

Advanced Temporal Decoupling (ATD) European SystemC Users’ Group Workshop
2013/03/22 Grenoble
Simon Hufnagel, Hendrik Post, Nico Bannow Christoph Grimm
Robert Bosch GmbH Technical University Kaiserslautern
Corporate Sector
Research and Advance Engineering
CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Improving Timing Accuracy for TLM-LT
Models
1

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Content
Context
Transaction Level Modeling
Advanced Temporal Decoupling (ATD)
Case Study “Night Vision“
Conclusion
2

Seamless Modeling
Refinement, Evaluation,
Test
CR/AEH2 | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Context
Compilation
Results
Optimization
Refinement
Simulation
Analysis
C-Code
Translation
Algorithm
Idea
Modeling
Final System
Environment
Digital Analog
Functional
Environment
Digital AnalogDigital Analog
Functional
Implementation
ATD Modeling Method
3
Advanced Temporal Decoupling

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Context
Central Question
„How to efficiently create accurate and performing virtual prototypes?”
Transparent TLM*) Advanced Temporal Decoupling (ATD)
*) see 26th ESCUG Workshop Dresden 2012:
“Using IP-XACT to ease system development with SystemC TLM
The Transparent TLM (TTLM) Approach”
Simon Hufnagel, Bosch, DE,
Christoph Grimm, Vienna University of Technology, AT
4

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Context
Abstraction Level Overview
Functional Level no hardware aspects (architecture, timing)
communication based on shared variables and function calls
Transaction Level basic hardware structure
transaction based communication
timing accuracy from untimed to cycle accurate
Register Transfer Level synthesizable hardware specification
signal based communication
clock cycle accurate timing
function
1
function
2
function
3
Master
1
Master
2
Slave 1 Slave 2
Bus
comb.
logic
comb.
logic
clk
D D Q Q
risin
g a
bstr
action
5

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Content
Context
Transaction Level Modeling
Advanced Temporal Decoupling (ATD)
Case Study “Night Vision“
Conclusion
6

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Transaction Level Modeling
Transaction Level Modeling Variants
TLM-CA
Functional
Model
TLM-PVT
untimed approximately
timed
cycle
accurate
application
packet
bus packet
bus word
Timing Accuracy
Data Granularity
figure according to: “Transaction Level Modeling – An Abstraction Beyond RTL”, L. Maillet-Contoz and F. Ghenassia, Springer, 2005
TLM-PV: programmer’s view
TLM-PVT: programmer’s view with timing
TLM-CA: cycle-accurate
TLM-PV
TLM-PVT
7
RTL

timing granularity varies with the number of function calls per transaction
CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Transaction Level Modeling
Transaction Level Modeling Techniques*)
*) according to: Accellera Systems Initiative. “IEEE 1666-2011 Standard SystemC 2.3.” IEEE Std 1666TM-2011.
Target Initiator
multiple function calls
request
response
001 ttt
0t
223 ttt
wait 0t
wait 2t
wait 1t
wait 3t
112 ttt
334 ttt
approximately timed
simulated time
Target Initiator
initiate
finish
single function call
001 ttt
0t
wait 0t
wait 1t112 ttt
loosely timed
simulated time
8

global simulation time is extended by local simulation time offset
communication time consumption is aggregated
CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Transaction Level Modeling
Temporal Decoupling*)
*) according to: Accellera Systems Initiative. “IEEE 1666-2011 Standard SystemC 2.3.” IEEE Std 1666TM-2011.
Target Initiator 0t
wait 1t
simulated time
local offset 101 ttt
0
initiate 0t 0t
finish 1t 1t
9

Interfered bus accesses by multiple masters 3 word low priority transfer from Master 1 to Slave 1 starting @ 100ns
3 word high priority transfer from Master 2 to Slave 2 starting @ 200ns
CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Transaction Level Modeling
Simple TLM Example
Thread 1 Thread 2 Master 1 Master 2
simulated time
Thread 1 Thread 2
100ns
200ns
300ns
Slave 1 Slave 2
400ns
0ns
Bus
interruption of low
priority transfer
continuation of low
priority transfer
= Shared Resource Access (SRA)
low prio
high prio
= 50ns
expected timing behavior:
word 1/3
word 2/3
word 3/3
word 1/3
word 2/3
word 3/3
= Shared Resource
10

low prio
word 1/3
Low priority word trans-
fer looses arbitration … word 1/3
high prio
300ns word 2/3
word 3/3
400ns
… and continues after
high priority transfer word 3/3
successive single word transfers Masters send one single word TLM transaction per clock cycle
Bus arbitrates masters within each clock cycle
CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Transaction Level Modeling
TLM – Cycle Accurate Implementation
Thread 1 Thread 2
Master 1 Master 2
Thread 1 Thread 2
Slave 1 Slave 2
simulated time
0ns
Bus
Exhaustive timing accuracy
Low simulation performance due to tiny simulation step width
= 50ns
100ns
200ns
word 2/3
11

One burst transfer per master Masters initiate one application packet transfer at designated start times
Typically, transactions are executed immediately within master’s context
CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Transaction Level Modeling
TLM-PVT – Non Cycle Accurate Implementation
Thread 1 Thread 2
Master 1 Master 2
simulated time
Thread 1 Thread 2 100ns
200ns
300ns Slave 1 Slave 2
400ns
0ns
Bus Resource contention
disregarded
High simulation speed due to lowered simulation time granularity
Reduced simulation accuracy due to disregarded resource contention
low prio
high prio = 50ns
3 words
3 words
12

Further simulation speed improvement due to reduced context switch count
In order execution is not assured automatically & timing errors are accumulated
Masters run ahead in simulation time Masters initiate multiple 3 word burst transfers at designated start times without
suspending
CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Transaction Level Modeling
Temporal decoupled Implementation
Thread 1 Thread 2
Master 1 Master 2
simulated time
Thread 1 Thread 2 200ns
400ns
600ns Slave 1 Slave 2
800ns
0ns
Bus
Timing error
accumulation
= 50ns
low prio
3 words
low prio
3 words
high prio
3 words
high prio
3 words
13
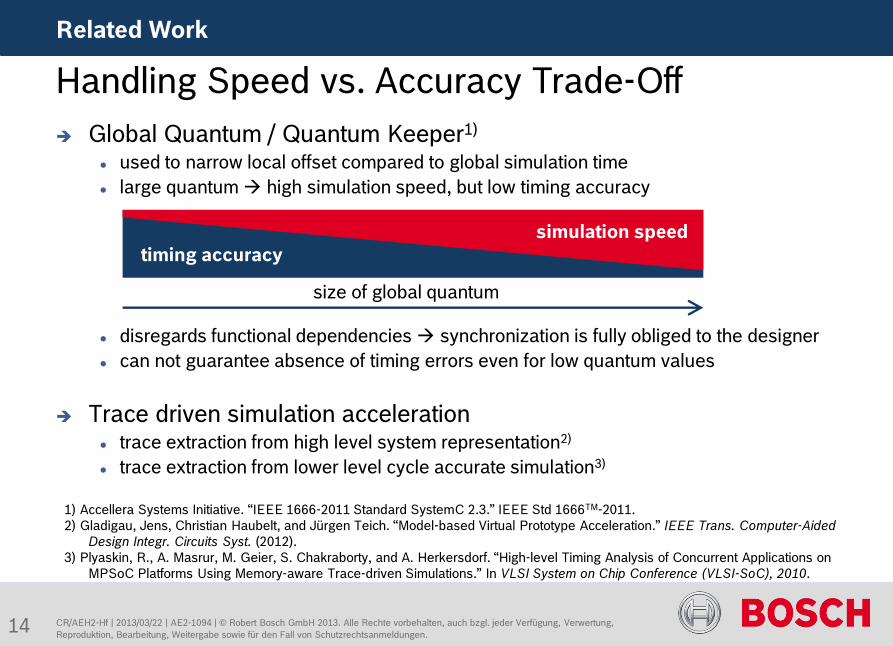
Global Quantum / Quantum Keeper1)
used to narrow local offset compared to global simulation time
large quantum high simulation speed, but low timing accuracy
disregards functional dependencies synchronization is fully obliged to the designer
can not guarantee absence of timing errors even for low quantum values
Trace driven simulation acceleration
trace extraction from high level system representation2)
trace extraction from lower level cycle accurate simulation3)
CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Related Work
Handling Speed vs. Accuracy Trade-Off
1) Accellera Systems Initiative. “IEEE 1666-2011 Standard SystemC 2.3.” IEEE Std 1666TM-2011.
2) Gladigau, Jens, Christian Haubelt, and Jürgen Teich. “Model-based Virtual Prototype Acceleration.” IEEE Trans. Computer-Aided
Design Integr. Circuits Syst. (2012).
3) Plyaskin, R., A. Masrur, M. Geier, S. Chakraborty, and A. Herkersdorf. “High-level Timing Analysis of Concurrent Applications on
MPSoC Platforms Using Memory-aware Trace-driven Simulations.” In VLSI System on Chip Conference (VLSI-SoC), 2010.
simulation speed
timing accuracy
size of global quantum
14

Statistical approaches1),2)
resource contention effects are approximated using statistical methods or finer grained
previous simulations
cycle accuracy can not be achieved
Postponed timing correction in case of resource conflicts:
Quantum Giver3), TLM+ Resource Model4), Result Oriented Modeling5)
resource contention is detected and simulation time of the corresponding thread is
updated accordingly
transactions are executed with non-preemptable semantic (either at the designated start
time or end time of the transaction)
CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Related Work
Improving Timing Accuracy
15
1) Bobrek, Alex, JoAnn M. Paul, and Donald E. Thomas. “Shared Resource Access Attributes for High-level Contention Models.” In
Proceedings of the 44th Annual Design Automation Conference, 720–725. DAC ’07. New York, NY, USA: ACM, 2007.
2) Atitallah, Rabie Ben, Smail Niar, Samy Meftali, and Jean-Luc Dekeyser. “An MPSoC Performance Estimation Framework Using
Transaction Level Modeling.” In An MPSoC Performance Estimation Framework Using Transaction Level Modeling, 2007.
3) Stattelmann, S., O. Bringmann, and W. Rosenstiel. “Fast and Accurate Resource Conflict Simulation for Performance Analysis of
Multi-core Systems.” In Design, Automation Test in Europe Conference Exhibition (DATE), 2011, 1–6, 2011.
4) Ecker, Wolfgang, Volkan Esen, Robert Schwencker, Thomas Steininger, and Michael Velten. “TLM+ Modeling of Embedded HW/SW
Systems.” In Design, Automation & Test in Europe Conference & Exhibition (DATE), 2010, 75–80, 2010.
5) Schirner, G., and R. Dömer. “Result-Oriented Modeling - A Novel Technique for Fast and Accurate TLM.” Computer-Aided Design of
Integrated Circuits and Systems, IEEE Transactions On 26, no. 9 (September 2007): 1688 –1699.

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Related Work
Transaction Level Modeling Trade-Offs
figure according to: “Transaction Level Modeling – An Abstraction Beyond RTL”, L. Maillet-Contoz and F. Ghenassia, Springer, 2005
TLM-CA
Functional
Model
TLM-PVT
untimed approximately
timed
cycle
accurate
application
packet
bus packet
bus word
Timing Accuracy
Data Granularity
TLM-PV
TLM-PVT
?! Fixed Data Granularity and
cooperative multitasking
limits Timing Accuracy
16
RTL

Allows variable data granularity to achieve cycle accuracy
Based on Temporal Decoupling for high simulation speed
Resources contain Temporal Decoupled Semaphores (TDSem)
managing resource accesses
CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling
Solution: Advanced Temporal Decoupling
Master 1 Master 2
Thread 1 Thread 2
Slave 1 Slave 2
Bus = 50ns
Temporal Decoupled
Semaphores (TDSem)
use look-a-head to determine potential future preemptions
17

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Content
Context
Transaction Level Modeling
Advanced Temporal Decoupling (ATD)
Case Study “Night Vision“
Conclusion
18

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling – Concept
Shared Resource Access (SRA) creation phase execute runable simulation threads in temporal decoupled manner
threads register SRAs at corresponding TDSems without processing them
suspend threads at predefined synchronization points
ATD simulation course: two alternating phases
Thread 1 Thread 2 global simulation time
remains constant
synchronization points
(wait for resume event)
registered and unprocessed SRAs
19

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling – Concept
Synchronization Points
Temporal decoupling has to stop if data dependencies would be violated
remark: Synchronization Points are integrated into TTLM library components
instructions not necessarily comprising data dependency write access to external resource considering error type conversion*)
write access to local volatile variable
occurrence of interrupts
*) see “Abstract Modeling of Communication Errors in Cyber-Physical Systems using uPN” ,
S. Hufnagel, N. Bannow, C. Grimm, J. Ou, MBMV 2012 for details on error type conversion
Synchronization Point remarks
Read access from external resource
Read access from local volatile variable
Access to simulation time In case there are pending resource accesses
Notification of and wait for user events In case there are pending resource accesses
20

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling – Concept
1. check if there are pending SRAs within “sc_time_to_pending_activity()”
2. select next SRA
3. calculate time budget
Shared Resource Access execution phase
Thread 1 Thread 2
sc_time_to_pending_activity()
next SRA
time budget
1. 2.
3.
21

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling – Concept
4. (partially) execute next SRA considering time budget
5. delay related and/or conflicting SRAs and synchronization points
Shared Resource Access execution phase (cont’d)
Thread 1 Thread 2
next SRA
Thread 1 Thread 2
4.
2 words
Thread 1 Thread 2
5.
2 words
22

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling – Concept
6. repeat steps 1 to 5 until there are no pending SRAs within
“sc_time_to_pending_activity()”
7. advance global simulation time and continue with next SRA creation phase
Shared Resource Access execution phase (cont’d)
7.
…
Thread 1 Thread 2 Thread 1 Thread 2
6.
2 words 2 words
3 words 3 words
Thread 1 Thread 2
2 words
1 word
3 words
23
incorporation of user defined scheduler delay of conflicting low priority SRA

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling
Speedup ≥ 2,5x (larger transaction size larger speedup)
Simulation accuracy equals cycle accurate model
Simple TLM example performance evaluation
332k
835k940k
0k100k200k300k400k500k600k700k800k900k
1000k
TLM-CA ATD sync after each application
packet
ATD sync after 10 application
packets
Transactions / s
24

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling
synchronous and asynchronous resource accesses
preemptable and non-preemptable resource accesses
Features
Resource Thread Resource Thread
sync async
Resource Thread 1 Thread 2
preemptable low priority resource access is
interrupted by high priority access
non-preemptable low priority resource access
defers execution of high priority access
Resource Thread 1 Thread 2
low prio high prio
low prio
high prio
25

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling
supported resource properties: interacting resources
multiport resources
dynamic access priorities
user specified scheduler for simultaneous resource accesses
generation of profiling information resource utilization ratio
minimum interaction matrix
…
Features (cont’d)
Res. 1 Thread Res. 2
26
…

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling – Implementation
Facts each SRA has exactly one source (thread / superior SRA)
each thread / SRA might have an arbitrary amount of pending SRAs
SRA registration might happen out-of-order (temporal decoupling)
each SRA is associated to exactly one resource
actual SRA execution might differ from model semantics
related SRAs influence each other
Implementation: SRA Tree for inter-SRA-dependencies
SRA Matrix for resource conflict detection
SRA Management
27

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling – Implementation
One SRA Tree per thread
Arbitrary amount of pending SRAs per thread / parent SRA
SRA Tree for inter-SRA dependencies
completed
SRAspending SRAs
active SRA
async SRA sync SRA
iTh thread = root
level = 1
level = 2
simulated time
level = 0
ns
i
t
Th SRA 1ns
i
t
Th SRA 2ns
i
t
Th SRA
1s
nst
iTh
t
SRASRA 1
1
s
nst
iTh
t
SRASRA
2
1
s
nst
iTh
t
SRASRA
28

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling – Implementation
SRA Matrix for resource contention detection
dynamic Threads...
ji TDSemTh SRA
SRAiTh
0Th 1Th 2Th iTh
0TDSem
1TDSem
jTDSem
Th
TDSem
jTDSemSRA
29

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling
ATD provides dynamic Data Granularity
figure according to: “Transaction Level Modeling – An Abstraction Beyond RTL”, L. Maillet-Contoz and F. Ghenassia, Springer, 2005
TLM-CA
TLM-PVT
untimed approximately
timed
cycle
accurate
application
packet
bus packet
bus word
Timing Accuracy
Data Granularity
TLM-PV ATD
30
Functional
Model
TLM-PVT
RTL

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Advanced Temporal Decoupling
31
ATD Usage
Initiators remain unchanged (exception: synchronization points)
integrate TDSem into resources …
… having multiple target ports
… allowing asynchronous accesses
TDSem not needed for cascaded single port resources allowing
synchronous accesses only
pass transaction to TDSem within TLM (n)b_transport call
implement SRAExecution_if which gets called to process the
transaction

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Content
Context
Transaction Level Modeling
Advanced Temporal Decoupling (ATD)
Case Study “Night Vision“
Conclusion
32

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Case Study “Night Vision“
Night Vision
33
automotive driver assistance application
improves obstacle visibility at night
based on advanced video processing algorithms

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Case Study “Night Vision“
complete representation of Night Vision video computation system
(HW architecture, video algorithms, …)
cycle accurate implementation
runs original Night Vision video algorithms
based on SystemC with “Module-Adapter“ extension*)
*) see “Modeling and Optimization of a Multiprocessor Control Unit using SystemC” , PhD thesis N. Bannow, 2009
34
Model properties of existing virtual prototype

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Case Study “Night Vision“
Model structure and dataflow
Source: „Modeling and Optimization of a Multiprocessor Control Unit using SystemC“, PhD thesis N. Bannow, 2009
1. frame transfer from
camera
2. DMA based transfer
to uC buffer
3. frame processing by
NV algorithms
4. DMA based transfer
back to FPGA buffer
5. output on display
35

simulation runtime improvement: ~5x
delta cycle count reduction: ~20x
simulation accuracy equals cycle accurate model
further improvements possible, if abstracted software model is used
CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Case Study “Night Vision”
Night Vision evaluation results
35716086
1925626
0
5000000
10000000
15000000
20000000
25000000
30000000
35000000
40000000
CA NV model ATD based NV model
# of delta cycles / frame11,02 s
2,42 s
0,00 s
2,00 s
4,00 s
6,00 s
8,00 s
10,00 s
12,00 s
CA NV model ATD based NV model
simulation runtime / frame
36

CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Content
Context
Transaction Level Modeling
Advanced Temporal Decoupling (ATD)
Case Study “Night Vision“
Conclusion
37

Advanced Temporal Decoupling …
… enables cycle accuracy in context of temporal decoupling automatic execution order preserving management of resource contention effects
time budget calculation for dynamic data granularity
simple TLM-LT like user API
… improves simulation performance of TLM-CA models speed up ~5x in industrial simulation model
TLM-CA simulation accuracy is retained
… can be used in conjunction with TTLM methodology model structure: TTLM library + TTLM generator
simulation performance + accuracy: Advanced Temporal Decoupling
synchronization points integrated into TTLM library elements
CR/AEH2-Hf | 2013/03/22 | AE2-1094 | © Robert Bosch GmbH 2013. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung,
Reproduktion, Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Summary
38

CR/AEH2-Hf | 2013/03/22 | © Robert Bosch GmbH 2012. Alle Rechte vorbehalten, auch bzgl. jeder Verfügung, Verwertung, Reproduktion,
Bearbeitung, Weitergabe sowie für den Fall von Schutzrechtsanmeldungen.
Thanks for your attention!
Questions ??
39







