
Delay-Tolerant Communication using Aerial
Mobile Robotic Helper Nodes
Daniel HenkelApril 4, 2008
recuv.colorado.edu

Overview
• DTN Test Bed• Direct, Relay, Ferry Models• Relay Optimization• Choosing Optimal Mode• Sensor Data Collection

University of ColoradoLocation
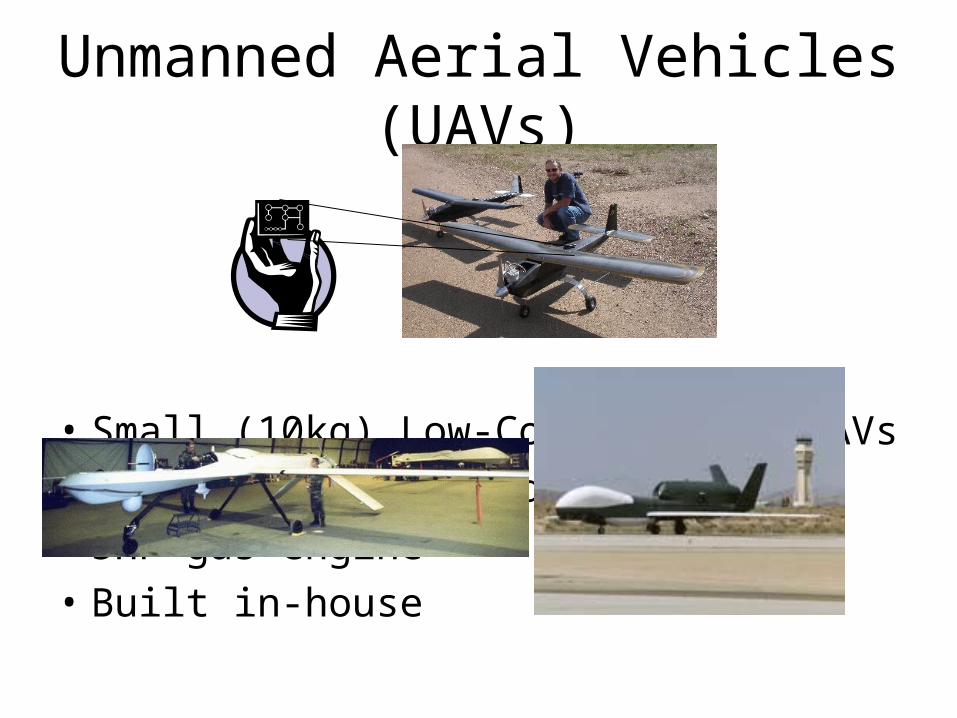
Unmanned Aerial Vehicles (UAVs)
• Small (10kg) Low-Cost (<$10k) UAVs• 60-100km/h, 1hr endurance• 5HP gas engine• Built in-house

Ad hoc UAV-Ground Networks
NOC
Scenario 1: increase ground node connectivity.
Scenario 2: increase UAV mission range.

Applications
Military Intelligence, Surveillance, Reconnaissance (ISR) Border Patrol
Scientific Atmospheric Research (NIST, NCAR) Tornado/Hurricane & Arctic Research
Civil / Commercial Disaster Communication & Intelligence (Fire) Sensor Data Collection
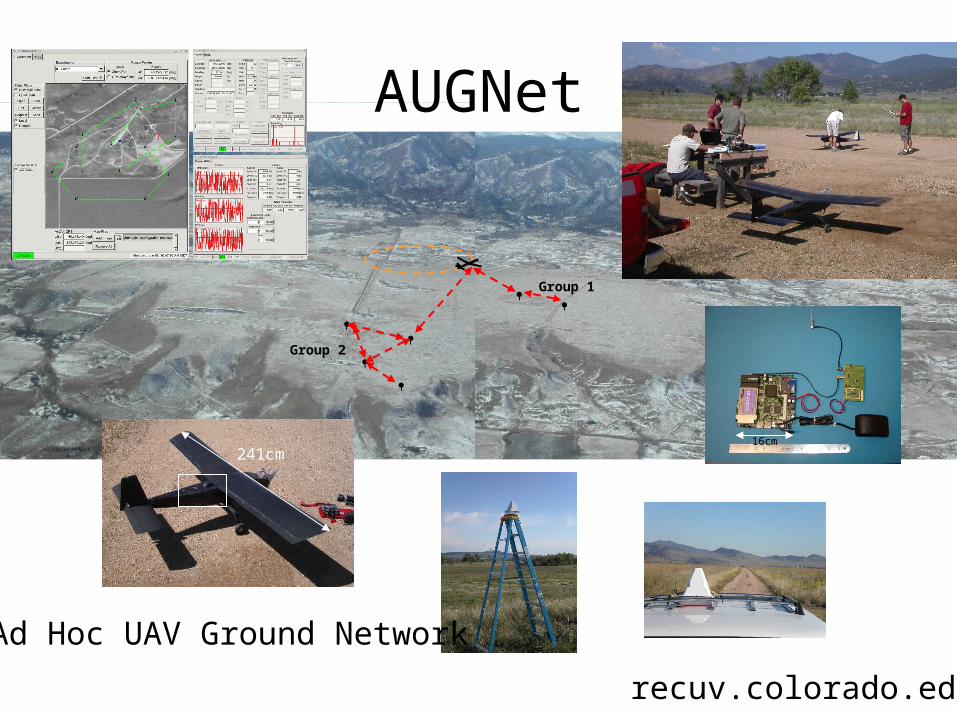
AUGNet
241cm
Ad Hoc UAV Ground Network
Group 1
Group 2
16cm
recuv.colorado.edu

AUGNET as Delay Tolerant / Challenged Network
• Plane bankingSimultaneous end-to-end paths might not exist
• Antenna configurationLinks might be very lossy
• Unmanned planesNodes might move at high speeds
• Links might have extremely long delays• Links might be intermittently up or
down

Research Goal
GS1
UAV1UAV3
UAV2
GS2
Using node mobility control to enhance
network performance
DirectRelayFerrying

Assumptions
• Controllable helper nodes
• Known communication demands
• Single link perspective
• Theoretical rather than implementation
x
yz
S R
λ

Direct Communication
)1(log2 SINRWR
d
KdS )(
KWTkB /0
)1
1(log2 dWRD
Shannon capacity law
Signal strength
Thermal noise (normalized)
Data rate
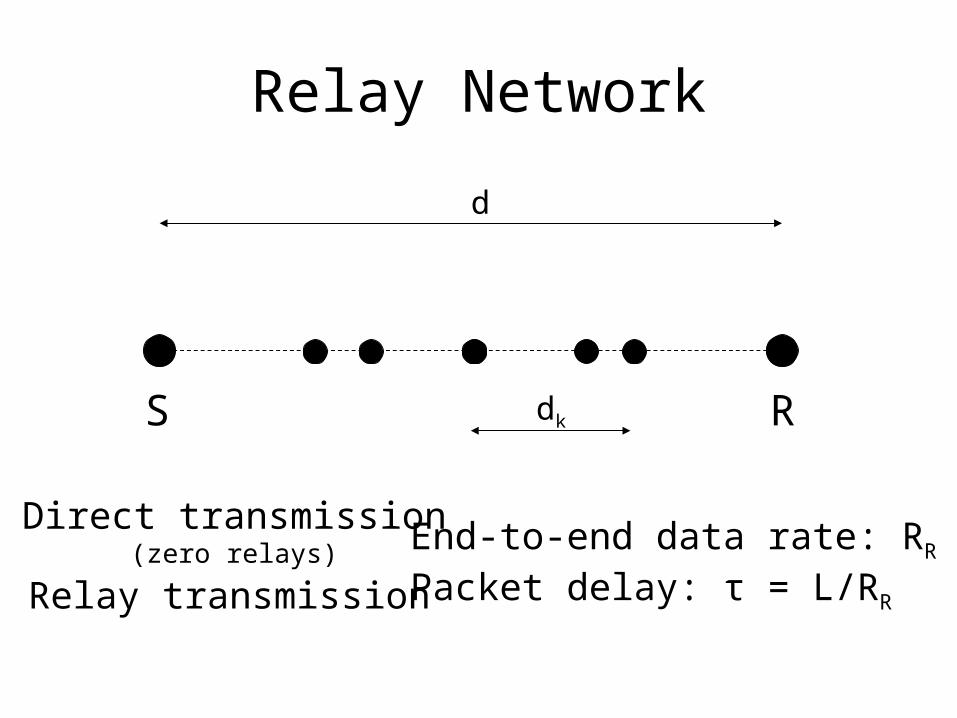
Relay Network
S R
d
dk
End-to-end data rate: RR
Packet delay: τ = L/RR
Direct transmission(zero relays)
Relay transmission

“Single Tx” Relay Modela.k.a., the noise-limited case
11
1
k
dR
kR DRS
1
)1(
kd
R
Lk
D
RS
S Rdk
t=0

“Parallel Tx” Relay Modela.k.a., the interference limited case > Optimal distance between transmissions?
),,(
,1min
1max
kdR
kR IRP
)1(log2NI
SI PP
PWR
iI iid
kP
)1(
1
)1(
1)
1(
S Rρ
t=0 t=0 t=0
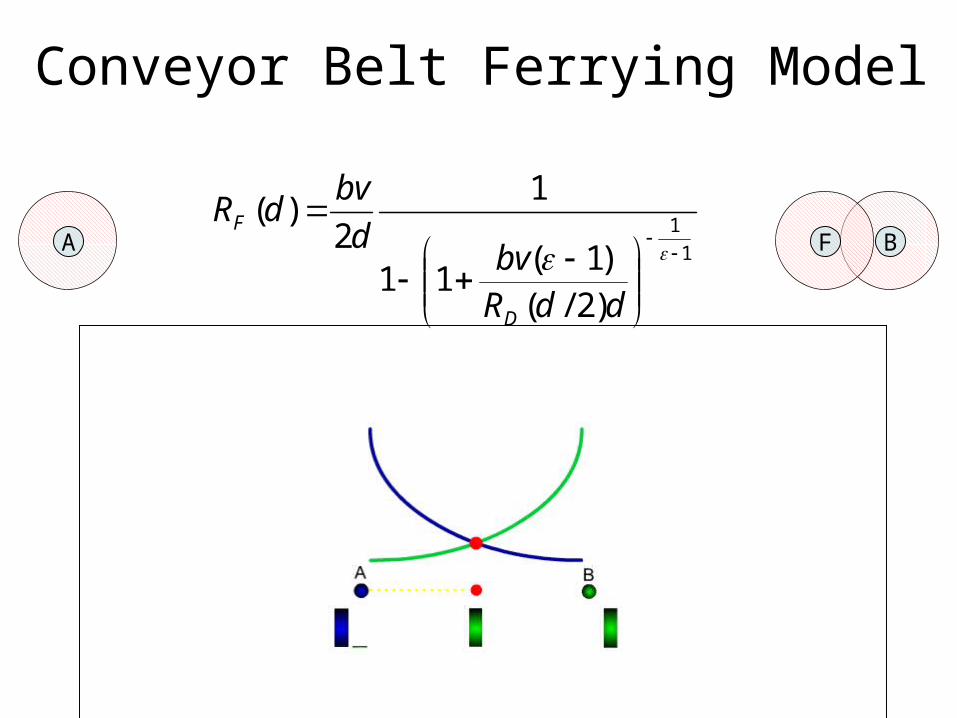
A BF
Conveyor Belt Ferrying Model
1
1
)2/()1(
11
1
2)(
ddRbv
d
bvdR
D
F

Optimizing “Single Tx”• Where is the trade-off?
dk vs. # of transmissions
• Optimal number of relays:
),( KCdkopt
1
K
dckopt
c
cc
1
)1ln(with

Optimizing “Parallel Tx”
• Where is the trade-off?– interference vs. # parallel transports
• Use Matlab!
k
ρ
R
link reuse factor

“Triple Play”
2km 4km 8km 16km
eps=5 PN=10-15 W

Distance—Rate Phase Plot

Delay—Rate Phase Plot

Delay—Rate Animation

Sensor Data Collection
Sparsely distributed sensors Limited radio range, power
Sensor-1
Sensor-2
Sensor-3
SMS-1
External Network
SMS-2
Gateway-1
SMS-3
Gateway-2CDMA
Multiple monitoring stations
Challenges:• No end-to-end connection• Intermittent connectivity • Sensors and SMS unknown

RTT 40ms, 15hrs sustained operation
Soekris SBC, embedded Gentoo Linux Atheros miniPCI, Madwifi-ng driver
Hardware Implementation
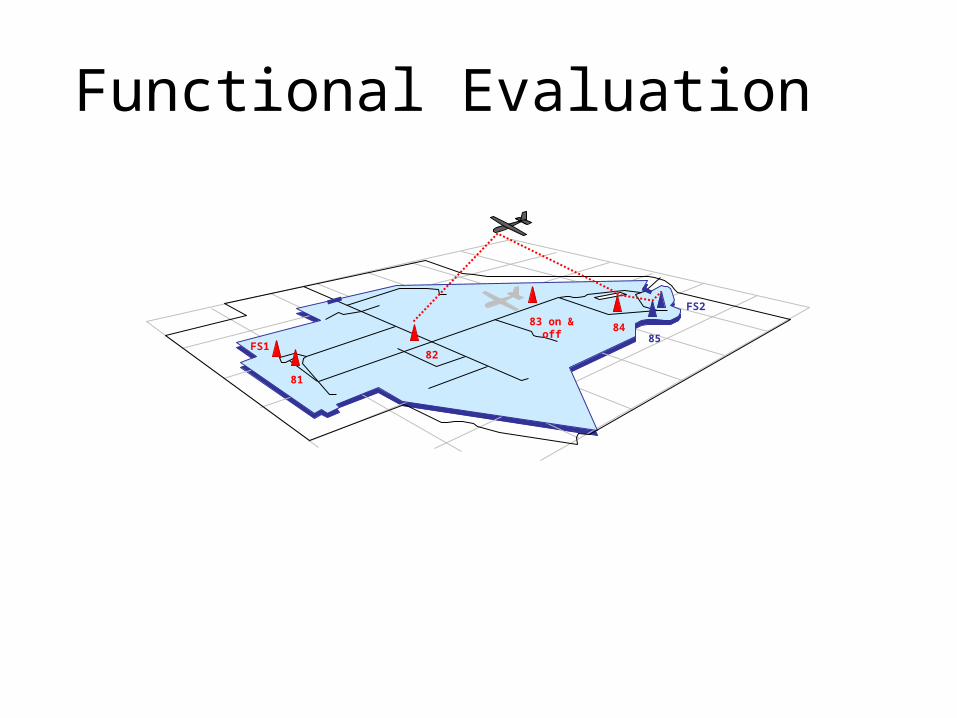
FS1
FS2
82
81
8584
83 on & off
Functional Evaluation

Functional Evaluation II

Next Steps
• Ferry route planning with Reinforcement Learning
• Multi UAV operations/hybrid with MAVs
• UAV Swarming• Phased array antenna• WiMAX trial

Research and Engineering Center forUnmanned Vehicles (RECUV)Daniel Henkel, [email protected]
recuv.colorado.edu







