9/2004 Strickler, et. al 1 econstruction of Modular Coil Shap nd Control of Vacuum Islands in NCS Strickler, S. Hirshman, B. Nelson, D. Williamson, L. Berry, J. Lyon Oak Ridge National Laboratory 9/2004
Transcript
9/2004 Strickler, et. al 1
Reconstruction of Modular Coil Shapeand Control of Vacuum Islands in NCSX
D. Strickler, S. Hirshman, B. Nelson, D. Williamson, L. Berry, J. Lyon
Oak Ridge National Laboratory9/2004
9/2004 Strickler, et. al 2
Topics
1. Determination of modular coil shape from
magnetic field measurements
2. Optimization of the vacuum magnetic field configuration with respect to coil
orientation and currents.
9/2004 Strickler, et. al 3
1. Shape reconstruction of (as-built) modular
coils from magnetic measurements
• Linear method– Find corrections to design coil coordinates– SVD
• Nonlinear method– Parameterization of coil centerline– Fourier or cubic spline representation – Use Levenberg-Marquardt to find coefficients
9/2004 Strickler, et. al 4
Measure B=(Bx,By,Bz) or │B│ on 3D grid enclosing design coil shape
Example: NCSX modular coil M1• Uniform grid spacing of 5 cm in each coordinate direction • ~3500 field measurement points within 20–25 cm of design coil centerline
Side view Top view
9/2004 Strickler, et. al 5
Test procedures on NCSX modular coil M1 with known shape distortion
Sine, cosine coil distortions :• ΔR = δr sin (mθ)• Δφ = δφ sin (mθ)• ΔZ = δz sin (mθ)
Design coil (solid)Distorted coil (dashed)
m=5δr = δφ = δz = 5 mm
Side view Top view
Include random error in:•Magnetic field meaurements•Location of measurements
c = [ax0,ax1,bx1, … ,azn, bzn]T vector of coefficients
B = B(c) magnetic field over 3D grid
Minimize χ2 = ║B(c) – B1║2 B1 = field measurements on 3D grid
Nonlinear MethodSolve for coefficients in parameterization of coil winding center
• Levenberg-Marquardt method to solve for coefficients• Initial guess for c based on fit to design coil data• Option in code for cubic spline representation: x(t) = ∑ cx,k Bk(t), …
9/2004 Strickler, et. al 11
Sensitivity of solution to initial approximation
• Define design coil by Fourier series (e.g., fit to NCSX modular coil 1 coordinates, total Nc=159 coefficients)
• Create distorted coil by changing single coefficient ( e.g., ay,1 = ay,1
(design) + Δay )
• Reconstruct distorted coil shape from magnetic measurements with initial approximation to solution given by:
• Distorted coil described by N segments, unit tangent vectors ed
• Evaluate solution (approximating field of distorted coil) at N points x• For each point xd on distorted coil, find nearest solution point x*, and perpendicular distance from solution point to distorted coil:
x║ = [( x* – xd )∙ed ]ed
x┴ = x* – xd - x║
d = 1/N ∑i║xi┴║
9/2004 Strickler, et. al 15
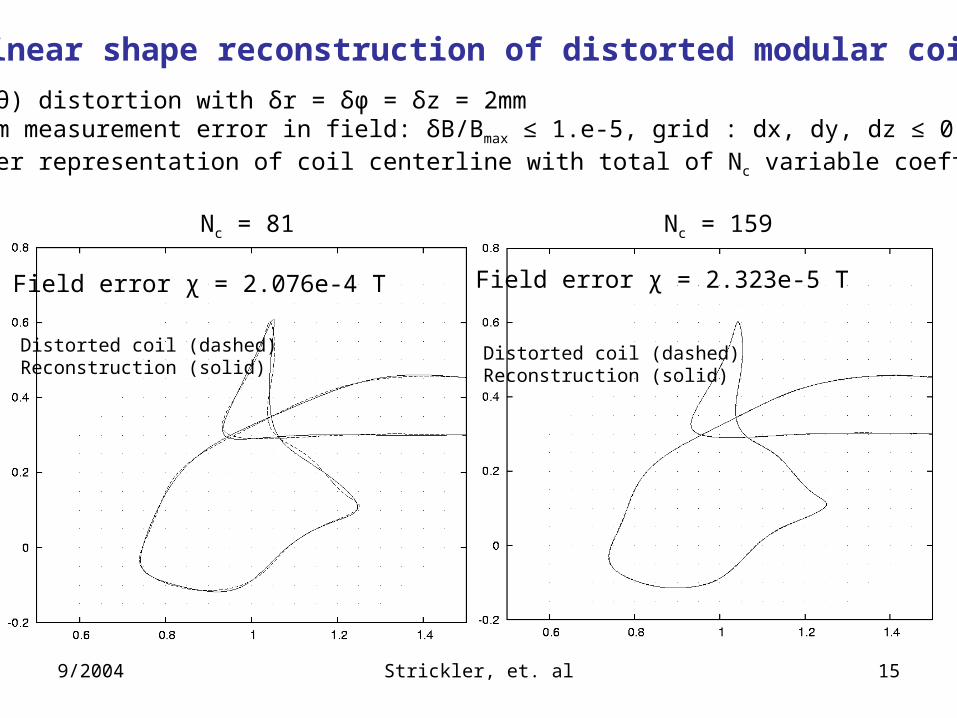
Nonlinear shape reconstruction of distorted modular coil M1
• sin(5θ) distortion with δr = δφ = δz = 2mm• Random measurement error in field: δB/Bmax ≤ 1.e-5, grid : dx, dy, dz ≤ 0.1 mm• Fourier representation of coil centerline with total of Nc variable coefficients
Distorted coil (dashed)Reconstruction (solid)
Field error χ = 2.323e-5 T
Distorted coil (dashed)Reconstruction (solid)
Field error χ = 2.076e-4 T
Nc = 81 Nc = 159
9/2004 Strickler, et. al 16
Nonlinear shape reconstruction of distorted modular coil M1
• sin(5θ) distortion with δr = δφ = δz = 2mm• Random measurement error in field: δB/Bmax ≤ 1.e-5• Random error ≤ d in measurement locations : dx, dy, dz
Distorted coil (dashed)Reconstruction (solid)
Field error χ = 2.323e-5 T
Nc = 159, d = 1.0 mm Nc = 159, d = 0.1 mm
Distorted coil (dashed)Reconstruction (solid)
Field error χ = 2.368e-4 T
9/2004 Strickler, et. al 17
d [mm]δB/Bmax χfield [T] ║c – ccoil║
0.0 0.0 1.994e-6 7.453e-3
0.0 1.e-5 2.243e-6 7.505e-3
0.1 1.e-5 2.332e-5 1.238e-2
0.5 1.e-5 1.158e-4 1.790e-2
1.0 1.e-5 2.368e-4 2.136e-2
Nonlinear coil shape reconstruction from magnetic field │B│with random error ≤ d in location of field measurements
• sine coil distortion with m=5, δr = δφ = δz = 0.002m• ccoil = vector of coefficients in fit to distorted coil coordinates• c = solution vector in nonlinear fit to field of distorted coil
9/2004 Strickler, et. al 18
Next
• Apply to multifilament coil with leads
• Test methods on racetrack coil
9/2004 Strickler, et. al 19
2. Optimization of the Vacuum Field Configuration
• Vacuum field constraint used in QPS design optimization
• Recent STELLOPT modifications for vacuum field optimization
• Examples
9/2004 Strickler, et. al 20
A vacuum field constraint in the STELLOPT / COILOPT codeled to a robust Quasi-Poloidal compact stellaratorconfiguration [1] with improved vacuum properties
•Minimize the normal component of vacuum magnetic field at the full-pressure plasma boundary
- Target B = wB|B•n|/|B|, where: n is normal to the full beta VMEC plasma boundary B is the magnetic field due to the coils
•Last-closed vacuum magnetic flux surface encloses a plasma volume exceeding that of the targeted high equilibrium
•Aspect ratio is maintained as is increased
[1] D.J. Strickler, S.P. Hirshman, D.A Spong, et al., Fusion Science and Technology 45 (Jan. 2004)
9/2004 Strickler, et. al 21
QPS vacuum magnetic surface quality improvement
Full-beta (VMEC)plasma boundary
Coil windingsurface
Full plasma boundaryand vacuum surfaces of
QPS configuration withoutthe vacuum constraint
Optimized QPS configuration with vacuum constraint has larger volume of good flux surfaces
Does not targetvacuum island size
9/2004 Strickler, et. al 22
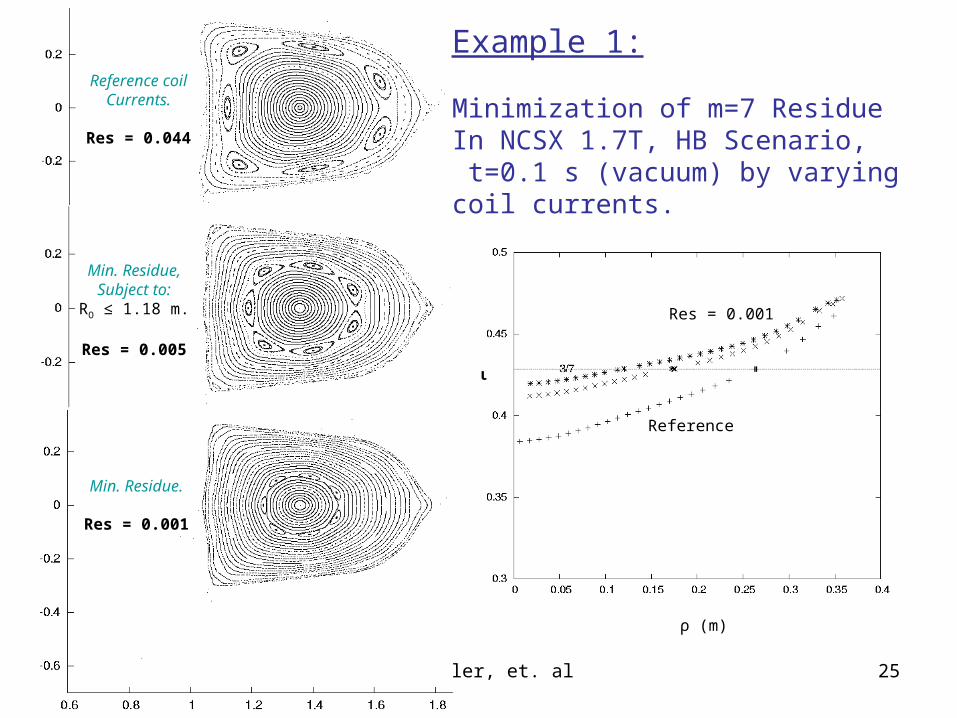
Module (VACOPT) added to stellarator optimization code (STELLOPT) to target resonances in vacuum magnetic field
• Minimize size of vacuum islands resulting from winding geometry errors or displacements due to magnetic loads / joule heating by varying position of modular coils in array.
• Additional variables include rigid-body rotations, shifts about coil centroid, and vacuum field coil currents.
• Targets include residues of prescribed resonances, bounds on variables, and constraints on position of the island O-points.
• Input list now contains poloidal mode number of targeted islands, initial values of vacuum field coil currents, shifts and rotations, and initial positions of control points for each modular coil.
• Output includes positions of control points following optimal shifts / rotations of the modular coils.
9/2004 Strickler, et. al 23
•Magnetic field line is described by dx/ds = B(x)
•In cylindrical coordinates (and assuming Bφ ≠ 0), these are reduced to twofield line equations: dR/dφ = RBR/Bφ , dZ/dφ = RBZ/Bφ
•Integrating the field line equations, from a given starting point (e.g. in a symmetryplane), over a toroidal field period, produces a return map X = M(X) (X = [R,Z]t)
•An order m fixed point of M is a periodic orbit: X = Mm(X)
•The dynamics of orbits in the neighborhood of a fixed point are described bythe tangent map: δX = T(δX)