Adapt ive Solution of Viscous Aerodynamic Flows Using Unstructured Grids Paul Charles Walsh A thesis submitted in conformi@ with the requirements for the degree of Doctor of Philomphy Graduate Department of Aerospace Science and Engineering University of Toronto @Copyright by Paul Chsrles Walsh 1998
Transcript
Adapt ive Solution of Viscous Aerodynamic Flows Using Unstructured Grids
Paul Charles Walsh
A thesis submitted in conformi@ with the requirements
for the degree of Doctor of Philomphy
Graduate Department of Aerospace Science and Engineering
University of Toronto
@Copyright by Paul Chsrles Walsh 1998
National Library Bibiioîhèque nationale du Canada
Acquisitions and Acquisitions et Bibliographie SeMces services bibliographiques
395 WeUingbDn Street 395. rue Wellington OttawaON K 1 A W Ottawa ON K1A OCJ4 canada CaMda
The author has granted a non- L'auteur a accordé une licence non exclusive licence allowing the exclusive permettant à la National Library of Canada to Bibliothèque nationale du Canada de reproduce, loan, distribute or sel1 reproduire, prêter, distribuer ou copies of this thesis in microfoq vendre des copies de cette thèse sous paper or electronic formats. la forme de microfiche/nlm, de
reproduction sur papier ou sur format électronique.
The author retains ownership of the L'auteur conserve la propriété du copyright in this thesis. Neither the droit d'auteur qui protège cette thèse. thesis nor substantial extracts ~ o m it Ni la thèse ni des extraits substantiels may be printed or otherwise de celle-ci ne doivent être imprimés reproduced without the author's ou autrement reproduits sans son permission. autorisation.
Adaptive Solution of Viscous Aerodynamic Flows Using Unstructured Grids
Paul Charles Walsh
University of Toronto, Institute for Aerospace Studies
Doctor of Philosophy, 1998
Abstract
Unstnictured grids are used in numericd models applied to aerodynamic design
for their ability to conform easily to complex geometries. Their lack of rigid connectivity
d o m the grid generation process to be highly automated, reducing the expertise needed.
The ~n~tnict~red grid is idedy suited for bcal refinement basecl on the flow field solu-
tion, providing an opportunity for faster, less memory intensive operation for a specific
level of accuracy. The purpose of this research is to develop such an algorithin using
solution-adaptive unstmctured triangular grids to solve the compressible Navier-Stokes
equations on two-dimensiond airfoi1 profiles. The basic solver utilizes a finite-volume
methodology with Runge-Kutta time rnarching to produce steady-state solutions. An
improved artificid dissipation method is developed that provides reduced grid sensitiv-
ity and improved accuracy for high-aspect-ratio grids. The solution-adaptive gridding
method identifies under-resolved regions of the solution through an adaptation parameter
based on nomalized grid edge différences of the flow field variables. New grid nodes are
added in regions where the magnitude of the adaptation parameter is greatest, yielding
a local grid refhement. The hi&-aspectratio nature of the grid in viscous regions of the
flow is preserved after adaptation through the development of a solutiondependent retri-
mgdation routine. Several test cases on laminar and turbulent flows are presented that
demonstrate the performmce of the algorithm. It is shown that the adaptation configu-
ration that achieves the greatest improvement in remlution uses an adaptation parameter
consisting of a combination of Mach number and densi@ edge differences, with 55% of the
adapted nodes added in the first pass and 45% in the second to yield a four-fold increase
in the number of grid nodes. The test cases also demonstrate that the adaptation rou-
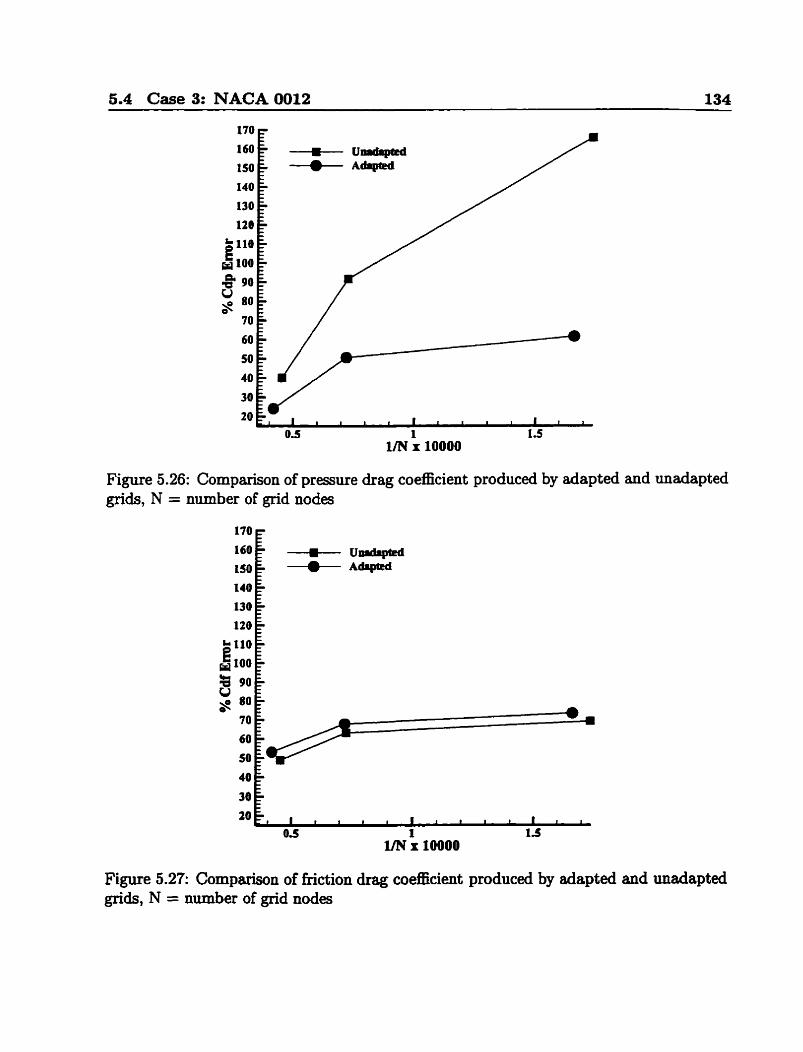
tine is capable of providing at least a 40% reduction in Mt and pressure drag coefficient
errors over d flow regimes compared to solutions obtained on unadapted grids with an
equivalent number of nodes. The effectiveness of the algorithm as a design tool is realized
in a final cornparison of an adapted solution to experimentally determineci results on a
cornplex three-element airfoil configuration.
Acknowledgement s
1 wodd like to express my gratitude to my supervisor Dr. D.W. Zingg for his support
and inspiration throughout the development of this research and in the writing of this
thesis. 1 would also like to thank the other members of my doctoral cornmittee, Dr. J. J.
Gottlieb and Dr. J.S. Hansen for th& efforts and suggestions.
1 also wish to extend m y thanks to the N a t d Sciences and Engineering Re-
search Councü of Canada, the Goveniment of Ontario, and the University of Toronto for
providing funding which made this work possible.
During my studies at the Universi@ of Toronto my family and &ends provided
ready encouragement, which was indispensible in the completion of this research. To
them 1 offer my gratitude and appreciation. Findy, I would like to extend my sincerest
appreciation to Ruth Boehme for her unflagging support and assistance in the preparation
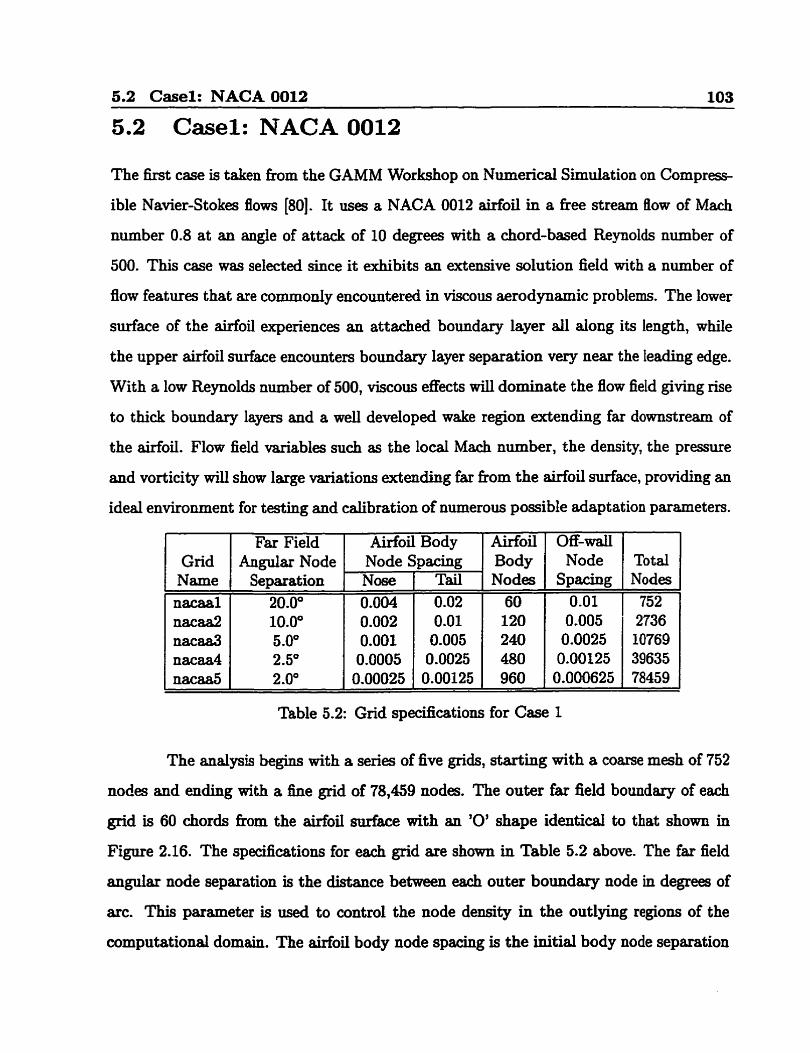
2.5 Mach number profile at ~0.70 on the upper airfoil surfme . . . . . . . . . 46
2.6 Temperature profile at z=0.?0 on the upper airfoi1 surf'hce . . . . . . . . . 46
2.7 Enlargement of the temperature profile near the airfoil d a c e . . . . . . . 47
2.8 Density prose at -0.70 on the upper airfoil d a c e . . . . . . . . . . . . 47
2.9 Pressure profile at x=0.70 on the upper aidoil surface . . . . . . . . . . . 48 2.10 Example of a high and low fiequency error on a 1-D grid showing the
appwance of the low frequency error after transfer to the coarse grid . . . 52
2.11 The saw-tooth multigrid cycle development on a series of three gr&. . . . 54
2.12 Portion of a sample coarse and h e grid showing overlapping triangles . . . 55
2.13 Airfoil d a c e nodes showing Steiner vectors and gradations of off-wall
2.14 Partidy completed grid at the trailing edge of an airfoi1 showing the ad-
vancing &ont after having completed the high-aspect-ratio region . . . . . 61 2.15 The complete grid near the traüing edge of an airfoi1 before smoothing . . 62 2.16 The complete grid near the trailing edge of an airfoil after smoothing . . . 63
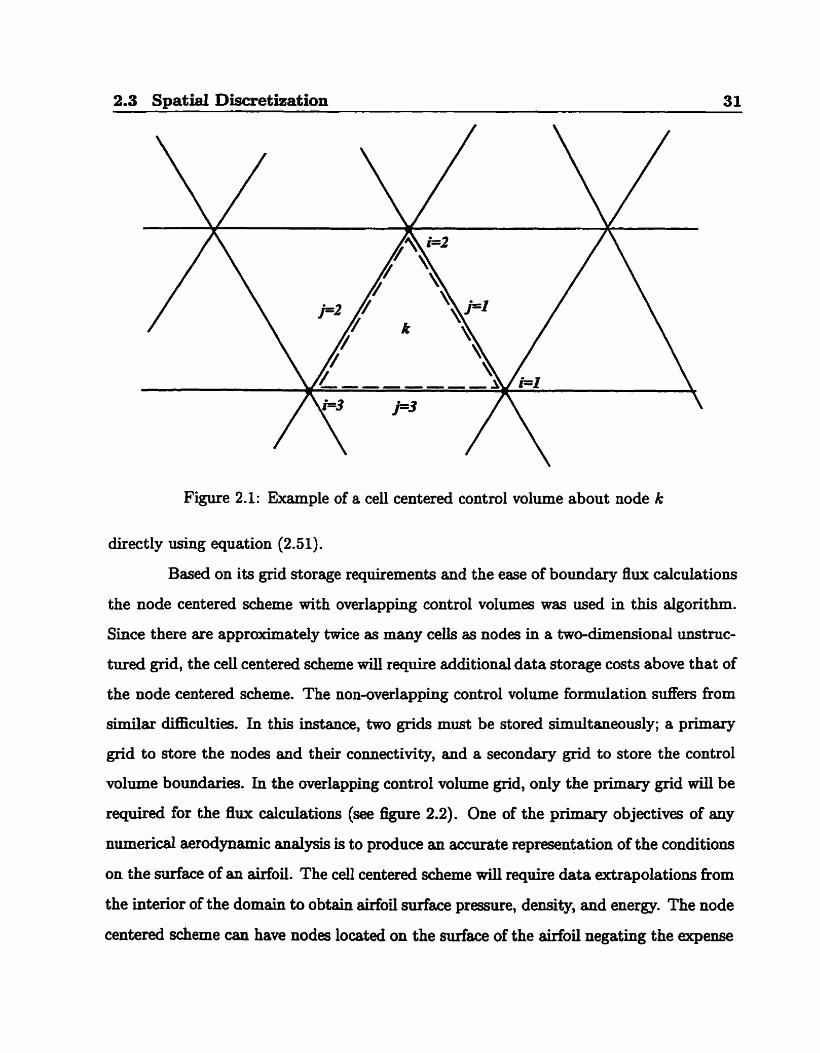
Arbitrary control volume about a central node k, with neighbour nodes i
fiom 1 to n, and boundary edges j numbered 1 to m . . . . . . . . . . . . 70 Typical stretched control volume with stretching vector and reference angle
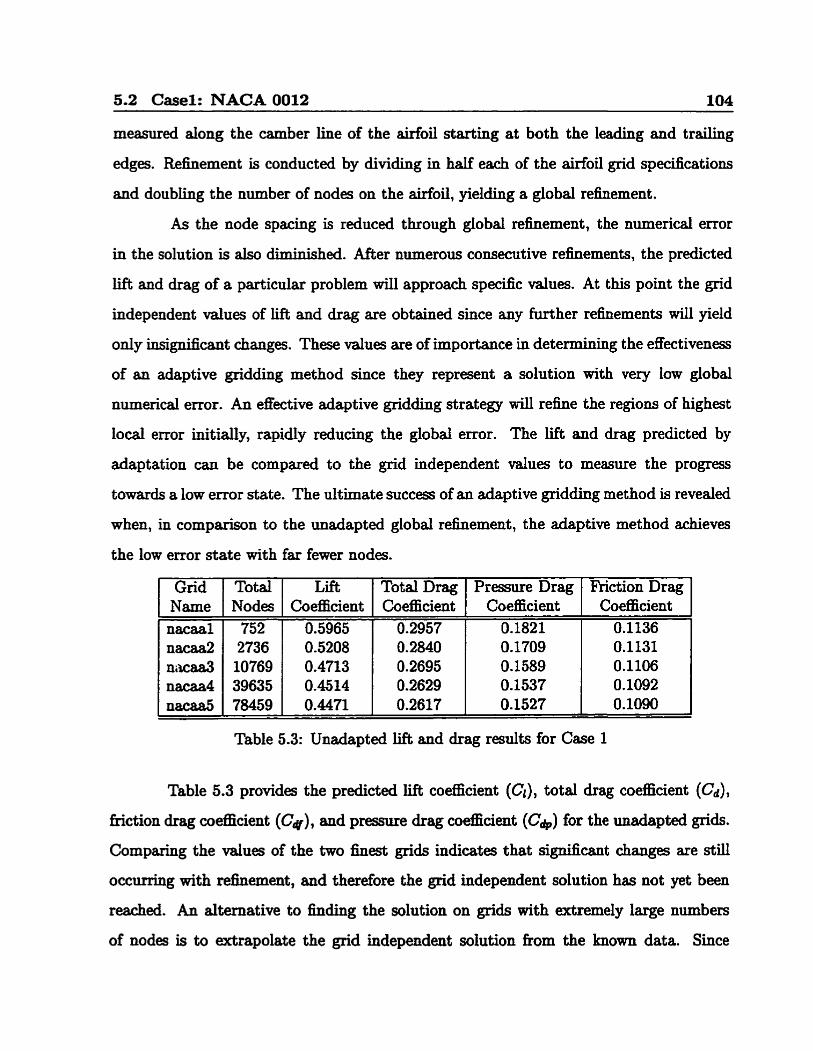
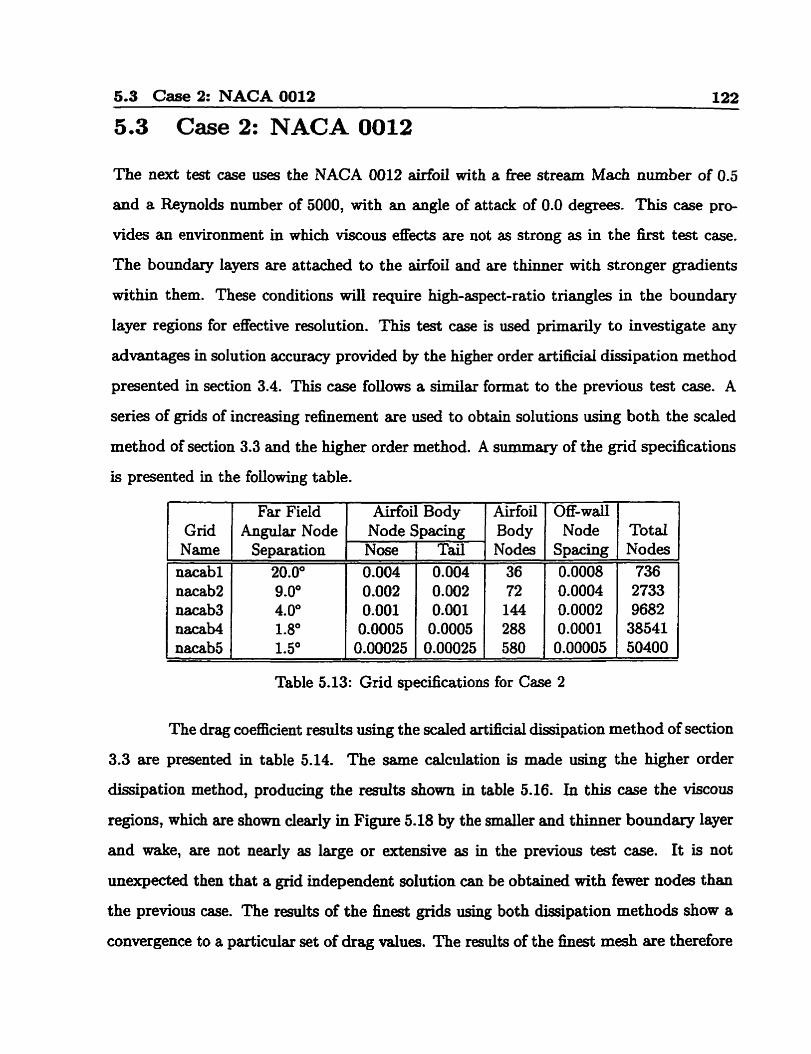
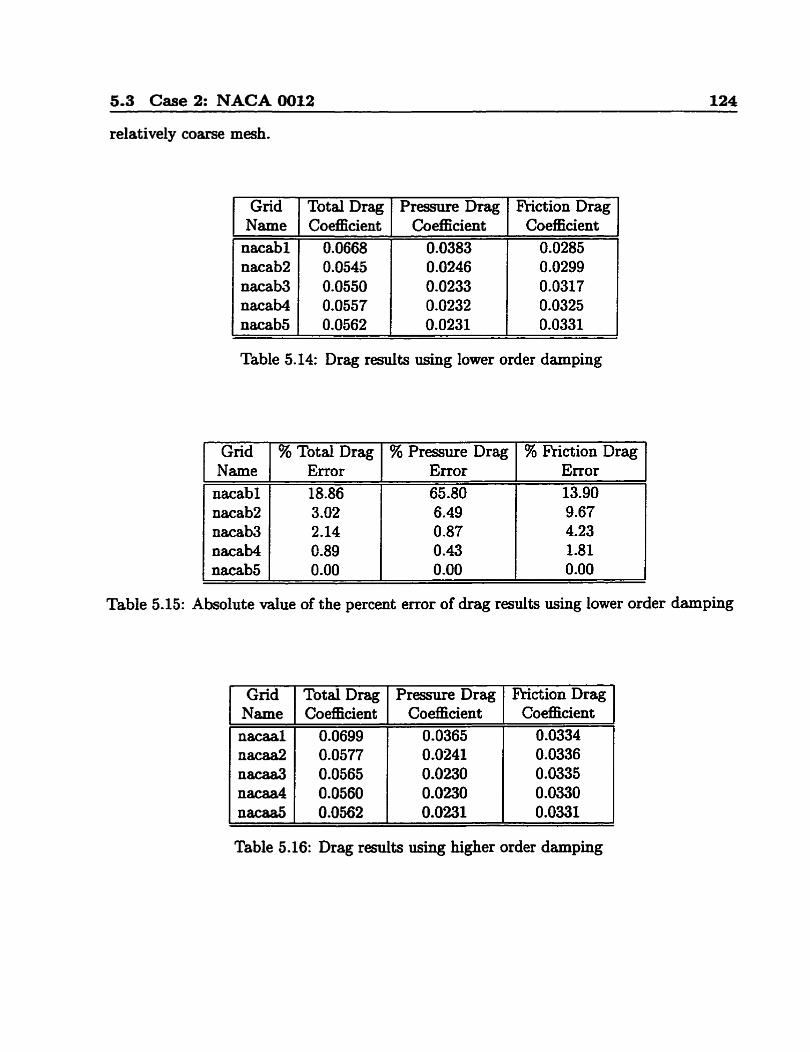
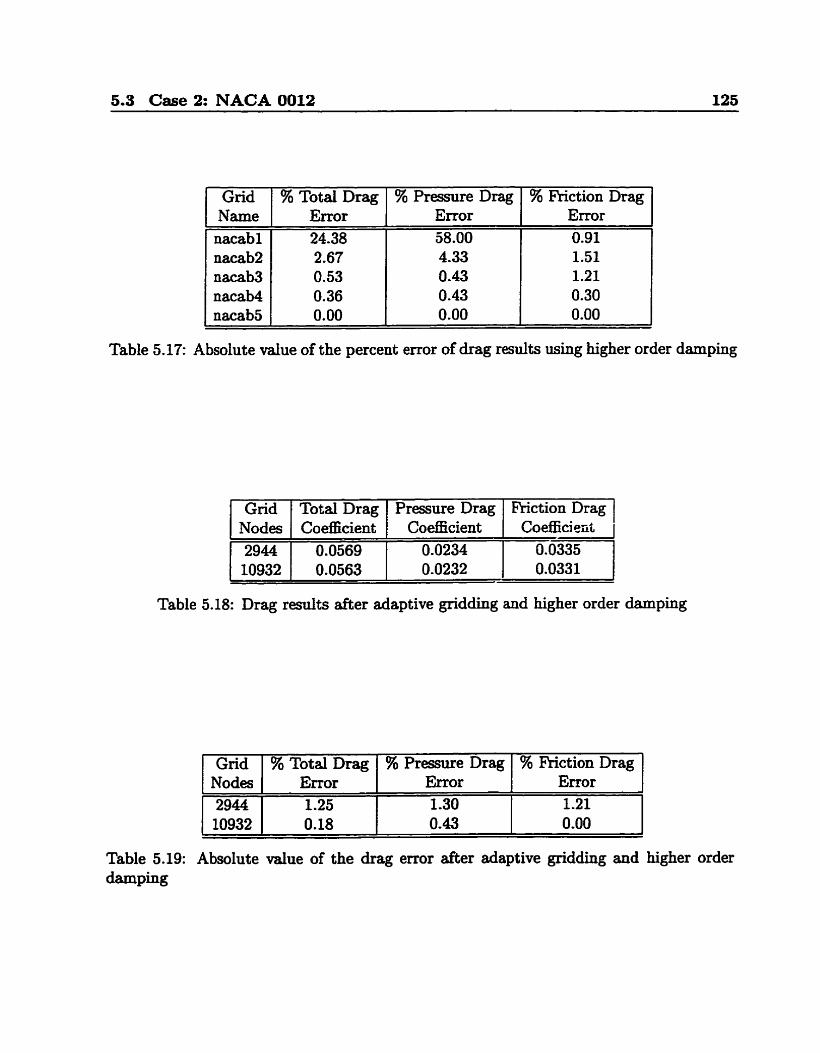
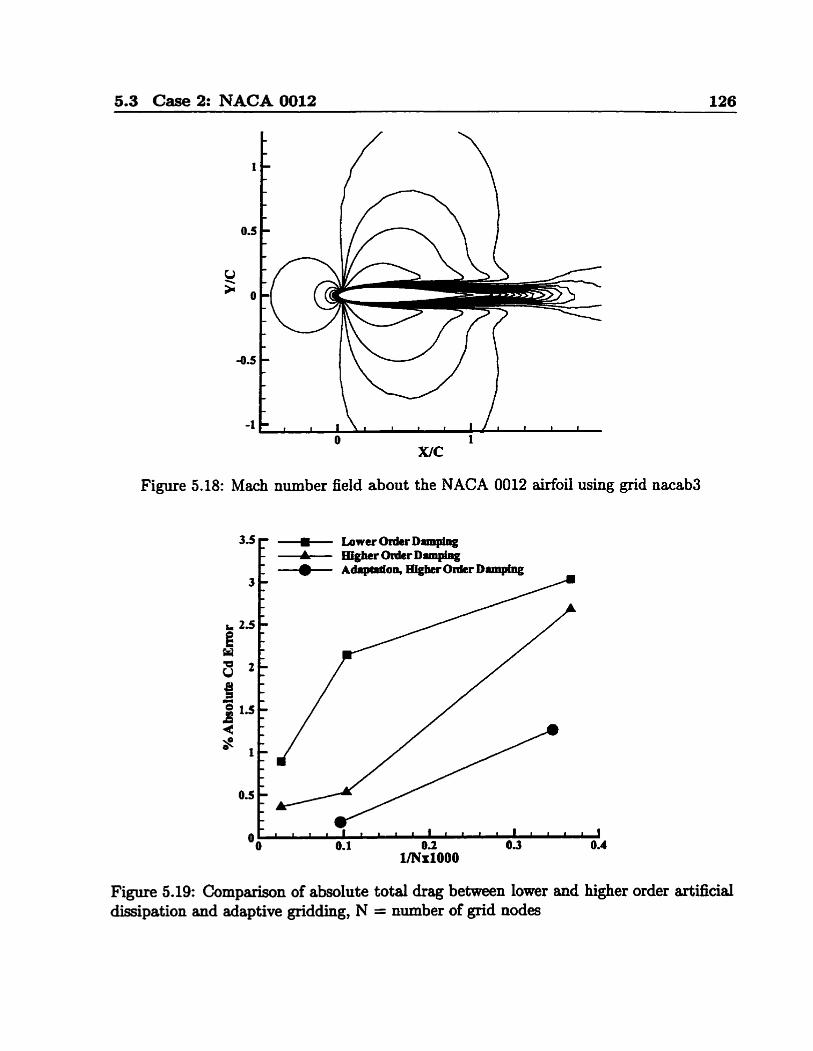
5.18 Mach number field about the NACA 0012 airfoil using grid nacab3 . . . . 126 5.19 Cornparison of absolute total drag between lower and higher order artificial
. . . . . . . dissipation and adaptive gridding. N = number of grid nodes 126
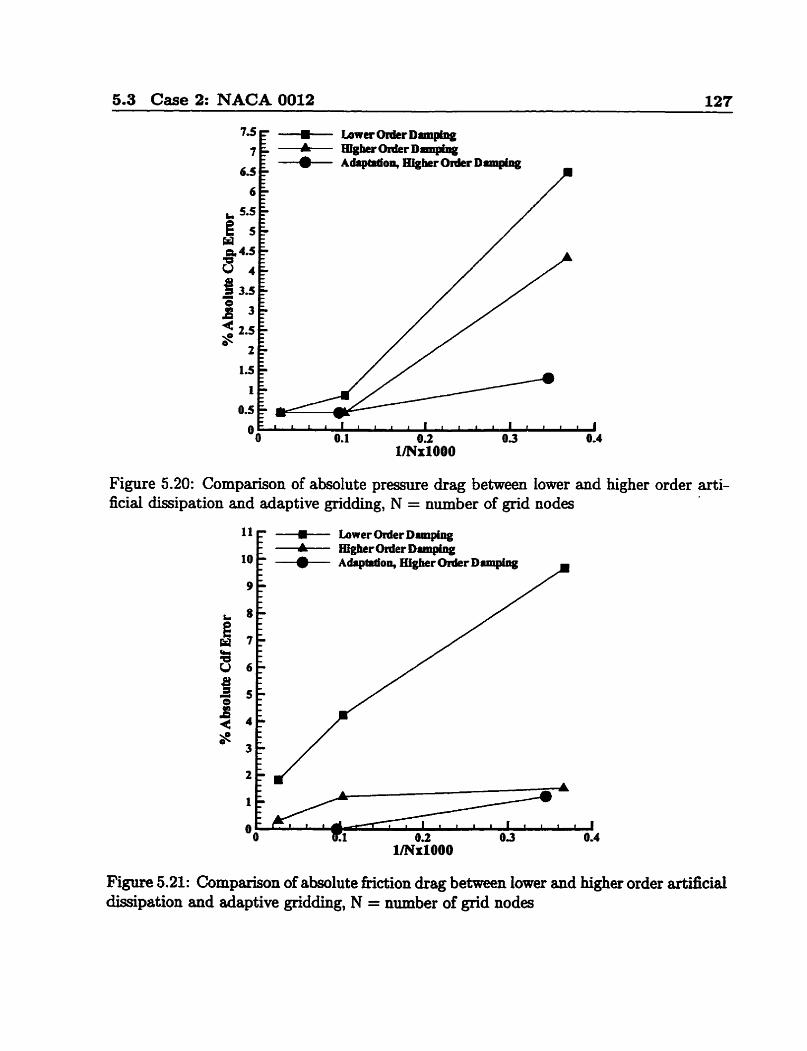
5.20 Comparison of absolute pressure drag between lower and higher order ar-
tificiai dissipation and adaptive gridding. N = number of grid nodes . . . 127 5.21 Cornparison of abso1ute fnction drag between lower and higher order arti-
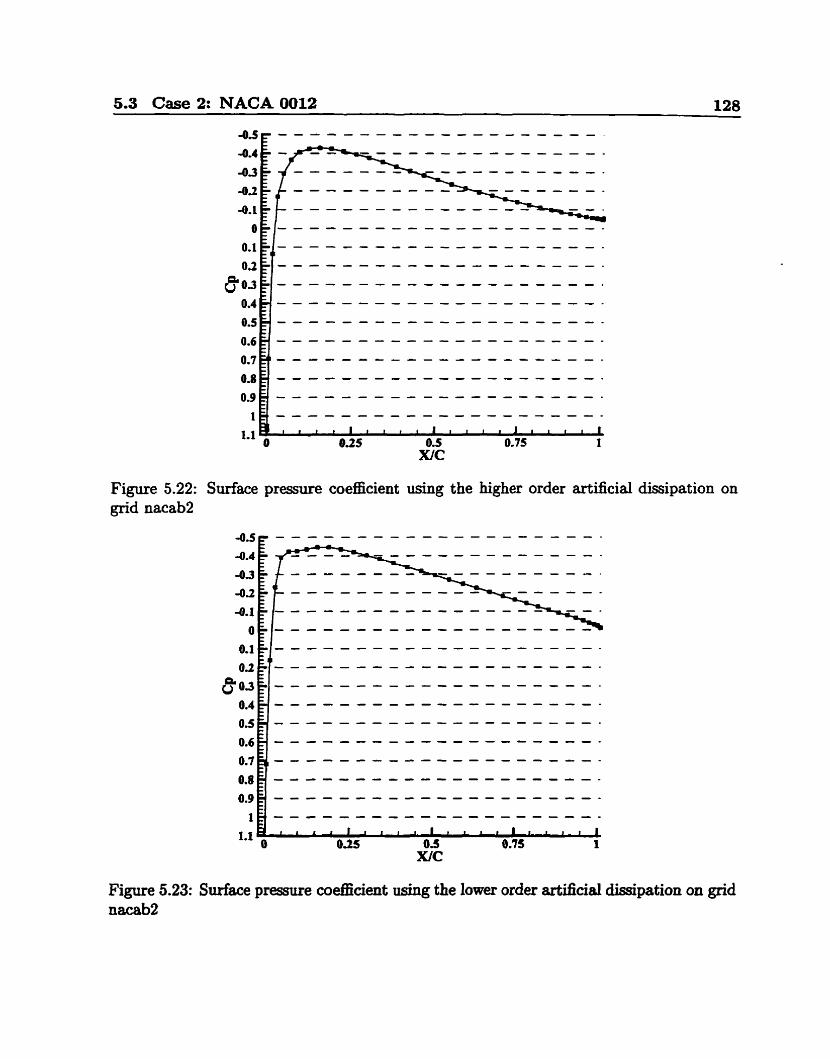
ficial dissipation and adaptive gridding. N = number of grid nodes . . . . 127 5.22 Surface pressure coefficient using the higher order artificial dissipation on
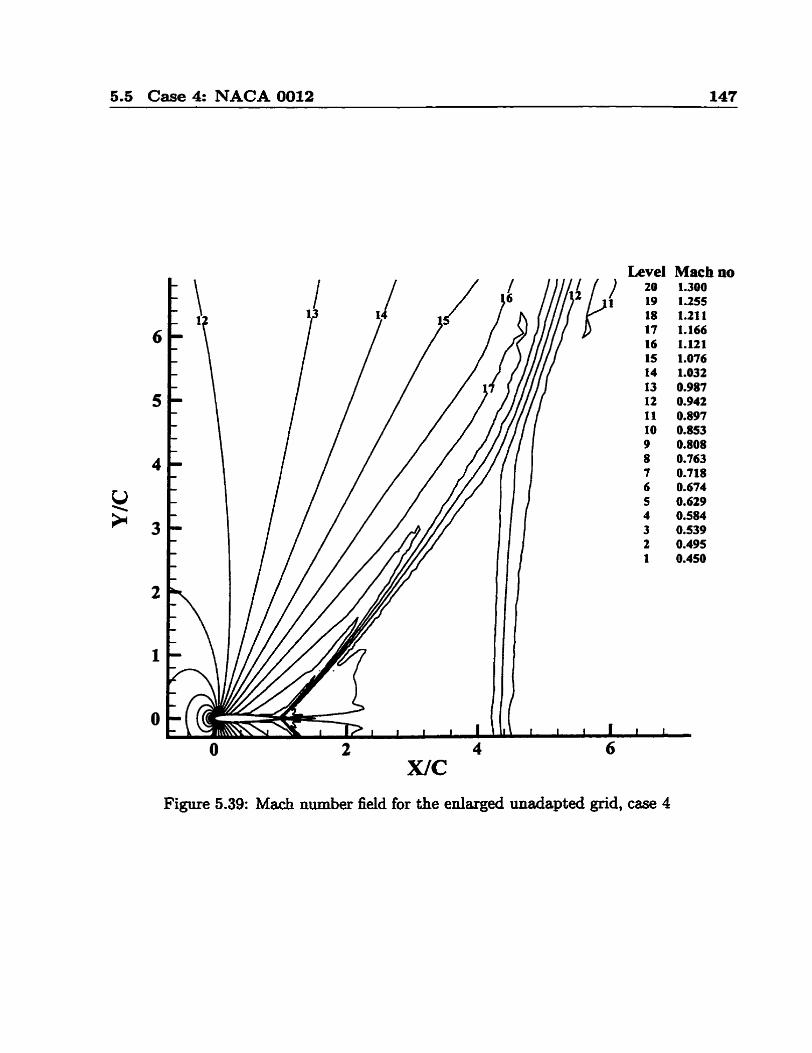
. . . . . . . . . 5.39 Mach number field for the enlargecl unadapted grid. case 4 147
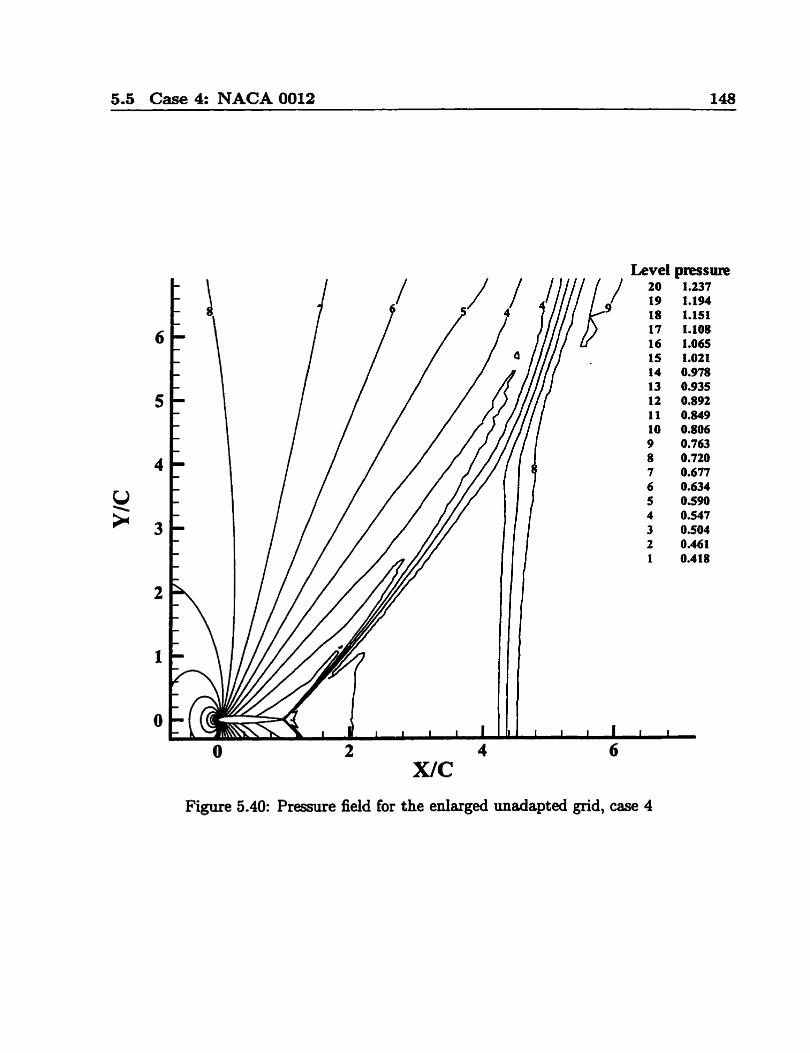
. . . . . . . . . . . . 5.40 Pressure field for the enlarged unadapteci grid. case 4 148
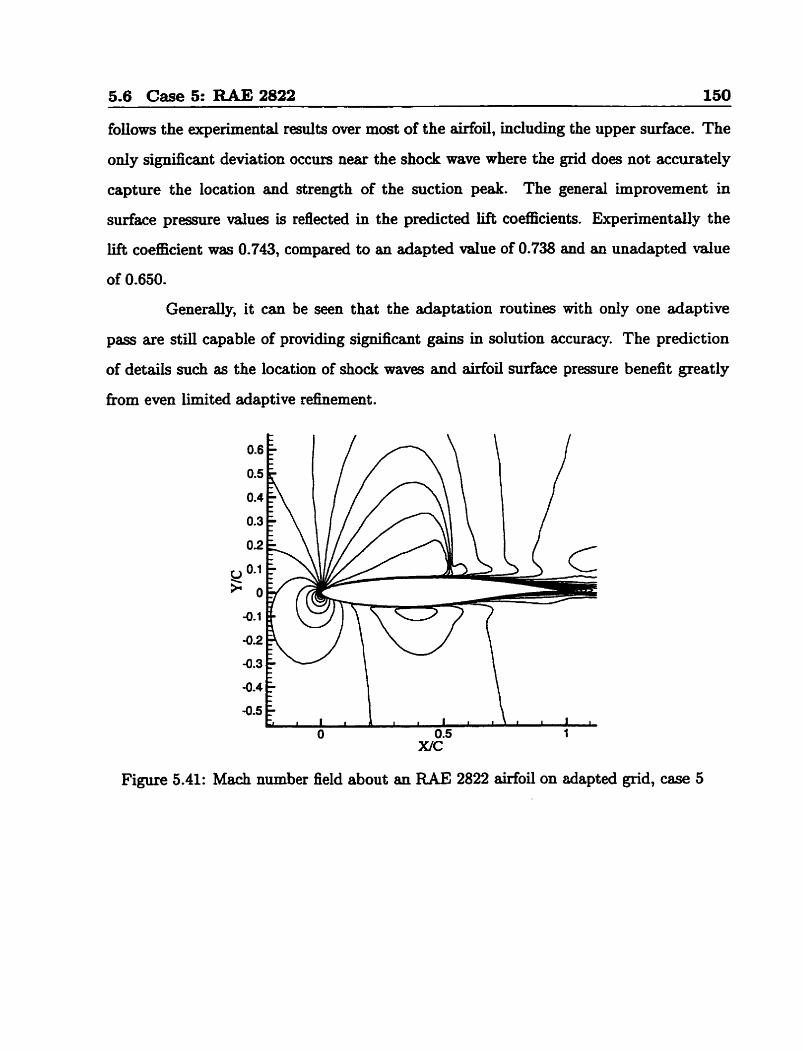
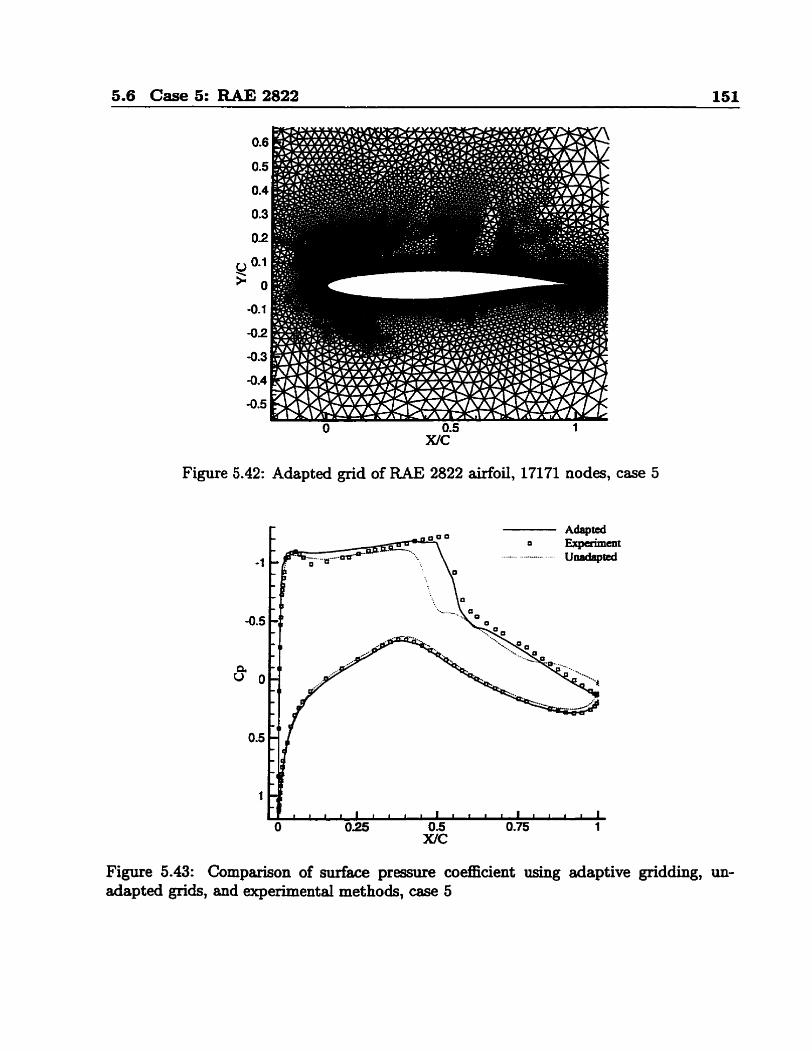
5.41 Mach number field about an RAE 2822 sirfoil on adapted grid. case 5 . . 150 5.42 Adapted grid of RAE 2822 aidoil. Inn nodes. case 5 . . . . . . . . . . . 151
5.43 Cornparison of d & c e pressure coefficient using adaptive gridding, un-
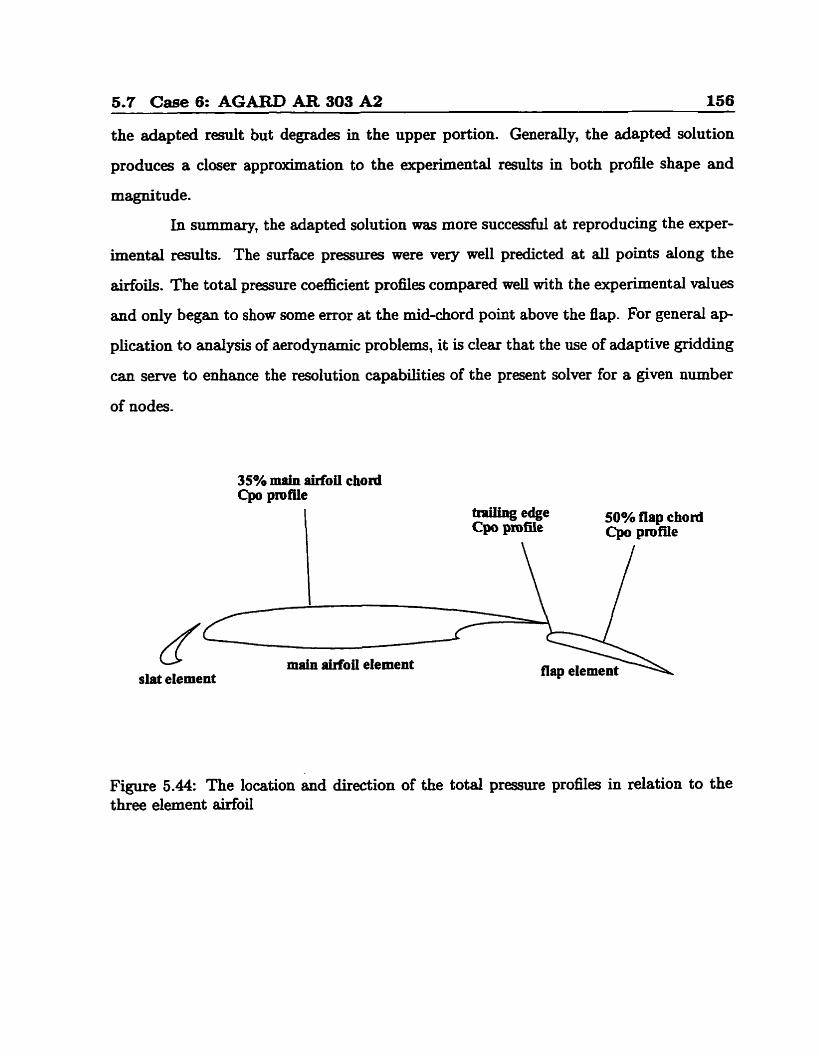
adapted grids, and experimental methods, case 5 . . . . . . . . . . . . . . 151 5.44 The location and direction of the total pressure profiles in relation to the
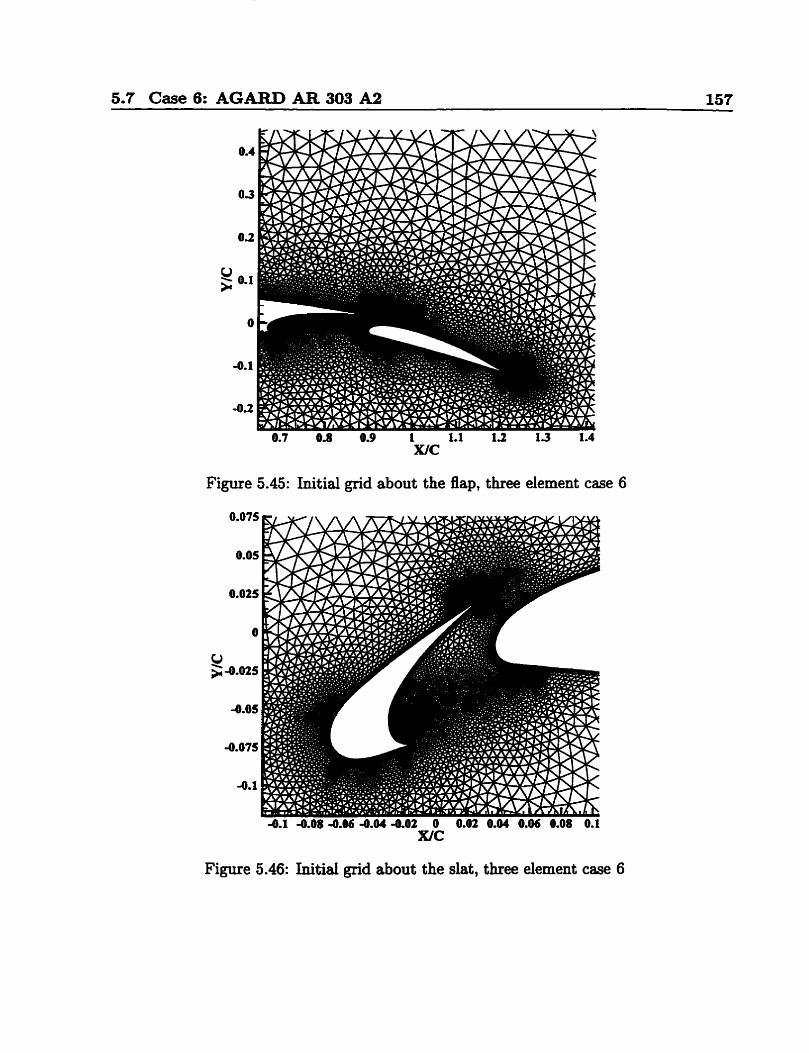
three element airfoil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156 5.45 Initial grid about the flap, three element case 6 . . . . . . . . . . . . . . . 157
5.46 Initid grid about the slat, three element case 6 . . . . . . . . . . . . . . . 157
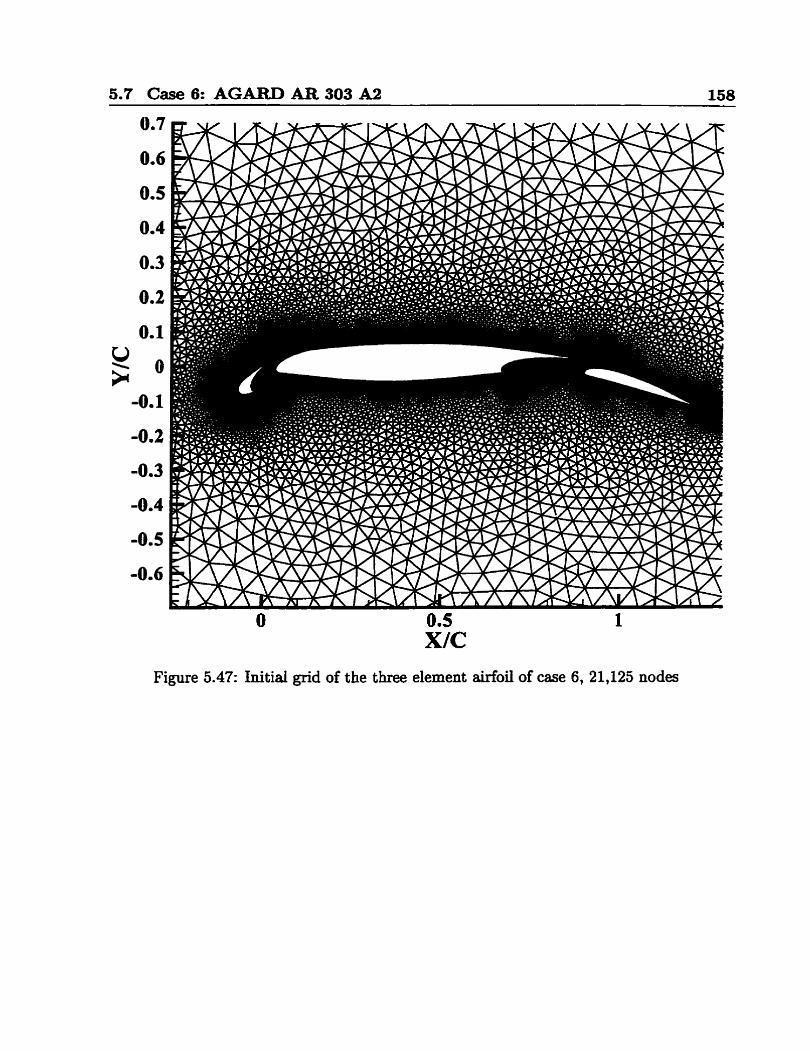
5.47 Initial grid of the three element airfoil of case 6, 21,125 nodes . . . . . . . 158
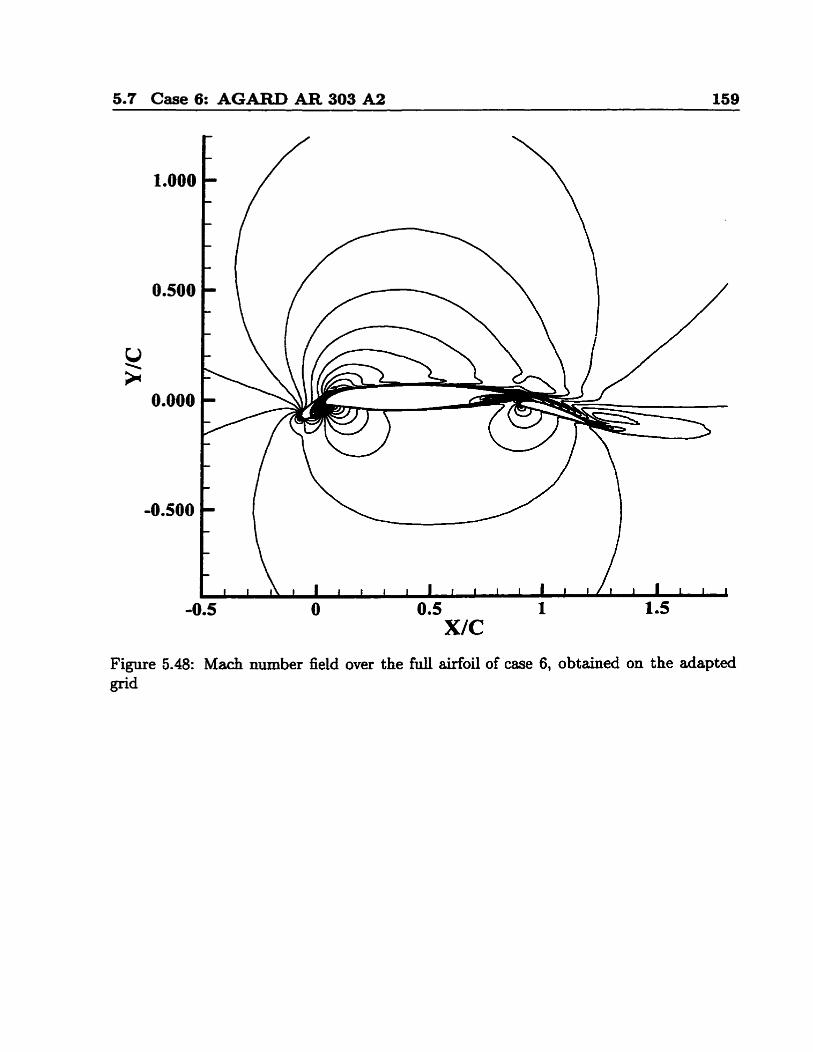
5.48 Mach number field over the fdl airfoi1 of case 6, obtained on the adapted
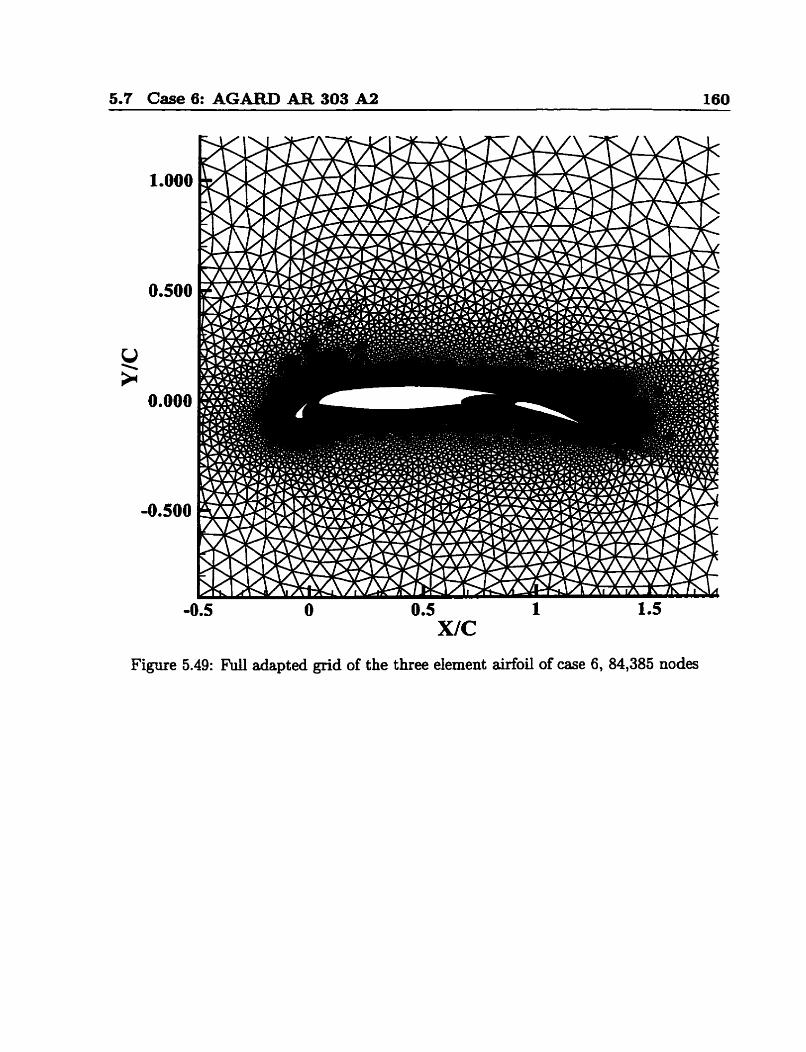
grid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159 5.49 M adapted grid of the three element airfoil of case 6, 84,385 nodes . . . 160
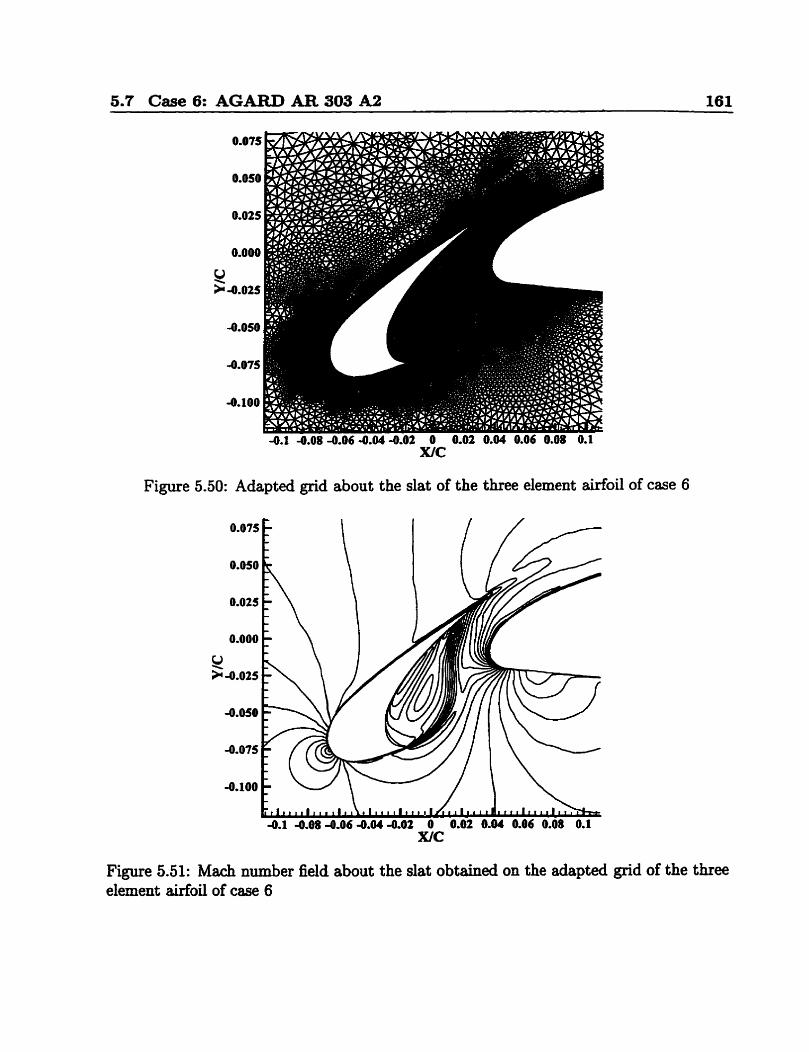
5.50 Adapted grid about the slat of the three element airfoil of case 6 . . . . . 161 5.51 Mach number field about the slat obtained on the adapted grid of the three
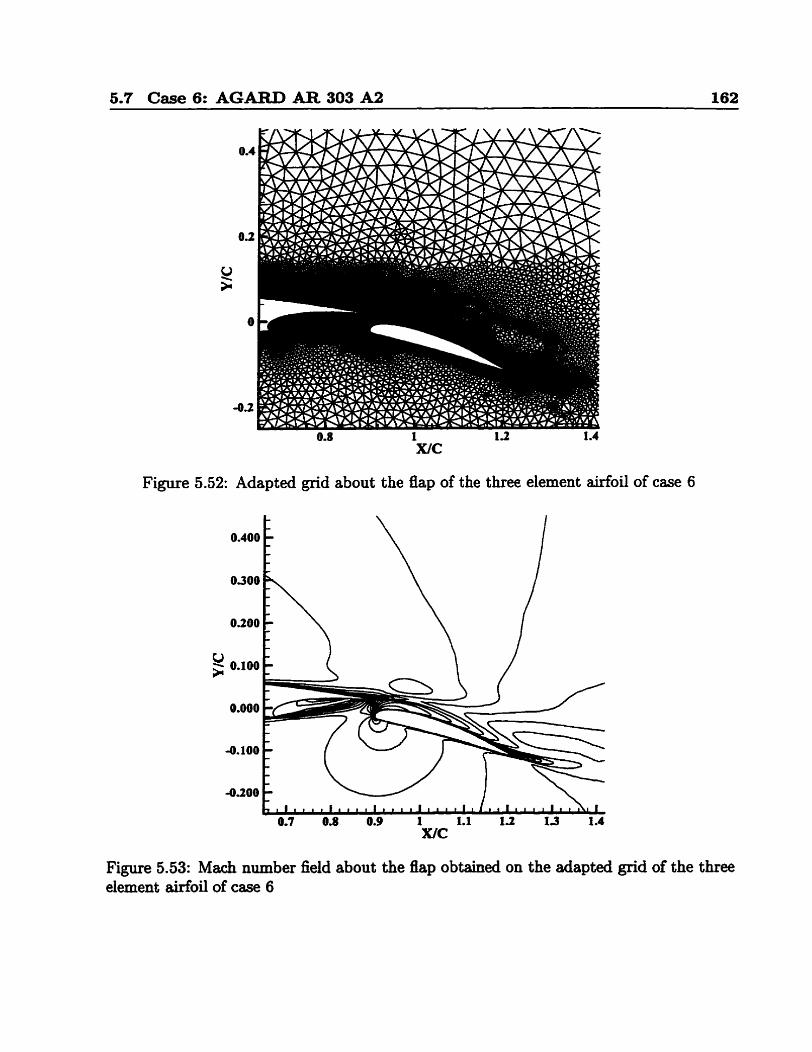
element airfoil of case 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161 5.52 Adapted grid about the flap of the three element airfoil of case 6 . . . . . 162 5.53 Mach number field about the flap obtained on the adapted grid of the three
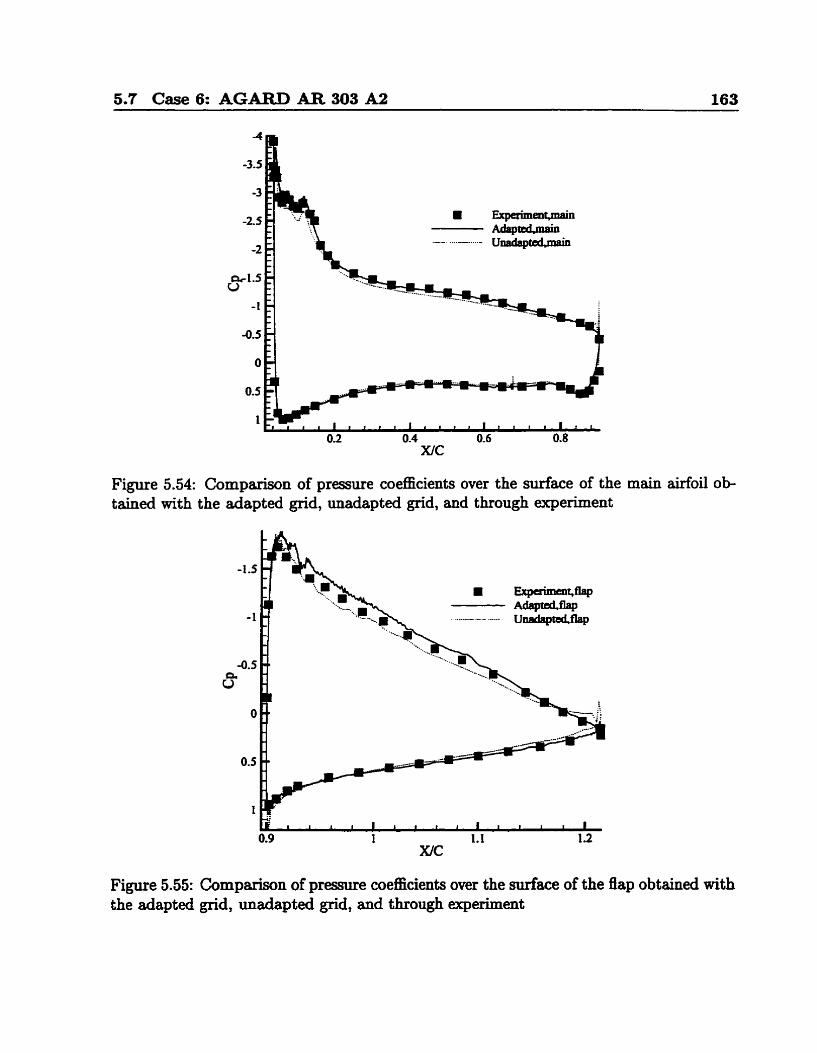
element airfoil of case 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . 162 5.54 Cornparison of pressure coefficients o w the sudace of the main airfoil
obtained with the adapted grid, unadapted grid, and through experiment - 163
5.55 Comparison of pressure coefficients over the sudace of the flap obtained
with the adapted grid, unadapted grid, and through experiment . . .. . . . 163
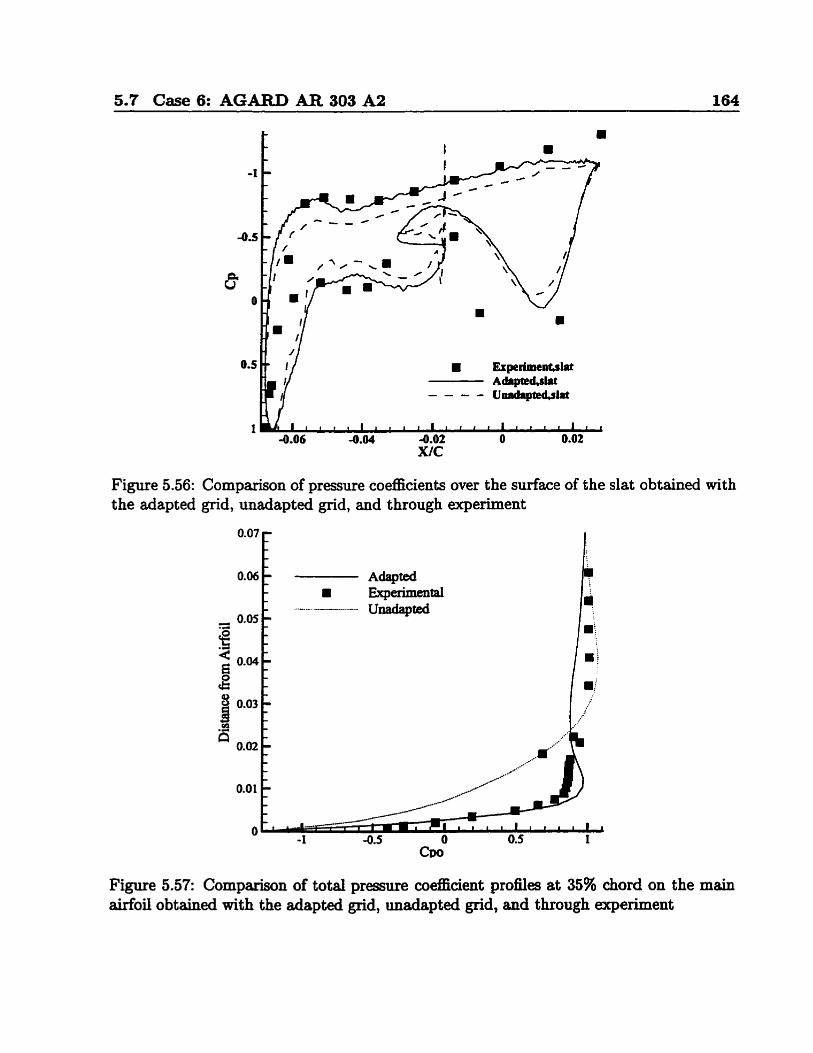
5.56 Comparison of pressure coefficients over the surface of the slat obtained
with the adapted grid, unadapted grid, and through expriment . . . . . . 164
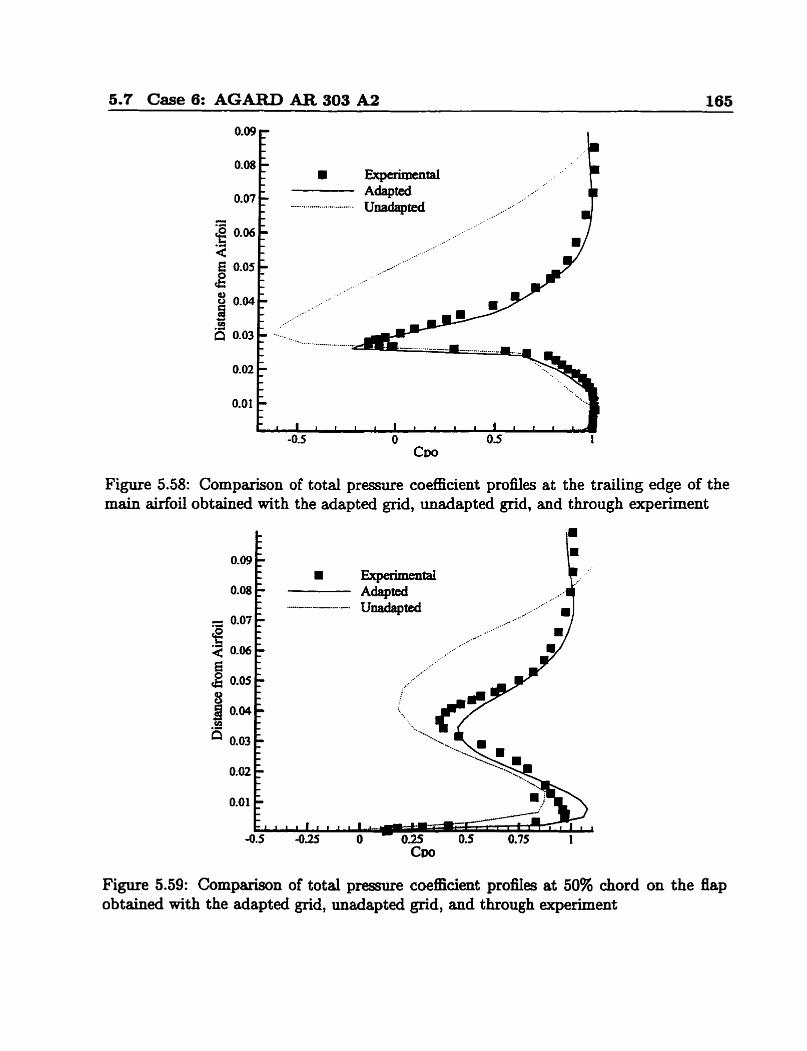
5.57 Comparison of total pressure coefficient profiles at 35% chord on the main
Mail obtained with the adapted grid, anadaptecl grid, and through exper-
The fiee stream velocity components are determined fkom the angle of attsck
incident on the airfoil a, and the free stream Mach nurnber hioo both provideci to the
algorithm by the user.
uoo = M, cos a! v, = M, sin a. (2.64)
The pressure, density, and sound speed in the fiee stream are obtained fiom equations
(2.9,2.15,2.18,2.19) and by specifying p = p, and p = p, to yield,
Poo Poo=- - Poo - 1 -1 P m = - - - POO pooam
The kee stream total energy term is found kom equation (2.12) and the previously de-
terminecl d u e s of p,,u,,v, ,p, through,
Poo 1 E, = + -(uL + vm). - 2
The free stream total enthalpy (H,)is found fkom E,, p,, and p, using,
Pm H,=E,+-- Poo
2.5.2 Far-Field Boundary Conditions
As aircraft wings pass through the atmosphere, the aVtlow about thern is disturbed by
their presence. The domain over which this disturbance is significant c m extend a consid-
erable distance from the aidoil. Since numerical models are applied over finite regions, an
outer boundary must be placed on the computational domain. The distance of the outer
fm-field boundary fiom the aidoil and the type of boundary condition applied there can
have a significant influence on the lift and drag compnted at the aidoil surface. Pulliam
[65] conducted a numerical investigation to determine what effect the outer boundq
location had on the lift coefficient of a single element NACA 0012 airfoil. Freestream
conditions were applied at the outer boundary of a stnictured grid while the location of
the boundary was altered by successive r e m d of the outer mesh rings. This procedure
2.5 Boundarv Conditions 39 -- -- -
maintained a constant grid spacing for each case studied, dowing the effects of the outer
boundary location to be isolat&. What was shown is that the lift coefficient was adversely
affecteci by the location of the outer boundary up to the point where it was about 100
chords from the d a c e of the aidoil.
The implication of this result is that if fieestream conditions are to be imposeci a t
the outer fm-field boundary of a grid, its distance from the airfoil surface must be consid-
erable if performance characteristics are to be unaffected. Placing the far-field more than
100 chords from the airfoi1 sUTface requires either a large number of nodes in the outer
regions near the boundary or very stretched c h , both of which rnay be detrimental to
the performance of the algorithm. Additional nodes in the fax-field require greater com-
putational resources, while stretched c e h may lead to a degradation of solution accuracy.
An alternative method is to impose a correction on the far-field fiee stream conditions
in order to simulate the &ect of a larger domain had it been present. This allows the
far-field boundary to be rnoved closer to the airfoil without any l o s of accuracy. Salas et
al. [66, 671 provide a correction in the form of a velocity perturbation added to the free
stream velocities u ~ , v,. The perturbation velocities are denved assuming the effects of
the lifting airfoil can be replaced by a point vortex placed at the quarter chord location.
The circulation r induced by a point vortex is cornputed using the chord length c, and
the lift coacient Cr according to
The liR coefficient is obtained through a closeci integration of the pressure p and surface
shear stress T., about the d a c e of the airfoil. Initidy, the axial and normal force
coefficients Ca ,C, are obtained,
2.5 Boundary Conditions 40 -
where nz and n, are unit outward normal vectors in the z and y cartesian directions
respectively. The lift and drag coefficients are then determined fkom
Cd = Cn sin + Ca COS a. (2.72)
Once the lift coefficient is obtained the circulation c m be used to compute the final
far-field correc ted velocities,
The location of the nodes that define the far-field boundary are provided by their radius r
and polar angle B relative to the quarter chord point. Enforcement of constant free stream
enthalpy provides a corrected far-field sound speed which is used in the non-reflective
boundary conditions,
The solution process generates disturbances that propagate throughout the corn-
putational domain. Simple imposition of the circulation corrected fiee Stream conditions
at the far-field boundary may cause outgoing disturbances to be reflected back into the
computational domain. Non-reflective boundary conditions can be applied by consider-
ing the flow through the fa-field boundary to be l o d y one-dimensional normal to the
boundary surface. The Riemann invariants of the one-dimensionai problem are given by,
where Un is the local velocity normal to the boundary. The associateci characteristic
velocities of the Riemann invariants Ri,R2 are respectively,
2.5 Boundary Conditions 41
The Riemann invariants are determineci through the corrected Mnables provided by equa
tions (2.73-2-75). Two additional quantities must also be specified in order to d e b e all
pertinent flow vaaiables at the boundary. These two quantities are the entropy and tan-
gential velocity Ut dehed as,
Both of these quantities are convected with the fluid flow and are therefore associated
with the normal velocity Un. The turbulence variable remains at zero on the boundary
since it is only associated with viscous effects near the airfoil surface.
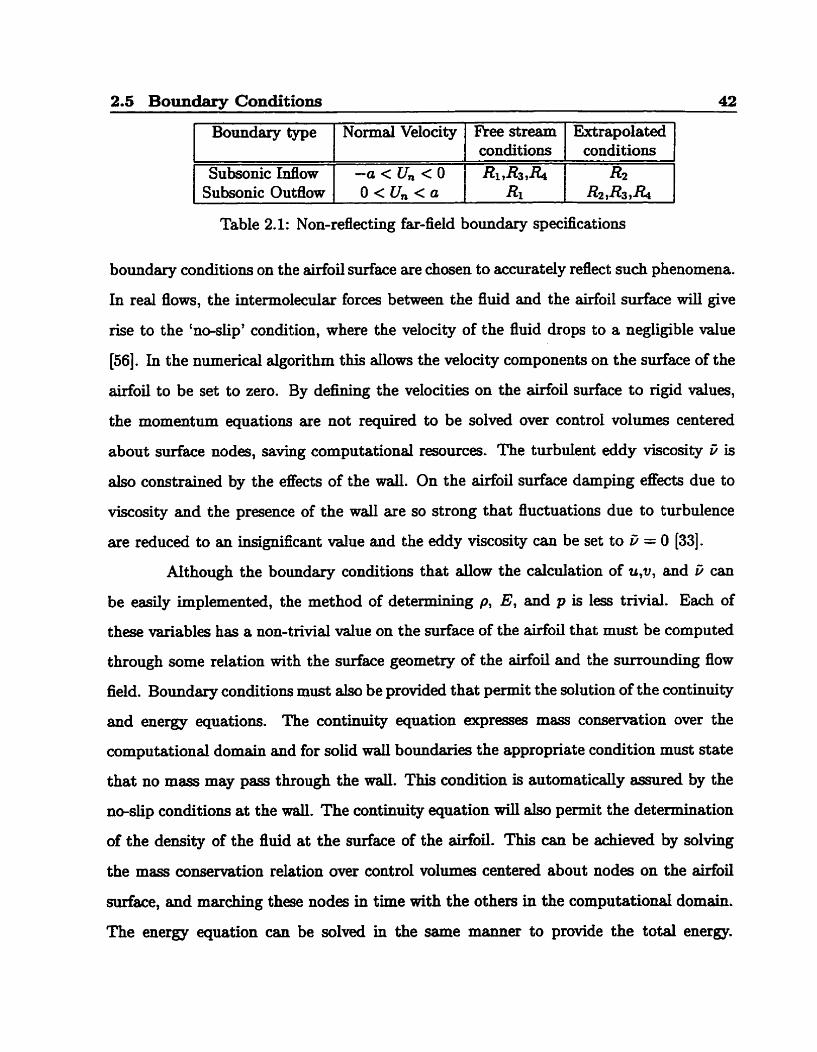
Thomas and Salas [66] impose a sign convention on the characteristic boundary
conditions that determines if kee stream conditions are to be used in the calcdation of
the invariant terms or if values extrapolateci fkom the interior computational domain are
to be used instead. Fluid and disturbances moving from the interior of the computational
domain out through the far-field boundary are ansignecl a positive convention. Therefore,
at a subsonic outflow boundary node O < Un < a and X2 > O while Xi < 0, imply-
ing that invariants associated with Un and Az are defined by information interior to the
boundary. Invariants R2,R3, and & can then by determuied by values obtained fkom the
nearest interior neighbour to the boundary node in what is commonly referred to as a
'zeroth order' extrapolation. The invariant associated wit h Al, RI, represents character-
istics moving into the computational domain and must be determined from free stream
information. For a subsonic idow boundary node, -a < Un < O and invariant R2 must
again be extmpolated, whüe &,Ra, and & must now be obtained fkom the free stream.
This information is summarîzed in the following table.
2.5.3 Airfoil Surface Conditions
In viscous flow problems, such as air moving over an aidoil surfixe, the region adjment
to the airfoil inside the boundary layer will be dominated by the dects of viscosi~. The
2.5 Boundary Conditions 42
1 Boundary type 1 Normal Velocity 1 F'ree stream 1 Extrapolated 1
Table 2.1: Non-reflecting far- field boundary speciûcations
Subsonic Inflow
boundary conditions on the airfoil surface are chosen to accurately reflect such phenornena.
In real flows, the intermolecular forces between the 0uid and the airfoil surface will give
rise to the 'no-slip' condition, where the velocity of the fluid drops to a negligible d u e
[56]. In the numericd algorithm this dows the velocity components on the surface of the
airfoil to be set to zero. By defining the velocities on the airfoil surface to rigid values,
the momentum equations are not required to be solved over control volumes centered
about surface nodes, saving computational resources. The turbulent eddy viscosity B is
also constrained by the efkcts of the d. On the airfoil s d a c e damping effects due to
viscosity and the presence of the wall are so strong that fluctuations due to turbulence
are reduced to an insignScant value and the eddy viscosity can be set to 6 = O [33].
Although the boundary conditions that allow the cdculation of u,v, and i can
be easily implemented, the method of detennining p, E, and p is less trivial. Each of
these variables has a non-trivial value on the surface of the airfoil that must be computed
through some relation with the surface geometry of the ahfoi1 and the surroundhg flow
field. Boundary conditions must a h be provided that permit the solution of the continuity
and energy equations. The continuity equation expresses mass conservation over the
computational domain and for solid wall boundaries the appropriate condition must state
that no m a s may pass through the d. This condition is automaticdy assurecl by the
no-slip conditions at the d. The continuiw equation will a h permit the determination
of the demi@ of the fluid at the surface of the airfoil. This can be achieved by solving
the m a s co~~~ervation relation over control volumes centered about nodes on the airfoil
surface, and rnaxching these nodes in time with the others in the computational domain.
The energy equation can be solved in the same manner to provide the total energy.
-a < Un < O conditions
&,R3 ,& conditions
R2
2.5 Boundary Conditions 43
However, two possibilities exist as to the themal state of the airf0i.i surface. The d a c e
termperature can be imposed by specifjhg a Dirichlet boundsry condition creating an
isothemd condition at each boundary point. The alternative is to specify the rate of
heat flux through the w d in a Neumann condition. Since the objective of this numerical
algorithm is to determine steady state solutions, the condition most consistent with the
objective is to impose an adiabatic thermal boundary condition. This condition specifies
that no thermal energy passes through the wd. It is imposed by defining the temperature
gradient normal to the d as being zero. In using the no-slip conditions, the only energy
flux that c m pass through the wall is thermal. Therefore, to impose the adiabatic wall
condition in the h i t e volume context, the heat flux terms in the energy equation along
the walls are neglected. Along waM boundaries this states
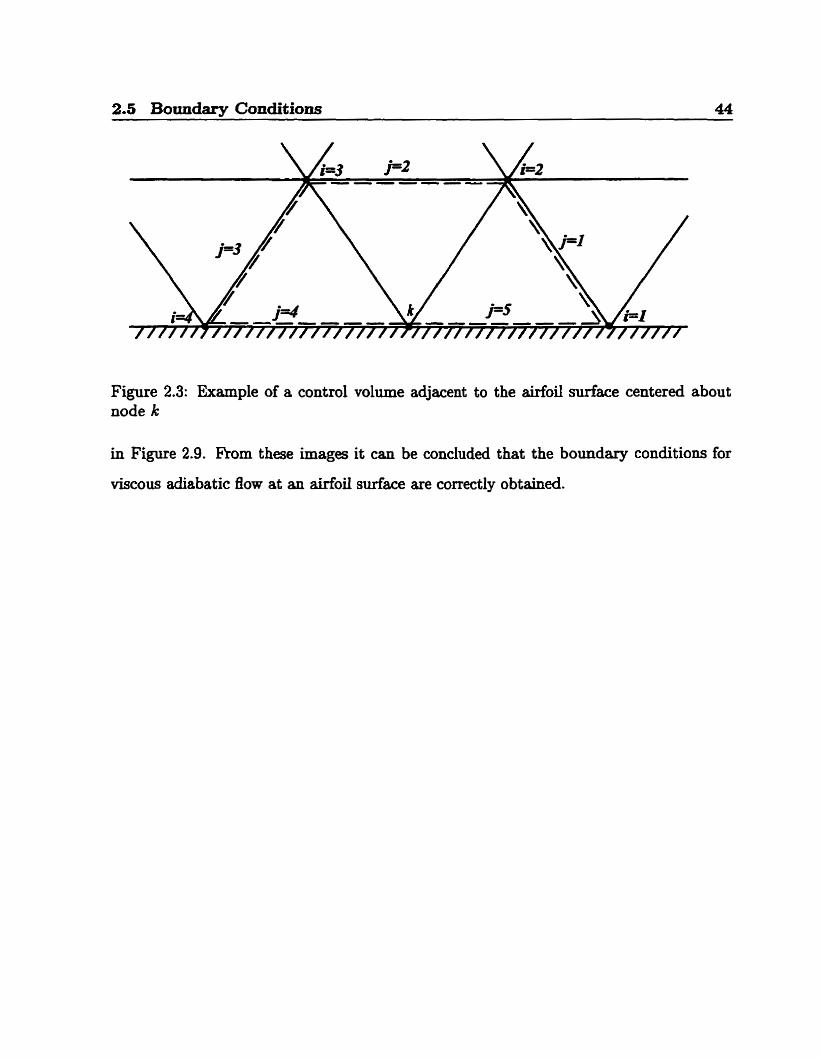
where n is the direction normal to the w d and ds is the waU edge length. Figure 2.3 shows
an example of a control volume adjacent to the airfoi1 surface. The adiabatic conditions
according to equation (2.79) will be imposed by neglecting the heat flux components
through eàges j = 4 and j = 5. Once p and E are obtained on the wd, the equation of
state (2.12) can be used to find p.
An example of the flow field near an airfoil d a c e provided by the no-slip adia-
batic boundary conditions is shown in Figures 2.4 to 2.9. The flow is about a NACA 0012
airfoil at a free stream Mach number of 0.5 et 0.0 degrees angle of attack with a Reynolds
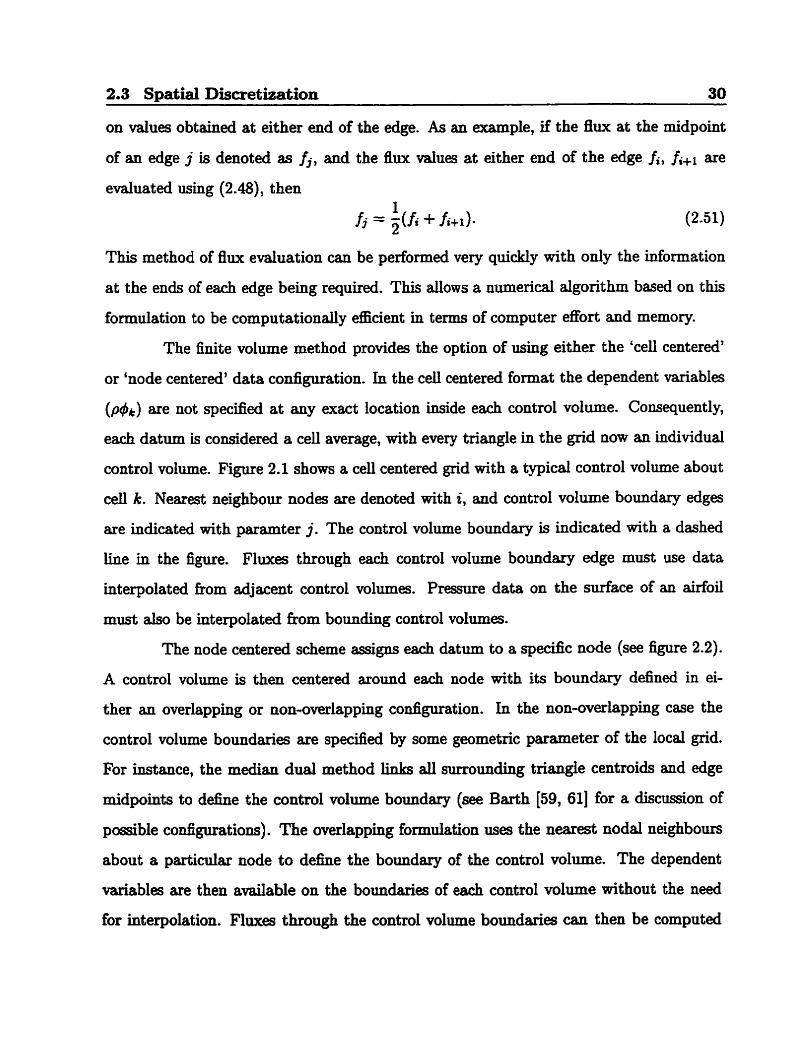
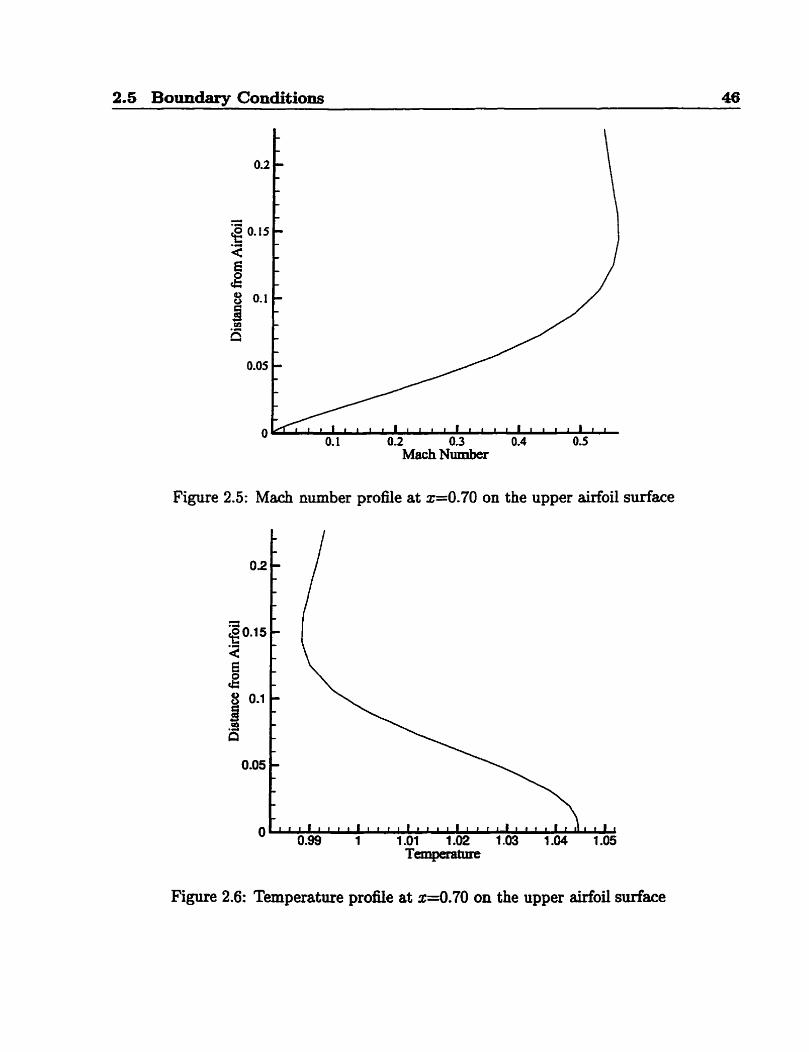
number of 5000. Figure 2.4 shows the Mach number field about the airfoil surface. A plot
of the Mach number profde with distance from the airfoil &&ce taken at x=0.70 along
the upper surf' is given in Figure 2.5. Figures 2.6 provides the temperature profile
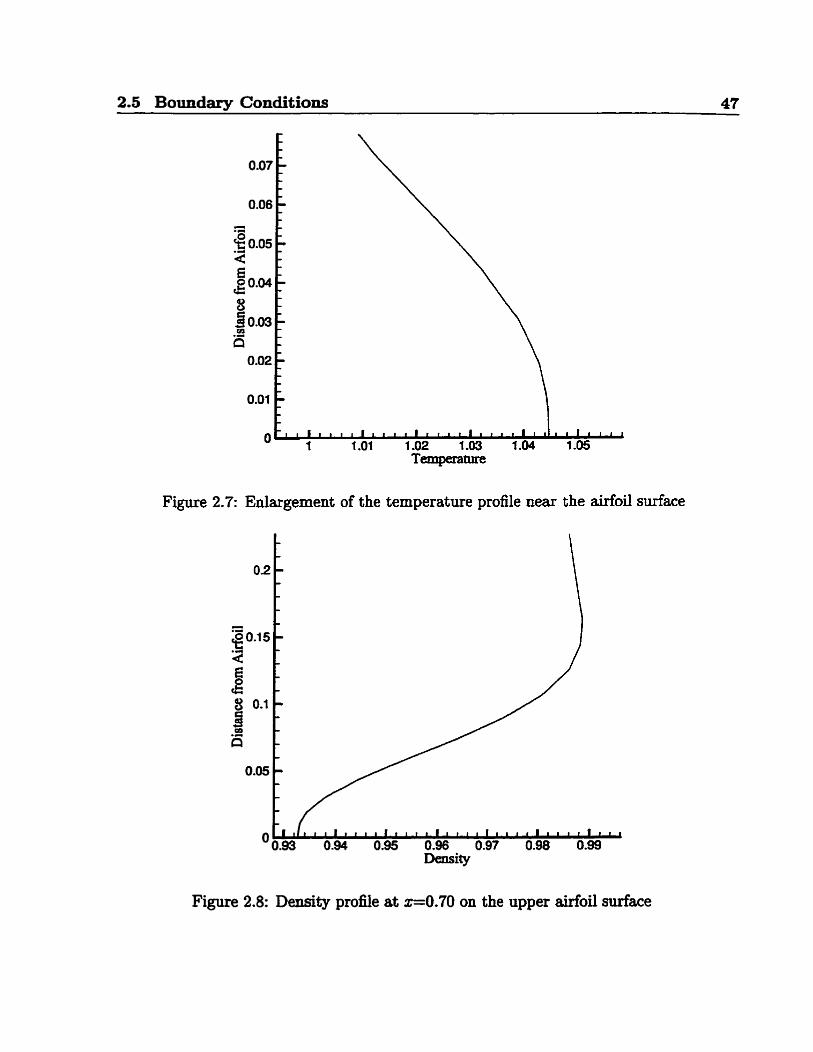
at the same point, while 2.7 gives an enlargement of this profile near the airfoil surface.
The profile dearly shows that implementation of the adiabatic boundary conditions as
describeci produces the desired zero n o d gradient at the airfoil surface. The zero nor-
mal gradient also appears in the densi@ profile in Figure 2.8 and the pressure profile
2.5 Boundary Conditions 44
Figure 2.3: Example of a control volume adjacent to the airfoil surface centered about node k
in Figure 2.9. Rom these images it can be concluded that the boundary conditions for
viscous adiabatic flow at an aufoil surface are correctly obtained.
2.5 Boundary Conditions 45
Figure 2.4: Mach number contours about a NACA 0012 at M,=0.5, a=O.O, R%, = 5000
2.5 Boundariv Conditions 46
Mach Number
Figure 2.5: Mach number profile at z=0.70 on the upper airfoil surface
Figure 2.6: Temperature profile at x=0.70 on the upper airfoil sudace
2.5 Boundary Conditions 47
Figure 2.7: Enlargement of the temperature profile near the airfoil surface
Figure 2.8: Density profile at ~ 0 . 7 0 on the upper airfoil surface
2.6 Convergence Enhancement 48
9 .C
0.1 5 .d
4
B Ck
Figure 2.9: Pressure profile at z=0.70 on the upper airfoil surface
2.6 Convergence Enhancement
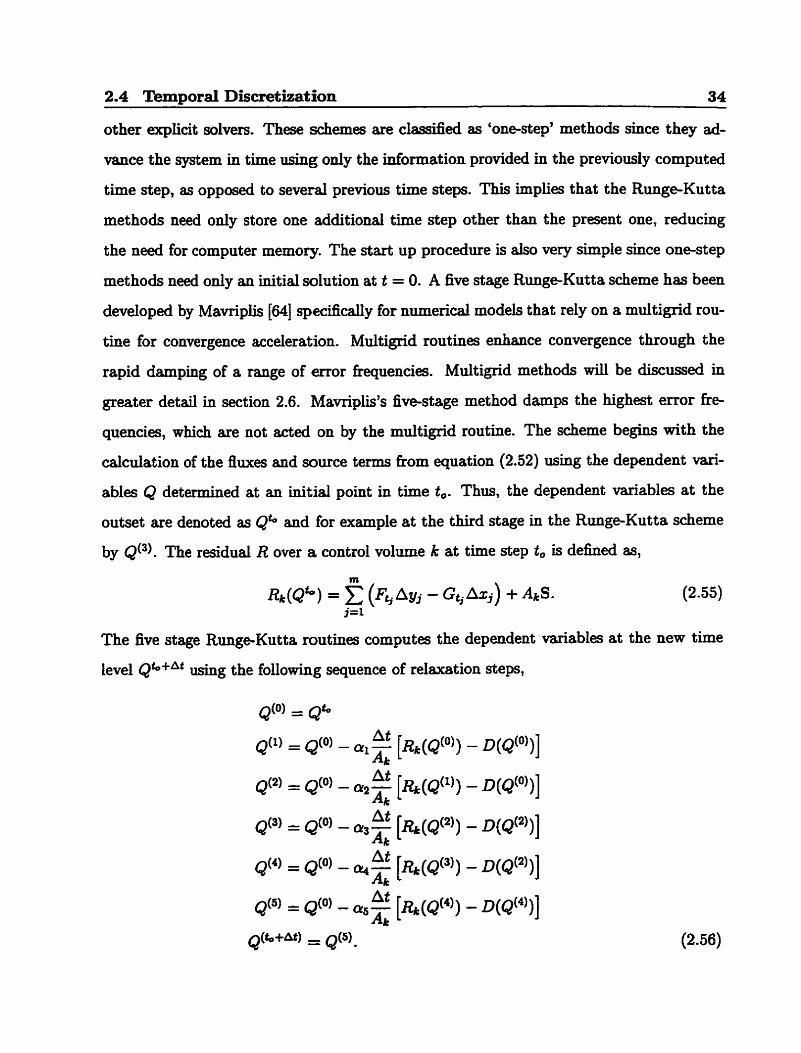
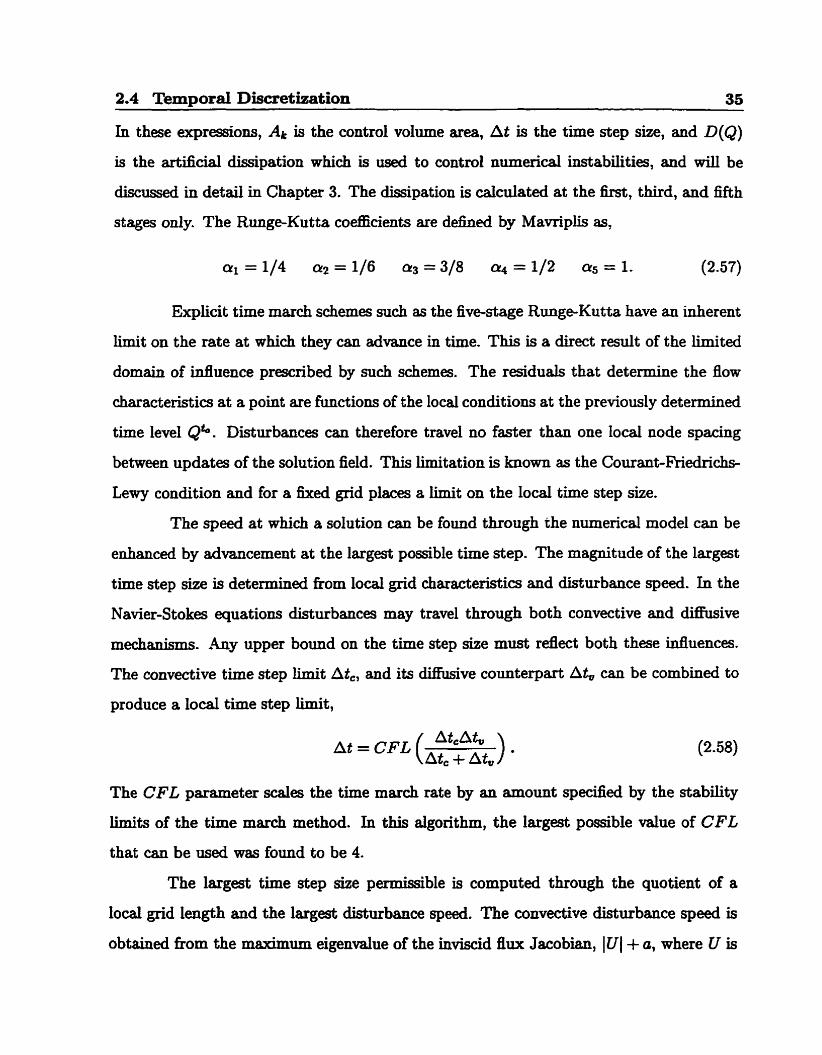
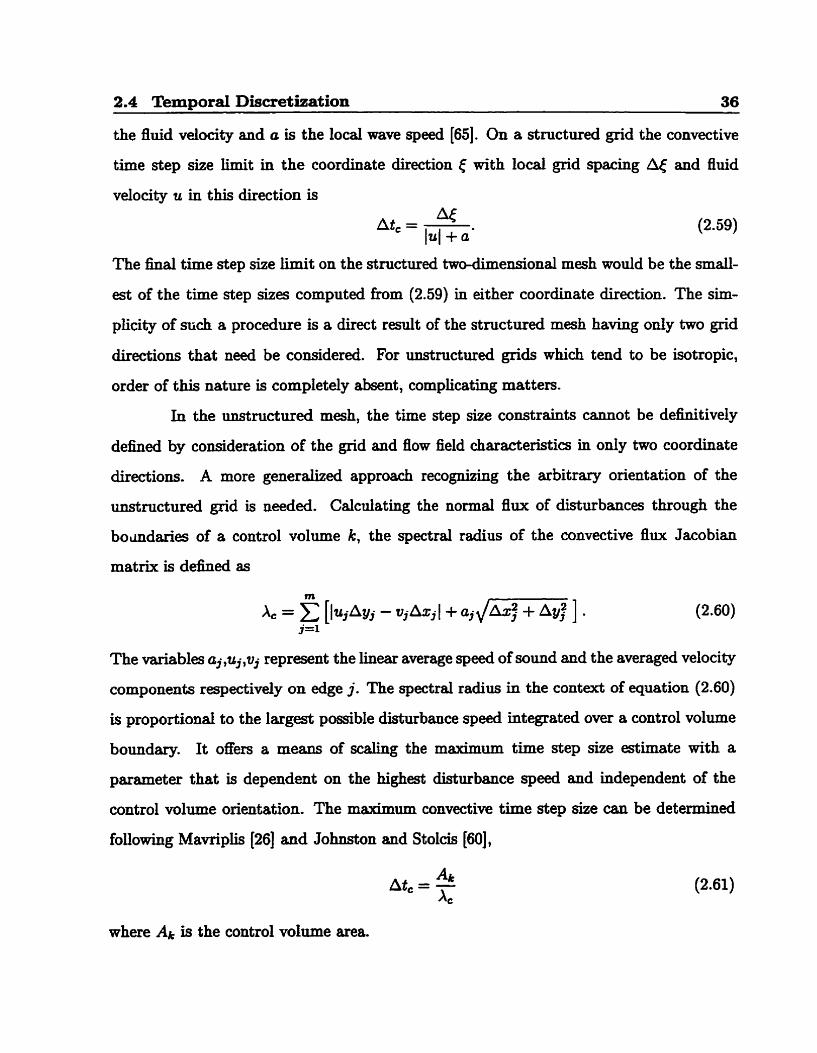
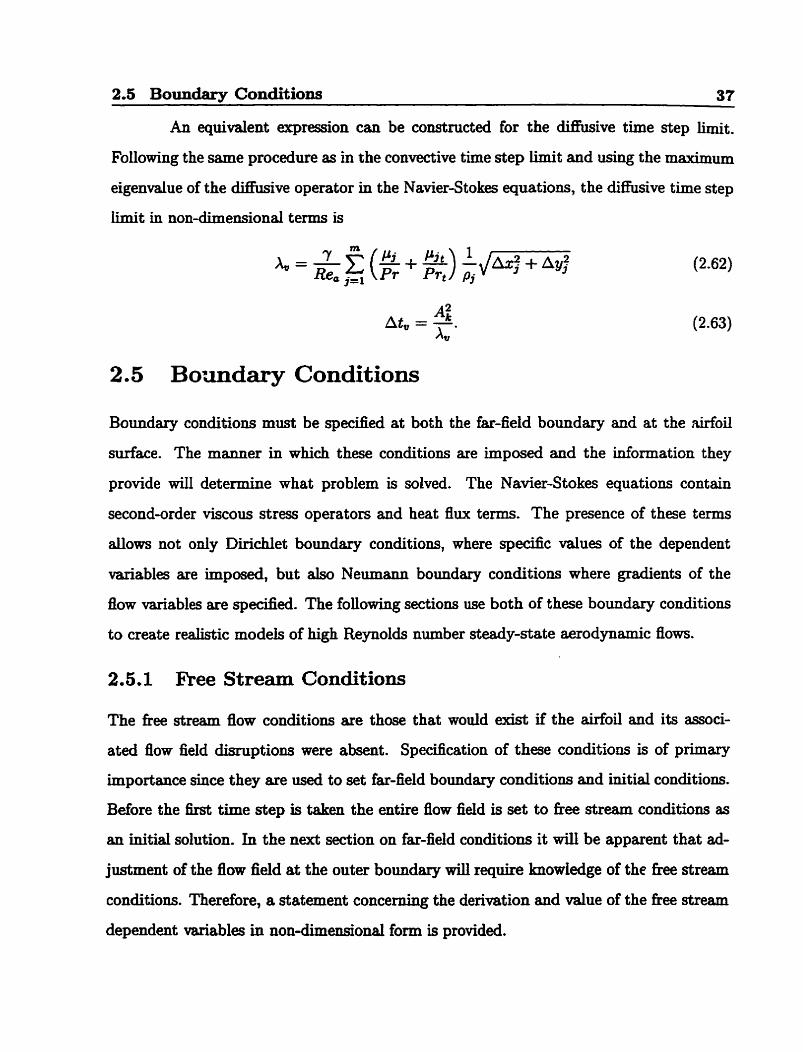
In section 2.4 it was seen that the explicit Runge-Kutta time m a c h method was con-
strained in the size of the largest allowable t h e step. In practical terms, information
propagating across a computational domain must do so over numerous thne steps in
order to maintain stability. For large grids with a high nodal density the amount of corn-
putation t h e to obtain a convergecl solution will be great. In cases such as high Reynolds
number flows where the off wall spacing near an airfoil body will be extremely s m d this
problem will be particularly acute. To address this diflicdm a nwnber of convergence
acceleration methods have been implemented.
2.6.1 Local Time Stepping
The maximum dowable t h e step size over an arbitrary control volume is speciiied in
equation (2.58). Each control volume will have a unique time step size limit based on the
2.6 Convergence Enhancement 49
control volume geometry and local 00w conditions. If the desireci outcome of the algorithm
was a t h e accurate evolution of a flow field, the entire computational domain must then
be advanceci at the smaüest time step found within its bounds in order to maintain a
d o m time development at each node. Since the objective of this algorithm is the
steady state solution, a uniform tirne development at each node is not required. Every
control volume is marched in time at the rate specified by its own t h e step b i t . This
permits every region of the domain to approach convergence at the maximum possible
rate based on the local grid and flow field constraints.
2.6.2 Residual Smoothing
The convergence rates of explicit tirne march schemes are restricted by the limiteci range
that disturbances may travel within a given tirne step. Increasing the distance over which
information is provided prior to any time march will permit a larger maximum time step
size. The residual smoothing method enhances the support of the algorithm by providing
each node with a residual correction based on an averaging procedure of the surroundhg
residuals [IO]. The residual used in the convergence enhancement methods is defined in
equation (2.55) with the artificial dissipation term included,
The total residual at node k is corrected based on the following implicit equation,
The total residuals designated as 'old' are the uncorrectecl values and those with 'new' are
the co~esponding corrected ones. The equation can be written in the following format,
This system of equations produces a sparse coefficient matrix which must be inverted to
cdculate &-). However, an algorithm to exactly invert this rnatrix wi l l signincantly
2.6 Convergence Enhancement 50
increase the cornputationd d o r t required for each time step. As an aitemative, restricting
the constant c to the range O < c < 1, will assure that the matrix is diagondy dominant
and the inexpensive approximate Point-Jacobi method can be used,
The residual smoothing method is applied to the newly calculated total rmidual term be-
fore t h e marchhg is conducted. The most effective configuration of the residual smooth-
h g occurs when two Point-Jacobi iterations are done, and the constant a is set to 0.175,
as determineci by Jarneson et al. [IO] and Predovic [68]. Residual smoothing was found
to approximately double the maximum time step size Limit with approxixnately a 25%
increase in computational expense.
2.6.3 The Multigrid Method
Both local time stepping and residual smoothing are effective means of enhancing conver-
gence. However, their success is limitecl by the local nature of their domain of auence .
Local time stepping influences the convergence rate of the control volume over which it
is applied. Residud smoothing uses information provided by the nearest neighbours of
a given node. Any disturbance extending over an area with a large population of nodes
will not be detected, and under such circitmstrnces the local methods will be completely
ineffective at enhmcing convergence. In this instance, only a convergence acceleration
method whose influence extends well beyond the nearest neighbours of a given node will
be effective.
The multigrid method was constructed to extend its domain of Muence to cover
the enth grid. This pefmits disturbances that extend over a large number of nodes,
oRen calied low frequency mors, to be resolved in a small number of time steps. While
this leaves the disturbances that cover only a small number of nodes, usually identifid
as high frequency error, to be reduced by the local convergence enhancement techniques.
The multigrid method recognizes the faet that mors which cover a large part of the
2.6 Convergence Enhancement 51
computational domain can best be reduced by coarse grids. The s m d nurnber of nodes
and the large tirne step sizes due to the greater node spacing allows the corne grid to
rapidly resdve such errors. Residuals and flow field information including the errors are
initidy tranderred fiom a fine mesh to a coarser one. A time step is taken on the coarse
mesh and a correction is created that is tranderred back and appüed to the fine grid.
With a series of grïds of increasing coarseness, various error fkequencies present on the
finest grid can be reduced rapidly. This is the essence of the multigrid method. On the
finest grid, high frequency errors are reduced quickly by the local convergence methods,
while the lower fiequency errors are reduced by the coarse meshes of the multigxid routine.
On a series of grids with a four-fold decrease in the number of nodes between successively
coarser meshes, the increase in cornputational efFort in multigridding is approximately
50% over the single grid solver on the hest grid per time step. However, the benefit of
this additional computational effort is an order of magnitude increase in the convergence
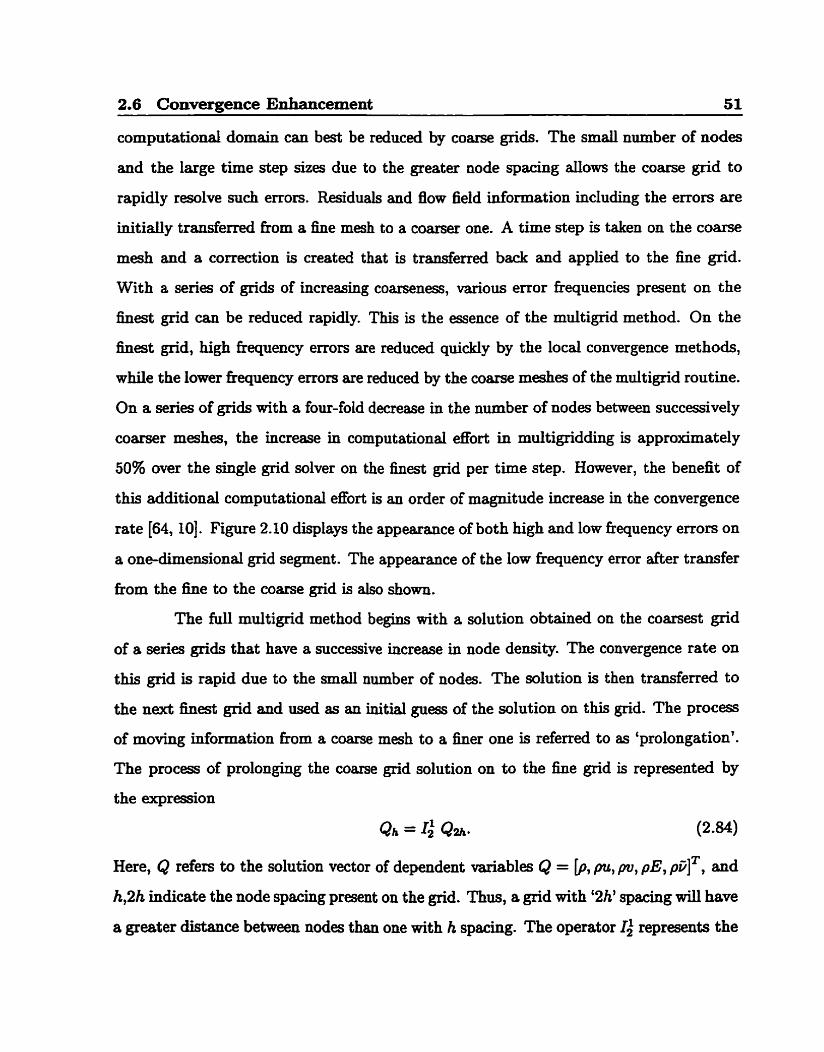
rate [64,10]. Figure 2.10 displays the appearsnce of both high and low frequency errors on
a one-dimensional grid segment. The appearance of the low frequency error after transfer
fiom the fine to the corne grid is also shown.
The full multigrid method begins with a solution obtained on the coarsest grid
of a series @ds that have a successive increase in node density. The convergence rate on
this grid is rapid due to the small number of nodes. The solution is then transferred to
the next hest grid and used as an initiai guess of the solution on this grid. The proces
of moving information fkom a coarse mesh to a finer one is referred to as 'prolongation'.
The process of prolonghg the coarse grid solution on to the fine grid is represented by
the expression
Qh = 1: Qu&* ( 2 - w
Here, Q refers to the solution vector of dependent variables Q = [p, pu, pu, pE, and
h,2h indicate the node spacing present on the grid. Thus, a grid with '2h' spacing will have
a greater distance between nodes than one with h spacing. The operator I i represents the
2.6 Convergence Enhancement 52
High frequency error, 1-D fhe grid
Low fkequency error, 1-D 5 e grid
Low fiequency error restricted to coarse grid fkom fine grid
Figure 2.10: Example of a high and low frequency error on a 1-D grid showing the appearance of the low frequency error after trader to the coarse grid
2.6 Convergence Enhancement 53
linear interpolation of information fiom the coarse grid to the finer. Once the prolongation
hom 2h to h is complete, a time step is taken on h to reduce high fiequency error. Any low
frequency error that persists is transferred back to the coarse grid dong with the solution
vector and the residuals in a process referred to as 'restriction', which is represented by
Qui = r: ~h
It should be observed that the restriction operator on the solution vector is not the
same as the operator on the residuals c. The low fiequency error is reduced quickly by
a time step on the coarser mesh.
However, since the objective of the multigrid routine is to reduce low frequency
errors on the finest grid only, the tirne step on the coarser grids should be driven by the
residuals of the finest grid. This is achieved by adding a forcing function P to the residual
on the coarse grid based on the finest grid residud,
The residual Ryi of the forcing function is computed on the coarse grid based on the
restricted fine grid solution. The forcing function is determined before any Runge-Kutta
stages are made and held fixed for the entire coarse grid time step. The Runge-Kutta
relaxation routines for stage b on the coarse grid are now,
Changes to the coarse grid solution field are a function of the fine grid residual only due to
residual cancellation of Ra in the i h t Runge-Kutta stage. In the event that the restricted
residual nom the fine grid vanishes, no changes will be made on the coarse grid solution.
If some adjustment of the coarse grid solution has been made, a correction (AQ), csn be
prolongated to the fine grid solution by
2.6 Convergence Enhancement 54
Fine Grid
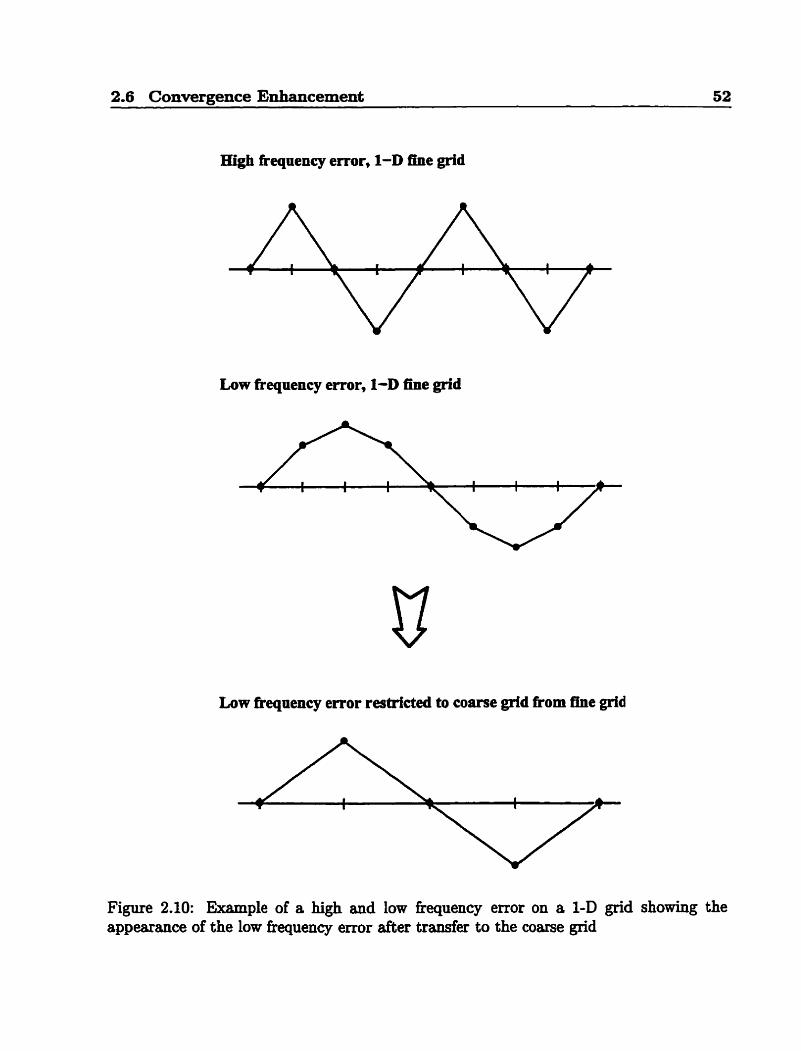
Figure 2.11: The saw-tooth mdtigrid cycle development on a series of three @ds.
Qh = ~ f ) + Ii(AQ). (2.90)
The solution vector on the fine grid at stage five of the Runge-Kutta routine Q(5) W ~ S the
one origindy restricted to the corne grids for correction. Once a solution is found on
the finest grid a new fmer grid can be added to the process.
Following the procedure just outlined, a series of grids can be used in the multi-
grid process to rapidly correct disturbances over a range of frequencies. The system of
restricting the fine grid residual and solution vector through a series of corne meshes and
prolonghg a correction back to the fine grid is referred to as a 'saw-tooth' multigrid cycle,
which is illustratecl in figure 2.11. At each coarse grid a RungeKutta t h e step is taken
using residual and flow field information provided fkom the previous ber grid. Once the
coar~est grid is complete a correction is prolonged back to the h e s t grid without any
furt her tirne steps taken.
Before the multigrid scheme can be implemented the prolongation and restriction
trander operators must be determinecl. On a structureci grid a coarse mesh can be easily
created by removing every second node in each coordinate direction on a fine grid. In
2.6 Convergence Enhancement 55
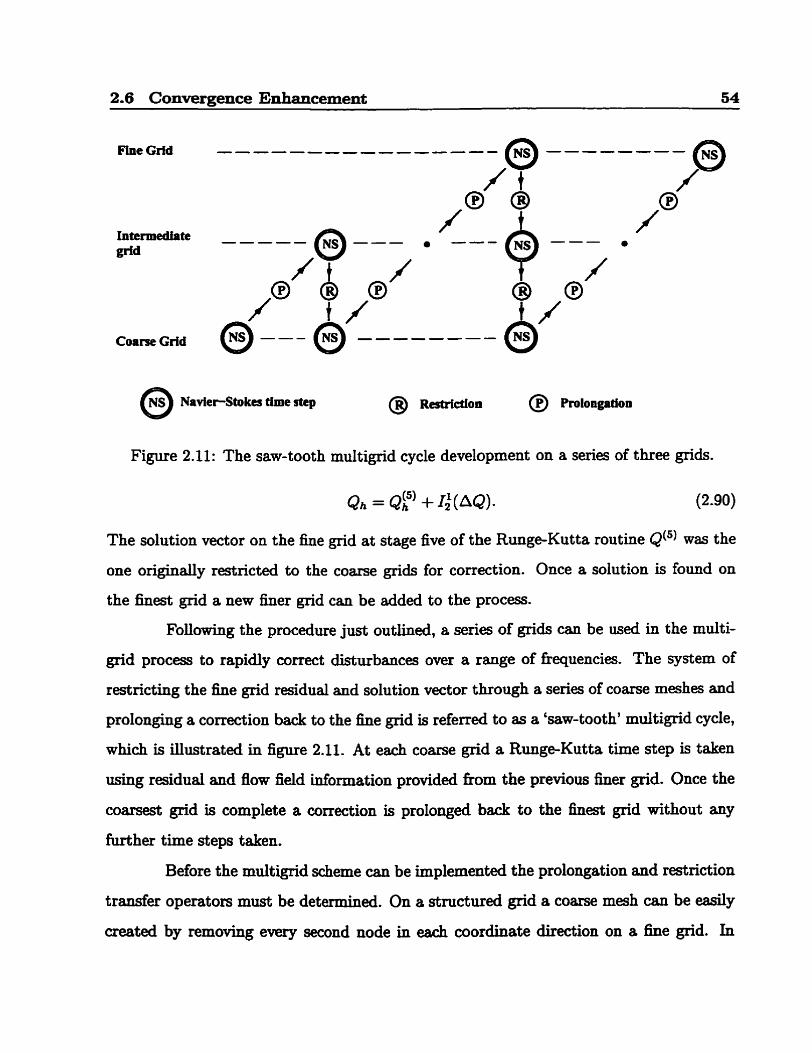
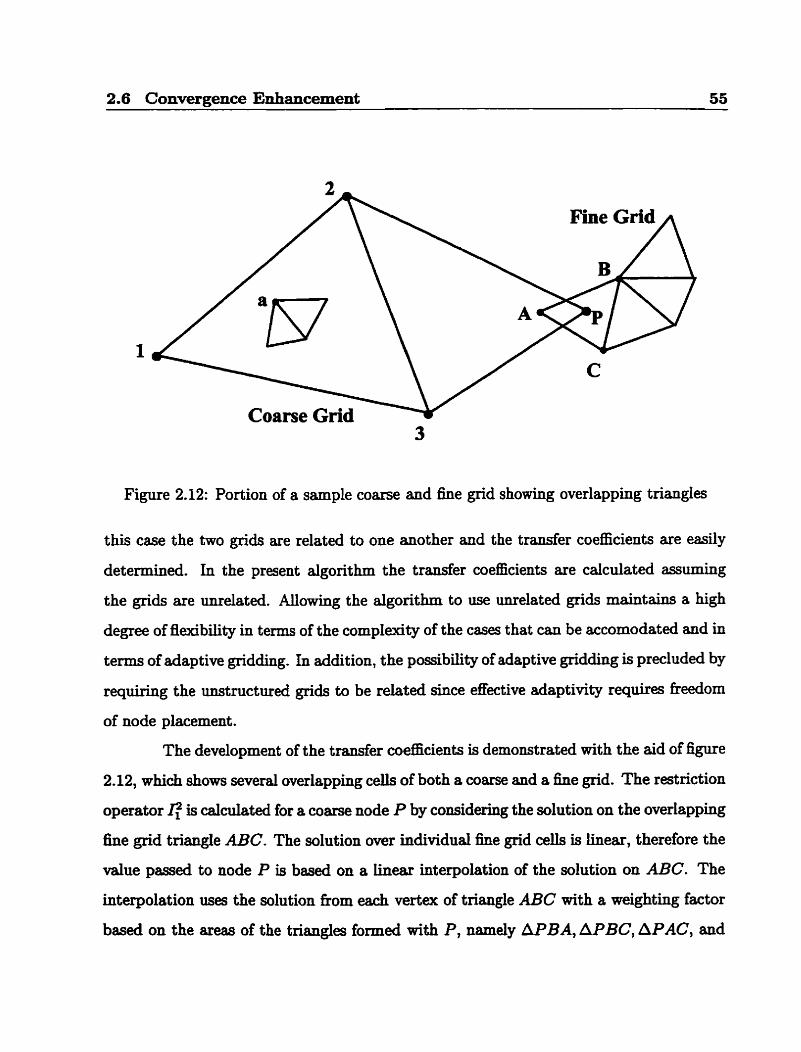
Figure 2.12: Portion of a sample coarse and fine grid showing overlapping triangles
this case the two grids are related to one another and the transfer coefficients are easily
determined. In the present algorithm the transfer coefficients are calculateci assuming
the grids are unrelatecl. Allowing the algorithm to use unrelated grids maintains a high
degree of flexibility in t e m of the complexity of the cases that can be accomodated and in
terms of adaptive gridding. In addition, the possibility of adaptive gridding is precluded by
requiring the unstructured grids to be related since effective adaptivity requires fkeedom
of node placement.
The development of the t r a d e r coefficients is demonstrated with the aid of figure
2.12, which shows several overlapping cells of both a coarse and a fme grid. The restriction
operator is calculated for a coame node P by considering the solution on the overlapping
fine grid triangle ABC. The solution over individual fine grid celle is linear, therefore the
value passecl to node P is based on a hear interpolation of the solution on ABC. The
interpolation uses the solution fiom each vertex of triangle ABC with a weighting factor
based on the areas of the triangles formed with P, namely APBA, APBC, M A C , and
2.7 Grid Generation 56
normalized with the area of ABC, M C . The value at node P is then a function of the
values at each vertex of ABC with its respective weighting factor,
APBC APAC QP = Q A - ~ +QB
APBA AABC + QcMC. (2.91)
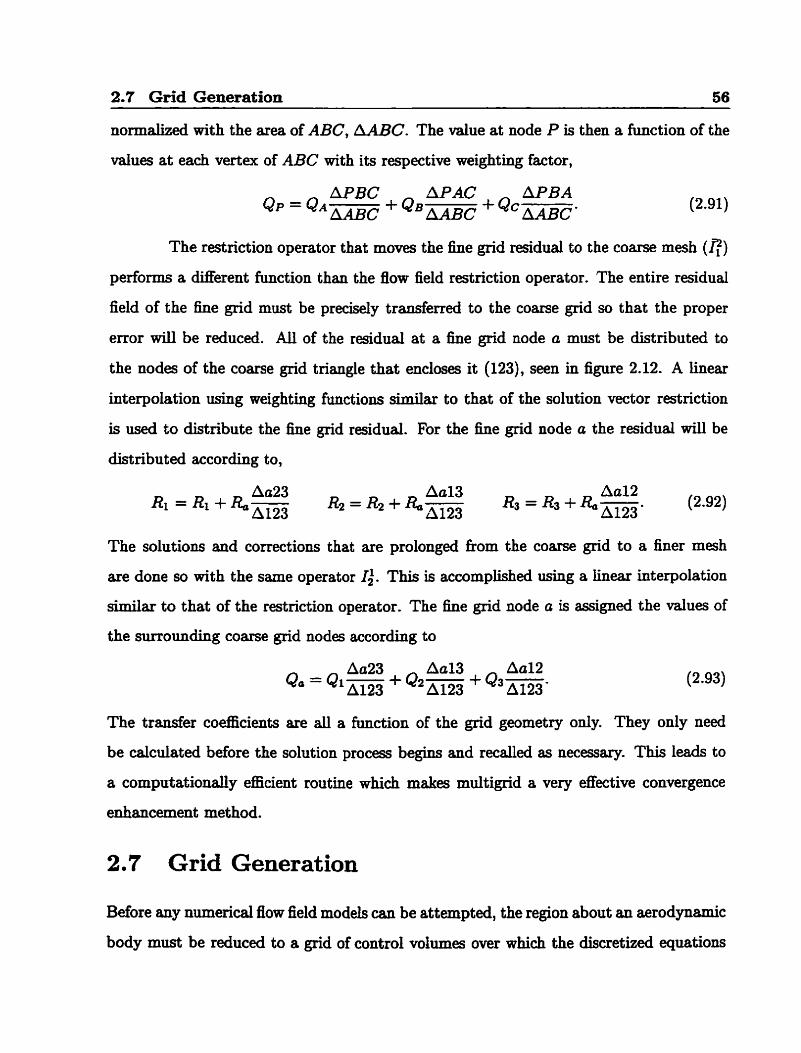
The restriction operator that movg the fine grid residual to the coarse mesh (c) performs a dinerent function than the flow field restriction operator. The entire residual
field of the fine grid must be precisely t r d e r r e d to the came grid so that the proper
error will be reduced. AU of the residual at a fine grid node a must be distributed to
the nodes of the coarse grid triangle that encloses it (123), seen in figure 2.12. A hear
interpolation using weighting functions similar to that of the solution vector restriction
is used to distribute the fine grid residud. For the fine grid node a the residual will be
distributed according to,
The solutions and corrections that are prolonged fiom the coarse grid to a finer me&
are done so with the same operator 1'. This is accomplished using a linear interpolation
similm to that of the restriction operator. The fine grid node a is assigned the values of
the surrounding coarse grid nodes according to
The transfer coefncients are all a function of the grid geometry only. They only need
be calculateci before the solution process begins and recalled as necessary. This leads to
a computationdy efficient routine which makes multigrid a very effective convergence
enhancement method.
2.7 Grid Generation
Before any numerical flow field models can be attempted, the region about an aerodynamic
body must be reduced to a grid of control volumes over which the discretized equations
2.7 Grid Generation 57
can be solved. The grid generation process is independent of, and precedes the solution
algorithm. It begins with a representation of the airfoil cross-section profile as a set of
discrete points. Profles are obtained from continuous representations of airfoil shape
through a series of spline funetions between a fked set of points [69]. The outer boundary
of the computational dornain is also represented by a series of points, which are added to
the airfoi1 data set. With both inner and outer boundaries specified the dornain can be
Wed 6 t h non-overlapping elements fiom which the control volumes can be constnicted.
The most commonly used elements to W two-dimensional cornputational domains
are triangles and quadrilatersls. The triangle is selected as the basic grid element based on
its Qmplicity and the large number of algorithms available which use it for grid generation
and postprocessing. A detailed description of a number of these methods is given by
Barth (591. Invariably these methods generate grids by trianpuiating a predetennined
set of interior points or by an advancing front method. In a given set of mesh points
a triangulation routine creates a field of non-overlapping triangles within a prescribed
geometric constraint. A triangulation that maximizes the smaLlest interior angle of a pair
of adjacent triangles that share a cornmon edge is known as a Delaunay or equilangular
triangulation. If the geometric constraint is to minimire the largest angle of the triangle
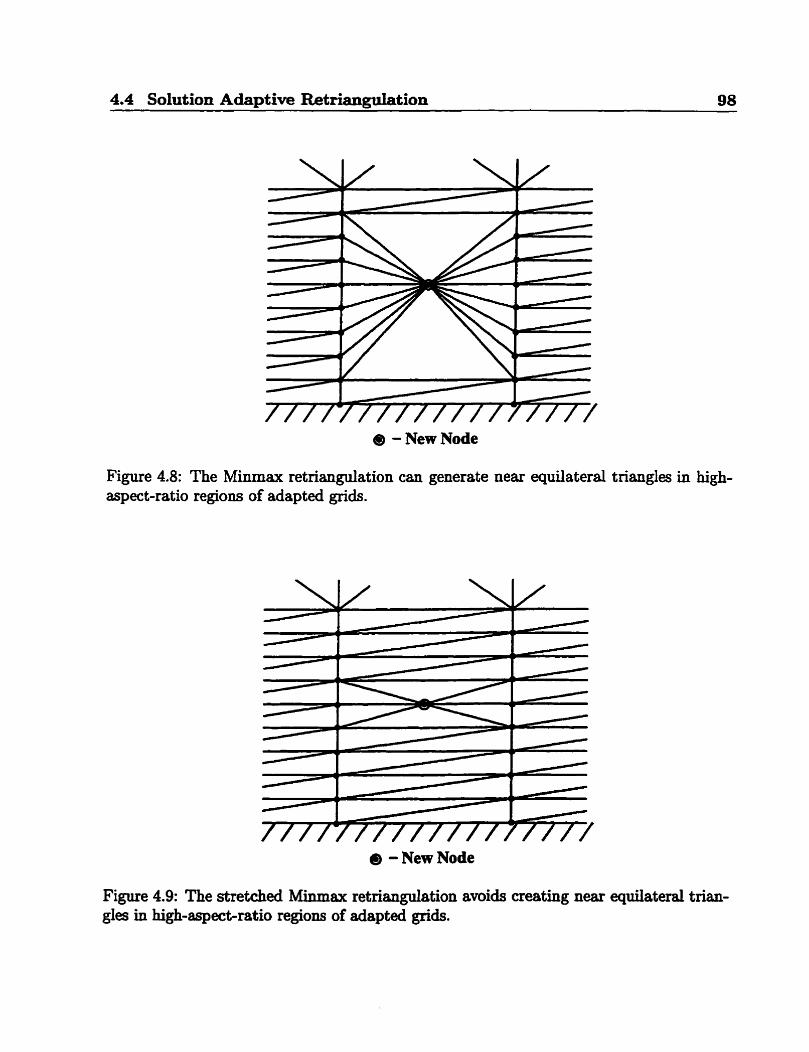
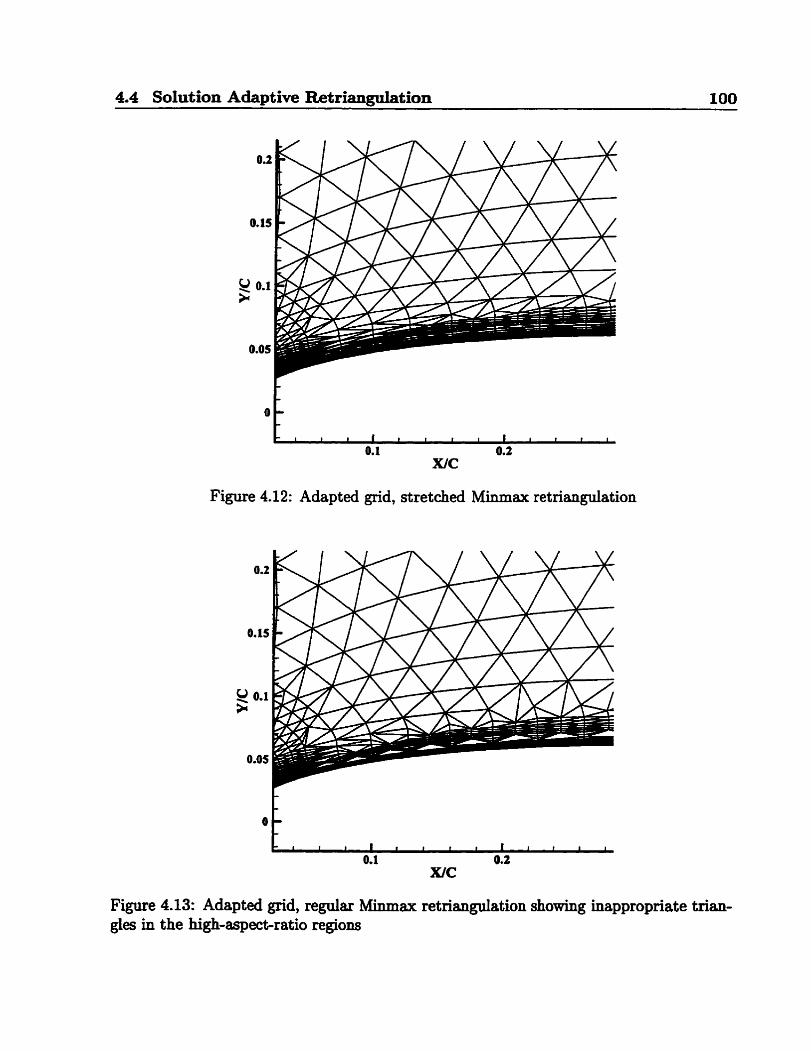
pair, the triangulation is d e d a Minmax routine. Numencal models of viscous flows
comrnonly use the Minmax routine in grid generation to avoid the possibility of creating
near quilaterd triangles in boundary layer regions that might otherwise be created with
the Delaunay method. The advancing &ont method assumes that a set of intenor points
is not a d a b l e and creates the interior grid in a series of steps. An active set of edges
forming a closed loop is definecl as the 'front'. The &ont is advancd by introducing a
new layer of points adjacent to the fiont which will serve as the new active front. With
the airfoil body and the outer boundary as the initial fronts, the entire domain is fillecl
as the imo fronts advance and ultimately rnerge.
The grid genemtion algorithm used in this numerid mode1 is a combined admc-
2.7 Grid Generation 58
ing front method and Minmax triangulation. The advancing nont is used to progressively
fill the interior portions of the grid, with the Minmax triangulation used to specify the
comectivity. One of the advantages of the advancing fiont method is the ability to
specify the location of the next level of nodes according to any desired criterion. The
option is available to generate triangles that are nearly equilateral in shape or ones that
are stretched. This abiliw is critical if fi& are to be generated for use in modelling
viscous flows. The boundary layers adjacent to airfoil sUTfaces in viscous flows will con-
tain gradients in the cross-Stream direction several orders of magnitude larger than the
strearnwise direction. Efficient modelling of such flows requires high nodal density in the
cross-stream direction with sparse nodal spacing in the streamwise direction, leading to
highly stretched, high aspect ratio triangles adjacent to the airfoil surface. The advanc-
ing nont method anticipates the presence of the boundary layers by starting the node
addition process with nodes placed very near the airfoil surface. As the front moves away
fiom the airfoil, the node spacing gradually increases to the point where the triangles are
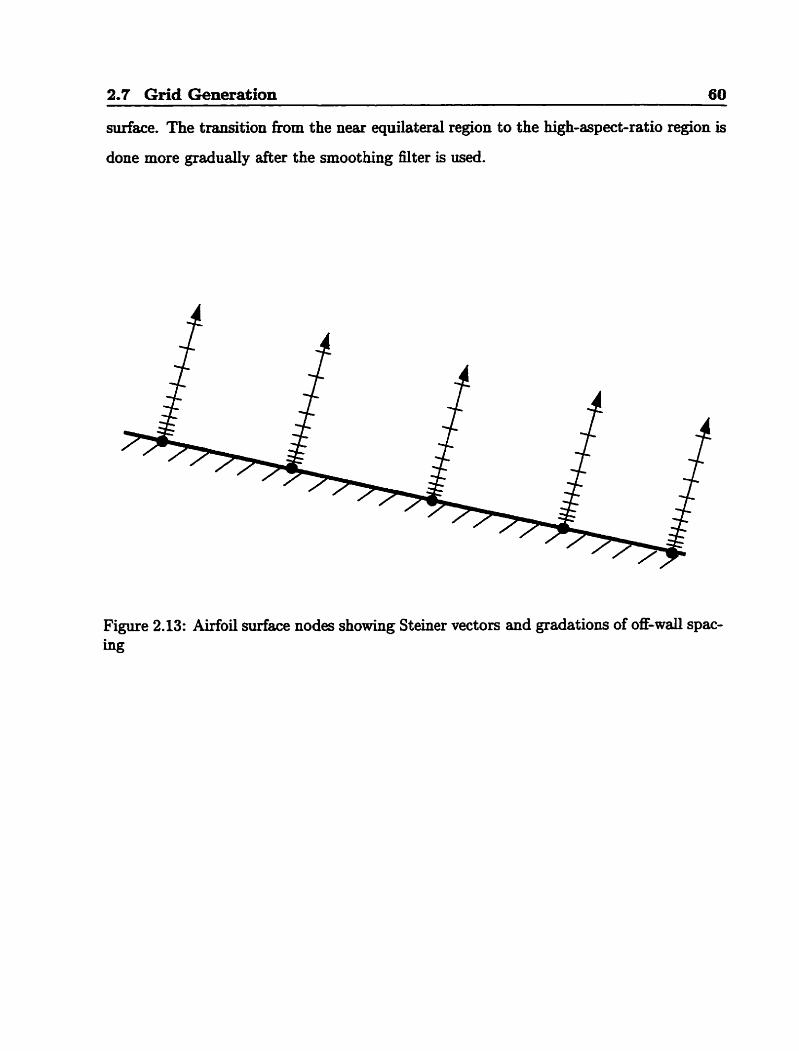
nearly equilaterd. Node placement is directed by a vector that emanates fiom the airfoil
surfsce in what is known as a stretched Steiner methodology [59]. A portion of an airfoil
surface is shown in Figure 2.13 with the direction vectors and the specified node spacing
indicated. The initial node spacing normal to the airfoil d a c e and the expansion raze
of the node spacing is set by the user prior to grid generation. Once the triangles become
nearly equilateral, the Steiner methodology is tenninated, and the advancing fkont con-
tinues with the creation of generally equilateral triangles based on the average local node
spacing dong the fiont [70].
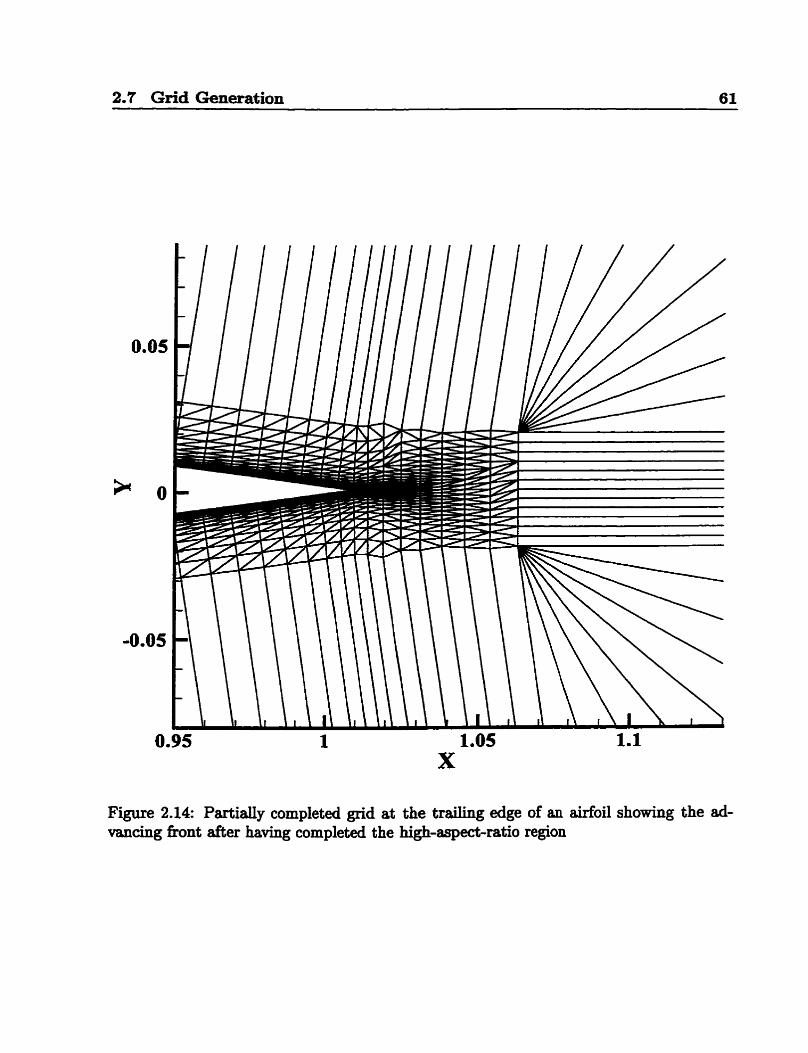
The boundary layers on the sUTf8ce of the airfoil extend into the interior of the
computationd domain to form the wake at the traüing edge. For this reason the high-
aspect-ratio region extends downstream into the domain at the trailing edge of each airfoil
element. Figure 2.14 shows the trailing edge region of a partially completed grid. The
advancing fkont has progressed to the point where the rernaining domain is to be filled with
2.7 Grid Generation --
near equilateral triangles. Edges rdiating fiom the grid surface connect the advancing
front at the airfoil surface to the front approaching £rom the outer boundary. This is done
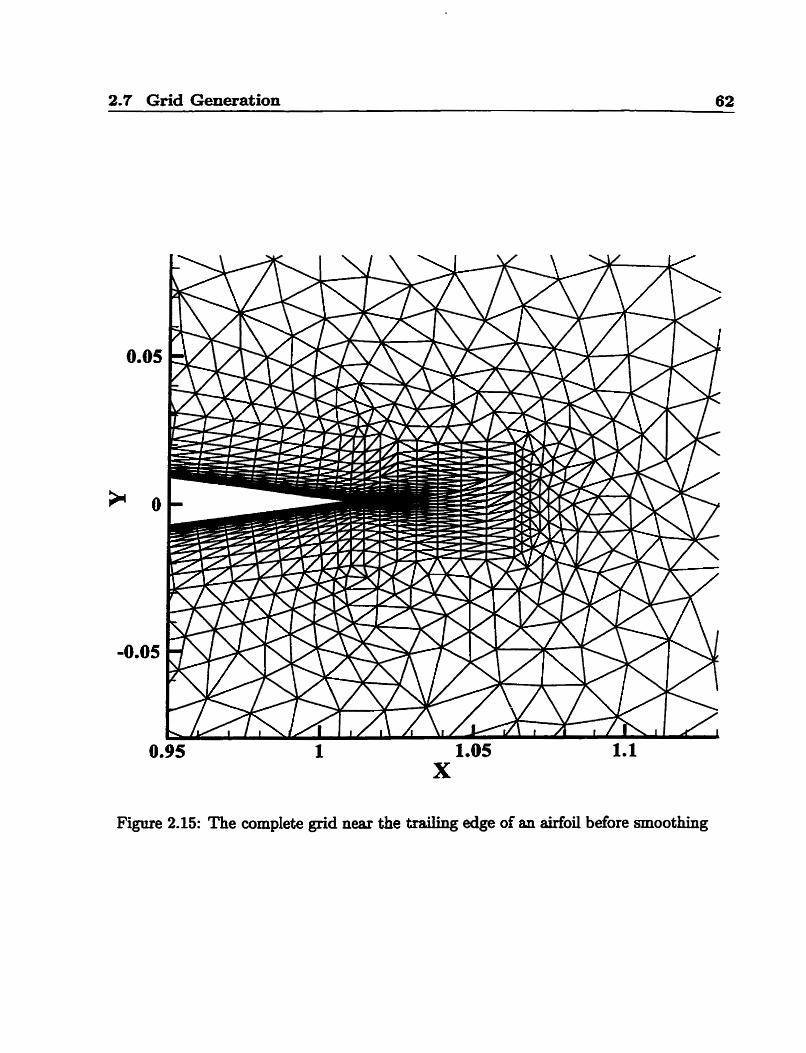
to ensure a smooth transition at the confluence of the two fronts. As the wake region of
the grid extends into the coniputational domain, the normal node spacing imposed at the
airfoil sudace is gradually equalized. At the end of the wake region the node spacing is
uniform, permitting a smooth transition between the hi&-aspect-ratio wake region and
the equilateral interior domain. Figure 2.15 shows the completed grid at the trailing edge.
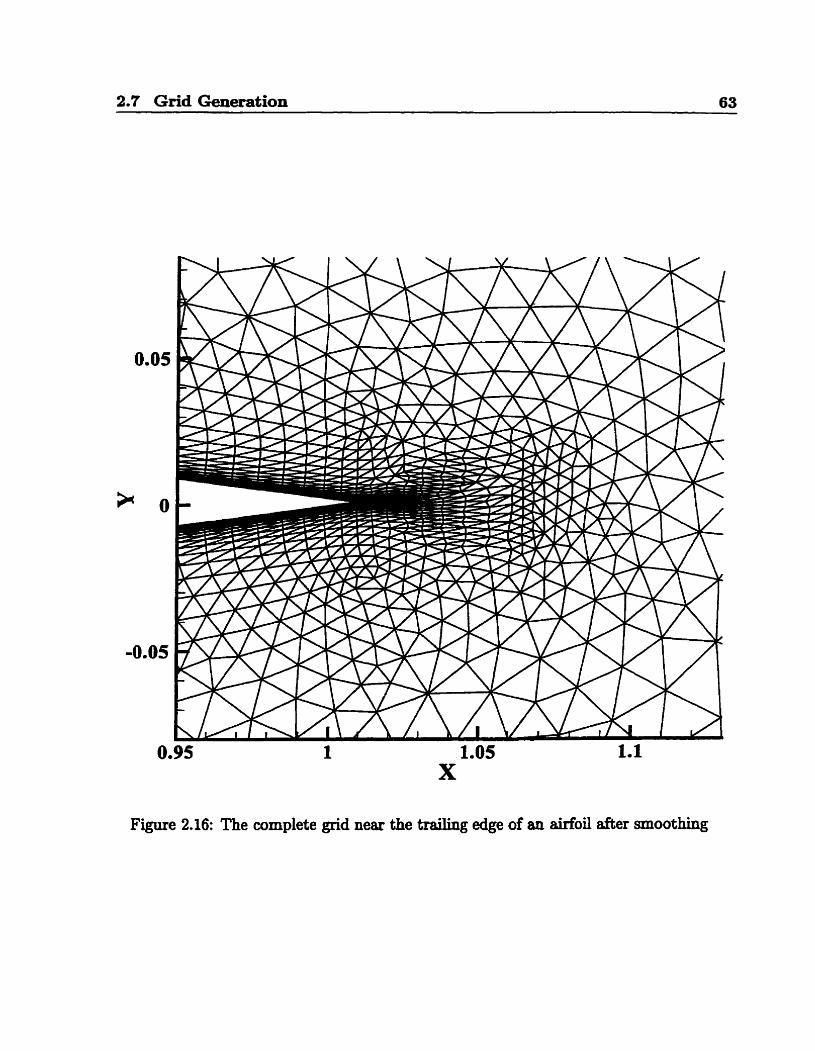
Abrupt changes in triangle aspect ratio and control volume irregularity can cause
inflated local tnincation errors. Although every effort has been made in the construction
of the grid generation process to ensure that smooth grids are consistently produced,
some irregularity may still remain. A smoothing filter based on the undivided first-order
approximation to the Laplacian operator is applied to the x,y location of each interior
node according to
Here, the smoothing factor w is less than UXUty and n represents the number of nearest
neighbour nodes i to the central node of the control volume k. The parameter is the
control volume stretching factor, which is the ratio of the largest to the srnailest distance
fiom node k to a node i. This factor is included to prevent undesirable reductions in
normal node spacing in high-aspect-ratio regions that contain control volumes of a concave
nature. The trailing edge region of Figure 2.15 is shown after 10 sweeps of the smoothing
filter in Figure 2.16.
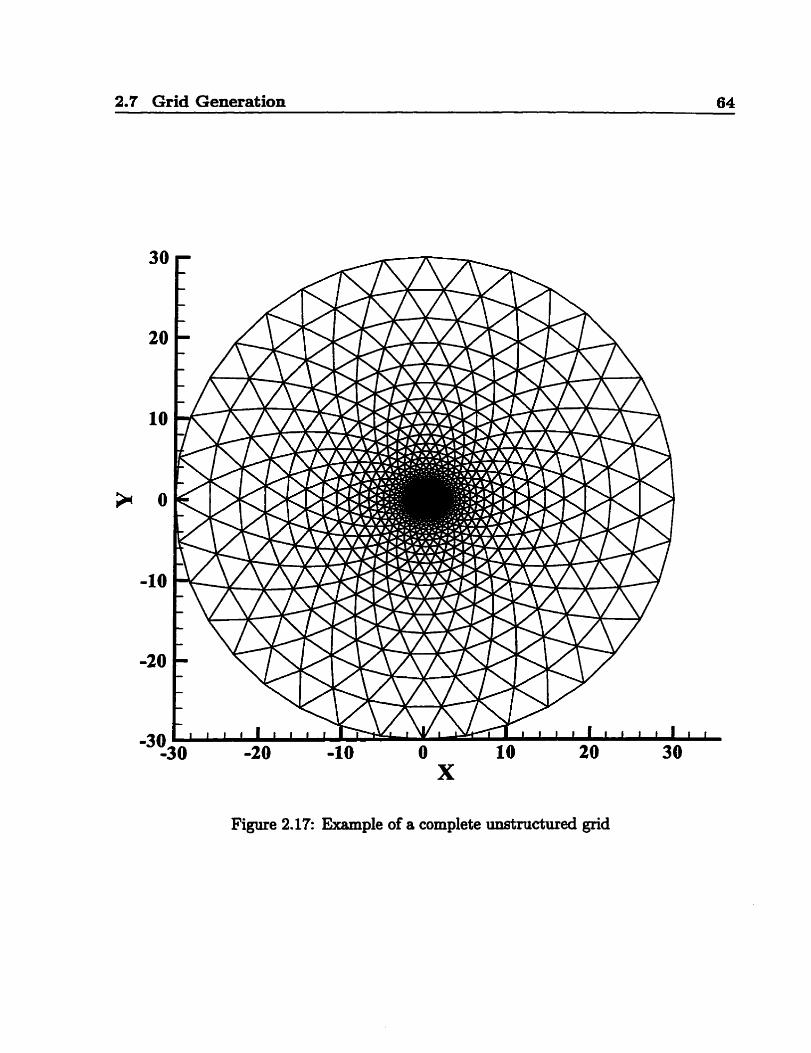
A complete grid showing both the b e r gnd and the outer boundary is presented
in Figure 2.17. This figure clearly demonstrates the disparity in node density between the
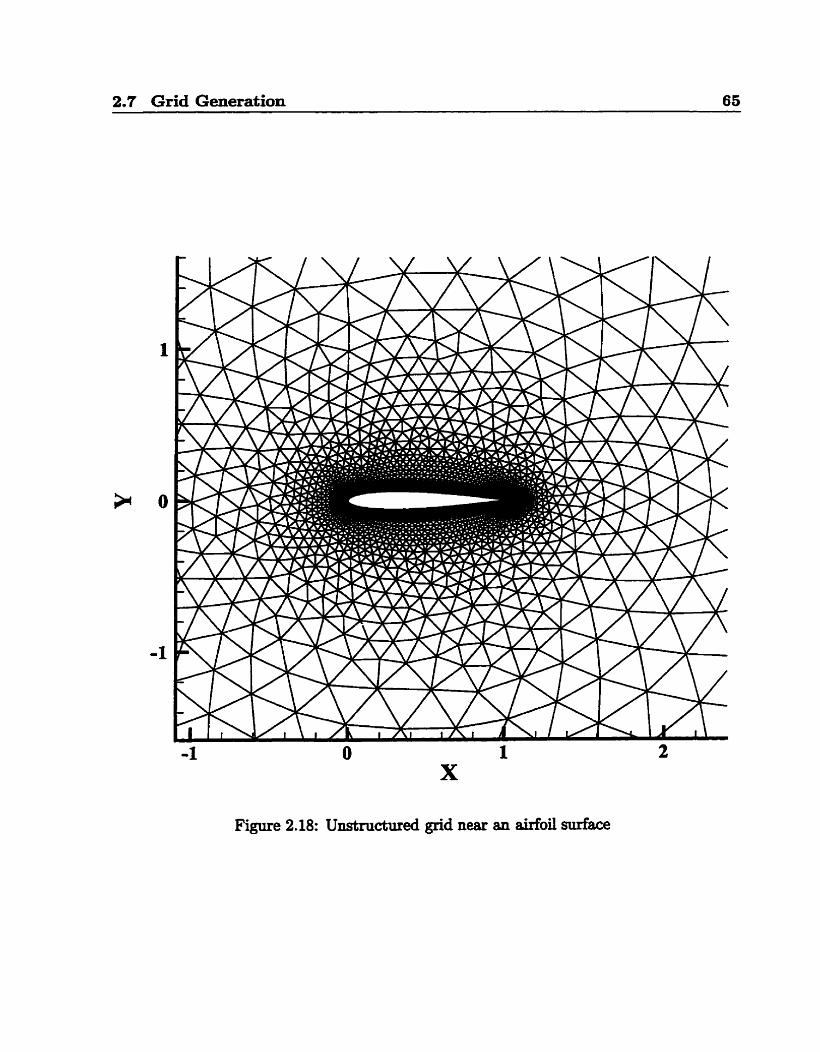
inner regions of the @d near the airfoil and the outer regions An enlargement of this
figure showing the details of the grid near the airfoil is given in Figure 2.18 . The triangles
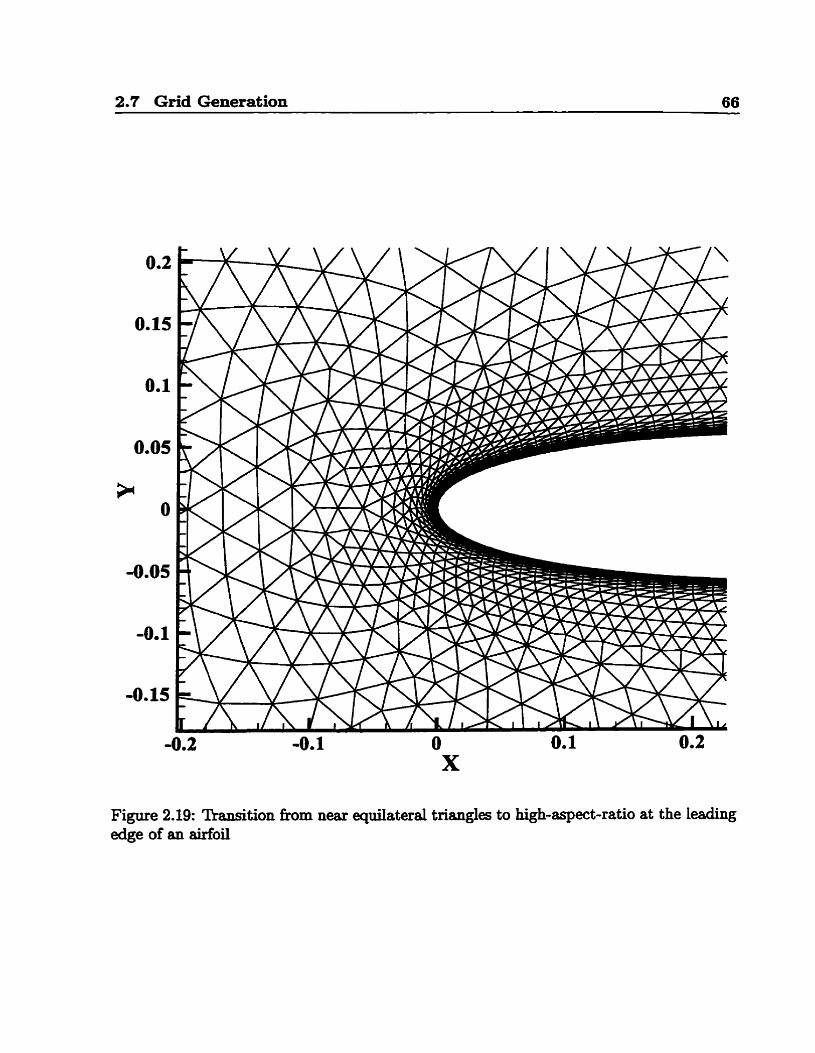
of the grid remain near equilateral over most of the computational domain. Figure 2.19
shows a further enlargement of the grid to reveal the details very close to the airfoil
surface. The transition from the near equilateral region to the high-aspect-ratio region is
done more gradually aRer the smoothhg filter is used.
Figure 2.13: Airfoi1 surface nodes showing Steiner vectors and gradations of off-wall spac-
Figure 2.14: PartialIy completed grid at the trailing edge of an aidoil showing the ad- vancing fiont after having completed the hi&-aspect-ratio region
Figure 2.15: The complete grid near the traüing edge of an airfoil before smoothing
Figure 2.16: The complete grid near the trailing edge of an airfoil after smoothing
2.7 Grid Generation 64
Figure 2.17: Exarnple of a complete unstmctured grid
2.7 Grid Generation 65
Figure 2.18: UIlStTUctured grid near an aufoil surface
2.7 Grid Generation 66
Figure 2.19: Thmition fiom near equilateral triangles to high-aspect-ratio at the leading edge of an Moi1
Chapter 3
Art ificial Dissipation
3.1 Motivation
The numerical algorithm outlined in the previous chapter describeci a method which com-
putes the temporal change of the dependent flow variables inside a control volume. The
value of each flow field parameter was shown to be a function of the flux through the
outer boundary of each control volume. The implications of this method is that the value
of each flow field variable is dependent on the values of its nearest nodal neighbours only,
and not on its own value. This characteristic is analogous to a central differencing approx-
imation of a fi& derivative term often used in the finite difference discretization method.
On stmctured grids central differences a p p r h a t e fi& derivatives by computing the
difference between the variables (4) on either side of a aven node and dividing by twice
the node spacing (Az),
Central Merencing achemes on uni fody spaced e d s maintain second order spatial
accuracy. This meam that the first tnincation error term of this difference method is
scaled by e, and contains the third derivatives of the field variables.
Due to the similari@ in construction, tmcation error, and stability, the finite
volume method ontlined in section 2.3 is commonly referred to as a centrd dinerencing
type fordation. The truncation error of the h i t e volume method which was used to
3.1 Motivation 68
discretize the conservation equations, is denved in Appendùc B. On smooth grids the trun-
cation error is similar to the centrai dineremhg scheme in the order of the error terms
present. Second derivative t e m are again completely absent and third derivative t e m
are the first tnuication error terms seen. Second derivative terms appear in the conser-
vation equations as difFusive phenornena, which has the effect of reducing high gradients
and dispersing any local extrema of the field variables. The absence of such damping
effects in the truncation te- leads to numerical instsbility, where s m d fluctuations in
the solution c m grow without bound as the scheme is rnarched in tirne [58]. One of the
possible instabiliw modes of an unstructured centml differencing finite volume method is
shown in Figure 3.1. Here, the values A and B represent two separate extreme values of
the field variables. The net Bux through each control volume is zero based on the linear
average of the control vohme boundary values. The field variables in each control volume
will not be altered and this osciuating field will be preserved. Additional smoothing in
the fonn of an artificial viscosity must be included to dissipate such error modes.
The purpose of artificid viscosity, or artificial dissipation as it is otherwise known,
is to simulate the error damping effécts of the d.BÛsive terms present in the consemation
equations. Once numerical stability is impsrted to the central differencing method, its sec-
ond order spatial accuracy can be used, as opposed to methods with inherent dissipation
but with lowa spatial accuracy. The diffusive effects of viscosity and thermal conductivity
create natural error damping in ail equations except the continuity equation. However,
this natural damping is confined to regions where viscous effects are well resolved and
sipnincant in value, such as in boundary layers and wakes. The majority of the computa-
tional domain is not influenced by the fluid viscosi@ and numerical instabilities remain
unchecked. An &&ive artificial dissipation method must therefore be effective over the
entire domain. The m o r mode shown in Figure 3.1 is of a high fiequency, mmeaning an
artificial dissipation scheme must also be of a local nature to control these high fkquency
components. In addition to such pmperties, an artincial dissipation method must also
3.1 Motivation 69
Figure 3.1: One error mode possible on an unstructureci grid; A and B are dinerent values of the local solution
remain dXbive with a low magnitude relative to the control volume flux. A dissipation
scheme with a large magnitude or one that introduces a convective component will not
preserve the original accuracy of the discretization method. Fhthermore, a dissipation
scheme must retain the conservative nature of the original governing equations. This is
achieved if the dissipation contribution made at a node by a neighbour i s equal in mag-
nitude and of oppusite sign to a sirnilm contribution made at a neighbouring node. In
so doing, the net flux created by the dissipation will sum to zero over the computational
domain. Not enforcing a conservative damping scheme may lead to the creation of spuri-
ous mas, momentwn, energy, or eddy viscosity. One final characteristic of concern in the
development of an artificial dissipation scheme is compntational &ciency. The dissipa-
tion parameter d l be evsluated repeatedly in the tirne marching process. Therefore, it
must be fairly simple in construction so as not to add signincantly to the computational
overhead of the complete algorithm.
3.2 Jarneson's Artificial Dissipation 70 -- - -
3.2 Jameson's Art ificial Dissipation
One of the fkst dissipation methods on unstructured grids wss proposed by Jarneson
[9, IO]. His dissipation method relies on a simple first order undividecl approximation to
the Laplacian of the field variables. The operator that he developed is easy to constmct
and accomodates the irregular nature of unstructured grids without Mculty. The Jame-
son dissipation operator is derived in a manner similar to h i t e diaerence derivations of
derivative t erms through judicious application of a two dimensional Taylor series.
An estimate of a field variable at node i (di) , obtained nom knowledge available
at node k, is determined through the Taylor series,
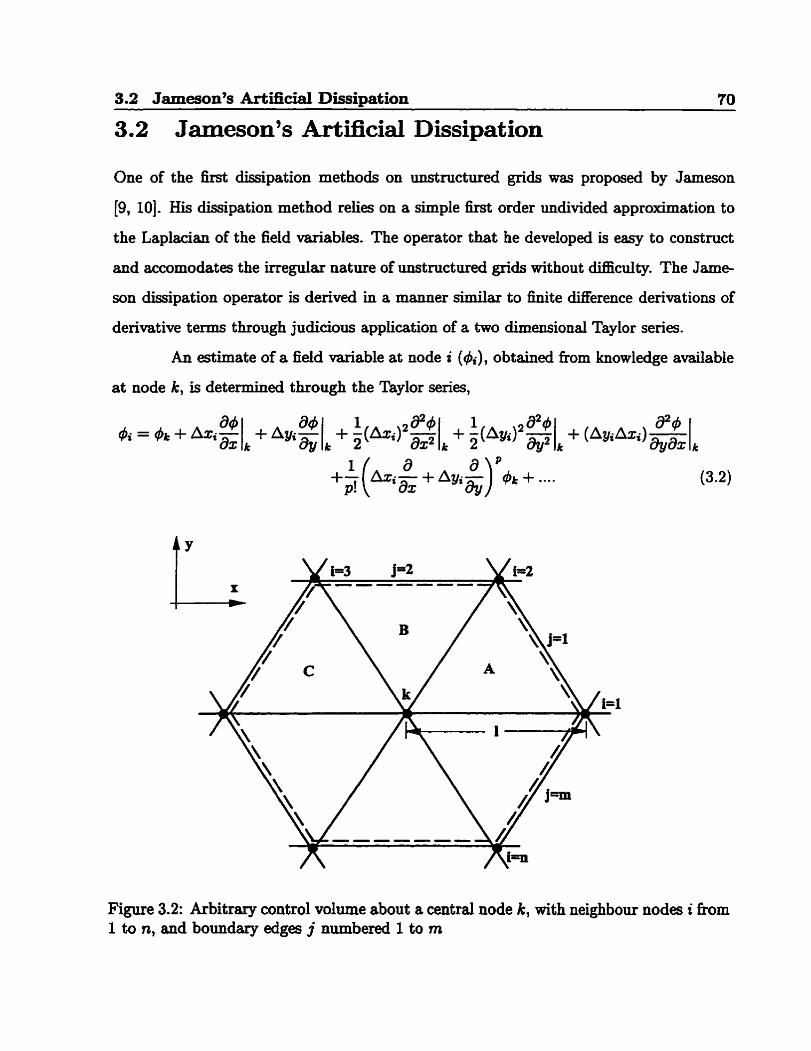
Figure 3.2: Arbitrary control volume about a centrai node k, with neighbour nodes i from 1 to n, and boundary edges j numbered 1 to m
3.2 JarnesonYs ArtifkW Dissipation 71
The distances hi and Agc are defhed as (xi - xk) and (yi - W) respectively. The
parameter p is evaluated h m 3 to W. Figure 3.2 shows a typical control volume on a
grid formed of equilateral triangles. An estimate of the field variables at each neighbour
node i can be obtained through application of equation (3.2) to each node. Siimming
these equations yields an approximation to the undivided Laplacian of the field variables
which has the form,
The length term 2 is the edge length of the smooth grid shown in Figure 3.2 . The presence
of a length parameter which is proportional to the control volume area ensures that the
damping operator scales with the control voLume size. This Laplacian estimate is referred
to as undivided when the dinerence summation, C(& - &), is not divided by a length
parameter to form a true Laplacian. The fourth order accuracy implied in equation (3.3)
is only a r d t of the regulari~ of a grid composed of quilateral triangles. If the grid is
irregular in nature, the dissipation operator is only first order accurate.
Jameson used the undivided Laplacian operator to dampen erroneous oscillations
that occurred near shock waves in transonic flow. Such flow discontinuities are highly non-
linear in nature and can generate substantial high frequency oscillations in the local flow
field. Jameson used the strong local darnpuig character of the undivided Laplacian at
the expense of the local order of accuacy of his model. The lower order nature of the
undivideci Laplscian reduces the local order of accuracy of the algorithm from second to
first order. For this reason the undivided Laplacian operator is used only in regions of
strong non-lineariw and a legs forceful, higher order biharmonic (V49) approximation is
used in fiee stream areas. The bihannonic operator is constructed as a double application
of the undivided Laplacian on local control volumes and theh neighbours according to
The undivided Laplacian and biharmonic operators are often referred to as second and
fourth dinerences, as a r e d t of their method of const~ction.
3.2 Jameson's Artficial Dissipation 72
A switching operator based on the locd flow field conditions must be present to
discriminate between the levels of damping required. This operator must be able to detect
the presence of fiow discontinuities and initiate the lower order damping in these regions
ody. The normalized udivided Laplacian oiC pressure is used to form this operator,
In regions of discontinuity this operator is of order 1, while in smooth regions it has a
small value. The constant k(*) is a user defineci parameter which controls the strength of
dissipation. In subsonic flow it is given a value of O, while in transonic flow a common
d u e is 0.5 [71, 72, 731. The fourth Merence damping term dZ (~JJ, has its own switching
operator to impose the higher order damping when the lower order second Merence
damping is not active,
The term k(4) is a user defineci parameter, which is set to a value of 0.01 for all cases
presented in this thesis unless otherwise stated.
The complete dissipation operator must be dimemiondy consistent with the
flux term of each equation before it can be included. The spectral radius &, introduced
in equation (2.60) is used to scale the dissipation operator and make it dimensionally
consistent to the residual in equation (2.55). The complete artincial dissipation operator
can be written as
The spectral radius and the pressure switclhing tenns are averaged betweeo the central
node k and its nearest neighbour nodes i to ensure that the dissipation operator is con-
semative.
3.3 Stretched Artificial Dissipation 73
3.3 Stretched Artificial Dissipation
Jarneson's artScid dissipation method provides effective damping on isotropie gnds of
near equilateral triangles which are used for inviscid flow modeiling. In viscous flows, the
grid will contain high-aspect-ratio anisotropic triangles near the airfoil d a c e in order to
accomodate the directional nature of the flow field in this region. An artficial dissipation
method that does not account for this possibility risks creating a damping tenn of the same
order of magnitude as the local flux tem, resulting in contamination of the local so!ution
[74]. On structured grids an artificial dissipation method was developed that adjusted the
magnitude of the damping term in the viscous regions based on the orientation of the grid
in the flow field [75,76]. This was acheived through the calculation of two different spectral
radii, one in each coordinate direction. If the coordinate directions in the structured @d
are and r) , the velocities in these coordinate directions are respectively u and v. The
convective spectral radius in each stmctured coordinate direction is
where a is the local speed of sound. An additional scaIing function is added to providecl
an even distribution of the dissipation, preserving the efEciency of the multigrid routine
[75]. The spectrai radii become,
where
a(,) = 1 + rai3.
The ratio of spectral radii r is d&ed as,
The artificial dissipation components in the < and q directions of the ~ t ~ C t ~ e d grid
can be d e d with the spectral radii as defined in (3.9), dowing the magnitude of the
dissipation to be d e d according to the local flow field character.
3.3 Stretched Artificial Dissipation 74
'I1ansIating the directional scaluig of the dissipation term fiom a çtmctured con-
text to an unstmctured one is not easily performed. Mavriplis found that a number of
sssumptions must be made about the relation between the spectral radius and the grid
orientation before a stretched dissipation operator could be applied to an unst ructured
grid [26]. He obsewed that the spectral radius formulation used on the unstructurecl
grid shown in equation (2.60) when applied to a structureci grid gave a value that was
approximately equal to the sum of spectral radii of the structured grid,
Mavriplis also reasoned that if the velocity components of the structurecl spectral radii
Ac and 4 were s m d in relation to the speed of sound, the ratio of spectral radii r of
equation (3.11) is approximately qua1 to the local grid aspect ratio AR,
The local aspect ratio on the strnctured grid is equated to a local stretching vector on the
unstructured mesh. The stretching vector S is defined by a point on the outer boundary
of the control volume that has the largest distance between it and the central node of the
control volume k. The magnitude of the stretching vector, s, is the ratio of the distance
between the furthest control volume boundary point and the closest. The stretching
vector is then related to the structureci grid aspect ratio by
The dissipation magnitude in the unstructured grid is scaled through the spectral radius
term. An dtered spectral radius is defined by Mavriplis to sccount for the variable control
volume shape according to
where
3.4 Higher Order Artaciai Dissipation 15
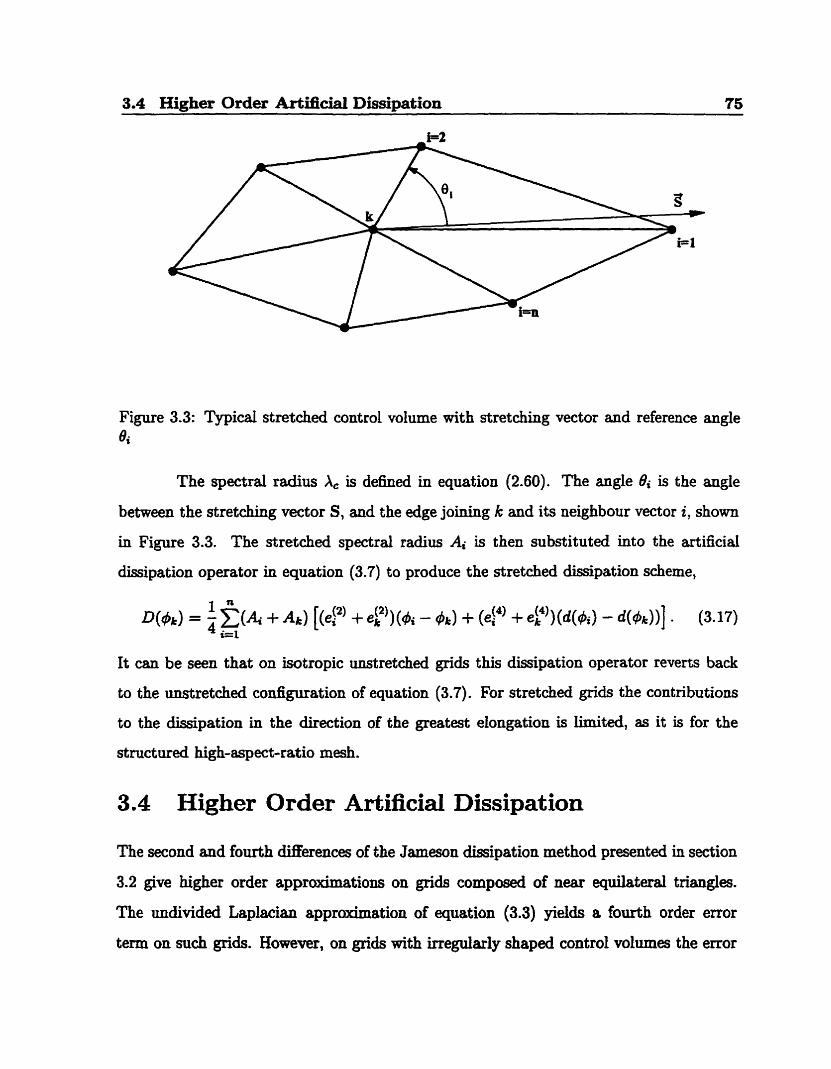
Figure 3.3: Typicd stretched control volume with stretching vector and reference angle 4
The spectral radius A, is defined in equation (2.60). The angle Bi is the angle
between the stretching vector S, and the edge joining k and its neighbour vector i, shown
in Figure 3.3. The stretched spectral radius 4 is then substituted into the artificial
dissipation operator in equation (3.7) to produce the stretched dissipation scheme,
It can be seen that on isotropie unstretched grids this dissipation operator reverts back
to the unstretched configuration of equation (3.7). For stretched grids the contributions
to the dissipation in the direction of the greatest eiongation is limited, as it is for the
structured high-aspect-ratio mesh.
3.4 Higher Order Artificial Dissipation
The second and fourth dineremes of the Jarneson dissipation method presented in section
3.2 give higher order approximations on grids c o m p d of near equilateral triangles.
The undivided Laplacian apprcnrimation of equation (3.3) yields a fourth order error
term on such grids. However, on gnds with irregularly shaped control volumes the e m r
3.4 Higher Order Artificial Dissipation 76
cancellation of the lower order terms in the Taylor series, which gives the higher order
approximation on the regular mesh, does not occur. The undivided Laplacian operator
will then approxhate not only the desirecl disapative terms, but also a number of first
order convective ones. The presence of these terms can create a significant contamination
of the local solution on irreguiar grids. Ideally, the dissipation operator should have a
negligible magnitude when the solution is smooth. In most cases the converged solution
wiII be a p p r h a t e l y linear over each control volume, and the dissipation should be s m d .
In the extreme case where the local solution is entirely h e a r , a dissipation method based
on a higher order Laplacian approximation will have a zero magnitude regardless of the
control volume shape. A dissipation method that approximates first order convective
tenns will have a non-zero magnitude in most such circumstances. The local solution
will be erroneously altered to compensate for the spurious flux created by lower order
dissipation methods which approximate these terms.
The potential for solution contamination by lower order dissipation has been in-
vestigated by Wilkinson [62] on a nurnber of irregular control volume shapes. An example
of which is shown in Figure 3.4. A two-dimemional Taylor series approximation can be
written for the solution at each neighbour node i in the same manner as was used for the
derivation of the difference expression of (3.3). Writing the resulting terms of the second
ciifference approximation yields the expression,
The fust term approximated by this difference expression on this control volume
is £imt order and convective in nature. A linear solution applied over such a control
volume can cause this dissipation operator to corrupt the local solution. As the gradient
on the linear solution inmeases, the magnitude of the dissipation operator will grow, even
through the local solution is linear. Near airfoi1 surfaces where gradients are relatively
high, irreguiar control volumes can reduce the 8ccuracy of the solution when a simple
clifference methad is used to a p p r h a t e diffusive terms.
3.4 Higher Order Artifidal Dissipation 77
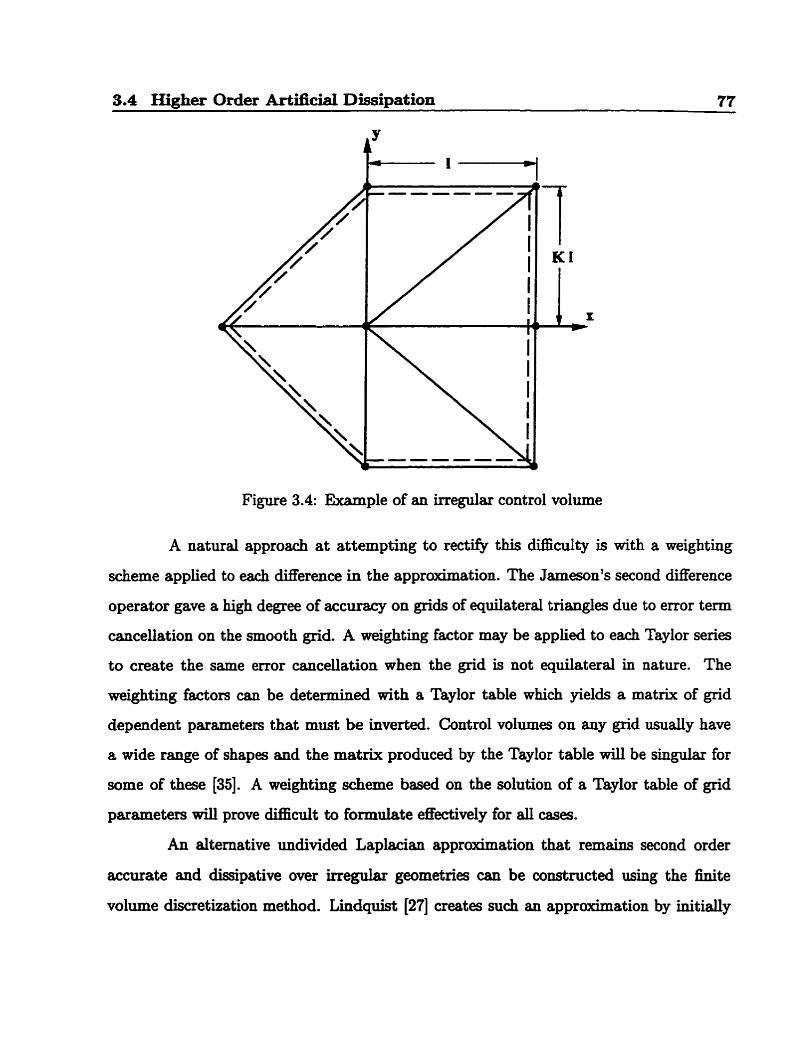
Figure 3.4: Example of an irregular control volume
A natural approach at attempting to rectify th% difliculty is with a weighting
scheme applied to each clifference in the approximation. The Jarneson's second difference
operator gave a high degree of accwacy on grids of equilateral triangles due to error term
cancellation on the smooth grid. A weighting factor may be applied to each Taylor series
to create the same error cancellation when the grid is not equilateral in nature. The
weighting factors can be determined with a Taylor table which yields a matrix of grid
dependent parameters that must be inverted. Control volumes on any grid usually have
a wide range of shapes and the matrix produced by the Taylor table will be singular for
some of these [35]. A weighting scheme based on the solution of a Taylor table of grid
parameters will prove difficutt to formulate effectively for all cases.
An alternative undivided Laplacian apprdmation that rem- second order
accurate and dissipative over irreguiar geornetries c m be constructeci using the finite
volume discretization method. Lindquist [27] creates such an approximation by initially
3.5 Higher Order Stretched Dissipation
reducing the Laplacian using,
The higher order second dinerence operator can be con~tnicted by discretization of the
right hand side,
This difference operator is determined through an integration of the first derivative con-
vective terms about a control volume boundary, similar to the f i t e volume discretization
method. The operator is not divided by the control volume area, yielding an undivided
Laplacian approximation. The convective terms on each boundary edge are evduated
over the triangular c d of the control volume that contains the edge. The derivative for-
mulations of equations (2.53) and (2.54) are used on each triangle of the control volume
with integration conducted over each t n ~ g l e boundary. Derivatives are edua ted on each
control volume triangle as opposed to the control volume of each boundary node for two
reasom. First, integration about the three edges of each triangle is less computationdy
intensive than integration about the approximately six edges that form an average con-
trol volume boundary. Second, determinhg the second difference expression using only
information fiom the control volume maintains the local nature of the operator. This
differencing method creates an operator that is second order accurate and entirely dissi-
pative. This can clearly be seen by considering an irrepuiar control volume over which an
entirely linear solution is imposed. The convective terms will be constant over the control
volume and integration will yield a zero value of the diffaence operator, regardless of
the control volume shape. The fourth Merence free stream smoothing operator can be
constructed by using the higher order second Merence formulation with equation (3.4).
3.5 Higher Order S tretched Dissipation
The undivided LaplaQan approximation presented in the previous section was shown to
give second order sccuracy on irregularly shaped control volumes. This has the potential
3.5 Higher Order Stretched Dissipation 79
to provided smooth, highly accurate solutions on complex unstructured grids that contain
considerable irregularity. Adapted grids can be expected to be more irregular than an
unadapted mesh as a result of the adapted node placement. An effective higher order
artificial dissipation will be a complement to an adaptive solver. It has been shown that
the higher order dissipation method provided in the previous section was able to maintain
the second order spatial accwacy of an unstmctured central Werencing type scheme on
an irregular mesh with inviscid flow [27].
This artificial dissipation method can however encounter instabilities on viçcous
problems. The high-aspect-ratio control volumes near the surface of aVfoils can cause the
magnitude of the dissipation term to be exaggerated, even when the grid is smooth. This
can be demonstrated by considering an arbitrary control vohme over which is imposed an
entirely linear solution; #(x, y) = az + by + c. At the central node of this control volume
an error of magnitude is added (see Figure 3.5). Following the numbering scheme shown
in Figure 3.2, the first derivative terms at ceil A are cornputeci,
where AA is the area of triangle A. Simüar expressions are denved for each of the other
edges about the control volume. The higher order second Merence expression can be
created using equation (3.20). The contribution to the second ciifference from edge 1-2 is,
Summing all of the contributions fkom each edge leads to the final second difference
expression,
3.5 Higher Order Stretched Dissipation 80
Figure 3.5: Error imposed on an arbitrary control volume
where 112 is the length of the edge fkom node 1 to node 2. This second difference expression
appears as would be expected, with the magnitude of the expression proportional to the
error magnitude. However, there is an additional grid geometry dependent term. This
term has the effect of amphfjhg the dissipation magnitude as the control volume aspect
ratio increases. If the arbitrary control volume of Figure 3.2 is compresseci in the vertical
direction, the triangle areas will decrease. In the Mt as the aspect ratio approaches
infini@, this amplification term will also approach infini@ as the triangle areas go to zero
and the edge lengths near a constant value. Rom this it is clear that in viscous regions
of the flow fidd that contain high aspect ratio ce& the higher order dissipation of the
previous section will be very dissipative.
It should be noted hocRever, that the amplification effect of this method is entirely
a function of the grid geometry. This permits an opportunity to develop a correction factor
based on this term that csn be applied to this dissipation method, allowing it to be used
in viscous flows. The ampUcation term can be calculated once when the algorithm is
initialized and applied to esch subsequent dissipation calculation. The final corrected
3.5 Higher Order Stretched Dissi~afion 81
higher order undivided Laplacian approximation can be written as,
The higher order nature of this artincial dissipation method with the amplification
correction c m be demonstrated with the calculation of a flow field problern. The pressure
field is computed near the trailing edge of a NACA 0012 aidoil using both the stretched
iower order dissipation and the higher order method. The free stream Mach number is
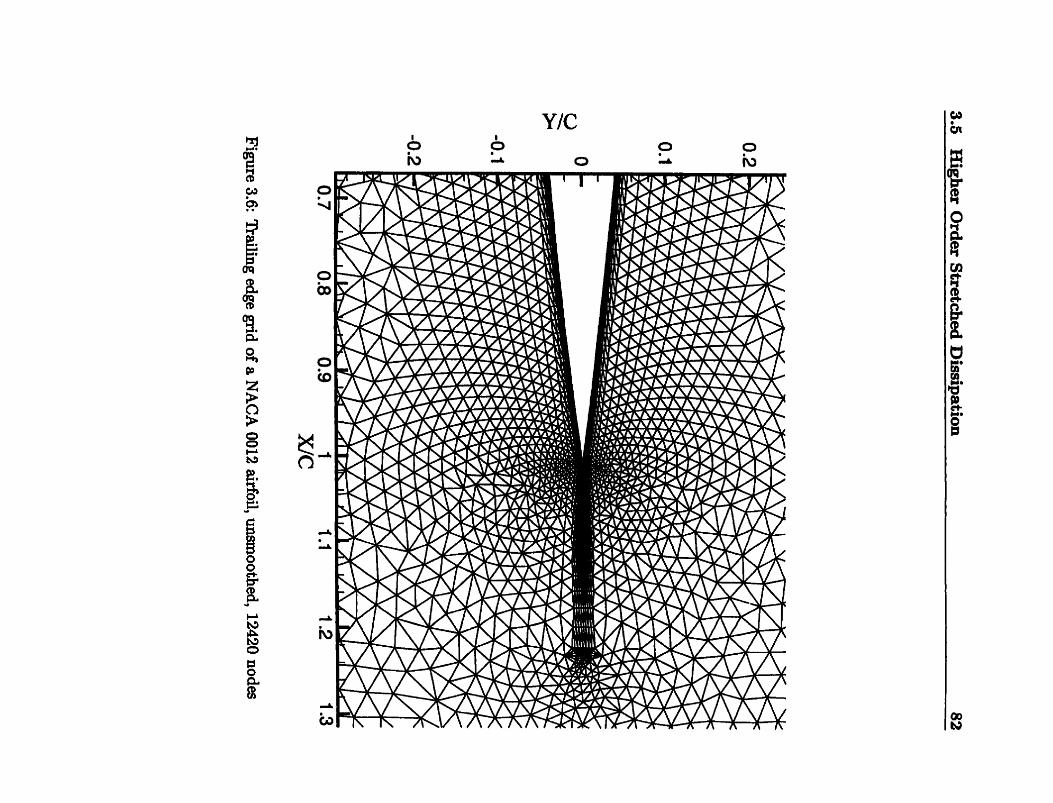
0.5 at 0.0 degrees angle of attack with a Reynolds number of 5000. Figure 3.6 shows the
tail region of the unsmoothed grid which contains numerous irregular control volumes.
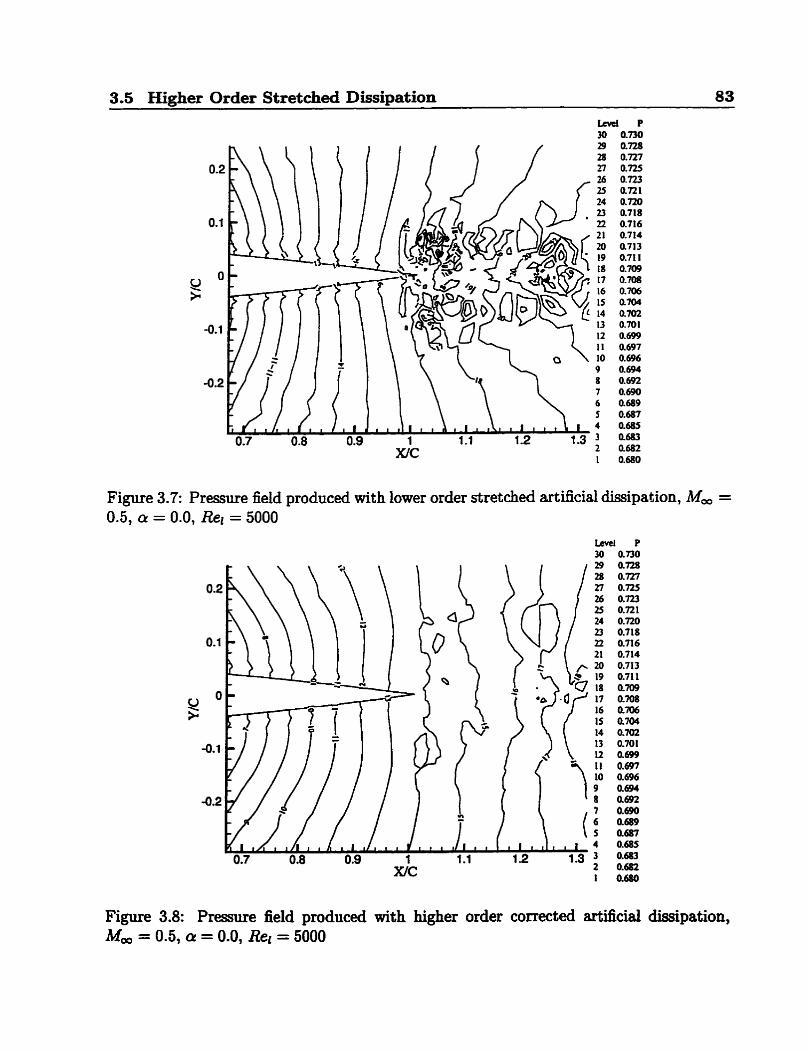
The pressure field determineci using the stretched artificial dissipation method of section
3.3 is given in Figure 3.7. The corresponding pressure field computed with the higher
order corrected method is shown in Figure 3.8. The flow field about this airfoil is fkee of
shockwaves and should have a smoothly varying pressure field. The higher order corrected
dissipation produces a smoother pressure field than its lower order counterpart. This
suggests that the higher order method is less sensitive to the irregular control volumes
and high gradients present near the trading edge of this case.
3.5 Higher Order Stretched Dissipation 83
Figure 3.7: Pressure field produced with lower order stretched artificiai dissipation, M, = 0.5, ai = 0.0, Rel = 5000
Figure 3.8: Pressure field produced with higher order correctecl artificial dissipation, M . = 0.5, O = 0.0, Rer = 5000
Chapter 4
Solution Adaptation
4.1 Motivation
The local truncation error in a numerical mode1 based on a central Merence f i t e volume
scherne is presented in Appendix B. The leading error terms are proportional to the second
and third derivatives of the total flux components in the x and y directions, and to the grid
conûguration expresseci through local edge length parameters. Reducing the local error for
a given problem has traditionally been accomplished through either a local Unprovernent
in the order of accuracy of the discretkation method itself or with some alteration of the
local grid characteristics. In this research, error reduction is achieved through refinement
of the grid using local node addition. Inserting an additionai node at the midpoint of each
edge in the grid will reduce each grid length parameter appearing in the truncation error
by half. In this manner the local t ~ n c a t i o n error can be reduced uniformly over the entire
grid in a 'global refinement' process. Although a global rehement is assureci of improving
the solution accuracy, renning each edge of an unstructured grid will inctease the number
of nodes by a factor of four, and substantidy increase the computational effort needed
for a solution. Repeated global refinements will only compound this increase in effort.
When it is considered that the laxgest truncation errors are predominantly located in or
nesr boundary layers, d e s , shock waves, and stagnation points, the wastefulness of a
global refinement becornes apparent. Additional nodes placed in free stream or smooth
regions of fiow have little influence on the global solution accuracy. If the edge refinement
4.2 Adaptation parameters 85
process is directed to occur in regions expected to contain a relativeiy high degree of
error only, the number of nodes needed for a global increase in accuracy will be less than
that of the global refhement. The process of detecting the error and locally refining and
restructuring the grid is the essence of the adaptive gridding process presented in this
t hesis .
Adaptive gridding in a h i t e volume soIver can be conducted using either a node-
additive (h-adaptive) method, or in a node-redistibutive ( r-adaptive) manner [24]. The
node-redistribution method does not insert additional nodes into the mesh but simply
rnoves the preemsting ones in an attempt at local error reduction. The improvement in
solution accuracy in one region may corne at the expense of another region as nodes are
removed fiom it. One common method of implementation of such schemes is with the
spring analogy formulation, where the edges that join a node to its nearest neighbours
are considered to act as springs. The spring constants are proportional to the local error
estimate on the edge, causing the edge iength to be shortened as an equilibriurn position
is found [53, 51, 781. The nodeadditive method introduces new nodes into the grid at
points specified by a local error indicator. New nodes are located at the midpoint of each
edge that is found to have a high levei error associated with it. Once all of the designated
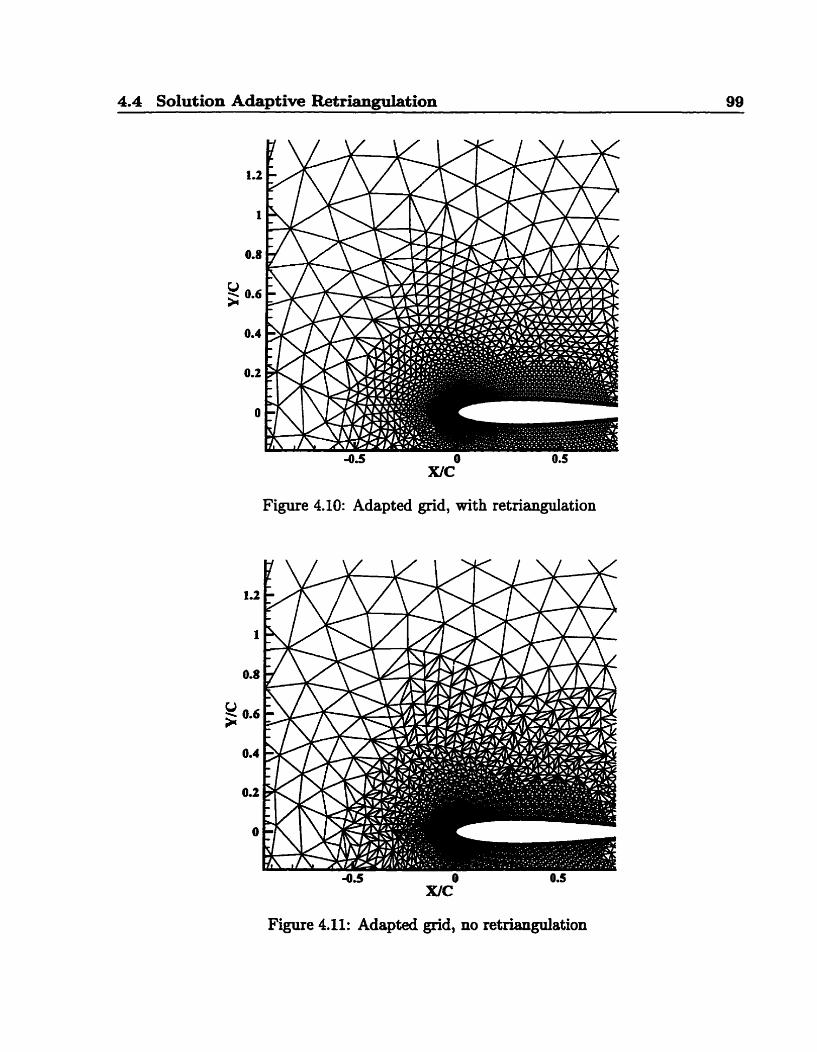
edges have been rehed, the grid edges are reoriented to recover a smooth configuration
in a process referred to as retriangulation. The details of the adaptive gridding routine
used in this algorithm are presented in the following sections.
4.2 Adaptation parameters
The primary adaptation tool of this algorithm is a node-additive scheme. The adaptation
procers begins with the partidy convergeci solution on the finest grid. Convergence is
indicated by the summation over all control volumes in the computational domain of the
residuals of the mass conservation equation. Typically, when this total residual &op 1.5
orders of magnitude £kom its initial value, adaptation is initiated. Critical features of the
4.2 Adaptation parameters 86
solution, such as boundary layers, wakes, and shock waves, will be well developed by this
point. Convergence hom the start dom to this level of residual is usuaily quite rapid
as the low fiequency errors are removed quickly by the multigrid routine. Any further
time marching beyond this IeveI will not contribute to the effectiveness of the adaptation
routine and will only consume computational resources. Fiirthermore, the final solution
will be obtained on the adapted grid, therefore, as Little effort as possible should be spent
on any intermediate grid.
The adaptation routine begins with the complete reproduction of the grid and
solution in the cornputer memory. The new adapted grid will be generated nom the
copied version. A completely new grid is created since the adapted grid wiil become the
new finest grid in the multigrid sequence. After the grid and solution are copied, the
adaptation proceeds with the selection of edges for rehernent. The edges selected are
determined by the dculation of an adaptation panuneter on each edge. The value of
the parameter gives an indication of the prionty assignecl to this edge in the adaptation
hierarchy. The adaptation parameter of each edge is then placed in descending numerical
order. A specific number of edga are selected by the user for adaptation. The multigrid
routine has providecl effective convergence acceleration when unadapted gnds have had an
appraimate four-fold increase in the number of nodes fkom coaRest to finest. In general,
this rate of increase in node density is maintained as new adapted @ds are generated.
Creating a factor of four increase in the number of nodes as a new adapted grid is created
would require that every edge in the parent grid be selected for adaptation. Since this will
defeat the purpose of adaptive gridding, adaptation is conducted in two passes. The user
WU specify the percentage of nodes to be selected in each pass as a &action of the total
number of edges in the parent grid. The adaptation passes are conducted consecutively
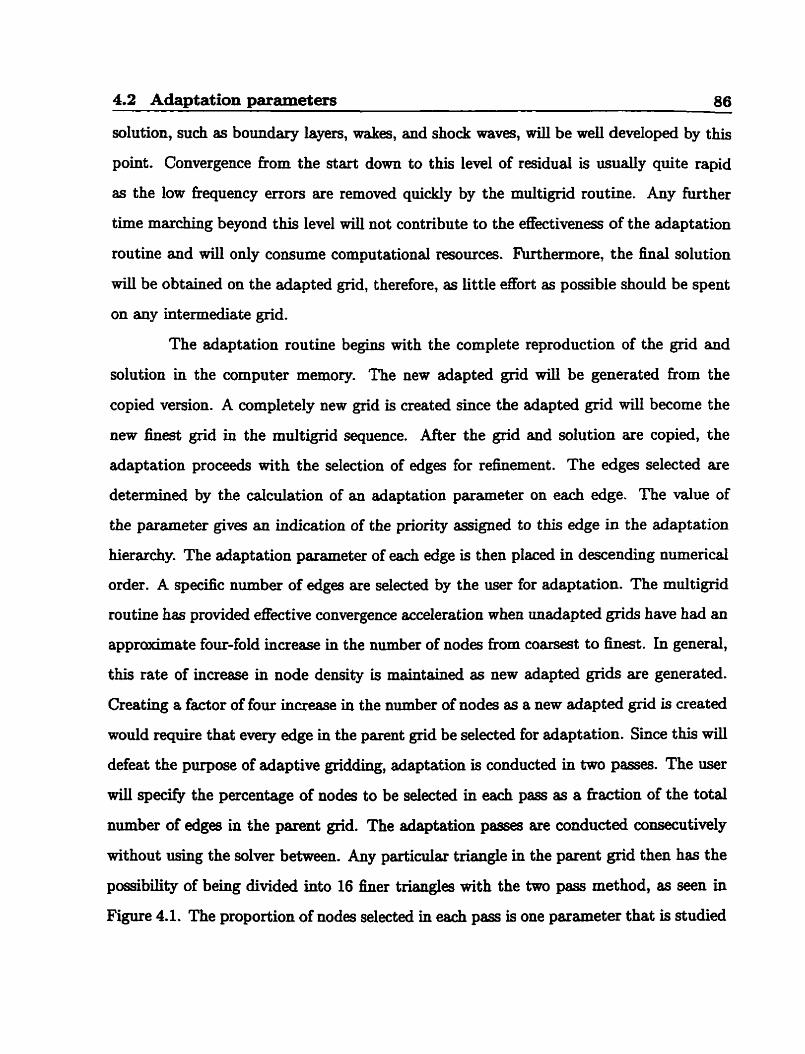
without using the solver between. Any particular triangle in the parent grid then has the
pmibility of being divided into 16 finer triangles with the two p a s method, as seen in
Figure 4.1. The proportion of nodes selected in each pass is one parameter that is studied
4.2 Adaptation parameters 87
for its effect on solution iu:curacy in Chapter 5.
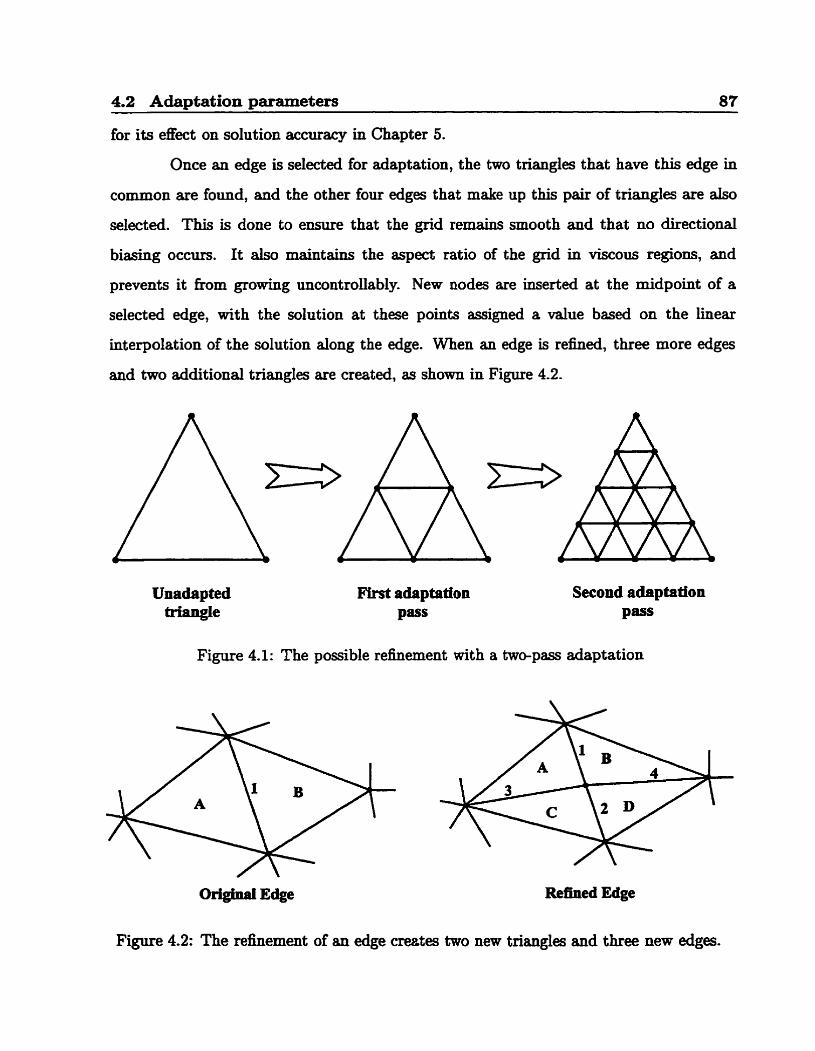
Once an edge is selected for adaptation, the two triangles that have this edge in
common are found, and the other four edges that make up this pair of triangles are also
selected. This is done to ensure that the grid remains smooth and that no directional
biasing occurs. It also maintains the aspect ratio of the grid in viscous regions, and
prevents it fkom growing uncontroIlably. New nodes are inserted at the midpoint of a
selected edge, with the soiution at these points assigned a value based on the h e a r
interpolation of the solution dong the edge. When an edge is refined, three more edges
and two additional triangles are created, as shown in Figure 4.2.
Unadapted triangle
First adaptation P*S
Second adaptation P=s
Figure 4.1: The possible rehernent with a two-pass adaptation
Figure 4.2: The refineement of an edge creetes two new triangles and three new edges.
4.2 Adaptation parameters 88
The adaptation parameter can be calculated using any one of a number of philoso-
phies. The parameter is intended as an estimate of the error in the solution resulting hom
the local grid contiguration. The direct approach to the creation of an adaptation pa-
rameter wodd be a calculation of the local tnincation error of the spatial discretization.
Appendùr B gives an estimate of such an error term. The truncation error contains second
and third derivatives of the flux temm scaled with terms dependent on the local grid con-
figuration. The tmcation error is not a practical choice for the adaptation parameter in
this algorithm for several reasons. First, calculation of both the second and third deriva-
tive flux terms wilI be necessary since the grid dependent scaling terms on the second
derivatives will vanish in the presence of grids composed of near quilaterd triangles. On
inviscid portions of the flow field the grid will be c o m p d entirely of near equilateral
triangles. Secondly, a significant amount of computational effort will be needed to deter-
mine second and third derivatives of the flux components at each node. A least squares
polynomial approximation using the solution obtained from the surrounding grid cm be
created that will permit the evaluation of second and third order derivatives However,
such rnethods may s d e r fiom inaccuracies, especially near flow discontinuities like shoek
mves. The third difEculty encolmtered when using the truncation error as an adaptation
parameter results fkom increased sensitivity. Since the adaptation routine uses a partially
converged solution as a staxting point, some high frequency error d still rernain. For
an error of hed magnitude the second and third derivatives of the solution will give in-
creasingly larger values. This can be demonstrated by considering a one-dimensional gid
with sn erroneous solution imposed on it of the fom,
where A is the amplitude and 1 the wave length. Second and third derivatives of this
solution will yield the following values,
4.2 Adaptation parameters 89
As the wavelength shrinks, the amplitude of the second and third derivatives of the
solution will grow considerably. An adaptation parameter using such terms will have
an exaggerated magnitude compared to the amplitude of the error. In this instance,
adaptation will be driven by the high frequency error and less by the flow field features.
Additional nodes may well be placed in regions that in fact are found to be well resolved
without them, thereby wasting computational effort. Fùrthermore, a greater degree of
convergence prior to adaptation is not always successful at removing difEculties of this
nature. The caldation of the second and third derivative components of the leading
truncation error terms assumes that the continuous solution of the flow field is known.
If this known continuous solution is apprcarllnated with the numerical solution, as would
be the case, any discontinuities in the numerical result may lead to inflated estimates of
truncation error. This algorit hm produces piecewise linear continuie between triangles,
but not continuity of slope. On a coarse grid a M y converged solution may have slight
discontinuities in slope between triangles sufficient to cause erroneous estimates of the
second and third derivative tnuication error components.
Another possible adaptation parameter assumes that bcal error is associated with
the rate of change of the flow variables, and uses the field gradients dong each edge of
the domain. These are easily computed dong each edge by differencing the field variable
(q) between the two nodes that d e h e an edge (i j) and nomaliPng by the edge length 2
Unlike second and third derivative approximations which can contain some error, terms
computed in this rnanner are an exact representation of the derivative of the field variables
dong an edge since the numerid solution given on each edge is linear. However, an adap
tation parameter based on first derivatives wiU suffer fiom the same error exaggeration as
the tnuication term parameter, although to a lesser extent. One critical dificul@ expe-
rienced when using flow gradients as adaptation parameters was investigated by Warren
et al. [43]. They found that repeated adaptations would place new nodes at the same
4.2 Adaptation parameters 90
location in the %ow field, regardless of the local level of refinement. Once an edge was
selected for adaptation, the new node placed at its midpoint would be given field variables
based on the linear average of the values at the edge endpoints. The two new edges will
then have exactly the same field gradients as the original edge. Consecutive adaptations
using gradients to dwct refinement wiU then be confined to the same features in the
flow field. Idedy, an adaptation parameter should be rdective of the local level of error
reduction with repeated refinement. As additional nodes are placed in a region, the local
truncation error wi l l be reduced. An adaptation parameter that reduces its value to reflect
the improved local resolution will permit repeated adaptations to redirect refinement to
regions that then become the most under resolved.
The difEculty ansociated with the edge gradient as an adaptation parameter stems
from the fact it is divided by the edge length. Under repeated adaptations the edge length
will be reduced by the same factor as the fieId variable clifference, thereby preserving the
value of the gradient. An alternative formulation is to omit the edge length and adapt
on an undivideci dinerence. An adaptation parameter based on undivided differences will
require very little computational expense. It will also maintain a fixeci magnitude in
the presence of an oscülating error of constant amplitude, regardless of the wavelength.
F'urthermore, the undivided difference will drop in magnitude after repeated adaptations
on a given solution, similar to the expected behaviour of the actuai tnincation error after
such rehernents.
An adaptation parameter based on undivided Merences can use any of the a d -
able flow field variables. Numerical experiments on inviscid aerodynamic problems have
been conducted by Dannenhoffer [42] to determine the the most effective adaptation vari-
able. It was found that undivided differences of density were able to provide smooth
adapted regions and the m a t rapid convergence for a giwn level of arxuracy. In addi-
tion, it was also found that adaptation on second differences, similar to the Laplscian
approximation in artificial dissipation, created irregularly shaped adapted regions which
4.3 M o i l Boundary Adaptation 91
adversely effected the convergence rate. In the present algorith, a number of variables,
including densi@, pressure, Mach number, and vorticity, will be studied as adaptation pa-
rameters for their influence on solution accuracy for a given level of computational effort.
The undividecl clifference used as an adaptation panuneter (O) in this study, computed
between the two nodes ( i j ) that define an edge, will have the form
In this instance the parameter is calculateci as the combined dinerences of density ( p )
and Mach number (M) nomalized by the extreme Merence value over the grid. The
merences are normalized to d o w combinations of severd variables in the formation of
the adaptation parameter.
Airfoil Boundary Adaptation
Far fiom an airfoil surfice, a new node added through adaptation is simply placed at
the midpoint of an edge. On airfoil surfaces new nodes must proceed through a more
complex procedure. The edges that form the airfoil swface are an approximation to the
tme aidoil shape. The sctud shape of the aidoil is represented by a series of spline c w e s
that span the distance between the nodes that form the airfoil body 1791. If a new node is
added to the midpoint of an edge that forms the airfoi1 body, the original approximation
is preserved and not refined. Zn order to improve the aVfoil shape appromation, the
new nodes added to the Moi1 edges must be moved into the midspan locations suggested
by the spline curves. However, this may create difEculties on high-Reynolds-number
flows where the normal OW spacing of nodes is very s m d . The movement of the new
boundary node into the interior of the domain may cross pre-e)Listing edges. This problem
is graphically presented in Figure 4.3, where a section of the grid at an airfoil boundary is
shown. The spline representation of the Moi1 is shown as a broken line. The edges that
approurimate the airfoil surface are the heavy lines at the base of the grid. The location of
a new boundary point specined by the spline curve is indicated. Clearly, if a new node is
4.3 M o i l Boundary Adaptation 92
plsced at the midpoint of the boundary edge show, and moved to the location indicated
by the spline curve, a number of edges wil l be crossed over and the grid will be defective.
To overcome this difliculty, Mavriplis [50] developed a method of displacing ail
of the edges above these problematic boundary nodes. A line is & a m from the new
midpoint node in Figure 4.4, normal to the original edge into the interior of the corn-
putational domain. The edges that are crossed and the points of intersection on these
edges are recorded. The distance between the new midpoint node and its ha1 location
specified by the spline curve is caUed the reference length. The distance between the
new midpoint node and the h t intersection point of a crossed edge is computeâ. If this
distance is greater than twice the reference length, then the routine is terminated and the
new point is simply inserted at the boundary edge midpoint and moved into its proper
location. However, if this distance is l e s than twice the reference length then there is a
possibility of creating crossed edges or triangles with areas near zero. In this instance,
the distance between the next pair of intersection points dong the normal h e is deter-
mined. Consecutive pairs of intersecting points are checked until their spacing is twice
the refewice distance. At th.& point the process is stopped snd ail edges crossed have
new nodes inserted at their intersection points. This column of nodes is moved with the
new boundary node as it is placed in its proper location. The new grid configuration will
then be the defect fiee mesh shown in Figure 4.5.
Figure 4.3: The portion of the grid forming the d o i l boundary. A new node is to be inserted at the body edge midpoint.
4.3 M o i l Boundary Adaptation 94
- New boundary point 0 - Normal Une intersedon point
- - Airfofl body approximation - - - Splhe curve
Figure 4.4: A line normal to the boundary edge is drawn through the interior grid, marking points of intersection.
Figure 4.5: The new boundary node is moved to the location specsed by the sphe routine, the column of nodes above it moves in conjunction.
4.4 Solution Adaptive Retriangulation 95
4.4 Solution Adaptive Retriangulation
Once additional nodes have been introduced into the grid in an adaptation procedure,
the srnoothness of the original grid is usually lost. The @cl edge orientation that resulted
in control volumes of approximately six near equilaterd triangles will most certainly be
dismpted. It was shom in Appendix B that control volumes composed of six near-
equilateral triangles attain a second order spatial accuracy. In order to preseme this
spatial accwacy on inviscid portions of the flow field, the edges of the adapted grid must
be re-oriented in a retriangulation process to recover an equilateral configuration. The
Minmax triangulation procedure described in section 2.7 was used to generate grids of
near eqdaterd triangles. This routine is used again in the adaptive gridding procedure
to recover the eqda te rd configuration.
The Minmax retriangulation is imposed tbough a global edge swapping routine.
Every non-boundary edge is assessed to determine if it meets the Minmax criterion. This
is done by considering the pair of triangles that have a given edge in C O ~ O ~ , as shown
in Figure 4.6. The common edge is in one of two possible configurations, the second
configuration in the figure is represented by the broken %e. The largest of the six intenor
angles of both configurations is determined, and the orientation that minimizes this angle
conforms to the Minmax criterion. Every interior edge in the computational domain is
assessecl in this manner until no more edges need to be reconfigured.
On inviscid regions of the flow field the Minmax retriangdation will easily recover
a near-equilangular grid. In regions of the grid expected to be dominated by viscous ef-
fects, the grïd is characterized by stretched high-aspect-ratio triangles. The sdaptive
gridding routine can disrupt the structured node placement of this region in such a man-
ner that the Minmax retriangulation procedure creates near-equilateral triangles as it
does in the inviscid regions. For example, Figure 4.7 shows a high-aspect-ratio portion of
a grid near an airfoil. A new node is added which introduces a degree of irrepuiarity into
the local node placement. The Minmax retriangulation, shown in Figure 4.8, generates
4.4 Solution Adaptive RetrianRulation 96
Figure 4.6: The angles considered in the Minmax edge-swapping triangulation. The broken line indicates the other possible edge configuration.
near-equilateral triangles in regions where the grid is expected to be highly stretched.
The presence of such triangles within boundary layer regions will introduce severe tm-
cation error. To prevent the possibili3 of such undesirable retriangulations, the grid is
stretched in the direction of the local Mach number gradient before the retrianguiation is
implemented. Once the Minmax criterion is imposed, the grid nodes are returned to their
previous location. Initially, the gradient of the Mach number is found on the four nodes
of the pair of tnmgles that shsse a common edge. These values are averaged to give one
pair of derivatives valid on the edge itself (M,,M,). The stretching parameter Si is used
to temporarily place the four nodes in their stretched locations (X,',Y;.'),
The lengths Axi and Ayi are the distaces in the z,y coordinate directions fiom the
midpoint of the edge to each of the four surrounding nodes. The location X,O,y,O is the
original location of the node. The term 1 is the length of the edge, and ( is a small positive
value used to avoid singularities. The factor C is used to s a l e the stretching effect and
is set at a value of 2.0. The resulting grid &ter the stretched Minmax retriangdation is
shown in Figure 4.9. The grid retaim the stretched nature desired in the viscous regions.
Table 5.16: Drag r d t s using higher order damping
Name nacaal n a d
Coefficient 0.0699 0.0577
Coefficient 0.0365 0.0241
Coefficient 0.0334 0.0336
5.3 Case 2: NACA 0012 125
Table 5.17: Absolute value of the percent error of drag results using higher order darnping
'
Table 5.18: Drag results after adaptive gridding and higher order damping
Grid Name
nacabl nacab2 nacab3 nacab4 nacab5
% Pressure Drag Error 58.00 4.33 0.43 0.43 0.00
% Total Drag Error 24.38 2-67 0.53 0.36 0.00
Friction Drag Coefficj eüt 1 0.0331
Table 5.19: Absolute value of the drag error after adaptive gridding and higher order
% F'riction Drag Error 0.91 1.51 1.21 0.30 0.00
Pressure Drag Coefficient
Grid Nodes
damping
Totd Drag Coefficient
% Nction Drag Error 1.21 0-00
2944 10932
% Pressure Drag Error 1.30 0.43
Grid Nodes 2944 10932
% Total Drag Error 1.25 0.18
0.0569 0.0563
0.0234 0.0232
5.3 Case 2: NACA 0012 126
Figure 5.18: Mach number field about the NACA 0012 airfoil using grid nacab3
Figure 5.19: Cornparison of absolute total drag between lower and higher order artifkial dissipation and adaptive gridding, N = number of grid nodes
5.3 Case 2: NACA 0012 127
Figure 5.20: Comparison of absolute pressure drag between lower and higher order arti- ficid dissipation and adaptive gridding, N = number of grid nodes
Figure 5.21: Comparison of absolute friction drag between lower and higher order artScia.1 dissipation and adaptive gridding, N = nnmber of grid nodes
5.3 Case 2: NACA 0012 128
Figure 5.22: Surface pressure coefficient using the higher order artificial dissipation on grid nacab2
Figure 5.23: Surface pressure co&cient using the lower order artificial dissipation on grid nacab2
5.3 Case 2: NACA 0012 129
Figure 5.24: Surface pressure coefficient ushg the lower order artificial dissipation on grid nacab3
5.4 Case 3: NACA 0012 130
5.4 Case 3: NACA 0012
The third test case ciiffers £iom the previous two test cases in that the flow field modelled
in this case is a realistic aerodynamic problem. The Reynolds number is set at a value of
2.88 million, which is consistent with levels that would be expected about actual airfoils
in flight. This case uses the NACA 0012 airfoil at an angle of attack of 6.0 degrees. In
such realistic flows, the boundary layer surroundhg the airfoiI is expected to be turbulent
and very thin relative to the previous two test cases. The initial node spacing off the wail
must be small, leading to highly stretched triangles in the boundary layers. The aspect
ratio of these triangles is on the order of 200:l at the mid-chord point. With stretching of
this magnitude, the adaptive gridding routines and the solution dependent retriangulation
will be severely tested when adaptation of the viscous regions is conducted.
1 1 Far Field 1 Airfoil Body 1 Airfoil 1 Off-wd
Table 5.20: Grid specifications for Case 3
Grid Name nacacl nacac2 nacac3 nacac4 nacac5 nacac6
The procedure for this case will be Qmilar the previous two in which a series
of grids of increasing refinement were used. Unadapted solutions are then obtained on
each grid and compared to an adapted r d t . The fkst three grids listed in the grid
specifications of Table 5.20 are adapted to yield grïds wîth a four-fold increase in the
number of nodes. Typid y+ d u e s at the first grid point fkom the sudace for the finest
grid are on the order of 1. The r d t s produced by these Bdapted grids are compared
to the values obtained fÎom grids nacac3, nacac4, and nacac5 which contain roughly the
same number of nodes as the adapted grids. Cornparison of the two sets of r d t s will
Angular Node Separation
Node Spacing Body Nodes Nose
Node Spacing
120 180 240 360 480 960
Tai1 0.005
0.0037 0.0025 0.0019 0.00125 0.000625
30.0" 15.0" 12.0" 6.0" 5.0" 2.1"
0.00015 0.0001 0.00005
0.000032 0.000015 0.000005
0.00125 0.00093 0.000625 0.00046
0.0003125 0.00015
5.4 Case 3: NACA 0012 131
be made in relation to a benchmark solution obtained on the h e s t unadapted grid (
nacac6 ). A grid independent solution is not aïailable due to the excessive computational
requirements of grids with an extremely large number of nodes.
Three parameters are used to assess any improvement in solution accuracy; the
lift coefficient, the pressure drag coefficient, and the fiction drag coefficient. The un-
adapted results shown in Table 5.21 indicate that the coarser grids tend to overestimate
the pressure drag while underestimating the frictional drag. Combining the two results
to yield a total drag coefficient wil l produce sigdicant error cancellation, creating a mis-
leadingly accurate estimate. For this reason the total drag coefficient was not used as a
indicator of improved remlution in this case.
The results presented in case 1 indicated that the greatest error reduction was
produced by an adaptation parameter formed fiom a combineci Mach number / density
edge difference with 55% of the adaptive nodes inserted in the k t adaptive pass and
45% in the second. A study using numerom possible adaptation parameters and node
allocation configurations similar to case 1 was conducted in case 3. The results of this
study in case 3 did not d8er fkom the optimal configuration learned in case 1. Therefore,
in this case only the results of the optimal configuration are presented. The error relative
to the benchmark solution produced by the unadapted grids is given in Table 5.22, while
the corresponding error for the adapted grids is given in Table 5.23. The results comparing
lift, pressure drag, and fiction drag error are presented in Figures 5.25, 5.26, and 5.27
respectively. The reduction in lift and pressure drag error is substantial. For a M d size
of approximately 14,000 nodes, the LiR coefficient benchmark was underestimated by the
unadapted grid by 6.72%, while the corresponding figure for the adapted grid was 0.04%.
In terms of pressure drag the error on the unadapted grid was 91 .?O%, with the adapted
grid yielding 50.71%. This represents an improvement in accwacy of apprcocimately 40%
in the case of pressure drag. The r d t s are nearly the same when the large 24,000 node
grid is considered. However, in each grid size considered there is no indication that the
5.4 Case 3: NACA 0012 132
adaptive gridclhg routines improve the estimate of Ection drag.
The adapted and unadapted results of the 24,000 node grid were also compared to
the r e d t s produced by a stmctured grid solver developed by the NASA Ames Research
Center called ARC2D. The ~ t ~ c t ~ r e d grid used in ARC2D contained 40,000 nodes and
had an initial off-wall spacing of 1 x IO-^. The pressure coefficient dong the airfoil suface
produced by ARC2D is compared to that predicted by the adapted grid in Figure 5.28.
The same cornparison is made in Figure 5.29 only in this case the unadapted resdts are
compared to the structurecl grid. The d a c e pressure promes of both the adapted and
unadapted grids compare well to the structured r d t s . However, in the adapted case
the suction peak value is closer to the stmctured result than the unadapted profile. The
pressure values produced by the adapted grid coincide more closely with the stmctured
result than the unadapted case over the entire airfoil. At the t r a i h g edge of the airfoil
the result is the same, the adapted grid reproduces the structurecl result more closely.
Grid Name
Table 5.21: Unadapted lift and h g results for Case 3
Figure 5.39: Mach number field for the enlarged unadapted grid, case 4
5.5 Case 4: NACA 0012 148
Figure 5.40: Presnire field for the enlmged unadapted grid, case 4
5.6 Case 5: RAE 2822 149
5.6 Case 5: RAE 2822
This test case is found in the AGARD Advisory Report no. 138, and is classifieci in that
report as case 6. It uses an RAE 2822 airfoil at a Reynolds number of 6.5 million with a
corrected fkee stream Mach number of 0.729 and corrected angle of attack of 2.70 degrees.
This case was selected for andysis since it is a commonly used test case for validation of
numerical algorithm. Experimentally obtained surface pressure profiles over the airfoi1
make this case particdarly useful in assessing the performance of the algorithm.
The format for this test case wiU be altered fiom the other cases in terms of
the node docation per adaptation pas . In the other test cases multiple passes per
adaptation have been investigated, providing an approximate four-fold increase in the
number of nodes. This test case will study the potential improvement in resolution using
a single adaptation pass with an approximate two-fold increase in the number of nodes.
The adaptation begins with the solution on a grid of 8198 nodes, and is adapted once
with only one pass to yield a grid of 17171 nodes. The Mach number field produced
by the adapted grid is shown in Figure 5.41. One prominent feature of the solution is
a small wesk shock wave located near the midpoint of the upper surface of the airfoil.
Effectively capturing the location and strength of this shock wave will be critical to
determining the proper lift coefficient of this problem. Figure 5.42 shows the adapteà
grid for this case. Near the location of the shock wave the adaptation routine has clearly
refined the region about the shock wave. This results in a general improvernent in the
prediction of the shock wave location when compared to the solution on an unadapted grid
of approximately equal node density. Figure 5.43 shows the pressure coefficient along the
&oil surface obtained from the adapted grid cornpared to r d t s from the unadapted grid
and to experimentally obtained values. The location of the shock wave is clearly evident
in the experimental r d t s by the sudden jump in pressure along the upper surface of
the aidoil. The unadapted pressure profile follows the experimental d u e s over the lower
half of the airfoil, but deviates QgniIicantly over the upper surface. The adapted resulta
5.6 Case 5: RAE 2822 150
follows the experimentai results over most of the airfoil, includhg the upper sdace. The
only significant deviation occurs nesr the shock wave where the grid does not accurately
capture the location and strength of the suction peak. The general improvement in
surface pressure values is reflected in the predicted lift coefficients. Ekperimentally the
lift coefficient was 0.743, compared to an adapted value of 0.738 and an unadapted value
of 0.650.
Generally, it can be seen that the adaptation routines with only one adaptive
pass are still capable of providing significant gains in solution accuracy. The prediction
of details such as the location of shock waves and airfoil surface pressure benefit greatly
from even lllnited adaptive rehement.
Figure 5.41: Mach number field about an RAE 2822 aidoil on adapted grid, case 5
5.6 Case 5: RAE 2822 151
Figure 5.42: Adapted grid of RAE 2822 airfoil, 17171 nodes, case 5
Figure 5.43: Compazison of surface pressure coefficient using adaptive gridding, un- adapted grids, and experimentd methods, case 5
5.7 Case 6: AGARD AR 303 A2 152
5.7 Case 6: AGAFLD AR 303 A2
The last case presents the most complex flow field encountered in this research. Instead
of using a single airfoil as in the previous test cases, this case uses a three element airfoi1
in a high-lift configuration. It is taken fkom the AGARD Advisory Report no. 303 and
designatecl as case A2. It consists of a main airfoil element with a slat element ahead of
it, and a flap element in its wake. The free stream Mach number is 0.197 with a Reynolds
number of 3.52 million at an angle of attack of 4.0 degrees. The flow field is characterized
by a number of complex flow features. Boundary layers are generated on the surfaces of
the slat and the main airfoil element which subsequently become separatecl and disturb
the 0ow patterns about elements further down stream. Strong recirculation regions form
behind the slat and under the trading edge of the main airfoil. The wakes emanating fkom
the slat and the main airfoil influence the flow field surrounding the elements downstream.
AU such features present a formidable problem for both the adaptive gridding routine and
also the Navier-Stokes solution algorithm. Accuracy is mwured by comparing the results
obtained fiom an adapted solution to that of an unadapted solution and to experimentaily
determineci values. The surface pressure coefficients over dl three elements are available
along with transverse total p r m e coefficient profiles acrm the flow at three stations
on the airfoils. The total pressure coefficient (Cp, ) is defined in
where
The three profiles of C p , are taken normal to the airfoil d 8 c e s
terms of the stagnation
(5-3)
along the lines specified
in Figure 5.44. The airfoil elements are also d&ed in relation to each other in this figure.
The test case begins with an unadapted grid containing 21,125 nodes typified by
an even node distribution about the airfoil, as seen in Figures 5.45, 5.46, and 5.47. The
adaptation is conducted with a Mach number/density formulation using 55%/45% node
5.7 Case 6: AGARD AR 303 A2 153
ailocation to yield a grid of 84,385 nodes. The Mach number field over the entire airfoi1
generated with the adapted grid is presented in Figure 5.48. The difiiculty associated with
this test case is expresseci by the complexity of the Mach number field about the airfoil.
The confluent wake and boundary layer at the trailing edge of the main airfoi1 create au
elaborate wake systern that the adaptive gridding routine must detect and r e h e if an
accurate solution is to be obtained.
The N1 adapted grid presented in Figure 5.49 shows that the adaptive routines
are able to detect such features on a large scale. The wake region generated by the
three elements has been clearly refhed along with the upper surface of the main element.
Further detaüs of the adaptation are made clear only with enlargement of the leading
and t r a ihg edge regions. Figures 5.50 and 5.51 show an enhanced view of the adapted
grid and Mach number field about the slat element. The mail wake trailing from the top
surface of the slat over the leading edge of the main element has been heavily refined. The
separated boundary layer at the cusp point on the lower edge of the slat has been refined
as it moves between the main element and the slat. The recîrculation region behind the
slat and the stagnation region on its leading edge have also been addressed. The adaptive
algorithm shows the same ability at capturing significant flow features in the flap region
as it does near the slat, as seen in Figures 5.52 and 5.51. The gap between the trailing
edge of the main aufoil element and the leading edge of the flap is the site of interactions
between several conjoining features of the flow field. The separated boundary layer fiom
the cusp point on the lower half of the main moi1 joins the wake of trailing edge of the
main elernent and the leading edge boundary layer of the flap. These features and their
confluence have all been detected and rehed by the adaptive routines. Although the
adaptive gridding routines have been effective at detecting and refining aU of the criticsl
features of this problem, the ultimate indication of success is through cornparison to the
actud fiow solution.
The next series of results compares the numerically determinecl SUTface pressure
5.7 Case 6: AGARD AR 303 A2 154
coefficient with values provided through experiment. In Figures 5.54, 5.55, and 5.56,
the d a c e pressure coefficient produced through the adapted grid is compared to values
produced by experiment and to r d t s obtained from an unadapted grid with apprax-
imately the same number of nodes as the adapted grid. The surface pressure profiles
on the main airfoi1 produced through these methods give very similar results, as shown
in Figure 5.54. However, on the upper surfsce there is a visible ciifFerence between the
unadapted results and the others. Generally, the unadapted surface pressure is slightly
greater on this surface than both the experimental and adapted d u e s . The level of
error in the experimental values is expected to be small in relation to the pressure dif-
ferences between the experiment and the unadapted values. Therefore, the improvement
in surface pressure prediction indicated on the main airfoil element through the adaptive
algorithm is expected to be reaüstic. Overail, the adapted results compare very welI with
the experimentd d u e s ail almg the main airfoil surface. This trend continues with the
surface pressures dong the SUllf'es of the 0ap shown in Figure 5.55. Both adapted and
unadapted resdts compare well with the experimental values, although in this instance
there is no clear improvement in d x e pressure prediction between the adapted and
unadapted grids. On the upper surface the pressure predicted by the adapted grid is
slightly less that the experimental d u e s , while for the unadapted grid it is slightly more.
The largest Merence in sudace pressures occurs on the slat, as seen in Figure 5.56. The
adapted grid produces values that foIIow the experimental values reasonable weU, while
the unadapted grid shows less agreement. The adapted results also produce a more ir-
regular pressure profile than on the other airfoi1 bodies. On close inspection of the grid,
the small pressure fluctuations correspond to portions of the grid with highly stretched
triangles that form irregulsr control volumes. Fortunately, these fluctuations are smaU
and WU diminish with further refhement based on the fact that the truncation error on
even the most irregular grids will decrease with grid spacing, according to Appendix B.
The next series of r d t s presents the three total pressure coefficient profiles
5.7 Case 6: AGARD AR 303 A2 155
obtained fiom the adapted and unadapted grids in cornparison to experimentai dues.
The profiles are taken dong paths emanating at right angles from the surfaces of the
airfoils. The profiles nit across the flow field through the boundary layers into regions
of inviscid flow. At the trailing edge of the main aidoil, the profile moves from the
leading edge of the flap past the traüing edge of the main airfoil into the interior of the
domain. The profile taken at the 35% chord point on the main airfoil is presented in
Figure 5.57. The adapted values compare reasonably weU to the experimentd results.
The portion through the boundary layer at the bottom of the profile is captured very
accurately. The abrupt change in dope of the profile occurs at the same point above
the airfoil d a c e in the adapted results as it does in the experimental results. The
unadapted results fair more poorly through the lower half of the profile. The abrupt
change in slope of the profile is not captured at all, reflecting a lack of resolution. The
to td pressure profile at the trailing edge of the main airfoil, shown in Figure 5.58, gives
a similar result. The adapted profile captures the experimentai results very accurately.
The region above the flap is resolved very well, capturing the shape of the profile with
precision. The value of the total pressure at the traiüng edge of the main airfoil predicted
by the adapted result compares very closely to the experimental value. Between the flap
and the main airfoil the unadapted grid a h produces a reasonable estimate of the total
pressure profile. However, above the main airfoi1 the unadapted profile maintains the
shape of the experimentd result but with somewhat lower values. The total pressure
coefficient profile above the midpoint of the flap is given in Figure 5.59. The adapted grid
produces a profde that captures the variation of the experimental values. The adapted
solution süghtly overestimates the value of the fkst peak of total pressure above the 0ap
but correctly predicts its location. It somewhat underestimates the d u e at the lowest
point in the trough in total pressure above the first peak and slightly overestimates its
location. The unadapted solution underestimates the value of both the first peak and the
subsequent trough. The lower portion of the unadapted solution compares favorably with
5.7 Case 6: AGARD AR 303 A2 156
the adapted result but degracies in the upper portion. Generally, the adapted solution
produces a closer approximation to the experimental results in both profile shape and
magnitude.
In summary, the adapted solution was more successful at reproducing the exper-
imental results. The d h c e pressures were very well predicted at all points along the
airfoils. The total pressure coacient profiles compared well with the experimental values
and only began to show some error at the mid-chord point above the Bap. For generd ap-
plication to andysis of aerodynarnic problems, it is clear that the use of adaptive gridding
can serve to enhance the resolution capabilities of the present solver for a given number
main airfoit element slat etement
Figure 5.44: The location and direction of the total pressure profiles in relation to the three element airfoi1
5.7 Case 6: AGARD AR 303 A2 157
0.7 0.8 0.9 1 1.1 1 3 1 3 1.4 WC
Figure 5.45: Initial grid about the flap, three element case 6
Figure 5.46: Initial grid about the slat, three element case 6
5.7 Case 6: AGARD AR 303 A.2 158
Figure 5.47: Initial grid of the three element airfoi1 of case 6, 21,125 nodes
5.7 Case 6: AGARD AR 303 A2 159
Figure 5.48: Mach number field over the N1 aidoil of case 6, obtained on the adapted pnd
5.7 Case 6: AGARD AR 303 A2 160
Figure 5.49: Full adapted grid of the three element airfoil of case 6, 84,385 nodes
5.7 Case 6: AGARD AR303 A2 161
Figure 5.50: Adapted grid about the slat of the three element sirfoi1 of case 6
Figure 5.51: Mach number field about the slat obtained on the adapted grid of the three elernent airfoil of case 6
5.7 Case 6: AGARD AR 303 A2 162
Figure 5.52: Adapted grid about the flap of the three element d o i l of case 6
Figure 5.53: Mach number field about the 0ap obtained on the adapted grid of the three element airfoil of case 6
5.7 Case 6: AGARD AR 303 A2 163
W C
Figure 5.54: Comparison of pressure coefficients over the d a c e of the main airfoil ob- tained with
Figure 5.55: the adapted
the adapted grid, unadapted grid, and through experiment
Comparison of pressure coefficients over the surface of the flap obtained with grid, unadapted grid, and through experiment
5.7 Case 6: AGARD AR 303 A2 164
Figure 5.56: Cornparison of pressure coefficients over the surface of the slat obtained with the adapted grid, unadapted grid, and through experiment
Figure 5.57: Cornparison of total pressure coefficient profiles 8t 35% chord on the main airfoil obtained with the adapted grid, unadapted grid, and through experiment
5.7 Case 6: AGARD AR 303 A2 165
Figure 5.58: Comparison of total pressure coacient profles at the trailing edge of the main aufoil obtained with the adapted grid, unadapted grid, and through experiment
Figure 5.59: Comparison of total pressure coefficient profiles at 50% chord on the 0ap obtained with the adapted grid, unadapteci grid, and through experiment
Chapter 6
Conclusions, Contribut ions, and Recommendat ions
6.1 Conclusions
The previous chapters have presented the details of a solution-adaptive unstructureci solver
appropriate for aerodynamic problems. The results have demonstrated that the solver and
adaptive gridding methodology are effective at producing well resolved solutions over a
range of Reynolds numbers and aerodynamic configurations. GeneraJly, the six test cases
have shown that the research objectives üsted in the introduction of the thesis have been
accomplis hed.
The fht objective of this study was to create an algorithm using unstructureci
gnds to solve the Navier-Stokes equations for both laminar and turbulent flows appro-
priate for application to aerodynamic problems. Esch of the six test cases presented the
results of an analysis performed on a specinc problem. The second test case demonstrated
that the improved higher order artificid dissipation method allows greater insensitivity to
irregulax grid geometries than more traditional methods, and produces accurate, srnooth
solutions. However, the most convincing evidence of the success of this algorithm is r e
vealed in cases 5 and 6 in which cornparisons are made directly to experimental evidence.
In these cases the surface pressures obtained through the algorithm are shown to be ex-
trernely clme to d u e s determined through experiment. The total pressure coefficient
6.1 Conclusions 167
profles shown in case 6 a h compare w d with the experimental values. Rom these
cornparisons it can be concluded that the algonthm developed c m succesduly produce
solutions to aerodynamic problems that are consistent with reality.
The second objective of this research was to develop a solution-adaptive gridding
routine applicable over a wide range of Reynolds numbers. In chapter 4 the adaptive grid-
ding methodology was developed using an adaptation parameter based on a normaked
Merence dong grid edges of the flow field variables. It was shown that solution-dependent
retriangulation is necessary to presewe the stretched nature of the grid in viscous regions
following adaptation. The first test case indicated that the adaptive gridding configura-
tion that produces the greatest error reduction consists of an adaptation parameter of
Mach number and density Merences piacing 55% of the adapted nodes in the first pass
and rest in the second pas.
The final objective of this study was to demonstrate that the solution-adaptive
gridding routine produces an increase in solution accuracy over unadapted grids with an
equivaient nurnber of nodes, in addition to demonstrating its effectiveness in applications
to realistic problems. In the nrst case it was shown that with two applications of adapta-
tion it was possible to reduce the error in the calculation of lift, pressure drag, and friction
drag coefficients by at least 50% over an unadapted grid with the same number of nodes.
In case 3 the turbulent flow produced a similsr result. In this case a single adaptation was
able to achieve approximately a 40% reduction in pressure drag coefficient error and an
even greater reduction in lift error. This case also demonstrated that the adapted &il
surf'e pressure compared very favorably to that produced by a stnictured grid solver.
Case 4 showed that the adaptive methodology was able to detect and substantially refine
the shock waves that developed in this problem. The shockwaves were sharply de- and
correctly located unlike the unadapted grid which gave poorer shock wave resolution. In
cases 5 and 6 the predicted surface pressures of the adapted grids were shown to be doser
to the experimental d u e s than the unadapted grids with the same number of nodes. In
6.2 Contributions 168
case 6 the total pressure coefficient profiles produced through adaptation were shown to
have superior resolution over profiles obtained on unadapted grids. In the last two cases
the performance of the adapted grîdding methods vindicate the algorithm as an eff'tive
analytical tool for realistic aerodynamic problerns. Generally, from the error reductions
in the Lift and drag and with the surface pressures and total pressure profiles, it can be
concluded that the adaptive methodology is s u c c d at defining regions of the grid that
Iack resolution and capable of providing a reduction in global error.
Contribut ions
The conclusions have shown that the work presented in thiç thesis has achieved the objec-
tives specified in the introduction. A number of these accomplishments represent signif-
icant contributions to the body of knowledge associated with solution-adaptive gridding
on unstructureci grids in viscous flows. A brief summary of these contributions is now
provided.
The primary contributions of this work occur in regards to the solution-adaptive
gridding strategy. A number of developments are required in the solver and in the adaptive
gridding routines in order to attain the thesis objectives. The adaptive gridding process
introduces an increased level of irregulanty into the grid as new nodes are added. The
high-aspect-ratio scaling factor used with the higher order artificial dissipation method
was created to d u c e the sensitivity of the dissipation to irregular and highly stretched
triangles. This perrnitted the algorithm to maintsin smooth solutions in the presence of
increased grid irregulanty due to adaptation. Further developments are required in post-
processing the grid afker adaptation. The retriangulation procedure is shown to generate
inappropriate @ds in the viscous regions about the aixfoil profiles following adaptation.
Stretching the grid in the direction of the Mach number gradient prior to retriangulation
d o w s the recovery of the high-aspect-ratio nature of the grïd in the viscous regions.
The most signinmt contributions of this work are seen in the applications of
6.3 Recommendations 169
the adaptive gridding routine. An investigation of its performance on both low and high
Reynolds number flows using numerous possible adaptation parameters was conducted.
Although similar studies on inviscid flows using undivided ciifferences indicated that an
adaptation parameter based on density provideci the greatest e m r reduction, it was not
clear if this also applied to viscous flow problems. This study demonstrated that an adap
tation parameter formed fiom undivided ciifferences of Mach number and density achieves
optimal performance in viscous flows. Within the constraint of a four-fold increase in the
number of nodes with each adaptation, it was demonstrated that adaptation conducted
in two passes with 55% of the nodes introduced in the h t pass and 45% in the second
achieved the greatest error reduction. It is these two developments that form the most
signiücant contributions of this work.
6.3 Recommendat ions
The numerical algorithm presented in this thesis was developed to obtain well resolved s e
lutions over a range of aerodynamic flight problems. The test cases demonstrated that the
adaptive methods used, in particular the edge difference adaptation parameter combined
with the solution dependent retriangulation, achieved these goals. Although the creation
of an adaptive gridding algorithm for the solution of high-Reynolds-number aerodynamic
problems using unstmctured grids is a significant accomplishment, it remah as ody one
step in the development of a u n i v e d y functional design tool. Ultimately, the lessons
leatned here wilI be used to guide the creation of a three-dimensional adaptive unstmc-
tured algorithm for use in the aerospace industry. This section of the thesis is intended
to serve as a suggestion for further development in the pursuit of such an algorithm.
The ~ r u c t u r e d grids which form the foundation of this research work are d e
fineci using a memory intensive format. Each grid is specified by several data arrays; the
x and y cartesian cooràinates of each node, a list of neighbour nodes surrounding a given
node, a list of the triangles that form a control d u m e œntered about a node, a list of
nodes that form each triangle, and a pointer array to direct the partitioning of neighbour
node and triangle control volume lists. Through experience it was found that for grids
under 50,000 nodes in size this format presents no diffidty in terms of cornputer rnemory
for either storage of the grid or for use in the algorithm. However, above 50,000 nodes
this format became increasingly cumbersome. One format that is often used for defining
an unstructureci grid is the edge based configuration. In this format the grid is defined
by the edges that connect the nodes. Therefore, to d e h e a grid the only information
r e q M is a list of the two nodes that defme each edge and the x and y coordinates of
each node. This format simplifies the storage requirements and provides an opportunity
for more efficient flux calculations. It is recommended that any future development on
two-dimensional unstmctured grids take advantage of this format.
On several adapted solutions on high-Reynolds-number flows it was observed that
small pressure fluctuations were present on portions of the airfoil surfaces. The regions
where these oscillations occur correspond to portions of the gxid that contain irregular
control volumes. Although these fluctuations were too small to alter the generd solu-
tion, they are nevertheless physically unrealistic. The condition diminishes considerably
depending on the local level of grid refinement or on the magnitude of the artiiicial dis-
sipation operator. The solution to this diffidty is either a repeated use of the adaptive
gridding routine to the point where the local refinement is such that the problem is al-
leviated, or through improvements in the spatial resolution of the soiver. Additional
rehements entail added computational expense, hindering the algorithm in achieving an
eEcient solution process. Therefore, to preserve the gains brought about in computational
efficiency through the adaptive gridding process, the difiEiculties in the solution algorithm
must be addressed. The behaviour of the pressure fluctuations with respect to artificial
dissipation indicates that although the higher order artificid dissipation method makes
some progress towards grid insensitivity, there remains room for improvement. A more
sophisticated Laplacian operator approximation through a least-squares approach may be
effective in improving the performance of the dissipation scheme. Using such an opera-
tor over the entire grid will be computationally expensive. mus, using the least-squares
approximation only in the viscous regions where they are needed may be more efficient.
One other means of addressing this difEculty may also be through an Mprovement in
the flux approximations through the control volume surfaces. At present, the integration
about each control volume boundary assumes a linear flux profile on each bounding edge.
Using a higher order method to reconstruct the flux profile may address the loss of ac-
curaey in the presence of irrepuiar grids as shown in Appendix B, and may alleviate the
surface pressure fluctuations to some extent. A review of several reconstruction methods
including quadratic algorithms has been documented by Barth [35].
The solution-adapt ive gridding methodology presented in this thesis has been
shown to be effective at reducing the global error over a range of aerodynarnic problems.
However, in certain areas such as the prediction of d a c e skin friction in high-Reynolds-
number flows, the algorithm remains ineffective, as demonstrated in case 3. A number of
developments caa be introduced to the adaptive algorithm in order to address such con-
c e m and possibly gain further error reduction. The normalized undivided edge Merences
that form the adaptation parameter give only an indirect estirnate of the magnitude of
the local error. A more aggressive approach through a direct truncation enor estimate
will enhance the ability of an adaptive algorithm in identifying regions that la& resolu-
tion. An adaptive gridding scheme that uses such an e m r estimate will require a number
of fatures beyond those of the present algorithm. In Chapter 4 it was indicated that
such an approach, within the context of a purely node-additive adaptation, &ers kom
exaggerated error estimates due to fluctuations in the solution. This causes excessive grid
rehement in regions where the solution variability does not warrant such heavy adap-
tation. To overcome this difficul~ a grid coarsening algorithm must be adopted, which
detects over-refined regions of the grid and removes S U ~ ~ U O I I S nodes. A strategy such
as this will require an alternative approach to adaptive gridding than the method used in
6.3 Recommendations 172
this thesis. At present, the adaptive gridding routine generates a four-fold increase in the
number of grid nodes with each adaptation. This process must be abandoned in favour of
repeated applications of the refhement/coarsE?ning method, where the number of nodes
added or removed in one application is governeci by the error estimate only and not by
limits imposed by the multigrid routine. AR error cut-off point must then be imposed
on the tmcat ion error estimate, below which a grid edge will not trigger the adaptation
routine. The cut-off point will need to be s p d e d by the algorithm user or through limits
determineci heuristically.
Another adaptive methodology that can be directly applied to the algorithm in
this work is the r-adaptive or node movement adaptation approach. This method differs
kom the refinement techniques in that no additional nodes are added. Node movement
methods h p l y re-orient the d i n g nodes such that some enor measure is minimized.
The error detection methods that apply to node addition adaptation can also be used for
the node movement approach. One common technique for implementing node movement
is with the spring equüibrium anaiogy approach where the 'spring constants' of the edges
c o ~ e c t e d to a node are proportional to the local error measure. siionilar to the node
addition methods, the node movement technique can be applied repeatedly with the
unstmctured solver used between each application. This method can be applied dVectly to
the present solver or can be used in conjunction with the rehement/coarsening technique
described previously. Recently, Habashi et al. [53] have had success with this method on
subsonic and supersonic laminar airfoi1 problems.
References
[l] Huebner, K.H., Thornton, E.A., Byrom, T.G., The FiBite Element Method for En-
ginews 9rnl ed., John Wiley & Sons, Inc., New York, 1995, pp. 812.
[Z] Greenstadt , J., "On the Reduction of Continuous Problems to Discret e Formn , IBM
Jour. R a . Dev. Vol. 3, 1959, pp. 355363.
[3] Lewis, P.E., Ward, J.P., The Finite Element Method, Penciples and Applications,
Addison-Wesley Pub. Co., New York, 1991, pp. 1-3.
[4] Hess, J.L., Smith, A.M.O., "Calculation of Non-Lifting Potential Flow about h b i -
trary Three-Dimensiond Bodies" , Douglas Aircraft Report, ES 40622, 1962.
[5] Rubbert , P.E., Saaris, G .R , "A General Three-Dimensional Potential Flow Method
Applied to V/STOL Aerodyn81L1icsn, SAE paper 680304, 1968.