
*1
Robotic Hand with Flexible Fingers for Grasping Cylindrical Objects
Mizuho SHIBATA*1
In this manuscript, a robotic hand for grasping a cylindrical object is proposed. This robotic hand has flexible fingers that can hold a cylindrical object during moving. We introduce a grasping strategy for a cylindrical object in terms of state transition graph. In this strategy the robotic hand picks up the cylindrical object utilizing a suction device before the hand grasp the object. We also design the flexible fingers; then, we investigate the validity of this robotic hand via several experiments.
Keywords: Flexible finger, Robotic hand, Grasping, Cylindrical Object
(1)
(2)
(3)
(4)
1
(5) 4
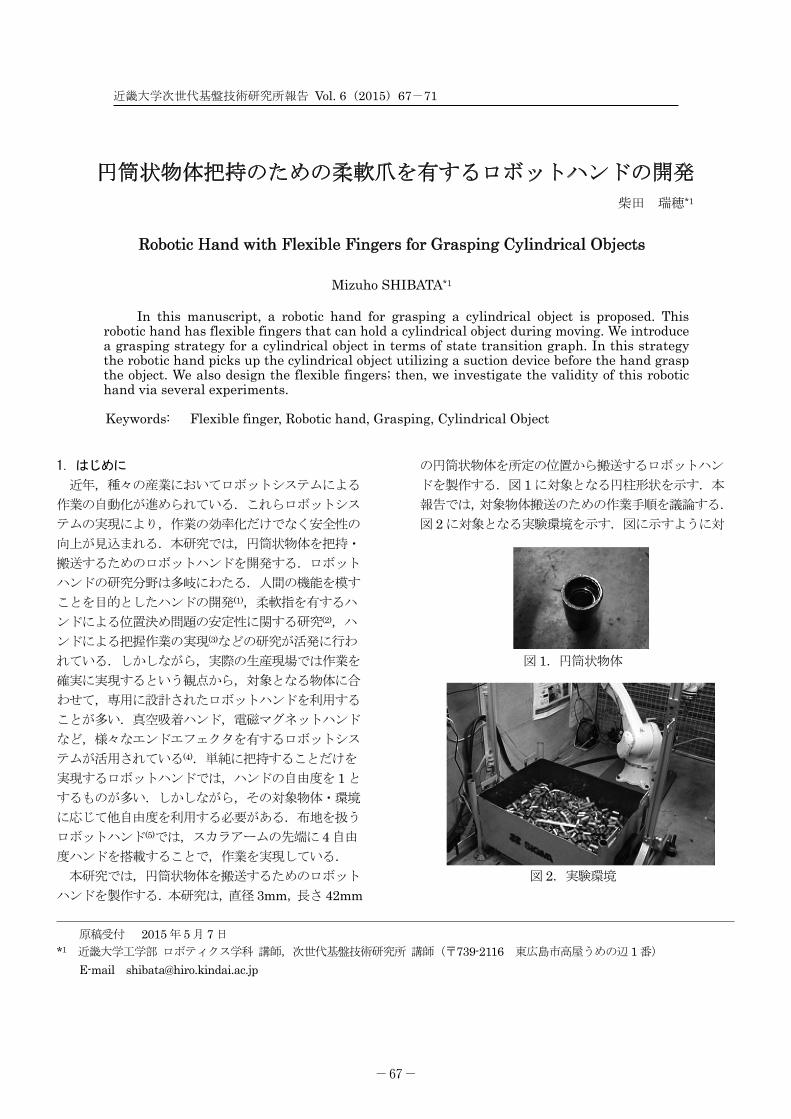
3mm 42mm
1
2
1
2
2015 5 7
*1 739-2116 1E-mail [email protected]
- 67 -
近畿大学次世代基盤技術研究所報告 Vol. 6(2015)67-71

1
2
1
5kg
250mm
(6)
nL , L = n (n 1)/2
n Ln
a b c
d e f
3
2
L 1
2
3
a b
Object Finger Vacuum suction pad
- 68 -

c
d
e
f
(e) (f) 2(d)
4
rx c
4 x 0 x 1 x 1 x 2 x 2 x 3 x 3 x 4
L 0 L 1 L 2 L 3
x 2 x 3 x 3 x 4
x 2 x 3 x 3 x 4 x c rx 0 x 1 x 1 x 2 x 2 x 3 x 3 x
x 0 1 2 3
x c x 0 rL 0 L 3 , 0 , 1
2 , 3
N x N = [xN, yN]T
N 1~4 T
(1)
(2)
N-1
(3)2 , 3
x 3 x 4
4
x 2 x 3 x 3 x 4x 2 x 3
ax+by+c = 0
(4) (5)
(6) x c = [xc, yc]T x 2 x 3
(7)
x 2 x 3x 3 x 4
(7)
5 ATBDA 25 60
FH100sereies F125-D
SUS304
5 kg250 mm 80 mm 150 mm
RS10L
4
- 69 -

6
6
(a)
(b) (c) (d) (e) (f) (g) (h)
(a)(d) (e)
1 , , , , ,, , Gifu Hand
III , , Vol. 22, No. 1, pp. 55-56, 2004.
2 , , , 3
, , Vol. 29, No. 1, pp. 89-98, 2011.
3 , , , ,
- 70 -

, , Vol. 7, No. 3, pp. 161-171, 1989.
4 G. J. Monkman, S. Hesse, R. Steinmann, H. Schunk, “Robot Grippers”, Wiley-VCH Verlag GmbH & Co. KGaA, 2007.
5
Vol.27, No.9, pp.67-74 2009. 6 , , ,
, 2005.
- 71 -
![2014 MATH Olympiad [Grade 2] - Eye Level Learning · Î Î Î Ö Ò Ò Ð Ö Ð Î 2014 MATH Olympiad [Grade 7] 0 Sol 0 × Î â ×íÔÒ á ÎÎ íÏÒ ì Ó Î 28. Þ ß 41. 4 bags](https://static.documents.pub/doc/80x56/5b08e90f7f8b9a992a8cefd7/2014-math-olympiad-grade-2-eye-level-2014-math-olympiad-grade-7-0-sol-0-28.jpg)






