

Elective in Robotics – Haptic and Locomotion Interfaces 1
Elective in Robotics
Geomagic Touch
Prof. Alessandro De Luca

Geomagic Touch haptic device
Elective in Robotics – Haptic and Locomotion Interfaces 2
3D for2 devices available at DIAG Robotics Lab
two penbuttons

Phantom Omni (it is the same!)
SensAble Technologies ⇒ now 3D Systems
PHANTOM Omni ⇒ now Geomagic Touch
Elective in Robotics – Haptic and Locomotion Interfaces 3

Geomagic Touch data sheet
Elective in Robotics – Haptic and Locomotion Interfaces 4
(1.42 kg)
(6 Degrees of Freedom)
(3 Degrees of Freedom)

Geomagic Touch in action(actually, a Sensable Omni...)
Elective in Robotics – Haptic and Locomotion Interfaces 5
https://youtu.be/REA97hRX0WQ
video

Haptic rendering control loop
� joint displacement sensing (on device)
� (direct) kinematics� collision detection
(environmentgeometry)
� surface pointdetermination
� force calculation � kineto-statics� actuation
(on device)
Elective in Robotics – Haptic and Locomotion Interfaces 6

Force feedback from Virtual or Real world
virtualenvironmentcompliance
modeled with a spring/damper
Elective in Robotics – Haptic and Locomotion Interfaces 7

Force generation signals
Elective in Robotics – Haptic and Locomotion Interfaces 8
desired force(in software) counts
volts
amplifiers
actuatortorques
end-point(3D) force
D/A
© Allison M. Okamura, 2015
voltage or current
transmissionsand kinematics
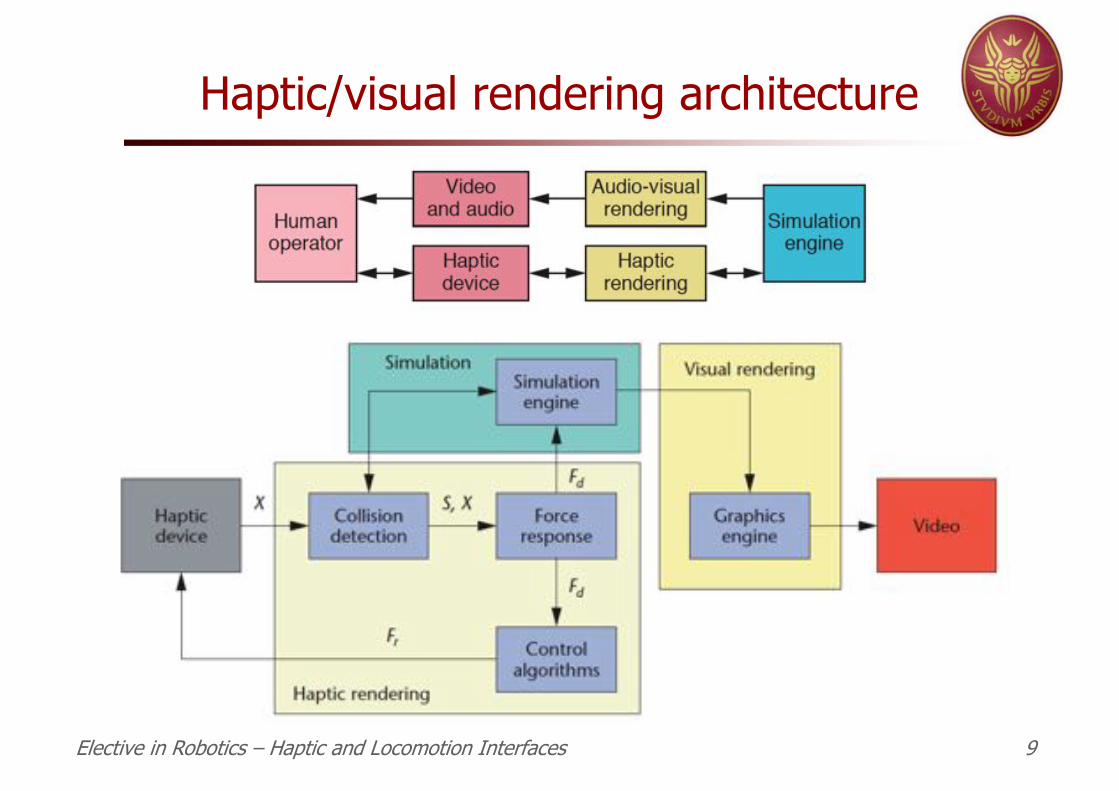
Haptic/visual rendering architecture
Elective in Robotics – Haptic and Locomotion Interfaces 9

OpenHaptics 3.3.0
Elective in Robotics – Haptic and Locomotion Interfaces 10
common stepsn parsing geometry files from
popular animation packagesn creating graphics windows and
initializing OpenGL environmentn initializing the haptic devicesn scene and camera designn mapping force and stiffness
parameters to objects in the scenen setting up callback responses to
interaction devices
makes programming simpler by encapsulating the basic common steps to all haptics/graphics applications in C++ classes of the QuickHaptics micro API

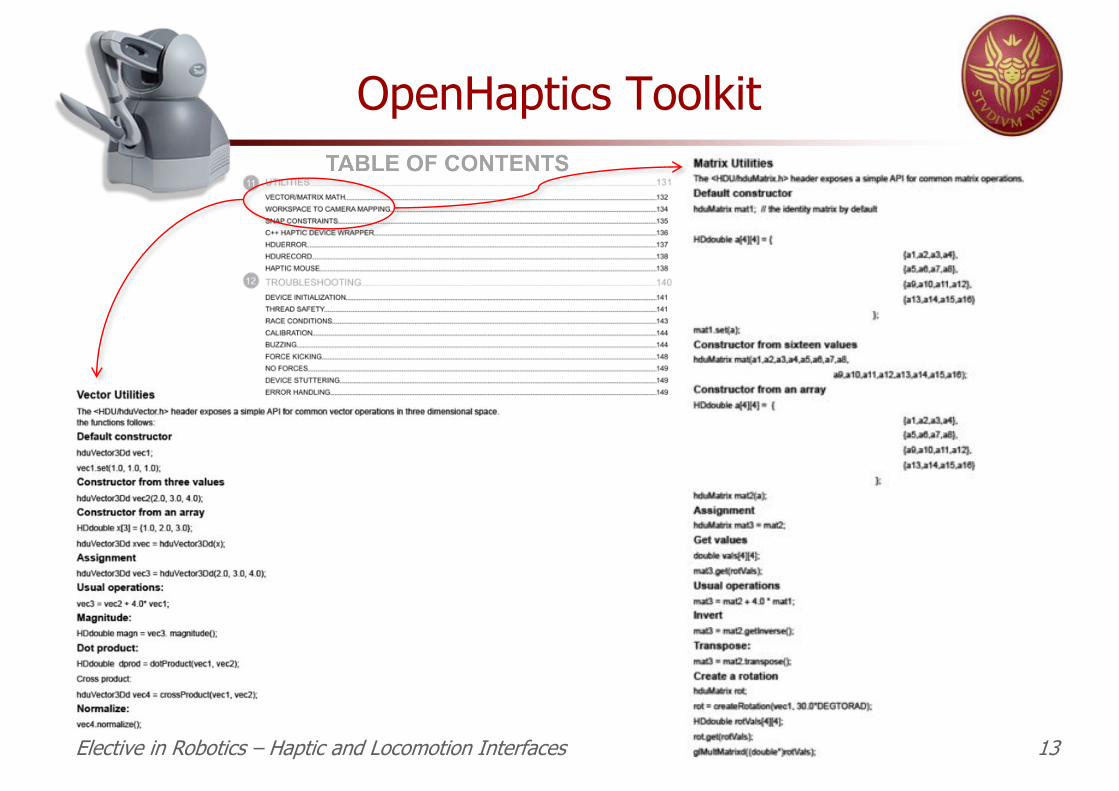
OpenHaptics Toolkit
Elective in Robotics – Haptic and Locomotion Interfaces 11

OpenHaptics Toolkit
Elective in Robotics – Haptic and Locomotion Interfaces 12
Haptic Device API
Haptic Library API
OpenHaptics Toolkit
Elective in Robotics – Haptic and Locomotion Interfaces 13
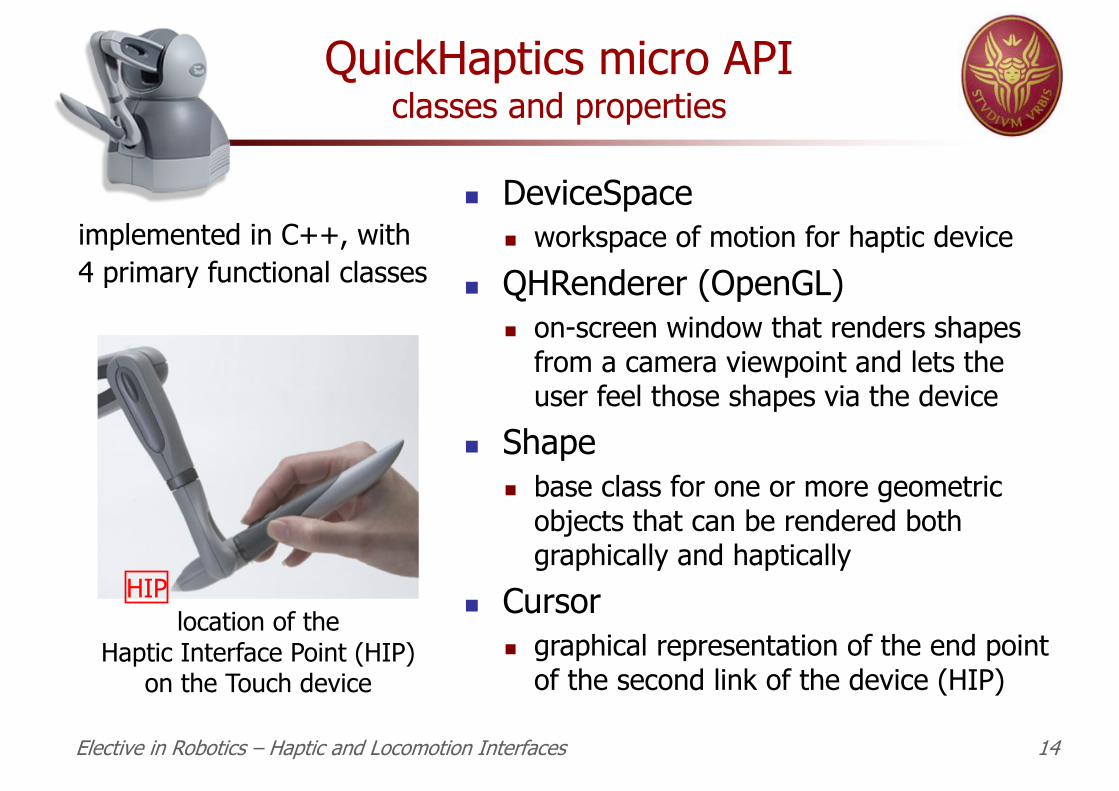
QuickHaptics micro APIclasses and properties
Elective in Robotics – Haptic and Locomotion Interfaces 14
location of theHaptic Interface Point (HIP)
on the Touch device
n DeviceSpacen workspace of motion for haptic device
n QHRenderer (OpenGL)n on-screen window that renders shapes
from a camera viewpoint and lets the user feel those shapes via the device
n Shapen base class for one or more geometric
objects that can be rendered both graphically and haptically
n Cursorn graphical representation of the end point
of the second link of the device (HIP)
implemented in C++, with 4 primary functional classes
HIP
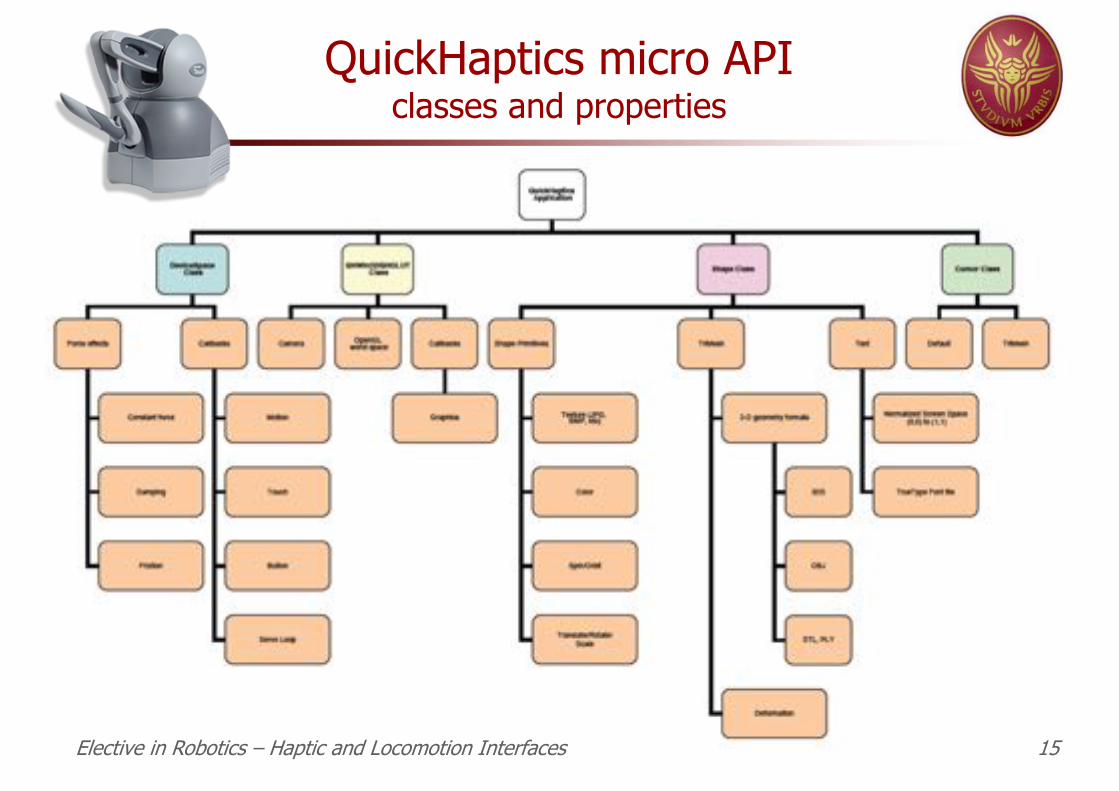
QuickHaptics micro APIclasses and properties
Elective in Robotics – Haptic and Locomotion Interfaces 15
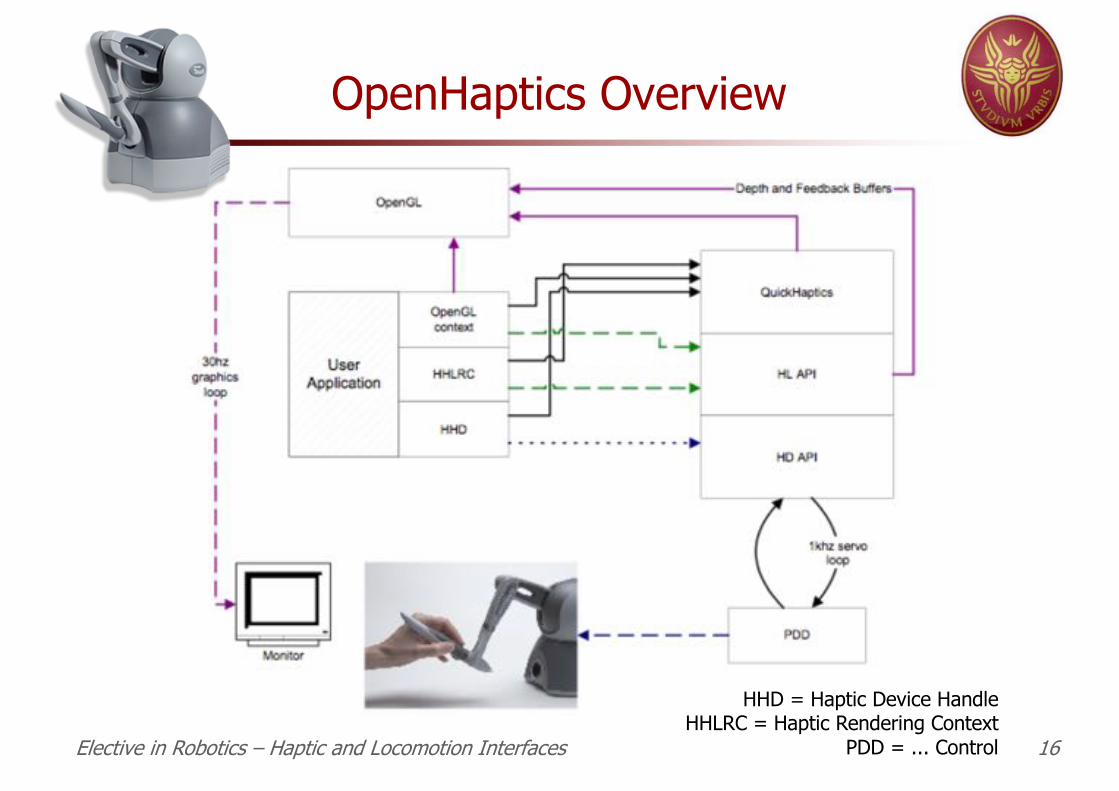
OpenHaptics Overview
Elective in Robotics – Haptic and Locomotion Interfaces 16
HHD = Haptic Device Handle HHLRC = Haptic Rendering Context
PDD = ... Control

Setting up the system
Elective in Robotics – Haptic and Locomotion Interfaces 17
CPU IP address
pairing the device
calibrating the device (stylus in the ink well)
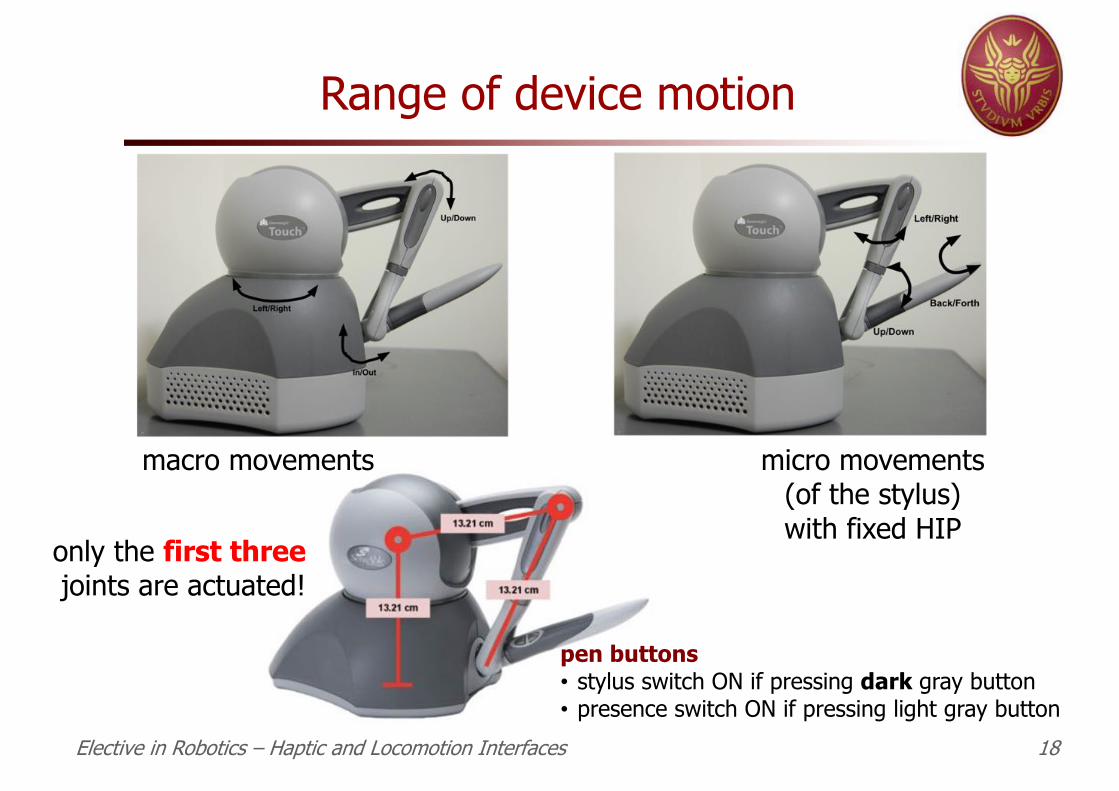
Range of device motion
Elective in Robotics – Haptic and Locomotion Interfaces 18
macro movements micro movements(of the stylus)with fixed HIP
only the first three joints are actuated!
pen buttons• stylus switch ON if pressing dark gray button• presence switch ON if pressing light gray button
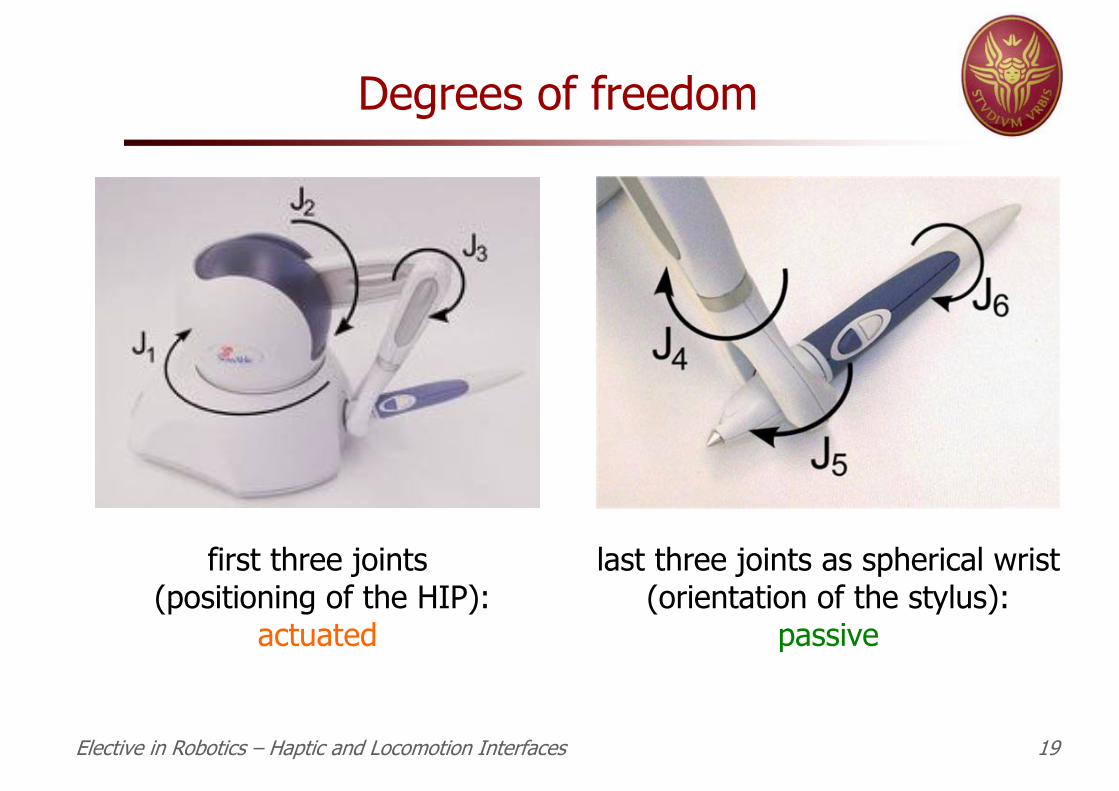
Degrees of freedom
Elective in Robotics – Haptic and Locomotion Interfaces 19
first three joints(positioning of the HIP):
actuated
last three joints as spherical wrist(orientation of the stylus):
passive

n DH parameters and forward kinematicsn inverse kinematicsn Jacobian matrix and singularitiesn joint level PD and PID controln trajectory planning (joint space vs. task space)n various haptic (force) rendering laws
n force fields, “god point”, hard and soft contacts
n on-going development of a software environment for the simulation of the haptic device...
What could be studied?
Elective in Robotics – Haptic and Locomotion Interfaces 20

Medical application
Elective in Robotics – Haptic and Locomotion Interfaces 21

Laboratory test bedwith KUKA LWR4
Elective in Robotics – Haptic and Locomotion Interfaces 22
slave = KUKA robot manipulator
master = Touch haptic device
reference frames

Teleoperation control(4-way) general scheme
Elective in Robotics – Haptic and Locomotion Interfaces 23
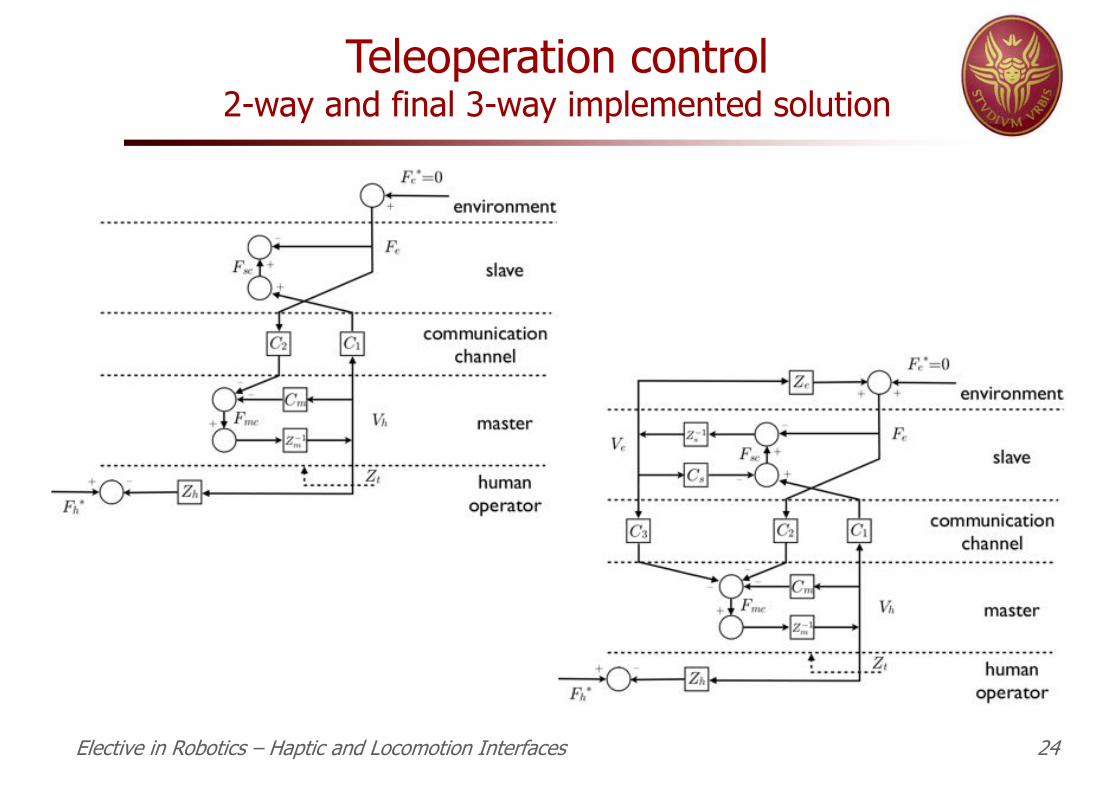
Teleoperation control2-way and final 3-way implemented solution
Elective in Robotics – Haptic and Locomotion Interfaces 24
Bibliography
n B. Hannaford, A.M. Okamura, “Haptics”, Springer Handbook of Robotics (O. Khatib, B. Siciliano, Eds.), Springer, 2008
n K. Salisbury, F. Conti, F. Barbagli, “Haptic rendering: Introductory concepts,” IEEE Computer Graphics and Applications, vol. 24, pp. 24-32, 2004
Elective in Robotics – Haptic and Locomotion Interfaces 25

“hands on” trial
Elective in Robotics – Haptic and Locomotion Interfaces 26
First demo presented in April 2016 byAndrea Perica and Francesco Iodice
This year demo is on December 1, 2017 16:00-18:00, c/o room A4introduced by Prof. Marilena Vendittelli







