

Abstract A series of vehicle‐based driving maneuvers was performed, where occupants in the passenger
position were subjected to emergency braking maneuvers at 12 km/h and 50 km/h, lane change maneuvers to the left and the right and combined maneuvers, where a combination of lateral and frontal accelerations occurred. A comprehensive collection of vehicle and occupant kinematic corridors based on results from 6 female (mass: 63.0±10.4 kg, height: 169.0±4.1 cm, age: 31.5±9.3 y) and 19 male (mass: 77.8±8.4 kg, height: 178.2±5.0 cm, age: 28.2±3.8 y) subjects are presented.
Asymmetries in the response as well as the detailed kinematics are discussed for selected load cases, before results of various maneuvers are related to each other.
Keywords Combined maneuver, emergency braking, lane change maneuver, low g vehicle test, occupant kinematics
I. INTRODUCTION
In order to further improve vehicle safety and work towards the European Commission’s target of reducing the number of fatalities caused by traffic accidents by half in the decade between 2011 and 2020 [1] and finally arriving at the “vision zero” [2] promising path of active and integrated safety systems. Such systems need robust development tools, which are currently being devised. In contrast to the crash phase, where the occupant’s motion is predominantly determined by the body’s inertia and material behavior, in the pre‐crash phase also muscle‐induced movement has a significant influence on the kinematics. Active human body models are numerical simulation tools to describe this pre‐crash phase including active muscle contributions.
The human kinematic response in pre‐crash type loading conditions, i.e. acceleration in the order of 1 g, has been studied over the last decade, where two main classes of studies can be found in the literature, sled‐based studies and vehicle‐based tests. In a series of publications [3‐5] the biomechanical response of male and female subjects was studied during low‐speed sled tests in both frontal and lateral directions, reporting a considerable effect of the individual muscle contribution to the subject’s motion. In a follow‐up study [6] the effect of a motorized seat belt was shown to reduce the subjects’ forward motion. In [7] and [8] volunteers, post mortem human surrogates and a Hybrid III 50th percentile male anthropomorphic test device were subjected to sled accelerations with peak values of 2.5 g and 5 g, revealing qualitatively different biomechanical responses of the groups. Also the active bracing effect was studied for human subjects, which was found to significantly reduce the upper body forward excursion. In [9] lateral evasive maneuvers with a peak acceleration of 0.5 g were performed, where 10 subjects were restrained using a four‐point belt and both relaxed and braced conditions were reported.
Vehicle‐based studies of manual as well as autonomous braking of male and female subjects were performed in [10‐12], where also driver and passenger behavior was studied.
The work in [13‐14] can be considered as precursor to the present paper, where vehicle based emergency braking, lane change and combined maneuvers are presented. For a lap‐belt and rigid seat configuration between 20 and 22 subjects were reported, while for a combination of a three‐point belt and a seat with cushions and lateral support structures a preliminary subset of results was presented (emergency braking 12 km/h unaware: 4 female, 10 male; first repetition: 3 female, 6 male; 50 km/h: 4 female, 6 male; lane change to the left: 3 female, 2 male; right: 2 female, 2 male; combined maneuver to the left and right: 1 female, 3 male).
From the literature no results for oblique loading directions, i.e. maneuvers where subjects are accelerated in frontal and lateral directions, were found, neither for sled‐based tests, nor for vehicle‐based test. Also typical studies concentrated on a loading direction, where either loading conditions (e.g. peak acceleration) or subject
P. Huber is Lead Researcher, A. Prüggler and T. Steidl are Junior Researchers at Virtual Vehicle Research Center, Graz, Austria. S. Kirschbichler is Junior Researcher at the Vehicle Safety Institute at Graz University of Technology, Austria.
Passenger kinematics in braking, lane change and oblique driving maneuvers
Philipp Huber, Stefan Kirschbichler, Adrian Prüggler, Thomas Steidl
- 783 -
IRC-15-89 IRCOBI Conference 2015

preparation (e.g. braced or tensed, driver or passenger) were varied. In this study as well as in [13‐14] detailed 3D occupant kinematics of a large number of subjects is presented for five different loading directions in the first part of the paper. In the second part of the paper the occupant kinematics between the different load cases are addressed and also inter‐ and intra‐subject variability are discussed.
II. METHODS
A. Vehicle and maneuvers
On a closed test track three main types of maneuvers, emergency braking, lane change and combination of braking and steering were performed with subjects in the passenger position. A Mercedes‐Benz S‐500 (type: W221, width: 1.78 m, length: 5.23 m, wheelbase: 3.17 m, left‐hand drive, see Fig. 2) was used as test vehicle.
In the emergency braking maneuver (initial velocities of 12 km/h and 50 km/h, referred to as maneuvers Brake12_01 or Brake12_02 and Brake50_01 respectively, where the suffix 01 indicates that it was the first maneuver of this kind for the subject and the suffix 02 indicates the first repetition of the maneuver) the driver pressed the brake pedal at maximum effort, leading to a support by the vehicle’s brake‐assistant system. In the lane change maneuver to the right (LaneRight50) the driver initiated the maneuver by turning the steering wheel to the right by approximately 200° within typically 0.5 s followed by a counter steering action of around 360° within 0.7 s and a return movement to the neutral position. In the lane change maneuver to the left (LaneLeft50) similar actions, in the opposite direction, were performed. In both maneuvers the initial velocity was 50 km/h. In the combined maneuver the driver turned the steering wheel by approximately 220° within 0.6 s while simultaneously pressing the brake pedal at sufficient effort to activate the brake assistant system (CombinedLeft50 and CombinedRight50).
All test sequences started with an emergency braking maneuver at 12 km/h in order to allow a comparison to results in [13], where unaware subjects were tested using a lap belt only. All subsequent maneuvers (Brake12_02, Brake50_01, LaneRight50, LaneLeft50, CombinedLeft50 and CombinedRight50) were performed in random order.
The vehicle’s velocity (sample rate: 10 Hz), acceleration in frontal and lateral directions (50 Hz), steering wheel angel and associated angular velocity (100 Hz), yaw rate and brake pedal activation state (50 Hz) were recorded from the CAN Bus using a Dewetron Dewe 5000 system.
For braking and combined maneuvers the brake pedal state, indicating the initial brake pedal contact, was used to define the start of the maneuver referred to as t=0. In the lane change maneuvers a threshold value for the steering wheel angle of 20° was defined. At the time instance, where the threshold value was reached, the steering wheel angular velocity was used to extrapolate to the neutral steering wheel position. The corresponding time instance was defined as t=0 (see also [15]).
B. Subjects
Results from 6 female (mass: 63.0±10.4 kg, height: 169.0±4.1 cm, age: 31.5±9.3 y) and 19 male (mass: 77.8±8.4 kg, height: 178.2±5.0 cm, age: 28.2±3.8 y) subjects are presented in the study. All subjects gave written informed consent after written and verbal explanation of the test procedure. No specifics about the driving maneuvers were given other than that only maneuvers that can be encountered in normal driving were done. The subjects held a valid driving license for the operation of a passenger vehicle. Subjects were instructed to relax and sit in a comfortable passenger position. The test procedure was reviewed and approved by the ethics committee at the Medical University of Graz. Some trials had to be excluded due to bad data quality. Therefore the anthropometric properties for the subset of valid trials per maneuver are presented in Table 1.
TABLE I PARAMETERS OF THE MANEUVER AND SUBJECT PROPERTIES
maneu
ver
velocity
[km/h]
#subjects
#male
#fem
ale
height [cm]
mean
±std.dev.
weight [kg]
mean
±std.dev.
Brake12_01 12 25 19 6 176.0±6.1 74.7±10.8 Brake12_02 12 25 19 6 176.0±6.1 74.7±10.8 Brake50_01 50 23 17 6 175.7±6.4 73.9±10.4 LaneLeft50 50 21 16 5 175.8±6.3 73.7±11.5
- 784 -
IRC-15-89 IRCOBI Conference 2015

C.
plthanwinqustw
D
apdaprremanwce
Fipoce
ce
se
fomstana th
ce
Dle
LaneRCombComb
. Seat and b
A modifiedlates was ushe geometryngle of back well as the lanfrared‐absouality. Since traight‐forwawith the pre‐t
. Occupant
All subjectpplied to theata at a framroperly the wemoved frommoving vehiclnd trajectorywere interpolertain body s
(ag. 1: Characose of the, entroids rHea
entroid of h
egment orien In order to
orehead, bacmarkers) andternum; refend T5 level fCartesian cohe back of th
entroid of he
ue to the cheft.
Right50 inedLeft50 inedRight50
belt
d seat (Fig. 2ed in the tesy of the origi rest: 104°). ateral supporbing materithe original ard translatiotensioner dis
t kinematics
ts wore a skie suit and hame rate of 1windshield hm the lower le a correctiy labeling wated using asegment.
) cteristic kinewhile the daad and rTorso
ead and tor
ntation Head
o derive chack of the he 12 markerserred to as tfor the head oordinate syhe vehicle an
ead and tors
hoice of coor
505050
2), where thsts. Lateral sinal seat (anA layer of f
ort structureial to reduce seat has a con into a nusabled.
in‐tight suit t. Eight Vico100 Hz and dhad to be rempart of the don algorithm
was followed.a purpose‐bu
ematic quantark pose decomputed
rso markers
and Torso (d
racteristic kiead, ear, chs on the tororso segmenand torso. T
ystem, whered the y‐axis
so markers w
rdinate syste
0 21 0 21 0 20
he original ssupport strucgle lateral sfoam (thicknes. All foam e reflections complex geoumerical sim
to minimize n M2 near‐indata was promoved and adoor had to m was applie. Missing seguilt gap‐filling
(b) tities for heaepicts the sitfrom corres
rHead and d) head and t
inematic quaeek bone; crso (bilateralnt markers) The coordinae the origin points to the
with respect
em rx < 0 re
16 15 17
eat’s foam cctures were upport: 120°ess: 40 mm)parts were that may coometry and fulation envi
soft tissue nfrared motocessed in a a modified pbe used. In ed [16]. Thergments in thg procedure
ad and torsotuation durinsponding seg
rTorso with rtorso centroi
antities for hcentral: top l acromion, were used tates of thesewas locatede right of the
t to the loca
efers to forw
5 176 173 17
cushions weadded, whe°, distance b) was appliethen covermpromise thfoam layup tronment. Th
artifacts andion tracking Vicon V612
passenger doorder to comreafter the she trajectory based on a
(c) o motion. Thng the manegment mark
respect to t
id angle Hea
head and torof head, C1pectoralis, cto compute e centroids wd at the seate vehicle (Fig
ation at t=0
ward movem
75.7±6.1 75.9±7.1 77.3±5.8
re removed ere the geombetween leftd to the seaed in artifiche motion trthis setup wahe standard
d a set of retcameras recdata station
oor without wmpensate fostandard proy data, e.g. drigid body a
he light greyeuver. (a) lokers (b) rela
he location ad and Torso.
rso 11 marke1, chin; refeclavicle, scapcentroid tra
were denotedt’s H‐point. Tg. 1a). The re
were denote
ent and ry
73.7±174.1±176.8±9
and replacemetry was ort and right pat surface ancial leather aracking cameas chosen tothree‐point
tro‐reflectivecorded occupn. For the sywindow andor camera vibocess of 3D due to markassumption f
y pose referocation of hative displac
at t=0 (c) h
.
ers on the herred to as pula; centraajectories, wd rHead|Torsox|yThe x‐axis welative displa
ed rHead|Tors
> 0 to a mo
11.5 12.5 9.7
ed by woodriented aroupiece: 314 mnd back rest and a layer era’s recordio allow a mobelt was us
e markers wpant kinemaystem to wod with materbrations in treconstructioker occlusionfor markers
(d) s to the initead and torcement of t
ead and tor
head (bilaterhead segmel: C7, T1, T1
which lie at e
y|z and given was oriented acement of tsox|y|z (Fig. 1b
vement to t
en nd m, as of ng ore ed
was tic ork rial he on ns, on
tial rso he
rso
al: ent 10, ear in to he
b).
he
- 785 -
IRC-15-89 IRCOBI Conference 2015

co
re
y
diexthpo
ar
rH
ne
sp
w
indicomda
Fi
w
th
From the
omputed. Th
eferred to as
y<0 to a forwIf there is
irect correspxtention in there is no choint to rTorso
round x‐, y‐ Head‐rTorso was
egative value
pine bendingNo distinct
with position
For each onstance the misplayed agaorresponds tmedian and sata.
g. 2: Setup o
windshield we
he vehicle. Su
head and to
he correspo
s segment or
ward rotationno bending
pondence behe upper pahange in uppo and the co
and z‐axes
s performed
es in and vg, where the t smoothing and orientat
of the four median, 0.16ainst time. Tto a width opecific quan
(a)
of vehicle and
ere removed
ubjects wore
orso segmen
nding rotati
rientations (F
n. of lumbar a
etween r aart of the lumper torso orieorresponding
were then d
d to obtain vice versa. Co
case Torsoy =procedure wtion estimati
quantities r,6th and 0.84These valuesf twice the sntile curves h
d subjects. A
d, and a Vico
e a skin‐tight
nt markers
on angles a
Fig. 1c). Here
nd thoracica
nd . In conmbar spine centation. Theg vector in t
denoted as Head
x|y|z. No
omparing e.g
= ‐Torsoy indi
was employeion described
, r, and th quantile os were chosestandard devhas the bene
A modified se
n eight came
t suit and ret
also an orie
around the x
e x>0 refers
al spine, i.e.
ntrast flectiocould lead toerefore an othe initial po
Torsox|y|z (Fig
ote that due
g. the two a
icates no effed, except fod above.
, kinematiof the kinemen such thaviation in caefit of preser
(b)
(d)
eat (a) was u
era infrared‐
tro‐reflective
entation rela
x‐, y‐ and z‐
s to rotation
the whole t
on in e.g. theo a forward morientation mosition t=0 w
g. 1d). The a
e to the def
ngles Torsoyfective bendir the inheren
ic corridors matic quantitat 68% of thase of an undrving some in
used in the ve
based motio
e markers we
ative to the
‐axes were d
towards the
torso behave
e lower partmovement omatrix betwewas compute
analogous p
finition posit
and ‐Torsoy
ng. nt low‐pass f
were derivey in considehe data lie wderlying normnformation a
ehicle (d). Pa
on capturing
ere applied (
configuratio
denoted He
e center of t
es as rigid bo
t of the lumof the torso ceen the vectoed and the
rocedure us
tive values o
allows to es
filter propert
ed. In each eration was cwithin the cmal distribuabout the sk
(c)
assenger win
system was
b) and (c).
on at t=0 wead|Torso
x|y|z a
he vehicle a
ody, there is
mbar spine acentroid, whor from the rotation ang
ing the vect
of relate
stimate lumb
ties associat
recorded timcomputed aorridor, whition. Choosikewness of t
ndow and
mounted on
was
nd
nd
s a
nd ile H‐gle
tor
to
bar
ed
me nd ch ng he
n
- 786 -
IRC-15-89 IRCOBI Conference 2015

br
mmva
ofcumre
A
toac
Fi
m
ar
w
Fiquocfoma quBrBrup
Fi
fo
For furthe
raking mane
minimal valuemaximum valalues were u
In the descf emergencyurves is givenmaximum excelated to eac
. Emergen
Emergencyo as Brake12cceleration a
g. 3: Corrid
maneuvers ar
rtifacts in the
wheels, as the
The full set
g. 18). The duantities areccupant movollows that pmaneuvers. Inphase with cualitatively srake50_01 lerake50_01 apper corrido
g. 4: Corrido
or emergency
r analysis th
euvers and 0
e of ry corlue was choused in an an
cription of thy braking, lann in the appcursions durch other and
ncy braking
y braking ma2_01, Brake1are presente
dors for velo
re displayed
e velocity plo
e associated
t of results fodominant moe displayed invement can bphase. The fon the Brake5constant forwsimilar behavead to the smre comparab
or limit curve
ors for the ce
y braking ma
he maximum
0 t ≤ 1.2 s responds tosen. In ordealysis of vari
he maneuverne change anendix, whilering emergefinally inter‐
aneuvers we12_02 and Bd.
ocity vx (lef
against time
ots for Brake
acceleration
or occupant ovement for n Fig. 16, whbe divided inorward move0_01 maneuward excursvior of both hmallest excurble in the inits in both bod
entroid displa
aneuvers.
m excursions
for the rem
o the maximer to compaiation (ANOV
rs the follownd combinedselected plo
ency braking‐ and intra‐su
re performeBrake50_01
t) and front
e. Both value
e50_01 occu
ns do not sho
kinematics fall three maile in Fig. 4 onto two mainement phaseuver the forwion until arohead and torrsions for hetial phase ofdy segments
acement tim
s of rx andmaining man
mum initial ere excursionVA).
III. RESULTS
wing approacd maneuverots are discug, lane chanubject variab
d twice at a in the rema
tal accelera
es are record
urring at arou
ow such beh
for emergenaneuvers occonly the dispn phases, a foe lasts until award movemund t=1.5 s. rso movemeead and torsof the movems.
me history in
ry within teuvers was
xcursion, whns in maneu
S
h was takens are presenussed in the mge and combility is addre
velocity of 1ainder of thi
tion ax (righ
ded from CA
und t=0.5 s, w
avior.
cy maneuvecurs in the salacement in orward movround t=0.5
ment lasts untIn the initialnt was obseo. Median vaent, while Br
frontal direc
the interval
used. For m
hile in the muvers to the
. First vehiclented separatemain part ofmbined maneessed.
12 km/h and s work). In
ht) for the
AN‐bus data.
which are lik
rs is collectegittal plane afrontal direcement phases in the Braktil around t=0 forward morved, but thealues of bothrake12_01 le
ction rx of t
0 t ≤ 0.6 maneuvers to
maneuvers tleft and rig
e and occupely. A full sef the paper. Teuvers are
once at 50 kFig. 3 veloci
three emer
Note that t
kely due to a
ed in the appand the assoction is presee and rebounke12_01 and0.4 s and waovement phae magnitudeh, Brake12_0ead to larger
torso (left) an
s for 12 km
o the right t
to the left tght these pe
ant kinematet of kinemaThereafter tdiscussed a
km/h (referrity and front
gency braki
here are som
a locking of t
endix (Fig. 1ociated ented. The nd phase thad Brake12_02as followed base a es differ. 02 and r median and
nd head (righ
m/h
he
he eak
ics tic he nd
ed tal
ng
me
he
5‐
at 2 by
d
ht)
- 787 -
IRC-15-89 IRCOBI Conference 2015

(max
an
orpushup
Fi
z
gi
exthmph
Although tmedian), peaxis, but rotat
nd head seg
rientation T
ure rotationhows furtherpper leg of t
g. 5: Corrido
zHead (right) fo
The orient
rdle, is a res
xcursion of the same axis median differhase of the m
there was naking at aroutions with a
gment orientTorso
z was ob of the torsr excursion the three‐poi
ors of the to
or three eme
ation of the sult from var
he torso segand also theences of 2°, maneuver) th
egligible lateund t=0.45 smagnitude
tation aroun
served in alo, while thethan the righint belt
orso segment
ergency brak
torso segmeious rotation
gment aroune difference Brake12_01 his indicates
eral motion . No such paof 4° in both
nd the z‐axis
l three manee head keptht shoulder,
t orientation
king maneuv
ent, which wns along the
d the y‐axis (thereof is diand Brake50an effective
the torso sattern can bh directions
s Torsoz and euvers for tits orientatiwhich was c
n around the
vers.
as determinspine. In Fig
(Torsoy) is co
splayed. Sinc0_01: 4° in te flection in t
howed a roe observed occurred in
Headz are dhe forward ion. The rotconsistent w
e z‐axis zTors
ed from mar. 6 the angle
ompared to tce Torso
y is lahe initial forthe lumbar s
tation arounin the head this phase.
displayed. A
and backwaation was suith the subje
o (left and th
rkers on the that corresp
the orientatioarger than ‐ward movempine area.
nd the z‐axisrotation aroIn Fig. 5 cor
significant t
rd movemeuch that theect being he
he orientatio
thorax and sponds to the
on of the segTorso
y (Brake1ment and the
s of up to 1ound the samridors of tor
torso segme
nt indicatinge left shouldeld back by t
on of the he
shoulder e forward
gment aroun12_02: peak e plateau
12° me rso
ent
g a der he
ad
nd
- 788 -
IRC-15-89 IRCOBI Conference 2015
Fi
(le
m
B.
reacw
Fi
th
acanFiaranthshinto
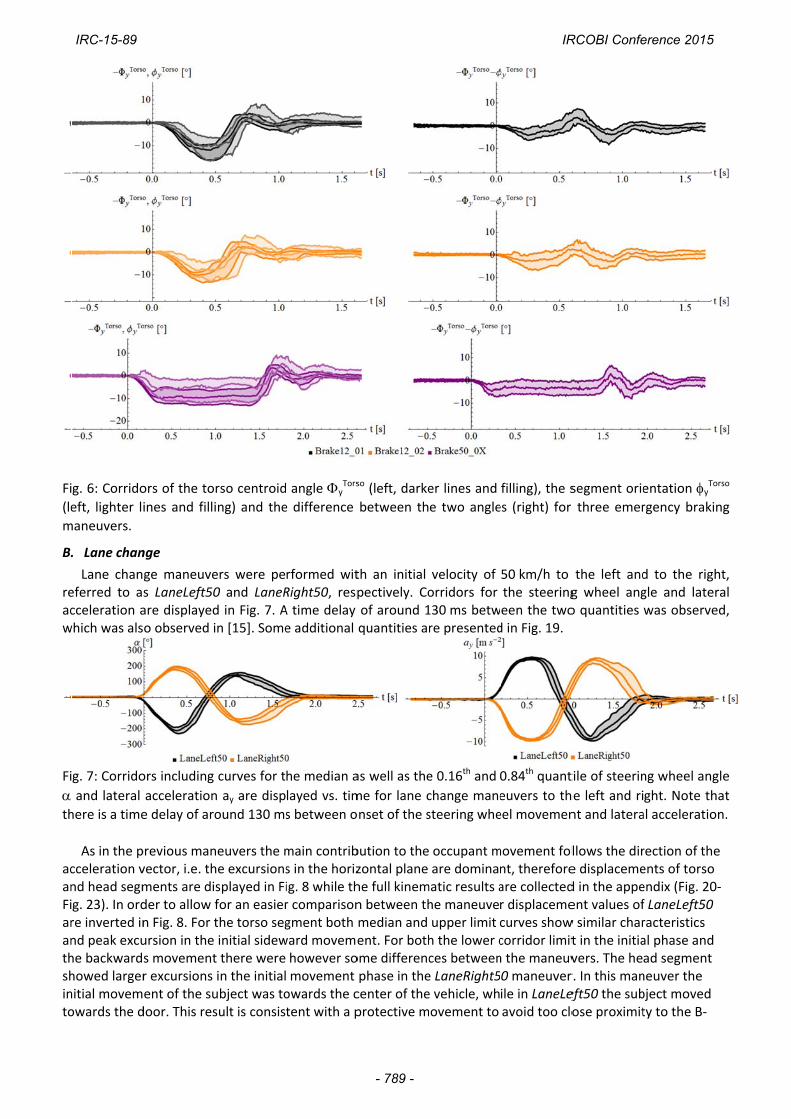
g. 6: Corrido
eft, lighter l
maneuvers.
. Lane chan
Lane chaneferred to acceleration awhich was als
g. 7: Corrido
and lateral
here is a time
As in the p
cceleration vnd head segmg. 23). In ordre inverted innd peak excuhe backwardhowed largernitial movemowards the d
ors of the to
ines and filli
nge
ge maneuves LaneLeft50are displayedo observed i
ors including
acceleration
e delay of ar
previous manvector, i.e. thments are dider to allow n Fig. 8. For tursion in the s movementr excursions ent of the sudoor. This res
rso centroid
ing) and the
ers were pe0 and LaneRd in Fig. 7. Ain [15]. Some
curves for t
n ay are disp
ound 130 ms
neuvers the mhe excursionssplayed in Fifor an easierthe torso seg initial sidewt there werein the initialubject was tosult is consis
angle yTors
e difference
rformed witRight50, respA time delay e additional
he median a
layed vs. tim
s between o
main contribs in the horizig. 8 while thr comparisongment both ward movemehowever so movement owards the ctent with a p
so (left, darke
between th
th an initial pectively. Coof around 1quantities a
as well as the
me for lane c
nset of the s
bution to thezontal plane he full kinemn between thmedian and ent. For bothome differencphase in thecenter of theprotective m
er lines and
e two angle
velocity of orridors for 130 ms betwre presented
e 0.16th and
change mane
steering whe
occupant mare dominan
matic results ahe maneuveupper limit h the lower cces betweene LaneRight5e vehicle, whovement to
filling), the s
es (right) for
50 km/h to the steeringeen the twod in Fig. 19.
0.84th quant
euvers to th
eel movemen
movement folnt, thereforeare collectedr displacemecurves showcorridor limitn the maneuv0 maneuverile in LaneLefavoid too clo
segment orie
three emer
the left andg wheel ango quantities
tile of steerin
he left and ri
nt and latera
llows the dire displacemed in the appeent values ofw similar chart in the initiavers. The her. In this maneft50 the subose proximit
entation yTo
rgency braki
d to the righgle and latewas observe
ng wheel ang
ght. Note th
al acceleratio
rection of theents of torso endix (Fig. 20f LaneLeft50racteristics al phase and ad segment neuver the bject moved ty to the B‐
orso
ng
ht, ral ed,
gle
hat
on.
e
0‐
- 789 -
IRC-15-89 IRCOBI Conference 2015

pire
Fi
fo
La
ceW
ac
F
c
C.
Copeco
Fi
planin
mtoac
illar. Compareveals that th
g. 8: Corrido
or lane chang
aneLeft50 ar
Analogousentroid x wWhile median
ccounted for
Fig. 9: Corrid
centroid angl
. Combined
Two combombinedLeftedal activatioomprehensiv
g. 10: Corrid
For these lane. The fulnd torso segnverse latera
Analogousmovement lasorso until t=cceleration a
ring the peakhere is no sig
ors for the ce
ge maneuver
e displayed.
ly to the emwere comparn values of 1
r by the torso
ors of the ce
e and the se
d maneuver
ined maneuvt50 were peron. The resuve collection
dors of fronta
maneuvers l set of occugment in latel excursions ly to Brake5sts from t=0=1.8 s. The and complet
k head excurgnificant diff
entroid displ
rs. Note that
mergency bred for the t12° for x w
o orientation
entroid angle
egment orien
vers with anrformed, whelting frontal in Fig. 24.
al and latera
more comppant kinemaeral and fronfor Combine50_01 the co0 to around rebound phte stop of th
rsion in the fference (F(1,4
acement tim
t for the sake
raking maneorso. In Fig. were observe
n x, which is
e for the tor
ntation aroun
initial velocere the driveand lateral a
l acceleratio
plex motionsatics was colntal directionedLeft50 are ombined mat=0.3 s and ase follows he vehicle. T
first phase of40)=2.668, P
me history in
e of better c
euvers the s9, x and thed in the fir
s consistent w
rso around t
nd the same
ity of 50 km/er initiated thacceleration
on ax and ay f
s were obselected in then are displayplotted for bneuvers canis followed thereafter
The lateral e
f the movemP=0.11).
lateral direc
omparison t
segment oriehe differencrst second o
with a sheer
he x‐axis xT
axis (right).
/h, referred the steering mcorridors ar
or combined
rved and cae appendix (Fyed in Fig. 1better compn be describeby an almosand coincidxcursion fol
ment in a one
ction ry of tohe inverse e
entation x ae of the twof the maneu
ing moveme
Torso (left) an
to as Combinmotion simue shown in F
d maneuvers
an no longerFig. 25‐ Fig. 21, where in arison. ed in three pst constant edes with a dlows the sam
e‐factor ANO
orso (left) an
excursions in
and rotationo quantities uver only 6°
ent in the tor
nd the differe
nedRight50 altaneously wFig. 10, again
s.
r be describ28) and excuthe latter fig
phases. The excursion ofdecreasing vme initial pa
VA however
nd head (righ
the maneuv
n of the torare displaye° thereof we
rso segment
ence betwee
and with the brakn with a more
bed in a singursions of hegure again t
initial forwaf the head avehicle frontattern, but t
r
ht)
ver
rso ed. ere
.
en
ke e
gle ad he
ard nd tal he
- 790 -
IRC-15-89 IRCOBI Conference 2015

plcoreprexmw
Fi
se
co
D
stfrloobw
F
le
lateau‐like ponstant forwesponse curvrominent inxcursion ovemaneuver alswith (F(1,39)=
g. 11: Corrid
econd row)
omparison th
. Load case
In Fig. 12 mtated the moontal and latoad cases is rbserved in lo
with significan
Fig. 12: Maxi
ead to an init
phase only lward excursives a slight d the head er the plateao shows larg= 6.907, P=0.
dors for the
of the torso
he inverse la
e comparison
maximum heovement durteral directiorestricted to ocations comnt lateral com
mum excurs
tial moveme
asts until arion the subjdecrease of fsegment in u‐like phase ger lateral h01), howeve
centroid dis
o (left) and
teral excursi
n and directi
ead and torsoring emergenon, respectiva range com
mpatible withmponents, si
sion r of heent to the rig
round t=1.0jects return forward excCombinedRis observed
head excursier.
placement t
head (right)
ions in the m
ion of movem
o excursions ncy braking avely. While thmparable to th braking maimilar to wha
ead and tors
ght.
s. Thereafteto a positioursion is obsRight50. In t. Similarly toons. Here a
ime history
) for combin
maneuver Co
ment
projected toand lane chahe torso motthat in the otneuvers, i.e.at is observe
so during var
er the lateraon dominateserved betwthis maneuvo the LaneRigone‐factor A
in frontal (ned maneuv
mbinedLeft5
o the horizonnge maneuvtion in the Cother maneuv. predominaned in lane cha
rious maneu
al excursion ed by forwa
ween t=0.3 s ver also a sght50 maneuANOVA show
rx, first row)
ers. Note th
50 are display
ntal plane areers is predomombinedRighvers, the maxntly excursioange maneuv
uvers. Note t
decreases, ard movemeand t=0.5 s, slight increauver the Comws a signific
) and lateral
hat for the s
yed.
e presentedminantly obsht50 and Comximum head on to the fronvers.
that maneuv
i.e. at largeent. In variowhich is mose of forwambinedRight5cant differen
direction (sake of bett
. As previousserved in thembinedLeft5excursion isnt, but also
vers to the le
ely ous ost ard 50 nce
ry, ter
sly e 0 s
eft
- 791 -
IRC-15-89 IRCOBI Conference 2015

E.
extolahem
BBB
LL
CC
Fi
fo
re
begr
wmvalim
. Compariso
In order toxcursions proorso forwardrger excursioead excursio
mentioned. A
Brake12_01 Brake12_02 Brake50_01
aneLeft50 aneRight50
CombinedLefCombinedRig
g. 13: Centro
or all seven t
egion betwee
Each subje
etween‐manroup mean a
Two limitinwas created bmaneuver numariation is dumiting case
on
o compare diojected to thd movement ons in the froon in the Com complete ta
M rHead
x
-20-17-15
3
ft50 -10ght50 -8
oid displacem
types of man
en the 25th a
ect was expneuver variaand standard
z
ng cases weby sorting all mber for eacue to havingwas derive
fferent manhe transversein the regionontal maneumbinedLeft50able of result
MAXIMUM EXCdx [mm] rH
00 ±49 71 ±52 58 ±40 6 ±15
35 ±31 03 ±26 86 ±39
ment r for tneuvers. The
and the 75th p
posed to eability all absd deviation u
,
re also consz‐values by ch subject, ag different tyed by rando
euvers amone plane are dn between 8uvers, especi0 with respects can be fou
CURSIONS OF HHead
y [mm] 2 ±14
-6 ±18-15 ±23107 ±37
-123 ±7262 ±47
-105 ±62
the head (lef
error bars i
percentile w
ach maneuvesolute head sing
∆
sidered, one magnitude a case whereypes of subjomly resamp
ng each othedisplayed in F6 mm and 1ally Brake12ct to the Comund in Table
TABLE II EAD AND TORS
rHead [mm]200 ±48172 ±52161 ±40109 ±37146 ±30126 ±39145 ±52
ft) and torso
ndicate the
ith the centr
er. In orderand torso e
, ,
being a striand groupinge the within‐sects (e.g. slapling the z‐v
er the norm oFig. 13. All m12 mm. For t2_01, can be mbinedRight2.
SO IN VARIOUS
rTorsox [m
8 -1112 -880 -857 -70 139 -512 -33
o (right) segm
range of val
ral white line
r to discuss excursion va
,
ict correlatiog them to sesubject variaack and tensvalues and
of the maximmaneuvers shthe head moobserved. Th50 maneuve
MANEUVERS
mm] rTorsoy
±22 5±36 2±17 -2
±9 104±14 -10±15 8±20 -7
ment project
ues within a
e marking the
the betwealues were s
, . (
on of excursts of the appability is minise) in the teagain group
mum head anhow comparaovement a tehe significaner has also al
y [mm] rTo
5 ±14 2 ±14
-2 ±15 4 ±22 3 ±22 9 ±22 9 ±37
ted to the tra
set, the box
e median va
en‐subject vscaled by th
(1)
ion to the spropriate sizeimized and tst populatioping them t
nd torso able mean endency of ntly smaller ready been
rso [mm] 112 ±23
94 ±2086 ±18
105 ±22105 ±22104 ±21
88 ±36
ansverse pla
xes denote t
lue.
variability aheir respecti
ubjects, whie to match tthe majority on. The secoto sets of t
ne
he
nd ve
ch he of nd he
- 792 -
IRC-15-89 IRCOBI Conference 2015

apop
acbe
Fi
Fi
w
w
chre
10(trestla
beThmvamsuchdu
pescrenediocstspthth
ppropriate sperations. ThThese limit
ccording to tetween the t
g. 14: Resca
g. 13) across
within‐subject
within‐subject
Compared hanged only esults to resuFor lane ch
04±22 mm (orso) and ‐1elaxed and btudy were noteral supporTo the aut
een reportedherefore, bomaneuvers waried considmovement is upport of thehanges over ue to belt anThere are
erformed in cenario. The elatively shoeeds to be ifferent subjccupant motternum are upinal kinemahis area wouhere are no
size. For thehis corresponting cases totheir group mtwo limiting
led values of
s all maneuv
t mean of a
t mean value
to the resulslightly dueults in [7] andhange manetorso) and 123±72 mm (braced subjeot instructedrt structures thors’ knowld yet, therefoth the heawere observeerably morerestricted bye seat in the the course ond seat, still lvarious limita productiomissing winrt time add treduced to jects and mtion. E.g. foused, which atics, especiauld be occludmarker traj
latter case nds to a situogether with median valuecases, indica
f the torso (r
vers sorted b
strict order
es of a rando
lts for the bre to inclusiond [12] are givuvers results107±37 mm head) in Lanects were red to brace, thof the modiedge no detfore only a cod and torsoed. In contrae in the comy the upper lane changeof the maneuarge inter‐sutations assocn vehicle drdshield, addto this. In tha few key
maneuvers amr characterizconsequentlally in the lumded by bodyjectories ava
a corridor fation where the actual z‐e. For both caating a possib
right) and he
by the subjec
ing of subjec
om sample o
IV
raking maneun of a larger ven here, bus changed co(head) for t
neRight50. Inported for lahe comparabfied seat. tailed kinemomparison to maximum st the assoc
mbined manepart of the
e cases. Also uver, which ubject variabciated with tiving in a traed cameras,he analysis daquantities tmong each zing the torsly does not ambar area, cay and seat aailable in th
for the mea no clear ord‐values are dases the obsble distinctio
ead (left) exc
ct median. Fo
ct excursion
of rescaled ex
V. DISCUSSIO
uvers in [13]set of test s
ut the readeronsiderably bthe excursion [9] lateral hateral peak bly small lat
matic results o braking anexcursions
ciated directeuvers. Bothtree‐point bfor the comcould explaibility of over the test setuaffic‐like env, modified seata a large ato characterother, whicso motion 1allow to addan only be innd would prhe lumbar sp
an values wadering of subdisplayed in Fserved distribon of respon
ursion (boxe
or the sake o
is displayed
xcursion valu
ON
] the averagesubjects. Ther is referred tby including on were obsehead excursioaccelerationeral head an
for combinend lane chanvalues comion of the ph observatiobelt in brakinbined cases,n the second200% in all mup as well asvironment theat and interamount of kirize complexh may obsc12 markers idress bendingnferred fromrobably be dpine and pa
as computedbject types is Fig. 14, wherbution of resse types.
es; for a desc
of compariso
d in black. A
ues is display
e maximum erefore no dto the discusa larger numerved in Lanons of 171±5ns of 5 m∙s‐2.nd torso excu
ed lateral ange maneuve
mparable to eak excursions are not sng and comb, the effectivd observatiomaneuvers ws the analysishe subjects wrior and the nematic datx human moure some mncluding mag of the thoradjacent ma
damaged durrts of the p
d from seve possible. re all subgrouscaled excurs
cription refer
on the limitin
corridor of
yed in gray.
head and todetailed comssion in [13] mber of subjneLeft50 and58 mm and 1. Although sursions may
nd frontal maers is possiblebraking andon in the trasurprising, sbined cases ave direction oon. Despite thwas detecteds. Although twere still in anumber of mta from numovement anmore subtle arkers on C7racical spinearkers, becaring the mapelvis area t
ral resampli
ups are sortesions lie
r to
ng case for t
the estimat
orso excursiomparison of tinstead. ects. Values d ‐103±22 m121±46 mm fubjects in thbe due to t
aneuvers hae at this stagd lane chanansverse plaince the torand the lateof acceleratiohe constraind. the tests wean explicit temaneuvers inerous marked to compadetails in t7, T1, T10 ae. Also detailuse markersneuvers. Sinthe occupan
ng
ed
he
ed
ons he
of mm for his he
ve ge. ge ne rso ral on ts,
ere est n a ers are he nd ed in ce ts’
- 793 -
IRC-15-89 IRCOBI Conference 2015

motion on the seat surface could not be measured. Therefore also a qualitative comparison between the original seat and the seat used in this study is not possible, which is a further limitation of the study. However from video recordings no major sliding motions were identified. Female and male subjects were tested with a large range of different anthropometric properties. Nevertheless no analysis concerning these influence factors is presented here, which remains work to be done.
The results presented in the study will provide a basis for the kinematic validation of active human body models. With the corridors provided e.g. the range of excursions that such models need to be able to simulate can be determined. Also “average”, “slack” and “tense” response types could be identified. For very detailed implementation of muscle activity and posture control as well as simulation of internal forces additional measures such as muscle activity measurements and forces exerted on belt, seat and steering wheel could be beneficial.
V. CONCLUSIONS
In this study a detailed analysis of occupant kinematics with up to 25 subjects under emergency braking, lane change and combined maneuvers is presented. Detailed vehicle and occupant kinematic corridors are also presented. Largely consistent excursion magnitudes over all maneuvers were recorded with an inter‐subject variability of above 200% for every maneuver. Torso rotation due to the asymmetry of the tree‐point belt were addressed in detail for emergency breaking maneuvers and left‐right asymmetries in lateral excursions were addressed in the remaining maneuvers. Also a sheering motion in the torso for brake and lane change maneuvers was identified.
Results from all load‐cases were combined and consistent excursion values for the torso were found across all maneuvers. Head excursions showed larger variations with the initial braking maneuver leading to the largest values and the lane change maneuver to the left, to the smallest values.
VI. ACKNOWLEDGEMENT
VIRTUAL VEHICLE Research Center is funded within the COMET – Competence Centers for Excellent Technologies – programme by the Austrian Federal Ministry for Transport, Innovation and Technology (BMVIT), the Federal Ministry of Science, Research and Economy (BMWFW), the Austrian Research Promotion Agency (FFG), the province of Styria and the Styrian Business Promotion Agency (SFG). The COMET programme is administrated by FFG.
We would, furthermore, like to express our thanks to our supporting industrial and scientific project partners, in alphabetical order: Daimler AG (DI Christian Mayer), Partnership for Dummy Technology and Biomechanics (Dr. Norbert Praxl), Volkswagen AG (DI Jens Weber, DI Emrah Yigit), Graz University of Technology, Vehicle Safety Institute, Austria.
VII. REFERENCES
[1] E. Commission, "Towards a European road safety area: policy orientations on road safety 2011‐2020".
[2] "Vision Zero Initiative," [Online]. Available: http://www.visionzeroinitiative.com/.
[3] S. Ejima, K. Ono, S. Holcombe, K. Kaneoka and M. Fukushima, "A study on occupant kinematics behaviour and muscle activities during preimpact braking based on volunteer tests," in International IRCOBI Conference on the Biomechanics of Impact, Maastricht, The Netherlands, 2007.
[4] S. Ejima, Y. Zama, F. Satou, S. Holcombe, K. Ono, K. Kaneoka and I. Shiina, "Prediction of the Physical Motion of the Human Body based on Muscle Activity during Pre‐Impact Braking," in International IRCOBI Conference on the Biomechanics of Impact, Bern, Switzerland, 2008.
[5] S. Ejima, D. Ito, F. Satou, K. Mikami, K. Ono, K. Kaneoka and I. Shiina, "Effects of Pre‐impact Swerving/Steering on Physical Motion of the Volunteer in the Low‐Speed Side‐impact Sled Test," in International IRCOBI Conference on the Biomechanics of Impact, Dublin, Ireland, 2012.
[6] D. Ito, S. Ejima, S. Kitajima, R. Katoh, H. Ito, M. Sakane, T. Nishino, K. Nakayama, T. Ato and T. Kimura, "Occupant Kinematic Behavior and Effects of a Motorized Seatbelt on Occupant Restraint of Human Volunteers during Low Speed Frontal Impact: Mini‐sled Tests with Mass Production Car Seat," in International IRCOBI Conference on the Biomechanics of Impact, Götheborg, Sweden, 2013.
- 794 -
IRC-15-89 IRCOBI Conference 2015

[7] S. M. Beeman, A. R. Kemper, M. L. Madigan, C. T. Franck and S. C. Loftus, "Occupant kinematics in low‐speed frontal sled tests: Human volunteers, Hybrid III ATD, and PMHS.," Accid Anal Prev, vol. 47, pp. 128‐139, Jul 2012.
[8] A. R. Kemper, S. Beeman and S. M. Duma, "Effects of Pre‐Impact Bracing on Chest Compression of Human Occupants in Low‐Speed Frontal Sled Tests," in 22th International Technical Conference on the Enhanced Safety of Vehicles (ESV), Washington DC, USA, 2011.
[9] L. v. Rooij, H. Elrofai, M. M. G. M. Philippens and H. A. M. Daanen, "Volunteer kinematics and reaction in lateral emergency maneuver tests.," Stapp Car Crash J, vol. 57, pp. 313‐342, Nov 2013.
[10] S. Carlsson and J. Davidsson, "Volunteer occupant kinematics during driver initiated and autonomous braking when driving in real traffic environments," in International IRCOBI Conference on the Biomechanics of Impact, Krakow, Poland, 2011.
[11] J. Östh, J. M. Olafsdóttir, J. Davidsson and K. Brolin, "Driver kinematic and muscle responses in braking events with standard and reversible pre‐tensioned restraints: validation data for human models.," Stapp Car Crash J, vol. 57, pp. 1‐41, Nov 2013.
[12] J. M. Ólafsdóttir, J. K. H. Östh, J. Davidsson and K. B. Brolin, "Passenger Kinematics and Muscle Responses in Autonomous Braking Events with Standard and Reversible Pre‐tensioned Restraints," in International IRCOBI Conference on the Biomechanics of Impact, Götheborg, Sweden, 2013.
[13] S. Kirschbichler, P. Huber, A. Prüggler, T. Steidl, W. Sinz, C. Mayer and G. A. D`Addetta, "Factors influencing occupant kinematics during braking and lane change maneuvers in a passenger vehicle," in International IRCOBI Conference on the Biomechanics of Impact, Berlin, Germany, 2014.
[14] P. Huber, S. Kirschbichler, Prüggler A. and T. Steidl, "Three‐dimensional occupant kinematics during frontal, lateral and combined emergency maneuvers," in International IRCOBI Conference on the Biomechanics of Impact, Berlin, Germany, 2014.
[15] P. Huber, M. Christova, G. A. D’Addetta, E. Gallasch, S. Kirschbichler, C. Mayer, A. Prüggler, A. Rieser, W. Sinz and D. Wallner, "Muscle activation onset latencies and amplitudes during lane change in a full vehicle test," in Proceedings of the IRCOBI Conference, Götheborg, Sweden,2013.
[16] P. Huber, C. Cagran and W. Müller, "An algorithm to correct for camera vibrations in optical motion tracking systems.," J Biomech, vol. 44, no. 11, pp. 2172‐2176.
- 795 -
IRC-15-89 IRCOBI Conference 2015

A
Fi
br
Fi
em
. Occupant
g. 15: Corrid
raking mane
g. 16: Corrid
mergency br
response Br
dors for the c
uvers.
dors for the
raking maneu
rake12_01, B
centroid loca
centroid di
uvers.
V
Brake12_02
ation r time h
splacement
VIII. APPEND
and Brake50
history of th
r time hist
DIX
0_01
e torso (left)
tory of the
) and head (r
torso (left) a
right) for thr
and head (r
ree emergen
ight) for thr
ncy
ee
- 796 -
IRC-15-89 IRCOBI Conference 2015

Fi
em
Fi
br
g. 17: Corri
mergency br
g. 18: Corrid
raking mane
dors for the
raking maneu
dors for the
uvers.
e segment o
uvers.
centroid ang
orientation
gle time h
time histo
history of the
ory of the to
e torso (left)
orso (left) a
and head (r
and head (ri
right) for thr
ght) for thr
ree emergen
ee
ncy
- 797 -
IRC-15-89 IRCOBI Conference 2015

B.
Fi
(la
C.
Fi
m
. Vehicle Kin
g. 19: Corrid
ast row) for
. Occupant
g. 20: Corrid
maneuvers.
inematics La
dors of latera
lane change
response La
dors for the
aneLeft50 an
al acceleratio
maneuvers.
aneLeft50 an
centroid lo
d LaneRight
on ay and ve
nd LaneRight
cation r tim
t50
locity vx (firs
t50
e history of
st row) and s
f the torso (
steering whe
left) and he
eel angle a
ad (right) fo
and yaw rate
or lane chan
e
ge
- 798 -
IRC-15-89 IRCOBI Conference 2015
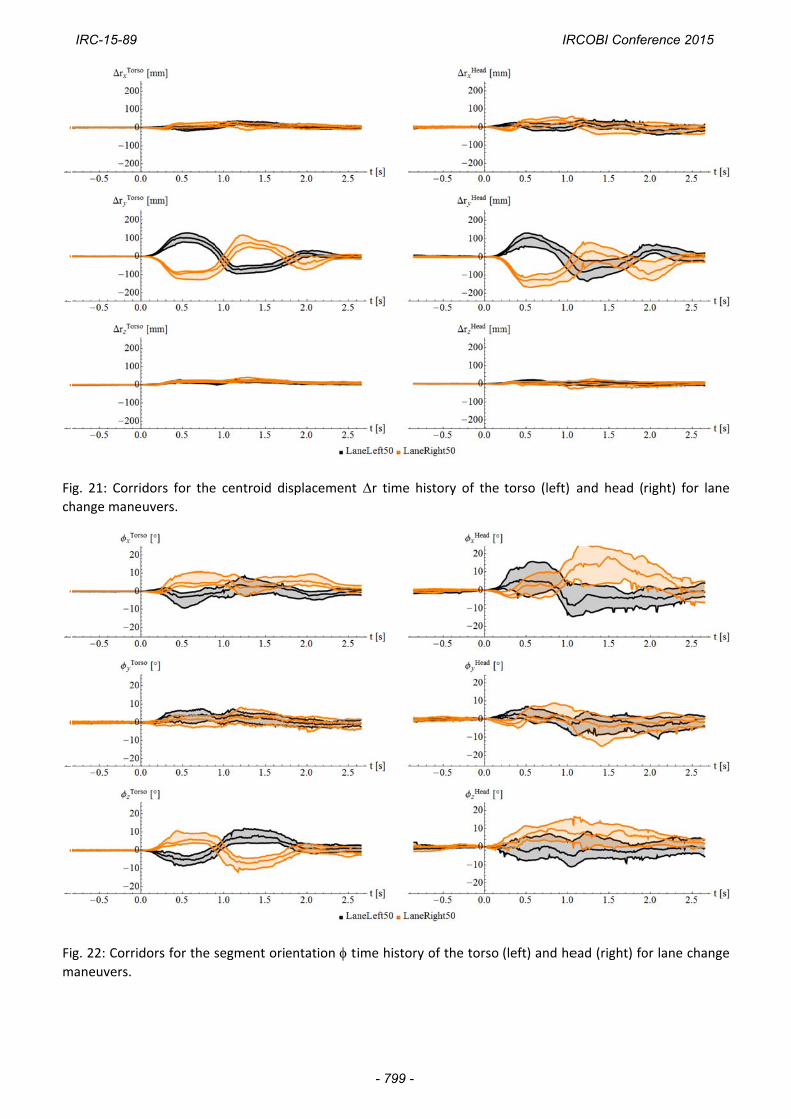
Fi
ch
Fi
m
g. 21: Corrid
hange maneu
g. 22: Corrid
maneuvers.
dors for the
uvers.
dors for the
e centroid di
segment ori
isplacement
entation ti
r time his
ime history o
story of the
of the torso
torso (left)
(left) and he
and head (
ead (right) fo
right) for la
or lane chan
ne
ge
- 799 -
IRC-15-89 IRCOBI Conference 2015

Fi
m
D
Fi
w
g. 23: Corrid
maneuvers.
. Vehicle Ki
g. 24: Corrid
wheel angle
dors for the
inematics Co
dors of front
and yaw ra
e centroid a
ombinedLeft
tal and later
te (last row
ngle time
t50 and Com
al accelerati
w) for comb
e history of
binedRight5
ion ax and ayined maneuv
the torso (l
50
y (first row),
vers.
eft) and hea
velocity vx (
ad (right) fo
(second row
or lane chan
w) and steeri
ge
ng
- 800 -
IRC-15-89 IRCOBI Conference 2015

E.
Fi
Fi
m
. Occupant
g. 25: Corrid
g. 26: Corrid
maneuvers.
response Co
ors for the ce
dors for the c
ombinedLeft5
entroid locat
centroid disp
50 and Comb
tion r time hi
placement
binedRight5
story of tors
r time histor
50
o (left) and h
ry of the tor
head (right) fo
so (left) and
or combined
head (right)
d maneuvers.
) for combin
.
ed
- 801 -
IRC-15-89 IRCOBI Conference 2015

Fi
m
Fi
m
g. 27: Corrid
maneuvers.
g. 28: Corri
maneuvers.
dors for the
dors for the
segment or
e centroid a
ientation t
angle tim
time history
me history of
y of the torso
f the torso
o (left) and
(left) and h
head (right)
head (right)
for combin
for combin
ed
ed
- 802 -
IRC-15-89 IRCOBI Conference 2015







