

DIEM Dept. of Mechanical Eng.
Group of Robotics andArticular Biomechanics
Dir: Prof. V. Parenti Castelli
Speaker: Dr. Marco Carricato

Collaborations
GRAB has collaborations and agreements with :
• Universities :
Duisburg-Essen University (Germany)
Guanajuato University (Mexico)
Laval University (Canada) MIT (USA) Monastir University (Tunisia) Oxford University (Great
Britain) Paris 6 University (France) Scuola Superiore Sant’Anna
(Italy) …
• Research Centers:
CNR-ITIA (Italy) Fraunhofer Institute (Germany) INAIL Prosthetic Centre (Italy) INRIA – Sophia Antipolis (France) Jozef Stefan Institute (Slovenia) Rizzoli Orthopaedic Institute ( Italy) …

Collaborations
GRAB has collaborations and agreements with :
• Industry:
DUCATI LAMBORGHINI EMMEGI GROUP DVP CALZONI VARVEL HERA VARIAN RAINER …
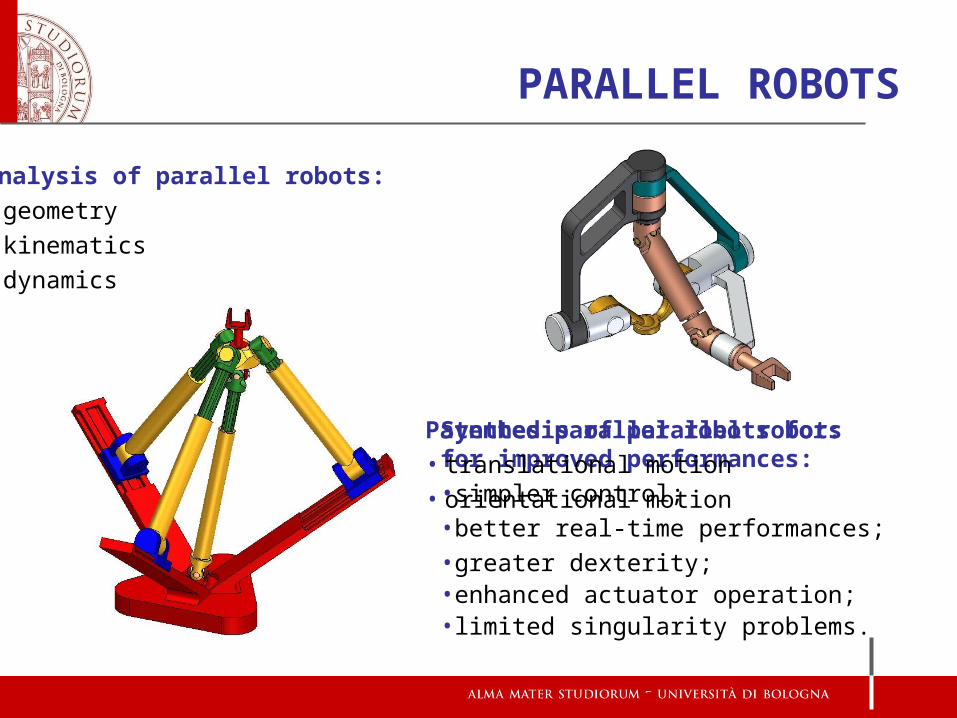
PARALLEL ROBOTS
Analysis of parallel robots:• geometry• kinematics• dynamics
Synthesis of parallel robotsfor improved performances:•simpler control;•better real-time performances;•greater dexterity;•enhanced actuator operation;•limited singularity problems.
Patented parallel robots for:• translational motion• orientational motion

CABLE ROBOTS
Collaboration: INRIA Sophia Antipolis, Équipe COPRIN (Dr: Jean-Pierre Merlet)
Cable-Driven Parallel Robots:• reduced manufacturing and
assembling costs;• ample workspace;• mechanical modularity.
Service Robotics for Assistance and Rehabilitation :• cost mechanical simplicity;• high degree of modularity;• adaptability to users needs and
environment.
Activity in Bologna:• Mechanical problems
(kinetostatic analysis, stability analysis, etc.)

HUMAN-MACHINEPHYSICAL INTERFACES (HMPI)
Design of novel HMPI kinematic architectures.Design of novel actuation systems for HMPI:• Based on Dielectric Elastomers
• Large deformations• Large force (power)-to-weight ratios• Low costs [ <0.5€/W vs. >3€/W of traditional
EM drives ];• Large shock-insensitivity;
• Different actuators geometries have been studied and optimized
Collaboration: SCUOLA SUPERIORE SANT’ANNA (Pisa, Italy)
V = 0kV
0kV 6kV

COMPLIANT MECHANISMSand SOFT MATERIALS
Collaboration: Group of Mechatronic Design, UNIBO (Prof. G. Vassura)
Finger prototype
Design of compliant fingers (robotic grippers / orthesis)
• Reduction of assembly costs• Monolithic prototypes
Design soft covers similar to biological skin:• Hardness similar to human thumb• Better friction properties• Reduced thickness
→ easier to accommodate mechanical parts

ROBOTIC HANDS
Collaboration: Group of Mechatronic Design, DIEM/DEISMechanical design of robotic
hands• Endoskeletal structure
articulated by means of non conventional joints
• sliding • compliant
• Actuated by means of tendons• Surface compliance through
a purposely designed soft cover• Systematic parts integration
• Reduction of assembly complexity
• Reduction of weight and cost of the overall hand system
• increased "affordability."
UBH-IV: DIEM/DEIS

– Design methodology focused on the patient
– Design of upper limb Prostheses and Exoskeletons
– Definition of control strategies– Bench tests– Clinical tests
REHABILITATION ANDASSISTIVE ROBOTICS

HUMAN JOINT MODELLING
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.02
-0.01
0
0.01
0.02
0.03
0.04
Flexion (rad)
(
rad
)
Ab/Adduction
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.1
0
0.1
0.2
0.3
0.4
Flexion (rad)
(r
ad)
Intra/Extra Rotation
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-15
-10
-5
0
5
Flexion (rad)
x (m
m)
Position components
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 220
22
24
Flexion (rad)
y (m
m)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-8
-6
-4
-2
0
Flexion (rad)
z (m
m)
Experimental analysis of human joints:• Articular surfaces• Passive articular structures• Natural motion
Knee and ankle models:• Kinematic models based on parallel
mechanisms• Static models• Different models for different
applications• High accuracy

PROSTHESES
Design of innovative medical devices:
• Internal prostheses• External prostheses• Orthoses and Exoskeletons
Collaborations: Rizzoli Orthopaedic Institute, Smith & Nephew, Hit Medica
Advantages:• Natural motion reproduction• Natural constraints of the joint• Mechanically simple
Patents and prototypes:• 2 international patents covering the
basic ideas (that can be applied to several human joints) and 4 prosthetic solutions for the knee
• 5 prototypes of total knee replacement

– Finite Element Modeling of machine components
– Lumped Parameters Modeling of mechanisms
– Flexible Multibody Systems– Experimental measurements of
vibrations– Experimental Modal Analysis
(EMA)– Operational Modal Analysis (OMA)– Signal Processing– Model Validation
VIBRATIONS of MACHINES

THANK YOU VERY MUCH!







