

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 1/110
ELECTRICAL MOTORS
D. BHAVSINGH
NITW

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 2/110
+
� An electric motor converts electric energy intomechanical motion
12V
-
ElectricEnergy
� Electric motors are used toperform a mechanical task by
using electricity� Mechanical energy used to e.g.
� Rotate pump impeller, fan, blower � Drive compressors
� Lift materials
� Motors in industry: 70% of electrical load
WHAT IS AN ELECTRIC MOTOR?

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 3/110
� There are many different types and classifications of electricmotors:
Permanent magnet DC motor
Brushless DC motor
Wound field motor
Universal motorsThree phase induction motor
Three-phase AC synchronous motors
Two-phase AC Servo motors
torque motors
Shaded-pole motorsplit-phase induction motor
capacitor start motor
Permanent Split-Capacitor (PSC) motor
Repulsion-start induction-run (RS-IR) motor
Stepper motor
Repulsion motor
Linear motor
Variable reluctance motor
Unipolar stepper motorBipolar stepper
Full step stepper motor
Half step stepper motor
Micro step stepper motor
Switched reluctance motorShaded-pole synchronous motor
Induction motor
Coreless DC motor
Others......
TOTAL ELECTRIC MOTORS

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 4/110
TYPE OF ELECTRIC MOTORSTYPE OF ELECTRIC MOTORS
World of Motors
DC Motors AC Motors
Brush DC
Brushless DC
Single Phase
Poly-Phase
(3 phase)
Linear
Stepper
Universal
Electric MotorsPneumatic Motors Hydraulic Motors
Servo Motors

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 5/110
TYPE OF ELECTRIC MOTORSTYPE OF ELECTRIC MOTORS
� classification of AC and DC motors
Electric Motors
Alternatin Current(AC) Motors
Direct Current (DC) Motors
Synchronous Induction
Three-PhaseSin le-Phase
Self ExcitedSeparatelyExcited
Series ShuntCompound

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 6/110
Electric MotorsElectric Motors
� DC motors still have many practical applications, suchautomobile, aircraft, and portable electronics, in speedcontrol applications
� An advantage of DC motors is that it is easy to control theirspeed.
� Most DC machines are similar to AC machines: i.e. they haveAC voltages and current within them.
� DC machines have DC outputs just because they have a
mechanism converting AC voltages to DC voltages at theirterminals. This mechanism is called a commutator;theref ore, DC machines are also called commutatingmachines

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 7/110
What Is a Permanent Magnet?
� A piece of iron or steel which produces a magnetic field
� Found in nature as magnetite (Fe3O4) lodestones
� Magnetic field causes the permanent magnet to attract
iron and some other materials
� Two ends of the permanent magnet are usually
designated North and South
� Opposite magnet ends attract and like magnet ends repel

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 8/110
What Is an Electromagnet?
� Electromagnets behave like permanent
magnets
but their magnetic field is not
permanent
� Magnetic field is temporarily induced by an
electric current

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 9/110
How Do You Make an Electromagnet?
� Start with an iron bar

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 10/110
How Do You Make an Electromagnet?
� Start with an iron bar
� Wrap a wire around the iron bar

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 11/110
How Do You Make an Electromagnet?
� Start with an iron bar
� Wrap a wire around the iron bar
� Connecting a battery causes a current to flow
in the wire
Current
+ -

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 12/110
How Do You Make an Electromagnet?
� Start with an iron bar
� Wrap a wire around the iron bar
� Connecting a battery causes a current to flow in the wire
� The current induces a magnetic field creating an
electromagnet
Current
SOUTHNORTH
+ -

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 13/110
How Do You Make an Electromagnet?
� Reversing the current direction, reverses the
polarity
Current
+-
NORTHSOUTH

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 14/110
How Do You Make an Electromagnet?
� Reversing the current direction, reverses the
polarity
� If the current is stopped, the induced magnetic field
decays to 0
Current
+-
NORTHSOUTH

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 15/110
DC Motors ± Components
� Field pole� North pole and south pole
� Receive electricity to formmagnetic field
� Armature� Cylinder between the poles
� Electromagnet when current goes through
� Linked to drive shaft to drive the load
� Commutator � Overturns current direction in armature

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 16/110

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 17/110
What Is an Electric Motor?
STATOR
ROTOR
� An electric motor has two basic parts:
± The stationary part is called the stator.
± The rotating part of the electric motor is called therotor.

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 18/110

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 19/110
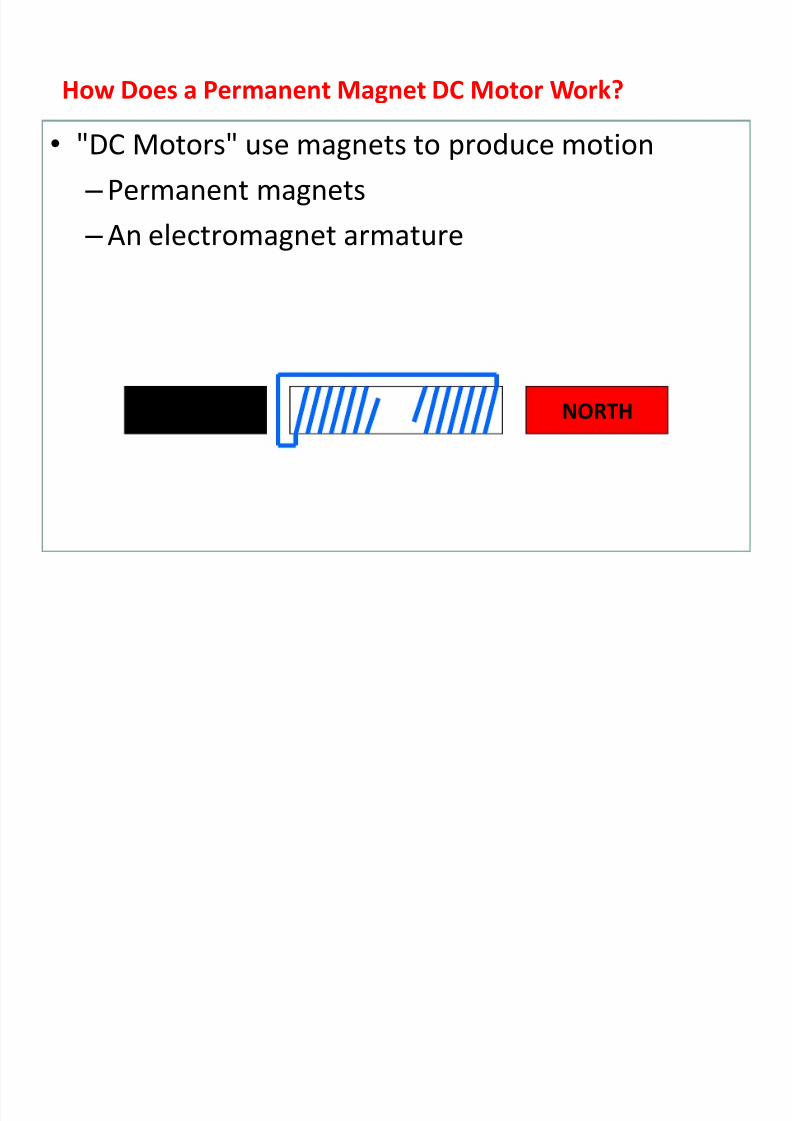
How Does a Permanent Magnet DC Motor Work?
� "DC Motors" use magnets to produce motion
± Permanent magnets
NORTHSOUTH
8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 20/110
� "DC Motors" use magnets to produce motion
± Permanent magnets
± An electromagnet armature
How Does a Permanent Magnet DC Motor Work?
NORTHSOUTH

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 21/110

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 22/110
NORTHSOUTH
� Electromagnet armature is mounted on axle so that
it can rotate
� A commutator makes an electrical contact with the
motor's brushes
Permanent Magnet DC Motor
Commutator and Brushes

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 23/110
Permanent Magnet DC Motor
Commutator Structure
� Commutator is comprised of two "near-halves" of a
ring

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 24/110
� Commutator is comprised of two "near-halves" of a ring
� Mounted on the armature's axle to rotate with the rotor
Armature
Permanent Magnet DC Motor
Commutator Structure

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 25/110
Permanent Magnet DC Motor
Commutator Structure
� Armature's windings are connected to the
commutator

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 26/110
Permanent Magnet DC Motor
Commutator and Brushes
� Armature's windings are connected to the commutator
� Brushes connect the commutator to the battery

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 27/110
NORTHSOUTH
� Current flows through the armature's windings,
which polarizes the electromagnet
+ -
Permanent Magnet DC Motor
Electromagnet Polarization

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 28/110
NORTHSOUTH
� The like magnets (NORTH-NORTH and SOUTH-SOUTH) repel
� As the like magnets repel, the armature rotates, creating mechanical
motion
+ -
Permanent Magnet DC Motor Rotation

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 29/110
NORTHSOUTH
� What direction will the armature spin?
� Clockwise? Counterclockwise?
Clockwise ?
Counterclockwise ?
Permanent Magnet DC Motor Rotation Direction?
+ -

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 30/110

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 31/110
Left Hand Rule
� Start with two opposite
ends of a magnet
NORTH
SOUTH

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 32/110
Left Hand Rule: Magnetic Field
NORTH
SOUTH
� The magnetic field (B) is from
the NORTH pole to the
opposite SOUTH pole
� The pointing finger
follows B into
screen B

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 33/110
Left Hand Rule: Current Flow
NORTH
SOUTH
� Current flows in a wire through
the magnetic field from left to
right
� The middle finger follows I1right, or I2 left
I1
I2

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 34/110
Left Hand Rule: Force
NORTH
SOUTH
� The force, F, acting on each wire
is in the direction of the
thumb
� The wire with I1is pushed up,
I2
down
I1
I2
F1
F2

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 35/110
Left Hand Rule: Force
NORTH
SOUTH
� The magnitude of F is give by:
| F | = | I | * P * | B |
where P is the length of the
wire in B
I1
I2
F1
F2
P

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 36/110
Left Hand Rule: Current Loop
NORTH
SOUTH
� If the current flows in a loop,
the force(s) will cause the
loop to rotateI
F
F

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 37/110

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 38/110
NORTHSOUTH
� Magnetic field is from right to left
� Imagine current flows out of the screen in this cross section
� The force causes the armature to rotate clockwise
+ -
Permanent Magnet DC Motor Rotation

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 39/110
NORTHSOUTH
+ -
Permanent Magnet DC Motor Rotation
� At some point, the commutator halves will rotate away
from the brushes
� Momentum keeps the electromagnet and the commutator
ring rotating

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 40/110
NORTHSOUTH
+ -
Permanent Magnet DC Motor Rotation
� When the commutator halves reconnect with the
other brush, the current in the windings is reversed

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 41/110
NORTHSOUTH
+ -
Permanent Magnet DC Motor Rotation
� When the commutator halves reconnect with the
other brush, the current in the windings is reversed
� The polarity is reversed and the armature continues
to rotate + -

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 42/110
NORTHSOUTH
� Magnetic field is from right to left
� Imagine current flows out of the screen in this cross section
� The force causes the armature to rotate clockwise
+ -
Permanent Magnet DC Motor Rotation

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 43/110

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 44/110

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 45/110

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 46/110
ROTATING DC MOTOR PRINCIPLE TORQUE TAMING
This is accomplished by using a commutator (either mechanical or electronic cycle).
U0 180 360
How it Works.
Metal ring attached to shaft split in two
sections

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 47/110
ROTATING DC MOTOR PRINCIPLE TORQUE TAMING
The figure illustrates one method by which the commutation function might be
accomplished. Rather than hard wiring the current source to the coil, the current is
conducted through sliding contacts (brushes) connected to the current source. The
brushes ride on the ends of the coil wires, thus conducting current through the coil.
In this simplified motor, the brushes switch coil connections about once every 180o
of rotation. Therefore, the direction of current flow remains fixed with respect to themagnetic field.

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 48/110
ROTATING DC MOTOR PRINCIPLE TORQUE TAMING
The torque produced by this design momentarily goes to zero
every half cycle. Stall is possible, also start up may require a
small push. In addition to this the torque versus rotation angle isnot uniform

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 49/110
ROTATING DC MOTOR PRINCIPLE TORQUE TAMING

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 50/110
ROTATING DC MOTORPRINCIPLE FIELD TAMING
To obtain a more even
torque, the magnetic fieldlines should look somethinglike: F
X
F X
BX
BX
BX
BX
B
X
BX
And how do you get a magnetic field
with that shape?
BX

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 51/110
ROTATINGDCMOTORPRINCIPLE FIELD TAMING
To obtain a more even
torque, the magnetic fieldlines should look somethinglike:
B field lines follow the path of least reluctance, so the
curved poles create roughly a radial field pattern.
BX
pol s of ag t
Rotor

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 52/110
Redesign the permanent magnet poles.
Insert soft iron rotor
ROTATINGDCMOTORPRINCIPLE FIELD TAMING

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 53/110
ROTATING DC MOTORPRINCIPLE FIELD TAMING
B
X
Rotor
r
Motor dimensions:
Radius r
epth N
Tor i ra ial fi l
Nr I 2!+

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 54/110
ROTATINGDCMOTORPRINCIPLE FIELD TAMING
In a practical motor design, use many turns of wire on the rotor (rather than justone) to increase the torque.
BX
Rotor
r

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 55/110

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 56/110
� The controlled application of electrical energy to a motor toelicit a desired mechanical response
± Start / Stop ± Speed
± Torque
± Position
� Significant amount of electronics may be required to
control the operation of some electric motors
What Is Motor Control ?

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 57/110
Control of Electromagnetics
� Much of the physical design of an electric motor and its controlsystem are related to the switching of the electromagnetic field
� There is a mechanical force which acts on a current carrying wire
within a magnetic field
� The mechanical force is perpendicular to the wire and the magnetic
field
� The relative magnetic fields between the rotor and stator arearranged so that a torque is created, causing the rotor to rotate
about its axis

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 58/110
Controlling a Permanent Magnet DC Motor
� Bi-directional PM DC motors are controlled with an "H-Bridge" circuit consisting of the motor and four power switches

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 59/110
Current
Turning On a PMDC Motor
� One switch is closed in each leg of the "H"
� One switch is open in each leg of the "H"

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 60/110
Current
� One switch is closed in each leg of the "H"
� One switch is open in each leg of the "H
Turning On a PMDC Motor in Other Direction

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 61/110
Current
� Unidirectional motors are controlled by a half-H
bridge circuit
Controlling a Permanent Magnet DC (PMDC) Motor

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 62/110
DC MOTORS
� Speed control without impact power supply
quality
� Changing armature voltage
� Changing field current
� Restricted use
� Few low/medium speed applications
� Clean, non-hazardous areas
� Expensive compared to AC motors
8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 63/110
� Relationship between speed, field flux and armature voltage
�
Back electromagnetic force: E = K * NTorque: T = K *Ia
� E = electromagnetic force developed at armature terminal (volt)
� * = field flux which is directly proportional to field current
� N = speed in RPM (revolutions per minute)
� T = electromagnetic torque
� Ia = armature current� K = an equation constant

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 64/110

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 65/110
Self-excited DC motor : series motor
� Field winding in serieswith armature winding
� Field current =
armature current
� Speed restricted to
5000 RPM
� Avoid running with
no load: speeduncontrolled
Suited for high
starting torque:
cranes, hoists
8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 66/110
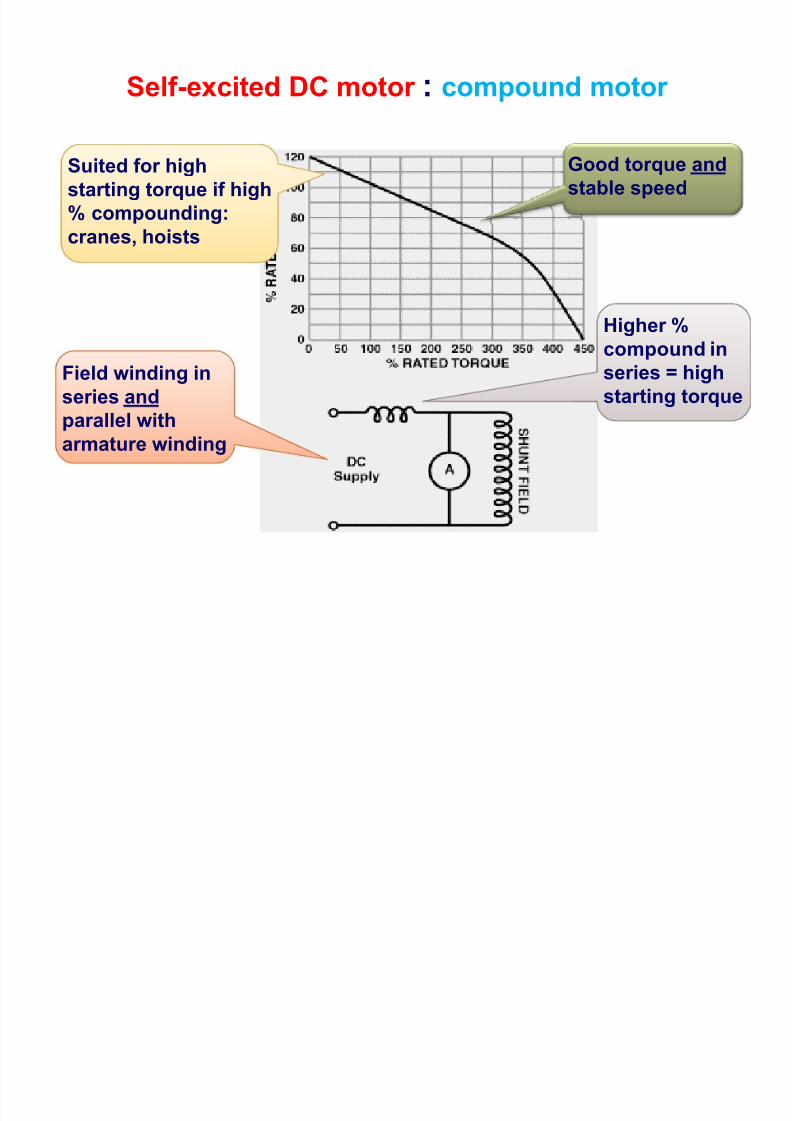
Self-excited DC motor : compound motor
Field winding in
series andparallel with
armature winding
Good torque and
stable speed
Higher %
compound in
series = high
starting torque
Suited for high
starting torque if high
% compounding:
cranes, hoists

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 67/110
Power flow and losses in DC machines
Unfortunately, not all electrical power is converted to mechanical
power by a motor and not all mechanical power is converted to
electrical power by a generator
The efficiency of a DC machine is:
100%in loss
in
P P
P L
! �
or100
out
in
L ! �

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 68/110
The losses in DC machines
There are five categories of losses occurring in DC machines.
1. Electrical or copper losses the resistive losses in the armature and field windings
of the machine.
Armature loss: 2 A A A P I R!
Field loss: 2
F F F P I !
Where I A
and IF
are armature and field currents and R A
and RF
are armature and field
(winding) resistances usually measured at normal operating temperature.

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 69/110
The losses in DC machines
2. Brush (drop) losses the power lost across the contact
potential at the brushes of the machine.
BD BD A P V I
!
Where I A
is the armature current and V BD
is the brush voltage drop.
The voltage drop across the set of brushes is approximately constant
over a large range of armature currents and it is usually assumed to
be about 2 V.
Other losses are exactly the same as in AC machines

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 70/110
THE LOSSES IN DC MACHINES
4. Mechanical losses losses associated with mechanical effects: friction
(friction of the bearings) and windage (friction between the moving parts of the
machine and the air inside the casing). These losses vary as the cube of rotation
speed n3.
3. Core losses hysteresis losses and eddy current losses. They
vary as B2 (square of flux density) and as n1.5 (speed of rotation of
the magnetic field).
5. Stray (Miscellaneous) losses losses that cannot be classified in any of
the previous categories. They are usually due to inaccuracies in modeling. For
many machines, stray losses are assumed as 1% of full load.

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 71/110
THE POWER-FLOW DIAGRAM
On of the most convenient technique to account for power losses
in a machine is the power-flow diagram.
for a dc
motor:
Electrical power is input to the machine, and the electrical and brush
losses must be subtracted. The remaining power is ideally converted
from electrical to mechanical form at the point labeled as P conv
.

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 72/110
BRUSHLESS DC MOTOR
� Similar to a permanent magnet DC motor� Rotor is always the permanent magnet (internal or external)
� Design eliminates the need for brushes by using a more complexdrive circuit
� Advantages:
+ High efficiency+ High reliability
+ Low EMI
+ Good speed control
� Disadvantages:
± May be more expensive than "brushed" DC motors
± More complex and expensive drive circuit than "brushed" DC motors

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 73/110
� Many of the limitations of the classic permanent magnet "brushed" DC motor are caused by the brushes pressing against the rotating
commutator creating friction
± As the motor speed is increased, brushes may not remain in
contact with the rotating commutator
± At higher speeds, brushes have increasing difficulty in maintaining
contact
± Sparks and electric noise may be created as the brushes
encounter flaws in the commutator surface or as the commutator
is moving away from the just energized rotor segment ± Brushes eventually wear out and require replacement, and the
commutator itself is subject to wear and maintenance
� Brushless DC motors avoid these problems with a modified design,
but require a more complex control system
WHY A BRUSHLESS DC MOTOR ?

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 74/110
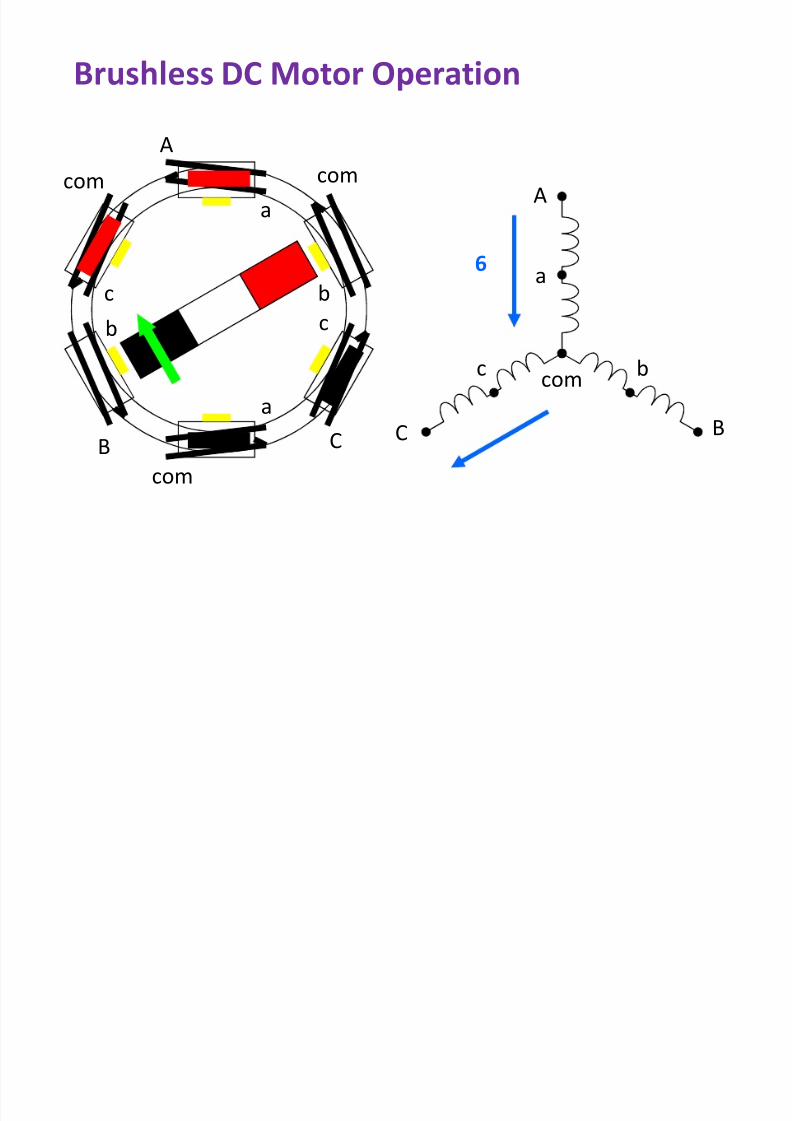
How Does a Brushless DC Motor Work ?
� A brushless DC motor uses electronic sensors to detect the positionof the rotor without using a metallic contact
� Using the sensor's signals, the polarity of the electromagnets is
switched by the motor control drive circuitry
� The motor can be easily synchronized to a clock signal, providing
precise speed control
� Brushless DC motors may have:
± An external PM rotor and internal electromagnet stator
± An internal PM rotor and external electromagnet stator

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 75/110
� This example brushless DC motor has: ± An internal, permanent magnet rotor
Example Brushless DC Motor Operation

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 76/110
� This example brushless DC motor has: ± An external, electromagnet stator
Example Brushless DC Motor Operation

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 77/110
� This example brushless DC motor has: ± An external, electromagnet stator, with magnetic
field sensors
Example Brushless DC Motor Operation
hl i

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 78/110
Brushless DC Motor Construction
A
a
a
com
com
b
b
B
com
c
c
C
A
a
b
B
c
C
com

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 79/110
hl C O i

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 80/110
A
a
b
B
c
C
com
A
a
a
com
com
b
b
B
com
c
c
C
2
Brushless DC Motor Operation
B hl DC M O i

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 81/110
A
a
b
B
c
C
com
A
a
a
com
com
b
b
B
com
c
c
C
3
Brushless DC Motor Operation
B hl DC M O i

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 82/110
A
a
b
B
c
C
com
A
a
a
com
com
b
b
B
com
c
c
C
4
Brushless DC Motor Operation

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 83/110
8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 84/110
A
a
b
B
c
C
com
A
a
a
com
com
b
b
B
com
c
c
C
6
Brushless DC Motor Operation
B hl DC M t O ti

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 85/110
A
a
b
B
c
C
com
A
a
a
com
com
b
b
B
com
c
c
C
1
Brushless DC Motor Operation

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 86/110
Brushless DC Motor

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 87/110
A
a
b
B
c
C
com
A1 B1 C1
A2 B2 C2
Control Circuit
Brushless DC Motor

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 88/110
A
a
b
B
c
C
com
1
A1 B1 C1
A2 B2 C2
Control Circuit
Brushless DC Motor

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 89/110
A
a
b
B
c
C
com
2
A1 B1 C1
A2 B2 C2
Control Circuit

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 90/110
A
a
b
B
c
C
com
3
A1 B1 C1
A2 B2 C2
BRUSHLESS DC MOTOR CONTROL CIRCUIT
Brushless DC Motor

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 91/110
A
a
b
B
c
C
com
4
A1 B1 C1
A2 B2 C2
Control Circuit
Brushless DC Motor

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 92/110
A
a
b
B
c
C
com
5
A1 B1 C1
A2 B2 C2
Control Circuit
Brushless DC Motor

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 93/110
A
a
b
B
c
C
com
6
A1 B1 C1
A2 B2 C2
Control Circuit
Brushless DC Motor

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 94/110
Control Circuit
A
a
b
B
c
C
com
1
A1 B1 C1
A2 B2 C2

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 95/110
Permanent Magnet Stepper Brushless DC
DC Motor Motor Motor
Advantages: + Low cost + Position control + High efficiency
(high volume) (low cost + High reliability
+ Simple operation control circuits) + Low EMI
+ Speed control
Disadvantages: - Medium efficiency - Poor efficiency - Maybe higher cost
- Poor reliability - Digital interface - Complex control
- Bad EMI - High cost
Types of Electric Motors

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 96/110
Brushless DC Motor
� Similar to a permanent magnet DC motor� Rotor is always the permanent magnet (internal or external)
� Design eliminates the need for brushes by using a more complexdrive circuit
� Advantages:
+ High efficiency+ High reliability
+ Low EMI
+ Good speed control
� Disadvantages:
± May be more expensive than "brushed" DC motors ± More complex and expensive drive circuit than "brushed"
DC motors

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 97/110
Modeling a DC motor
if
Replaced by a
permanentpermanent
magnetmagnet
Electrical Part Mechanical Part
Electromechanical part

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 98/110
M d li th A t C t ll d DC M t

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 99/110
Modeling the Armature Controlled DC Motor

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 100/110
SIMULINK MODEL
100Ravi Kumar Jatoth, Asst Prof, Dept of ECE

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 101/110
3 assumptions in modeling DC motor
Assumption 1:Assumption 1: The air gap flux is proportional to the field current
f iw* f ik 1
!*
Assumption 2:Assumption 2: The torque developed on the motor shaft is proportional to theproduct of armature current and the air gap flux
ai*wX f aa iik k ik 212 !*!X
2 configurations can be made in controlling DC motor2 configurations can be made in controlling DC motor
(1) Armature-controlled DC motor (if = constant)
(2) Field-controlled DC motor (ia = constant)
Our focus
3 assumptions in modeling DC motor

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 102/110
3 assumptions in modeling DC motor
(cont.)
Assumption 3:Assumption 3: The back-emf is proportional to the velocity of the motor shaft
mbvy
w U
Our objective is to find the transfer function of
)()(
s E
s
a
mU
ll d

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 103/110
Armature-Controlled DC motor
Electrical part:Electrical part:
By applying KVL, we obtain the differential equation:
baaa
aa vi Rd t
d i Lt e !)(
Take the Laplace transform yields to:
)()()( sV s I R s L s baaaa ! EquationEquation 11
Mechanical part:Mechanical part:
d t
d
d t
d J t
mm
mmm
UUX !
2
2
)(
In Laplace
? Ammmmmmmm
s B s J s B s J s UUUX !!22)( EquationEquation 22
ll d ( )

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 104/110
Armature-Controlled DC motor (cont.)ElectroElectro--Mechanical part:Mechanical part:
a f m iik k 21!X
mk Motor torque constant
)( s I k amm !X
mbvy
wU mbb k vy
! U
Relationship between Torque & armature current
Relationship between back-emf & angular speed
Equation 3Equation 3
EquationEquation 44
Back-emf constant
mbb sk V U!
? A)()(
1)( sV s E
Rs s I baa
! Equation 1Equation 1

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 105/110
R saa
? A)(1
2s
s s J m
mm
m X U
! EquationEquation 22
amm I k !X Equation 3Equation 3
EquationEquation 44mbb sk V U!
aa R sL
1m
k s B J s
mm2
1
b sk
)( smU)( s I a )( smX )( sa
)( sV b
We can draw in term of block diagram
)(1
sG )(2 sG)(3 sG

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 106/110
aa R sL 1 mk
s D J s mm 2
1
b sk
)( smU)( s I a )( sm
X )( sa
)( sV b
)( s H
)()()()(1
)()()(
)(
)(
321
321
s H sG sG sG
sG sG sG
s
s
a
m
!
U
Thus, the transfer function for DC motor

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 107/110

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 108/110

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 109/110
� .

8/6/2019 Saranya Bhavsingh Motors
http://slidepdf.com/reader/full/saranya-bhavsingh-motors 110/110
Thank
You







