

EE 570: Location and Navigation: Theory & Practice
The Global Positioning System (GPS)
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 1 of 23

The Global Positioning System (GPS)Dead Reckoning vs Position Fixing
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• Navigation can be accomplished via “position fixing” or “dead reckoning” Dead Reckoning - Measures changes in position and/or
attitudeo Inertial sensors provide relative position (and attitude)
Position Fixing - Directly measuring locationo GPS provides absolute position (and velocity)
• How does GPS work? Effectively via Multilateration
o If I can measure my distance to three (or more) satellites at known locations, then, own location can be resolved
– Measure distance via “time-of-flight” (speed of light)
Slide 2 of 23

The Global Positioning System (GPS)An Overview
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• The GPS is a Space-Based Global Navigation Satellite System (GNSS)1. Space segment (satellites)
o First satellites launched in 19892. Control segment (ground station(s))
o Master control segment, alternate, and monitors 3. User segment (receivers)
o Both military and civilian
• Other GPS-like systems exist GLONASS – Russian COMPASS/BeiDou – China Galileo - European Union (EU)
wikipedia
Slide 3 of 23

The Global Positioning System (GPS)Overview – The Space Segment
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• The Space Segment A constellation of 24 satellites
in 6 orbital planes Four satellites in each plane 20,200 km altitude at 55
inclinationo Each satellite’s orbital
period is ~12 hourso >6 satellites visible in each
hemisphere
Courtesy of MATLABSlide 4 of 23
The Global Positioning System (GPS)Overview – The Control segment
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
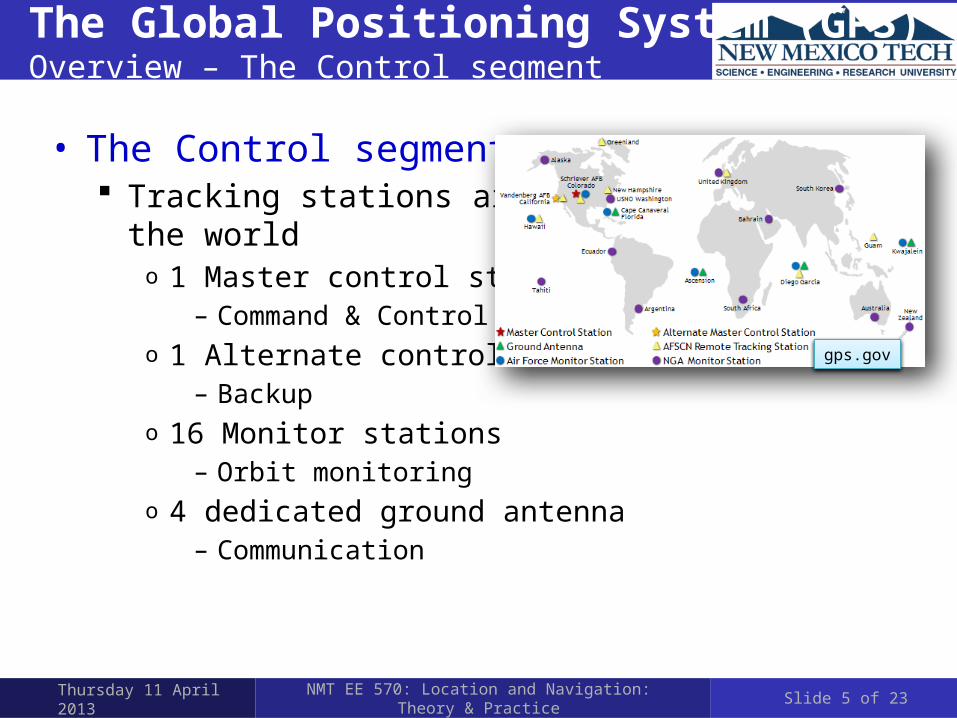
• The Control segment Tracking stations around
the worldo 1 Master control station
– Command & Controlo 1 Alternate control station
– Backupo 16 Monitor stations
– Orbit monitoringo 4 dedicated ground antenna
– Communication
gps.gov
Slide 5 of 23

The Global Positioning System (GPS)Overview – The User Segment
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• The User Segment Military receivers can receive encrypted
GPS signals to realize higher performance– E.g. Selectively Available Anti-Spoofing Module (SAASM ) and
Precise Positioning System (PPS) encrypted key based systems Civilian receivers
o Commercial handheld– e.g. Gamrin Montana 650
o OEM chipsets– ublox
» Multi-GNSS engine for GPS, GLONASS, Galileo and QZSS
– Vectornav» VN-200 OEM GPS-Aided Inertial Navigation System
NavAssure® 100
Slide 6 of 23

The Global Positioning System (GPS)Multilateration - Intersection of Spheres
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
1 satellite – A sphere2 s
atell
ites –
A ci
rcle
3 satellites – Two points
Slide 7 of 23

The Global Positioning System (GPS)Multilateration - Intersection of Spheres
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• Only one of the two points will be feasible E.g. on the surface of the Earth
3 satellites – Two points
Slide 8 of 23

The Global Positioning System (GPS)Multilateration – Basic Idea
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• Multilateration – The Basic Idea Determine range to a given satellite via time-of-flight of an
RF signal (i.e. speed of light) Requires very precise
time baseso Receiver clock bias
Slide 9 of 23

The Global Positioning System (GPS)Modulation Scheme
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• Position is determined by the travel time of a signal from four or more satellites to the receiving antenna Three satellites for X, Y, Z position, one satellite to solve for
clock biases in the receiver
Image Source: NASA
Transmission Time
Receiver
Time delay
Satellite
Slide 10 of 23

The Global Positioning System (GPS)Modulation Scheme
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• The GPS employs quadrature Binary Phase Shift Keying (BPSK) modulation at two frequencies (CDMA) L1 = 1,575.42 MHz
o 1 = 19 cm L2 = 1,227.6 MHz
o 1 = 24 cm
• Two main PRN codes C/A: Course acquisition
o 10-bit 1 MHz P: Precise
o 40 bit 10 MHzo Encrypted P(Y) code
Slide 11 of 23

The Global Positioning System (GPS)Modulation Scheme
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• Quadrature BPSK modulation
Ref: JNC 2010 GPS 101 Short Course by Jacob Campbell
Slide 12 of 23

The Global Positioning System (GPS)Signal Processing
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• Code and Carrier Phase Processing Code used to determine user’s gross position Carrier phase difference can be used to gain more accurate
positiono Timing of signals must be known to within one carrier cycle
Slide 13 of 23

The Global Positioning System (GPS)Pseudorange
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
1 23
n
Sat 1
(x 1,y 1,z 1
)
Sat2(x
2 ,y2 ,z2 )
Sat3
(x3,y3,z3)
Sat n
(x n,y n,z n)
GPS receiver(x,y,z)
All measurements in ECEF coordinates
2 2 2
i i i ix x y y z z
2 2 2 2 2
2 2
2
2 2
i i i i
i i i
x x x x y y
y y z z z z
2 2 2 2 2 2 2 2 2 2i i i i i i ix y z x y z x x y y z z
2 2 2 21 1 1 1
1 1 12 2 2 22 2 2 2 2 2 2
2 2 2 2
2 2 2
2 2 2
2 2 2
e
e
n n nn n n n e
x y z r x y zx
x y z r x y zy
zx y zx y z r
..
.
- pseudorangere - Earth’s radius
Slide 14 of 23

The Global Positioning System (GPS)Pseudorange
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• A more realistic model is
• Can perturb this model to form
• This can be solved via least-squares or Kalman filter
2 2 2
i i i i ix x y y z z c T n
1
2
1
1
1n
x
yn
z
c t
Slide 15 of 23

The Global Positioning System (GPS)Sources Of Error - GDOP
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• Geometry of satellite constellation wrt to receiver• Good GDOP occurs when
Satellites just above the horizon spaced and one satellite directly overhead
• Bad GDOP when pseodurange vectors are almostlinearly dependent
Slide 16 of 23

The Global Positioning System (GPS)Other Sources Of Error
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• Selective Availability Intentional errors in PRN Discontinued in 5/1/2000
• Atmospheric Effects Ionospheric Tropospheric
• Multipath• Ephemeris Error
(satellite position data)• Satellite Clock Error• Receiver Clock Error
Slide 17 of 23

The Global Positioning System (GPS)Error Mitigation Techniques
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• Carriers at L1 = 1,575.42 MHz & L2 = 1,227.6 MHz Ionospheric error is frequency dependent so using two
frequencies helps to limit error• Differential GPS
Post-Process user measurements using measured error values
• Space Based Augmentation Systems(SBAS) Examples are U.S. Wide Area Augmentation System (WAAS),
European Geostationary Navigational Overlay Service (EGNOS)
SBAS provides atmospheric, ephemeris and satellite clock error correction values in real time
Slide 18 of 23

The Global Positioning System (GPS)Error Mitigation Techniques – Differential GPS
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• Uses a GPS receiver at a fixed, surveyed location to measure error in pseudorange signals from satellites Pseudorange error for each satellite is subtracted from
mobile receiver before calculating position (typically post processed)
Slide 19 of 23

The Global Positioning System (GPS)Error Mitigation Techniques - WAAS/EGNOS
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• Provide corrections based on user position• Assumes
atmosphericerror is locally correlated
Slide 20 of 23

The Global Positioning System (GPS)Summary of the Sources of Error
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• Single satellite pseudorange measurement
• GPS error summary SPS: L1 C/A with S/A off PPS: Dual frequency P/Y code
Ref: Navigation System Design by Eduardo Nebot, Centre of Excellence for Autonomous Systems, The University of Sydney
Slide 21 of 23
measured true ionospheric tropospheric ephemeris satelite clock receiver clock multipath
Table 1. GPS Error sources: SPS vs PPS
ERROR
SOURCE
DETERMINISTIC RANDOM TOTAL (RMSE) DGPS
SPS PPS SPS PPS SPS PPS SPS PPS Ephemeris 2.1 2.1 0.0 0.0 2.1 2.1 0.0 0.0
Satellite Clock 2.0 2.0 0.7 0.7 2.1 2.1 0.0 0.0 Ionosphere 4.0 1.0 0.5 0.5 4.0 1.2 0.4 0.1
Troposphere 0.5 1.0 0.5 1.0 0.7 1.4 0.2 1.4 Multipath 1.0 1.0 1.0 1.0 1.4 1.4 1.4 1.4
UERE 5.1 3.3 1.4 1.5 5.3 3.6 1.6 1.5
Vertical 1 12.8 8.6 3.9 3.7 Horizontal 1 10.2 6.6 3.1 3.0

II/IIA IIR IIR M‐ IIF III (A,B,C)
Number SV’s 28 13 8 12 30*
First Launch 1989 1997 2005 2010* 2014*
Satellite Weight (Kg)
900 1,100 1,100 844 TBD
Power (W) 1,100 1,700 1,700 NA TBD
Design Life (Years)
7.5 10 10 15* TBD
Unit Cost ($M) 43 30 30 39* TBD
In Use (2010) 11 12 7 0 0
II/IIA IIR IIR M‐ IIF III (A,B,C)
Number SV’s 28 13 8 12 30*
First Launch 1989 1997 2005 2010* 2014*
Satellite Weight (Kg)
900 1,100 1,100 844 TBD
Power (W) 1,100 1,700 1,700 NA TBD
Design Life (Years)
7.5 10 10 15* TBD
Unit Cost ($M) 43 30 30 39* TBD
In Use (2010) 11 12 7 0 0
II/IIA IIR IIR M‐ IIF III (A,B,C)
Number SV’s 28 13 8 12 30*
First Launch 1989 1997 2005 2010* 2014*
Satellite Weight (Kg)
900 1,100 1,100 844 TBD
Power (W) 1,100 1,700 1,700 NA TBD
Design Life (Years)
7.5 10 10 15* TBD
Unit Cost ($M) 43 30 30 39* TBD
In Use (2010) 11 12 7 0 0
II/IIA IIR IIR M‐ IIF III (A,B,C)
Number SV’s 28 13 8 12 30*
First Launch 1989 1997 2005 2010* 2014*
Satellite Weight (Kg)
900 1,100 1,100 844 TBD
Power (W) 1,100 1,700 1,700 NA TBD
Design Life (Years)
7.5 10 10 15* TBD
Unit Cost ($M) 43 30 30 39* TBD
In Use (2010) 11 12 7 0 0
The Global Positioning System (GPS)The Future of GPS
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice
• The Future of GPS
II/IIA IIR IIR M‐ IIF III (A,B,C)
Number SV’s 28 13 8 12 30*
First Launch 1989 1997 2005 2010* 2014*
Satellite Weight (Kg)
900 1,100 1,100 844 TBD
Power (W) 1,100 1,700 1,700 NA TBD
Design Life (Years)
7.5 10 10 15* TBD
Unit Cost ($M) 43 30 30 39* TBD
In Use (2010) 11 12 7 0 0
Slide 22 of 23

The Global Positioning System (GPS)The Future of GPS
Thursday 11 April 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 23 of 23







