý z jeho
parametrov.
Prevod neelektrickej veličiny u snímačov môţe byť:
a) jednoduchý: meraná neelektrická veličina sa mení priamo na veličinu
elektrickú.
b) niekoľkonásobný: meraná neelektrická veličina sa mení na inú neelektrickú
veličinu a aţ následne sa mení na veličinu elektrickú.
Prevod môţe byť niekedy i zloţitejší. Tento typ je veľmi
častý.
Podľa vstupných neelektrických veličín rozoznávame :
Snímač mechanických veličín,
Snímač tepelných veličín,
Snímač chemických veličín,
Snímač ţiarenia
A ďalšie.
Jednotlivé skupiny sa dajú rozčleniť, čo je zaujímavé pre uţívateľa (projektanta). Pre
konštruktéra meracích zariadení je vhodnejšie označenie z hľadiska vyuţitého
princípu pôsobenia:

SjF KAVS - PRAT
- 17 -
SNÍMAČE AKTÍVNE: termoelektrické,
piezoelektrické,
indukčné ,
ďalšie.
SNÍMAČE PASÍVNE: odporové,
indukčnostné,
kapacitné,
ďalšie.
Ďalej je moţné ešte špeciálne delenie na snímače dotykové a bezdotykové.
4.2 OPTOELEKTRONICKÉ SNÍMAČE:
Princíp:
Obr. 6: bloková schéma optoelektronického snímača
Poţiadavku zaistenia nerušeného výstupného signálu zo snímača a jeho prenosu aţ
do miesta jeho spracovania je moţné realizovať snímačmi optoelektronickými.
Meraná neelektrická veličina (poloha, rýchlosť, teplota a pod.) je privedená na vstup
optoelektronického snímača, v ktorom je prevedená na signál, ktorý ma charakter
ţiarenia v ultrafialovej, viditeľnej, alebo infračervenej oblasti spektra.
Signál je vedený z miesta merania pomocou svetlovodu aţ do miesta spracovania
signálu. Tu je prevedený pomocou niektorého typu fotoelektrických snímačov
(fototranzistor, fotodióda a pod.) na elektrický signál. Je to preto, ţe ďalšie
spracovanie tohto signálu je v súčasnej dobe najvýhodnejšie elektrickou cestou.
Na obr. 7 sú naznačené blokové schémy základných typov optosnímačov.
Obr. 7: blokové schémy základných typov optoelektronických snímačov

SjF KAVS - PRAT
- 18 -
Na obr. 7a) je schéma určená pre meranie ţiarenia. Snímač teda nepotrebuje ani
zdroj ţiarenia, ani zdroj elektrického prúdu. Pomocou tohto snímača iba zaisťujeme
kvalitné snímanie tohto ţiarenia a jeho ďalší prenos. Tento princíp sa dá aplikovať
pri meraní zdrojov ţiarenia, teploty a pod.
Usporiadanie „b“ je bloková schéma optoelektronického snímača, ktorý sa chová
ako zdroj ţiarenia napájaný elektrickým prúdom. Ţiarenie na výstupe snímača sa
mení podľa vstupnej neelektrickej veličiny. Ako príklad môţeme uviesť
elektroluminiscenčnú diódu, ktorá je napájaná konštantným prúdom, pričom ţiarivý
tok je menený pomocou clony, alebo iným spôsobom podľa vstupnej neelektrickej
veličiny.
Usporiadanie „c“ je princíp optoelektronického snímača, ktorý je napájaný zo zdroja
ţiarenia, pričom prívod tohto ţiarivého toku je prevedený pomocou svetlovodu.
Ţiarivý tok je v optoelektronickom snímači menený neelektrickou veličinou
a pomocou toho istého, alebo iného svetlovodu je privedený do miesta spracovania
signálu.
Z uvedeného teda vyplýva, ţe súčasťou snímača je zdroj ţiarenia (od ultrafialovej aţ
po vzdialenú infračervenú oblasť), ktorý vyhovuje daným podmienkam. V súčasnej
dobe sa dajú povaţovať za výhodné tieto zdroje:
1. elektroluminiscenčná dióda,
2. polovodičový laser,
3. ţiarovka,
4. ďalšie (výbojky, elektroluminiscenčný kondenzátor a pod.).
Vo všetkých prípadoch týchto zdrojov ţiarenia sa dá signál modulovať buď v časti
elektrickej (podľa obr. 7 b) alebo na výstupe ţiarivého toku (podľa obr.7 c).
Pre popis vlastností týchto zdrojov ţiarenia sú pouţívané nasledujúce
charakteristiky:
1. voltampérová charakteristika,
2. jasová charakteristika,
3. spektrálna charakteristika,
4. smerová charakteristika,
5. ďalšie (teplotná, časová...).

SjF KAVS - PRAT
- 19 -
Jasová charakteristika je závislosť jasu na veľkosti riadiaceho napätia, alebo prúdu
vyvolávajúceho ţiarenie zdroja. Spektrálna charakteristika je závislosť jasu na dĺţke
vlny generovaného ţiarenia. Frekvenčná charakteristika je závislosť jasu na kmitočte
budiaceho signálu. Smerová charakteristika je závislosť jasu na priestorovom uhle
meranom od osi zdroja ţiarivého toku.
4.3 JEDNOTLIVÉ ZDROJE ŽIARENÍ:
4.3.1 Žiarovky a výbojky
Predstavujú klasické zdroje ţiarenia, pričom základné vlastnosti sú uţ dostatočne
podrobne popísané. V ich vývoji nedochádza mimo zvýšenia ţivotnosti
k výraznejším zmenám. Výhodou týchto zdrojov je relatívne vysoká účinnosť (aţ
80%), veľká šírka spektra a pod. Nevýhodou je malá odolnosť voči mechanickému
namáhaniu, veľká spotreba elektrickej energie, úzky pracovný kmitočet. Mimo toho
sú ţiarovky naviac zdrojom tepla. Z týchto vlastností vyplýva, ţe ţiarovky a výbojky
sú vhodné tam, kde je nutné získať veľký ţiarivý výkon alebo ţiarenie so širokým
spektrom.
4.3.2 Luminiscenčné kondenzátory
Pri realizácii luminiscenčných kondenzátorov vyuţívame vlastnosti niektorých
zlúčenín, u ktorých dochádza priloţením silného vonkajšieho elektrického poľa
k luminiscencii. Jedná sa predovšetkým o zlúčeniny prvkov druhej a šiestej skupiny
periodickej sústavy prvkov. Typickými zástupcami sú zlúčeniny zinku a kadmia so
sírou a selénom (ZnS, SnSe, ZnCdS a ďalšie). Luminofory vydávajú takmer
monochromatické ţiarenie vo viditeľnej oblasti spektra. Účinnosť týchto zdrojov je
pomerne malá. Neprevyšuje jednotky percent. Nevýhodou je nízka intenzita ich
ţiarenia, malá ţivotnosť a veľká zotrvačnosť (10-3
s). Pre uvedenú aplikáciu sú zatiaľ
nevhodné.
4.3.3 Elektroluminiscenčné diódy
Sú v súčasnosti najlepšie prepracované a najperspektívnejšie pre oblasť meracej
techniky. K vyţarovaniu dochádza u týchto prvkov intenzívnou rekombináciou
nosičov náboja v oblasti PN polovodiča. Pre realizáciu elektroluminiscenčných diód
sú vhodné z polovodičov tie materiály, ktoré sú tvorené prvkami tretej a piatej
skupiny periodickej tabuľky. Základnými materiálmi sú GaAs, GaP, GaAsP.

SjF KAVS - PRAT
- 20 -
Pre popis vlastností týchto zdrojov pouţívame niekoľko základných charakteristík.
Na obr. 8a) sú uvedené V-A charakteristiky niektorých elektroluminiscenčných diód
(1 – GaAs, 2 – GaP, 3 – SiC). Pre prispôsobenie zdroja ţiarenia svetlovodiča a čidla
ţiarenia je dôleţitá spektrálna charakteristika. Na obr. 8b) sú charakteristiky
elektroluminiscenčných diód firmy Siemens (krivka 1 – GaAsP, 2 – GaP).
Obr. 8: Voltampérové charakteristiky elektroluminiscenčných diód
4.3.4 Polovodičové laserové diódy
Elektroluminiscenčné diódy sú vzhľadom ku svojej nízkej účinnosti nevhodné pre
prenos ţiarivého toku na väčšie vzdialenosti. Toto bol základný dôvod pre vývoj
technológie polovodičových laserov. Laserová dióda je vytvorená ako prechod PN
v kryštáli polovodiča. Dve náprotivné strany sú zbrúsené tak, ţe tvoria rezonátor.
Impulzovým riadením takéhoto laseru je moţné získať špičkový výkon desiatok
wattov. Dĺţka impulzov sa však pohybuje v desiatkach aţ stovkách ns. Šírka spektra
ţiarenia polovodičových laserov je uţšia ako pri luminiscenčných diódach.
Ţivotnosť týchto zdrojov ţiarenia je nateraz obmedzená. Pre aplikácie
v optoelektronických snímačoch sa nateraz s týmito zdrojmi ţiarenia nedá počítať.
[8]

SjF KAVS - PRAT
- 21 -
5 REGULÁCIA, REGULÁTORY
5.1 REGULÁCIA:
Princíp systému regulácie je znázornený na obrázku 9. Ide o dôleţitý systém riadenia
s uzavretou štruktúrou. Regulovací prvok nie je síce informovaný o poruchách, ale je
informovaný o stave regulovaného prvku.
Obr. 9: Bloková schéma systému regulácie
Regulácia je značne dokonalejší druh riadenia ako ovládanie (riadenie bez spätnej
väzby), pretoţe regulujúci prvok môţe vytvárať také pôsobenie, ktoré bude
zaručovať, aby sa výsledok regulácie čo najviac pribliţoval poţadovanému cieľu.
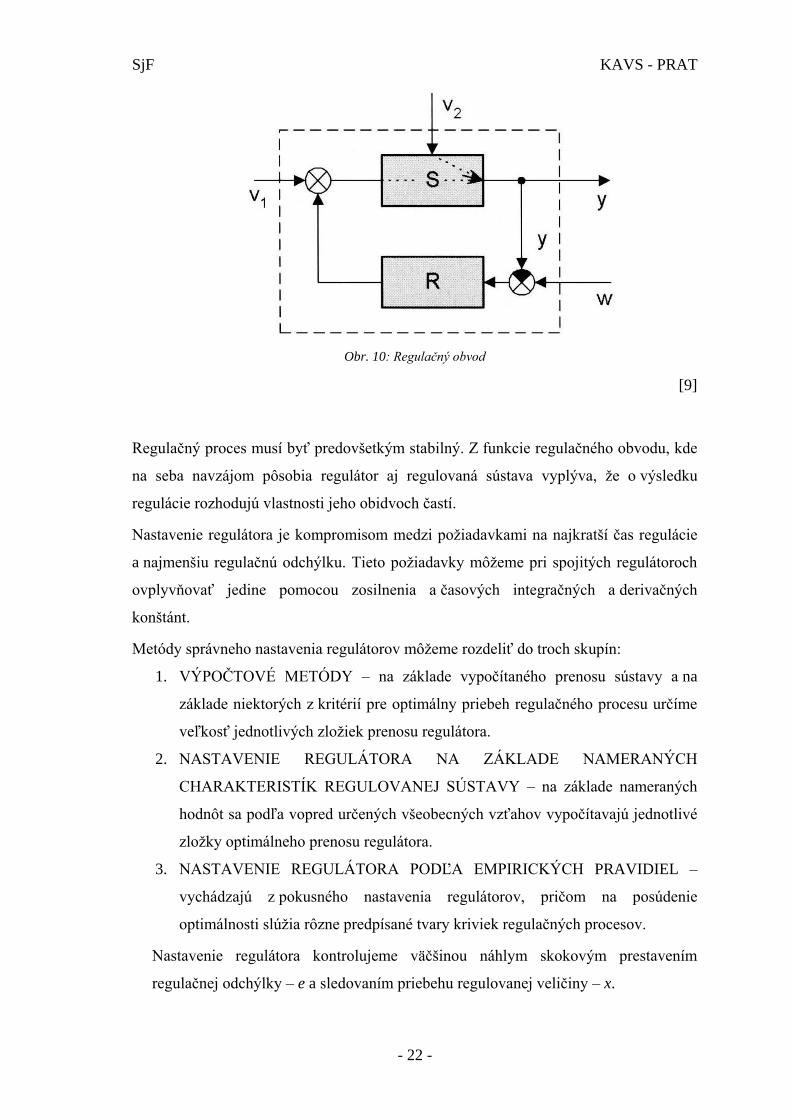
Regulačný obvod na obr. 10 je systém, ktorého prvky sú jeho jednotlivé členy (S –
regulovaná sústava, R – regulátor), podnety vonkajšieho okolia tvoria poruchy (v1,
v2) a riadiaca veličina w a odozvou je regulovaná veličina y, merateľná na výstupe.
Matematická funkcia je systémom, ktorého prvky sú príslušné početné operácie,
napr. pri rovnici
dtuuyydt
d212 (11)
Sú nimi prvok pre násobenie dvoma, prvok pre integrovanie, prvok pre derivovanie
a prvok pre súčet. Nezávislé premenné u1, u2 sú vstupnými veličinami, výstupnou
veličinou je závislá premenná y.
SjF KAVS - PRAT
- 22 -
Obr. 10: Regulačný obvod
[9]
Regulačný proces musí byť predovšetkým stabilný. Z funkcie regulačného obvodu, kde
na seba navzájom pôsobia regulátor aj regulovaná sústava vyplýva, ţe o výsledku
regulácie rozhodujú vlastnosti jeho obidvoch častí.
Nastavenie regulátora je kompromisom medzi poţiadavkami na najkratší čas regulácie
a najmenšiu regulačnú odchýlku. Tieto poţiadavky môţeme pri spojitých regulátoroch
ovplyvňovať jedine pomocou zosilnenia a časových integračných a derivačných
konštánt.
Metódy správneho nastavenia regulátorov môţeme rozdeliť do troch skupín:
1. VÝPOČTOVÉ METÓDY – na základe vypočítaného prenosu sústavy a na
základe niektorých z kritérií pre optimálny priebeh regulačného procesu určíme
veľkosť jednotlivých zloţiek prenosu regulátora.
2. NASTAVENIE REGULÁTORA NA ZÁKLADE NAMERANÝCH
CHARAKTERISTÍK REGULOVANEJ SÚSTAVY – na základe nameraných
hodnôt sa podľa vopred určených všeobecných vzťahov vypočítavajú jednotlivé
zloţky optimálneho prenosu regulátora.
3. NASTAVENIE REGULÁTORA PODĽA EMPIRICKÝCH PRAVIDIEL –
vychádzajú z pokusného nastavenia regulátorov, pričom na posúdenie
optimálnosti slúţia rôzne predpísané tvary kriviek regulačných procesov.
Nastavenie regulátora kontrolujeme väčšinou náhlym skokovým prestavením
regulačnej odchýlky – e a sledovaním priebehu regulovanej veličiny – x.

SjF KAVS - PRAT
- 23 -
Úlohou regulátora v jednouzlovom regulačnom obvode je vytvárať na základe
regulačnej odchýlky
ywe (12)
takú akčnú veličinu u, ktorá pôsobením na regulovanú sústavu zaisťuje, aby
regulačná odchýlka e bola v kaţdom časovom okamţiku pokiaľ čo moţno
najmenšia.
Tento nárok vyjadrujúci tzv. cieľ regulácie znamená, ţe regulovaná veličina y
v kaţdom časovom okamihu by mala byť pokiaľ moţno rovnaká ako ţiadaná
(riadiaca) veličina w. Matematicky sa dá cieľ regulácie zapísať napr. v obrazoch
WYE 0 (13)
štandardne označených podľa najčastejšie pouţívanej abstraktnej systémovej
predstavy o regulačnom obvode v podobe blokovej schémy na obr. 11.
Obr. 11: Bloková schéma uzavretého regulačného obvodu
Je zrejmé, ţe plnenie cieľa regulácie sa zostavuje z dvoch súčasne regulátorom
vykonávaných činností:
• sledovanie ţiadanej veličiny w regulovanou veličinou y,
• potlačenie vplyvu poruchových veličín v a d na regulovanú veličinu y.
[10]

SjF KAVS - PRAT
- 24 -
6 PLC
Vznikli ako náhrada „pevnej“ logiky pred pribliţne 30 rokmi a v súčasnosti sú to
najpouţívanejšie riadiace systémy v automatizačnej technike. Dôvodom sú malé
rozmery, nízka cena a veľký výber - široké spektrum pouţiteľnosti. Pôvodne obsahovali
len inštrukcie modelujúce funkcie reléovej logiky (snímanie I/O, logické operácie,
pamäť, časovače), neskôr sa pridali algoritmy regulácie, merania, diagnostiky.
Skupiny PLC: Pico automaty (Obr. 12a)
Micrologix (Obr. 12b)
SLC 500 System (Obr. 12c)
PLC-5 System (Obr. 12d)
Obr. 12: Skupiny PLC
6.1 Micrologix
Sú to malé riadiace systémy, vhodné pre široké spektrum aplikácii od
jednoúčelových strojov (10 I/O) aţ po stredne malé aplikácie vyţadujúce 300 I/O.
Výhody:
- malé rozmery,
- nízka cena,
- ľahká inštalácia,
- jednoduché programovanie.
Nevýhodou je absencia on-line programovania, čo znamená, ţe okrem zmeny
dátových premenných nemôţe programátor počas behu procesu program upravovať.
[11]
Tento riadiaci systém v sebe spája výhody kompaktného a modulárneho systému
s moţnosťou rozšírenia aţ o 16 vstupno-výstupných modulov. MicroLogix1500
ponúka oproti MicroLogixu 1200 voliteľný procesor, to znamená, ţe procesor uţ nie
je napevno zabudovaný do základnej jednotky, ale moţno ho vybrať. V súčasnosti sú

SjF KAVS - PRAT
- 25 -
v ponuke iba dva procesory s označením 1764-LSP a 1764-LRP. K zaujímavým
hardvérovým vlastnostiam patria 2 čítačové vstupy s frekvenciou 20 kHz a dva
rýchle výstupy s frekvenciou 20 kHz, rýchle vstupy typu „latch“ na zachytávanie
mikrosekundových pulzov, dva potenciometre zabudované priamo v riadiacom
systéme, ktorých hodnota je softvérovo dostupná. Na rozšírenie riadiaceho systému
sa pouţívajú moduly radu Compact I/O. Okrem štandardných I/O modulov je k
dispozícii aj modul rýchleho čítača do frekvencie 1 MHz, špeciálne analógové
moduly na meranie mV a termočlánkov a skener modul pre sieť DeviceNet, takţe k
riadiacemu systému MicroLogix moţno pripojiť distribuované I/O alebo snímače,
frekvenčné meniče softštartéry atď. Vstupnovýstupné moduly radu Compact I/O
vyuţívajú aj riadiace systémy radu novej generácie CompactLogix. Okrem lokálneho
pouţitia v priamom spojení s procesorom moţno moduly Compact I/O pouţiť aj ako
distribuované vstupy a výstupy cez sieť DeviceNet. Adresový priestor vrátane
distribuovaných vstupov a výstupov je vyšší neţ 300 I/O, pre reálnu aplikáciu sa
však odporúča maximálne 300 I/O vzhľadom na kapacitu pamäte. Na komunikáciu
môţu byť vyuţité dve sériové linky RS232 s voliteľným protokolom DF1, DH485,
ModBus RTU slave.
[12]
6.2 SLC 500
Riadiaci systém SLC 500 je výkonný, modulárny, spoľahlivý a uţívateľsky
prístupný riadiaci systém s priaznivým pomerom výkon/cena. Programovanie sa
prevádza pomocou PC. Modulárny systém SLC 500 je stavebnica skladajúca sa zo
zdrojov, procesorov a periférnych jednotiek zasunutých do šasi so 4, 7, 10 alebo 13
pozíciami.
Riadiace systémy SLC 500 môţu navzájom komunikovať po sériovej priemyselnej
dátovej sieti DH-485. Vyššie verzie môţu komunikovať po sieti DH+ (procesor
5/04), alebo dokonca po sieti Ethernet s protokolom TCP/IP (procesor 5/05). Ďalšiu
moţnosť komunikácie predstavuje pouţitie niektorého zo špeciálnych
komunikačných modulov, pomocou ktorých je moţné prepojiť Allen-Bradley dátové
siete Data Highway Plus a DH-485 a tým zaistiť prenosy dát medzi procesormi SLC
500 a PLC-5.
[13]

SjF KAVS - PRAT
- 26 -
7 PROGRAMOVACÍ SOFTWARE
Na prácu s procesormi firmy A-B sa vyuţíva program RSLogix, ktorý je určený
predovšetkým na vytváranie programov, ich kompilovanie a následne nahrávanie do
PLC.
7.1 Rebríkové diagramy (Ladder diagrams)
Vyvinuli sa na základe princípov reléovej logiky. Zvislé čiary na ľavej a pravej
strane symbolizujú napájanie, ktoré je prepojené priečkami (riadkami). Riadky sa
skladajú z podmienkovej (ľavej) časti, a príkazovej (pravej) časti, pričom na splnenie
príkazu je potrebné splnenie podmienky. Sériové zapojenie prvkov označuje logický
súčin, paralelné zapojenie logický súčet. Program vykonáva inštrukcie smerom zhora
nadol. Pokiaľ nie je podmienka splnená, pokračuje sa na nasledujúcom riadku.
V príkazovej časti sa nachádzajú logické výrazy, najčastejšie ide o kontrolu stavu
kontaktov – pracuje sa s hodnotami log 0 a log 1.
Symbolická
značka Názov Opis značky
Podmienkové výrazy
Examine if closed
(XIC)
Otvorený kontakt => Podmienka je splnená, ak sa
jeho hodnota rovná log 1
Examine if open
(XIO)
Zatvorený kontakt => Podmienka je splnená, ak
sa jeho hodnota rovná log 0
Príkazové výrazy
Output Energize
(OTE)
Výstup má hodnotu log 1 pokým je podmienka
splnená
Output Latch
(OTL)
Nastaví výstup na log 1, ak je podmienka splnená
aspoň 1x
Output Unlatch
(OTU)
Vynuluje výstup, ak je podmienka splnená aspoň
1x
Tab. 1: najčastejšie výrazy rebríkových diagramov

SjF KAVS - PRAT
- 27 -
7.2 RSLinx
Väčšina aplikačných programov firmy Rockwell Automation vyuţíva pre spojenie
s hardwearom samostatný komunikačný program RSLinx, ktorý zabezpečuje
nastavenie komunikačných ovládačov, monitorovanie ich stavu a sledovanie
dátových poloţiek v programovateľných automatoch. Program RSLinx existuje
v niekoľkých obmedzených funkčných verziách. Najdôleţitejšie sú Lite a Gateway.
Verzia Lite je štandardná súčasť všetkých programov. Umoţňuje zadefinovať všetky
ovládače a pre štandardnú komunikáciu úplne vyhovuje. Rozšírená verzia Gateway
umoţňuje prístup k zariadeniu a vyuţíva ovládač na vzdialenom počítači pripojenom
cez EtherNet. Ďalšou výhodou je integrovaný prístup k dátam cez protokoly OPC
(OLE for Process Control) a DDE (Dynamic Data Exchange).
Jedná sa o programový nástroj slúţiaci na nastavenie spojenia medzi PC a PLC.
Obr. 13: Prostredie RSLinx
7.3 RSLogix 500
RSLogix 500 je programovací software od spoločnosti Rockwell Sofftware pre
riadiaci systém SLC-500.

SjF KAVS - PRAT
- 28 -
7.3.1 Organizácia súborov
Súbory procesora - vytvárajú sa počas off-line reţimu a ukladajú sa na HDD.
Potom sú nahrávané do PLC a vyuţívané na on-line operácie. Obsahujú viacero
súborov, ktoré rozdelia napísaný program na menšie, lepšie spravovateľné časti.
Tvoria ich 2 hlavné skupiny: Programové súbory a Dátové súbory.
Programové súbory - obsahujú riadiace informácie, hlavný program
a podprogramy, pričom posledné dve skupiny sa dajú aj ľubovoľne pomenovať.
1, Súbor 0 (SYS 0) - Systémový program - obsahuje rôzne systémové
informácie a uţívateľom naprogramované informácie (typ
procesora, I/O konfigurácia, názov súboru procesora
a heslo),
2, Súbor 1 (SYS 1) - Rezervovaný súbor,
3, Súbor 2 (LAD 2) - Hlavný program - obsahuje uţívateľom naprogramované
inštrukcie definujúce spôsob riadenia automatu,
4, Súbory 4÷N - Podprogramy - sú vykonávané na základe inštrukcií v LAD2.
Dátové súbory - obsahujú stavové informácie vzťahujúce sa na externé I/O a všetky
ostatné inštrukcie pouţívané počas programovania. Súbory sú usporiadané podľa
druhu informácií, ktoré obsahujú:
1, Výstupný (O0) - uchováva stavy na výstupnom terminály,
2, Vstupný (I1) - uchováva stavy na vstupnom terminály,
3, Stavový (S2) - obsahuje stavové informácie,
4, Bitový (B3) - pouţíva sa na ukladanie interných bitových premenných,
5, Časovač (T4) - obsahuje prednastavenú a dosiahnutú hodnotu a stavové bity,
6, Počítadlá (C5) - obsahuje prednastavenú a napočítanú hodnotu a stavové bity,
7, Súbory registrov (R6) - obsahuje informácie pre špeciálne inštrukcie,
8, Celočíselné (N7) - uchováva číselné alebo bitové údaje.
Označovanie dátových premenných: x f : e . s / b
x - identifikátor typu dátového súboru,
f - číslo dátového súboru,
: - oddeľovač blokov,
e - číslo bloku alebo slotu,

SjF KAVS - PRAT
- 29 -
. - oddeľovač slov,
s - číslo slova,
/ - oddeľovač bitov,
b - číslo bitu v slove
7.3.2 Programovanie v RS Logix
Na hornej lište, ako je na obrázku 14 vyznačené, sa nachádza zoznam inštrukcii
usporiadaných do skupín.
Prvá skupina označená User obsahuje všetky základné inštrukcie, ktoré boli
popísané v stati 7.1. a tieţ tlačidlá na vytvorenie nového riadku a paralelnej vetvy.
V ďalších skupinách sa nachádzajú zloţitejšie príkazy, z ktorých sa najčastejšie
pouţíva skupina Timer/Counter na prácu s časovačmi a počítadlami a skupina
Program Control obsahujúca inštrukcie na skoky do podprogramov a prácu
s návestiami.
Ku kaţdému príkazu je potrebné priradiť nejakú bitovú premennú. To sa dá
urobiť manuálne, napísaním celej adresy príslušného bitu so striktným dbaním na
syntax, alebo jednoduchšie pomocou funkcie Drag & Drop. To znamená, ţe stačí
mať počas písania programu otvorené okná s pouţívanými dátovými súbormi (napr.
vstupmi a výstupmi) a pouţitím myši potrebné bity jednoducho „pretiahnuť“ aţ
na poţadovaný príkaz, kde sa uloţí adresa daného bitu.
7.3.3 Nahrávanie programu do PLC
Keď je program uţ vytvorený a prešiel verifikáciou, je moţné vyskúšať jeho
funkčnosť priamo na PLC.
Cez menu v ľavom hornom rohu sa zvolí poloţka Download. Pokiaľ je PLC
pripojené, po potvrdení informačného dialógu sa začne program nahrávať do
automatu, čo trvá rádovo sekundy. Po úspešnom ukončení prenosu dát program sám
navrhne prechod do On-line reţimu, ktorý by inak bolo potrebné zapnúť poloţkou
Go Online.
V ňom je moţné pomocou funkcií Toggle Bit, Force On a Force Off odskúšať
funkčnosť jednotlivých podmienok priamo na riadiacom systéme. Ak je program
bezchybný, v tom istom menu sa cez novovytvorenú poloţku Run spustí do činnosti.

SjF KAVS - PRAT
- 30 -
Obr. 14: Spôsob nahrávania programu do PLC
[11]
7.4 RS VIEW 32
RSView32 je vizualizačný 32-bitový softvér pracujúci pod WindowsNT, Windows
2000 a Windows 95. Tento produkt bol špeciálne navrhnutý pre 32- bitovú
architektúru, čo prinieslo podstatné zvýšenie výkonu a spoľahlivosti tohto programu.
RSView je moţné prevádzkovať na štandardných PC s minimálnou konfiguráciou
Pentium 120 MHz a 64 MB RAM. Pri vývoji boli pouţité najnovšie technológie
firmy Microsoft, ako je MFC 4.0, OLE, COM-based programming, ActiveX atď.
RSView32 je dodávaný v dvoch základných verziách. Verzia RSView Works
obsahuje kompletné vývojové prostredie na vytváranie aplikácií a modul RunTime.
Verzia RSView Runtime umoţňuje beh uţ vytvoreného projektu, ale neumoţňuje
zmenu projektu. Plná verzia umoţňuje definovať aţ 100 000 poloţiek databázy
(premenných). Okrem štandardnej inštalácie pre PC (aplikácie s nízkym počtom
operátorských pracovísk) sa ponúka aj inštalácia klient-server, nazvaná RSView
Active Display. Ponúka veľmi výkonný prístup k beţiacemu projektu na serveri zo
vzdialeného klienta, umiesteného kdekoľvek na svete. Na prístup pouţíva program
Active Display Station umoţňujúci prístup cez LAN, alebo Internet Explorer, ktorý
sprístupňuje cestu cez internet alebo intranet.

SjF KAVS - PRAT
- 31 -
RSView32 okrem štandardných grafických nástrojov na vytváranie obrazoviek
(čiary, polygóny, elipsy, numerické displeje atď.), obsahuje tieţ rozsiahlu kniţnicu
pripravených objektov, ktoré z nej moţno vkladať do aplikačnej obrazovky iba
presunutím myšou.
Obr. 15: Knižnice v RS View
RSView32 tieţ umoţňuje import grafiky z iných aplikácií Windows (copy a paste)
alebo priamo vloţenie obrázka vo formáte BMP, WMF, GIF, JPEG, DFX a iných.
Objekty je moţné zoskupovať, ako aj animovať jednotlivé objekty alebo skupiny. To
zahŕňa zmenu farby, rotácie, vertikálny alebo horizontálny posun, zmenu rozmerov
alebo plynulú výplň. Na riadenie animácie môţe byť pouţitá premenná priamo
z databázy alebo prakticky ľubovoľný matematický alebo logický výraz zloţený
z viacerých premenných.
Grafický editor podporuje tieţ technológie OLE2.0. Ku kaţdému objektu je moţné
priradiť nejakú akciu, ktorá sa vyvolá po kliknutí myšou na tento objekt. Na
ovládanie objektov obrazovky je moţné pouţiť buď premenné priamo z databázy
alebo parametre. To umoţňuje viacnásobné pouţitie jednej obrazovky (napr.
ovládanie viacnásobného počtu motorov so zhodným spôsobom riadenia), vtedy sa
pri ich vyvolaní uvedú konkrétne premenné z databázy.
Grafický editor obsahuje preddefinovaný objekt RS trend, ktorý umoţňuje ľahko
vytvárať grafické znázornenia stavu jednotlivých veličín v čase. Je moţné vytvárať
rýchlo a jednoducho grafy priamo z premenných databázy v reálnom čase alebo z

SjF KAVS - PRAT
- 32 -
historických dátových súborov. Kaţdý graf môţe zobraziť aţ 16 kriviek. Počet
grafov v aplikácii nie je obmedzený. Oproti predchádzajúcim verziám bola
dramaticky zvýšená rýchlosť vykresľovania grafov.
RSView umoţňuje definovať určitý počet komunikačných kanálov, vďaka čomu sa
dajú čítať dáta z niekoľkých rôznych zariadení. Štandardne sa na komunikáciu so
zariadeniami Allen Bradley pouţíva komunikačný softvér RSLinx. Tento softvér
umoţňuje rýchlu a spoľahlivú komunikáciu s riadiacimi systémami Allen-Bradley,
prípadne i s riadiacimi systémami iných výrobcov (po nainštalovaní príslušného
drivera). Na komunikáciu s neštandardnými aplikáciami je moţné nadefinovať
komunikačný kanál DDE, čo umoţňuje výmenu dát so všetkými programami
podporujúcimi DDE (napr. Excel). Údaje sa tieţ dajú distribuovať cez sieť ethernet
pomocou NetDDE, čo zaručí, ţe kaţdý na podnikovej sieti môţe vidieť, poprípade
zasahovať do riadiaceho systému, a tým i do technológie, s prakticky veľmi nízkymi
nákladmi na jednotlivú stanicu. Novinkou je moţnosť definovať kanál OPC (OLE
for process control), pomocou ktorého môţeme komunikovať s mnoţstvom
zariadení rôznych výrobcov, ktoré podporujú OPC.
RSView32 v sebe obsahuje veľmi výkonný alarming, ktorý umoţňuje nielen
zobrazovať alarmy v prehľadnom formáte, ale i previesť akciu na základe tohto
alarmu (napr. spustiť zvuk pomocou WAV súboru, vytlačiť hlásenie na tlačiarni
atď.). Alarmy môţu byť odvodené od binárnych premenných alebo od analógových
premenných, kde je moţné nastaviť niekoľko alarmových medzí s rôznou prioritou.
Firma Rockwell Software (divízia Rockwell Automation) je jedinou firmou z oblasti
automatizačnej techniky, ktorá vlastní licenciu pre pouţívanie Microsoft Visual
Basicu ako scripting jazyka. To umoţňuje vytváranie vlastných procedúr priamo
v RSView vo Visual Basicu, čo podstatne rozširuje moţnosti RSView. Pre VB
skripty sú dostupné niektoré dôleţité objekty jadra RSView, takţe je moţné priamo
pristupovať do databázy, ku grafickým objektom atď.
Záverom môţeme povedať, ţe výhodou RSView je veľmi jednoduché vytváranie
aplikácií s moţnosťou odskúšania funkcie priamo vo vývojovom prostredí a veľká
prehľadnosť celého projektu. Aplikácie môţe vytvárať alebo aspoň upravovať
priamo technológ bez špeciálnych znalostí programovania. Moţnosť vloţiť
ACTIVE-X objekty a Visual Basic scripting robia z RSView32 veľmi otvorený
systém. [14]

SjF KAVS - PRAT
- 33 -
8 PRIPOJENIE A OVLÁDANIE MODELU CEZ PC
8.1 PRIPOJENIE MODELU K CUDZIEMU ZDROJU
Model ţeriavu ako taký je ovládateľný cez ovládač, ktorý je cez vodiče prepojený
s riadiacou kabínou ţeriavu, kde sa nachádza motorček na otáčanie ţeriavu okolo
vlastnej osi, a následne s mačkou s motorčekmi pre posuv mačky a navíjanie lana.
Aby mohol byť ţeriav riadený cez PC, bolo nutné skôr, ako ho k nemu pripojíme,
nahradiť ovládač elektronickým zapojením, ktoré by zabezpečilo dve základné veci:
1. aby nebol ţeriav závislý na napájaní z bateriek ovládača, ale tvrdého
symetrického zdroja
2. reverzáciu motora a jej plynule spojité ovládanie
C1
C2
M1 2
MOTOR ACGND
T1TIP127
T2TIP120
Rb1
Rb2POT
+5V
-5V
Obr. 16: Schéma zapojenia motora
Kde tranzistory typu TIP v sebe obsahujú dva tranzistory v Darlingtonovom zapojení
spolu s ochrannými odpormi a diódou (obr. 17)
Obr. 17: Darlingtonové zapojenie tranzistorov
[15]
Najskôr sa funkčnosť daného zapojenia odskúšala pomocou potenciometra (obr. 16),
ktorý následne nahradil PLC s analógovým výstupom (MicroLogic 1500) ovládaný
cez vizualizačný program RSView32. Obvod je napájaný stabilizovaným zdrojom
BS 525, kde sú spojené 2 zdroje a ich stred je zem.

SjF KAVS - PRAT
- 34 -
Obr. 18: Stabilizovaný zdroj Tesla BS - 525
Tento zdroj je dimenzovaný na maximálne prúdové zaťaţenie 1A, čo pri beţnej
prevádzke stačí, keďţe pri napätí +/-5V preteká obvodom prúd o veľkosti cca. 0,8A.
Problémom je ale rozbeh motorčekov, kedy je prúdová špička cca. 1,5A. Tento
problém riešia 2 paralelne k zdroju zapojené kondenzátory C1 a C2 (obr. 16)
s vysokou kapacitou (rádovo mF).
Samozrejme tento zdroj sa dá nahradiť zdrojom s vyšším výkonom, kde si hodnoty
napätia a prúdu nastavíme vhodne zvoleným transformátorom, striedavé napätie je
usmerňované cez dve dvojice diód (dvojcestný usmerňovač), vyhladené zberacími
kondenzátormi a následne sú ešte pripojené ako stabilizátory zenerové diódy.
ZD
ZDGND
C2
C3Lp
Ls1
Ls2
+5V
-5V
Obr. 19: Alternatívny stabilizovaný zdroj
8.2 PREPOJENIE MODELU ŽERIAVU A PLC
Po overení funkčnosti zapojenia ovládania motora boli k nemu pripojené ďalšie dva
členy a to spínače koncovej polohy mačky. Tie sa priamo pripojili k PLC (I1:35
a I1:36), kde v prípade zopnutia mačkou sa cezeň dostalo napätie 24V na vstup PLC,
na čo by mal program reagovať automatickým vypnutím motorčeka posuvu mačky.
Posledným bodom tejto časti bolo pripojenie snímačov polarity motora, kde boli
pouţité tranzistory ako spínače podľa schémy na obr. 20.

SjF KAVS - PRAT
- 35 -
BC547
T1
1 2
MOTOR AC
M
Rb1
10k
Rb2
10k
Rc15k6
Rc25k6
BC547
T2
GND
U+24V
GND zdroja
PLC;I1:37
PLC;I1:38
Obr. 20: zapojenie tranzistorov ako spínačov polarity motora
Princíp zapojenia je, ţe ak je kladný potenciál medzi napájaním motora a zemou
zdroja, cez Rb1 sa otvorí tranzistor T1 a na I1:37 príde logická nula, čo sa prejaví ako
zhasnutie LED. Zároveň bude zatvorený tranzistor T2, LED na bite I1:38 bude
svietiť. Ak je potenciál záporný, otvorí sa tranzistor T2 a zároveň sa tranzistor T1
zavrie, čo spôsobí zhasnutie LED na bite I1:38 a zasvietenie LED na bite I1:37.
V tabuľke 2a) sú spísané kombinácie logických stavov oboch koncových spínačov
i snímačov smeru posuvu motora. Okrem očakávaných reálnych stavov môţu nastať:
neurčitý stav nastane v prípade, ţe medzi motorom a zemou zdroja bude nulový
potenciál, čo spôsobí, ţe motor ostane stáť. Tento stav bude signalizovaný svietením
oboch LED na PLC. Stav bude trvať aţ do okamihu ďalšieho posúvania sa motora,
teda pripojenia napätia kladného, alebo záporného, podľa ktorého sa motor bude
posúvať.
Chybové stavy:
Chyba a: kombinácia logických stavov 0;0 snímačov Sn.1 a Sn.2 by znamenala, ţe
motor sa hýbe oboma smermi, preto je v reáli nemoţná pri normálnej prevádzke
a v prípade ţe sa to stane, musí byť automaticky vyhodený chybový alarm.
Chyba b: kombinácia logických stavov 1;1 spínačov Sp.1 a Sp.2 by znamenala, ţe sú
spustené oba spínače, čo je v reáli nemoţné, pretoţe motor sa nemôţe nachádzať na
dvoch miestach.
Tabuľka 2b) obsahuje reálne kombinácie z tabuľky 2a), ku ktorým je pridaná
premenná R1, ktorá predstavuje reléový spínací kontakt pre motor posuvu mačky.

SjF KAVS - PRAT
- 36 -
3 4 5 6 bit 3 4 5 6 bit
Sp.1 Sp.2 Sn.1 Sn.2 motor označenie R1 Sp.1 Sp.2 Sn.1 Sn.2 motor označenie
0 0 0 0 chyba a 0 0 0 0 1 chyba c
0 0 0 1 1 0 0 0 1 vľavo
0 0 1 0 0 0 0 1 0 chyba c
0 0 1 1 NS neurčitý stav 1 0 0 1 0 vpravo
0 1 0 0 chyba a 0 0 0 1 1 NS neurčitý stav
0 1 0 1 1 0 0 1 1 NS neurčitý stav
0 1 1 0 0 0 1 0 1 chyba e
0 1 1 1 1 0 1 0 1 chyba d
1 0 0 0 chyba a 0 0 1 1 0 iba vľavo
1 0 0 1 1 0 1 1 0 chyba d
1 0 1 0 0 1 0 0 1 iba vpravo
1 0 1 1 1 1 0 0 1 chyba d
1 1 0 0 chyba a,b 0 1 0 1 0 chyba e
1 1 0 1 chyba b 1 1 0 1 0 chyba d
1 1 1 0 chyba b
1 1 1 1 chyba b
a) b)
Tab. 2: Tabuľka stavov posuvu mačky
Podľa tejto tabuľky tieţ môţu nastať rôzne stavy:
Chybové stavy:
Chyba c: Snímače signalizuje posuv mačky, ale reléový kontakt je rozopnutý.
Chyba d: Spínače sú zopnuté na opačnej strane, ako sa pohybuje mačka. V tomto
prípade je však nutné rozoznať chybu od moţného reálneho stavu, keď bol spínač
zopnutý správne a mačka sa pohybuje smerom od zopnutého spínača. V takomto
prípade je však tento signál veľmi krátky (rádovo desatiny sekundy). Preto sa ním
treba zaoberať aţ v prípade, ţe čas signalizácie je dlhší.
Chyba e: Tento jav nemôţe nastať, pretoţe spínací kontakt motora je rozopnutý
a preto sa motor nemôţe dostať ani do koncovej polohy, ani na ňom nie je napätie
a preto nemôţe byť signalizovaný smer posuvu mačky.
Neurčité stavy:
Čaká sa na to, aké napätie bude privedené na motor. Ak však nie je zopnutý reléový
spínač, motor sa nepohne. Preto sa čaká na stav, keď je kontakt zopnutý a zároveň je
na motor privedené kladné, resp. záporné napätie.

SjF KAVS - PRAT
- 37 -
Očakávané stavy:
Sú to stavy, s ktorými rátame pre bezporuchovú a bezproblémovú prevádzku
ţeriavu. Stavy „vľavo“ a „vpravo“ znamenajú, ţe pri splnení daných podmienok na
vstupe pri zmenení polarity napätia na motore sa automaticky zmení smer (a
v závislosti na napätí aj rýchlosť) motora posuvu mačky. Stavy „iba vľavo“ a „iba
vpravo“ sú stavy, kedy je potrebné zabezpečiť, ţe pri zopnutí spínača sa vypne motor
a je moţné ho stále uviesť do chodu, ale iba opačným smerom (teda keď zmeníme
polaritu napätia).
Program pre ovládanie motora posuvu mačky bol po jeho vytvorení stiahnutý do
príslušného PLC (MicroLogix 1500), to isté bolo spravené so zatiaľ iba pomocným
programom pre PLC SLC500 a následne boli overené stavy z tabuľky 2 a zároveň aj
fungovanie doterajšieho zapojenia.
Ďalej bolo potrebné vyhotoviť obrazovku ovládania modelu v programe RS View.
Obr. 21: Obrazovka ovládania modelu žeriavu
Aby obsluha modelu vedela, akú činnosť model v danej chvíli vykonáva, musela
obrazovka obsahovať nie len ovládacie prvky, ale aj prvky signalizačné, kde museli
byť zahrnuté všetky moţnosti pohybu modelu. Tieţ nesmeli chýbať popisy

SjF KAVS - PRAT
- 38 -
k jednotlivým častiam, aby boli všetky riadiace aj signalizačné časti popísané, čo
značne zjednodušuje úlohu obsluhy.
8.3 OVLÁDANIE A SIGNALIZÁCIA POSUVU MAČKY
Ovládací panel sa delí, taktieţ ako ovládanie samotné, na niekoľko častí. Kaţdej je
treba venovať sa osobitne.
8.3.1 Ovládanie posuvu mačky
Mačku (posuvný vozík) je nutné vedieť ovládať v kaţdej situácii a keďţe je ručným
ovládaním veľmi zloţité dostať bremeno na presne stanovenú polohu (s ohľadom na
dojazd motora po jeho vypnutí), bolo by ovládanie digitálne veľmi nepostačujúce.
Preto je motor posuvu mačky pripojený na analógový výstup PLC Micrologix 1500
a teda rýchlosť a smer posuvu sa dá ovládať riadením napätia na motorčeku.
Obr. 22: Ovládanie posuvu
To sa dá v tomto prípade dvoma spôsobmi. Prvým je posuv beţca posuvného poľa,
kde hodnota najmenšieho posuvu je desatina Volta. Ak by to nepostačovalo pre
obsluhu, je moţnosť napísať hodnotu napätia manuálne do okna nachádzajúceho sa
nad týmto poľom. Tu je však nutné prepočítať si hodnotu napätia na číslo
vzorkovania v rozsahu od 0 do 32000, keďţe s týmito hodnotami priamo pracuje
PLC (v tomto prípade 0 ≈ -5V; 16000 ≈ 0V; 32000 ≈ 5V).
Vzorec na výpočet poţadovanej hodnoty je:

SjF KAVS - PRAT
- 39 -
10
32000*)5(5
x
k
xn (14)
kde 32000
10k (15)
k - konštanta vzorkovania (10 => rozsah vzorkovania napätia,
32000 => rozsah vzorkovania PLC),
n - hodnota, ktorú treba zadať pre dosiahnutie poţadovaného napätia
5 - zabezpečí posuv z rozsahu 0-10 na rozsah -5 – 5,
x - hodnota napätia, ktorá je potrebná (presnosť na stotinách Volta).
Hodnota napätia je zobrazovaná analógovo aj digitálne, teda na ručičkovom
voltmetri a displeji nachádzajúcom sa nad ním.
Signalizácia pohybu je riešená blikaním šípky poţadovanej strany.
Táto časť obsahuje ešte tlačidlo „tla1“ aj s jeho signalizáciou. Tlačidlom sa spúšťa
reléový kontakt motora na začiatku, alebo po jeho vypnutí zopnutím koncových
spínačov. To, či je kontakt rozopnutý, alebo zopnutý, signalizuje program svietením
tlačidla na zeleno (zopnutý), alebo červeno (rozopnutý)
8.3.2 Ovládanie rotácie žeriavu
Obr. 23: ovládanie rotácie

SjF KAVS - PRAT
- 40 -
Uhlová rýchlosť rotácie ţeriavu nie je vzhľadom na prevod, ktorý sa nachádza
v kabíne, veľmi veľká a preto nie je nutné aj tento motorček ovládať analógovo.
Táto časť obsahuje 3 tlačidlá s ich signalizáciou, kde tlačidlá „tla2“ a „tla3“ zapínajú
reléové kontakty motorčeka pre rotáciu v smere, alebo proti smeru hodinových
ručičiek. Tlačidlo „tla4“ rozopína zopnuté kontakty 2 a 3 v prípade, ţe sú zopnuté.
Taktieţ sa zopnuté relé rozopne stlačením protichodného tlačidla, čím sa zároveň
zopne kontakt tohto tlačidla. To, ktorý smer je aktívny, vieme zo signalizácie
tlačidiel (to, ktoré je zopnuté, svieti na zeleno, ináč je červené). Zároveň sa zopne
signalizácia rotácie – vysvieti sa nápis, či je pohyb v smere, alebo proti smeru (ináč
nápisy nie je vidieť) a tieţ bliká šípka daného smeru na zeleno.
Táto časť tieţ obsahuje digitálny a analógový voltmeter, kde sa ale zobrazujú
hodnoty len +5V, -5V a 0V.
8.3.3 Ovládanie navíjania (odvíjania) háku
Podobne ako ovládanie rotácie nie je ovládanie navíjania analógové, len digitálne.
Táto časť ovládania obsahuje dvojicu súbor troch tlačidiel s označením „tla4“ a
„tla5“. Zelené a červené tlačidlá zopínajú (resp. rozopínajú) príslušné reléové
kontakty navíjania, resp. odvíjania lana háku. Samozrejmosťou je farebné rozlíšenie,
teda zelené tlačidlo je spínacie, červené rozpínacie.
Obr. 24: Ovládanie navíjania a odvíjania háku

SjF KAVS - PRAT
- 41 -
Program je ošetrený aj proti protichodným príkazom, keď je napríklad zapnuté
odvíjanie, tak PLC nebude reagovať na prípadný príkaz navíjania, kým sa nevypne
odvíjanie a opačne.
Tlačidlá nad nimi slúţia na jemné nastavenie dĺţky lana – stlačením tlačidla sa
motorček navijaka rozbehne poţadovaným smerom, pustením sa zase analogicky
motorček vypne.
Signalizácia je zabezpečená rozsvietením zopnutého tlačidla a tieţ v signalizačnej
časti obrazovky – blikaním šípky poţadovaného smeru a tieţ rozsvietením nápisu
vedľa nej („navíjanie“ resp. „odvíjanie“).
Obrazovka ovládania obsahuje ešte ďalšie dve dvojice prvkov:
dvojica koncových spínačov, ktoré sú normálne vypnuté (nie je ich vidieť)
a rozsvietia sa keď sú zopnuté, tzn., ţe keď mačka dôjde do koncovej polohy a zopne
pravý spínač, na obrazovke sa automaticky zobrazí signalizácia zopnutia pravého
koncového spínača (čo analogicky platí pre ľavý koncový spínač).
Dvojica tlačidiel štart/stop, ktoré ovládajú celý program ako centrálny štart
a centrálny stop. Kým nie je stlačené tlačidlo štart, model je vypnutý. To tieţ
znamená, ţe v prípade stlačenia tlačidla stop sa všetky pohyby zastavia.

SjF KAVS - PRAT
- 42 -
9 REGULÁCIA KMITOV BREMENA ŽERIAVU
Problematika regulácie:
Pri presúvaní mačky po ramene ţeriavu zotrvačná sila spôsobuje, ţe sa bremeno
rozkýva. Tento jav je v praxi dosť neţiaduci, pretoţe príliš komplikuje a hlavne
spomaľuje riadenie obsluhy ţeriavu, pretoţe sa môţe stať, ţe by kmitajúce bremeno
do niečoho neplánovane narazilo v dôsledku kmitania a mohlo tým spôsobiť veľké
škody. Kmitanie je tým väčšie, čím je väčšia dĺţka lana a tieţ rýchlosť posuvu
mačky.
Kmitanie sa samozrejme po určitom čase (závislom hlavne na maximálnej výchylke
bremena) ureguluje automaticky samo na nulu. Spôsobí to odpor vzduchu a iné
faktory, ktorých pôsobenie nazývame útlmom.
exp
AMPL.1
AMPL.2
A
t
Obr. 25. Závislosť výchylky od času
Na obr. 25 je vidieť tri krivky, pričom krivka s označením „AMPL.1“ je krivkou
ideálneho kyvadla bez pôsobenia odporových síl. „EXP.“ Je exponenciálna krivka
útlmu, ktorá v reáli pôsobí proti pohybu kyvadla, čo ma za následok krivku
„AMPL.2“.
Keďţe je potrebné regulovať kmity bremena, najpodstatnejší snímač pri riešení tohto
problému je snímač uhla a vzdialenosti .
Asi najlepším a najpresnejším spôsobom merania uhla, kde sa môţu dokonca merať
obe veličiny naraz, sú optosnímače. Najskôr bola pouţitá kombinácia infra LED +
fototranzistor, keďţe fototranzistor má z pouţiteľných súčiastok najuţšiu
charakteristiku. Ten sa však ukázal podľa nameraných kriviek nakoniec ako

SjF KAVS - PRAT
- 43 -
nevhodný kvôli veľmi veľkej závislosti na súosovosti pouţitých súčiastok a citlivosti
na slnečné svetlo, aj keď obsahoval filter.
Obr. 26: Smerová charakteristika fototranzistora
[16]
Fototranzistor sa preto nakoniec vymenil za fotodiódu. Tá sa ukázala ako vhodná,
pretoţe kaţdému uhlu a kaţdej vzdialenosti sa z grafu dala jednoznačne prideliť
hodnota napätia generovaného na dióde.
Obr. 27: smerová charakteristika fotodiódy
[17]

SjF KAVS - PRAT
- 44 -
Obr. 28: Schéma zapojenia optosnímača
Meranie bolo robené pre zjednodušenie na simulovanom zapojení ţeriavu (podľa
obr. 28), kde ako zdroj svetla bola pouţitá infračervená LED pri maximálnom prúde
20mA. Rozsah meraných uhlov bol ±25°, aj keď v reáli je predpokladaná maximálna
amplitúda iba cca. ±10°.
Regulácia kmitov sa dá zabezpečiť dvoma základnými spôsobmi:
1) Postupným spomaľovaním motora – Je moţné riadiť pouţitím PD, resp. PID
regulátora. Je však nutné dopredu poznať počiatočné miesto, teda kde sa mačka
nachádza na začiatku, miesto koncové, teda kam sa má mačka dostať, dĺţku lana,
hmotnosť záťaţe a pod.
Podobný systém eliminácie kmitov bremena uţ bol riešený Prof. Ing. Michalom
Valáškom, DrSc. z ČVUT Praha pre mostový ţeriav, kde toto riešenie má vlastný
patent v Českej republike číslo PV 3661/96.
Základnou podmienkou realizácie systému pre elimináciu kmitov bremena je
inštalácia vektorovo riadených meničov frekvencie.
Podstata spočíva v tom, ţe do riadiaceho počítača sú zavedené poţiadavky obsluhy
ţeriavu, t.j. smer pojazdu mačky, smer pohybu zdvihu, či dĺţka lana, na ktorom je
zavesené bremeno. Na základe týchto informácii je počítačom generovaná taká
rozjazdová, resp. dojazdová rampa, vo forme analógového signálu, pri ktorej
nedochádza ku kývaniu bremena. Tento signál je riadiacim signálom rýchlosti
meničov frekvencie pojazdu mačky, či ramena. Riadiaci systém eliminácie kmitania
bremena reaguje na povely obsluhy tak, aby pri kaţdej zmene rýchlosti došlo ku
stabilizácii rýchlosti bremena oproti pohybovej časti ţeriavu.
[18]

SjF KAVS - PRAT
- 45 -
2) Sústavným protipohybom mačky oproti kmitu bremena – ak dokáţeme v kaţdom
časovom okamihu správne identifikovať všetky potrebné veličiny kmitania, ako je
maximálna amplitúda kmitu (tieţ okamţitý uhol), uhlovú rýchlosť bremena a dĺţku
lana s hmotnosťou bremena, o ktorej sa ale predpokladá, ţe sa nebude počas
regulácie meniť, je moţné vypočítať a analógovo riadiť napätie motora a tým jeho
pohyb tak, aby sa v čo najkratšom moţnom čase výchylka bremena uregulovala na
nulovú hodnotu.
Teoreticky by optimálne riešenie bolo, keby bola krivka posuvu mačky vo fázovom
posune o 180° oproti krivke kmitania bremena mačky. To však nie je reálne, preto sa
dá do úvahy brať fázový posun 90°. V okamihu, keď kmit bremena dosiahne
maximálnu výchylku, začne sa pohybovať mačka proti pohybu bremena
poţadovanou rýchlosťou a o poţadovaný posuv tak, ţe keď dosiahne bremeno
maximálnu výchylku uhla na druhej strane, motor sa zastaví a začne sa zas
pohybovať proti spätnému pohybu bremena a tento regulačný pohyb sa bude
opakovať aţ dovtedy, kým nebude výchylka v poţadovaných medziach, resp.
nulová.

SjF KAVS - PRAT
- 46 -
Záver
Riadenie ţeriavu je vec pomerne zloţitá hlavne na presnosť, rýchlosť či efektivitu
práce. My sme sa zaoberali riadením, ktoré je postačujúce pre ovládanie modelu
ţeriavu ako školskej pomôcky, to znamená, ţe presnosť a rýchlosť nie je
podmienená nejakými rizikami havárie s inými strojmi, či budovami a slúţi skôr ako
výuková moţnosť pre zdokonalenie sa v práci s programami od firmy Rockwell
Automation a jej divízie Rockwell Software, teda hlavne RS Logic 500 a RS View
32. Výsledkom je isté riešenie, ktoré však určite nie je len jediné moţné a je skôr
závislé na poţiadavkách zákazníka a projektanta (v našom prípade od študenta), čo
je pre neho prioritou, ale tieţ jeho fantázií a inovácii.
Tieţ sa dá samozrejme dopĺňať o mnoţstvo ďalších funkcií, ako napr. presné
programovanie posuvu mačky, kde by bolo samozrejme ešte nutné doplniť model
o presné snímače polohy a pod.
Nedoriešeným bodom v našom prípade ostáva regulácia kmitov bremena ţeriavu,
ktorý sa počas práce na tejto diplomovej práci ukázal ako veľmi obšírny a zloţitý, no
stále riešiteľný za podmienok vyriešenia problémov, ktoré sa nám vyriešiť
nepodarilo, či uţ z časových dôvodov, alebo dôvodov veľkej zloţitosti problematiky.
Pre budúcnosť by som odporúčal sa k tejto práci moţno vrátiť a na jej základoch,
kde uţ nie je potrebné riešiť problémy riadenia a prerábania modelu veţového
ţeriavu a prípadne dokončiť bod regulácie kmitania, keďţe tento problém, aj keď uţ
bol moţno viac krát riešený a vyriešený (napr. spomínaným patentom profesora
Valáška), je stále aktuálny a jeho moţno lepšie riešenie potrebné, keďţe skracovanie
doby presunu materiálu ţeriavom z jedného miesta na druhé, čo je základnou
poţiadavkou na ţeriavy, šetrí náklady na celú stavbu i rýchlosť jej budovania.








