

Towards an Understanding of the Impact of Autonomous Path
Planning on Victim Search in USAR
Paul Scerri, Prasanna Velagapudi, Katia Sycara, Huadong Wang, Shih-Yi James Chien and Michael
Lewis
Robotics Institute, Carnegie Mellon UniversitySchool of Information Sciences, University of
Pittsburgh

Urban Search and Rescue
• Focus on Chemical, Biological, Radiological, Nuclear events
• Use multiple robots to search for victims in dangerous urban disaster environment
• Complex environment means that humans are required
Operator Tasks
• Operator has several independent tasks
• Processing vision data (identifying victims/problems)
• Rescuing stuck or broken robots (trapped under chairs or high centered)
• Planning exploration
• Coordinating robots

Increasing Robot:Operator Ratio
• Operators are extremely expensive compared to robots
• Easier to get more robots than more operators
• Robots spend much of their time moving slowly between locations
• Operator time is not efficiently utilized
• Unpredictably required

Autonomous Path Planning
• Robots are already performing SLAM w/ LIDAR data
• Allow robots to plan their own paths, to cooperatively explore the environment
• Path planning is mature, reasonably reliable in some environments
• Suspect that operators spend a lot of effort thinking about path planning, for little gain

Tradeoffs of Autonomy
• Large amount of operator time saved, corresponding increase in efficiency
• Robots use abstracted data to decide where to explore, human insight/semantic knowledge might be more efficient
• Operators may lose some situational awareness if they don’t need to control robots

Lattice Planning
• Straightforward implementation of published algorithms
• Nodes valued by expected information gain of going to that location
• Edges valued by probability of traversing safely
• Thresholded, with bias against paths of other robots
• Branch and bound search to find path that maximizes information gain
• Some limits on path length, preference for straightness, etc.

Nodes Edges Occupancy grid
Path

USARSim
• High-fidelity simulator based on Unreal Tournament
• Real-time physics with physics card
• Open source, freely available
• Maintained by NIST

Experiment Design
• 60 paid subjects in 30 teams of 2 used both designs
• 24 P3ATs, 25 min., large office environment, find/mark victims
• Auto:
• Path planner, with operator able to teleop or waypoint plan
• Manual:
• Waypoint planning for each robot, teleop when required

Thumbnails for each
robotEnlarged video and teleop
Map and Victim Marking


More Area Explored
Auto Manual
(p < 0.001)
(Manual condition: 4.26 robots ignored)

More Victims Found
Auto Manual
(p = 0.003)
(Same victims/area in both groups)
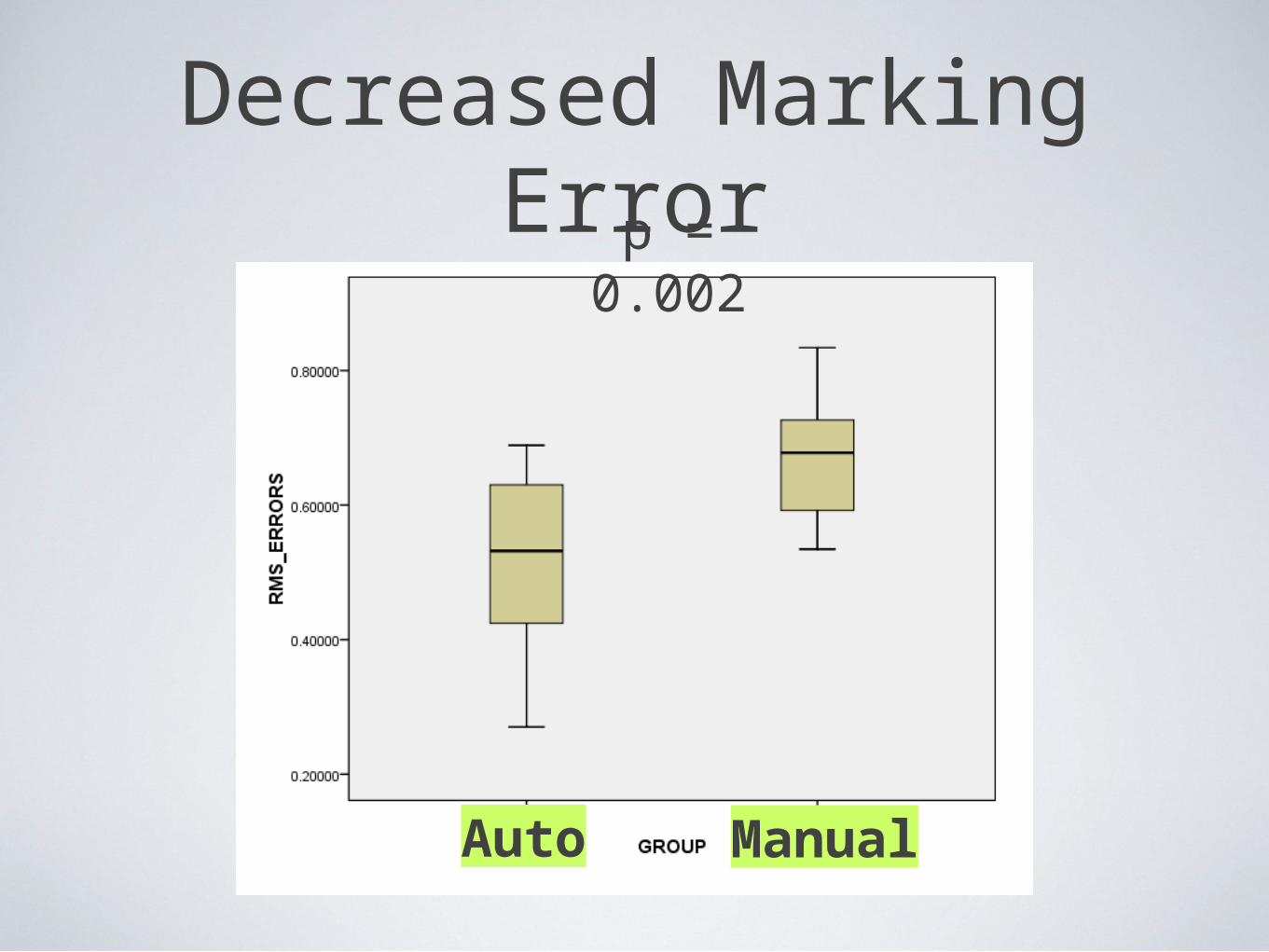
Decreased Marking Error
Auto Manual
p = 0.002

Same Workload
Auto Manual

Conclusions
• Autonomous path planning a useful way of reducing operator load when environment allows it
• Benefits (faster planning, handling more robots) outweigh costs (loss of situation awareness, lack of human insight)
• Operator’s time taken up with other activities
• Not clear they fully exploit all robots
• Future focus on data presentation/visualization







