

Small Satellite Technologies for Drag-free Control and Drag force
RecoveryAnh N. Nguyen ([email protected])
John W. Conklin ([email protected])
31ST ANNUAL AIAA/USU CONFERENCE ON SMALL SATELLITES
10-Aug-2017

Why do I care about drag-free spacecraft?
2

3
Navigation

4
GRACE Gravity Field Maps
Earth Science

5
May Jun Jul Aug
Sep Oct Nov Dec
Jan Feb Mar Apr
2004 Water height (from average) in cm
-20 -15 -10 -5 0 5 10 15 20

6
Fundamental Physics
GP-B: Geodetic & Frame dragging effects

7
Astrophysics
Gravitational Waves

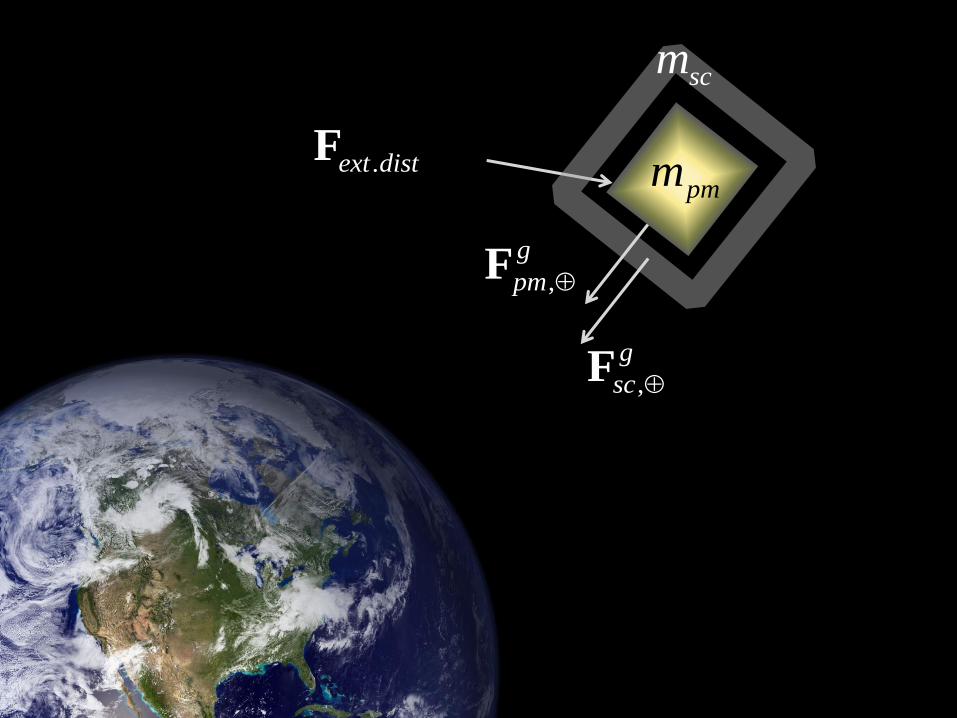
What is a Drag-free Spacecraft?
.ext distF
scm
,
g
sc F
,
g
pm F
pmm

Newton’s Law of Gravitation
Proof mass (PM)
Earth
pmm
,
g
pmF
m
r
, /
g
pm pm pmm F r
,
g
pm F
,
g
i j F Force of gravity on from i j
10

.ext distFscm
,
g
sc F
,
g
pm F
pmm
Presence of Disturbance Forces
,
,
3
3
g pm pm
pm c a pm pm
g pm pmpm c a
pm
pm pm pm
pm pm
c apm pm
pm pm pm
m
m m m
GM
r m m
F F F r
F F Fr
F Fr r
Proof-mass (PM) EOM
, .
, .
.
3 2
g sc
sc c ext sc scg scsc c ext
sc
sc sc scsc
c extsc sc
sc sc sc
m
m m m
GM
r m m
F F F r
F F Fr
F Fr r
Spacecraft (SC) EOM
/
/ /
/ / /
1
pm sc
pm sc
pm sc pm sc
z r
r r
z r r r
Measurement
11
, /3
/
g
i ii
i
GM mr
r
F
Gravitational Force
pm
residualF
, sc pm
c cF F
Control Forces
Residual Forces
sc
controlF
pm
residualF
pm
controlF

Governing Equation of Motion
/ 1pm sc pm sc r r r
Measurement
Substitute (1) and (2) into (3)
./ 3 3
.
3 3
4
pm pm sc
c a c extpm sc pm sc
pm pm pm sc sc sc
pm sc pm
c c ext apm sc
pm sc pm sc sc pm
GM GM
r m m r m m
GM GM
r r m m m m
F F F Fr r r
F F F Fr r
./ 5
pm sc pm
c c ext residualpm sc
pm sc sc pmm m m m
F F F Fr
When , pm scr r
12

Drag-free Design Concept
• Gravitational Reference Sensor (GRS)
• Inner free-floating proof mass (PM)
• Outer electrode housing
• Outer SC flies in formation with PM using propulsion system
• Performance measured by the amount of residual acceleration noise on PM, pm
residualF
./
/ . .
5
6
pm sc sc pm
c c ext residualpm sc
pm sc sc pm
pm pm sc sc
pm sc residual control control ext dist
m m m m
F F F Fr
r F F F F
13

Category ApplicationPerformance
(ms-2Hz-1/2), frequency (Hz)Metrology
(mHz-1/2)
Navigation
Autonomous, fuel-efficient orbit maintenance
≤10-10, near zero frequency
≤10 absolute
Precision real-time on-boardnavigation
≤10-10, near zero frequency
≤10 absolute
Earth Science
Aeronomy ≤10-10, 10-2 to 1 Hz 1 absolute
Current Earth Geodesy[2] 10-10, 10-2 to 1 Hz 10-5 differential
Future Earth Geodesy[3] ≤10-10, 10-2 to 1 Hz ≤10-9 differential
Fundamental Physics
Equivalence Principle Tests[4] ≤10-10, 10-2 to 1 Hz ≤10-10 differential
Tests of General Relativity≤10-10, near zero
frequency≤1 absolute
Astrophysics Gravitational Waves[5] 3×10-15, 10-4 to 1 Hz ≤10-11 differential
Performance
14
[2] Tapley, B. D., Bettadpur, S., Watkins, M., & Reigber, C. (2004). Geophysical Research Letters, 31(9)., [3] Barney, R. D. (2010). DRAFT Science Instruments, Observatories, and Sensor Systems Roadmap, Technology Area 08., [4] Touboul, P., Rodrigues, M., Métris, G., & Tatry, B. (2001). Comptes Rendus de l'Académie des Sciences- Series IV- Physics, 2(9), 1271-1286., [5] Danzmann, K., & Rüdiger, A. (2003). LISA technology—concept, status, prospects. Classical and Quantum Gravity, 20(10), S1.

1. PM centered and shielded in housing.
Electrostatic Accelerometer
2. External disturbance
force acts on SC
3. Suspension compensates disturbance
4. PM remains in centered
Limited by suspension force noise and acceleration measurement noise
/pm scrsmall pm
residual Fsmall
pm sc
control control F F0
. .
. .
sc
ext dist
sc pm
ext dist control
F
F F
15

‘Accelerometer’ Drag-free control
3. Thruster minimizes suspension force
required to compensate disturbance.
2. Disturbance force acts on SC
4. PM remains in geodesic
1. PM centered and shielded in housing,
following pure geodesic 16
Propulsion minimizes suspension force, which is used as the error signal
/pm scrsmall pm
residual Fsmall
pm
control F . .
smallsc sc
control ext dist F F
small
No direct scientific data, need external measurements

‘True’ Drag-free control
3. Thruster system compensates disturbances
1. PM centered and shielded in housing,
following pure geodesic
2. Disturbance force acts on SC
4. PM remains in geodesic
undisturbed17

18
Gravity Recovery and Climate Experiment (GRACE)487 kg (each), 2002
Gravity Probe-B (GP-B)3,100 kg, 2004
Gravity Field and Steady-State Ocean Circulation Explorer (GOCE)
1,077 kg, 2009
Disturbance Compensation System (DISCOS) [8]
3,100 kg, 1972
LISA Pathfinder (LPF)[9] 1,910 kg,
2014

LISA
Spacecraft 1
Spacecraft 2 Spacecraft 3
Laser Inteferometer Space Antenna (LISA) [10]
19

Category ApplicationPerformance
(ms-2Hz-1/2), frequency (Hz)
Metrology(mHz-1/2)
Navigation
Autonomous, fuel-efficient orbit maintenance
≤10-10, near zero frequency
≤10 absolute
Precision real-time on-board navigation
≤10-10, near zero frequency
≤10 absolute
Earth Science
Aeronomy ≤10-10, 10-2 to 1 Hz 1 absolute
Current Earth Geodesy[2] 10-10, 10-2 to 1 Hz 10-5 differential
Future Earth Geodesy[3] ≤10-10, 10-2 to 1 Hz ≤10-9 differential
Fundamental Physics
Equivalence PrincipleTests[4] ≤10-10, 10-2 to 1 Hz
≤10-10
differential
Tests of General Relativity≤10-10, near zero
frequency≤1 absolute
Astrophysics Gravitational Waves[5] 3×10-15, 10-4 to 1 Hz≤10-11
differential
20

Design 1: Single Thruster Drag-free
3. Control system fires thruster and orients SC
in direction of disturbance
1. PM centered and shielded in housing,
following pure geodesic
2. Disturbance force acts on SC
4. PM remains in geodesic
21

I. Single Thruster Drag-free
3. Control system fires thruster and orients SC
in direction of disturbance
1. PM centered and shielded in housing,
following pure geodesic
2. Disturbance force acts on SC
4. PM remains in geodesic
22
Single thruster and 3-DOF ADACS required to control position and orientation of the SC. Most fuel-efficient drag-free
/pm scrsmall pm
residual Fsmall
pm
control F0
. .
sc sc
control ext dist F F
small
No direct scientific data, need external measurements

Single Thruster Satellite Design
DRAG-FREE CUBESAT[10]
Orbit: Circular Polar
Altitude: 400 km
Period: 5554 s
SC Mass: 4 kg
SC Dimensions: 10 × 10 × 34 cm
Housing Dimensions:
50 mm cavity
TM Mass: 171 g
TM Radius: 12.5 mm
Min. Gap: 25 mm
ˆ x
ˆ y ˆ z
dF
23

Caging System[10]Test Mass with Differential Optical Sensor (DOSS)[10]
ion Electrospray Propulsion System (iEPS)[11]
Zero-G Test Flight
Instrumentation
COTS Attitude Determination and Control System (ADACS)[13]
VACCO Micro Propulsion System [12]
[10] Conklin, J., et. al. (2012). The Drag-free CubeSat., [11] Martel, F., Perna, L., & Lozano, P. (2012). Miniature Ion Electrospray Thrusters and Performance Test on CubeSats., [12] Vacco Space Products, [13] Blue Canyon Technologies, XACT
24

Performance ˆ x
ˆ y ˆ z
dF
RMS Errors (µN)
Fdx 0.73
Fdy 0.034
Fdz 0.0037
Acceleration measurement error(m/s2Hz-1/2) @10mHz
x ~10-11
y ~10-11
z ~10-1225
Residual Meas. Error (x)
m/s
2H
z-1/2
Fdx
(µN
)Fd
y(µ
N)
Fdz
(µN
)
Estimated and True Disturbance Forces

II. Drift-mode Accelerometer
1. PM centered and shielded in
housing
2. External disturbance force
acts on SC
4. Suspension OFF for 5 sec and meas. taken
before suspension turns ON
3. Suspension turned ON for 1 sec,
to compensate disturbances
Acceleration noise performance close to that of drag-free without the need for spacecraft propulsion
/
pm
pm sc residualr Fsmall
pm sc
control control F F0
. .
/ . .
/ . .
Actuation ON:
Actuation OFF:
sc
ext dist
pm sc
pm sc control ext dist
sc
pm sc ext dist
F
r F F
r F
26

27
Suspension ON
ImpulseSuspension OFF
Drift
Suspension ON
Impulse
12
14 2
5/25/2
1.0 10 m1 1.8 10 ms
5 s
pm
r ia
kickT
Expected Acceleration Measurement Noise[20]

Orbit Circular Polar
Altitude 400 km
Period 5554 s
SC Mass 250 kg
SC Radius 0.7 m
SC Length 1.4 m
28
SCPM
dF
cF
cT
xPM Mass 0.24 kg
PM/Housing Gap 1 mm
PM length 3 cm
Concept Spacecraft & PM Design
SmallSat GRACE II(GRACE shown)

Performance
29
10
12
12
1.1 10
5.6 10
4.3 10
ms-2Hz-1/2 at 10 HzMode
EA
DMA
c-DMA
DMA True and Estimated Acceleration ASDs
m-2
Hz-1
/2 Estimated Error
Bulk

In Summary
30

Technology Thruster?Suspension
System?Laser Inter-ferrometer?
Residual Acc. Noise(ms-2Hz-1/2)
Electrostatic Accelerometer
No Yes No 2×10-11GRACE[2],
2002
‘Accelerometer’ drag-free control
Yes (×6) No No4×10-11
~10-12
GP-B[6], 2004
GOCE[7], 2009
‘True’ drag-free control
Yes (×6) Yes
No
Yes
Yes
~10-10
~10-14
~10-15
DISCOS[8],
1972
LPF[9], 2014
LISA[5], 2034
Single-thruster drag-free control
Yes (×1) No No ~10-11
Drift-mode control
No Yes Yes ~10-12
31

32
Residual Acceleration
~10-12 ms-2Hz-1/2
GRS

What’s next?

34
Mars Gravity Field Maps

35
Europa
Near Earth Objects
??

References[1] Lambeck, K. (1988). Geophysical geodesy (p. 718). Oxford: Clarendon
[2] Tapley, B. D., Bettadpur, S., Watkins, M., & Reigber, C. (2004). The gravity recovery and climate experiment: Mission overview and early results.Geophysical Research Letters, 31(9).
[3] Barney, R. D. (2010). DRAFT Science Instruments, Observatories, and Sensor Systems Roadmap, Technology Area 08.
[4] Touboul, P., Rodrigues, M., Métris, G., & Tatry, B. (2001). MICROSCOPE, testing the equivalence principle in space. Comptes Rendus de l'Académie des Sciences-Series IV-Physics, 2(9), 1271-1286.
[5] Danzmann, K., & Rüdiger, A. (2003). LISA technology—concept, status, prospects. Classical and Quantum Gravity, 20(10), S1
[6] Everitt, C. W. F., DeBra, D. B., Parkinson, B. W., Turneaure, J. P., Conklin, J. W., Heifetz, M. I., ... & Wang, S. (2011). Gravity Probe B: Final results of a space experiment to test general relativity. Physical Review Letters, 106(22), 221101.
[7] Canuto, E. (2008). Drag-free and attitude control for the GOCE satellite.Automatica, 44(7), 1766-1780.
[8] Eisner, A., & Yuhasz, R. (1973). A Flight Evaluation of the DISCOS System on the TRIAD Satellite. JHU/APL TG-1216, April.
[9] Anza, S., Armano, M., Balaguer, E., Benedetti, M., Boatella, C., Bosetti, P., ... & Sandford, M. (2005). The LTP experiment on the LISA Pathfinder mission.Classical and Quantum Gravity, 22(10), S125.
[10] Conklin, J., Balakrishnan, K., Buchman, S., Byer, R., Cutler, G., DeBra, D., ... & Altwaijry, H. (2012). The Drag-free CubeSat.
[11] Martel, F., Perna, L., & Lozano, P. (2012). Miniature Ion Electrospray Thrusters and Performance Test on CubeSats.
[12] Vacco Space Products
[13] Blue Canyon Technologies, XACT
[14] Picone, J. M., Hedin, A. E., Drob, D. P., & Aikin, A. C. (2002). NRLMSISE‐00 empirical model of the atmosphere: Statistical comparisons and scientific issues. Journal of Geophysical Research: Space Physics (1978–2012),107(A12), SIA-15.
[15] Wang, D. Y., McLandress, C., Fleming, E. L., Ward, W. E., Solheim, B., & Shepherd, G. G. (1997). Empirical model of 90–120 km horizontal winds from wind‐imaging interferometer green line measurements in 1992–1993. Journal of Geophysical Research: Atmospheres (1984–2012), 102(D6), 6729-6745.
36

[16] Musen, P. (1960). The influence of the solar radiation pressure on the motion of an artificial satellite. Journal of Geophysical Research, 65(5), 1391-1396.[17] Bhanderi, D. D. (2005). Spacecraft Attitude Determination with Earth Albedo Corrected Sun Sensor Measurements. Department of Control Engineering, Aalborg university.[18] Texas Instruments TMS320C6748 Fixed/Floating-point Digital Signal Processor[19] . A. N. Nguyen, J. W. Conklin, “Three-axis drag-free control and drag force recovery of a single thruster small satellite”. AIAA Journal and Spacecraft and Rockets, submitter, (2014). [20] Conklin, J. W. (2014). Drift mode accelerometry for spaceborne gravity measurements. arXiv preprint arXiv:1402.6772.[21] Ball press release http://www.ballaerospace.com/page.jsp?page=30&id=297[22] Neeck, S. P., & Volz, S. M. (2013, October). NASA Earth science missions. InSPIE Remote Sensing (pp. 88890C-88890C). International Society for Optics and Photonics.[23] R. Shelley, A. Chilton, T. Olatunde, G. Ciani, G. Mueller, J. W. Conklin, “The UF Torsion Pendulum, a LISA Technology Testbed: Design and Initial Results”, Proceedings of the 10th International LISA Symposium, Journal of Physics: Conference Series, submitted, (2015).[24] Gerardi, D., Allen, G., Conklin, J. W., Sun, K. X., DeBra, D., Buchman, S., ... & Johann, U. (2009). Advanced drag-free concepts for future space-based interferometers: acceleration noise performance. arXiv preprint arXiv:0910.0758.[25] Schumaker, B. L. (2003). Disturbance reduction requirements for LISA.Classical and Quantum Gravity, 20(10), S239.[26] Chilton, A., Shelley, R., Olatunde, T., Ciani, G., Conklin, J. W., & Mueller, G. (2015). The UF Torsion Pendulum, a LISA Technology Testbed: Sensing System and Initial Results. In Journal of Physics: Conference Series (Vol. 610, No. 1, p. 012038). IOP Publishing.[27] Wang, Q. L., Yeh, H. C., Zhou, Z. B., & Luo, J. (2009). Improving the sensitivity of a torsion pendulum by using an optical spring method. Physical Review A, 80(4), 043811.
References
37






