

The Equivalence between fuzzy logic controllers and PD controllers for
single input systems
Professor: Chi-Jo Wang
Student: Nguyen Thi Hoai Nam
Student ID: MA02B202

OUTLINE
I. Fuzzy Logic Overview
II. Constructing a Fuzzy Logic Controller
III. Practical example on Matlab/simulink environment
IV. Conclusions
V. Reference

I. Fuzzy Logic Overview
Fuzzy logic is a logic that describes fuzziness. As fuzzy logic attempts to model humans’ sense of words, decision making and common sense, it is leading to more human intelligent machines.
Fuzzy logic was introduced by Jan Lukasiewicz in the 1920s, scrutinised by Max Black in the 1930s, and rediscovered, extended into a formal system of mathematical logic and promoted by Lotfi Zadeh in the 1960s
Fuzzy logic is a set of mathematical principles for knowledge representation based on degrees of membership rather than on the crisp membership of classical binary logic. Unlike two-valued Boolean logic, fuzzy logic is multivalued

A fuzzy set is a set with fuzzy boundaries, such as short, average or tall for men’s height. To represent a fuzzy set in a computer, we express it as a function and then map the elements of the set to their degree of membership. Typical membership functions used in fuzzy expert systems are triangles and trapezoids.
A linguistic variable is used to describe a term or concept with vague or fuzzy values. These values are represented in fuzzy sets
Fuzzy rules are used to capture human knowledge. A fuzzy rule is a conditional statement in the form:
IF x is A THEN y is B
where x and y are linguistic variables and A and B are linguistic values determined by fuzzy sets.
I. Fuzzy Logic Overview

Fuzzy inference is a process of mapping from a given input to an output by using the theory of fuzzy sets. The fuzzy inference process includes four steps: fuzzification of the input variables, rule evaluation, aggregation of the rule outputs and defuzzification
The two fuzzy inference techniques are the Mamdani and Sugeno methods. The Mamdani method is widely accepted in fuzzy expert systems for its ability to capture expert knowledge in fuzzy rules. However, Mamdani-type fuzzy inference entails a substantial computational burden
I. Fuzzy Logic Overview

To improve the computational efficiency of fuzzy inference, Sugeno used a single spike, a singleton, as the membership function of the rule consequent. The Sugeno method works well with optimisation and adaptive techniques, which makes it very attractive in control, particularly for dynamic nonlinear systems
Why Should We Use Fuzzy Controllers?
• Very robust
• Can be easily modified
• Can use multiple inputs and outputs sources
• Much simpler than its predecessors
• Very quick and cheaper to implement
I. Fuzzy Logic Overview

II. Constructing a Fuzzy Logic Controller
For a single input and single output system, we prove that when a proportional derivative (PD) controller is given, one can design a fuzzy logic controller whose output is identical to that of the PD controller. We also prove that if a fuzzy logic controller using specified fuzzy logic operations is given, there is a PD controller whose output is identical to that of the fuzzy logic controller
How do we design the fuzzy logic controllers has the respond similar to PD controllers?
The relationship between Kd, Kp, and the inputs, output of fuzzy controller through Differential equation:

Create the membership values
We will only be considering single input and single output systems whether they are linear or nonlinear. Our fuzzy sets will always be triangular (spike) functions defined on equally spaced points (Fig. 1).
Figure 1: Fuzzy sets will always be triangular functions defined on equally spaced points
Where:
and k = i+j-1
II. Constructing a Fuzzy Logic Controller

1. Without scaling factor
Let
From
We have
Where: e(n) must be bounded in an interval [ ,]e(n) must be bounded in an interval [ ,] u(n) must be bounded in an interval [ ,]
II. Constructing a Fuzzy Logic Controller

2. Scaling factor
Let
II. Constructing a Fuzzy Logic Controller
From and
We have𝑢 (𝑛)=0.5𝑆𝑢𝑆𝑒𝑒 (𝑛)+0.5𝑆𝑢𝑆𝑑∆ 𝑒 (𝑛)

Specify the rule table
Our fuzzy control rules will be of the form:
Where k = i+j-1
Table 1: Fuzzy control rules
II. Constructing a Fuzzy Logic Controller
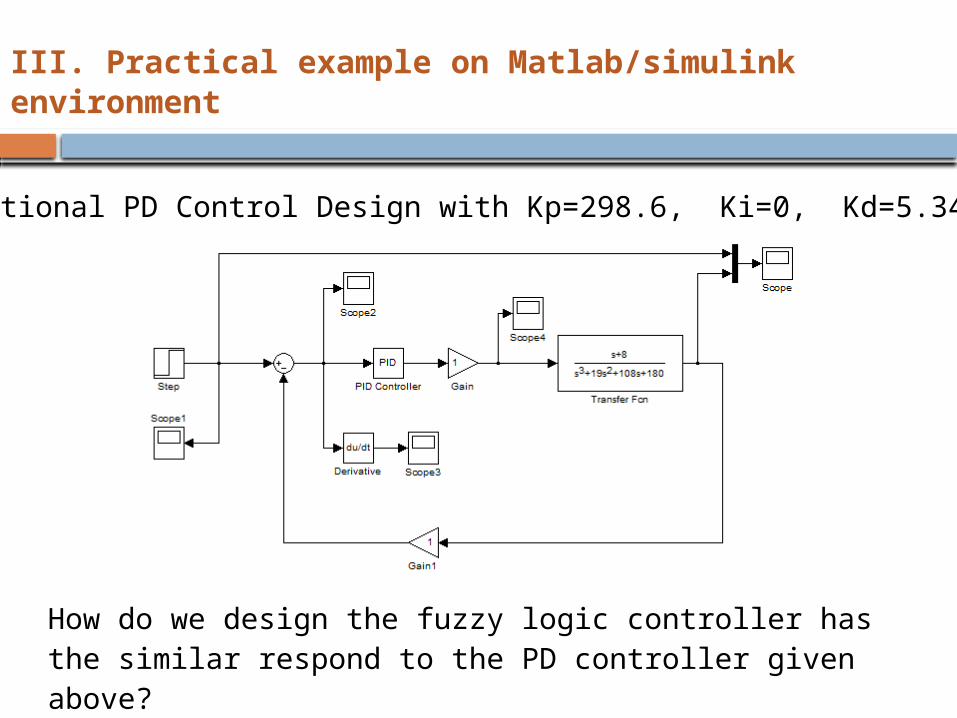
III. Practical example on Matlab/simulink environment
Traditional PD Control Design with Kp=298.6, Ki=0, Kd=5.34
How do we design the fuzzy logic controller has the similar respond to the PD controller given above?

Command and Output (Scope)
Error (Scope2):0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
reference
respond of PD controller
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.2
0
0.2
0.4
0.6
0.8
1
1.2
error
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-10
-8
-6
-4
-2
0
2
Derivative of Error
Derivative of Error (Scope3):
Controller Output (Scope4):
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
100
150
200
250
300
Controller output
III. Practical example on Matlab/simulink environment

0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4
reference
respond of PD controller
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4
reference
respond of FLC with scaling factor
Respond of PD controller
Respond of FLC with scaling factor
Respond of FLC without scaling factor
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4
reference
respond of FLC without scaling factor
III. Practical example on Matlab/simulink environment

IV. Conclusions
For a single input system, whether it is a linear or a nonlinear system, we have shown that one can construct a fuzzy logic controller equivalent to a given PD controller, and that a fuzzy logic controller designed with prescribed fuzzy logic operations is essentially a PD controller.
In practice, however, one often finds that a fuzzy logic controller performs better than a PD controller even for a single input system.

V. Reference
[1] Byung Soo Moon, "Equivalence between fuzzy logic controllers
and PI controllers for single input systems“, Fuzzy Sets and
Systems, 69 (1995) 105 113
[2] Michael Negnevitsky,” Artificial Intelligence, A guide to
Intelligent Systems“, Addison Wesley
[3]
http://faculty.stut.edu.tw/~tang/project/paper/09_Equivalence_FL
C.pdf








