

Structural Dynamics & Vibration Control Lab. 1
Kang-Min Choi, Ph.D. Candidate, KAIST, Korea
Jung-Hyun Hong, Graduate Student, KAIST, Korea
Ji-Seong Jo, Section Manager, POSCO E&C, Korea
In-Won Lee, Professor, KAIST, Korea
Active Control for Seismic Response
Reduction Using Modal-Fuzzy Approach
The 18th KKCNN Symposium (2005) Kaohsiung, TaiwanDec. 20-21, 2005

Structural Dynamics & Vibration Control Lab., KAIST, Korea 2
CONTENTS
Introduction
Proposed Method
Numerical Example
Conclusions

Structural Dynamics & Vibration Control Lab., KAIST, Korea 3
Introduction
Death : 14,491 Magnitude : 7.4
• Sumatra, Indonesia (2004)• Sumatra, Indonesia (2004)
Recent Earthquakes
Death : 5,400 Magnitude : 7.2• Kobe, Japan (1995)• Kobe, Japan (1995)
Death : 283,106 Magnitude : 9.0
• Gebze, Turkey (1999)• Gebze, Turkey (1999)
• Kashmir, Pakistan (2005)• Kashmir, Pakistan (2005) Death : 30,000 Magnitude : 7.6
To increase the safety and reliability, structural control is required.

Structural Dynamics & Vibration Control Lab., KAIST, Korea
4 4
• Passive control system
-Vibration control without external power
-Energy dissipation of structure
-No adaptability to various external load
-Large deformation of devices
-Examples: Lead rubber bearing, Viscous damper
• Active control system -Vibration control with external power
-Adaptability to various loading conditions
-Large external power
-Examples: Active mass damper, Hydraulic actuator

Structural Dynamics & Vibration Control Lab., KAIST, Korea
5 5
Control Algorithms
• Active control algorithms
- Linear optimal control algorithm
- Sliding mode control algorithm
- Adaptive control algorithm
- Fuzzy control algorithm
- Modal control algorithm
Structural Dynamics & Vibration Control Lab., KAIST, Korea 6
• Fuzzy control algorithm has been recently proposed for the active structural control of civil engineering systems.
• The uncertainties of input data from the external loads and structural responses are treated in a much easier way by the fuzzy controller than by classical control theory.
• It offers a simple and robust structure for the specification of nonlinear control laws.
Structural Dynamics & Vibration Control Lab., KAIST, Korea 7
• Modal control algorithm represents one control class in which the vibration is reshaped by merely controlling some selected vibration modes.
• Civil structures has hundred or even thousand DOFs. its vibration is usually dominated by first few modes, modal control algorithm is especially desirable for reducing vibration of civil structure.

Structural Dynamics & Vibration Control Lab., KAIST, Korea 8
Conventional fuzzy controller
One should determine state variables which are used as inputs of the fuzzy controller.
- It is very complicated and difficult for the designer to select state variables used as inputs among a lot of state variables.
One should construct the proper fuzzy rule.
- Control performance can be varied according to many kinds of fuzzy rules.

Structural Dynamics & Vibration Control Lab., KAIST, Korea 9
Objective
Development of active fuzzy control algorithm on modal coordinates

Structural Dynamics & Vibration Control Lab., KAIST, Korea 10
Proposed Method
Modal Algorithm- Equation of motion for MDOF system
(2)
- Using modal transformation
(3)
- Modal equation
(4)
Structural Dynamics & Vibration Control Lab., KAIST, Korea 11
(5)
(6)
- Displacement
- State space equation
Controlled displacement
Residual displacement
Structural Dynamics & Vibration Control Lab., KAIST, Korea 12
Modal algorithm is desirable for civil structure.
- Civil structure involves tens or hundreds of thousands DOFs.
- Vibration is dominated by the first few modes.

Structural Dynamics & Vibration Control Lab., KAIST, Korea 13
Active Modal-fuzzy Control System
Structure
Fuzzy Controller
Modal Structure

Structural Dynamics & Vibration Control Lab., KAIST, Korea 14
Modal-fuzzy control system
Input variables
Output variables
Fuzzification
Defuzzification
Fuzzy inference
• Fuzzy inference : membership functions, fuzzy rule
• Input variables : mode coordinates ),(
)( df• Output variable : desired control force

Structural Dynamics & Vibration Control Lab., KAIST, Korea 15
- Development of fuzzy controller on modal coordinates
- Easy to select fuzzy input variables
- Use of information of all DOFs
- Serviceability of modal approach
- Easy to treat the uncertainties of input data
- Robustness of fuzzy controller
Characteristics

Structural Dynamics & Vibration Control Lab., KAIST, Korea 16
Six-Story Building (Jansen and Dyke 2000)
Numerical Example
ControlComputer
gx
6ax
5ax
4ax
3ax
2ax
1axHA
HA
fd
fd
- System data• Mass of each floor
: 0.277 N/(cm/sec2)
• Stiffness
: 297 N/cm
• Damping ratio
: 0.5% for each mode

Structural Dynamics & Vibration Control Lab., KAIST, Korea 17
Frequency Response Analysis
0
4000
8000
12000
0 2 4 6 8 10
- Under the scaled El Centro earthquake
1st F
loo
r6th
Flo
or
Frequency, Hz Frequency, Hz Frequency, Hz
103
104102
105 107
106
12
8
4
0
200000
400000
600000
800000
1000000
0 2 4 6 8 10
0
20000000
40000000
60000000
80000000
0 2 4 6 8 10
0
200
400
600
800
0 2 4 6 8 10
0
10000
20000
30000
40000
50000
0 2 4 6 8 10
0
1000000
2000000
3000000
4000000
5000000
0 2 4 6 8 10
10
8
6
4
2
8
6
4
2
5
4
3
2
1
5
4
3
2
1
8
6
4
2
PS
DP
SD
PS
DP
SD
PS
DP
SD
PSD of Displacement PSD of Velocity PSD of Acceleration

Structural Dynamics & Vibration Control Lab., KAIST, Korea 18
• In frequency analysis, the first mode is dominant.
- The responses can be reduced by modal-fuzzy control using the lowest one mode.

Structural Dynamics & Vibration Control Lab., KAIST, Korea 19
Active Optimal Controller Design (LQR)• Cost function
0
1lim dtRffQyyEJ cc
(7)
22IRwhere
Q : placing a weighting 9000(cm-2) on the relative displacements of all floors

Structural Dynamics & Vibration Control Lab., KAIST, Korea 20
Active Modal-fuzzy Controller Design
• Input variables : first mode coordinates• Output variable : desired control force
),( 11
• Fuzzy inference
)( df
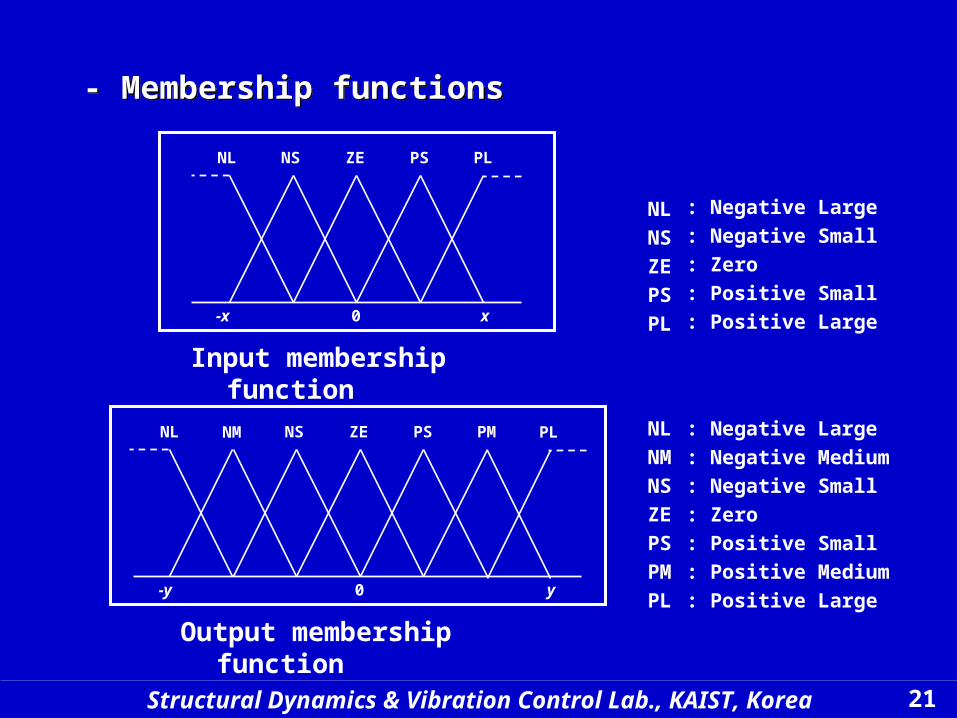
• Membership function
- A type : triangular shapes (inputs: 5MFs, output: 5MFs)
- B type : triangular shapes (inputs: 5MFs, output: 7MFs)
A type : for displacement reductionB type : for acceleration reduction
Structural Dynamics & Vibration Control Lab., KAIST, Korea 21
- Membership functions- Membership functions
NL NS ZE PS PL
-x x0
Input membership function
Output membership function
NL NS ZE PS PM
-y y0
NM PL
: Negative Large
: Negative Small
: Zero
: Positive Small
: Positive Large
NL
NS
ZE
PS
PL
: Negative Large
: Negative Medium
: Negative Small
: Zero
: Positive Small
: Positive Medium
: Positive Large
NL
NM
NS
ZE
PS
PM
PL

Structural Dynamics & Vibration Control Lab., KAIST, Korea 22
• Fuzzy rule
- A type
NL NS ZE PS PL
NL PL PL PM PS ZE
NS PL PM PS ZE NS
ZE PM PS ZE NS NM
PS PS ZE NS NM NL
PL ZE NS NM NL NL
- B type
1
1
NL NS ZE PS PL
NL PL PL PS PS ZE
NS PL PS PS ZE NS
ZE PS PS ZE NS NS
PS PS ZE NS NS NL
PL ZE NS NL NL NL

Structural Dynamics & Vibration Control Lab., KAIST, Korea 23
Acc
el.
(m
/sec
2)
El Centro(PGA: 0.348g)
0 4 8 12 16 20
-8
-4
0
4
8
- 8
- 4
0
4
8
Input Earthquakes
• Medium amplitude (100% El Centro earthquake)• Medium amplitude (100% El Centro earthquake)
• High amplitude (120% El Centro earthquake)• High amplitude (120% El Centro earthquake)
• Low amplitude (80% El Centro earthquake)• Low amplitude (80% El Centro earthquake)

Structural Dynamics & Vibration Control Lab., KAIST, Korea 24
max,1
)(max
x
txJ i
it
max,2
/)(max
n
ii
it d
htdJ
max,3
)(max
ai
ai
it x
txJ
W
tfJ i
it
)(max
,4
Normalized maximum floor displacement
Normalized maximum inter-story drift
Normalized peak floor acceleration
Maximum control force normalized by the weight of the structure
- Evaluation criteria are used in the second generation linear control problem for buildings (Spencer et al. 1997)
Evaluation Criteria

Structural Dynamics & Vibration Control Lab., KAIST, Korea 25
0
1
2
3
4
5
6
0 0.1 0.2 0.3 0.4 0.5
Peak interstory drift (cm)
Flo
or
of
stru
ctur
e
Uncontrolled
LQR
Modal-fuzzy A
Modal-fuzzy B
Control Results
Fig. 1 Peak responses of each floor of structure to scaled El Centro earthquake
Peak interstory drift (cm)
Flo
or
of
stru
ctu
re
0
1
2
3
4
5
6
0 100 200 300Peak absolute acceleration (cm/sec 2̂)
Flo
or
of
stru
ctur
e
Uncontrolled
LQR
Modal-fuzzy A
Modal-fuzzy B
Peak absolute acceleration (cm/s2)
Flo
or
of
stru
ctu
re
Structural Dynamics & Vibration Control Lab., KAIST, Korea 26
- Though the proposed Type A performs significantly better than other systems restricted within the interstory drift, but the performance of peak acceleration is not good.
- A well designed proposed Type B balances the benefits of the different objectives within the requirements of the specific design scenario.
• Observations

Structural Dynamics & Vibration Control Lab., KAIST, Korea 27
Control strategy J1 J2 J3 J4
Optimal LQR
Active Modal-fuzzy control (A type)
Active Modal-fuzzy control (B type)
0.479
0.343
0.548
0.626
0.562
0.635
0.685
1.186
0.601
0.0178
0.0178
0.0134
• Medium amplitude• Medium amplitude

Structural Dynamics & Vibration Control Lab., KAIST, Korea
28 28
0
0.3
0.6
0.9
1.2
1.5
J1 J2 J3
LQRA typeB type
- Performance of proposed Type B is comparable to optimal control.
- Control force is relatively small compared to those of other controllers.
• Observations
J1 J2 J3
Evaluation criteria
Re
du
ctio
n f
ac
tor
J4×10

Structural Dynamics & Vibration Control Lab., KAIST, Korea 29
Control strategy J1 J2 J3 J4
Optimal LQR
Active Modal-fuzzy control (A type)
Active Modal-fuzzy control (B type)
0.479
0.374
0.607
0.610
0.594
0.623
0.912
1.545
0.701
0.0178
0.0178
0.0134
• High amplitude• High amplitude
0
0.4
0.8
1.2
1.6
2
J1 J2 J3
LQR
A typeB type
J1 J2 J3
Evaluation criteria
Re
du
ctio
n f
ac
tor
J4×10

Structural Dynamics & Vibration Control Lab., KAIST, Korea 30
• Low amplitude• Low amplitude
Control strategy J1 J2 J3 J4
Optimal LQR
Active Modal-fuzzy control (A type)
Active Modal-fuzzy control (B type)
0.474
0.289
0.504
0.657
0.573
0.624
0.586
1.386
0.773
0.0178
0.0178
0.0134
0
0.4
0.8
1.2
1.6
J1 J2 J3
LQR
A type
B type
J1 J2 J3
Evaluation criteria
Re
du
ctio
n f
ac
tor
J4×10

Structural Dynamics & Vibration Control Lab., KAIST, Korea
31 31
- Proposed method Type B gives comparable performance to optimal controller.
- Moreover, it is much easier to design control system than optimal controller.
• Observations
- Control force is relatively small compared to those of other controllers.
Structural Dynamics & Vibration Control Lab., KAIST, Korea
32 32
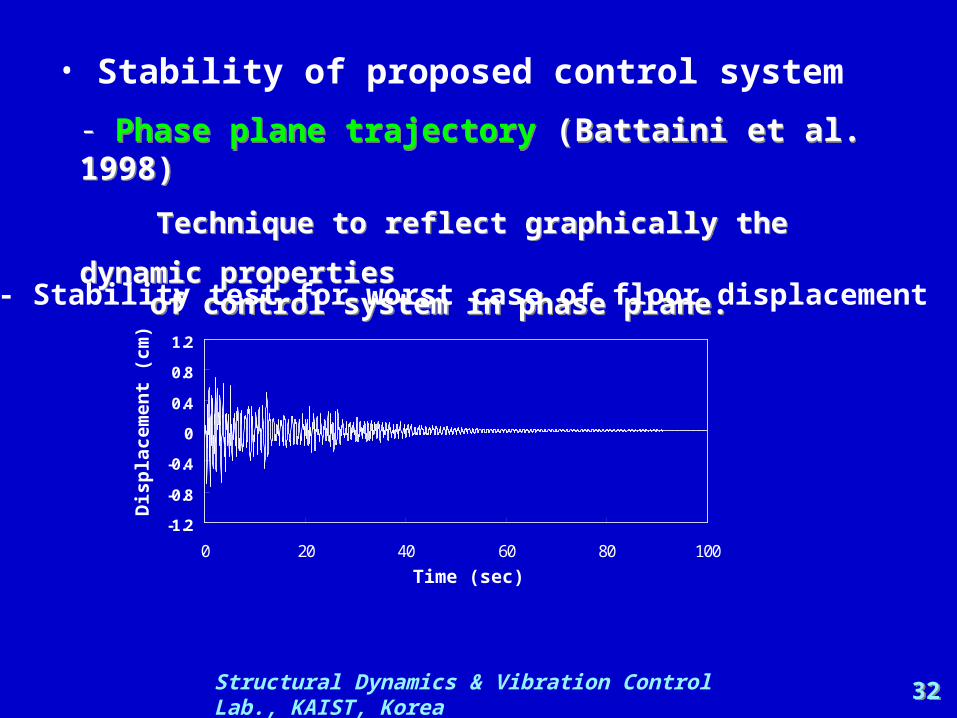
- Phase plane trajectory (Battaini et al. 1998)
Technique to reflect graphically the dynamic properties of control system in phase plane.
- Phase plane trajectory (Battaini et al. 1998)
Technique to reflect graphically the dynamic properties of control system in phase plane.
- Stability test for worst case of floor displacement
• Stability of proposed control system
Dis
pla
cem
ent
(cm
)
Time (sec)
-1.2
-0.8
-0.4
0
0.4
0.8
1.2
0 20 40 60 80 100
Structural Dynamics & Vibration Control Lab., KAIST, Korea
33 33
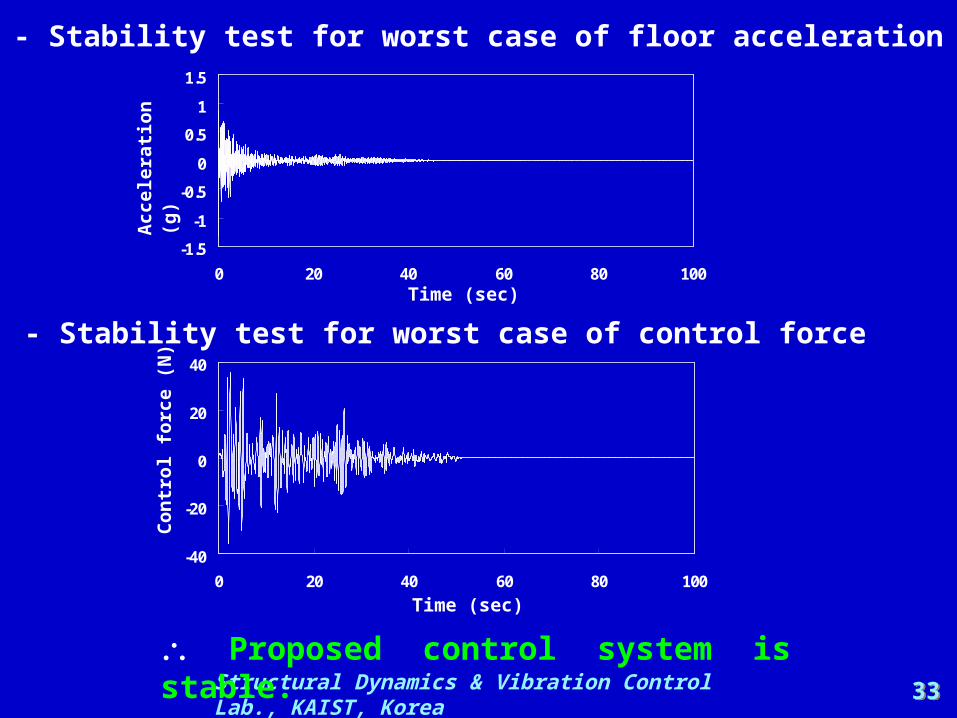
- Stability test for worst case of floor acceleration
- Stability test for worst case of control force
Proposed control system is stable.
Acc
eler
atio
n (
g)
Time (sec)
Co
ntr
ol
forc
e (N
)
Time (sec)
-1.5
-1
-0.5
0
0.5
1
1.5
0 20 40 60 80 100
-40
-20
0
20
40
0 20 40 60 80 100

Structural Dynamics & Vibration Control Lab., KAIST, Korea 34
Conclusions
• A new active modal-fuzzy control strategy for seismic response reduction is proposed.
• Verification of the proposed method has been investigated according to various amplitude earthquakes.

Structural Dynamics & Vibration Control Lab., KAIST, Korea 35
• The performance of proposed method is comparable to optimal controller.
• The proposed method is convenient, simple and easy to apply to real civil structures.

Structural Dynamics & Vibration Control Lab., KAIST, Korea 36
Thank you
for your attention!







