
SMOS Workshop – Hamburg, 9.-10. November 2006
SMOS
Uni Bonn contributions to SMOS Validation
Ralf LindauBonn University
SMOS Workshop – Hamburg, 9.-10. November 2006
SMOS
Bonn contributions Detection of Radio Frequency Interference
- Found in SMMR, AMSR etc.- Expected also in SMOS
Comparison of SMOS soil moisture with existing data- Direct measurements from GSMDB - AMSR-derived SM
Pixel-intern variance- Necessary to interprete the intended validations with point
measurements properly.- build and operate a transportable polarized L-Band radiometer
Investigate signal noise due to rain and vegetation

SMOS Workshop – Hamburg, 9.-10. November 2006
SMOSRadio Frequency
Interference
Time series of 6 GHz brightness temperature from SMMR in France
Until 1981 the normal annual cycle is found.
After 1981 the 6 Ghz signal is completely unusable due to noise.

SMOS Workshop – Hamburg, 9.-10. November 2006
SMOS
SMMR RFI in 6 GHz
The scatter is low in Sibiria, increases westward and reaches maximum values near St. Petersburg

SMOS Workshop – Hamburg, 9.-10. November 2006
SMOS
ASMR RFI
In Europe the 10 GHz channel is completely noisy in England and Italy.
In the USA the 6 GHz measurements are corrupted over New York, Boulder etc.

SMOS Workshop – Hamburg, 9.-10. November 2006
SMOS
AMSR 10 GHz RFI
• RFI is detectable by
• high monthly averages
• high monthly stddev.
250 K
300 K
SMOS Workshop – Hamburg, 9.-10. November 2006
SMOS
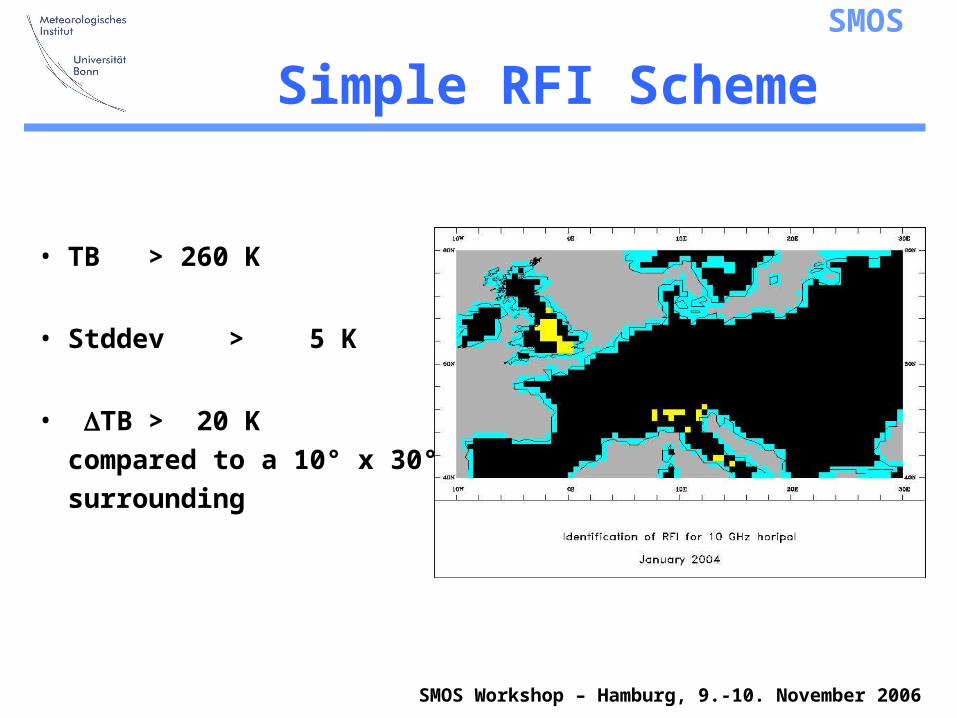
Simple RFI Scheme
• TB > 260 K
• Stddev > 5 K
• TB > 20 K
compared to a 10° x 30°
surrounding

SMOS Workshop – Hamburg, 9.-10. November 2006
SMOS
Soil Moisture from AMSR
Longtime mean + 10-day anomalies

SMOS Workshop – Hamburg, 9.-10. November 2006
SMOS
2-Step Retrieval
SMOS Workshop – Hamburg, 9.-10. November 2006
SMOS
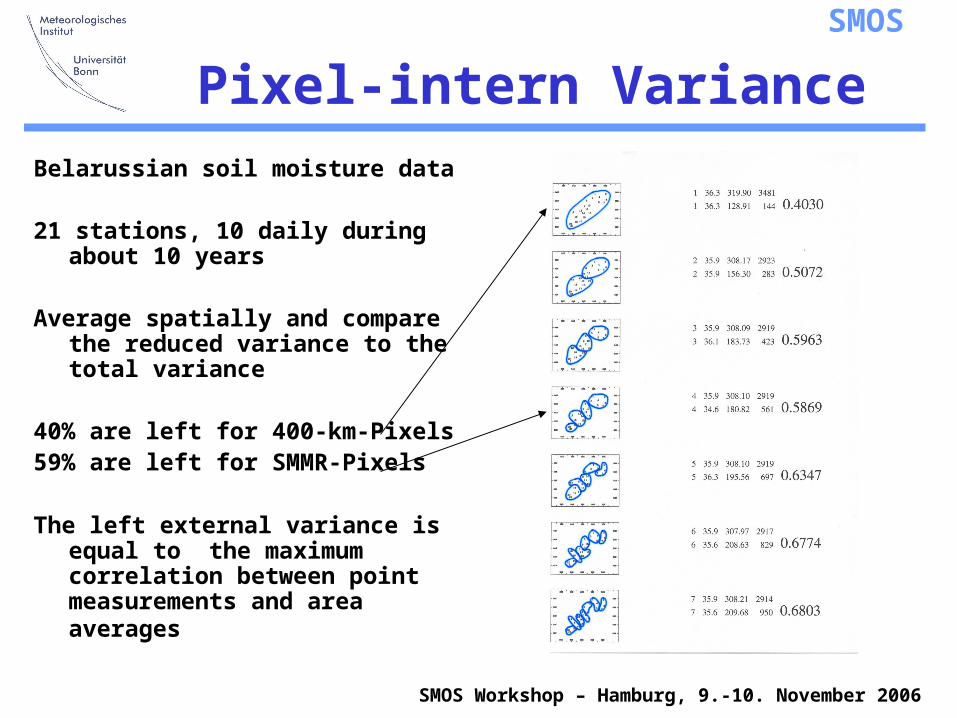
Pixel-intern VarianceBelarussian soil moisture data
21 stations, 10 daily during about 10 years
Average spatially and compare the reduced variance to the total variance
40% are left for 400-km-Pixels59% are left for SMMR-Pixels
The left external variance is equal to the maximum correlation between point measurements and area averages







