

Delay Analysis for Maximal Scheduling in
Wireless Networks with Bursty Traffic
Michael J. NeelyUniversity of Southern California
INFOCOM 2008, Phoenix, AZ
*Sponsored in part by the DARPA IT-MANET Program, NSF OCE-0520324, NSF Career CCF-0747525
ON OFF
ON OFF
ON OFF
Capacity Region
-scaled region ON OFF

One-Hop Network Model:
N = Node set = {1, 2…, N}L = Link set = {1, 2, …, L}
Sl = Interference Set for link l L
General Interference Set Model: Sl = l U {links that interfere with link l transmission}
[Chaporkar, Kar, Sarkar Allerton 2005][Wu, Srikant, Perkins, Trans. Mobile Comput. June 2007]

One-Hop Network Model:
N = Node set = {1, 2…, N}L = Link set = {1, 2, …, L}
Sl = Interference Set for link l L
General Interference Set Model: Sl = l U {links that interfere with link l transmission}
[Chaporkar, Kar, Sarkar Allerton 2005][Wu, Srikant, Perkins, Trans. Mobile Comput. June 2007]
Example: Matching, NxN Switch
Link l

One-Hop Network Model:
N = Node set = {1, 2…, N}L = Link set = {1, 2, …, L}
Sl = Interference Set for link l L
General Interference Set Model: Sl = l U {links that interfere with link l transmission}
[Chaporkar, Kar, Sarkar Allerton 2005][Wu, Srikant, Perkins, Trans. Mobile Comput. June 2007]
Example: Matching, NxN Switch
Set Sl

One-Hop Network Model:
N = Node set = {1, 2…, N}L = Link set = {1, 2, …, L}
Sl = Interference Set for link l L
General Interference Set Model: Sl = l U {links that interfere with link l transmission}
[Chaporkar, Kar, Sarkar Allerton 2005][Wu, Srikant, Perkins, Trans. Mobile Comput. June 2007]
Example: Matching, Wireless
Link l

One-Hop Network Model:
N = Node set = {1, 2…, N}L = Link set = {1, 2, …, L}
Sl = Interference Set for link l L
General Interference Set Model: Sl = l U {links that interfere with link l transmission}
[Chaporkar, Kar, Sarkar Allerton 2005][Wu, Srikant, Perkins, Trans. Mobile Comput. June 2007]
Example: Matching, Wireless
Set Sl

One-Hop Network Model:
N = Node set = {1, 2…, N}L = Link set = {1, 2, …, L}
Sl = Interference Set for link l L
General Interference Set Model: Sl = l U {links that interfere with link l transmission}
[Chaporkar, Kar, Sarkar Allerton 2005][Wu, Srikant, Perkins, Trans. Mobile Comput. June 2007]
Example: Arb. Interference Sets

Queueing Dynamics: -Slotted System: t = {0, 1, 2, 3, …}-One Queue for each link l: Ql(t) = # packets in currently in queue l (on slot t) Al(t) = # new packet arrivals to queue l (on slot t) l(t) = # packets served from queue l (on slot t)
Al(t) l(t)
Ql(t)
Ql(t+1) = Ql(t) - l(t) + Al(t)
l(t) {0, 1}l(t) = 1 only if Ql(t)>0 AND no other active links Sl
X(t) ={Scheduling Options}

Queueing Dynamics: -Slotted System: t = {0, 1, 2, 3, …}-One Queue for each link l: Ql(t) = # packets in currently in queue l (on slot t) Al(t) = # new packet arrivals to queue l (on slot t) l(t) = # packets served from queue l (on slot t)
Al(t) l(t)
Ql(t)
Ql(t+1) = Ql(t) - l(t) + Al(t)
l(t) {0, 1}l(t) = 1 only if Ql(t)>0 AND no other active links Sl
X(t) ={Scheduling Options}

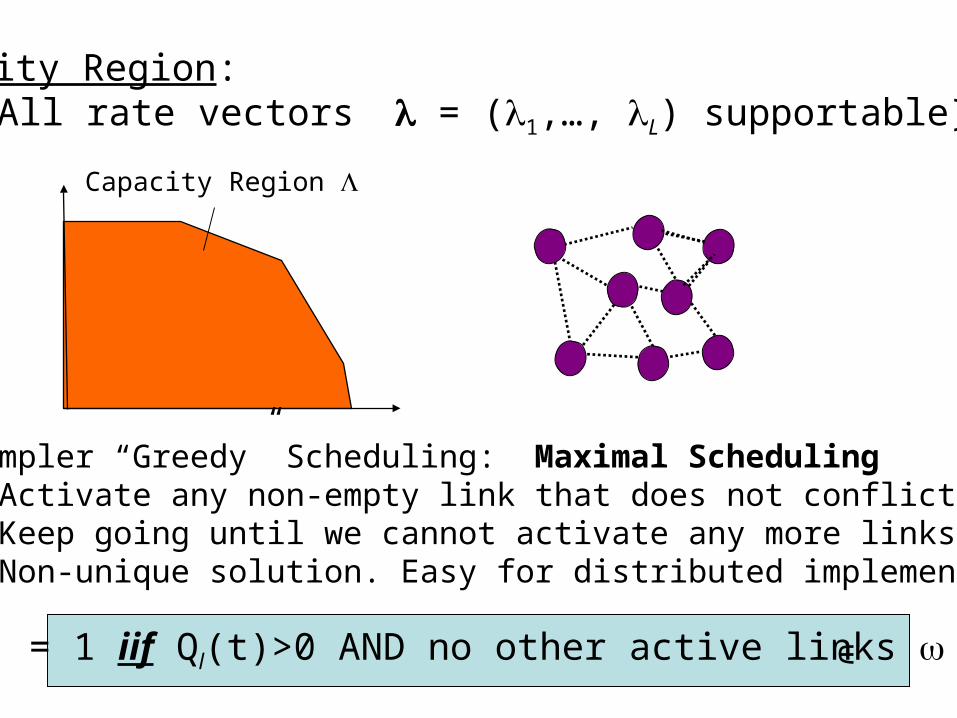
Capacity Region: = {All rate vectors = (1,…, L) supportable}
Capacity Region
[Tassiulas, Ephremides 92]: Max Weight Match (MWM)
Maximize Ql(t)l(t) Subject to:
(Stabilizes Network, Supports all interior to
(t) X(t)
Capacity Region: = {All rate vectors = (1,…, L) supportable}
Capacity Region
Simpler “Greedy” Scheduling: Maximal Scheduling -Activate any non-empty link that does not conflict. -Keep going until we cannot activate any more links. -Non-unique solution. Easy for distributed implementation. l(t) = 1 iif Ql(t)>0 AND no other active links Sl

Capacity Region: = {All rate vectors = (1,…, L) supportable}
Capacity Region
Simpler “Greedy” Scheduling: Maximal Scheduling -Activate any non-empty link that does not conflict. -Keep going until we cannot activate any more links. -Non-unique solution. Easy for distributed implementation. l(t) = 1 iif Ql(t)>0 AND no other active links Sl

Capacity Region: = {All rate vectors = (1,…, L) supportable}
Capacity Region
Simpler “Greedy” Scheduling: Maximal Scheduling -Activate any non-empty link that does not conflict. -Keep going until we cannot activate any more links. -Non-unique solution. Easy for distributed implementation. l(t) = 1 iif Ql(t)>0 AND no other active links Sl

Capacity Region: = {All rate vectors = (1,…, L) supportable}
Capacity Region
Simpler “Greedy” Scheduling: Maximal Scheduling -Activate any non-empty link that does not conflict. -Keep going until we cannot activate any more links. -Non-unique solution. Easy for distributed implementation. l(t) = 1 iif Ql(t)>0 AND no other active links Sl

Capacity Region: = {All rate vectors = (1,…, L) supportable}
Capacity Region
-scaled region
Constant-Factor Throughput Results for Maximal Scheduling:[Shah 2003]: 1/2-factor, Matching on NxN Switches[Lin, Shroff 2005]: 1/2-factor, Matching on Graphs[Chaporkar, Kar, Sarkar 2005]: -factor, General Constraint Sets[Wu, Srikant, Perkins 05, 07]: -factor, General Constraint Sets

Prior Delay Results: Network of Size N nodes
[Leonardi, Mellia, Neri, Marsan Infocom 2001]: NxN Packet Switch, full thruput, MWM, iid arrivals Delay = O(N).
[Neely, Modiano, Cheng HPSR 04, TON 07]: NxN Packet Switch, full thruput, MSM-variation, iid arrivals, Delay = O(log(N)).
[Deb, Shah, Shakkottai CISS 06]: NxN Packet Switch, 1/2 thruput, iid arrivals Maximal Matching, Delay = O(1).

Goals of this paper: Develop a unified treatment of throughput/delay for maximal scheduling with bursty arrivals
-Develop Order-Optimal Delay Results-Treat General Interference Sets-Treat Time-Correllated “Bursty” (non-iid) Arrivals
We will: 1) Define “Reduced Throughput Region” *2) Get Structural Result for General Markovian Traffic: Delay =O(log(# interferers)) 3) Tight and order-optimal (Delay = O(1)) results for 2-state Markov arrivals (such as ON/OFF processes)4) Get Delay Bounds as a function of spatio-temporal corellations in arrival processes.

Markov Arrival Model:
-Arrivals Al(t) modulated by ergodic DTMC Zl(t). -Finite State: Zl = {1, …, Ml}
pl, m(a) = Pr[Al(t)=a| Zl(t)=m] for a {0, 1, 2, …}
l, m = E{Al(t)| Zl(t)=m} , l = E{Al(t)} = l, m l, m
Assume E{Al(t)| Zl(t)=m} < infinity for all states m
Example (M = 2 states):
1 2
l
l
[Possibly ON/OFF process]
m
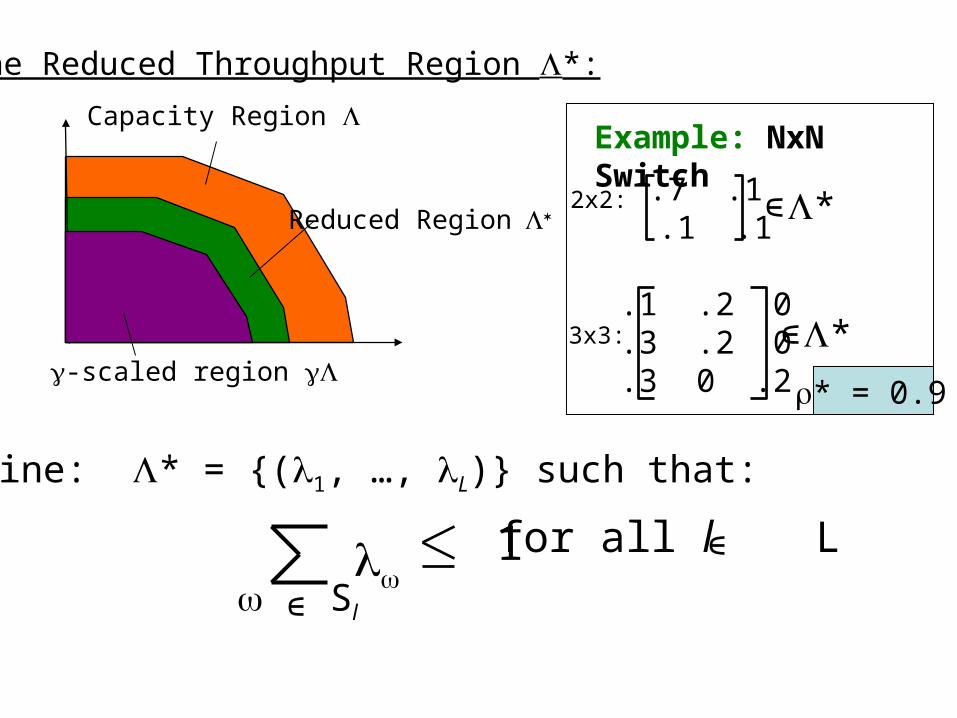
The Reduced Throughput Region *:
Capacity Region
-scaled region
Reduced Region
Define: * = {(1, …, L)} such that:
Sl
1 for all l L
Example: NxN Switch
.7 .1 .1 .1
.1 .2 0 .3 .2 0 .3 0 .2
*
*
* = 0.9
2x2:
3x3:

The Reduced Throughput Region *:
Capacity Region
-scaled region
Reduced Region
Example: NxN Switch
.7 .1 .1 .1
.1 .2 0 .3 .2 0 .3 0 .2
*
*
* = 0.9
2x2:
3x3:
* is typically within a constant factor of [Chaporkar, Kar, Sarkar 05][Lin, Shroff 05]Example: (Bipartite Matching) * is strictly larger than /2
Sl
1 l L*:

Delay Analysis for Maximal Scheduling (General Interference Sets):
Q(t) = Queue vector = (Q1(t), …, QL(t))
Use concept of Queue Grouping:
Lyapunov Function:
L(Q(t)) =
QSl(t) = Sl
Q(t)
l L
12 Ql(t)QSl(t)
Similar Lyapunov Functions used for stability analysis in: [Dai, Prabhakar 2000] , [Wu, Srikant, Perkins 07]

1-step Unconditional Lyapunov Drift (t):
(t) = E{L(Q(t+1)) - L(Q(t))}
Drift Theorem:
Sl iff l S
(t) = B -
Proof Uses Pair-wise Symmetry Property of the General Interference Sets:
l LE{ Ql(t) (1 - ASl(t)) }
B = Const Depends on Spatial Correlations E{AlA} ASl(t) =
Sl
A(t) = “group” arrivals for Sl
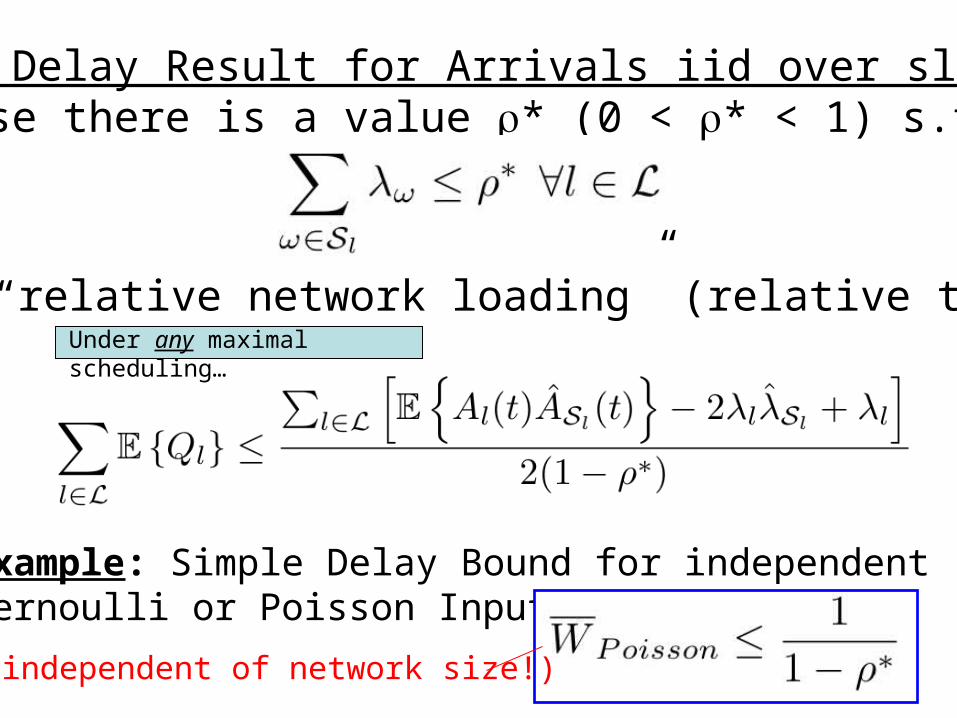
Quick Delay Result for Arrivals iid over slots:Suppose there is a value * (0 < * < 1) s.t.:
* = “relative network loading” (relative to *)
Example: Simple Delay Bound for independent Bernoulli or Poisson Inputs:
(independent of network size!)
Under any maximal scheduling…

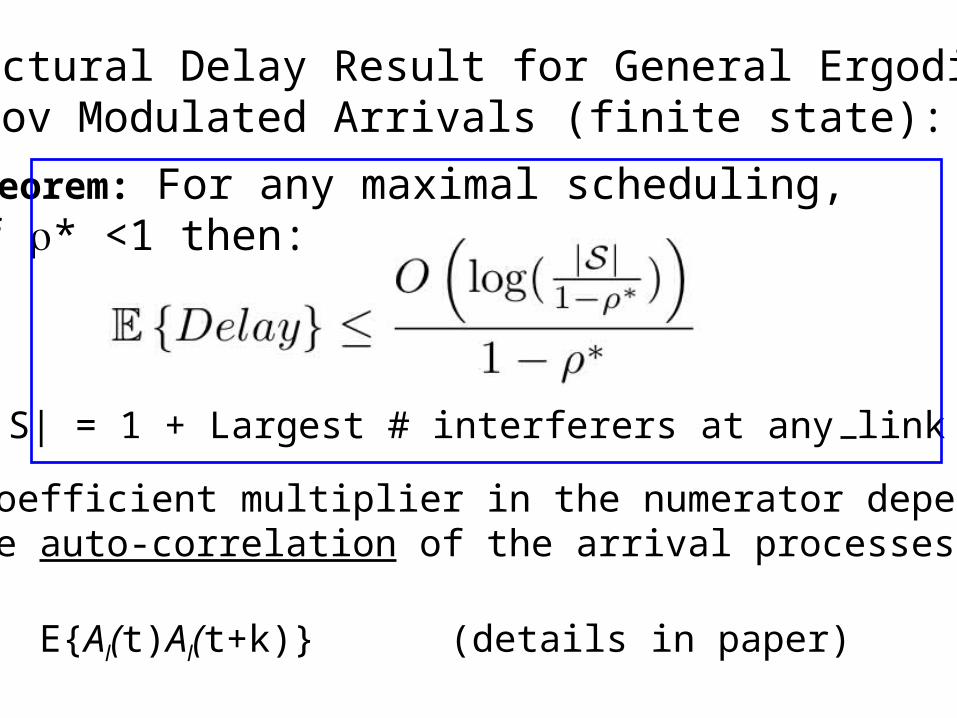
Structural Delay Result for General ErgodicMarkov Modulated Arrivals (finite state):
Theorem: For any maximal scheduling, if * <1 then:
where |S| = 1 + Largest # interferers at any link (< N).
Proof: Uses a Delayed Lyapunov Analysis techniqueto couple sufficiently fast to the stationary distribution.The technique is different from the T-Slot Lyapunov technique of [Georgiadis, Neely, Tassiulas NOW F&T 2006], which would yield looser (O(N)) delay results for bursty arrivals.
Structural Delay Result for General ErgodicMarkov Modulated Arrivals (finite state):
Theorem: For any maximal scheduling, if * <1 then:
where |S| = 1 + Largest # interferers at any link (< N).
The coefficient multiplier in the numerator depends on the auto-correlation of the arrival processes Al(t):
E{Al(t)Al(t+k)} (details in paper)

More Detailed Analysis for 2-State Markov Modulated Arrivals:
1 2
l
l
Each Al(t) has 2-state chain Zl(t):
Pr[Al(t) = a| Zl(t) = 1] = general dist., rate l
Pr[Al(t) = a| Zl(t) = 2] = general dist., rate l
(1)
(2)
Important Special Case: 2-State ON/OFF Processes:
ON OFF
l
l

Tight (order-optimal) Delay Analysis for 2-State Markov Modulated Arrivals:
1 2
l
l
Challenge: Lyapunov Drift term contains: E{Ql(t)Al(t)}, E{Ql(t)A(t)}
These Corellations are Difficult to understand!
Solution:Use a combination of Lyapunov Drift, Steady StateMarkov Chain theory, and Linear Algebra. We canisolate and bound the unknown correlations!

Tight Delay Result (2-State Arrival Processes):
Theorem: For any maximal scheduling, if * <1:
Where:
Example: For independent ON/OFF arrival processes, we have…
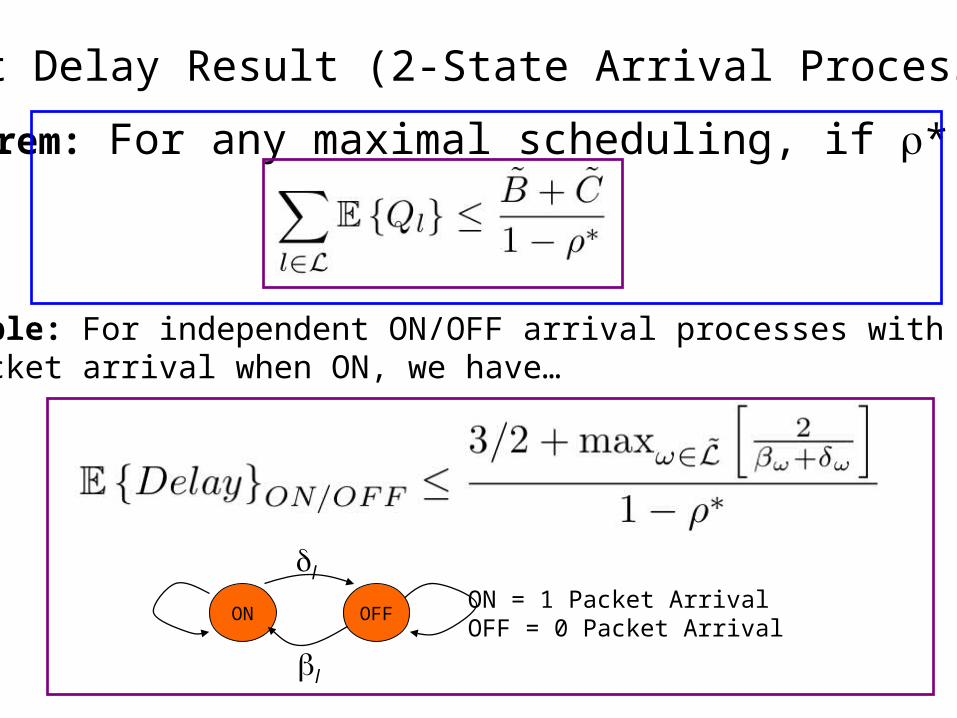
Tight Delay Result (2-State Arrival Processes):
Theorem: For any maximal scheduling, if * <1:
Example: For independent ON/OFF arrival processes with 1 packet arrival when ON, we have…
ON OFF
l
l
ON = 1 Packet ArrivalOFF = 0 Packet Arrival

Conclusions:
ON OFF
l
l
ON = 1 Packet ArrivalOFF = 0 Packet Arrival
Maximal SchedulingGeneral Interference SetsLog(N) Delay Results for General Markov ArrivalsTight and Order-Optimal (Delay = O(1)) Delay Results for 2-State Chains







