

Johan Andreasson, Division of Vehicle Dynamics, KTH Driving Dynamics
Driving Dynamics Driving Dynamics ModellingModellingwith with ModelicaModelica
Johan Andreasson, Division of Vehicle DynamicsJohan Andreasson, Division of Vehicle DynamicsRoyal Royal InstituteInstitute of Technology, Swedenof Technology, Sweden
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
OutlineOutline
• Aim with the Car.mo library• From the top to the bottom!• Library contents• Examples• Related libraries• Future improvments
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
AimAim with the with the Car.moCar.mo librarylibrary
• Driving Dynamics evaluation– Critical maneouvres– Lateral performance – Longitudinal performance– Comfort– Etc.

Johan Andreasson, Division of Vehicle Dynamics, KTH Driving Dynamics
From the From the toptop to the to the bottombottom!!
Focus on chassisFocus on chassis

Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
A A carcar modelmodel
driver
power train
chassis trailer
environment
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
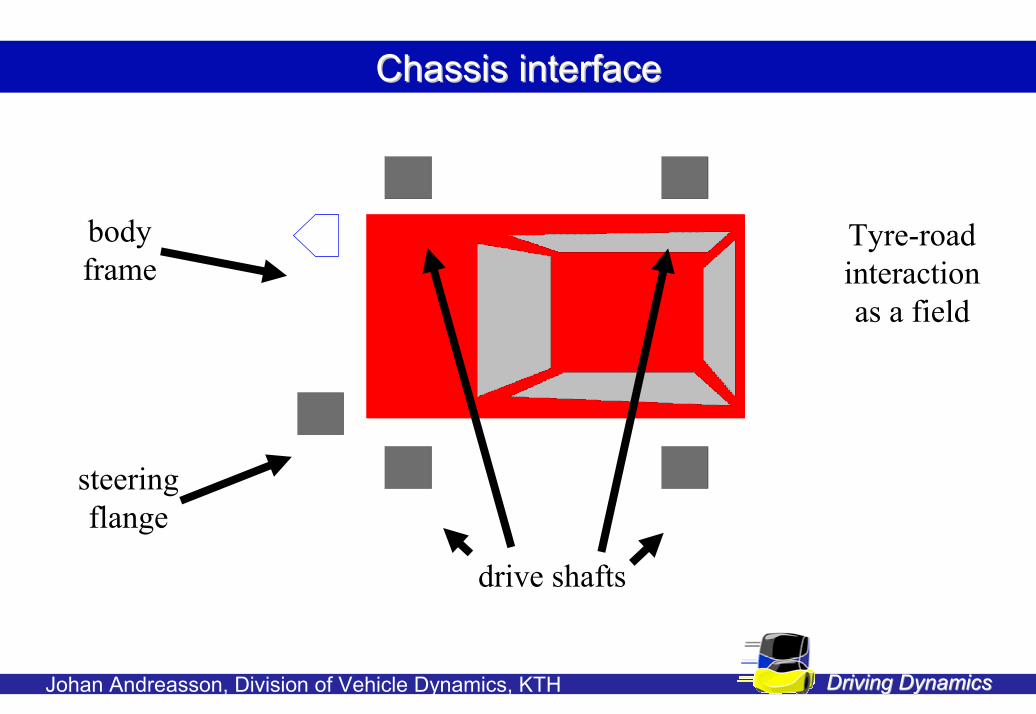
Chassis interfaceChassis interface
steeringflange
bodyframe
drive shafts
Tyre-roadinteraction as a field

Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
Chassis Chassis modelmodel
flange_SW
BGR
flange_1 flange_3
ground
xy
whe
el_2
wheel_1
wheel_3
whe
el_4
freeMotion
frontSuspension
left
MacPherson
rearSuspension
left
TwistBeam
front suspension
rear suspension
body
wheels
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
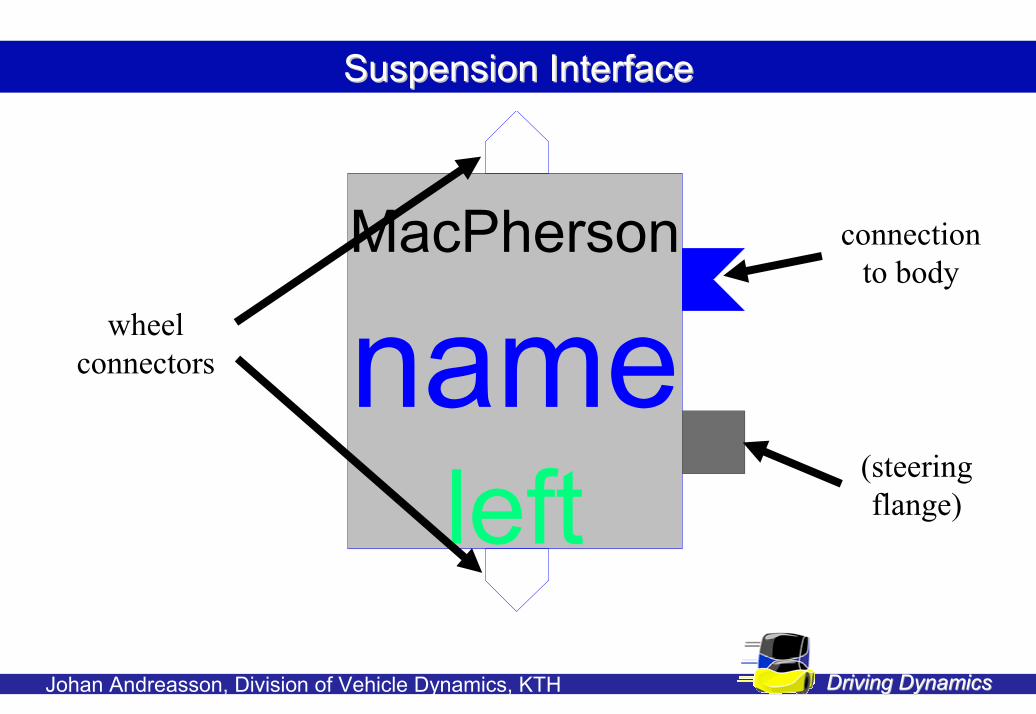
Suspension InterfaceSuspension Interface
nameleft
MacPherson connectionto body
(steeringflange)
wheelconnectors

Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
Suspension Suspension modelmodel (MacPherson)(MacPherson)
frame_U
_1
fram
e_U
_2
frame_C
L
R
flange_SW
L
f_s=f(s)f_d=f(der(s))
forceTable_1f_s=f(s)
f_d=f(der(s))
forceTableA
f_s=f(s)f_d=f(der(s))
forceTable_2
datasuspensionparameters
anti-roll linkage
MacPherson linkages
steering
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
frame_U
_1
fram
e_U
_2
frame_C
A
AL
f_s=f(s)f _d=f (der(s))
forceTable_1
f _s=f (s)f _d=f (der(s))
forceTable_2
f _s=f (s)f _d=f (der(s))
f orceTableA
data
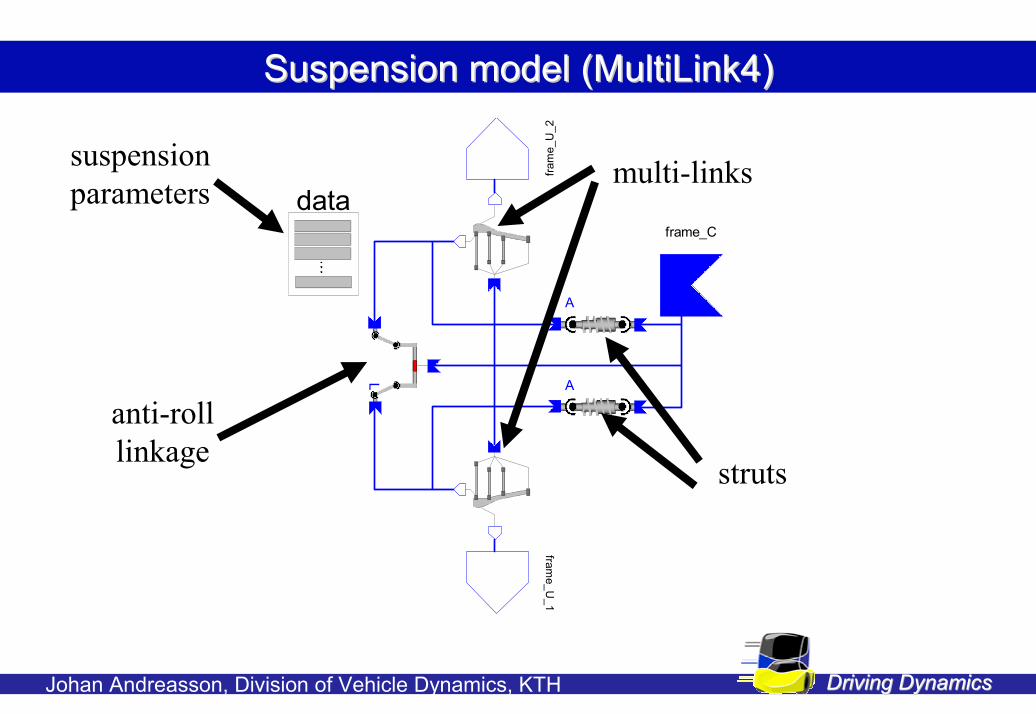
Suspension Suspension modelmodel (MultiLink4)(MultiLink4)
suspensionparameters
anti-roll linkage
multi-links
struts
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
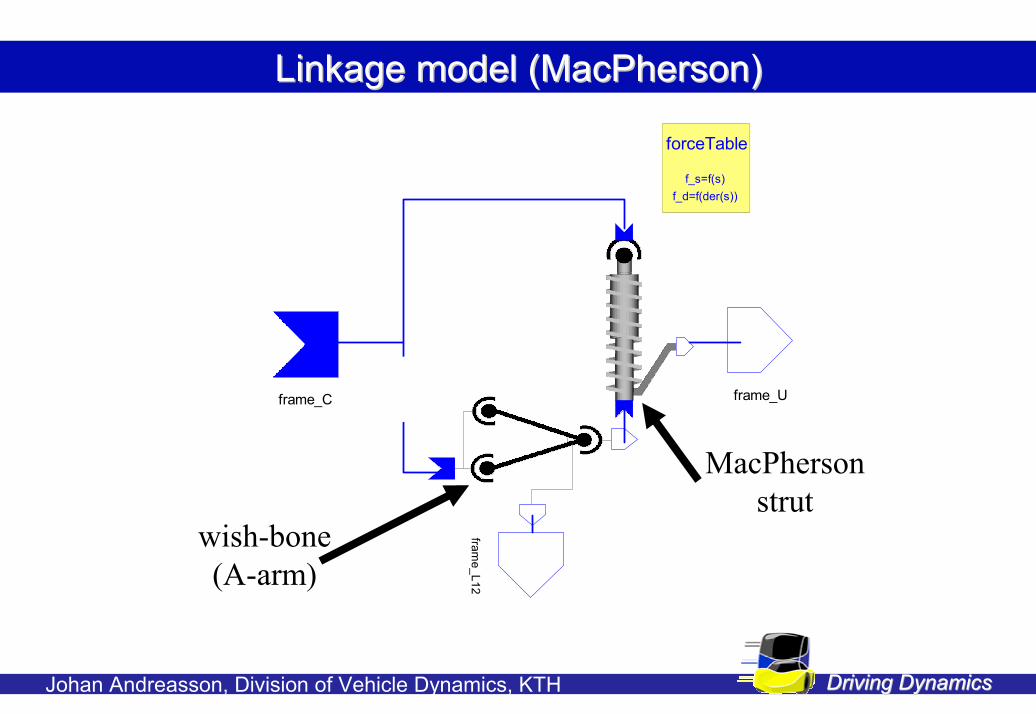
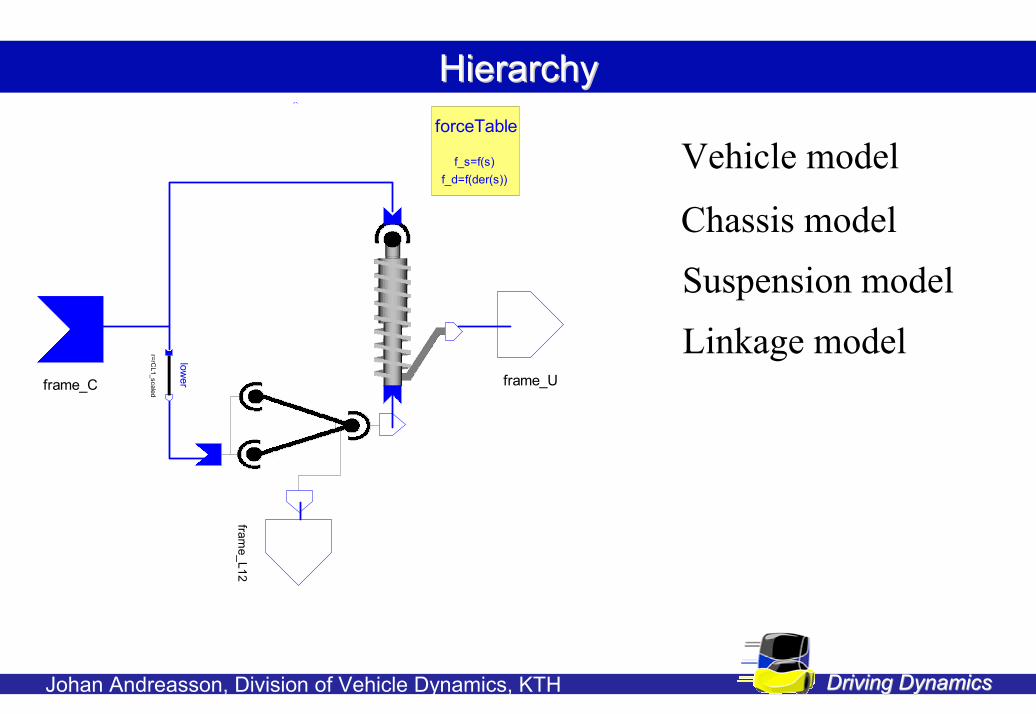
LinkageLinkage modelmodel (MacPherson)(MacPherson)
frame_C frame_U
frame_L12
f_s=f(s)f_d=f(der(s))
forceTable
r=rCL1_scaled
lower
wish-bone(A-arm)
MacPherson strut
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
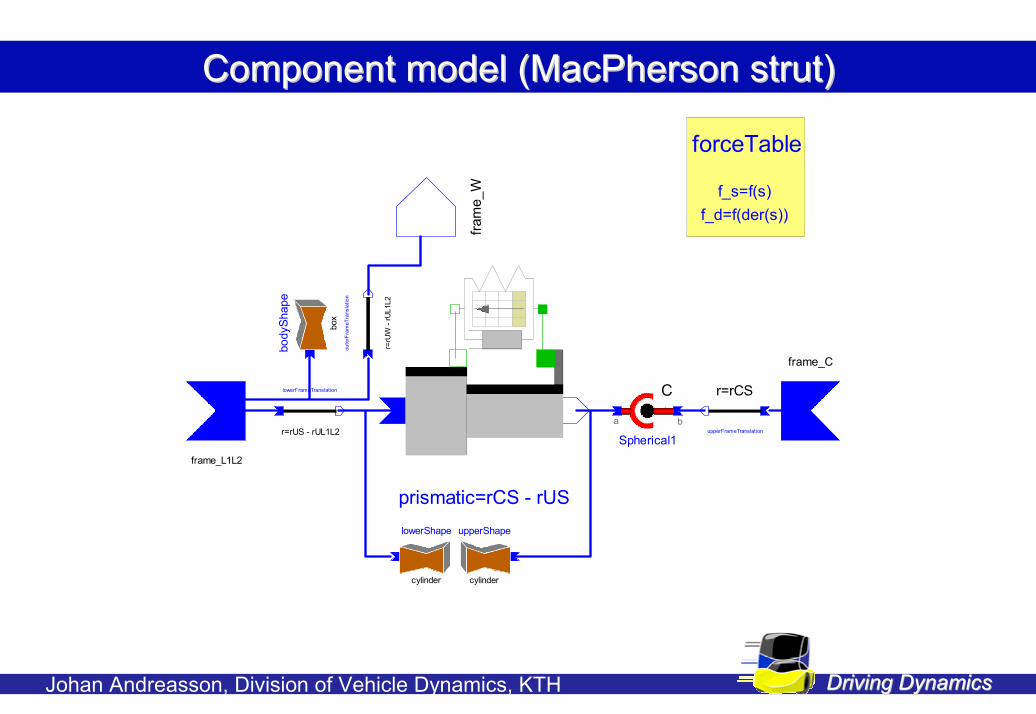
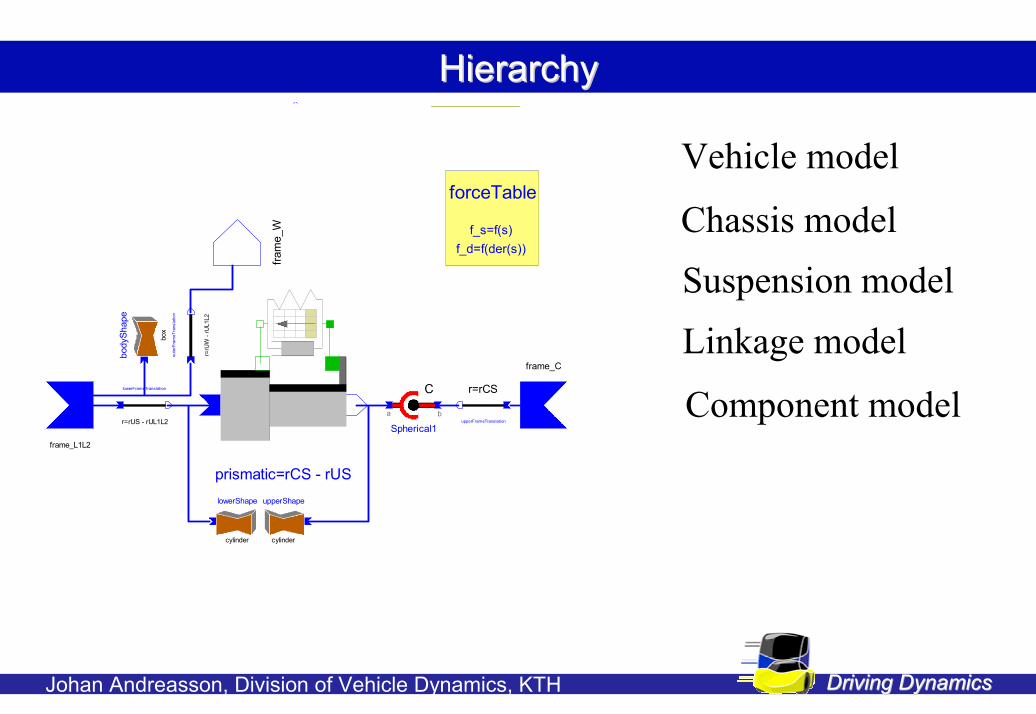
ComponentComponent modelmodel (MacPherson strut)(MacPherson strut)
frame_L1L2
frame_C
r=rUS - rUL1L2
lowerFrameTranslation
fram
e_W
prismatic=rCS - rUSlowerShape
cylinder
upperShape
cylinder
body
Shap
e
box
a b
C
Spherical1
r=rU
W -
rUL1
L2
oute
rFra
meT
rans
latio
n
f_s=f(s)f_d=f(der(s))
forceTable
r=rCS
upperFrameTranslation
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
L
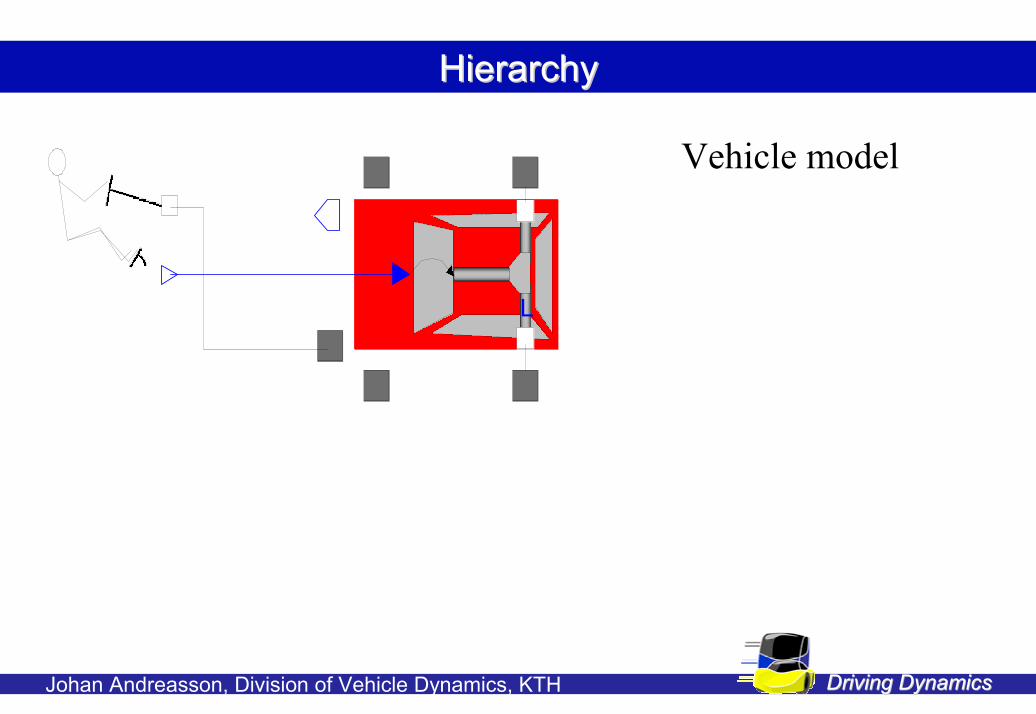
Vehicle model
HierarchyHierarchy

Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
L
Vehicle model
HierarchyHierarchy
flange_SW
BGR
flange_1 flange_3
ground
xy
whe
el_2
wheel_1
wheel_3
whe
el_4
freeMotion
frontSuspension
left
MacPherson
rearSuspension
left
TwistBeam
Chassis model

Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
L
Vehicle model
HierarchyHierarchy
flange_SW
BGR
flange_1 flange_3
ground
xy
whe
el_2
wheel_1
wheel_3
whe
el_4
freeMotion
frontSuspension
left
MacPherson
rearSuspension
left
TwistBeam
Chassis modelSuspension model
frame_U
_1
fram
e_U
_2
frame_C
L
R
flange_SW
L
f_s=f(s)f_d=f(der(s))
forceTable_1f_s=f(s)
f_d=f(der(s))
forceTableA
f_s=f(s)f_d=f(der(s))
forceTable_2
data
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
L
Vehicle model
HierarchyHierarchy
flange_SW
BGR
flange_1 flange_3
ground
xy
whe
el_2
wheel_1
wheel_3
whe
el_4
freeMotion
frontSuspension
left
MacPherson
rearSuspension
left
TwistBeam
Chassis modelSuspension model
frame_U
_1
fram
e_U
_2
frame_C
L
R
flange_SW
L
f_s=f(s)f_d=f(der(s))
forceTable_1f_s=f(s)
f_d=f(der(s))
forceTableA
f_s=f(s)f_d=f(der(s))
forceTable_2
data
Linkage modelframe_C frame_U
frame_L12
f_s=f(s)f_d=f(der(s))
forceTable
r=rCL1_scaled
lower
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
L
Vehicle model
HierarchyHierarchy
flange_SW
BGR
flange_1 flange_3
ground
xy
whe
el_2
wheel_1
wheel_3
whe
el_4
freeMotion
frontSuspension
left
MacPherson
rearSuspension
left
TwistBeam
Chassis modelSuspension model
frame_U
_1
fram
e_U
_2
frame_C
L
R
flange_SW
L
f_s=f(s)f_d=f(der(s))
forceTable_1f_s=f(s)
f_d=f(der(s))
forceTableA
f_s=f(s)f_d=f(der(s))
forceTable_2
data
Linkage modelframe_C frame_U
frame_L12
f_s=f(s)f_d=f(der(s))
forceTable
r=rCL1_scaled
lower
frame_L1L2
frame_C
r=rUS - rUL1L2
lowerFrameTranslation
fram
e_W
prismatic=rCS - rUSlowerShape
cylinder
upperShape
cylinder
body
Shap
e
box
a b
C
Spherical1
r=rU
W -
rUL1
L2
oute
rFra
meT
rans
latio
n
f_s=f(s)f_d=f(der(s))
forceTable
r=rCS
upperFrameTranslationComponent model
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving Dynamics
LibraryLibrary contentscontents
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
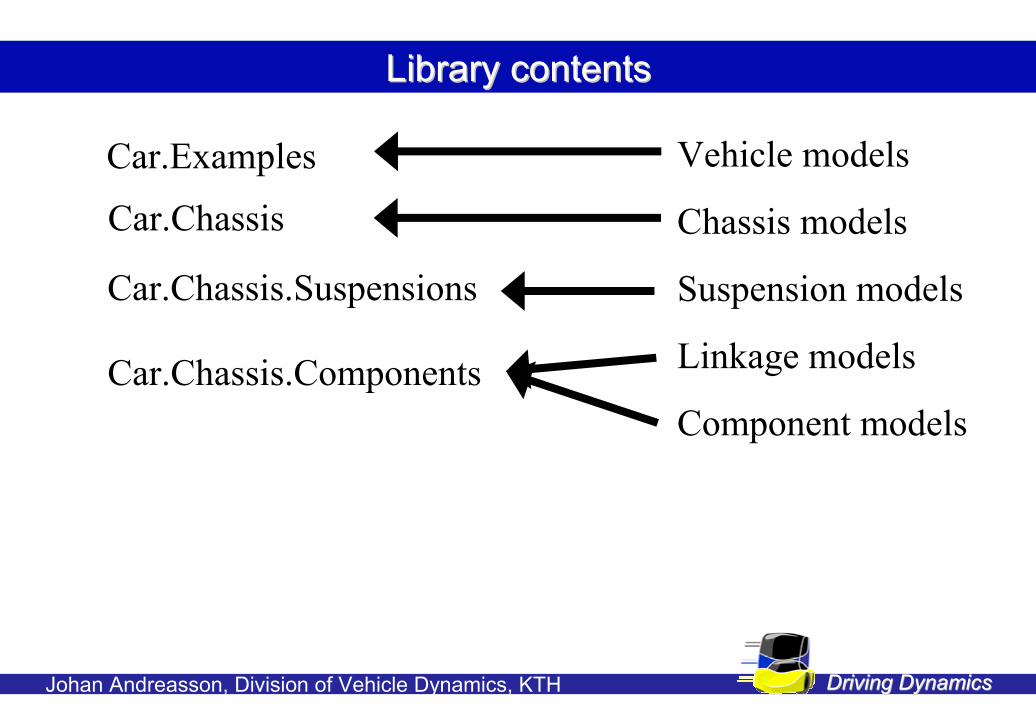
LibraryLibrary contentscontents
Vehicle models
Chassis models
Suspension models
Linkage models
Component models
Car.Examples
Car.Chassis
Car.Chassis.Suspensions
Car.Chassis.Components
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving Dynamics
UsageUsage
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
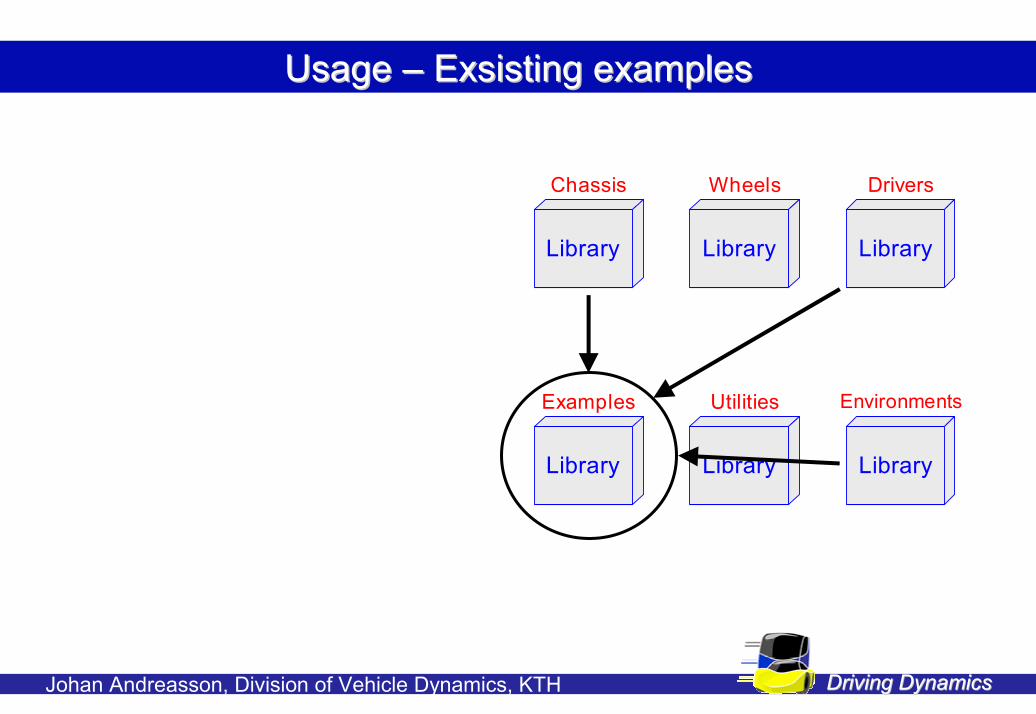
UsageUsage –– ExsistingExsisting examplesexamples
Library
Chassis
Library
Wheels
Library
Drivers
Library
Examples
Library
Utilities
Library
Environments
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
Example
MyCar
Model
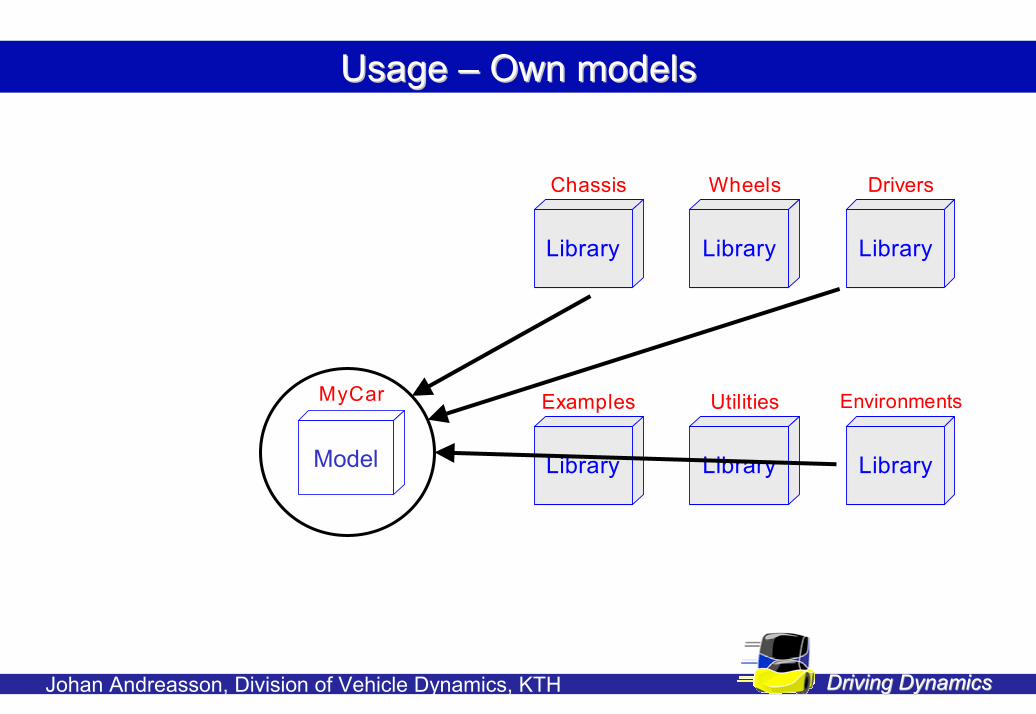
UsageUsage –– OwnOwn modelsmodels
Library
Chassis
Library
Wheels
Library
Drivers
Library
Examples
Library
Utilities
Library
Environments
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
Example
MyCar
Model
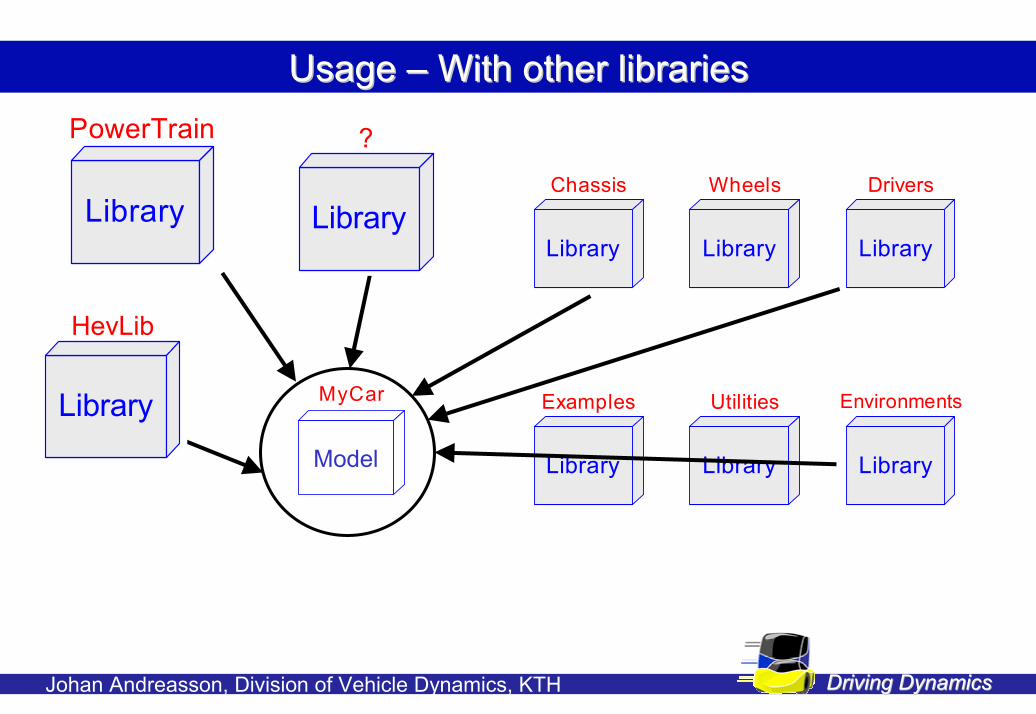
UsageUsage –– With With otherother librarieslibraries
Library
Chassis
Library
Wheels
Library
Drivers
Library
Examples
Library
Utilities
Library
Environments
Library
PowerTrain
Library
PowerTrainHevLib
Library
PowerTrain?
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
ResultsResults??
UsageUsage –– VisualisedVisualised performanceperformance
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
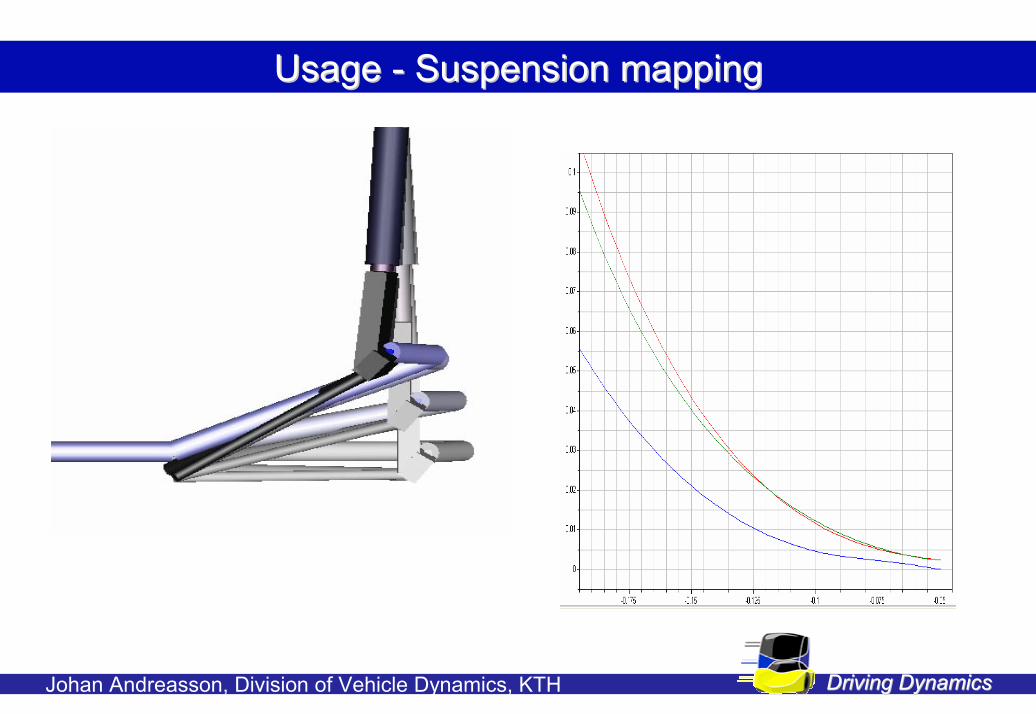
UsageUsage -- Suspension Suspension mappingmapping
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
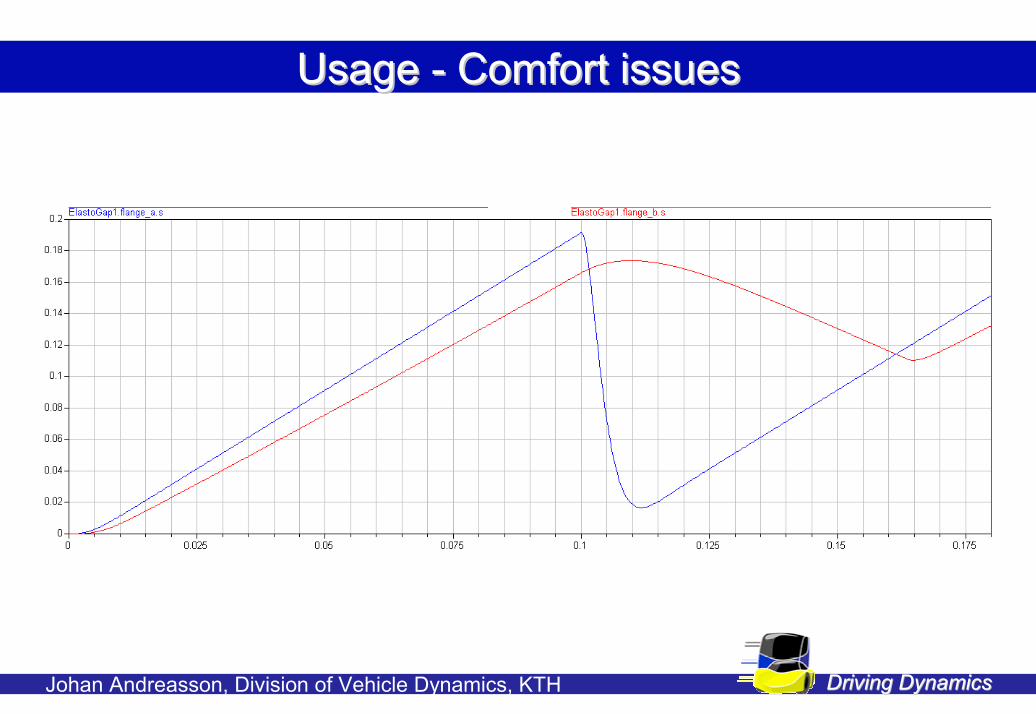
UsageUsage -- Comfort Comfort issuesissues
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving Dynamics
RelatedRelated librarieslibraries
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
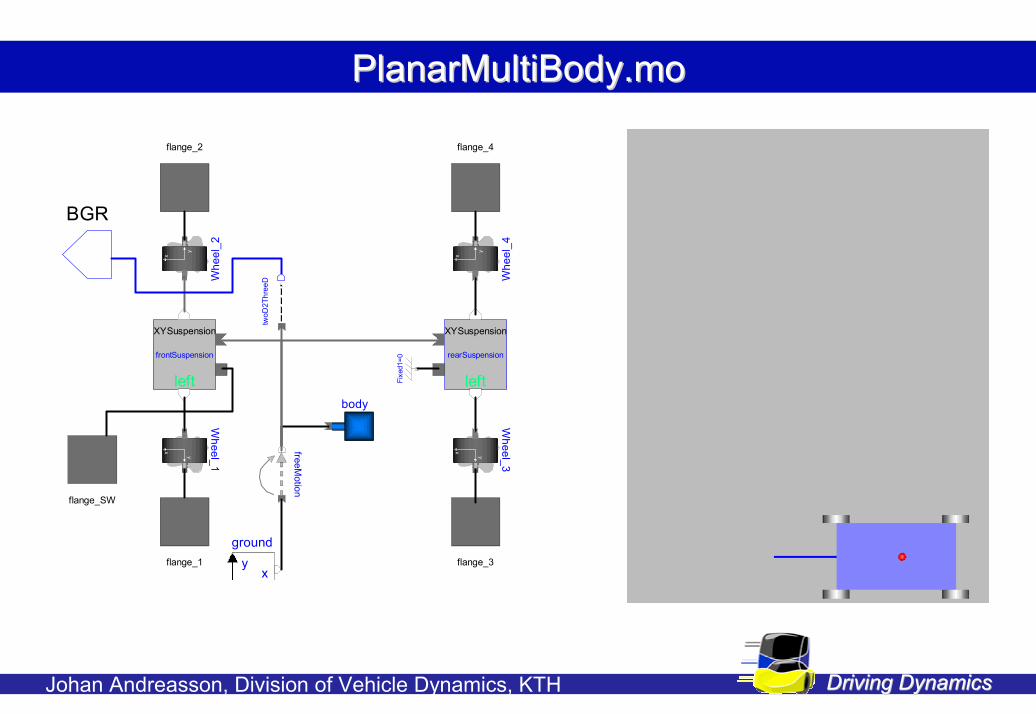
PlanarMultiBody.moPlanarMultiBody.mo
flange_SW
BGR
flange_2 flange_4
flange_1 flange_3
y
x
y
x
Wheel_1
y
x
y
x
Whe
el_2
y
x
y
x
Wheel_3
y
x
y
x
Whe
el_4
freeMotion
frontSuspension
left
XYSuspension
rearSuspension
left
XYSuspension
twoD
2Thr
eeD
ground
xy
bodyFi
xed1
=0
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
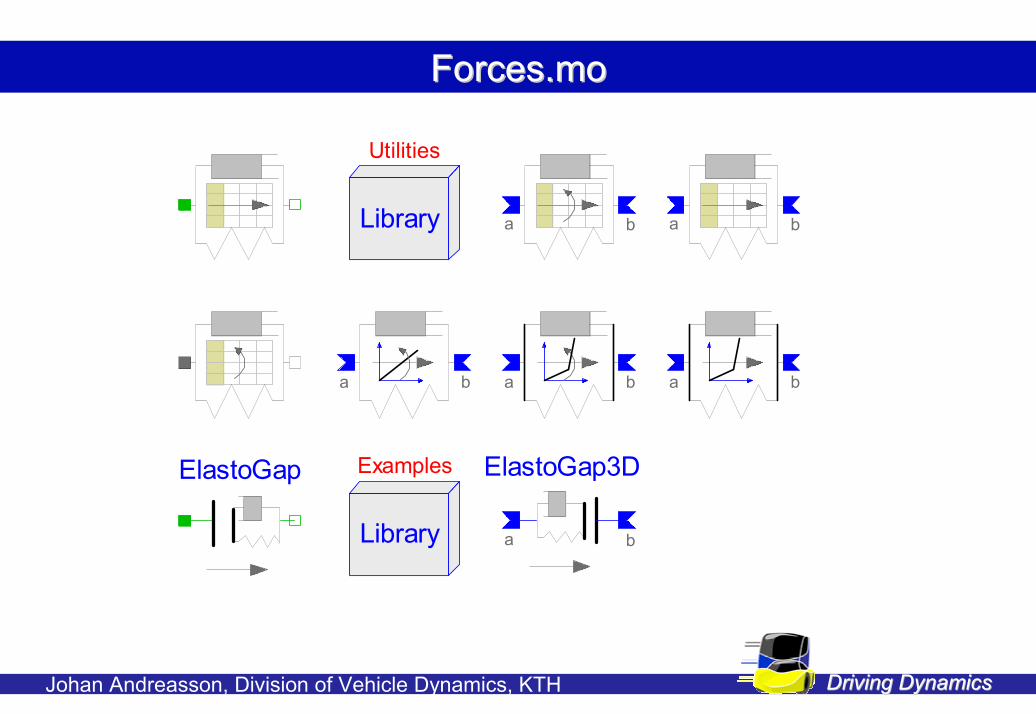
Forces.moForces.mo
Library
Utilities
a b a b
a b a b a b
ElastoGap
Library
Examples
a b
ElastoGap3D
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
SummarySummary
– Chassis modelling– Driving dynamics simulation– Interfacing other Modelica libraries
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving Dynamics
FutureFuture ImprovementsImprovements
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
EvaluationEvaluation aidsaids
• Related models– Drivers- Automatic test rigs- ...
• Motion constraints– Constant speed maneouvres– Constant radius turns– ...
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
ExtendedExtended flexibilityflexibility
• With/without bushings• Linear/nonlinear spring-dampers• Swapping tyre models• 1D-2D-3D geometries and combinations
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
ExtendedExtended flexibilityflexibility
• Different models share same interface.– Model focus/viewpoint can be changed easilly!

Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
flange_SW
BGR
flange_1 flange_3
ground
xy
whe
el_2
wheel_1
wheel_3
whe
el_4
freeMotion
frontSuspension
left
MacPherson
rearSuspension
left
TwistBeam
Different Different modelsmodels shareshare same interfacesame interface

Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
flange_SW
BGR
flange_1 flange_3
ground
xy
whe
el_2
wheel_1
wheel_3
whe
el_4
freeMotion
frontSuspension
left
MacPherson
rearSuspension
left
TwistBeam
flange_SW
BGR
flange_2 flange_4
flange_1 flange_3
y
x
y
x
Wheel_1
y
x
y
x
Whe
el_2
y
x
y
x
Wheel_3
y
x
y
x
Whe
el_4
freeMotion
frontSuspension
left
XYSuspension
rearSuspension
left
XYSuspension
twoD
2Thr
eeD
ground
xy
body
Fixe
d1=0
Different Different modelsmodels shareshare same interfacesame interface
planar

Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
ExtendedExtended flexibilityflexibility
• Different models share same interface.– Model focus/viewpoint can be changed easilly!– Higher requirements on interfaces!
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
SuitableSuitable interfaces?interfaces?
four wheelsteering?
Activesuspension?
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
ExtendedExtended flexibilityflexibility
• Different models share same interface.– Model focus/viewpoint can be changed easilly!– Higher requirements on interfaces!– Over-all model structure that is suitable!
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
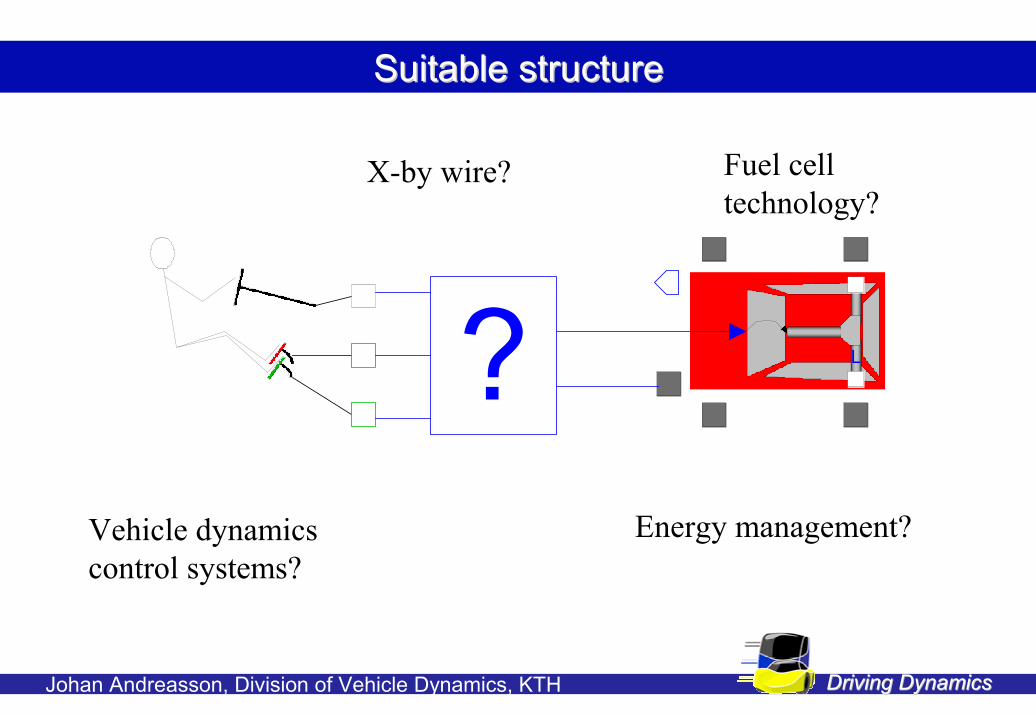
SuitableSuitable structurestructure
L?
X-by wire? Fuel cell technology?
Vehicle dynamicscontrol systems?
Energy management?

Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
ExtendedExtended flexibilityflexibility
• Different models share same interface.– Model focus/viewpoint can be changed easilly!– Higher requirements on interfaces!– Over-all model structure that is suitable!– Sub-models must know their limitations!
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
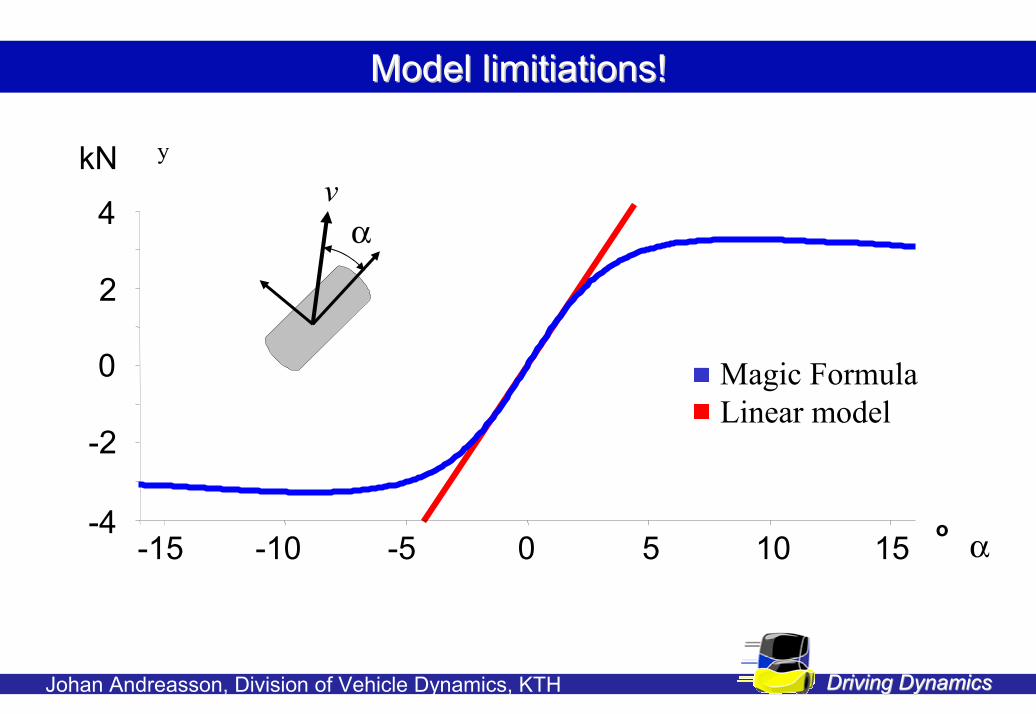
ModelModel limitiationslimitiations!!
-15 -10 -5 0 5 10 15
4
2
0
-2
-4
kN
o
αv
α
y
Magic FormulaLinear model
Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
AcknowledgementsAcknowledgements
• Dynasim AB• DLR

Johan Andreasson, Division of Vehicle Dynamics, KTH Driving DynamicsDriving Dynamics
ContactContact



![DRIVING DYNAMICS [ON-ROAD] · DRIVING DYNAMICS The New Discovery Sport features a second-generation All-Wheel Drive system, which takes you and your family to the countryside and](https://static.documents.pub/doc/80x56/5e6eb6f38d3e4156ab7bde03/driving-dynamics-on-road-driving-dynamics-the-new-discovery-sport-features-a-second-generation.jpg)



