

11/10/2004 EE 42 fall 2004 lecture 30 1
Lecture #30 Finite State Machines
• Last lecture: – CMOS fabrication– Clocked and latched circuits
• This lecture:– Finite State Machines

11/10/2004 EE 42 fall 2004 lecture 30 2
Finite State Machines
• The digital model we are looking at is an implementation of a finite state machine.
• A FSM has several states, corresponding to the values of each of the registers. Inputs into the machine are combined with the current state of the machine to determine the next state of the machine.
• Most complex digital systems are made from one or more finite state machines, because they can be more easily analyzed than asynchronous digital logic

11/10/2004 EE 42 fall 2004 lecture 30 3
Block diagram
This is a block diagram of a particular kind of FSM. (a Mealy machine with delayed outputs)
Inputs (N) outputs
Clock
Current state of the system: Q(M)
Clock
Combinatorial
Logic
Register
(N+M edge
triggered
flip-flops)

11/10/2004 EE 42 fall 2004 lecture 30 4
Timing diagram for synchronous FSM
Clock
Inputs
State
Output
Logic

11/10/2004 EE 42 fall 2004 lecture 30 5
A computer as a FSM
• A computer could be viewed as a FSM,• or you could view just the CPU as a FSM,
accesses from the main memory as outputting addresses, followed by input of data from the memory, etc.
• A CPU might also be viewed as several interacting FSMs.– An accumulator– A memory interface unit– An instruction sequencer

11/10/2004 EE 42 fall 2004 lecture 30 6
State Transition tables
It is implicit that transitions occur only at discrete times (such as clock edges)
State Input Next state Output
(received 6 bits so far)
Next bit Received 7 bits so far
none
(received 7 bits so far)
Next bit Have received byte
The byte received

11/10/2004 EE 42 fall 2004 lecture 30 7
Defining State Machines
Example: Suppose I am playing a game by tossing a coin.If I toss 3 heads in a row, I win.If I toss a tail before tossing three heads, I lose.
States = {0_heads, 1_head, 2_heads}
Inputs = {head, tail, absent}
Outputs = {win, lose, absent}
initialState = 0_heads

11/10/2004 EE 42 fall 2004 lecture 30 8
Defining State Machines: TableThis state machine can be defined using a table:
(s(n+1), y(n)) = update(s(n), x(n))
x(n) = head x(n) = tail
s(n) = 0_heads
s(n) = 1_head
s(n) = 2_heads
Output absent means that there is no output at this transitionThere is a more visually appealing way to define theupdate function: a state diagram.
(1_head, absent) (0_heads, lose)(2_heads, absent)(0_heads, lose)
(0_heads, win) (0_heads, lose)

11/10/2004 EE 42 fall 2004 lecture 30 9
Defining State Machines: State DiagramTo create a state diagram for a state machine, first draw circles representing the states.
0_heads 1_head 2_heads
For each combination of input and state, draw an arrow from the current state to the next state.Label the arrow with the input and output that create the transition as shown: “input/output”
head / absent head / absent
tail / lose
tail / lose
tail / lose head / win

11/10/2004 EE 42 fall 2004 lecture 30 10
State Machines: State ResponseThe state response is sequence of states resulting from a particular input sequence.
Example: Find the state response and output sequence for
x =
0_heads 1_head 2_heads
head / absent head / absent
tail / lose
tail / lose
tail / lose head / win
tail head head tail

11/10/2004 EE 42 fall 2004 lecture 30 11
Facts About State Machines• The state machines addressed here are called Mealy
machines. Mealy machines generate outputs during state transitions.
• Moore machines generate output while the system is in a particular state (output depends on state only).
• Each transition and output depends only on the current state and current input.
• Previous input elements only affect the transitions and output insofar as they determine the current state.
• A transition will be defined for every possible combination of input and current state.

11/10/2004 EE 42 fall 2004 lecture 30 12
Deterministic vs Nondeterministic
• For the state machines studied in this lecture, there is exactly one possible transition for each combination of current state and input. These state machines are called deterministic.
• Sometimes it is useful to model a system using a state machine that has more than one possible transition for each combination of current state and input. These state machines are called non-deterministic.

11/10/2004 EE 42 fall 2004 lecture 30 13
FSMs in programs
• The finite state machine model can be useful in the design of software as well as the design of hardware.
• If a program is responding to external events, which are not happening in a controlled order, a FSM description of the program can describe its high level operation better than sequential descriptions.

11/10/2004 EE 42 fall 2004 lecture 30 14
Implementing Sequential Logic
• Sequential Circuits– Simple circuits with feedback– Latches– Edge-triggered flip-flops
• Timing Methodologies– Cascading flip-flops for proper operation– Clock skew
• Asynchronous Inputs– Metastability and synchronization
• Basic Registers– Shift registers

11/10/2004 EE 42 fall 2004 lecture 30 15
Sequential Circuits
• Circuits with Feedback– Outputs = f(inputs, past inputs, past outputs)
– Basis for building "memory" into logic circuits• State is memory• State is an "output" and an "input" to combinational logic• Combination storage elements are also memory

11/10/2004 EE 42 fall 2004 lecture 30 16
X1X2•••
Xn
switchingnetwork
Z1Z2•••
Zn
Circuits with Feedback
Need to stop values from cycling around endlessly

11/10/2004 EE 42 fall 2004 lecture 30 17
R
S
Q
Q'
R
S
Q
R'
S'Q
Q
Q'
S'
R'
Memory with Cross-coupled Gates
• Cross-coupled NOR gates– Similar to inverter pair, with capability to force output to 0 (reset=1) or
1 (set=1)
• Cross-coupled NAND gates– Similar to inverter pair, with capability to force output to 0 (reset=0) or
1 (set=0)

11/10/2004 EE 42 fall 2004 lecture 30 18
Reset Hold Set SetReset Race
R
S
Q
\Q
100
Timing Behavior
R
S
Q
Q'
11/10/2004 EE 42 fall 2004 lecture 30 19
Q(t+)
R
S
Q(t)
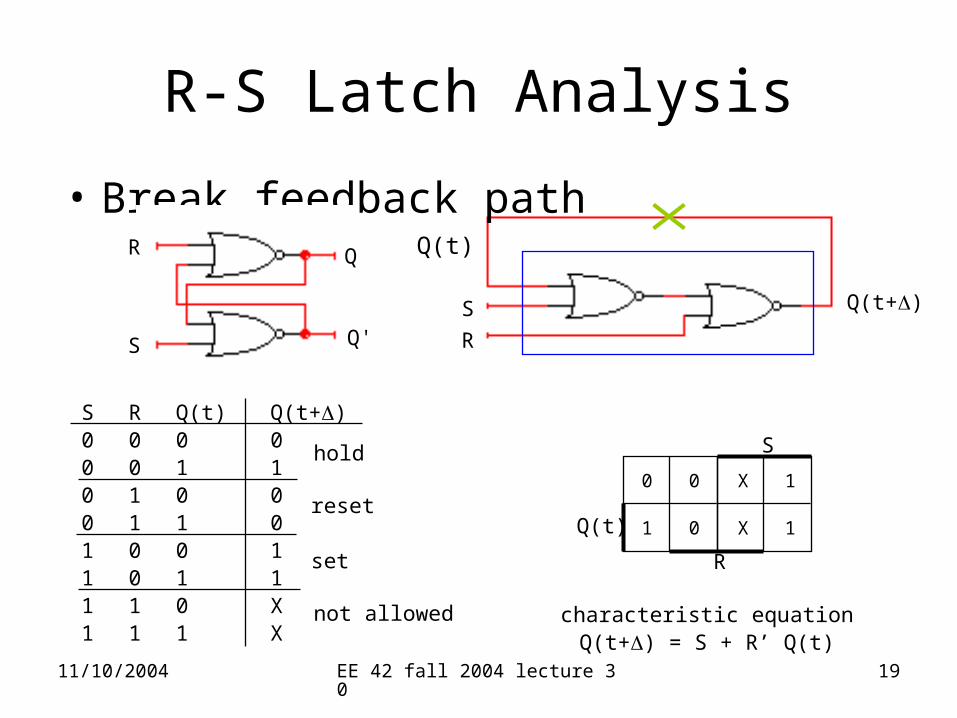
S R Q(t) Q(t+)0 0 0 00 0 1 10 1 0 00 1 1 01 0 0 11 0 1 11 1 0 X1 1 1 X
hold
reset
set
not allowed characteristic equationQ(t+) = S + R’ Q(t)
R-S Latch Analysis
• Break feedback pathR
S
Q
Q'
0 0
1 0
X 1
X 1Q(t)
R
S

11/10/2004 EE 42 fall 2004 lecture 30 20
enable'
S'Q'
QR' R
S
Gated R-S Latch
• Control when R and S inputs matter– Otherwise, the
slightest glitch on R or S while enable is low could cause change in value stored
Set Reset
S'
R'
enable'
Q
Q'
100

11/10/2004 EE 42 fall 2004 lecture 30 21
period
duty cycle (in this case, 50%)
Clocks
• Used to keep time– Wait long enough for inputs (R' and S') to settle– Then allow to have effect on value stored
• Clocks are regular periodic signals– Period (time between ticks)– Duty-cycle (time clock is high between ticks - expressed as % of
period)

11/10/2004 EE 42 fall 2004 lecture 30 22
clock
R' and S'
changing stable changing stablestable
Clocks (cont’d)
• Controlling an R-S latch with a clock– Can't let R and S change while clock is active (allowing R and S
to pass)– Only have half of clock period for signal changes to propagate– Signals must be stable for the other half of clock period
clock'
S'Q'
QR' R
S

11/10/2004 EE 42 fall 2004 lecture 30 23
clock
R
S Q
Q' R
S Q
Q'R
S
Cascading Latches
• Connect output of one latch to input of another• How to stop changes from racing through chain?
– Need to control flow of data from one latch to the next– Advance from one latch per clock period– Worry about logic between latches (arrows) that is too
fast

11/10/2004 EE 42 fall 2004 lecture 30 24
Master-Slave Structure
• Break flow by alternating clocks (like an air-lock)– Use positive clock to latch inputs into one R-S latch– Use negative clock to change outputs with another R-S latch
• View pair as one basic unit– master-slave flip-flop– twice as much logic– output changes a few gate delays after the falling edge of clock
but does not affect any cascaded flip-flopsmaster stage slave stage
P
P'
CLK
R
S Q
Q' R
S Q
Q'R
S

11/10/2004 EE 42 fall 2004 lecture 30 25
Set1s
catch
SR
CLKPP'QQ'
Reset
MasterOutputs
SlaveOutputs
The Catching Problem
• In first R-S stage of master-slave FF– 0-1-0 glitch on R or S while clock is high "caught" by master
stage– Leads to constraints on logic to be hazard-free
master stage slave stage
P
P'
CLK
R
S Q
Q' R
S Q
Q'R
S

11/10/2004 EE 42 fall 2004 lecture 30 2610 gates
D Flip-Flop
• Make S and R complements of each other– Eliminates catching problem– Can't just hold previous value (must have new value ready every
clock period)– Value of D just before clock goes low is what is stored in flip-flop– Can make R-S flip-flop by adding logic to make D = S + R' Q
D Q
Q'
master stage slave stage
P
P'
CLK
R
S Q
Q' R
S Q
Q'

11/10/2004 EE 42 fall 2004 lecture 30 27
Q
D
Clk=1
R
S
0
D’
0
D’ D
Q’
negative edge-triggered D flip-flop (D-FF)
4-5 gate delays
must respect setup and hold time constraints to successfully
capture input
characteristic equationQ(t+1) = D
holds D' whenclock goes low
holds D whenclock goes low
Edge-Triggered Flip-Flops
• More efficient solution: only 6 gates– sensitive to inputs only near edge of clock signal (not while high)







