

1. University of California, San Diego
2. Tsinghua University
An Algorithmic Framework of
Large-Scale Circuit Simulation Using
Exponential Integrators
Hao Zhuang1, Wenjian Yu2, Ilgweon Kang1, Xinan
Wang1, and Chung-Kuan Cheng1

2
Outline
• Motivation & Contributions
• Background of time-domain circuit simulation
• Our algorithmic framework
• Exponential integrators
• Invert Krylov subspace method
• Experimental results
• Conclusions & future directions

Motivation • SPICE
– critical to wide ranges of IC
• Modern IC
– billions of transistors
– complex interconnects
• Requirement:
– new structures e.g., FinFET, 3D
– strong coupled
– post-layout effects
– capability & accuracy
• Simulation runtime
– Long or ∞
3
From Dick Sites, “Datacenter
Computers modern challenges in CPU
design” Google Inc. 2015 & Intel i7
From Synopsys Inc. Issue 3, 2012
Technology Update FinFET: The Promises
and the Challenges

• Target of matrix factorization:
conductance matrix 𝐺 ONLY Less expensive
4
Contributions • Exponential Integration
Stable, Explicit No Newton-Raphson
• Handling tasks (even when traditional schemes
FAIL)
• large-scale, strong coupled, post-layout
A promising framework

Basic & BENR as An Example (1)
• Differential Equations
• BE: Backward Euler
5
capacitance
(/inductance)
conductance
(/incidence)
time step
input
nonlinear devices dynamics

Basic & BENR as An Example (2)
• NR: Newton-Raphson
• BENR: Backward Euler + Newton-Raphson
iterations
6
Jacobian matrix

Basic & BENR as An Example (3)
• NR: Newton-Raphson
• BENR: Backward Euler + Newton-Raphson
iterations
7
Jacobian matrix
capacitance
matrix

Matrix Exponential Method
• Our previous attempt [Weng12]
where
8

Matrix Exponential Method
• Our previous attempt [Weng12]
where
• It also uses NR
The Jacobian matrix
9
capacitance matrix

10
𝐶, 𝐺 matrices from FreeCPU [Zhang, Yu TCAD 2013]
nnz: non-zero terms
𝐺 𝐶
Matrices from a Post-Layout Case

11 𝑙𝑢(𝐶)
𝐶, 𝐺 matrices
𝐺 𝐶
𝐿 𝑈
Matrices from a Post-Layout Case

12
𝑙𝑢(𝐶
+ 𝐺)
𝐶, 𝐺 matrices
𝐺 𝐶 𝐿 𝑈
Matrices from a Post-Layout Case

13
Matrices from a Post-Layout Case
𝐿 and 𝑈 of 𝑙𝑢(𝐶)
𝐿 and 𝑈 of 𝑙𝑢(𝐶
ℎ+ 𝐺)
𝑙𝑢(𝐺)
𝐿 𝑈
𝐶, 𝐺 matrices

14
𝐿 and 𝑈 of 𝑙𝑢(𝐶
ℎ+ 𝐺)
𝐿 and 𝑈 of 𝑙𝑢(𝐺)
In this example, 𝑙𝑢(𝐺) • contains less nnz (~10%)
&
• less complicated nnz
distributions
Matrices from a Post-Layout Case
• Traditional methods are
all challenged by 𝐶,
when 𝐶 is complicated,
• Two techniques:
– ER: Exponential Rosenbrock Formulation
– Invert Krylov subspace to compute 𝑒𝐽𝑣
• Computational advantages
– Simple matrix factorization target: exploit the
feature of 𝑙𝑢(𝐺)
– Stable explicit method to solve circuit system
15
Our proposed framework
ER: Exponential Rosenbrock
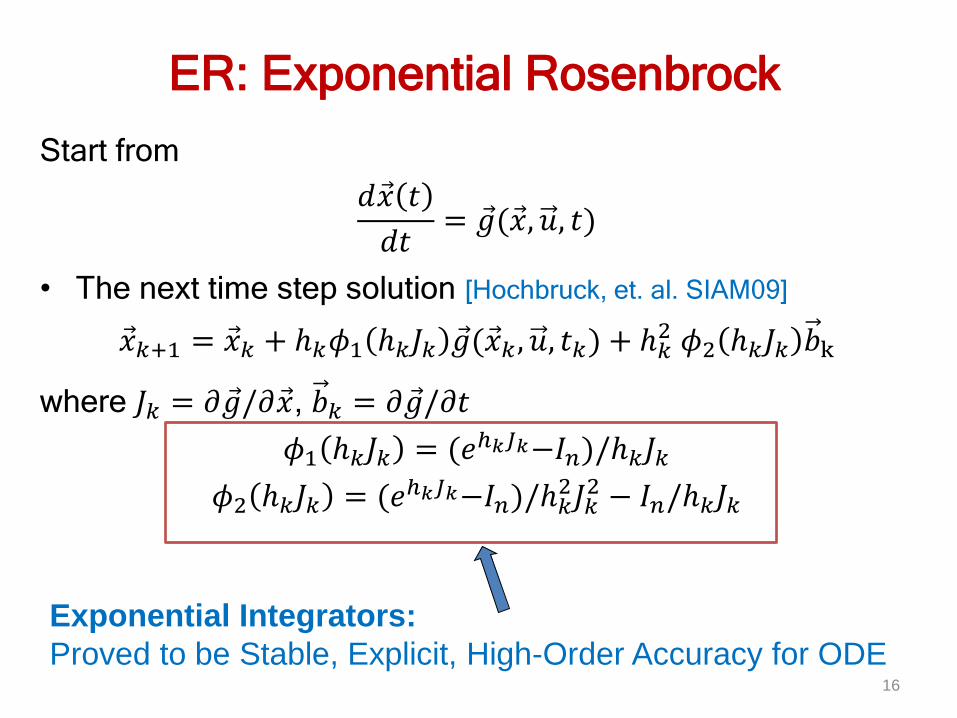
Start from
𝑑𝑥 𝑡
𝑑𝑡= 𝑔 (𝑥 , 𝑢, 𝑡)
• The next time step solution [Hochbruck, et. al. SIAM09]
𝑥 𝑘+1 = 𝑥 𝑘 + 𝑘𝜙1 𝑘𝐽𝑘 𝑔 (𝑥 𝑘 , 𝑢, 𝑡𝑘) + 𝑘2 𝜙2 𝑘𝐽𝑘 𝑏k
where 𝐽𝑘 = 𝜕𝑔 /𝜕𝑥 , 𝑏𝑘 = 𝜕𝑔 /𝜕𝑡
𝜙1 𝑘𝐽𝑘 = (𝑒ℎ𝑘𝐽𝑘−𝐼𝑛)/𝑘𝐽𝑘
𝜙2 𝑘𝐽𝑘 = (𝑒ℎ𝑘𝐽𝑘−𝐼𝑛)/𝑘2𝐽𝑘
2 − 𝐼𝑛/𝑘𝐽𝑘
16
Exponential Integrators:
Proved to be Stable, Explicit, High-Order Accuracy for ODE

ER in Circuit Simulation
Chain rule:
𝑑𝑞 𝑥 𝑡
𝑑𝑥
𝑑𝑥 𝑡
𝑑𝑡= 𝐵𝑢 𝑡 − 𝑓(𝑥 )
where
𝑑𝑞 𝑥 𝑡
𝑑𝑥= 𝐶 𝑥 𝑡 = 𝐶𝑘, 𝐽𝑘 = −𝐶𝑘
−1𝐺𝑘,
𝑔 𝑘 = 𝐽𝑘 + 𝐶𝑘−1 𝐹 𝑘 + 𝐵𝑢 𝑡 , 𝑏𝑘 = 𝐶𝑘
−1 𝐵𝑢 𝑡𝑘+1 −𝐵𝑢 𝑡𝑘
ℎ𝑘
We have ALL the components to obtain 𝑥 𝑘+1
𝑥 𝑘+1(𝑘) = 𝑥 𝑘 + 𝑘𝜙1 𝑘𝐽𝑘 𝑔 (𝑥 𝑘 , 𝑢, 𝑡) + 𝑘2 𝜙2 𝑘𝐽𝑘 𝑏k
17

Local Nonlinear Error Control
The local nonlinear error estimator [Caliari09]
𝑒𝑟𝑟 𝑥 𝑘+1, 𝑥 𝑘 = 𝜙1 𝑘𝐽𝑘 𝐶𝑘−1Δ𝐹 𝑘
where Δ𝐹 𝑘 = 𝐹 𝑥 𝑘+1 − 𝐹 (𝑥 𝑘)
18
ER-C: ER with Correction Term
Reuse Δ𝐹 𝑘 to improve the accuracy by padding
the extra term
𝐷𝑘 = 𝛾𝑘𝜙2 𝑘𝐽𝑘 𝐶𝑘−1Δ𝐹 𝑘
The further corrected solution is
𝑥 𝑘+1,𝑐 = 𝑥 𝑘+1 − 𝐷𝑘

Krylov Method for MEVP 𝑒𝐽𝑣 • 𝑒𝐽𝑣: Matrix Exponential and Vector Product
(MEVP) via standard Krylov subspace [Weng12]
𝐾𝑚 𝐽, 𝑣 ≔ 𝑠𝑝𝑎𝑛 𝑣 , 𝐽𝑣 , 𝐽2𝑣 , … , 𝐽𝑚−1𝑣
– Arnoldi process and Matrix reduction:
𝐽𝑉𝑚 = 𝑉𝑚𝐻𝑚 + 𝑚+1,𝑚𝑣 𝑚+1𝑒 𝑚T
• MEVP is computed by
𝑒𝐽𝑣 ≈ 𝑣 2𝑉𝑚 𝑒𝐻𝑚𝑒 1
• Explicit feature: time stepping only by scaling 𝐻𝑚
with h,
𝑒ℎ𝐽𝑣 ≈ 𝑣 2𝑉𝑚 𝑒ℎ𝐻𝑚𝑒 1
19

20
Standard Krylov subspace
Im
Re 0
“like” these eigenvalues
Eigenvalues of J: small magnitude of Re
Eigenvalues of J: large magnitude of Re
(a) Standard Krylov Basis [Weng12]
𝐾𝑚 𝐽, 𝑣 ≔ 𝑠𝑝𝑎𝑛 𝑣 , 𝐽𝑣 , 𝐽2𝑣 , … , 𝐽𝑚−1𝑣
spectrum of
𝐽 = −𝑪−𝟏𝑮

21
Standard Krylov subspace
Im
Re 0
• these eigenvalues
defines the major
dynamical behavior
• demand more bases to
characterize
Eigenvalues of J: small magnitude of Re
Eigenvalues of J: large magnitude of Re
(a) Standard Krylov Basis [Weng12]
𝐾𝑚 𝐽, 𝑣 ≔ 𝑠𝑝𝑎𝑛 𝑣 , 𝐽𝑣 , 𝐽2𝑣 , … , 𝐽𝑚−1𝑣
spectrum of
𝐽 = −𝑪−𝟏𝑮
22
Im
Re
Im
Re 0 0
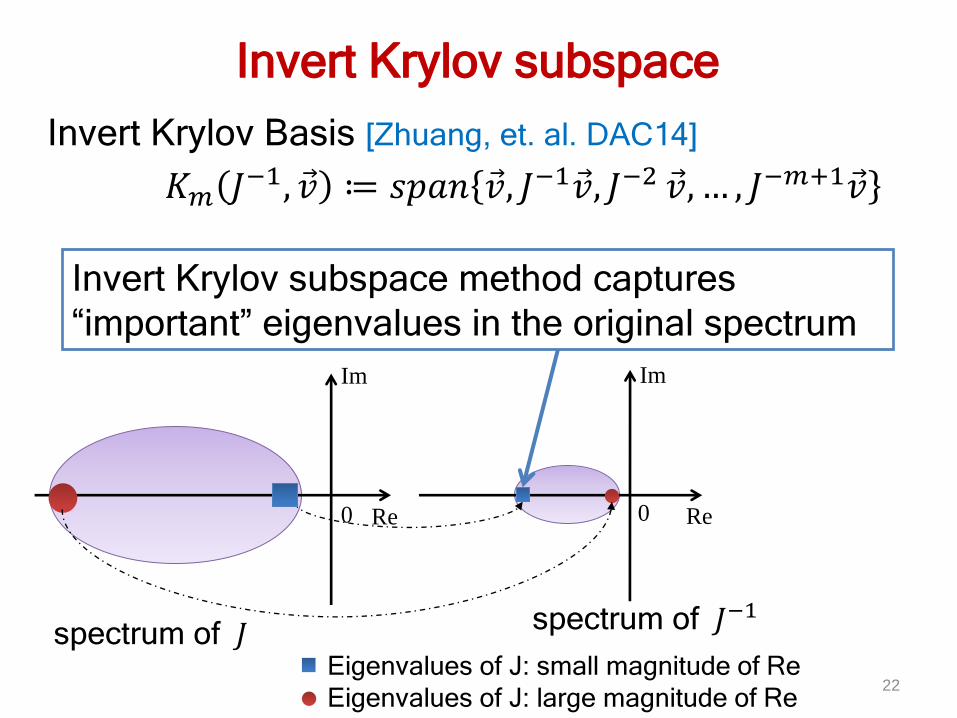
Invert Krylov subspace method captures
“important” eigenvalues in the original spectrum
Eigenvalues of J: small magnitude of Re
Eigenvalues of J: large magnitude of Re
Invert Krylov subspace
Invert Krylov Basis [Zhuang, et. al. DAC14]
𝐾𝑚 𝐽−1, 𝑣 ≔ 𝑠𝑝𝑎𝑛 𝑣 , 𝐽−1𝑣 , 𝐽−2 𝑣 , … , 𝐽−𝑚+1𝑣
spectrum of 𝐽−1 spectrum of 𝐽

Simple Matrix Fct. Taget
23
Invert Krylov Subspace approach transfers
𝐽 = −𝐶−1𝐺 𝐽−1= −𝐺−1𝐶
At each iteration, we
generate invert
Krylov subspace
𝑉𝑚 = 𝑣 1, 𝑣 2, ⋯ , 𝑣 𝑚
by solving
−𝑮𝒘 = 𝑪𝒗𝒊−𝟏

24
Overall Framework
ER-C: further
improve the solution
• No Newton-Raphson
• Build upon exponential
integrators
• explicit method for
DAE solver
• adjust error by step
size control

Experimental Results
• Implemented in MATLAB2013a & C/C++ (GCC
4.7.3)
– Opensource BSIM3 device model with C
– MATLAB Executable (MEX) external interface
between device evaluation and matrix solvers
• Linux workstation
– Intel CPU i7 3.4GHZ
– 32GB memory.
– Utilize single thread mode.
25

Accuracy
26

27
Runtime Performance • #Dev.: the number of devices.
• nnzC & nnzG: the number of non-zero
elements in linear C and G.
• #step: the number of steps for transient
simulation;
For each time step,
• #NRa: the average NR iterations
• #ma: the average dimension of invert
Krylov subspace
• RT(s): the runtime.
• SP: the runtime speedup Test circuits
28
Conclusions and Future Directions
Accelerate SPICE-level time-domain simulation
• Exponential Integrators
• Stable explicit formulation
• 𝑒𝐽𝑣 w/ invert Krylov Subspace & Less expensive matrix factorizations.
• Handling tasks even when traditional methods fail.
Future directions:
• parallelism, can be accelerated further by multicore/many-core computing systems.
• many derivatives & tools can be built upon.

Thanks and Q&A
29







