

LabVIEW Robotics:Sense-Think-Act
Jochen Klier
Application Engineer National Instruments

Agenda
• Robotic applications
• A typical robotic system architecture
– Sense
– Think
– Act
• LabVIEW Robotics 2009

A Robot Platform for every Age and Application
Powered by LabVIEW
LEGO ® WeDo®
powered by LabVIEW
LEGO ® MINDSTORMS® NXTpowered by LabVIEW
NI LabVIEW
NIWorldClass
Types of Robots
• Fixed-base robots
• Mobile robots(tele-operated)
• Autonomous vehicles and systems

Vision Guided Motion
Application
Pick and place parts of different sizes and
orientations
Challenges
Multiple domains of expertise need to be addressed
Key benefits
Integration of Robot Control and Vision in a single
development environment
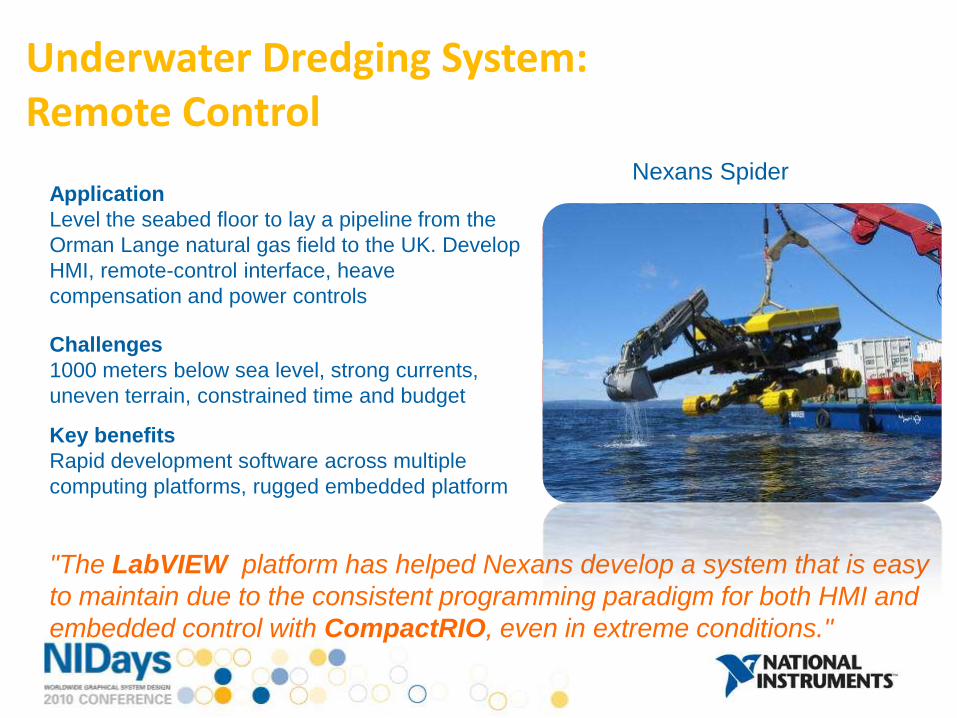
"The LabVIEW platform has helped Nexans develop a system that is easy
to maintain due to the consistent programming paradigm for both HMI and
embedded control with CompactRIO, even in extreme conditions."
Application
Level the seabed floor to lay a pipeline from the
Orman Lange natural gas field to the UK. Develop
HMI, remote-control interface, heave
compensation and power controls
Challenges
1000 meters below sea level, strong currents,
uneven terrain, constrained time and budget
Key benefits
Rapid development software across multiple
computing platforms, rugged embedded platform
Underwater Dredging System: Remote Control
Nexans Spider
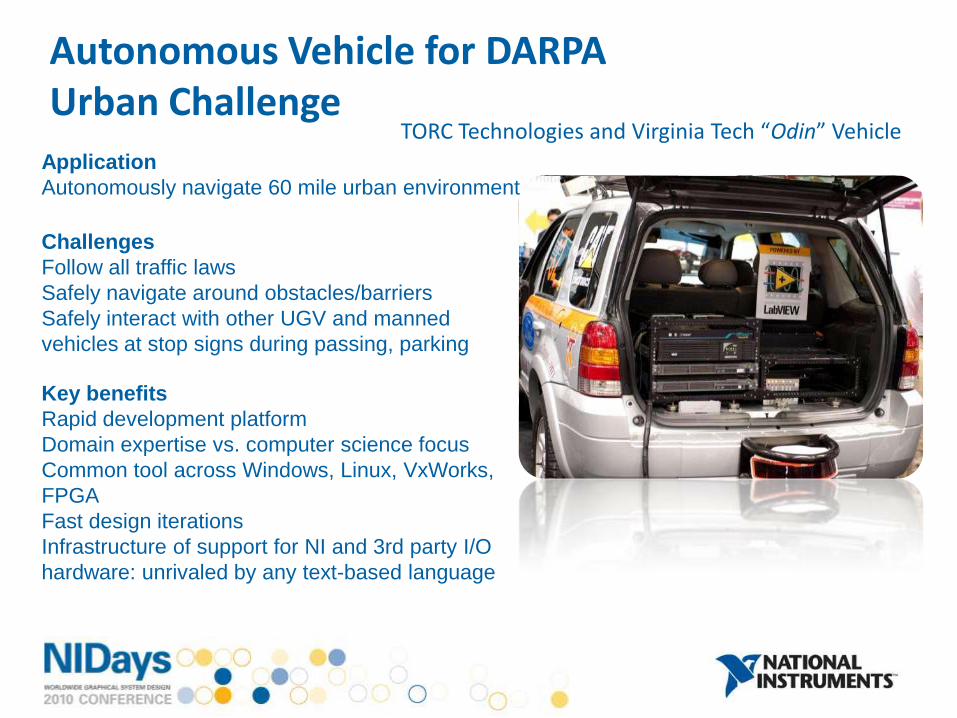
Autonomous Vehicle for DARPAUrban Challenge
TORC Technologies and Virginia Tech “Odin” Vehicle
Application
Autonomously navigate 60 mile urban environment
Challenges
Follow all traffic laws
Safely navigate around obstacles/barriers
Safely interact with other UGV and manned
vehicles at stop signs during passing, parking
Key benefits
Rapid development platform
Domain expertise vs. computer science focus
Common tool across Windows, Linux, VxWorks,
FPGA
Fast design iterations
Infrastructure of support for NI and 3rd party I/O
hardware: unrivaled by any text-based language

A typical Robotic System Architecture
• Data acquisition
• Filtering
• Perception
Sense
• Navigation
• Localization
• Decision making
Think• Locomotion
• Kinematics
• Motor control
Act

think
actsense

Sensors
Infrared (IR) Sensors
CMOS Sensor
Radar
Inertial Measurement Unit
Optical Encoders
Global Positioning System
Stereo Vision
LIDAR
think
actsense

High Definition Lidar HDL-64E Sensor
think
actsense
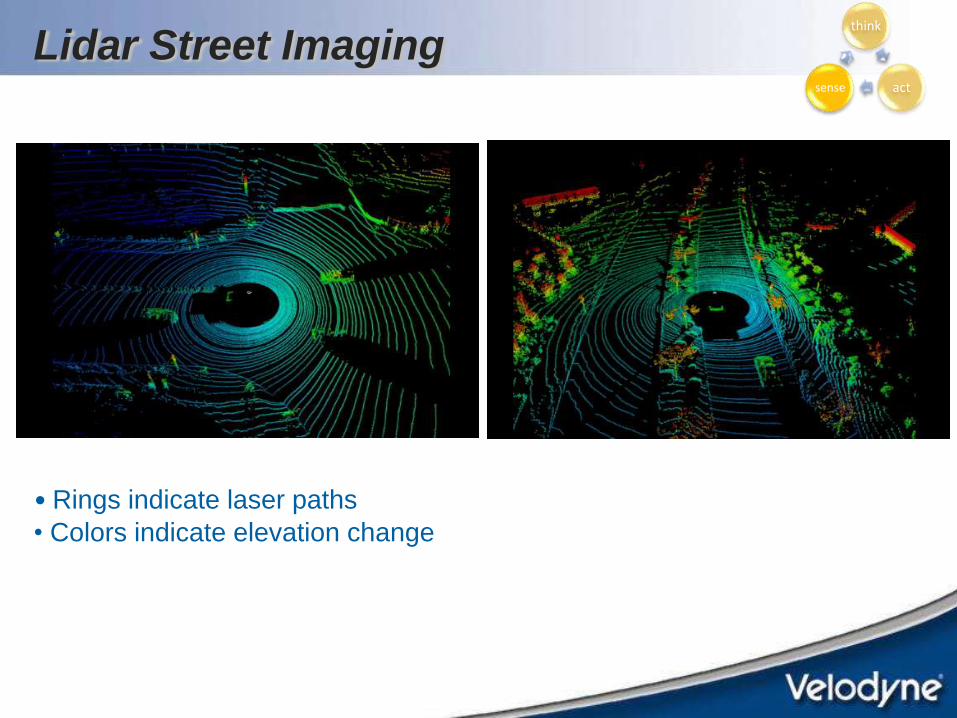
• Rings indicate laser paths
• Colors indicate elevation change
Lidar Street Imagingthink
actsense

think
actsense

Planning and Navigation
Autonomous Map Building
Localization
Machine Learning
Think
think
actsense
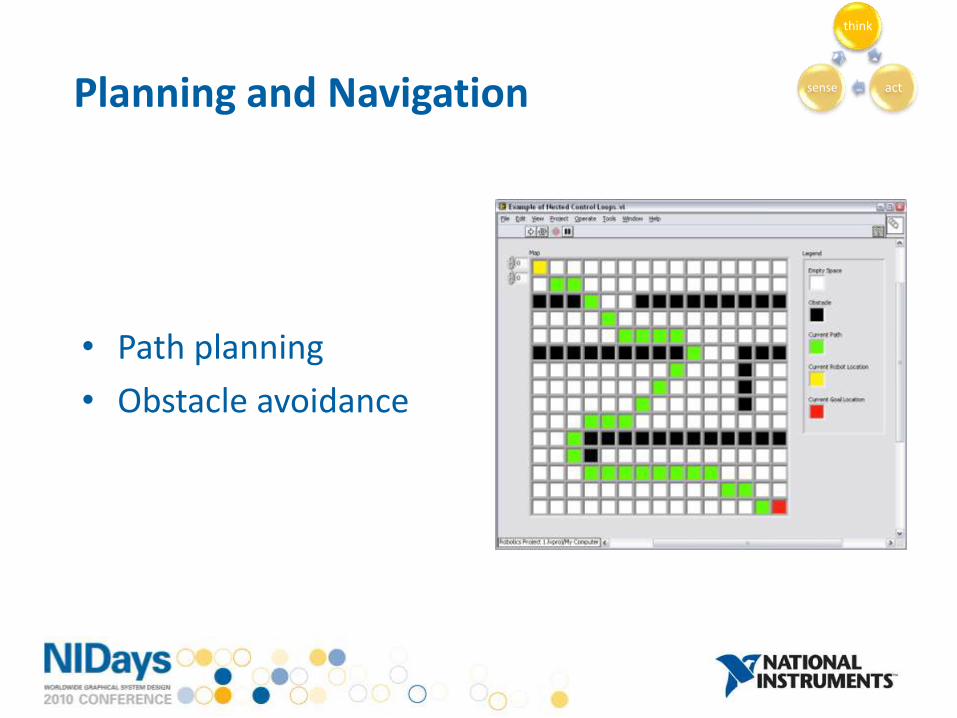
Planning and Navigation
• Path planning
• Obstacle avoidance
think
actsense

Urban Challenge – Map and Sensor Data Fusion
think
actsense

think
actsense
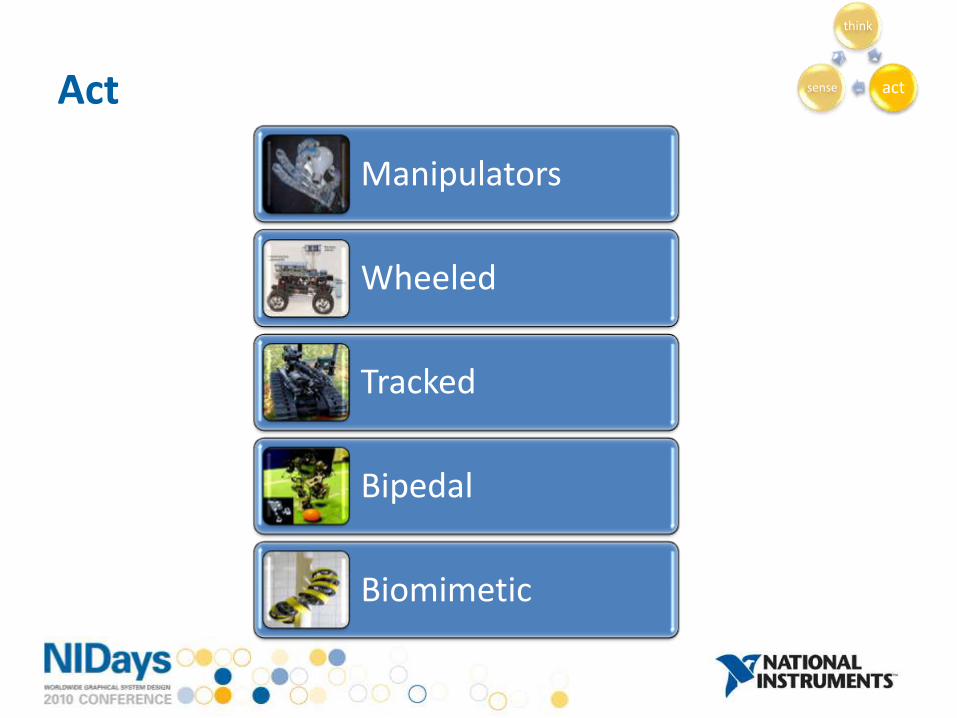
Act
Manipulators
Wheeled
Tracked
Bipedal
Biomimetic
think
actsense

Motors + Drives
maxonmotor.com
think
actsense
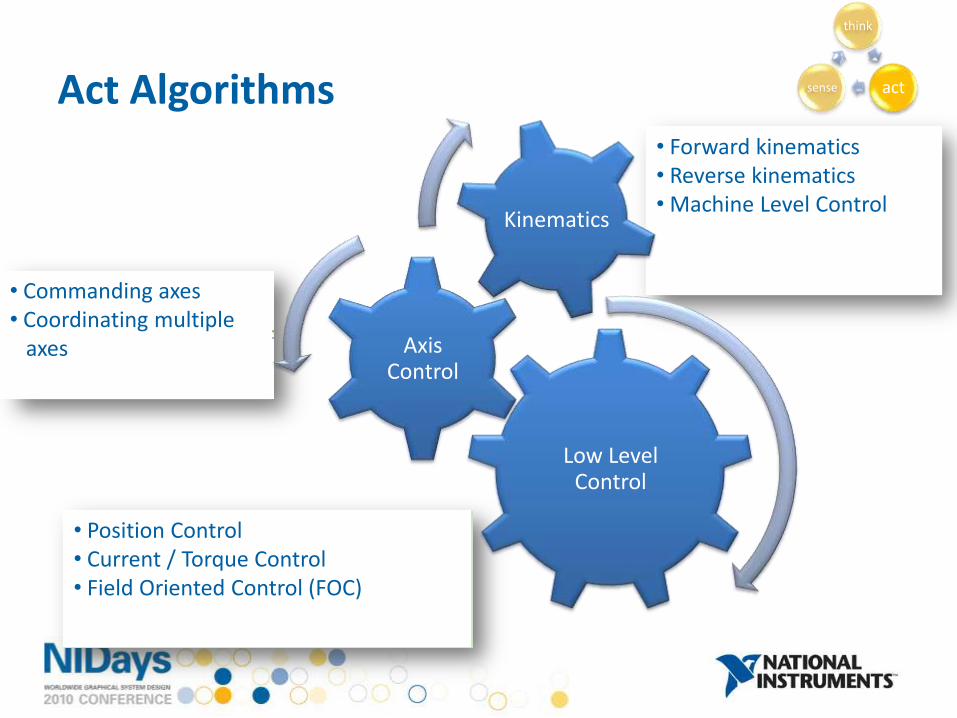
Act Algorithms
think
actsense
• Forward kinematics• Reverse kinematics• Machine Level Control
Low Level Control
Axis Control
Kinematics
• Commanding axes • Coordinating multiple
axes
• Position Control• Current / Torque Control• Field Oriented Control (FOC)
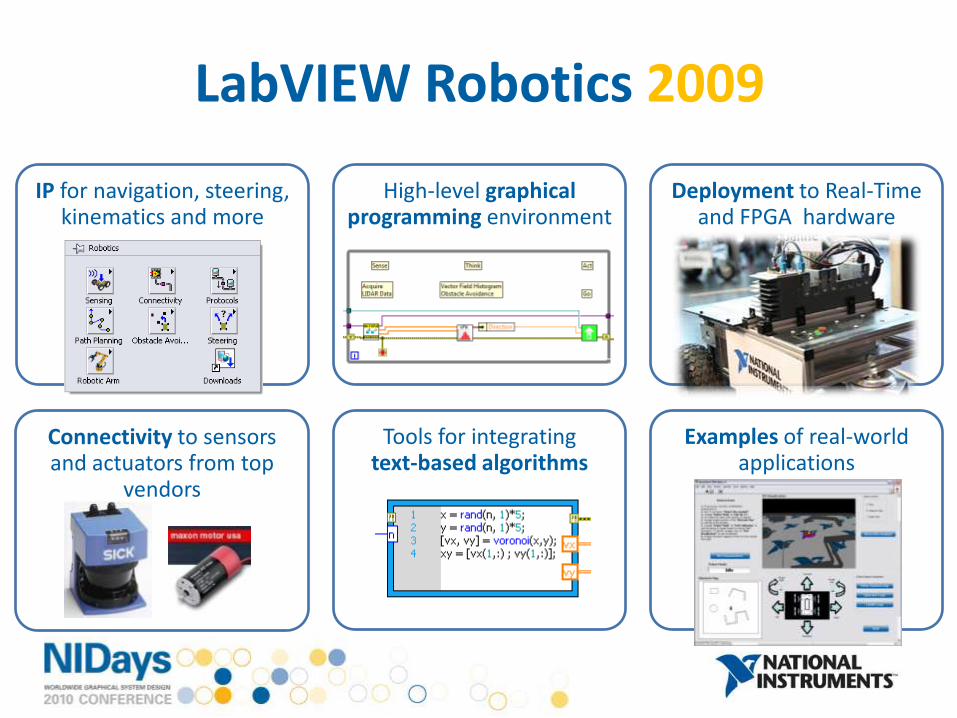
LabVIEW Robotics 2009
IP for navigation, steering, kinematics and more
High-level graphical programming environment
Tools for integrating text-based algorithms
Deployment to Real-Time and FPGA hardware
Examples of real-world applications
Connectivity to sensors and actuators from top
vendors
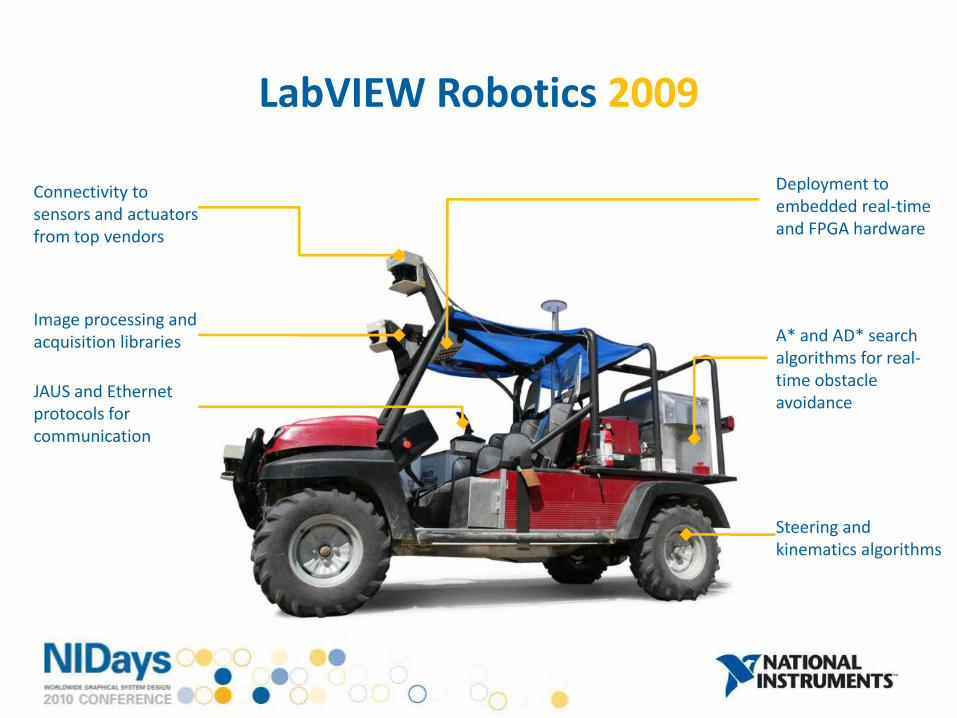
Connectivity to sensors and actuators from top vendors
Image processing and acquisition libraries
JAUS and Ethernet protocols for communication
Deployment to embedded real-time and FPGA hardware
Steering and kinematics algorithms
A* and AD* search algorithms for real-time obstacle avoidance
LabVIEW Robotics 2009

LabVIEW Robotics 2009 Software BundleLa
bV
IEW
Mo
du
les • LabVIEW Real-Time
• LabVIEW FPGA
• LabVIEW MathScript RT
• LabVIEW Control Design and Simulation
• LabVIEW Statechart
• NI Vision Development Module
• LabVIEW NI SoftMotion
• PID Control Toolkit
• LabVIEW System Identification Toolkit
Ro
bo
tics
IP a
nd
Ex
amp
les • Sensor and Actuator
Drivers
• Path Planning
• Obstacle Avoidance
• Steering
• Kinematics
• Communication Protocols
• Connectivity to Third-Party Software
• Motion
• Vision
• Control and Simulation

NI Single-Board RIO
•Board-level embedded controller •Integrated FPGA and real-time processor•Built-in analog and digital I/O, can be expanded with I/O modules
NI CompactRIO
•Embedded controller with rugged, mechanical enclosure•Integrated FPGA and real-time processor•Includes modules for robotics-specific I/O
NI Robot Starter Kit
•Robot kit based on NI Single-Board RIO•Includes ultrasonic sensor, motors, encoders, battery, and charger•Performs basic obstacle avoidance out of the box
Questions?
ni.com/robotics







