
1
A System for Simulation, Emulation, and Deployment of Heterogeneous Wireless
Sensor Networks
Lewis Girod, Thanos Stathopoulos, Nithya Ramanathan, Jeremy Elson, Eric Osterweil, Tom
Schoellhammer, Deborah EstrinCENS, UCLA
Presented by David G. WatsonFriday, July 16, 2004
2
Heterogeneous Systems
● What hardware platform to use for sensor networks?– Motes – most scalable platform to support long
battery lifetimes– Microservers – most capable platforms that can
be readily deployed● Authors contend that both are necessary:
– Many cheap mote-like devices– A few powerful microserver devices
● They have developed a software platform to support both types of device
3
Current Simulation Platforms
● TOSSIM– Simulates motes running TinyOS code
● EmSim– Simulates microservers
● Neither one is sufficient to simulate a heterogeneous system

4
Simulating Heterogeneous Systems
● EmTOS: an extension to EmStar– Enables a complete
NesC/TOS app to run unmodified under EmStar
– Can be used either for deployment or simulation

5
HostMote Protocol
● To communicate with real motes, EmStar uses the HostMote protocol– Works over a serial connection– Failure-tolerant – supports hot-swap of motes
● HostMote can be used for other things as well:– Debugging – motes can transport messages to
microserver– Configuration – reports status of connected mote
6
Microserver Participation in Mote Networks
Microservers can take part in MoteNets in several ways:
● As a serial gateway: attached mote relays data to microserver over serial connection
● Re-implement or port NesC application on microserver platform
● Use EmTOS and extend NesC code under EmStar

7
Modes of Heterogeneous Simulation
Four modes in which the ESS application may be run under EmTOS

8
EmTOS Emulation Modes
● Emulation Mode– all physical motes run Transceiver app– programs are run on simulation host
● Real Mode– all motes run natively– concentrator is run on the simulation machine
● Hybrid Mode– some motes run Transceiver, some run real
code– concentrator runs on sim machine, as do some
motes
9
Performance Analysis
● Comparing Timer Jitter between EmTOS and Mica2– Case 1: One timer, 200ms– Case 2: 3 timers: 100ms, 200ms, 500ms– Case 3: 200ms timer, 120ms timer with 20s task
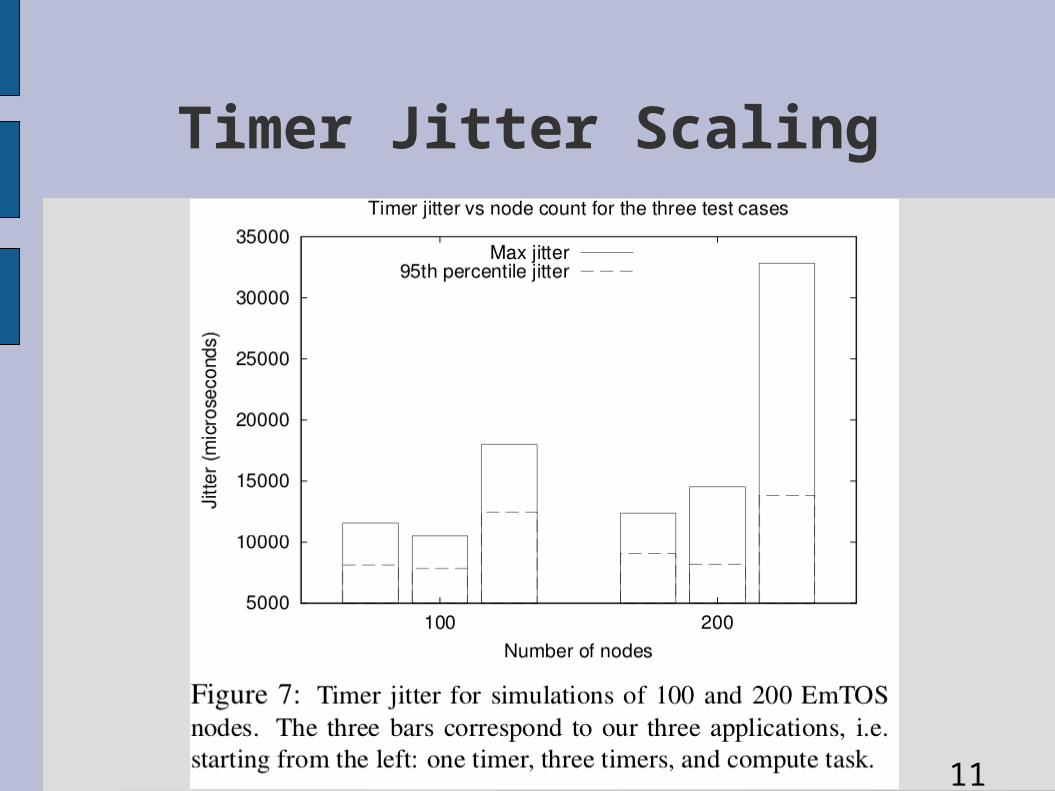
● Timer Jitter Scaling in EmSim– Ran 3 previous experiments at different scales
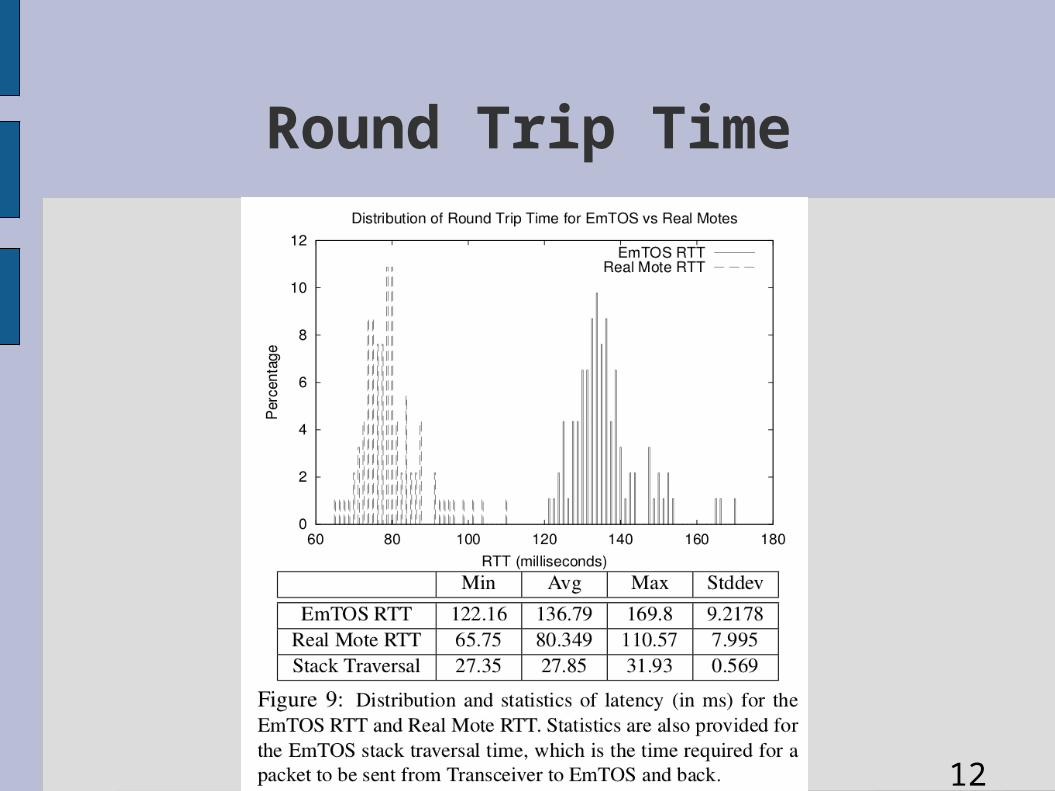
● Comparative Packet Latency in EmTOS– Ran tests comparing Ping times between EmTOS
and real motes

10
Comparative Timer Jitter
Top row is Mica2, Bottom row is EmTOS
11
Timer Jitter Scaling
12
Round Trip Time
13
Future Work
● Determine how TimeWarp affects fidelity at scale
● See if Kernel 2.6 can improve scalability● Fix the ESS application using the EmTOS
tools● Use an EmView Gateway to funnel real data
into analysis and visualization tools







