IMPIEGO DI IMMAGINI SATELLITARI PER IL MONITORAGGIO DELLA DINAMICA COSTIERA Monica Deidda* * Università degli Studi di Cagliari – Dipartimento di Ingegneria Strutturale – Sezione di Topografia [email protected]KEY WORDS: Batimetria, Bilko, Modello di Jupp, IDL, Immagini satellitari, Telerilevamento ABSTRACT: Il monitoraggio degli ambienti marino-costieri necessita del controllo delle variazioni della linea di costa nonchè dei fondali marini. Gli studi volti a definire la posizione della prima risultano ormai innumerevoli, per contro meno numerosi risultano quelli legati a valutazioni batimetriche. In considerazione di ciò, il presente studio utilizza il Telerilevamento quale tecnica possibile per il monitoraggio della dinamica costiera di un sito locale: il Poetto a Cagliari. Il modello per l’estrazione dell’informazione batimetrica scelto è quello di Jupp o delle DOP (Depth Of Penetration) Zone. Ulteriore obiettivo posto dalla ricerca è quello di valutare i risultati conseguibili dall’impiego di immagini a risoluzione geometrica differente: Landsat TM5 (media risoluzione) e Ikonos (alta risoluzione). La prima georeferenziata con funzioni polinomiali, la seconda sottoposta ad una fase di preprocessamento più complessa consistente nell’applicazione di correzioni radiometriche del Sun glint e della colonna d’acqua. L’immagine Ikonos è stata infine georeferenziata con il metodo RFM (Rational Function Model) solo a seguito di una classificazione operata nell’intento di definire le aree di fondale omogeneo. La sperimentazione, condotta dapprima con l’ausilio del software dell’UNESCO “Bilko”, è stata reiterata implementando il modello di Jupp nel software ENVI. Tale operazione è stata possibile scrivendo l’algoritmo che regge il modello nel linguaggio di programmazione IDL (Interactive Data Language). La versione scritta per il sensore Landsat TM5 è stata adattata al caso Ikonos per tenere conto della maggiore risoluzione di quest’ultima e consentire il calcolo per ogni area di fondale omogeneo derivante dalla classificazione. 1. INTRODUZIONE Gli ambienti marino-costieri, beni inestimabili del patrimonio naturalistico di una nazione, costituiscono fonte di reddito sia per coloro i quali ne sfruttano i prodotti derivanti da attività legate alla pesca sia per le comunità che li abitano le quali, godono del privilegio di disporre di risorse naturalistiche talvolta di particolare bellezza. E’ innegabile però che le aree litoranee siano degli ambienti in continua evoluzione. Tale evoluzione spesso, piuttosto che dovuta alla naturale e continua rigenerazione degli arenili è sempre più spesso condizionata dagli interventi antropici. Questa è la condizione di parecchie delle zone litoranee della regione Sardegna. A seguito di tali considerazioni nasce l’esigenza di realizzare campagne di monitoraggio delle dinamiche costiere sia in relazione alle variazione della linea di riva sia del fondale marino. Sono oramai molteplici gli studi sui fenomeni di erosione e/o accrescimento degli arenili condotti in relazione agli spostamenti della linea di costa. Il rilievo di quest’ultima è infatti realizzabile sia sfruttando singolarmente tecniche quali GPS, Fotogrammetria e Telerilevamento, o ricorrendo ad analisi congiunte di queste. Per quanto concerne invece le variazioni del fondale si osserva che le tecniche sfruttabili in tal senso sono pochissime. Il tentativo è quindi quello di accrescere il ventaglio di possibilità valutando le potenzialità offerte da altre tecniche magari nate per indagini di altro tipo; è il caso del Telerilevamento. Il telerilevamento con sensori passivi presenta però svantaggi legati all’attraversamento, da parte dell’energia luminosa, dello strato atmosferico e di quello costituito dalla colonna d’acqua. Lavorando in acqua è necessario considerare che nel suo percorso ideale il raggio luminoso che parte dalla sorgente (il sole) attraversa inevitabilmente due strati: quello atmosferico e quello della colonna d’acqua. Allo scopo di eliminare le “alterazioni” dovute a quest’ultimo passaggio, si effettuano due correzioni: Sunglint e colonna d’acqua. Con la prima si corregge l’eventuale abbagliamento che si realizza a livello della superficie quando il raggio luminoso incide su questa. Con la seconda si elimina la componente dell’informazione legata allo strato d’acqua rendendola dipendente solo dal tipo di fondale. Le suddette operazioni definiscono la fase detta di pre processamento dell’immagine. Per ragioni di sintesi e nel preciso intento di dare maggiore risalto alla fase di sperimentazione si sono volutamente tralasciati i concetti teorici legati a tale fase (ndr si rimanda al testo integrale della tesi per eventuali approfondimenti). La presente ricerca utilizza il telerilevamento quale tecnica per il rilievo delle profondità di un sito locale: il Poetto a Cagliari. In particolare gli obiettivi che questa si pone sono: 1. valutare l’applicabilità del modello di estrazione batimetrica noto come modello di Jupp o delle DOP Zone; 2. implementare tale modello in un software per il trattamento di dati telerilevati; 3. valutare l’implementazione nel caso di sensori a risoluzione spaziale differente e precisamente, un sensore a media risoluzione (Landsat TM5) e uno ad alta risoluzione (Ikonos). La diversa risoluzione spaziale ha suggerito per le due immagini fasi di preprocessamento differenti. L’immagine Landsat è stata semplicemente georiferita utilizzando le equazioni polinomiali, l’immagine ikonos ha subito correzioni atmosferiche, del sunglint, della colonna d’acqua nonché operazioni di classificazione volte a definire aree di fondale omogeneo. E’ stata quindi georiferita con algoritmo RFM (Rational Function Model) con l’utilizzo di 20 coefficienti.
Transcript
IMPIEGO DI IMMAGINI SATELLITARI PER IL MONITORAGGIO DELLA DINAMICA COSTIERA
Monica Deidda*
* Università degli Studi di Cagliari – Dipartimento di Ingegneria Strutturale – Sezione di Topografia
KEY WORDS: Batimetria, Bilko, Modello di Jupp, IDL, Immagini satellitari, Telerilevamento ABSTRACT: Il monitoraggio degli ambienti marino-costieri necessita del controllo delle variazioni della linea di costa nonchè dei fondali marini. Gli studi volti a definire la posizione della prima risultano ormai innumerevoli, per contro meno numerosi risultano quelli legati a valutazioni batimetriche. In considerazione di ciò, il presente studio utilizza il Telerilevamento quale tecnica possibile per il monitoraggio della dinamica costiera di un sito locale: il Poetto a Cagliari. Il modello per l’estrazione dell’informazione batimetrica scelto è quello di Jupp o delle DOP (Depth Of Penetration) Zone. Ulteriore obiettivo posto dalla ricerca è quello di valutare i risultati conseguibili dall’impiego di immagini a risoluzione geometrica differente: Landsat TM5 (media risoluzione) e Ikonos (alta risoluzione). La prima georeferenziata con funzioni polinomiali, la seconda sottoposta ad una fase di preprocessamento più complessa consistente nell’applicazione di correzioni radiometriche del Sun glint e della colonna d’acqua. L’immagine Ikonos è stata infine georeferenziata con il metodo RFM (Rational Function Model) solo a seguito di una classificazione operata nell’intento di definire le aree di fondale omogeneo. La sperimentazione, condotta dapprima con l’ausilio del software dell’UNESCO “Bilko”, è stata reiterata implementando il modello di Jupp nel software ENVI. Tale operazione è stata possibile scrivendo l’algoritmo che regge il modello nel linguaggio di programmazione IDL (Interactive Data Language). La versione scritta per il sensore Landsat TM5 è stata adattata al caso Ikonos per tenere conto della maggiore risoluzione di quest’ultima e consentire il calcolo per ogni area di fondale omogeneo derivante dalla classificazione.
1. INTRODUZIONE
Gli ambienti marino-costieri, beni inestimabili del patrimonio naturalistico di una nazione, costituiscono fonte di reddito sia per coloro i quali ne sfruttano i prodotti derivanti da attività legate alla pesca sia per le comunità che li abitano le quali, godono del privilegio di disporre di risorse naturalistiche talvolta di particolare bellezza. E’ innegabile però che le aree litoranee siano degli ambienti in continua evoluzione. Tale evoluzione spesso, piuttosto che dovuta alla naturale e continua rigenerazione degli arenili è sempre più spesso condizionata dagli interventi antropici. Questa è la condizione di parecchie delle zone litoranee della regione Sardegna. A seguito di tali considerazioni nasce l’esigenza di realizzare campagne di monitoraggio delle dinamiche costiere sia in relazione alle variazione della linea di riva sia del fondale marino. Sono oramai molteplici gli studi sui fenomeni di erosione e/o accrescimento degli arenili condotti in relazione agli spostamenti della linea di costa. Il rilievo di quest’ultima è infatti realizzabile sia sfruttando singolarmente tecniche quali GPS, Fotogrammetria e Telerilevamento, o ricorrendo ad analisi congiunte di queste. Per quanto concerne invece le variazioni del fondale si osserva che le tecniche sfruttabili in tal senso sono pochissime. Il tentativo è quindi quello di accrescere il ventaglio di possibilità valutando le potenzialità offerte da altre tecniche magari nate per indagini di altro tipo; è il caso del Telerilevamento. Il telerilevamento con sensori passivi presenta però svantaggi legati all’attraversamento, da parte dell’energia luminosa, dello strato atmosferico e di quello costituito dalla colonna d’acqua. Lavorando in acqua è necessario considerare che nel suo percorso ideale il raggio luminoso che parte dalla sorgente (il sole) attraversa inevitabilmente due strati: quello atmosferico e
quello della colonna d’acqua. Allo scopo di eliminare le “alterazioni” dovute a quest’ultimo passaggio, si effettuano due correzioni: Sunglint e colonna d’acqua. Con la prima si corregge l’eventuale abbagliamento che si realizza a livello della superficie quando il raggio luminoso incide su questa. Con la seconda si elimina la componente dell’informazione legata allo strato d’acqua rendendola dipendente solo dal tipo di fondale. Le suddette operazioni definiscono la fase detta di pre processamento dell’immagine. Per ragioni di sintesi e nel preciso intento di dare maggiore risalto alla fase di sperimentazione si sono volutamente tralasciati i concetti teorici legati a tale fase (ndr si rimanda al testo integrale della tesi per eventuali approfondimenti). La presente ricerca utilizza il telerilevamento quale tecnica per il rilievo delle profondità di un sito locale: il Poetto a Cagliari. In particolare gli obiettivi che questa si pone sono: 1. valutare l’applicabilità del modello di estrazione
batimetrica noto come modello di Jupp o delle DOP Zone;
2. implementare tale modello in un software per il trattamento di dati telerilevati;
3. valutare l’implementazione nel caso di sensori a risoluzione spaziale differente e precisamente, un sensore a media risoluzione (Landsat TM5) e uno ad alta risoluzione (Ikonos).
La diversa risoluzione spaziale ha suggerito per le due immagini fasi di preprocessamento differenti. L’immagine Landsat è stata semplicemente georiferita utilizzando le equazioni polinomiali, l’immagine ikonos ha subito correzioni atmosferiche, del sunglint, della colonna d’acqua nonché operazioni di classificazione volte a definire aree di fondale omogeneo. E’ stata quindi georiferita con algoritmo RFM (Rational Function Model) con l’utilizzo di 20 coefficienti.
2. METODI DI ESTRAZIONE DELL’INFORMAZIONE BATIMETRICA
Il principio che sta alla base dell’uso del telerilevamento per la determinazione della batimetria da immagini satellitari è quello per il quale le differenti lunghezze della luce penetrano l’acqua a profondità differenti. Quando la luce passa attraverso l’acqua attenua in conseguenza all’interazione con la colonna d’acqua; l’intensità della luce Id, rimanente dopo l’attraversamento della lunghezza p, è data da:
pkeII −=
dkII ede 2)(log)(log 0 −=
0d (1)
con I0 intensità della luce incidente e k coefficiente di attenuazione dipendente dalla lunghezza d’onda della radiazione incidente. Se si assume che il percorso della luce dalla superficie al fondale e ritorno sia verticale, allora la distanza p può essere sostituita con il termine 2d, essendo d la profondità dell’acqua. Linearizzando l’espressione precedente si avrà:
(2)
L’energia elettromagnetica della parte dello spettro del visibile con lunghezza d’onda maggiore (rosso) ha un coefficiente di attenuazione più grande di quella con lunghezza d’onda minore (blu). La profondità di penetrazione è inoltre dipendente dalla torbidità dell’acqua; infatti sedimenti sospesi, fitoplancton e composti organici disciolti condizionano la capacità di penetrazione in quanto producono sulla luce fenomeni di assorbimento e diffusione aumentando nel contempo l’attenuazione e limitando così il range sul quale il dato ottico può essere utilizzato per valutare la profondità. I modelli che applicano i concetti fin qui esposti e che consentono l’estrazione dell’informazione batimetrica da immagini satellitari sono sostanzialmente tre: metodo di Benny e Dawson, metodo di Lyzenga e modello di Jupp noto anche come delle “DOP ZONE” (Depth Of Penetration Zone). Il metodo di Benny e Daswon introduce rispetto al percorso ideale l’unica correzione, peraltro in soli termini trigonometrici, relativa alla mancata verticalità del sole al momento dell’acquisizione dell’immagine. Il metodo di Lyzenga, come gli altri, ipotizza che l’attenuazione della luce sia una funzione esponenziale della profondità e che la qualità dell’acqua non vari all’interno dell’immagine, cosicché il rapporto tra i coefficienti di attenuazione (parametro che misura la decadenza dell’energia luminosa in acqua) per una coppia di bande i e j, ki/Kj, è costante nell’immagine. La profondità relativa può essere dedotta quindi dalla posizione del pixel lungo la linea di pendenza ki/Kj, in considerazione del fatto che questa varia lungo la linea, in modo tale che i pixel meno profondi (più chiari) hanno i valori più alti, mentre i pixel più profondi (più scuri) hanno i valori più bassi. L’eccesso di semplificazioni del primo metodo e le limitazioni legate alla contemporanea presenza di due bande del secondo hanno fatto ricadere la scelta del modello da utilizzare nella presente sperimentazione sul terzo metodo. Questo, ritenuto più completo e maggiormente adatto alla determinazione delle profondità in acque come quelle del litorale del Poetto (Cagliari), viene più compiutamente descritto nel seguito.
2.1 Modello di Jupp
Per la valutazione della batimetria secondo il modello modificato da Jupp nel 1988 è necessario che siano rispettate le seguenti tre ipotesi:
1. l’attenuazione della luce è una funzione esponenziale della profondità;
2. la qualità dell’acqua (e quindi il coefficiente di attenuazione k) non varia all’interno dell’immagine;
3. l’albedo del substrato è pressoché costante. Se all’applicazione del modello si fanno precedere operazioni di classificazione è possibile eseguire il processo separatamente per ogni habitat, rendendo in tal modo trascurabile la terza condizione. L’applicazione del modello di Jupp può essere condotta in due fasi: 1. Determinazione delle DOP zone; 2. Interpolazione delle profondità all’interno di ciascuna
DOP. 2.1.1 Depth Of Penetration Zone: le DOP zone sono definite dalla massima profondità di penetrazione delle lunghezze d’onda via via più corte. Le profondità maggiori risulteranno più luminose solo nella banda del blu proprio perché le lunghezze d’onda più corte penetrano maggiormente la colonna d’acqua, riuscendo a far pervenire il segnale luminoso al sensore. L’attenuazione della luce attraverso la colonna d’acqua è stata modellata da Jerlov (1976) e successivamente ricalcolata da Jupp (1988). Le massime profondità di penetrazione per le quattro bande del sensore Landsat TM5 sono riportate nella tabella di seguito:
Banda Profondità di penetrazione (zi) 1 25 m 2 15 m 3 5 m 4 1 m
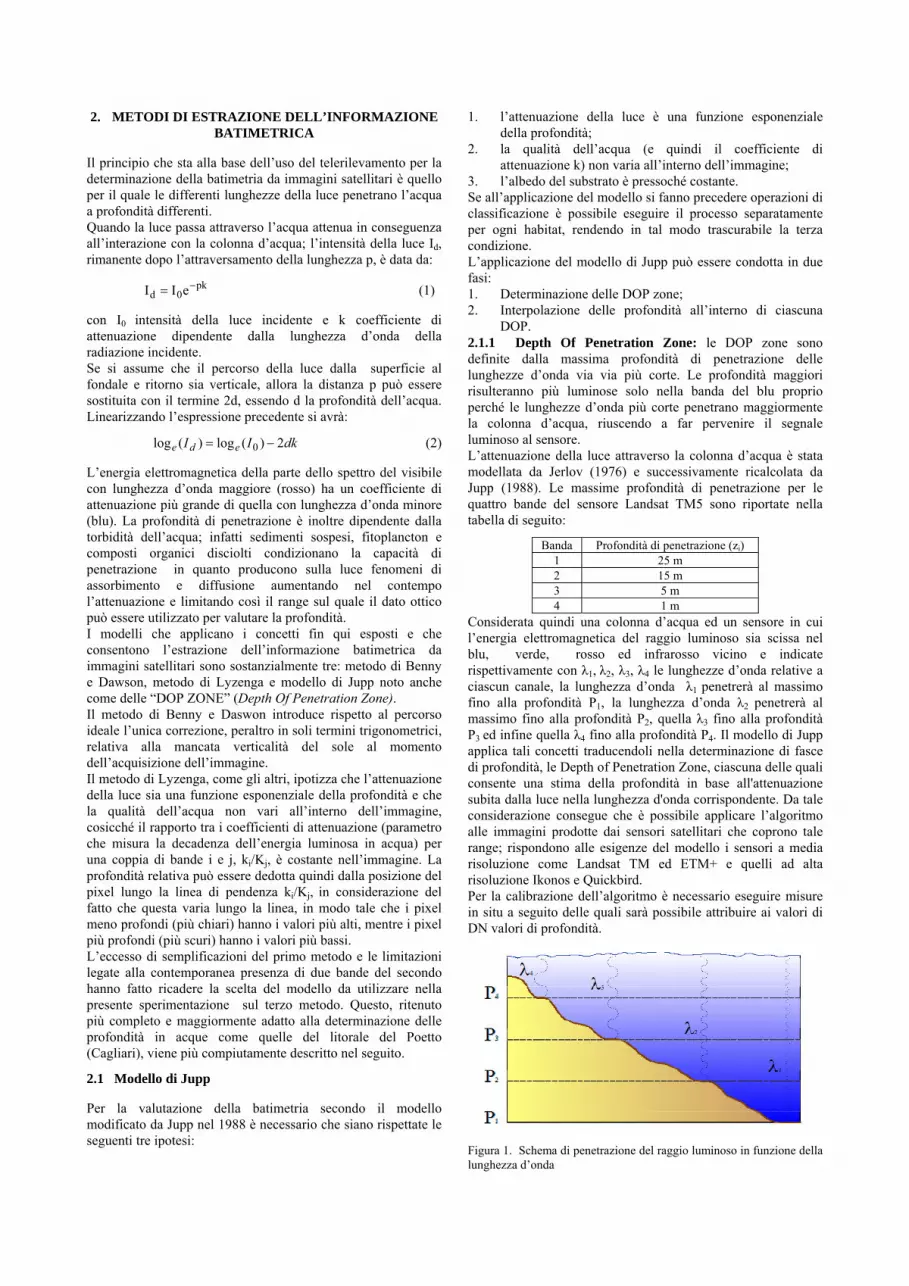
Considerata quindi una colonna d’acqua ed un sensore in cui l’energia elettromagnetica del raggio luminoso sia scissa nel blu, verde, rosso ed infrarosso vicino e indicate rispettivamente con λ1, λ2, λ3, λ4 le lunghezze d’onda relative a ciascun canale, la lunghezza d’onda λ1 penetrerà al massimo fino alla profondità P1, la lunghezza d’onda λ2 penetrerà al massimo fino alla profondità P2, quella λ3 fino alla profondità P3 ed infine quella λ4 fino alla profondità P4. Il modello di Jupp applica tali concetti traducendoli nella determinazione di fasce di profondità, le Depth of Penetration Zone, ciascuna delle quali consente una stima della profondità in base all'attenuazione subita dalla luce nella lunghezza d'onda corrispondente. Da tale considerazione consegue che è possibile applicare l’algoritmo alle immagini prodotte dai sensori satellitari che coprono tale range; rispondono alle esigenze del modello i sensori a media risoluzione come Landsat TM ed ETM+ e quelli ad alta risoluzione Ikonos e Quickbird. Per la calibrazione dell’algoritmo è necessario eseguire misure in situ a seguito delle quali sarà possibile attribuire ai valori di DN valori di profondità.
Figura 1. Schema di penetrazione del raggio luminoso in funzione della lunghezza d’onda
2.1.2 Interpolazione delle DOP Zone: Con il calcolo delle DOP zone non si attribuisce a ciascun pixel un valore univoco di profondità ma gli si assegna il range di profondità entro cui applicare il modello di attenuazione. Per la definizione delle Dop zone è necessario eseguire una serie di operazioni da replicare per ciascuno dei tipi di fondale. In primo luogo si seleziona una regione in acque profonde, rappresentativa delle proprietà ottiche del mezzo nell’area di studio, dalla quale si deducono i valori di DN corrispondenti a profondità superiori a quelle percepibili dalle diverse bande del sensore. Si stabiliscono quindi per ogni banda, i valori massimo, medio e minimo (Lλideepmin, Lλideepmean, Lλideepmax) dei pixel di quest’area campione. Si ottengono in questo modo i valori di DN che corrispondono alla risposta sul sensore del pelo libero dell'acqua (dark pixel). Successivamente si associa ad ogni punto del rilievo, anche in questo caso banda per banda, il valore del Digital Number relativo al pixel che lo rappresenta nell’immagine. La corretta attribuzione dei valori di DN ai punti del rilievo è resa possibile eseguendo preventivamente sull’immagine una operazione di georeferenziazione. A partire dalla banda 1, relativa al canale del blu e a cui corrisponde la maggior penetrazione, tra i punti del rilievo ordinati per profondità decrescenti, devono essere estratti quelli a cui corrisponde un valore di DN pari a Lλideepmax stabilito per l'area di calibrazione dei valori di DN individuata in acque profonde. La media delle profondità di questi punti costituisce la soglia relativa alla massima profondità raggiungibile dalla banda corrispondente. Per migliorare questa stima devono essere considerati anche tutti i valori di profondità superiori a quello di soglia ma che hanno dei valori di DN maggiori di Lλideepmax e quelli con profondità inferiori a quella di soglia ma con valori di DN uguali o inferiori a Lλideepmax. I limiti di profondità relativi alle altre bande si otterranno ripetendo il procedimento per ciascuna di esse. Dalla combinazione dei valori di DN massimo dell’area di calibrazione e di soglia di profondità appena definita, è possibile stabilire le regole mediante le quali i pixel dell’immagine saranno attribuiti alle diverse DOP zone. In particolare le DOP zone saranno tracciate secondo un criterio di mutua esclusione per cui penetra il blu ma non il verde, penetra il verde ma non il rosso, penetra il rosso ma non l’infrarosso, penetra il solo infrarosso. I pixel che presenteranno valori di DN minori dei massimi dell’area di calibrazione (banda per banda) si troveranno ad una profondità superiore a quella di maggiore penetrazione. Infine, ai pixel ricadenti entro ciascuna DOP zone sarà attribuito un valore pari a uno, mentre sarà attribuito un valore pari a zero a quelli ricadenti fuori dalla DOP. Tale operazione produrrà quattro immagini, denominate DOP mask, ossia tante immagini quante sono le bande coinvolte nel modello. Ciascuna DOP mask deve essere moltiplicata per la banda relativa per riottenere i valori di DN. Indicando con Lλi il valore di DN dei pixel in banda λi, il modello di Jupp pone:
Xλi max = (3) )ln( max deepmeanii LL λλ −
Xλi min = (4) )ln( LL −min ideepmeani λλ
Kλi = )z2(z
Xλiminλimax −X**
j 1j+−
*jλiλimin z2KX +
)
(coefficiente di attenuazione) (5)
Aλi = (6)
Xλi = (7) ln( ideepmeani LL λλ −
essendo Lλimin, Lλimax valori di DN minimo e massimo ottenuti dalla lettura dell’istogramma di ogni immagine prodotto e z*j la profondità massima di penetrazione relativa a ciascuna banda. I valori di profondità zλi di ciascun pixel in ogni DOP si ottengono dalla relazione:
i
iiK
XA
λ
λλ2
)( −zλi = (8)
L’applicazione della equazione (8) produrrà quattro immagini rappresentative delle profondità interpolate in ciascuna DOP dalle quali sarà possibile leggere l’informazione batimetrica; la somma di queste determinerà l’immagine finale.
3. IL PROGETTO BILKO
La complessità delle dinamiche che si realizzano in ambienti marino – costieri rende particolarmente difficoltosa l’analisi dei dati necessitando di strumenti costosi e risorse umane particolarmente esperte. Nel preciso intento di far si che operare “in acqua” non fosse più per pochi, nel 1987 nacque il progetto Bilko dell’Unesco. Il successo del progetto è sostanzialmente dovuto ai quattro criteri basati su idee valide ancora oggi: 1. Il software Bilko è stato progettato per funzionare su
piattaforme informatiche a basso costo; 2. Il software è stato concepito con un pacchetto di lezioni a
corredo. Il modello implementato dal software è quello di Jupp;
3. il software e le lezioni a corredo sono gratuiti.
E’ importante sottolineare che Bilko non è un software “autonomo”. Benché infatti possieda un proprio linguaggio con il quale costruire gli script per le elaborazioni (documenti denominati FORMULAS con estensione .frm che di seguito chiameremo Formule), necessita anche di un ambiente di calcolo esterno (per es. Excel) con il quale eseguire operazioni su insiemi di valori di DN anziché sul singolo pixel. Per la verifica della corretta implementazione del modello di Jupp sono stati utilizzati i dati del progetto Bilko relativi alla South Caicos, una delle più piccole isole dell’arcipelago Turks and Caicos situato a sud delle Bahamas. A seguito della perfetta coincidenza dei risultati con quelli già ottenuti dal progetto, si è potuta constatare la corretta implementazione del metodo.
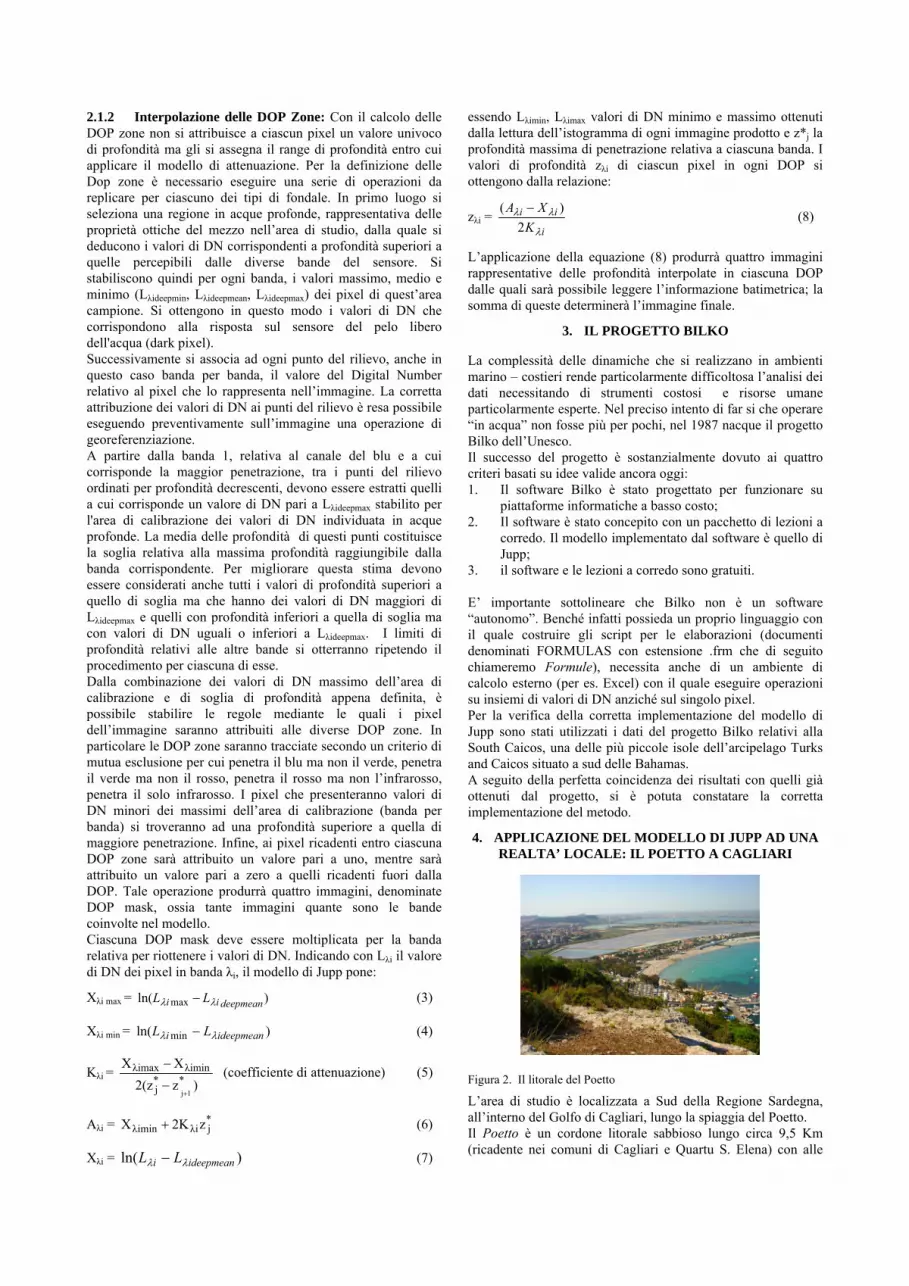
4. APPLICAZIONE DEL MODELLO DI JUPP AD UNA REALTA’ LOCALE: IL POETTO A CAGLIARI
Figura 2. Il litorale del Poetto
L’area di studio è localizzata a Sud della Regione Sardegna, all’interno del Golfo di Cagliari, lungo la spiaggia del Poetto. Il Poetto è un cordone litorale sabbioso lungo circa 9,5 Km (ricadente nei comuni di Cagliari e Quartu S. Elena) con alle
spalle il sistema delle zone umide costituito dagli stagni di Molentargius e Quartu S. Elena. La sezione di Topografia dell’Università di Cagliari studia da anni le variazioni della linea di costa del litorale del Poetto registrando in particolare il pesante arretramento che questa ha subito nel tratto Cagliaritano. Il fenomeno erosivo è divenuto negli anni sempre più grave tanto che nel 2002 è stato eseguito sul litorale un intervento di ripascimento. Con tale intervento sono stati riversati sull’arenile 36000 metri cubi di sabbia prelevati a largo del Poetto. L’intervento di ripascimento ha interessato il tratto di litorale compreso tra Marina Piccola e l’idrovora delle Saline di Stato. Gli studi finora fatti non hanno coinvolto analisi relative alle variazioni morfologiche del fondale marino antistante la linea di costa; questi consentirebbero di analizzare e prevedere il fenomeno in maniera più corretta. La scelta di lavorare ad un modello di estrazione batimetrica è stata motivata anche da questo aspetto.
4.1 Calibrazione del modello
Per la determinazione dei valori batimetrici di ogni pixel dell’immagine, l’algoritmo necessita di punti la cui profondità sia nota; si dice che l’algoritmo deve essere “calibrato”. Pertanto per calibrare il modello è necessario indicare, per una serie di punti, il valore della distanza tra essi e la superficie del pelo libero in quell’istante. Le profondità utili ad addestrare il modello sono state ottenute da rilievi batimetrici d’archivio della sezione di Topografia effettuati precedentemente al ripascimento I rilievi furono eseguiti navigando con un piccolo natante sul quale era posizionato un ricevitore GPS geodetico Javad-Topcon GPS+GLONASS e antenna LegAnt. Il ricevitore era collegato ad un notebook, connesso ad Internet attraverso un modem GSM-GPRS. Come strumento di analisi e di visualizzazione dei dati GPS veniva utilizzato il software della ESRI ArcTracking. L’antenna GPS infine, era fissata all’imbarcazione per mezzo di un’asta. Le coordinate plano-altimetriche del punto alla base dell’asta venivano determinate attraverso rilievi cinematici di fase utilizzando come stazione di riferimento quella EPN CAGZ facente parte della rete IGM95 e distante circa 13 km. Le quote dei punti sul fondo del mare erano ottenute misurando con un cordino la distanza tra la base dell’asta che sosteneva l’antenna GPS ed il fondo. In questo modo la quota dei punti del fondale era data direttamente nel sistema di riferimento WGS84. (v. schema riportato in figura 4). Il passaggio alle quote geoidiche si ottenne sottraendo l’ondulazione rispetto all’ellissoide WGS84 nell’area di Cagliari. Per ottenere la potenza dello strato d’acqua al momento del passaggio del satellite è però necessario correggere il valore di quota per la variazione di marea.
Altezza dell’antenna
Misurata effettuata con il cordino
Antenna GPS Livello di riferimento per il cordino
Figura 3. Disposizione della strumentazione a bordo dell’imbarcazione
Il mareografo fornisce variazioni riferite allo zero strumentale. Per ottenere lo spessore della colonna d’acqua richiesto dal modello è sufficiente sommare alla quota geoidica precedentemente calcolata le variazioni di marea, in quanto nel
caso di Cagliari lo zero idrometrico coincide con quello del livello medio mare.
Sfortunatamente non è stato possibile correggere la marea in coincidenza del passaggio del satellite in quanto il mareografo di Cagliari nel 1997, anno di acquisizione dell’immagne Landasat, non era in esercizio. [Idromare, 2007]. Tenuto presente che le variazioni di marea riscontrabili nel golfo di Cagliari sono dell’ordine dei 20-30 cm, considerato che l’area coperta da un pixel dell’immagine Landsat è di 30 metri, si è ritenuto ancora accettabile il valore di quota dato che in un’area così vasta le variazioni di quota sono comunque dello stesso ordine. Benché i valori di quota del rilievo non risultino riferiti al livello corretto richiesto dall’algoritmo, si è scelto di utilizzarli comunque nell’intento di valutare l’applicabilità del modello piuttosto che il risultato assoluto ottenibile da questo. Allo scopo inoltre di adattare il rilievo alle esigenze della presente applicazione, i punti sono stati interpolati per creare una maglia regolare con passo pari alla dimensione del pixel e posizionati in corrispondenza al centro di questi. La maglia è stata successivamente sovrapposta all’immagine georiferita e su questa sono stati tracciati perpendicolarmente alla linea di riva (più precisamente trasversalmente alle DOP come si vedrà nel seguito), 28 transetti distanti l’uno dall’altro circa 250 metri. Lungo ciascun transetto si è individuato un punto ogni 100 metri circa. La quota attribuita al punto sul transetto è la medesima del pixel al quale appartiene ed il cui valore è definito dal punto della maglia regolare. Si riporta in figura lo schema geometrico adottato ed i punti scelti.
Figura 4. Schema geometrico del rilievo
4.2 Applicazione del modello di Jupp all’immagine LandsatTM5 del litorale del Poetto in Bilko
L’applicazione del modello di Jupp all’immagine del sensore Landsat all’interno del software Bilko prevede le seguenti fasi: 1. individuazione dell’area denominata di test,
rappresentante le proprietà ottiche delle acque profonde all’interno dell’area di interesse;
2. calcolo dei valori di DN massimo, minimo e medio dell’area di calibrazione dei DN (area di acque profonde);
3. calcolo delle profondità di massima penetrazione per ciascuna DOP;
4. calibrazione del modello e calcolo delle DOP mask; 5. calcolo dei coefficienti A e K; 6. calcolo della batimetria. Come area di calibrazione dei valori di DN è stato individuato un quadrato di 50x50 pixel il cui vertice superiore sinistro ha coordinate immagine 6335, 4840. Per le caratteristiche di Bilko già descritte, le statistiche sui valori di DN dei pixel dell’area di calibrazione sono state ottenute copiando e incollando questi ultimi su un foglio di calcolo.
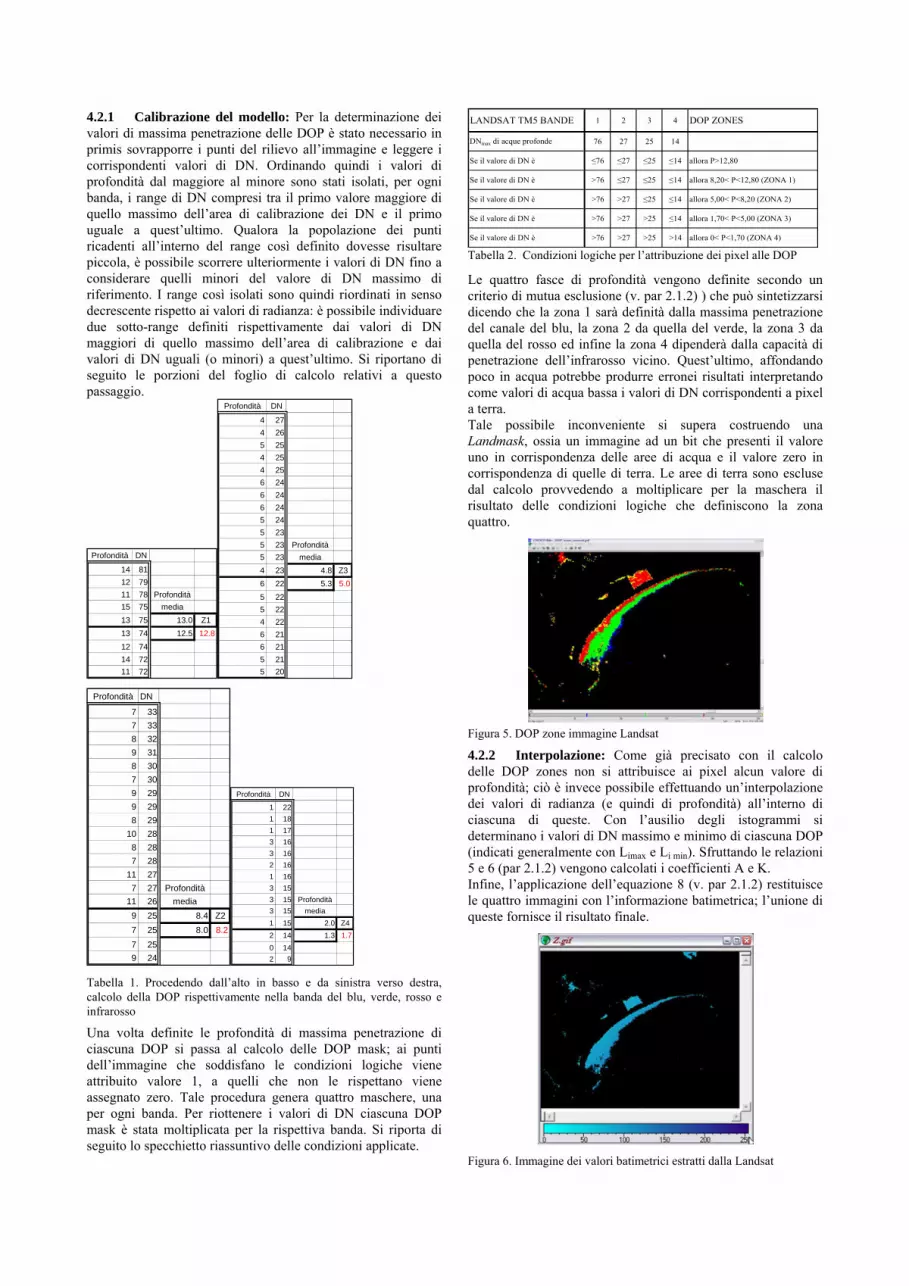
4.2.1 Calibrazione del modello: Per la determinazione dei valori di massima penetrazione delle DOP è stato necessario in primis sovrapporre i punti del rilievo all’immagine e leggere i corrispondenti valori di DN. Ordinando quindi i valori di profondità dal maggiore al minore sono stati isolati, per ogni banda, i range di DN compresi tra il primo valore maggiore di quello massimo dell’area di calibrazione dei DN e il primo uguale a quest’ultimo. Qualora la popolazione dei punti ricadenti all’interno del range così definito dovesse risultare piccola, è possibile scorrere ulteriormente i valori di DN fino a considerare quelli minori del valore di DN massimo di riferimento. I range così isolati sono quindi riordinati in senso decrescente rispetto ai valori di radianza: è possibile individuare due sotto-range definiti rispettivamente dai valori di DN maggiori di quello massimo dell’area di calibrazione e dai valori di DN uguali (o minori) a quest’ultimo. Si riportano di seguito le porzioni del foglio di calcolo relativi a questo passaggio.
LANDSAT TM5 BANDE 1 2 3 4 DOP ZONES
DNmax di acque profonde 76 27 25 14
Se il valore di DN è ≤76 ≤27 ≤25 ≤14 allora P>12,80
Se il valore di DN è >76 ≤27 ≤25 ≤14 allora 8,20< P<12,80 (ZONA 1)
Se il valore di DN è >76 >27 ≤25 ≤14 allora 5,00< P<8,20 (ZONA 2)
Se il valore di DN è >76 >27 >25 ≤14 allora 1,70< P<5,00 (ZONA 3)
Se il valore di DN è >76 >27 >25 >14 allora 0< P<1,70 (ZONA 4)
Tabella 1. Procedendo dall’alto in basso e da sinistra verso destra, calcolo della DOP rispettivamente nella banda del blu, verde, rosso e infrarosso
Una volta definite le profondità di massima penetrazione di ciascuna DOP si passa al calcolo delle DOP mask; ai punti dell’immagine che soddisfano le condizioni logiche viene attribuito valore 1, a quelli che non le rispettano viene assegnato zero. Tale procedura genera quattro maschere, una per ogni banda. Per riottenere i valori di DN ciascuna DOP mask è stata moltiplicata per la rispettiva banda. Si riporta di seguito lo specchietto riassuntivo delle condizioni applicate.
Tabella 2. Condizioni logiche per l’attribuzione dei pixel alle DOP
Le quattro fasce di profondità vengono definite secondo un criterio di mutua esclusione (v. par 2.1.2) ) che può sintetizzarsi dicendo che la zona 1 sarà definità dalla massima penetrazione del canale del blu, la zona 2 da quella del verde, la zona 3 da quella del rosso ed infine la zona 4 dipenderà dalla capacità di penetrazione dell’infrarosso vicino. Quest’ultimo, affondando poco in acqua potrebbe produrre erronei risultati interpretando come valori di acqua bassa i valori di DN corrispondenti a pixel a terra. Tale possibile inconveniente si supera costruendo una Landmask, ossia un immagine ad un bit che presenti il valore uno in corrispondenza delle aree di acqua e il valore zero in corrispondenza di quelle di terra. Le aree di terra sono escluse dal calcolo provvedendo a moltiplicare per la maschera il risultato delle condizioni logiche che definiscono la zona quattro.
Figura 5. DOP zone immagine Landsat
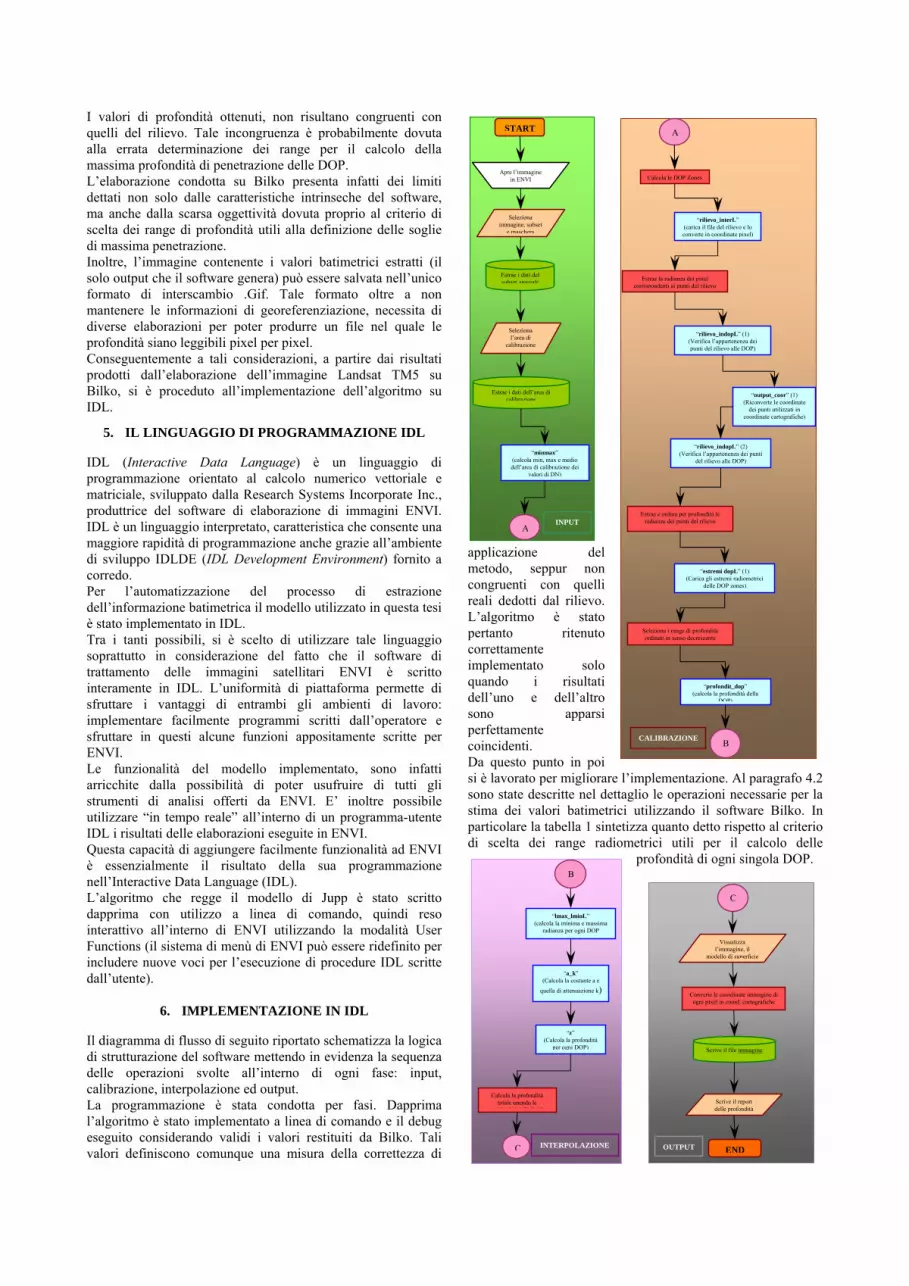
4.2.2 Interpolazione: Come già precisato con il calcolo delle DOP zones non si attribuisce ai pixel alcun valore di profondità; ciò è invece possibile effettuando un’interpolazione dei valori di radianza (e quindi di profondità) all’interno di ciascuna di queste. Con l’ausilio degli istogrammi si determinano i valori di DN massimo e minimo di ciascuna DOP (indicati generalmente con Limax e Li min). Sfruttando le relazioni 5 e 6 (par 2.1.2) vengono calcolati i coefficienti A e K. Infine, l’applicazione dell’equazione 8 (v. par 2.1.2) restituisce le quattro immagini con l’informazione batimetrica; l’unione di queste fornisce il risultato finale.
Figura 6. Immagine dei valori batimetrici estratti dalla Landsat
I valori di profondità ottenuti, non risultano congruenti con quelli del rilievo. Tale incongruenza è probabilmente dovuta alla errata determinazione dei range per il calcolo della massima profondità di penetrazione delle DOP.
Calcola le DOP Zones
“rilievo_interL” (carica il file del rilievo e lo converte in coordinate pixel)
Estrae la radianza dei pixel corrispondenti ai punti del rilievo
“rilievo_indopL” (1) (Verifica l’appartenenza dei punti del rilievo alle DOP)
“output_coor” (1) (Riconverte le coordinate
dei punti utilizzati in coordinate cartografiche)
“rilievo_indopL” (2) (Verifica l’appartenenza dei punti
del rilievo alle DOP)
Estrae e ordina per profondità le radianze dei punti del rilievo
“estremi dopL” (1) (Carica gli estremi radiometrici
delle DOP zones)
Seleziona i range di profondità ordinati in senso decrescente
B
“profondit_dop” (calcola la profondità della
DOP)
START A
CALIBRAZIONE
Seleziona immagine, subset
e maschera
Apre l’immagine in ENVIL’elaborazione condotta su Bilko presenta infatti dei limiti
dettati non solo dalle caratteristiche intrinseche del software, ma anche dalla scarsa oggettività dovuta proprio al criterio di scelta dei range di profondità utili alla definizione delle soglie di massima penetrazione.
Seleziona l’area di
calibrazione
Estrae i dati dell’area di calibrazione
Estrae i dati del subset spaziale
Inoltre, l’immagine contenente i valori batimetrici estratti (il solo output che il software genera) può essere salvata nell’unico formato di interscambio .Gif. Tale formato oltre a non mantenere le informazioni di georeferenziazione, necessita di diverse elaborazioni per poter produrre un file nel quale le profondità siano leggibili pixel per pixel. Conseguentemente a tali considerazioni, a partire dai risultati prodotti dall’elaborazione dell’immagine Landsat TM5 su Bilko, si è proceduto all’implementazione dell’algoritmo su IDL.
“minmax” (calcola min, max e medio dell’area di calibrazione dei
valori di DN)
5. IL LINGUAGGIO DI PROGRAMMAZIONE IDL
IDL (Interactive Data Language) è un linguaggio di programmazione orientato al calcolo numerico vettoriale e matriciale, sviluppato dalla Research Systems Incorporate Inc., produttrice del software di elaborazione di immagini ENVI. IDL è un linguaggio interpretato, caratteristica che consente una maggiore rapidità di programmazione anche grazie all’ambiente di sviluppo IDLDE (IDL Development Environment) fornito a corredo.
INPUT A
Per l’automatizzazione del processo di estrazione dell’informazione batimetrica il modello utilizzato in questa tesi è stato implementato in IDL. Tra i tanti possibili, si è scelto di utilizzare tale linguaggio soprattutto in considerazione del fatto che il software di trattamento delle immagini satellitari ENVI è scritto interamente in IDL. L’uniformità di piattaforma permette di sfruttare i vantaggi di entrambi gli ambienti di lavoro: implementare facilmente programmi scritti dall’operatore e sfruttare in questi alcune funzioni appositamente scritte per ENVI. Le funzionalità del modello implementato, sono infatti arricchite dalla possibilità di poter usufruire di tutti gli strumenti di analisi offerti da ENVI. E’ inoltre possibile utilizzare “in tempo reale” all’interno di un programma-utente IDL i risultati delle elaborazioni eseguite in ENVI. Questa capacità di aggiungere facilmente funzionalità ad ENVI è essenzialmente il risultato della sua programmazione nell’Interactive Data Language (IDL).
Converte le coordinate immagine di ogni pixel in coord. cartografiche
C
Visualizza l’immagine, il
modello di superficie
Scrive il file immagine
Scrive il report delle profondità
ENDOUTPUT
“lmax_lminL” (calcola la minima e massima
radianza per ogni DOP
“a_k” (Calcola la costante a e
quella di attenuazione k)
Calcola la profondità totale unendo le f dità d ll DOP
“z” (Calcola la profondità
per ogni DOP)
C
B
L’algoritmo che regge il modello di Jupp è stato scritto dapprima con utilizzo a linea di comando, quindi reso interattivo all’interno di ENVI utilizzando la modalità User Functions (il sistema di menù di ENVI può essere ridefinito per includere nuove voci per l’esecuzione di procedure IDL scritte dall’utente).
6. IMPLEMENTAZIONE IN IDL
Il diagramma di flusso di seguito riportato schematizza la logica di strutturazione del software mettendo in evidenza la sequenza delle operazioni svolte all’interno di ogni fase: input, calibrazione, interpolazione ed output.
INTERPOLAZIONE
La programmazione è stata condotta per fasi. Dapprima l’algoritmo è stato implementato a linea di comando e il debug eseguito considerando validi i valori restituiti da Bilko. Tali valori definiscono comunque una misura della correttezza di
applicazione del metodo, seppur non congruenti con quelli reali dedotti dal rilievo. L’algoritmo è stato pertanto ritenuto correttamente implementato solo quando i risultati dell’uno e dell’altro sono apparsi perfettamente coincidenti. Da questo punto in poi si è lavorato per migliorare l’implementazione. Al paragrafo 4.2 sono state descritte nel dettaglio le operazioni necessarie per la stima dei valori batimetrici utilizzando il software Bilko. In particolare la tabella 1 sintetizza quanto detto rispetto al criterio di scelta dei range radiometrici utili per il calcolo delle
profondità di ogni singola DOP.
Questa scelta dei range radiometrici non è più effettuata dall’operatore, ma eseguita dal software che la calcola mediando soltanto sui valori di DN corrispondenti ai punti del rilievo che appartengono alla DOP. Perchè possa dirsi che un punto del rilievo appartiene ad una DOP, è sufficiente verificare se il valore di DN ad esso corrispondente rispetta le condizioni logiche imposte dal modello per la definizione delle DOP (si veda la tabella 2). Tale verifica è demandata al software; i punti che non rispettano le condizioni vengono estromessi dal calcolo. Inoltre, se i punti utili per il calcolo consentono medie solo su uno dei due intervalli (l’uno definito dai valori di DN maggiori di quello massimo dell’area di calibrazione rappresentativa delle acque profonde, l’altro da quello dei valori di DN uguali/minori di quest’ultima), viene stampato un messaggio di avviso all’interno dell’interfaccia IDLDE. In questa fase della programmazione il software produce valori corretti e in linea con quelli del rilievo. Il passo successivo è stato quello di rendere interattivo il processo implementando l’algoritmo all’interno del software ENVI. Il fatto che ENVI sia scritto esso stesso in IDL ha permesso di sfruttare le sue interfacce grafiche rendendo User friendly l’applicazione scritta.
6.1 Analisi dei risultati
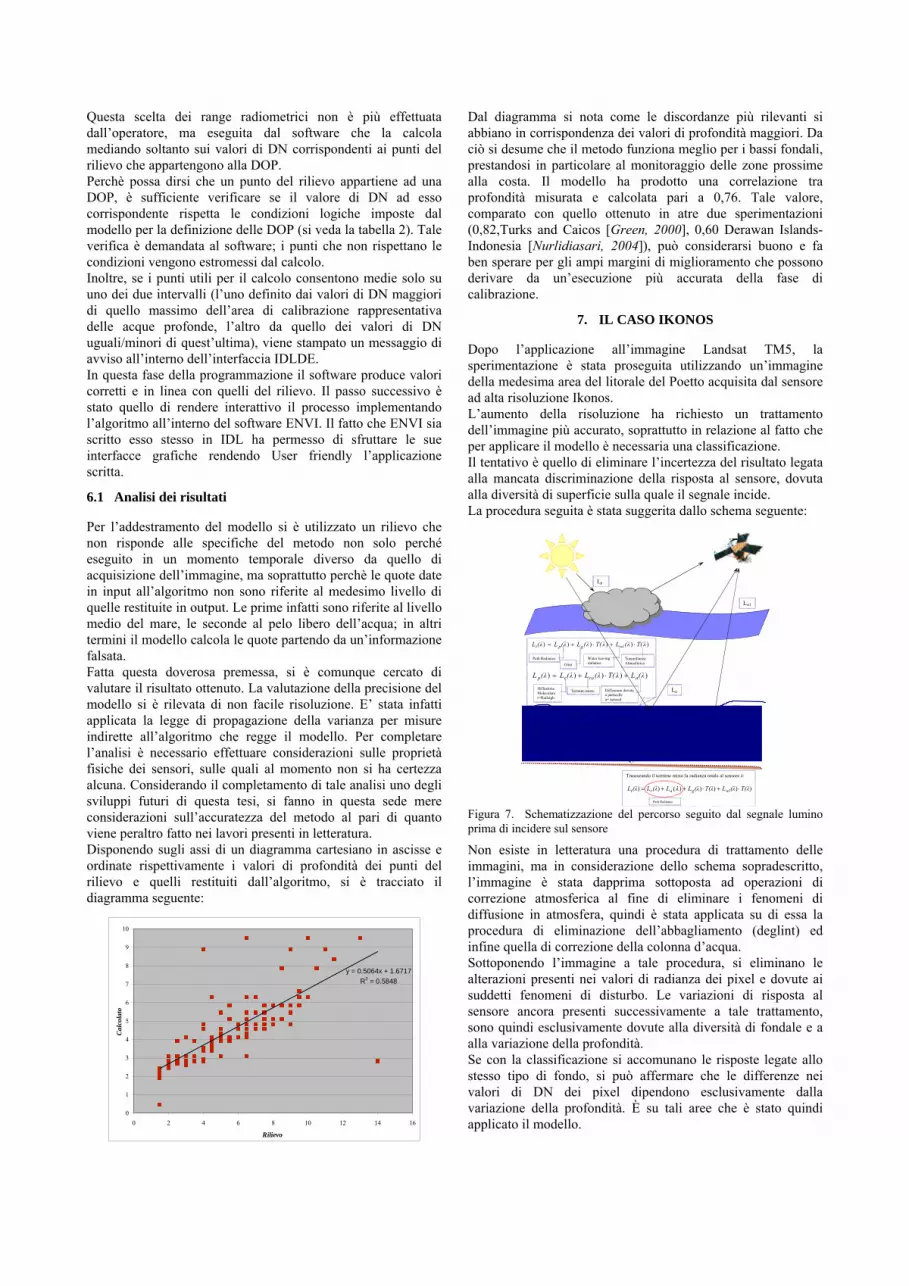
Per l’addestramento del modello si è utilizzato un rilievo che non risponde alle specifiche del metodo non solo perché eseguito in un momento temporale diverso da quello di acquisizione dell’immagine, ma soprattutto perchè le quote date in input all’algoritmo non sono riferite al medesimo livello di quelle restituite in output. Le prime infatti sono riferite al livello medio del mare, le seconde al pelo libero dell’acqua; in altri termini il modello calcola le quote partendo da un’informazione falsata. Fatta questa doverosa premessa, si è comunque cercato di valutare il risultato ottenuto. La valutazione della precisione del modello si è rilevata di non facile risoluzione. E’ stata infatti applicata la legge di propagazione della varianza per misure indirette all’algoritmo che regge il modello. Per completare l’analisi è necessario effettuare considerazioni sulle proprietà fisiche dei sensori, sulle quali al momento non si ha certezza alcuna. Considerando il completamento di tale analisi uno degli sviluppi futuri di questa tesi, si fanno in questa sede mere considerazioni sull’accuratezza del metodo al pari di quanto viene peraltro fatto nei lavori presenti in letteratura. Disponendo sugli assi di un diagramma cartesiano in ascisse e ordinate rispettivamente i valori di profondità dei punti del rilievo e quelli restituiti dall’algoritmo, si è tracciato il diagramma seguente:
y = 0.5064x + 1.6717R2 = 0.5848
0
1
2
3
4
5
6
7
8
9
0 2 4 6 8 10 12 14 1
Rilievo
Cal
cola
toDal diagramma si nota come le discordanze più rilevanti si abbiano in corrispondenza dei valori di profondità maggiori. Da ciò si desume che il metodo funziona meglio per i bassi fondali, prestandosi in particolare al monitoraggio delle zone prossime alla costa. Il modello ha prodotto una correlazione tra profondità misurata e calcolata pari a 0,76. Tale valore, comparato con quello ottenuto in atre due sperimentazioni (0,82,Turks and Caicos [Green, 2000], 0,60 Derawan Islands-Indonesia [Nurlidiasari, 2004]), può considerarsi buono e fa ben sperare per gli ampi margini di miglioramento che possono derivare da un’esecuzione più accurata della fase di calibrazione.
7. IL CASO IKONOS
Dopo l’applicazione all’immagine Landsat TM5, la sperimentazione è stata proseguita utilizzando un’immagine della medesima area del litorale del Poetto acquisita dal sensore ad alta risoluzione Ikonos. L’aumento della risoluzione ha richiesto un trattamento dell’immagine più accurato, soprattutto in relazione al fatto che per applicare il modello è necessaria una classificazione. Il tentativo è quello di eliminare l’incertezza del risultato legata alla mancata discriminazione della risposta al sensore, dovuta alla diversità di superficie sulla quale il segnale incide. La procedura seguita è stata suggerita dallo schema seguente:
Lg
Lwl
Path Radiance
)))))) T( λ(λLT( λ(λL(λL(λL wlgpt ⋅+⋅+=
))))) (λLT( λ(λL(λL(λL ararp +⋅+=
Glint Water leaving radiance
Trasmittanza Atmosferica
Diffusione Molecolare r=Raileigh
Termine misto Diffusione dovuta a particelle a= aerosol
Trascurando il termine misto la radianza totale al sensore è:
)))))()) T(λ(λLT(λ(λLL(λL(λL wlgart ⋅+⋅++= λ
Path Radiance
Lp
Figura 7. Schematizzazione del percorso seguito dal segnale lumino prima di incidere sul sensore
Non esiste in letteratura una procedura di trattamento delle immagini, ma in considerazione dello schema sopradescritto, l’immagine è stata dapprima sottoposta ad operazioni di correzione atmosferica al fine di eliminare i fenomeni di diffusione in atmosfera, quindi è stata applicata su di essa la procedura di eliminazione dell’abbagliamento (deglint) ed infine quella di correzione della colonna d’acqua.
10
6
Sottoponendo l’immagine a tale procedura, si eliminano le alterazioni presenti nei valori di radianza dei pixel e dovute ai suddetti fenomeni di disturbo. Le variazioni di risposta al sensore ancora presenti successivamente a tale trattamento, sono quindi esclusivamente dovute alla diversità di fondale e a alla variazione della profondità. Se con la classificazione si accomunano le risposte legate allo stesso tipo di fondo, si può affermare che le differenze nei valori di DN dei pixel dipendono esclusivamente dalla variazione della profondità. È su tali aree che è stato quindi applicato il modello.
7.1 Il rilievo nel caso dell’immagine Ikonos
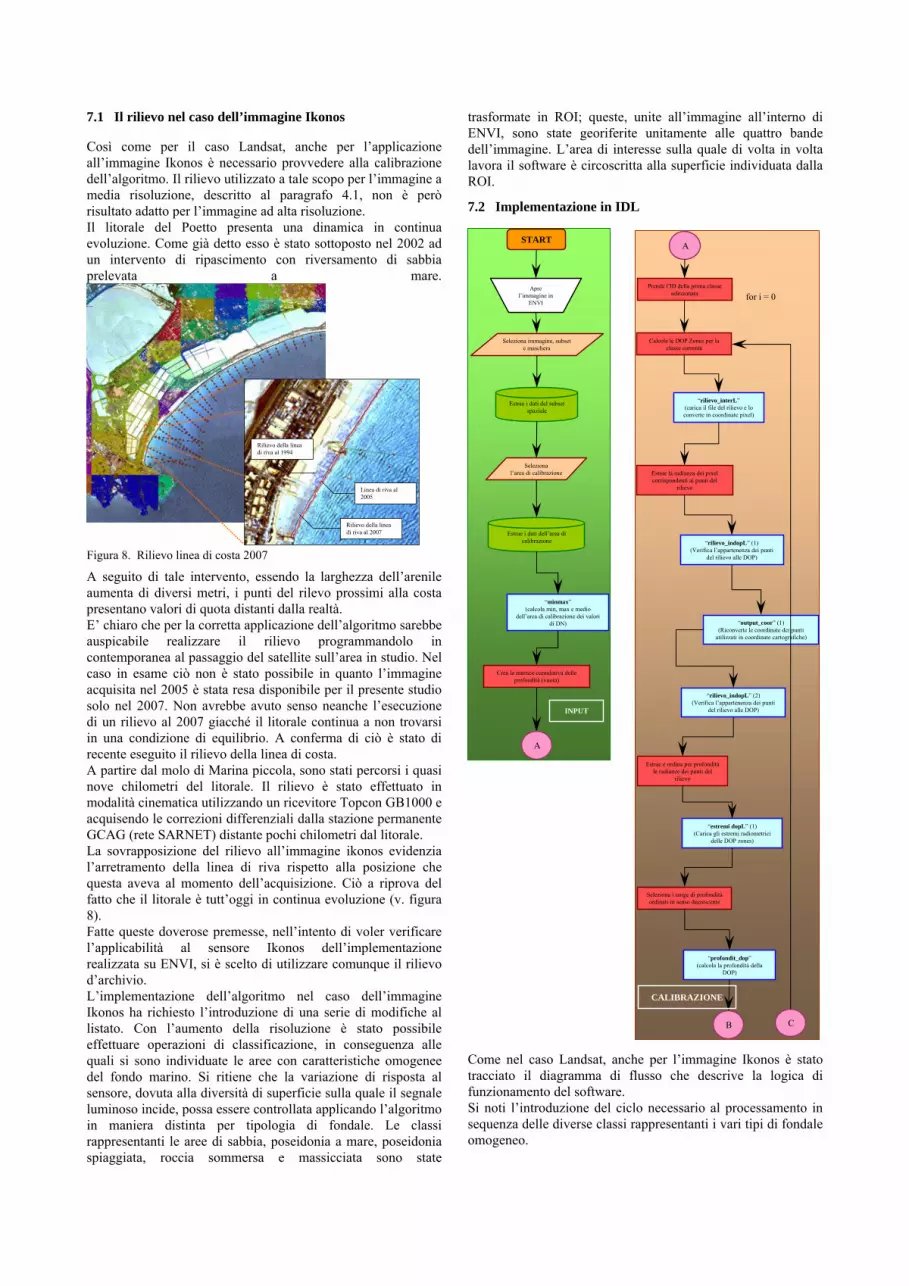
Così come per il caso Landsat, anche per l’applicazione all’immagine Ikonos è necessario provvedere alla calibrazione dell’algoritmo. Il rilievo utilizzato a tale scopo per l’immagine a media risoluzione, descritto al paragrafo 4.1, non è però risultato adatto per l’immagine ad alta risoluzione. Il litorale del Poetto presenta una dinamica in continua evoluzione. Come già detto esso è stato sottoposto nel 2002 ad un intervento di ripascimento con riversamento di sabbia prelevata a mare.
Rilievo della linea di riva al 1994
Rilievo della linea di riva al 2007
Linea di riva al 2005
Calcola le DOP Zones per la classe corrente
“rilievo_interL” (carica il file del rilievo e lo converte in coordinate pixel)
Estrae la radianza dei pixel corrispondenti ai punti del
rilievo
“rilievo_indopL” (1) (Verifica l’appartenenza dei punti
del rilievo alle DOP)
“output_coor” (1) (Riconverte le coordinate dei punti
utilizzati in coordinate cartografiche)
“rilievo_indopL” (2) (Verifica l’appartenenza dei punti
del rilievo alle DOP)
Estrae e ordina per profondità le radianze dei punti del
rilievo
“estremi dopL” (1) (Carica gli estremi radiometrici
delle DOP zones)
Seleziona i range di profondità ordinati in senso decrescente
B
“profondit_dop” (calcola la profondità della
DOP)
A
for i = 0 Prende l’ID della prima classe
selezionata
CALIBRAZIONE
C
Figura 8. Rilievo linea di costa 2007
A seguito di tale intervento, essendo la larghezza dell’arenile aumenta di diversi metri, i punti del rilevo prossimi alla costa presentano valori di quota distanti dalla realtà. E’ chiaro che per la corretta applicazione dell’algoritmo sarebbe auspicabile realizzare il rilievo programmandolo in contemporanea al passaggio del satellite sull’area in studio. Nel caso in esame ciò non è stato possibile in quanto l’immagine acquisita nel 2005 è stata resa disponibile per il presente studio solo nel 2007. Non avrebbe avuto senso neanche l’esecuzione di un rilievo al 2007 giacché il litorale continua a non trovarsi in una condizione di equilibrio. A conferma di ciò è stato di recente eseguito il rilievo della linea di costa. A partire dal molo di Marina piccola, sono stati percorsi i quasi nove chilometri del litorale. Il rilievo è stato effettuato in modalità cinematica utilizzando un ricevitore Topcon GB1000 e acquisendo le correzioni differenziali dalla stazione permanente GCAG (rete SARNET) distante pochi chilometri dal litorale. La sovrapposizione del rilievo all’immagine ikonos evidenzia l’arretramento della linea di riva rispetto alla posizione che questa aveva al momento dell’acquisizione. Ciò a riprova del fatto che il litorale è tutt’oggi in continua evoluzione (v. figura 8). Fatte queste doverose premesse, nell’intento di voler verificare l’applicabilità al sensore Ikonos dell’implementazione realizzata su ENVI, si è scelto di utilizzare comunque il rilievo d’archivio. L’implementazione dell’algoritmo nel caso dell’immagine Ikonos ha richiesto l’introduzione di una serie di modifiche al listato. Con l’aumento della risoluzione è stato possibile effettuare operazioni di classificazione, in conseguenza alle quali si sono individuate le aree con caratteristiche omogenee del fondo marino. Si ritiene che la variazione di risposta al sensore, dovuta alla diversità di superficie sulla quale il segnale luminoso incide, possa essere controllata applicando l’algoritmo in maniera distinta per tipologia di fondale. Le classi rappresentanti le aree di sabbia, poseidonia a mare, poseidonia spiaggiata, roccia sommersa e massicciata sono state
trasformate in ROI; queste, unite all’immagine all’interno di ENVI, sono state georiferite unitamente alle quattro bande dell’immagine. L’area di interesse sulla quale di volta in volta lavora il software è circoscritta alla superficie individuata dalla ROI.
7.2 Implementazione in IDL
START
Come nel caso Landsat, anche per l’immagine Ikonos è stato tracciato il diagramma di flusso che descrive la logica di funzionamento del software. Si noti l’introduzione del ciclo necessario al processamento in sequenza delle diverse classi rappresentanti i vari tipi di fondale omogeneo.
Seleziona immagine, subset e maschera
Apre l’immagine in
ENVI
Estrae i dati del subset spaziale
Seleziona l’area di calibrazione
Estrae i dati dell’area di calibrazione
“minmax” (calcola min, max e medio
dell’area di calibrazione dei valori di DN)
Crea la matrice cumulativa delle profondità (vuota)
INPUT
A
Le fasi mediante le quali il software estrae i valori batimetrici sono ancora quattro e precisamente: input, calibrazione, interpolazione ed output. Con l’immagine Ikonos è infatti possibile far precedere all’applicazione del modello una classificazione ; l’area di interesse può quindi essere definita usando le aree di fondale omogeneo dedotte dall’immagine classificata e trasformate in ROI con operazioni di post classificazione. A differenza del caso Landsat, nel quale l’area di interesse era individuata semplicemente dal taglio eseguito sull’immagine, in questo caso si avranno tante aree di interesse quanti sono i tipi di fondale (o classi). Il tracciamento delle DOP viene realizzato applicando le condizioni logiche all’area definita di volta in volta dalle ROI (nelle quattro bande) piuttosto che dall’area definita dall’immagine (originale o tagliata) come nel caso Landsat. Considerando l’area di calcolo coincidente con la superficie della ROI, potrebbe capitare che i punti del rilievo cadano fuori da questa. In tale circostanza si attribuisce agli indici delle quote valore zero. In caso contrario il calcolo prosegue identico a quello Landsat. Il report dei punti del rilievo utilizzati viene stampato per ogni ROI e per le quattro bande, fatto salvo il caso in cui nessun punto cada all’interno della ROI; in quest’ultimo caso non sarà stampato alcun report. Sono state introdotte le variazioni che contemplano il caso nel quale all’interno della ROI non esistano punti del rilievo con valori di DN maggiori del DN massimo dell’area di calibrazione e/o valori di pixel con DN uguali al DN massimo ancora dell’area di calibrazione. In ciascuno di questi ultimi due casi viene stampato sull’interfaccia IDLDE un messaggio che indica all’operatore di trovarsi nella condizione di “caso speciale”. Se la condizione è invece quella standard, il messaggio stampato sarà “caso generale”.
7.3 Analisi dei risultati
Per l’analisi dei risultati dell’applicazione eseguita sull’immagine Ikonos, sono state effettuate oltre 50 prove.
L’area di calibrazione caratteristica delle acque profonde gioca un ruolo fondamentale per il buon funzionamento dell’algoritmo; la sua posizione è stata variata all’interno della scena nell’intento di individuare un quadrato di 50x50 pixel caratteristico delle proprietà ottiche delle acque profonde presenti nell’immagine. Nonostante le operazioni di preprocesamento eseguite sull’immagine, non è stato possibile eliminare del tutto il rumore presente. In generale i risultati ottenuti possono essere raggruppati nei seguenti due casi: 1. la scelta dell’area di calibrazione consente la
determinazione dei valori batimetrici seppur non congruenti con il rilievo batimetrico;
2. la scelta dell’area di calibrazione non permette il completamento del calcolo in quanto all’interno delle DOP zones non cadono punti del rilievo. In questo caso possono individuarsi due sotto gruppi, quello nel quale la condizione non è rispettata in nessuna DOP, è rispettata solo in qualcuna.
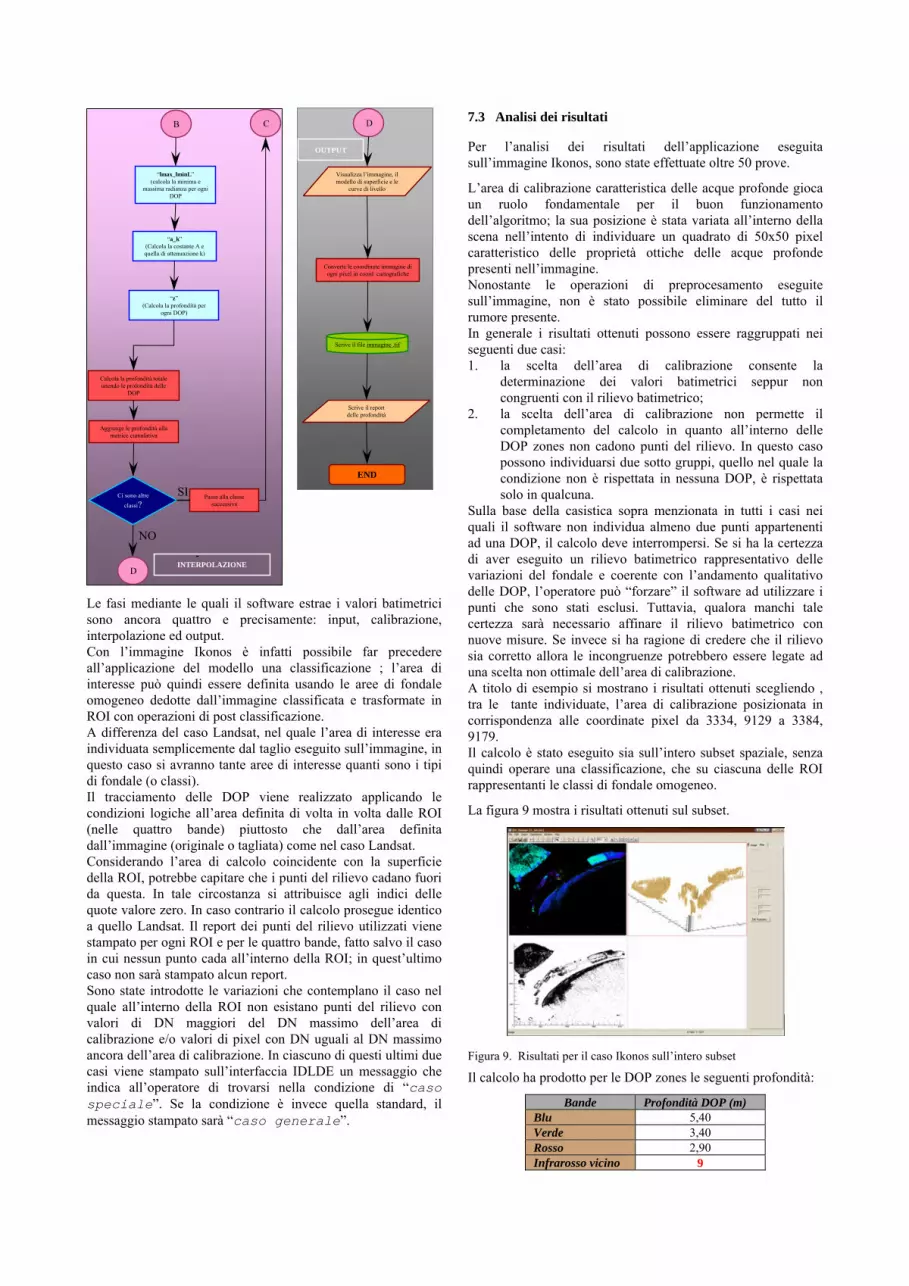
Sulla base della casistica sopra menzionata in tutti i casi nei quali il software non individua almeno due punti appartenenti ad una DOP, il calcolo deve interrompersi. Se si ha la certezza di aver eseguito un rilievo batimetrico rappresentativo delle variazioni del fondale e coerente con l’andamento qualitativo delle DOP, l’operatore può “forzare” il software ad utilizzare i punti che sono stati esclusi. Tuttavia, qualora manchi tale certezza sarà necessario affinare il rilievo batimetrico con nuove misure. Se invece si ha ragione di credere che il rilievo sia corretto allora le incongruenze potrebbero essere legate ad una scelta non ottimale dell’area di calibrazione. A titolo di esempio si mostrano i risultati ottenuti scegliendo , tra le tante individuate, l’area di calibrazione posizionata in corrispondenza alle coordinate pixel da 3334, 9129 a 3384, 9179. Il calcolo è stato eseguito sia sull’intero subset spaziale, senza quindi operare una classificazione, che su ciascuna delle ROI rappresentanti le classi di fondale omogeneo.
La figura 9 mostra i risultati ottenuti sul subset.
Figura 9. Risultati per il caso Ikonos sull’intero subset
Il calcolo ha prodotto per le DOP zones le seguenti profondità:
“a_k” (Calcola la costante A e quella di attenuazione k)
Calcola la profondità totale unendo le profondità delle
DOP
B
“z” (Calcola la profondità per
ogni DOP)
INTERPOLAZIONE D
Aggiunge le profondità alla matrice cumulativa
Ci sono altre
classi?
NO
D C
SI Passa alla classe successiva
Converte le coordinate immagine di ogni pixel in coord. cartografiche
Visualizza l’immagine, il modello di superficie e le
curve di livello
Scrive il file immagine .tif
Scrive il report delle profondità
OUTPUT
END
Si noti come il valore evidenziato in rosso sia incongruente rispetto agli altri, in quanto la massima profondità raggiungibile dalla componente infrarossa non può essere superiore a quella delle altre bande ed in particolar modo a quella del blu. Mantendo la medesima area di calibrazione, il calcolo è stato ripetuto dopo la classificazione. sulla sola ROI rappresentante il fondale sabbioso. La figura 10 mostra il risultato ottenuto.
Figura 10. Risultati per il caso Ikonos sulla classe sabbia
Anche per questo caso i valori di profondità estratti per le DOP zones vengono sintetizzati nella seguente tabella:
I valori nelle prime tre bande sono uguali a quelli del caso precedente mentre la massima profondità di penetrazione dell’infrarosso è passata da 9 a 2 metri, valore più credibile sia rispetto ai suoi limiti teorici che in confronto ai valori delle altre bande. Benché il risultato continui ad essere lontano dalle profondità desunte dal rilievo, la differenza rispetto al caso precedente dimostra come la scelta di isolare il calcolo in porzioni di fondale omogeo si sia rivelata efficace. Analogamente a quanto fatto per il fondale classificato come sabbioso, il calcolo è stato ripetuto per le altre quattro classi: poseidonia a mare, poseidonia piaggiata, roccia sommersa, massicciata. In questi casi però, sono state trovate delle DOP zones in cui non ricadeva alcun punto del rilievo, impedendo così il completamento del calcolo. Tale risultato avvalora la tesi che il rilievo debba essere progettato a seguito della classificazione dei fondali e tenendo conto dell’andamento qualitativo delle DOP. Queste condizioni operative possono essere soddisfatte più facilmente quando si lavori su serie storiche delle immagini cosicché il metodo è più agevolmente utilizzabile per valutare le variazioni.
8. CONCLUSIONI E PROSPETTIVE DI RICERCA
Nell’accezione comune quando si dice Telerilevamento si intende riferirsi alla tecnica di rilievo che concorre all’analisi qualitativa dell’osservazione. In tal senso essa si pone in antitesi alla Fotogrammetria; la tecnica per antonomasia dell’analisi quantitativa dell’osservazione, ossia delle sue caratteristiche geometriche. Fa eccezione l’applicazione oggetto della presente tesi, nella quale il Telerilevamento è stato utilizzato nel senso fotogrammetrico del termine ossia per estrarre da un’immagine un’informazione metrica. L’intento è stato perseguito studiando i modelli presenti in letteratura e capaci di estrarre l’informazione batimetrica. In
questo senso il lavoro fatto dall’UNESCO ha agevolato l’approccio alla materia e suggerito l’indirizzo da dare al lavoro. Il modello di Jupp scelto per l’applicazione, è stato implemento nel linguaggio IDL e grazie a questo aspetto utilizzato all’interno di ENVI, uno dei maggiori software il trattamento del dato telerilevato. Il software scritto ha superato i limiti oggettivi di Bilko, automatizzando il processo e consentendo anche ad operatori non esperti valutazioni di tipo batimetrico. Alla luce della sperimentazione condotta può dirsi che il modulo fornisce uno strumento di calcolo delle profondità semplice e abbastanza veloce. I risultati assoluti ottenuti nei due casi, benché non fossero obiettivo della presente tesi, dimostrano la corretta implementazione del modello e sottolineano la necessità di programmare l’acquisizione al fine di rendere congruenti i valori del rilievo e quelli estratti dall’immagine. Alla luce di quanto fatto si ritiene che la procedura da seguire sia la seguente: 1. preprocessamento dell’immagine; 2. classificazione (soprattutto nel caso di immagine ad alta
risoluzione); 3. tracciamento delle DOP; 4. progetto del rilievo; 5. calcolo delle profondità; 6. eventuale miglioramento del rilievo e nuovo calcolo. Fin qui ciò che è stato fatto.
La tesi apre un ampio ventaglio di possibilità rispetto a quanto possa ancora farsi. Il completamento dell’automatizzazione del processo implementando nel modulo anche gli algoritmi di Sunglint e correzione della colonna d’acqua, ora eseguiti con Bilko, potrebbe essere la prima delle cose da farsi. Ancora, l’applicazione a sensori iperspettrali quali Daedalus o perché no, ad immagini digitali da piattaforma aerea. Per una volta, sarebbe quindi la Fotogrammetria ad ereditare un metodo dal Telerilevamento.
9. BIBLIOGRAFIA
[ENVI, 2000] ENVI Programmer’s Guide, RSI (2000)
[Falchi E., et al. (1993)] Falchi E. et al., La cartografia numerica nel controllo del territorio: determinazione delle variazioni della linea di costa nel litorale di Cagliari, La Sardegna nel mondo mediterraneo, Patron, 1993
[Green 2000] Green E. et al., Remote Sensing for Tropical Coastal Managment, Parigi, UNESCO, 2000
[Mishra, 2004] Mishra D et al.(2004), Bathymetric Mapping Using IKONOS Multispectral Data, GIScience and Remote Sensing, 41,, 301 – 321
[Nurlidiasari, 2004] Nurlidiasari M., The application of quickBird and multitemporal Landsat TM data for coral reef habitat mapping. Case study: Derawan Island, East Kalimantan, Indonesia, Master in Science – International Institute for geo information Science and Earth observation (2004)