
4 State-space solutions and realizations
• 4.2 Solutions of LTI State EquationsConsider
• Premultiplying on both sides of first yields
• Implies
⎩⎨⎧
+=+=
)t(Du)t(Cx)t(y)t(Bu)t(Ax)t(x&
Ate−
)t(Bue)t(Axe)t(xe AtAtAt −−− =−&)t(Bue))t(xe(
dtd AtAt −− =
• Its integration from 0 to t yields
• Thus, we have
• The final solution
• Compute the solutions by using Laplacetransform
τ∫ τ=τ τ−=τ
− d)(Bue)(xe t0
At0
At
τ∫ τ+= τ− d)(Bue)0(xe)t(x t0
)t(AAt
)t(Dud)(BueC)0(xCe)t(y t0
)t(AAt +τ∫ τ+= τ−
)]s(uB)0(x[)AsI()s(x 1 +−= −
)s(uD)]s(uB)0(x[)AsI(C)s(y 1 ++−= −
• Three methods of computing1. Using Theorem 3.5
f(λi) = h(λi) (where f(λi) = (s-λi)-1)2. Using Jordan form of A
Let A = QÂQ-1; then eAt = QeÂtQ-1
3. Using the infinite power series
• See Examples 4.1 and 4.2
Ate
∑=∞
=0k
kkAt At!k
1e
4.2.1 Discretization
• Because
• We can approximate a LTI system asx(t+T) = x(t) + Ax(t)T + Bu(t)T
• The discrete-time state-space equation
T)t(x)Tt(xlim)t(x
0T
−+=
→&
)kT(TBu)kT(x)TAI()T)1k((x ++=+)kT(Du)kT(Cx)kT(y +=

• Computing the first at t = kT and t = (k+1)T yields
• Let α = kT + T - τ. Then, we have
• The continuous-time state equation becomes
∫ ττ+== τ−kT0
)kT(AAkT and d)(Bue)0(xe)kT(x:]k[x
∫ ττ+=+=+ + τ−++ T)1k(0
)T)1k((AT)1k(A d)(Bue)0(xe)T)1k((x:]1k[x
∫ α+=+ αT0
AAT ]k[Bude)k(xe]1k[x
]k[uB]k[xA]1k[x dd +=+
]k[uD]k[xC]k[y dd +=
D DCC B)de( BeA with ddT0
Ad
ATd ==∫ τ== τ
• If A is nonsingular,Bd = A-1(Ad - I)B
• 4.2.2 Solution of Discrete-Time Equations• Consider
x[k+1] = Ax[k] + Bu[k]y[k] = Cx[k] +Du[k]
• Computex[1] = Ax[0] + Bu[0]x[2] =Ax[1]+Bu[1]=A2x[0]+ABu[0]+Bu[1]

• Proceeding forward, for k > 0,
• Key computationAk = QÂkQ-1
• Suppose the Jordan form of A is
∑+=−
=
−−1k
0m
m1kk ]m[BuA]0[xA]k[x
∑ ++=−
=
−−1k
0m
m1kk ]k[Du]m[BuCA]0[xCA]k[y
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
λλ
λλ
λ
=
2
1
1
1
1
00000000000000100001
A1
k2
k1
k1
k1
k1
2k1
k1
k1
k Q
00000000000000k0002/)1k(kk
QA −
−
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
λλ
λλλλ−λλ
=
4.3 Equivalent state Equations
• Definition 4.1 Let P be an n×n real nonsingular matrix and Let = Px. Then the state equation,
where is said to be equivalent to 4.24 and = Pxis called an equivalence transformation.
x
)t(uB)t(xA)t(x +=&
)t(uD)t(xC)t(y +=DD CPC PBB PAPA -11 ==== −
x
• Equivalent state equations have the same characteristic polynomial and consequently, the same set of eigenvalues and same transfer matrix.
• Theorem 4.1 Two LTI state equations {A, B, C, D} and are zero-state equivalent or have the same transfer matrix if and only if and m = 0, 1, 2, ...
}D ,C ,B ,A{
DD = BACBCA mm =
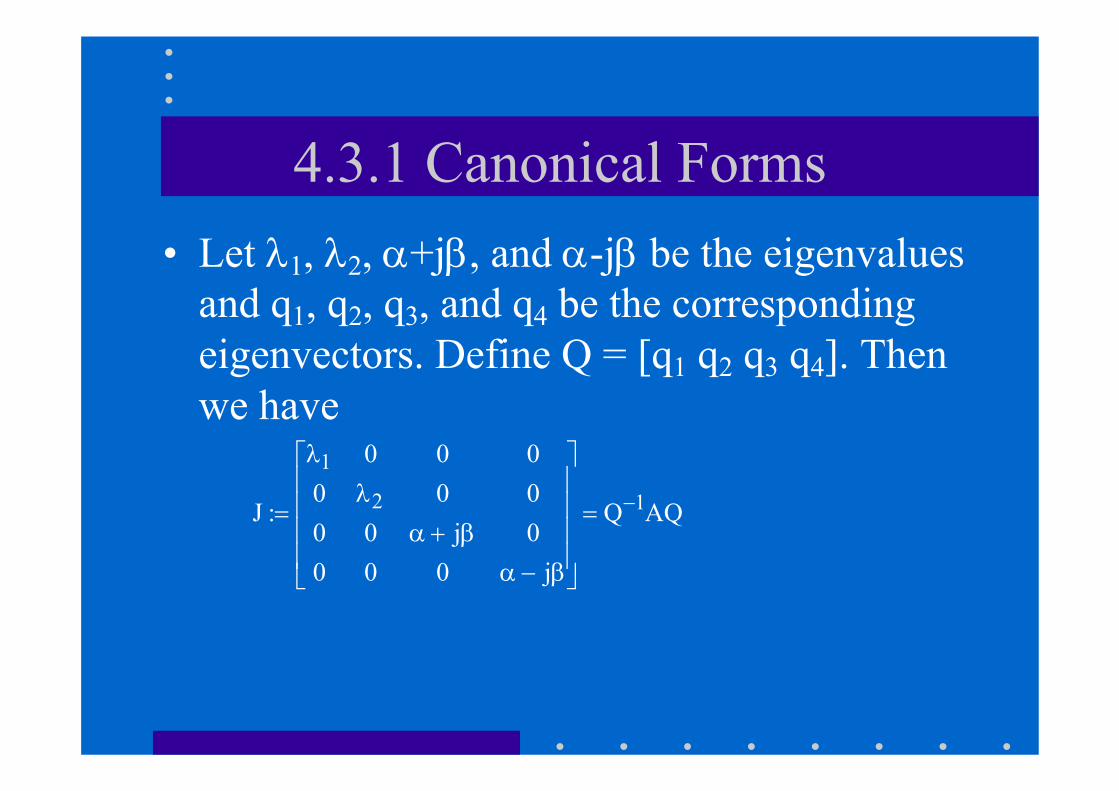
4.3.1 Canonical Forms• Let λ1, λ2, α+jβ, and α-jβ be the eigenvalues
and q1, q2, q3, and q4 be the corresponding eigenvectors. Define Q = [q1 q2 q3 q4]. Then we have
AQQ
j0000j00000000
:J 12
1
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
β−αβ+α
λλ
=
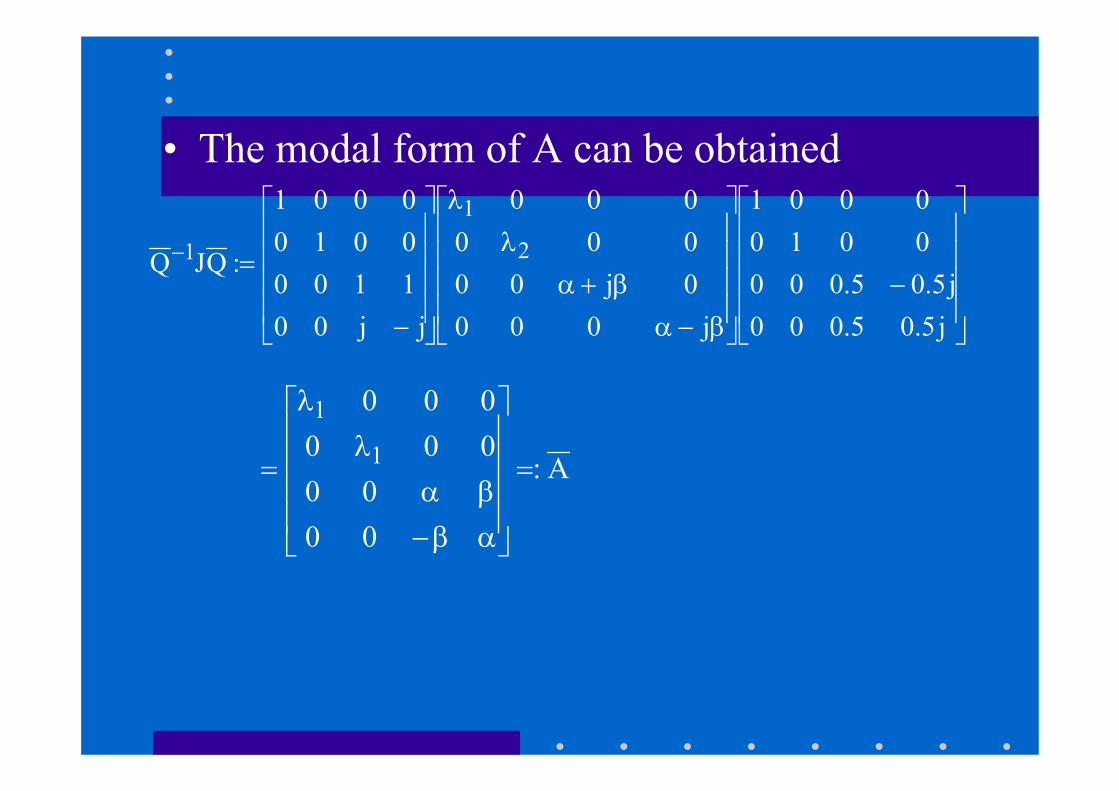
• The modal form of A can be obtained
A:
0000
000000
1
1
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
αβ−βα
λλ
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
β−αβ+α
λλ
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
=−
j5.05.000j5.05.000
00100001
j0000j00000000
jj00110000100001
:QJQ 2
1
1
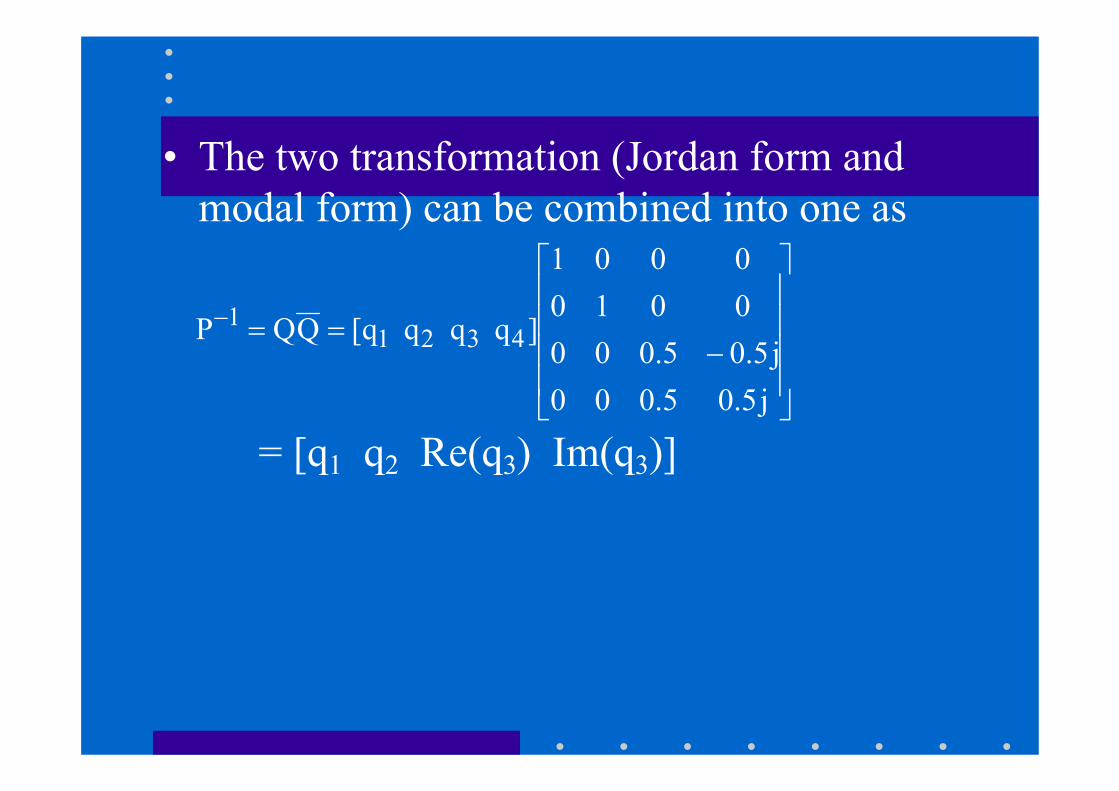
• The two transformation (Jordan form and modal form) can be combined into one as
= [q1 q2 Re(q3) Im(q3)]
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−==−
j5.05.000j5.05.000
00100001
]q q q q[QQP 43211
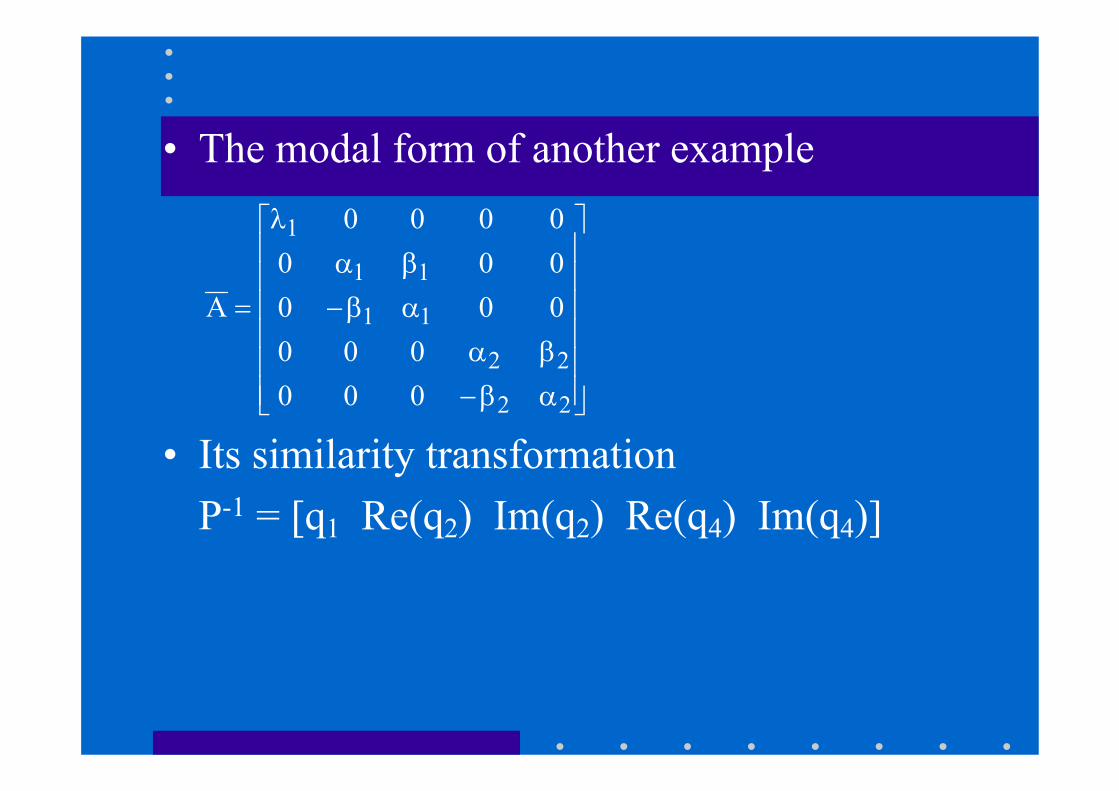
• The modal form of another example
• Its similarity transformationP-1 = [q1 Re(q2) Im(q2) Re(q4) Im(q4)]
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
αβ−βα
αβ−βα
λ
=
22
22
11
11
1
000000
0000000000
A
4.4 Realizations
• The realization problem: given the input-output description of a LTI system
finding its state-space equation),s(u)s(G)s(y =
)t(Bu)t(Ax)t(x +=&
)t(Du)t(Cx)t(y +=
• A transfer matrix Ĝ (s) is said to be realizable if there exist a finite-dimensional state equation, or simply, {A, B, C, D} such that Ĝ (s) = C(sI -A)-1B + D
• Theorem 4.2 A transfer matrix Ĝ (s) is realizable if and only if Ĝ (s) is a proper rational matrix.
B)AsI(CD)s(G)(G)s(G 1sp
−−+=+∞=
B)]AsI(Adj[C)AsIdet(
1D −−
+=
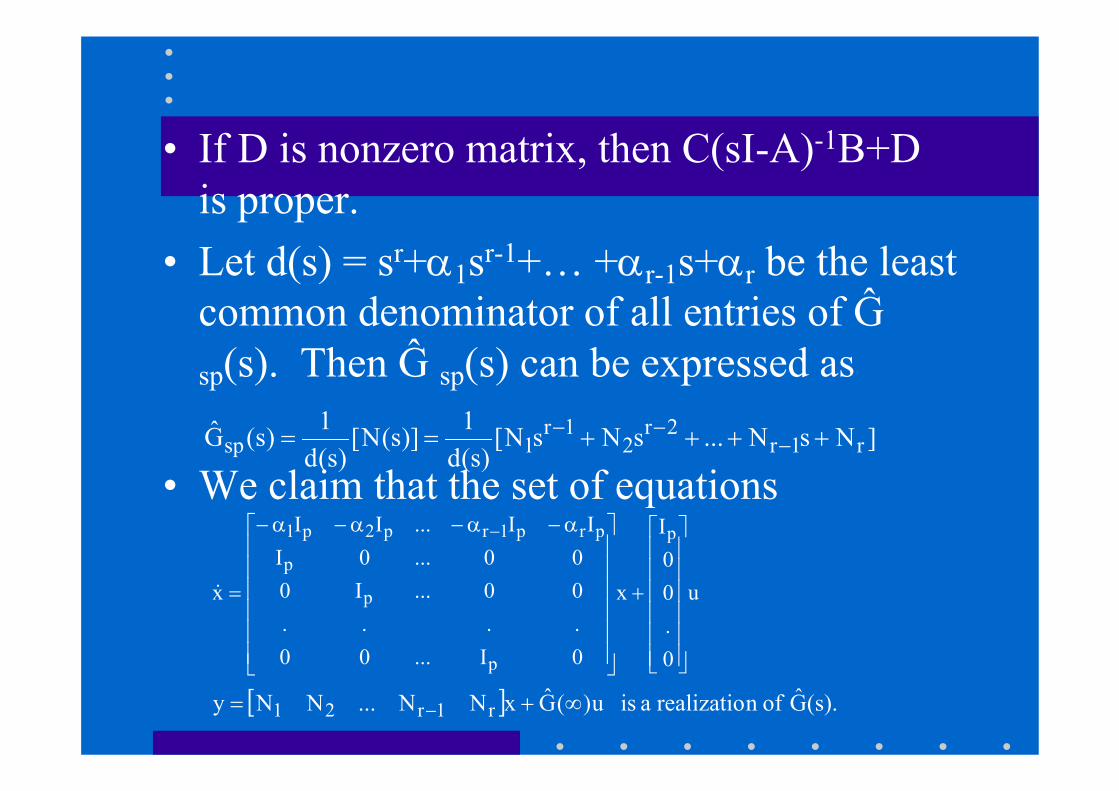
• If D is nonzero matrix, then C(sI-A)-1B+D is proper.
• Let d(s) = sr+α1sr-1+… +αr-1s+αr be the least common denominator of all entries of Ĝsp(s). Then Ĝ sp(s) can be expressed as
• We claim that the set of equations]NsN...sNsN[
)s(d1)]s(N[
)s(d1)s(G r1r
2r2
1r1sp ++++== −
−−
u
0.00I
x
0I...00....00...I000...0I
II...II
x
p
p
p
p
prp1rp2p1
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡ α−α−α−α−
=
−
&
[ ] (s).G of nrealizatioa is u)(GxNN...NNy r1r21 ∞+= −

4.5 Solution of Linear-time varying (LTV) Equations
• Consider
• Assume that every entry of A(t) is a continuous function of t.
• First discuss the solutions of
)t(u)t(B)t(x)t(A)t(x +=&
)t(u)t(D)t(x)t(C)t(y +=
)t(x)t(A)t(x =&
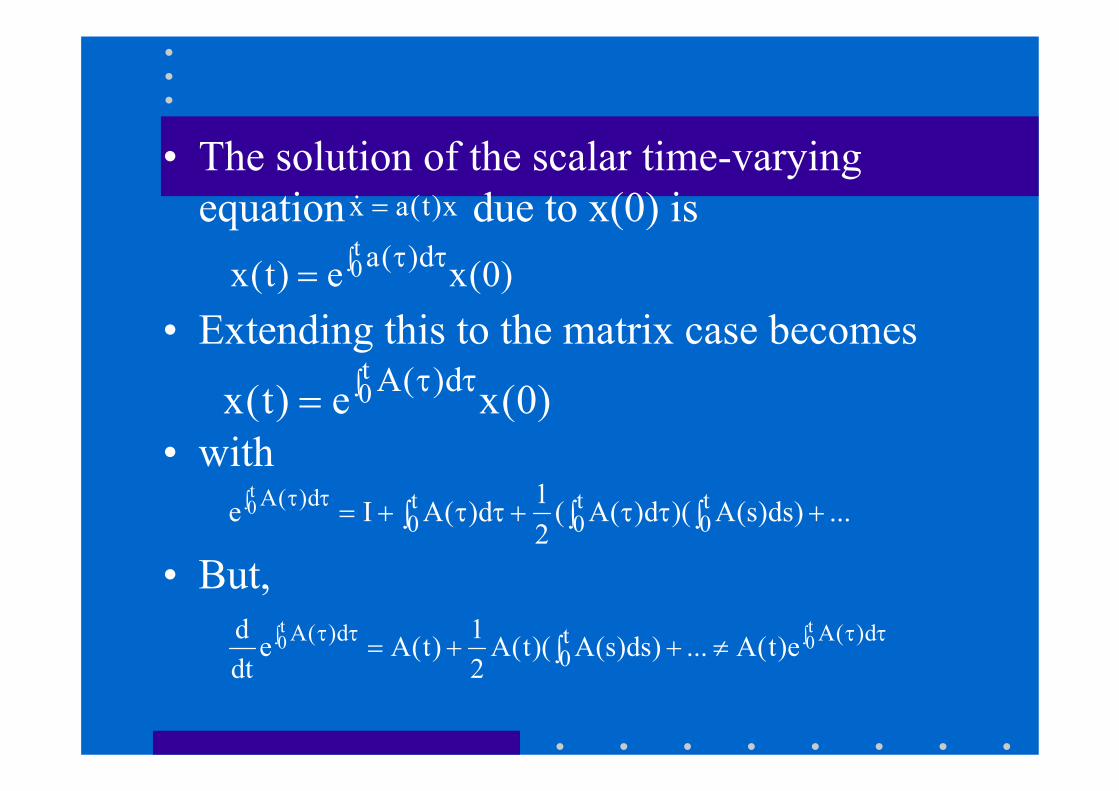
• The solution of the scalar time-varying equation due to x(0) is
• Extending this to the matrix case becomes
• with
• But,
x)t(ax =&
)0(xe)t(xt0 d)(a∫ ττ=
)0(xe)t(xt0 d)(A∫ ττ=
...)ds)s(A)(d)(A(21d)(AIe t
0t0
t0
d)(At0 +∫∫ ττ+∫ ττ+=∫ ττ
∫∫ ττττ ≠+∫+=t0
t0 d)(At
0d)(A e)t(A...)ds)s(A)(t(A
21)t(Ae
dtd
• Arranging n solutions as X = [x1 x2 … x3], we have
• If X(t0) is nonsingular or the initial states are linearly independent, then X(t) is called a fundamental matrix
• See example 4.8
)t(X)t(A)t(X =&
)t(x)t(A)t(x =&
• Definition 4.2 Let X(t) be any fundamental matrix of . Then
is called the state transition matrix ofThe state transition matrix is also the unique solution of
with the initial condition Φ(t0, t0) = I.
)t(x)t(A)t(x =&
)t(X)t(X:)t,t( 01
0−=Φ
)t(x)t(A)t(x =&
)t,t()t(A)t,t(t 00 Φ=Φ∂∂
• The important properties of the state transition matrix:Φ(t, t) = IΦ-1(t,t0)=[X(t)X-1(t0)]-1=X(t0)X-1(t)=Φ(t0,t)
• See example 4.9• We claim that the solution of the LTV
system∫ ττττΦ+Φ= tt00 0
d)(u)(B),t(x)t,t()t(x]d)(u)(B),t(x)[t,t( t
t 000 0∫ ττττΦ+Φ=
)t(u)t(Dd)(u)(B),t()t(Cx)t,t()t(C)t(y tt00 0
+∫ ττττΦ+Φ=
• The zero-input responsex(t) = Φ(t, t0)x0
• The zero-state response
• The impulse response matrix
)t(u)t(Dd)(u)(B),t()t(C)t(y tt0
+∫ ττττΦ=
τττ−δ+∫ ττττΦ= d)(u)]t()t(Dd)(u)(B),t()t(C[tt0
)t()t(D)(B),t()t(C),t(G τ−δ+ττΦ=τ
)t()t(D)(B)(X)t(X)t(C 1 τ−δ+ττ= −
4.5.1 Discrete-Time case
• Consider the discrete-time state equationx[k+1] = A[k]x[k] +B[k]u[k]y[k] = C[k]x[k] + D[k]u[k]
• As in the continuous-time case, the discrete state transition matrixΦ[k+1, k0] = A[k]Φ[k, k0]with Φ[k0, k0] = I.
• Its solution can be obtained directly asΦ[k, k0] = A[k-1]A[k-2]… A[k0]
• The solution of the discrete-time system
• The impulse responseG[k,m]=C[k]Φ[k,m+1]B[m]+D[m]δ[k-m]
∑ +Φ+Φ=−
=
1k
km00
0
]m[u]m[B]1m,k[x]k,k[]k[x
]k[u]k[D]m[u]m[B]1m,k[]k[Cx]k,k[]k[C]k[y1k
km00
0
+∑ +Φ+Φ=−
=
4.6 Equivalent Time-Varying Equations
• The state equation
where
is said to be equivalent to (4.69) and P(t) is called equivalent transformation.
• P(t)X(t) is also a fundamental matrix.
u)t(B)t(x)t(Ax +=&
u)t(Dx)t(Cy +=
)t(P)]t(P)t(A)t(P[)t(A 1−+= &
)t(B)t(P)t(B =)t(P)t(C)t(C 1−=
)t(D)t(D =
• Theorem 4.3 Let A0 be an arbitrary matrix. Then there exists an equivalence transformation that transforms (4.69) into (4.70) with
• Periodic state equation:A(t+T) = A(t)
• Then,
• Thus X(t+T) is also a fundamental matrixX(t+T) = X(t)X-1(0)X(T)
.0A)t(A =
)Tt(X)t(A)Tt(X)Tt(A)Tt(X +=++=+&
• Let Q = X-1(0)X(T) be a constant nonsingular matrix.
• There exists a constant matrix such that (Problem 3.24).
• Thus
• Define
• Note that P(t) is periodic with period T
A
Qe TA =
TAe)t(X)Tt(X =+
)t(Xe:)t(P 1TA −=
• Theorem 4.4 Consider (4.69) with A(t) = A(t+T) for all t and some T > 0. Let X(t) be a fundamental matrix. Let be the constant matrix. Then (4,69) is Lyapunovequivalent to
where
A
)t(u)t(B)t(P)t(xA)t(x +=&
)t(u)t(D)t(x)t(P)t(C)t(y 1 += −
)t(Xe)t(P 1TA −=
4.7 Time-Varying Realizations
• Theorem 4.5 A q×p impulse response matrix G(t, τ) is realizable if and only if G(t, τ) can be decomposed as G(t, τ)=M(t)N(τ) + D(t)δ(t - τ)







