Page 1
A COMPUTATIONAL FLUID DYNAMICS ANALYSIS OF SIMPLE MATHEMATICALLY DESIGNED HULL FORMS FOR GLIDER
APPLICATIONS
by
Perri Quattrociocchi
Bachelor of Science Oceanography
Florida Institute of Technology 2010
A thesis submitted to the Department of Marine and Environmental Sciences at Florida Institute of Technology in partial fulfillment of the requirements for the degree of
Master of Science In
Ocean Engineering
Melbourne, FL December, 2012
Page 2
We the undersigned committee hereby approve the attached thesis
A Computational Fluid Dynamics Analysis of Simple Mathematically Designed Hull Forms for Glider Applications
by Perri Quattrociocchi
________________________________ Stephen Wood, Ph.D., P.E. Professor and Head, Ocean Engineering Major Advisor, Committee Chair
________________________________ Ronnal Reichard, Ph.D. Professor, Ocean Engineering Director of Laboratories Committee Member
________________________________ Luis Otero, Ph.D. Professor, Engineering Systems Committee Member
Page 3
iii
ABSTRACT
A Computational Fluid Dynamics Analysis of Simple Mathematically Designed
Hull Forms for Glider Applications
by
Perri Quattrociocchi
Committee Chair: Stephen Wood, Ph.D., P.E.
Gliders are long-range, long-term vehicles that gather imperative information for the
commercial, scientific, defense and educational industries. They are cheaper than the
larger, powered Autonomous Underwater Vehicles (AUVs) and can perform many of the
same types of operations, including: inspecting pipelines; surveying cables; locating areas
of interest or specific targets; inspecting underwater contacts; ocean sampling, and
environmental monitoring. Currently, commercial gliders and AUVs are expensive to
purchase and are limited to the manufacturer’s payload due to the vehicle hull
dimensions and proprietary designs. The production of a simple mathematically designed
hull, that can be scalable and easy to build at a low cost, is needed to improve and expand
on the versatility of the gliders. In this study, four glider hulls were created from simple
mathematical equations, resulting in an Elliptical-Parabolic Hull, an Elliptical-Cubic Hull, a
Parabolic-Parabolic Hull and a Parabolic-Cubic Hull. SolidWorks Flow Simulation was used
for the Computational Fluid Dynamics (CFD) analysis at the speeds of 0.1 knot, 0.5 knot
and 1 knot, to find the optimum hydrodynamic efficiency out of the four glider hull
designs.
Page 4
iv
It is hypothesized that the following parameters affect the movement of the vehicle:
Pressure on the hull exerts additional force, dependent on geometry, which the vehicle
must account for in order to move through the water. The velocity along the hull is a
potential indicator of the overall percentage of drag created by the hull’s geometry. The
turbulent viscosity can create drag along the middle section of the hull. The friction
coefficient is a measure of the boundary layer friction occurring on the hull. The drag
force and the corresponding drag coefficients show how much drag is created and how
much that drag affects the vehicle in relation to other forces. The Reynolds Numbers for
each hull at each speed determine whether the movement around the hull is laminar or
turbulent. The goals of this study were aimed at comparing the hulls in terms of the drag
force, corresponding drag coefficient and the resulting Reynolds numbers for each model.
The analysis showed the following: The pressure was found to be of no real significance
due to the low speeds at which the hulls were tested. The velocity results indicated that
the Parabolic Bows may create more efficient streamlining (lower velocity maximums)
through the water, therefore, the least drag across the entirety of the hulls. From the
turbulent viscosity, the Parabolic Tail design created the lowest maximums, yet the effect
on drag was not verifiable. The friction coefficient analysis suggests that the Elliptical-
Parabolic Hull is the optimum choice with a value of 0.02183, while the drag coefficient
suggests that the Elliptical-Cubic Hull is the best with a value of 0.01065. The Reynolds
number was lowest for the Parabolic-Parabolic Hull. Overall, the Elliptical-Parabolic Hull
Page 5
v
rated highly in each viable analysis. The results were too close in each parameter in order
to definitively determine which vehicle was the most hydrodynamically efficient. Despite
lacking in customizability, SolidWorks was deemed a viable tool for CFD. This study is an
essential step to providing a simple mathematically designed glider hull for various
scientific applications. Additional work will be needed to further validate the findings.
Page 6
vi
Table of Contents
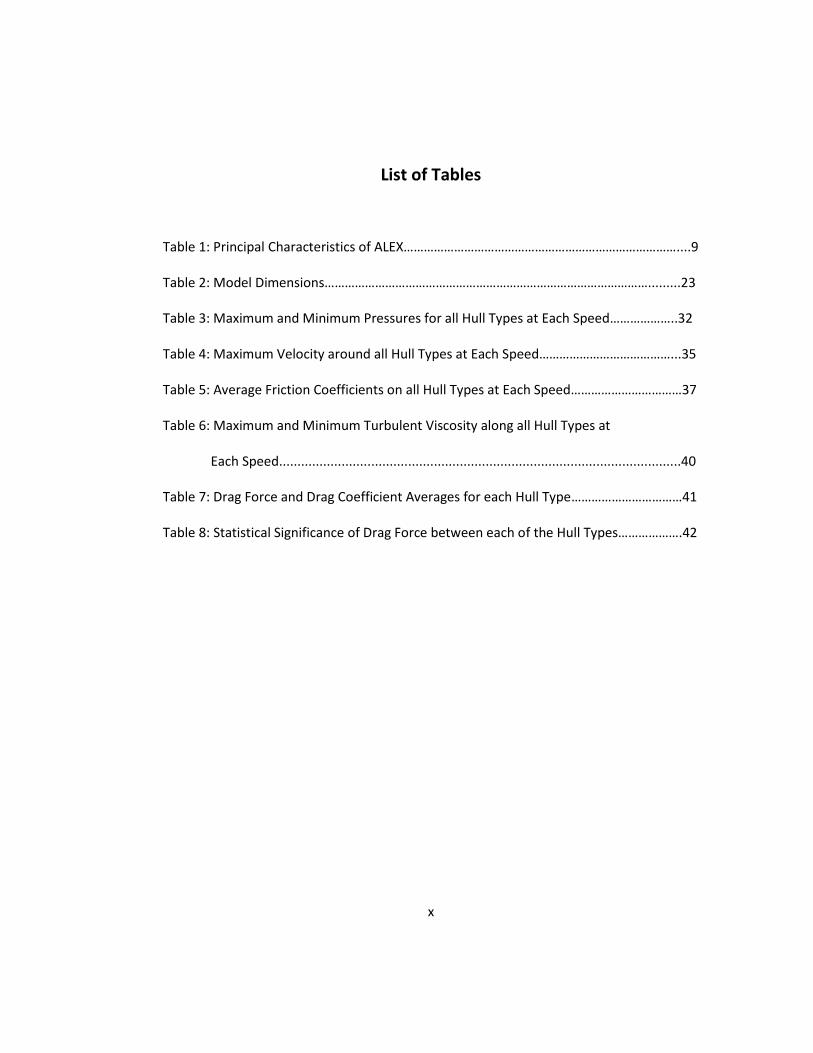
List of Figures…………………………………………………………………………………………………………………viii
List of Tables……………………………………………………………………………………………………………………..x
List of Abbreviations…………………………………………………………………………………………………………xi
List of Symbols…………………………………………………………………………………………………………………xii
Acknowledgements………………………………………………………………………………………………………..xiv
1. Introduction………………………………………………………………………………………………………………….1
1.1 Operation………………………………………………………………………………………………………2
1.2 Experimental Parameters……………………………………………………………………………..3
2. Background…………………………………………………………………………………………………………………..6
3. Hull Forms……………………………….………………………………………………………………………………….20
3.1 Hull Equations………………………………………………………………………………………………21
3.2 Models…..…………………………………………………………………………………………………….22
4. Computational Fluid Dynamics Analysis……………………………………………………………………..24
4.1 Methods………………………………………………………………………………………………………25
4.1.1 Set Conditions………………………………………………………………………………25
4.1.2 Goals…………………………………………………………………………………………….26
5. Results………………………………………………………………………………………………………………………..29
5.1 Pressure……………………………………………………………………………………………………….29
5.2 Velocity………………………………………………………………………………………………………..32
Page 7
vii
5.3 Friction Coefficient……………………………………………………………………………………..35
5.4 Turbulent Viscosity……………………………………………………………………………………..37
5.5 Drag Force and Drag Coefficient………………………………………………………………….40
5.6 Reynolds Numbers………………………………………………………………………………………43
6. Discussion……………………………………………………………………………………………………………………44
6.1Pressure………………………………………………………………………………………………………..44
6.2 Velocity………………………………………………………………………………………………………..45
6.3 Friction Coefficient……………………………………………………………………………………….46
6.4 Turbulent Viscosity……………………………………………………………………………………….46
6.5 Drag Force, Drag Coefficient and Reynolds Number……………………………………47
7. Conclusions…………………………………………………………………………………………………………………49
8. Future Work……………………………………………………………………………………………………………….51
9. References…………………………………………………………………………………………………………………53
10. Appendix………………………………………………………………………………………………………………….56
Page 8
viii
List of Figures
Figure 1: Teledyne-Webb Slocum Electric Glider dive pattern…………………………………………3
Figure 2: Slocum by Teledyne-Webb………………………………………………………………………………..6
Figure 3: Spray Glider by Bluefin Robotics………………………………………………………………………..7
Figure 4: Seaglider, top and Deepglider, bottom, by APL…………………………………………………7
Figure 5: ALEX Glider…………………………………………………………………………………………………………8
Figure 6: NTU Glider, Version 2A…………………………………………………………………………………….10
Figure 7: USM Glider……………………………………………………………………………………………………….11
Figure 8: SeaDiver II………………………………………………………………………………………………………..12
Figure 9: XRay Flying Wing Glider……………………………………………………………………………………12
Figure 10: Pressure Distributions on the hull of PICASSO………………………………………………15
Figure 11: Rounded Bow sections for PICASSO………………………………………………………………16
Figure 12: Extended Tail sections for PICASSO……………………………………………………………….16
Figure 13: Laminar Flow Body example…………………………………………………………………………..17
Figure 14: Autosub by the National Marine Facilities at USL……………………………………………17
Figure 15: Autosub engineering trials for the ancillary component of drag……………………..18
Figure 16: Elliptical-Parabolic Hull..................................................................................23
Figure 17: Elliptical-Cubic Hull ......................................................................................23
Figure 18: Parabolic-Parabolic Hull................................................................................24
Figure 19: Parabolic-Cubic Hull .....................................................................................24
Page 9
ix
Figure 20: Pressure on the Parabolic-Parabolic Hull at 1 knot (0.514 m/s)………………………30
Figure 21: Pressure on the Parabolic-Cubic Hull at 1 knot (0.514 m/s)…………………………….30
Figure 22: Pressure on the Elliptical-Parabolic Hull at 1 knot (0.514 m/s)………………………..31
Figure 23: Pressure on the Elliptical-Cubic Hull at 1 knot (0.514 m/s)..............................31
Figure 24: Velocity around the Parabolic-Parabolic Hull at 1 knot (0.514 m/s)………………..33
Figure 25: Velocity around the Parabolic-Cubic Hull at 1 knot (0.514 m/s) ……………………..33
Figure 26: Velocity around the Elliptical-Parabolic Hull at 1 knot (0.514 m/s)………………….34
Figure 27: Velocity around the Elliptical-Cubic Hull at 1 knot (0.514 m/s..........................34
Figure 28: Friction Coefficient on the Parabolic-Parabolic Hull at 1 knot (0.514 m/s)........35
Figure 29: Friction Coefficient on the Parabolic-Cubic Hull at 1 knot (0.514 m/s)..............36
Figure 30: Friction Coefficient on the Elliptical-Parabolic Hull at 1 knot (0.514 m/s).........36
Figure 31: Friction Coefficient on the Elliptical-Cubic Hull at 1 knot (0.514 m/s)...............37
Figure 32: Turbulent Viscosity along the Parabolic-Parabolic Hull at 1 knot (0.514 m/s)...38
Figure 33: Turbulent Viscosity along the Parabolic-Cubic Hull at 1 knot (0.514 m/s)……….38
Figure 34: Turbulent Viscosity along the Elliptical-Parabolic Hull at 1 knot (0.514 m/s).....39
Figure 35: Turbulent Viscosity along the Elliptical-Cubic Hull at 1 knot (0.514 m/s)...........39
Figure 36: Drag Force and Drag Coefficients for each Hull Type.........................................41
Figure 37: Reynolds Number for each hull type at each speed……………………………...........43
Figure 38: Pulley system for Pull Test ..…………………………………………………………..................52
Page 10
x
List of Tables
Table 1: Principal Characteristics of ALEX………………………………………………………………………....9
Table 2: Model Dimensions…………………………………………………………………………………….........23
Table 3: Maximum and Minimum Pressures for all Hull Types at Each Speed………………..32
Table 4: Maximum Velocity around all Hull Types at Each Speed…………………………………...35
Table 5: Average Friction Coefficients on all Hull Types at Each Speed……………………………37
Table 6: Maximum and Minimum Turbulent Viscosity along all Hull Types at
Each Speed.............................................................................................................40
Table 7: Drag Force and Drag Coefficient Averages for each Hull Type……………………………41
Table 8: Statistical Significance of Drag Force between each of the Hull Types……………….42
Page 11
xi
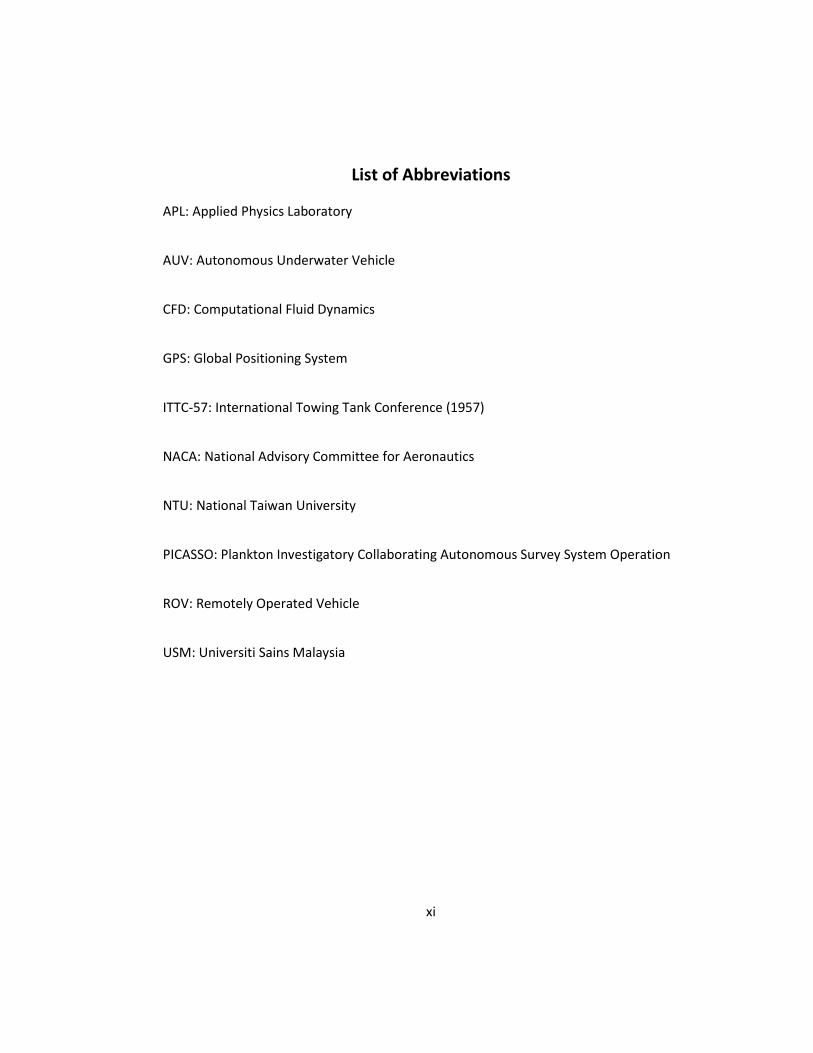
List of Abbreviations
APL: Applied Physics Laboratory
AUV: Autonomous Underwater Vehicle
CFD: Computational Fluid Dynamics
GPS: Global Positioning System
ITTC-57: International Towing Tank Conference (1957)
NACA: National Advisory Committee for Aeronautics
NTU: National Taiwan University
PICASSO: Plankton Investigatory Collaborating Autonomous Survey System Operation
ROV: Remotely Operated Vehicle
USM: Universiti Sains Malaysia
Page 12
xii
List of Symbols
Aw: Wetted surface area
B: Length of bow section
CD: Drag coefficient
CF: Friction resistance coefficient
d: Vessel diameter
FX, FD: Drag force
l: Vessel length
μ: Dynamic viscosity
n: Degrees of freedom
ρ: Density
R: Maximum vehicle radius
ReL: Reynolds number as a function of length
S: Projected Area
: Standard deviation of the data sets
T: Statistical t-value
T: Length of tail section
V, U: Velocity
X: Length
: Mean of the first model
Page 13
xiii
: Mean of the second model
Z: Radius
Page 14
xiv
Acknowledgements
This thesis could not have been completed without the help of a long list of supporters
and helpers.
- To Anthony Jones who not only helped with the creation of this thesis, but was a
constant source of information and support along the way.
- To Dr. Stephen Wood who pushed me to do my best, and constantly reminded me that
working on this study came before anything else.
- To my committee members, Dr. Luis Otero and Dr. Ronnal Reichard who took on this
study despite the time restrictions and difficulties of completing a meaningful thesis in
just a couple months.
- To my parents, Bethany and Michael Quattrociocchi, Kenneth Castoro, Phillip Meyer,
and Anthony Jones for taking the time to help with the editing process.
- To all of the students in the Ocean Engineering Lab who contributed words of wisdom
and support.
Thank you.
Page 15
1
1. Introduction
Over the last couple decades, the need for underwater vehicles has grown dramatically.
These vehicles have critical roles in the oil industry for inspecting pipelines, surveying
cables, and locating areas of interest; in the defense/military industry for surveying varied
environments, locating targets and inspecting underwater contacts; and in the scientific
research field for ocean sampling and environmental monitoring [17]. Starting with
Remotely Operated Vehicles (ROVs) and then Autonomous Underwater Vehicles (AUVs),
the evolution of underwater vehicles has come a long way. Glider type vehicles are in the
infancy of development since their initial introduction in the 1980s with Henry Stommel
[10]. The vehicles can cover greater distances, for longer periods of time with less human
interaction, and with a lower cost than conventional AUVs [15].
With their longer range and lower cost, gliders are an exceptional addition to the
scientific community. Gliders depend on changes in net buoyancy for propulsion, thus
optimizing the hydrodynamics of the hull is a high priority. If the drag becomes too great,
the speed as well as the glider’s ability to propagate through the water at a consistent
rate suffers [25]. Consequently, the hull design is only useful if the hydrodynamics provide
minimal drag. Experimental testing to provide hydrodynamic analysis, such as in tow
tanks and circulating water channels is very time consuming and costly; while
computational fluid dynamics (CFD) analyses are less time consuming and less costly, but
Page 16
2
still provide reliable results [17] provided that the bodies are simple and streamlined as in
the hulls of this study.
1.1 Operation
As the gliders adjust their buoyancy to move up and down, the lift-drag on the wings, hull
and tailfins generate the horizontal movement through the water; creating a saw-toothed
trajectory [27]. The speeds during surveying are typically very low (starting around 0.1
knots or 0.0514 m/s) and generally do not exceed 1 knot (0.514 m/s), depending on the
design. The current glider flight durations range from hours underwater to days. Figure 1
shows Teledyne-Webb’s Slocum Electric Glider, which requires surfacing at least every 24
hours and can only dive to depths of 200 m. The maximum depths of gliders range as well;
currently the average diving depth is around 1000 m.
Page 17
3
Figure 1: Teledyne-Webb Slocum Electric Glider dive pattern [15]
1.2 Experimental Parameters
Hull geometry is a large determinant of how efficiently the vehicle moves through the
water. The drag force and the resulting drag coefficient are two important parameters
that can affect the movement of the vehicle. The goals of the project were aimed in
comparing the hulls in terms of the drag force, corresponding drag coefficient and the
resulting Reynolds numbers for each model. However, there are other parameters to
determine as well. These parameters are:
Page 18
4
Pressure: The pressure on the hull contributes to the force that is obstructing the
vehicle. The greater the pressure, the more power the vehicle needs to push
through the water. Minimizing the pressure at the bow through the hull geometry
can reduce some of the force.
Velocity: Hull geometry’s impact on velocity is very important for the overall
movement of the vehicle. When the wings of the glider are attached, the increase
in velocity along the edges of the hull may allow for greater lift, dependent on
design, and therefore more efficient movement through the water. A study by
D.F. Myring concluded that the bodies which produce higher velocities tend to
exhibit higher percentages of form drag [13]. Thus, the hull with the lowest velocity
maxima may be more hydrodynamically efficient.
Turbulent Viscosity: The turbulent viscosity can influence drag if the bow
produces turbulence against the sides of the cylindrical middle or along the tail.
This parameter can also show the streamlining of the hull by the wake that it
produces. Although this study deals with slower speeds (less than 0.514 m/s),
there is a possibility that turbulence has a slight effect on the drag along the back
end of the hull.
Page 19
5
Friction Coefficient: The friction coefficient is a measure of the boundary layer
friction between the fluid and the hull. This value is very important to the overall
drag since it isolates the areas of higher friction. Simply put, the greater the
friction, the greater the drag. In the case of this study, the friction coefficient
results were expected to decrease with speed and to be on the same order as the
drag coefficient, and therefore of considerable importance.
In order to analyze these various parameters, a CFD analysis of the glider hull forms at
equal volumes is needed. This study used SolidWorks Flow Simulation in order to find the
values for each parameter. The general hull forms were based on simple cubic, elliptical
and parabolic equations for the bow and tail. This resulted in the modeling of a Parabolic-
Parabolic Hull, a Parabolic-Cubic Hull, an Elliptical-Parabolic Hull and an Elliptical-Cubic
Hull. The results of this study were meant to provide a very simple base of equations for
building a hydrodynamically efficient glider hull for various scientific applications.
Page 20
6
2. Background
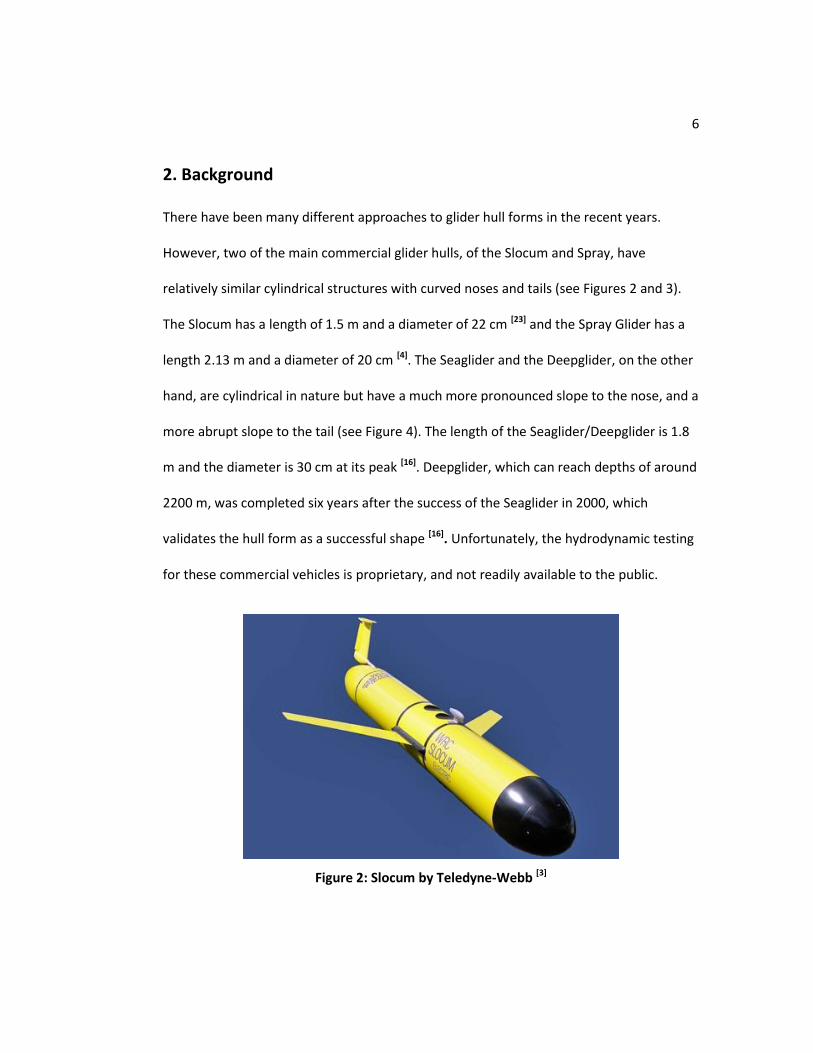
There have been many different approaches to glider hull forms in the recent years.
However, two of the main commercial glider hulls, of the Slocum and Spray, have
relatively similar cylindrical structures with curved noses and tails (see Figures 2 and 3).
The Slocum has a length of 1.5 m and a diameter of 22 cm [23] and the Spray Glider has a
length 2.13 m and a diameter of 20 cm [4]. The Seaglider and the Deepglider, on the other
hand, are cylindrical in nature but have a much more pronounced slope to the nose, and a
more abrupt slope to the tail (see Figure 4). The length of the Seaglider/Deepglider is 1.8
m and the diameter is 30 cm at its peak [16]. Deepglider, which can reach depths of around
2200 m, was completed six years after the success of the Seaglider in 2000, which
validates the hull form as a successful shape [16]. Unfortunately, the hydrodynamic testing
for these commercial vehicles is proprietary, and not readily available to the public.
Figure 2: Slocum by Teledyne-Webb [3]
Page 21
7
Figure 3: Spray Glider by Bluefin Robotics [4]
Figure 4: Seaglider, top and Deepglider, bottom, by APL [1], [16]
Page 22
8
A study in 2009 created the ALEX Glider, which used a nose with a NACA0050 shape (see
Figure 5) that the author dubbed “suitable for modelling [sic] and estimating the
hydrodynamic forces,” but did not provide any supporting research or data for the
specific hull form [2].The hull dimensions of the glider can be seen in Table 1. The study
demonstrates the use of CFD as a reliable tool for estimating hydrodynamic forces on
glider forms, including the lift and drag forces acting on all surfaces, in varied conditions
for all angles of incidence. The authors used a commercial program by Software Cradle
Co., Ltd. called SC/Tetra, which uses three dimensional CFD similar to that of SolidWorks
Flow Simulation. The results of this study were based around the performance of
independently controllable wings; however, since the hull form has a large part to do with
the success of the glider overall, the choice of curvature for the nose cone can be
validated by the positive results of the study.[2]
Figure 5: ALEX Glider [2]
Page 23
9
Table 1: Principal Characteristics of ALEX [2]
Similar to the 2009 study, students at the National Taiwan University developed a glider,
dubbed the NTU Glider, which was focused on the placement and efficiency of the wings.
The hull body was cylindrical with a nose cone and a tail section with identical lengths and
curvature. This hull was not a part of the hydrodynamic testing, and since the results were
purely based on the wing hydrodynamics when placed at different parts of the hull, and
the results were derived from modular mathematical models with no CFD or
experimental testing, the hull form in this study is not necessarily valid. Figure 6 depicts
the generic glider form that the students chose for their project. [5]
Page 24
10
Figure 6: NTU Glider, Version 2A [5]
The Universiti Sains Malaysia (USM) created an underwater glider in 2011 based on the
“Slender-Body Theory” [10]. The Slender-body Theory states that if the diameter is much
less than the length of a straight object, then one can think of the body as a longitudinal
stack of thin sections with an easily computed added mass [24]. This “slender-body” glider
hull had a length of 1.4 m and a diameter of 17 cm (see Figure 7). The authors of this
study used MATLAB to define the drag forces upon the vehicle instead of a CFD program
or experimental testing. Although, mathematically correct, this does not necessarily show
the drag forces on each surface of the vehicle, and it treats the vehicle as a “slender-
body” which creates assumptions to the mass and more finite details. [10]
Page 25
11
Figure 7: USM Glider [10]
The SeaDiver/SeaDiver II Glider and the XRay Flying Wing Glider are two examples of
large-body gliders. These models are generally made for long-term, long-range
deployments. The SeaDiver Glider was originally proposed and built by the University of
Toulon, France, and was tested with help from the Naval Post Graduate School. The
SeaDiver hull was shaped after an airfoil, while the XRay Glider* is shaped more like a
fighter jet plane (See Figures 8 and 9). Unfortunately, the SeaDiver was not proven to be a
valid glider and was found to need further development in both the software systems as
well as the overall hull construction. [8]
* The XRay Flying Wing Glider turned out to be a successful tool for the Office of Naval Research, but no
hydrodynamic analyses were found in the literature.
Page 26
12
Figure 8: SeaDiver II [8]
Figure 9: XRay Flying Wing Glider [1]
Page 27
13
In 2007, authors Phillips, Furlong and Turnock provided a study on hull forms for
AUVs/gliders using three distinct nose cones: circular, 2-1 ellipsoid and 3-1 ellipsoid.
These AUV forms were modeled based on the following equation in order to estimate the
form factor for a streamlined body as a function of vessel length (l) and diameter (d):
(I + k) = I + 1.5(d/I)3/2 + 7(d/I)3
Using this equation allowed the authors to get an initial estimate of the powering
requirements. The forms were created in ANSYS ICEM CFD and the drag of the hulls was
modeled through the Reynolds Averaged Navier-Stokes Equation and analyzed by
Reynolds Number created by each hull. The study was then expanded to include
previously built AUVs, which were analyzed for drag along the hull and compared to
existing experimental results. The results showed that CFD is a valid form of
hydrodynamic testing for all concept hull forms when compared to existing experimental
data. Further, it was found that CFD analysis can also be used “to determine straight line
resistance of bare and appended hull forms; allow rapid comparison of the resistance of
different hull forms at the initial design stage through the use of highly parameterised
geometric models; to complement model test experiments, to gain a clearer
understanding of the origins of measured drag and to help understand the effect of test
conditions on the open water performance of these vehicles; and to provide detailed
Page 28
14
information about the mean flow pattern around the hull which would not normally be
determined from standard towing tank experiments.” [17]
A study in 2010, of PICASSO (Plankton Investigatory Collaborating Autonomous Survey
System Operation), an AUV developed in Japan for the study of deep sea plankton, was
determined to find a way to improve the hydrodynamic efficiency of the vehicle. This
study looked at the water resistance, or the effects of pressure, upon the hull of the
vehicle. Using FLUENT, the flow field was generated around PICASSO. As seen in Figure
10, there was a large amount of pressure on the front of the bow due to the flatness of
the geometry.
Page 29
15
Figure 10: Pressure Distributions on the hull of PICASSO [9]
In order to see the effects of the pressure, the drag coefficient was calculated through the
following equation:
Where the projected area used, S, was defined as the breadth of the fuselage times the
depth of the vehicle, CD is the drag coefficient, FX is the drag force, ρ is density, and V is
Page 30
16
the velocity. In order to reduce the drag coefficient and the effects of pressure, new bow
sections (Figure 11), and tail sections (Figure 12), were proposed by the authors. [9]
Figure 11: Rounded Bow sections for PICASSO. [9]
Figure 12: Extended Tail sections for PICASSO. [9]
The results of changing the fore and aft sections were positive. The best configuration
was found to be the most rounded bow paired with the most extended tail. This study
found many discrepancies between the theoretical and experimental values [9]. The CFD
simulation used appeared adequate; however, due to the discrepancies found, the
equations used in the software needed to be either more accurate or more targeted
towards the preferred outputs.
Page 31
17
In 2007, Stevenson et. al composed a study on the various shapes of AUVs and the
resulting CFD analysis. Two of the studied shapes were a Laminar Flow Body, seen in
Figure 13, and a generic torpedo, or Autosub shape (as seen in Figure 14).
Figure 13: Laminar Flow Body example [21]
Figure 14: Autosub by the National Marine Facilities at USL [14]
Page 32
18
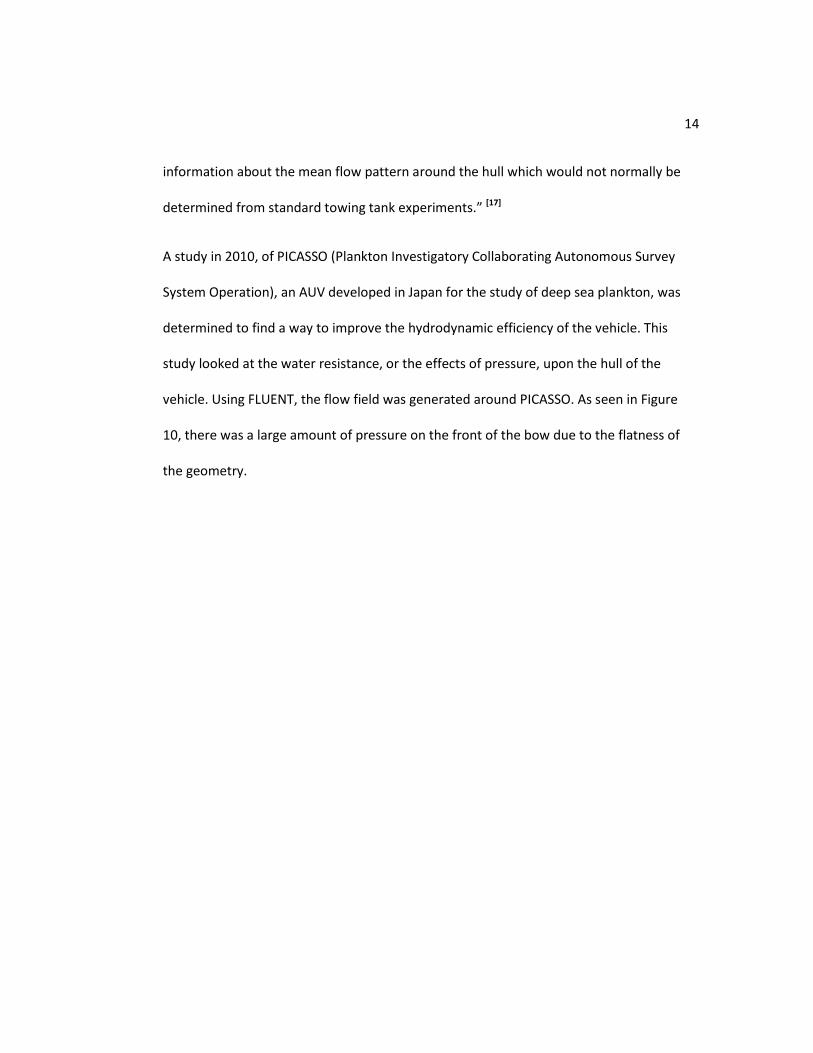
The Autosub shape is very similar to the hulls in this study. After the engineering trials of
the Autosub, it was found that the body creates almost 75% of drag on the vehicle, as
seen in Figure 15.
Figure 15: Autosub engineering trials for the ancillary component of drag [21]
After analyzing the drag coefficients in CFD software, the Laminar Flow Body created a
drag coefficient of 0.0109, while the experimental values at sea showed a drag coefficient
of 0.013-0.015. The Autosub, however, had a CFD analysis result in a drag coefficient of
0.029, not including the external appendages (fins, tail, GPS, etc.). The authors believed
Page 33
19
that the CFD values were slightly lower than the experimental values would and should be
due to antennae, seams, bolts, etc. [21]
The study also took the 4-digit NACA airfoil shapes into consideration. NACA shapes were
developed to standardize the design of aircraft wings. The chosen shapes included the
NACA0010, NACA0020, NACA0033, and NACA0050. It was found that the 4-digit NACA
shapes with a length to diameter ratios between 3 and 4 had resulting drag coefficients of
approximately 0.025 and 0.0195, respectively. The drag coefficients of the forms which
had length to diameter ratios greater than 3 did not differ in value more than around
0.007. [21]
Page 34
20
3. Hull Forms
This study tested the use of varied bow and tail sections on hull forms for hydrodynamic
efficiency. The glider hull designs were created with simple mathematically designed
forms including: an Elliptical Bow with a Parabolic Tail; an Elliptical Bow with Cubic Tail; a
Parabolic Bow with Parabolic Tail; and a Parabolic Bow with Cubic Tail. Since these hulls
should produce the same percentage of drag force at any size, the results of each model
allow for the hulls to be used in a wide range of applications for various payloads.
The main limitation of the glider hulls of the Seaglider and of the designs based on NACA
airfoils is space for payloads. The hulls are wide only at the center of the vehicle and have
very narrow nose and tail sections. The approach in this study allows for the use of varied
payloads by providing a cylindrical middle section that can be increased as long as the
curvature of the nose and tail are subsequently increased. The Slocum and Spray are
based on similar designs to this study; however, their designs are proprietary and not
readily available to the public. Additionally, the Slocum and Spray are only available in
one size. They only allow specific payloads to be used, which can prevent the user from
implementing a specific payload or payload addition; often allowing the parent company
to set high prices for customization and/or upgrades to the payload.
The literature found on the hydrodynamics of gliders tended to focus on the wing designs
instead of the hull design. This is could create problems considering that the movement of
Page 35
21
gliders is dependent on changes in the net buoyancy and the influence of drag, which are
mainly hull related. There is not much literature available for complete hull designs that
are both scalable and fit a large number of applications. This study aimed at trying to
provide this information.
3.1 Hull Equations
This study created four equal volume glider hulls in SolidWorks:
1. Elliptical Bow with Parabolic Tail
2. Elliptical Bow with Cubic Tail
3. Parabolic Bow with Parabolic Tail
4. Parabolic Bow with Cubic Tail
The glider hulls were modeled by using the following formulas mathematically derived by
Anthony Jones [11]:
Elliptical Bow: Parabolic Bow:
√ ( )
Page 36
22
Middle Body:
z=R
Parabolic Tail: Cubic Tail:
( )
( )
Where Z=radius, X=length, B=length of bow section, T=length of tail section, and
R=maximum vehicle radius. The constants included R=0.15 m, T= 0.2 m and B= 0.2 m.
3.2 Models
The cylindrical section of each hull was determined by the volume desired, keeping the
vehicle’s length at a minimum of 1 m, and diameter at 0.3 m. The bow and tail sections
were kept at lengths of 0.2 m for all models. These dimensions are based off of the
average payload need for the three commercial gliders: Spray, Slocum and Seaglider, as
well as the results of the Stevenson study, where it was found that as long as the length
to diameter ratio is between 3 and 4, the effect on the drag coefficient should be minimal
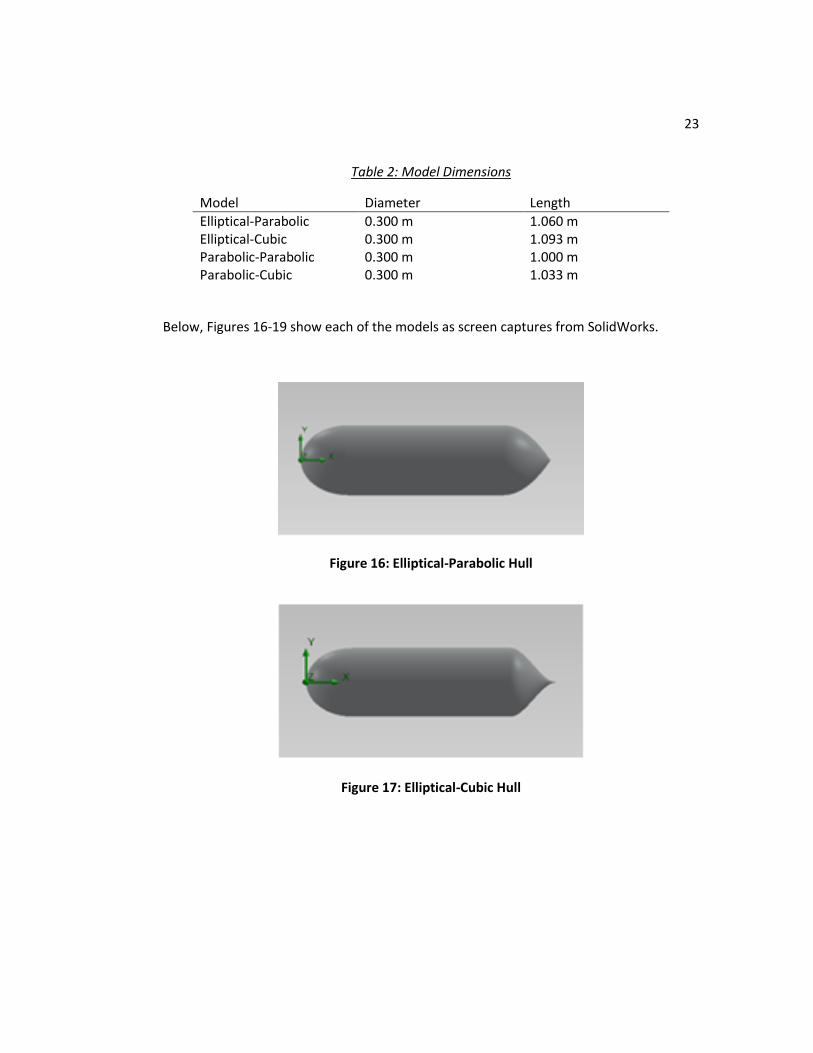
[21]. The volume for the vehicles was a constant 0.06 m3. Table 2 shows the final
measurements of each model.
Page 37
23
Table 2: Model Dimensions
Model Diameter Length
Elliptical-Parabolic 0.300 m 1.060 m Elliptical-Cubic 0.300 m 1.093 m Parabolic-Parabolic 0.300 m 1.000 m Parabolic-Cubic 0.300 m 1.033 m
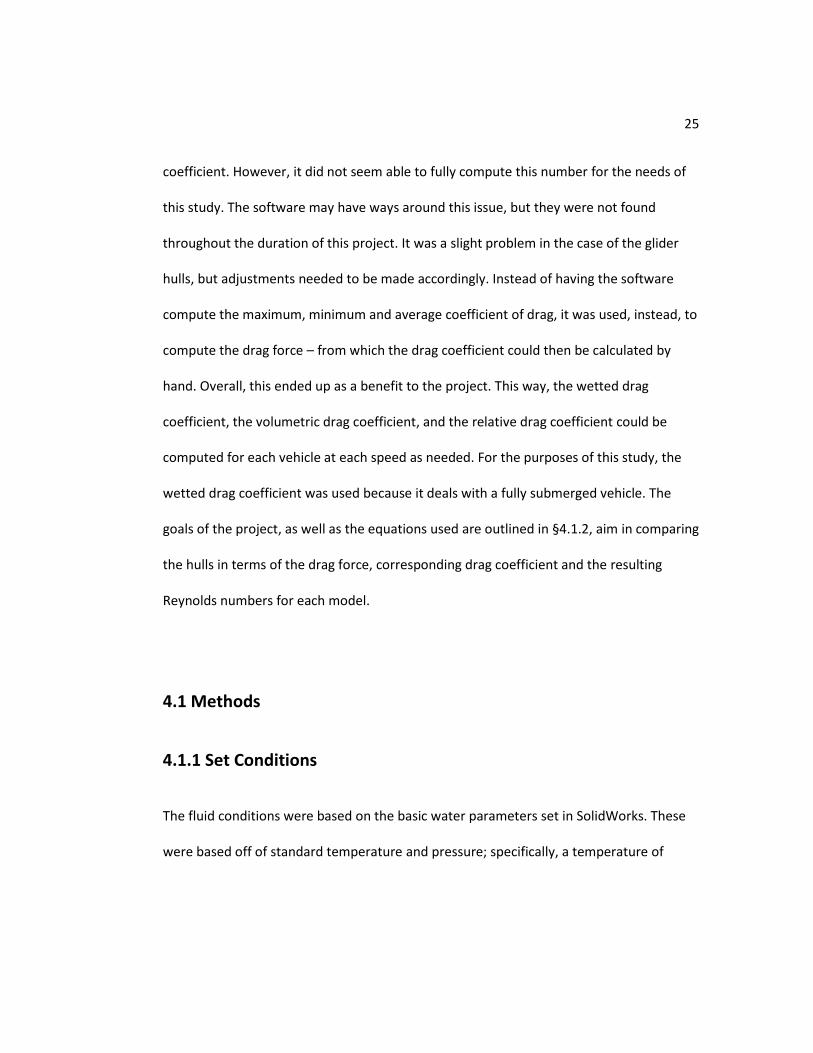
Below, Figures 16-19 show each of the models as screen captures from SolidWorks.
Figure 16: Elliptical-Parabolic Hull
Figure 17: Elliptical-Cubic Hull
Page 38
24
Figure 18: Parabolic-Parabolic Hull
Figure 19: Parabolic-Cubic Hull
4. Computational Fluid Dynamics Analysis
SolidWorks Flow Simulation is not a fully customizable software in terms of mathematical
analysis for CFD applications. The software uses its own equations to deal with friction,
drag, viscosity, etc. It allows goal equations to be made, but does not allow changes to the
default equations. This makes the software easier to use in terms of basic analyses, but
more difficult when dealing with the finer aspects of CFD. An example of this is computing
the coefficient of drag. The software uses an equation based goal to determine the
Page 39
25
coefficient. However, it did not seem able to fully compute this number for the needs of
this study. The software may have ways around this issue, but they were not found
throughout the duration of this project. It was a slight problem in the case of the glider
hulls, but adjustments needed to be made accordingly. Instead of having the software
compute the maximum, minimum and average coefficient of drag, it was used, instead, to
compute the drag force – from which the drag coefficient could then be calculated by
hand. Overall, this ended up as a benefit to the project. This way, the wetted drag
coefficient, the volumetric drag coefficient, and the relative drag coefficient could be
computed for each vehicle at each speed as needed. For the purposes of this study, the
wetted drag coefficient was used because it deals with a fully submerged vehicle. The
goals of the project, as well as the equations used are outlined in §4.1.2, aim in comparing
the hulls in terms of the drag force, corresponding drag coefficient and the resulting
Reynolds numbers for each model.
4.1 Methods
4.1.1 Set Conditions
The fluid conditions were based on the basic water parameters set in SolidWorks. These
were based off of standard temperature and pressure; specifically, a temperature of
Page 40
26
293.2 K, a pressure of 101325 Pa and a resulting density of 1000 kg/m3. These values were
used in the Reynolds number and coefficient of friction equations as needed. The
software allowed the fluid to be laminar or turbulent, dependent on need, with the
turbulence set at the default value (given by SolidWorks) of 1% intensity and a turbulence
length of 0.002999999 m. The vehicles were modeled in 6061-T6 Aluminum Alloy. This
was decided upon for both aesthetics and for the commonality of the material’s use in
submerged vehicles. Additional roughness was not accounted for due to the fact that the
actual roughness will depend on the machining and coating of the vehicle after
production. The roughness would have changed the resulting values to the same degree.
The simulation was run looking only at external flow and excluded internal space (there
was no internal space to analyze, however, for consistency, this option was always
chosen). The mesh resolution was increased to level 4, allowing the minimum number of
iterations per run to be 96. For consistency, the grid size used for simulation was the
software’s default dimensions of -0.9 m to 2.56 m in the X plane, and -1.05 m to 1.05 m in
both the Y and Z planes.
4.1.2 Goals
The goals focused on five main parameters. These parameters were the pressure on the
hull, the change of velocity across the hull, the friction coefficient, the turbulent viscosity
Page 41
27
and the drag force. The pressure, velocity and turbulent viscosity were all measured in the
flow simulation and modeled through the cross section of each hull at 0.1 knot, 0.5 knot,
and 1 knot speeds. The friction coefficient was shown on the 3D model as a surface plot,
and was repeated for each speed. The drag force was found by isolating the x-component
of force on the hull of the vehicle for each speed and capturing the results for the
minimum, maximum and average in Excel. These parameters were all used to examine
the hydrodynamic efficiency of each model dependent on the maximum values; however,
the drag force and resulting drag coefficient were the main determinants. The equations
used for the drag coefficient and Reynolds number are shown below.
Where CD= drag coefficient, FD= drag force, ρ=density, U=velocity, Aw=wetted surface
area, l=length and μ=dynamic viscosity. The constants included a 1000 kg/m3 density, a
0.3 m diameter and a 1.002x10-3 Pa·s dynamic viscosity (using standard temperature and
pressure). The wetted surface areas were calculated in SolidWorks, with a value of 0.95
m2 for those with elliptical hulls and 0.90 m2 for those with parabolic hulls.
For comparison with the CFD calculated friction coefficients, the ITTC-57 formula was
used to estimate the friction resistance coefficient. The formula is as follows:
Page 42
28
Where CF is the friction resistance coefficient, and ReL is the Reynolds number as a
function of length. [20]
The statistical significance of the drag force will be used to determine if the model’s
results indicate a valid difference. A t-test was used to find significance by applying the
following equation to the gathered data.
√
Where t=t value, = mean of the first model, = mean of the second model,
= the standard deviation of the data sets, and n= the degrees of freedom.
The calculation was done using StarStat software, which allowed the calculation of
both a 95% confidence and a 99% confidence level [22].
Page 43
29
5. Results
The results were gathered for each model after a minimum of 96 iterations. The
maximum and minimum values for pressure around the cross section, maximum velocity
around the cross section, maximum surface friction coefficient and maximum and
minimum turbulent viscosity were collected at the speeds of 0.1 knot, 0.5 knot, and 1
knot (0.0514 m/s, 0.2572 m/s and 0.514 m/s, respectively). The speeds were chosen from
the normal range of speeds which the gliders travel; 0.1 knot was the minimum speed, 0.5
knot was an intermediate speed and 1.0 knot was the maximum speed. The maximum,
minimum and average values of drag force were collected for each speed, and the
corresponding drag coefficients were calculated. The Reynolds number for each model at
each speed was also calculated. The values for the maximums and minimums were
collected through the analysis of the simulation after the final run. The pressure, velocity
and turbulent viscosity were gathered by screen shots of the actual flow simulation at
completion, while the friction coefficient was found through a surface plot on the model.
5.1 Pressure
The pressure recorded for models was collected using screen shots of the final run of
simulation for each type. This allowed for the overall minimum and maximum value to be
shown. As seen in Figures 20-23, the greatest pressure is put on the face of the bow,
Page 44
30
which creates lower pressure zones on the curves leading to the cylindrical middle. A
speed of 1 knot was used to show the slight differences in the pressures of each hull.
Figure 20: Pressure on the Parabolic-Parabolic Hull at 1 knot (0.514 m/s)
Figure 21: Pressure on the Parabolic-Cubic Hull at 1 knot (0.514 m/s)
Page 45
31
Figure 22: Pressure on the Elliptical-Parabolic Hull at 1 knot (0.514 m/s)
Figure 23: Pressure on the Elliptical-Cubic Hull at 1 knot (0.514 m/s)
The minimum and maximum values were recorded for each speed, and can be found in
Table 3.
Page 46
32
Table 3: Maximum and Minimum Pressures for all Hull Types at Each Speed
Parabolic-Parabolic Parabolic-Cubic
Elliptical-Parabolic Elliptical-Cubic
Velocity (m/s)
Max (Pa)
Min (Pa)
Max (Pa)
Min (Pa)
Max (Pa)
Min (Pa)
Max (Pa)
Min (Pa)
0.0514 101326 101324 101326 101324 101326 101324 101326 101324
0.2572 101355 101309 101355 101309 101354 101311 101352 101306
0.5140 101446 101261 101446 101262 101439 101267 101432 101249
5.2 Velocity
The maximum velocity was collected across the cross section of the hull. From Figures 24-
27, the velocity can be seen decreasing at the tip of the bow, then increasing along the
curve; steadying on the edges of the cylindrical section, then drastically reducing after the
curve of the tail begins.
Page 47
33
Figure 24: Velocity around the Parabolic-Parabolic Hull at 1 knot (0.514 m/s)
Figure 25: Velocity around the Parabolic-Cubic Hull at 1 knot (0.514 m/s)
Page 48
34
Figure 26: Velocity around the Elliptical-Parabolic Hull at 1 knot (0.514 m/s)
Figure 27: Velocity around the Elliptical-Cubic Hull at 1 knot (0.514 m/s)
The maximum values were recorded for each speed, and can be found in Table 4.
Page 49
35
Table 4: Maximum Velocity around all Hull Types at Each Speed
Parabolic-Parabolic
Parabolic-Cubic
Elliptical-Parabolic
Elliptical-Cubic
Velocity (m/s) Max (m/s) Max (m/s) Max (m/s) Max (m/s)
0.0514 0.059077 0.059105 0.058959 0.058924
0.2572 0.302267 0.302450 0.304049 0.307370
0.5140 0.610355 0.610657 0.610238 0.619895
5.3 Friction Coefficient
The friction coefficient was gathered from surface plots after the simulation had finished
all of its iterations. The plots mainly show the friction at each point along the surface. As
seen in Figures 28-31, the friction is highest at the initial curve of the bow and at the point
of the tail section. All figures are shown at a speed of 1 knot.
Figure 28: Friction Coefficient on the Parabolic-Parabolic Hull at 1 knot (0.514 m/s)
Page 50
36
Figure 29: Friction Coefficient on the Parabolic-Cubic Hull at 1 knot (0.514 m/s)
Figure 30: Friction Coefficient on the Elliptical-Parabolic Hull at 1 knot (0.514 m/s)
Page 51
37
Figure 31: Friction Coefficient on the Elliptical-Cubic Hull at 1 knot (0.514 m/s)
The Friction Coefficient maximums as well as averages were taken. The results can be
seen in Table 5.
Table 5: Average Friction Coefficients on all Hull Types at Each Speed
Parabolic-Parabolic Parabolic-Cubic Elliptical-Parabolic Elliptical-Cubic
Velocity (m/s)
CFD Friction
coefficient ITTC-
57
CFD Friction
coefficient ITTC-
57
CFD Friction
coefficient ITTC-
57
CFD Friction
coefficient ITTC-
57
0.0514 0.0419 0.0102 0.0642 0.0101 0.0383 0.010 0.0838 0.0099
0.2572 0.0185 0.0064 0.0303 0.0063 0.0159 0.0063 0.0469 0.0063
0.5140 0.0189 0.0054 0.0205 0.0054 0.0113 0.0053 0.0329 0.0053
5.4 Turbulent Viscosity
The turbulent viscosity was taken from a screen shot after the simulation finished all
iterations. This shows the turbulence created by each of the hull forms. The geometry
greatly affects the outcome of the turbulence behind the hull. The results are shown in
Page 52
38
Figures 32-35, below, for the 1 knot speed. The maximums and minimums of the
turbulent viscosity for each speed are shown in Table 6.
Figure 32: Turbulent Viscosity along the Parabolic-Parabolic Hull at 1 knot (0.514 m/s)
Figure 33: Turbulent Viscosity along the Parabolic-Cubic Hull at 1 knot (0.514 m/s)
Page 53
39
Figure 34: Turbulent Viscosity along the Elliptical-Parabolic Hull at 1 knot (0.514 m/s)
Figure 35: Turbulent Viscosity along the Elliptical-Cubic Hull at 1 knot (0.514 m/s)
Page 54
40
Table 6: Maximum and Minimum Turbulent Viscosity along all Hull Types at Each Speed
Parabolic-Parabolic Parabolic-Cubic Elliptical-Parabolic Elliptical-Cubic
Velocity (m/s)
Max (Pa·s) Min (Pa·s)
Max (Pa·s) Min (Pa·s)
Max (Pa·s) Min (Pa·s)
Max (Pa·s) Min (Pa·s)
0.0514 0.0224 2.897E-08 0.0400 2.470E-08 0.0264 3.4041E-08 0.0490 4.694E-08
0.2572 0.0629 2.590E-05 0.1760 2.521E-05 0.0837 2.3423E-05 0.1748 3.188E-05
0.514 0.1759 0.0001251 0.3095 0.0001075 0.1254 0.0001067 0.3477 0.0001201
5.5 Drag Force and Drag Coefficient
The drag force values were taken from the global goals in the SolidWorks simulation. The
x-component of force was isolated in order to output the drag force created at each
speed. The drag force compared to the calculated drag coefficients for each vehicle can
be found in Figure 36.
Page 55
41
Figure 36: Drag Force and Drag Coefficients for each Hull Type
Below, in Table 7, the average drag force and resulting drag coefficient are shown. The
minimum, maximum and averages for each speed can be seen in the Appendix.
Table 7: Drag Force and Drag Coefficient Averages for each Hull Type
FD (N) CD
Parabolic-Parabolic 0.598246 0.013481
Parabolic-Cubic 0.717047 0.015816
Elliptical-Parabolic 0.545189 0.011764
Elliptical-Cubic 0.546429 0.010646
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Drag C
oe
fficien
t Dra
g Fo
rce
(N)
FD
CD
Page 56
42
The resulting calculation of the drag coefficient shows how much that drag force effects
the movement of the hull. In order to decide if the drag coefficient is a significant value,
the differences between each model’s drag force must be shown to be significant. A t-test
was used to find statistical significance at both a 95% confidence level and a 99%
confidence level. As seen below, in Table 8, there was a statistical significance between all
hull types except between the Elliptical-Cubic and Elliptical Parabolic.
Table 8: Statistical Significance of Drag Force between each of the Hull Types
Avg. Fd
(N) Delta Iterations T-score Significant
at 95% Significant
at 99%
Elliptical-Cubic 0.546430 0.007216 288 0.131972 No No
Elliptical-Parabolic 0.545189 0.006025 Elliptical-Cubic 0.546430 0.007216 288 23.256570 Yes Yes
Parabolic-Cubic 0.717048 0.001322 Elliptical-Cubic 0.546430 0.007216 288 6.520815 Yes Yes
Parabolic-Parabolic 0.598247 0.003327 Parabolic-Cubic 0.717048 0.001322 288 27.861070 Yes Yes
Elliptical-Parabolic 0.545189 0.006025 Parabolic-Parabolic 0.598247 0.003327 288 7.708741 Yes Yes
Elliptical-Parabolic 0.545189 0.006025 Parabolic-Cubic 0.717048 0.001322 288 33.180470 Yes Yes
Parabolic-Parabolic 0.598247 0.003327
Page 57
43
5.6 Reynolds Numbers
The Reynolds Number for each hull was calculated for the 0.1 knot, 0.5 knot, and 1 knot
speeds (0.0514 m/s, 0.2572 m/s, and 0.514 m/s respectively). The results of the
calculations are shown in Figure 37. The lowest Reynolds Numbers belonged to the
Parabolic-Parabolic Hull at 51297, 256687, and 512974 for the 0.1 knot, 0.5 knot and 1
knot speeds, while the highest numbers belonged to the Elliptical-Cubic hull with values
of 56068, 280558, and 560681 at the same speeds.
Figure 37: Reynolds Number for each hull type at each speed
0.00
100000.00
200000.00
300000.00
400000.00
500000.00
600000.00
Ellip-Cub Ellip-Para Para-Cub Para-Para
Reynolds Number
0.0514 m/s
0.2572 m/s
0.514 m/s
Page 58
44
6. Discussion
After collecting the results for each parameter, the question of which hull type is the most
hydrodynamically efficient must be answered. The results were analyzed by parameter:
pressure on the hull, velocity along the hull, the friction coefficient caused by the hull, the
turbulent viscosity along the hull, the drag force created by the hull and the
corresponding drag coefficients and Reynolds Numbers. Although each parameter has its
pros and cons for hydrodynamic analysis, the overall decision relies on the drag created
by the hull, and therefore, the drag coefficient and friction coefficient. Although the drag
coefficient includes the friction coefficient, both factors were considered since the drag
coefficient was calculated by hand and the friction coefficient was calculated through the
CFD software.
6.1 Pressure
The pressure is an indicator of increased drag at the points at which the pressure is the
greatest. This can be seen in the drag coefficient results as well, where the pressure
creates a skin friction along the vehicle. Because this study looked at very slow speeds,
the pressure values were very similar and did not show much deviation between the hull
types. However, the values did show a slightly higher pressure on the parabolic bows over
Page 59
45
the elliptical bows. This is logical and expected because the nose of the parabolic bow is
more flattened than that of the elliptical bow. Unfortunately, this was not enough of a
difference to say that the elliptical bows are definitely more hydrodynamic.
6.2 Velocity
The results showed that the Elliptical bow and Cubic tail combination resulted in the
highest maximum velocity around the hull. For this study, the effect on the wings was not
analyzed, however there is a potential for the velocity around the hull to affect the lift on
the wings. The results of the velocity values show how the geometry streamlines through
the water. The better streamlining, the easier it is for the vehicle to move through the
water. Each of the hull types showed the same pattern of increasing in velocity over the
curvature of the bow, and curve of the tail section as well as a decrease in velocity on the
tip of the bow and end of the tail. As previously stated, Myring believed that those bodies
who produce larger velocities tend to produce higher percentages in form drag. The
Parabolic Hulls seemed to have the lowest velocity maximums around the edges, and
therefore may contribute to drag least [13]. However, the similarity of streamlining
throughout each of the hulls, along with the fact that there is no way to pinpoint the
maximum velocity, nor is there a large difference in velocities for each hull, means that
there is no visible benefit of any hull over the others for this parameter.
Page 60
46
6.3 Friction Coefficient
In this study, the results were based on the average friction coefficients that were found
along the hull for each speed. This represents the boundary layer friction that occurs
along the body. The results show that the Elliptical Bow paired with the Parabolic Tail had
the lowest friction coefficient at each speed, and therefore, the lowest average friction
coefficient. The second lowest values were results of the Parabolic-Parabolic Hull. This
suggests that the Parabolic Tail had the most effect on the friction coefficients. The ITTC-
57 values that were calculated were not comparable to the CFD values. Most likely, this is
due to the fact that the ITTC-57 formula is used mainly for scaled ship models that are
around 2 m in length. The models in this study do not exceed 1.09 m and have fairly low
Reynolds Numbers. The one result that can be considered is the consistency in decreasing
friction coefficient with speed.
6.4 Turbulent Viscosity
The turbulent viscosity shows the overall effect of the geometry of the hull types and
their streamlining. This study took the turbulent viscosity into account in order to see if
the geometry of the bow created any turbulence down the rest of the hull which could
increase the drag on the hull. From the results it can be seen that the Parabolic-Parabolic
Hull had the lowest maximum turbulent viscosities. The differences between the hulls for
Page 61
47
the minimum values were very small. Overall, the values were too small to provide any
accurate conclusions. Given the precision of the output of the software, it was hard to
determine if there were any changes in turbulence along the cylindrical middle section
which would have affected the drag. It was observed that the wakes created by the
different hulls were very different depending on the tail section and the Parabolic Tails
were seen to create the lowest maximums in turbulent viscosity. This will have an effect
on any additions to the tail sections during future work.
6.5 Drag Force, Drag Coefficient and Reynolds Number
The drag force on the hull was analyzed as the x-component of force along the hull. The
drag coefficient shows the amount that the drag force affects the overall movement of
the hull. The drag coefficient also includes the pressure/form drag. The higher the drag
coefficient, the more effect drag force has over other forces upon movement. As seen in
the results, there was a statistical significance between all hull types except between the
Elliptical-Cubic and Elliptical-Parabolic. This means that the drag force on each hull was
significantly different than the others, with the exception of the Elliptical-Cubic and
Elliptical-Parabolic pair. Interestingly, the lowest drag coefficient of 0.0106 belonged to
the Elliptical-Cubic Hull. This was not expected given that the friction coefficient was the
greatest for the Elliptical-Cubic Hull. The second lowest drag coefficient belonged to the
Page 62
48
Elliptical-Parabolic Hull, with a value of 0.0118. From this data, the assumption may be
made that the Elliptical Bow has the most influence over the drag coefficient. The
resulting values of the drag coefficient were logically higher than that of a turbulent flat
plate (0.005), but lower than that of a streamlined body (around 0.04). The difference is
most likely due to the fact that this is a fairly small scale study. Going back to the study by
Stevenson et. al, the results for the Laminar Flow Body showed drag coefficients of 0.0109
and 0.013-0.015 for CFD and experimental outcomes respectively, and the NACA airfoils
with similar length to diameter ratios had values of 0.0195-0.025. Given that the AUVs
are moving at over twice the speed and are over twice as large as the gliders in this study,
the values are still very close, and nonetheless shows the importance of the drag on the
hull upon the overall movement of the vehicle.
The Reynolds Number analysis showed that the Parabolic Bow created the lowest values,
with the Parabolic-Parabolic Hull leading the way. This was the result of the difference in
lengths of each hull. Since the volume was kept the same, the length to diameter ratio
became the deciding factor in the resulting Reynolds Number. Therefore, the Elliptical
Bows created higher values.
Page 63
49
7. Conclusions
The use of SolidWorks Flow Simulation was found to be an effective tool for CFD.
Although it lacks an easy way to incorporate goal equations successfully, simple flow
models could be built with logical parameter outcomes. All of the results gathered were
mathematically logical, matched up to other theoretical standards, and followed the
expected pattern. This would be a good tool for learning about flow, or to get an initial
idea of the flow parameters of a new component, part, or system.
From the results of this study, there was no obvious winner. The friction coefficient
analysis suggests that the Elliptical-Parabolic Hull is the optimum choice with values of
0.0383-0.0113 (at 0.0514 m/s – 0.514 m/s respectively), while the drag coefficient
suggests that the Elliptical-Cubic Hull is the best with an average value of 0.0106. The
values were close to those from other studies; the CFD analysis of the Laminar Flow Body
produced drag coefficients of 0.0109, and the NACA airfoils had values ranging from
0.0195-0.025. The Reynolds Number leans towards the Parabolic-Parabolic Hull as the
best choice (minimum value of 51297), however, the values are very close to each other
and therefore, not valid for comparison. Overall, the Elliptical-Parabolic Hull was either
the best or the second best in each viable analysis, but the results were too close in each
parameter in order to definitively determine which vehicle was the most
Page 64
50
hydrodynamically efficient. Future work must be done in order to validate the results and
to find the optimal hull design for hydrodynamic efficiency.
Page 65
51
8. Future Work
This study had a very limited time frame for completion. Thus, there were additions that
were not able to be included. First, the best hull or hulls need to be identified. Evaluating
a change of the length to increase the length to diameter ratio above 4 (lengths of 1.5 m,
1.8m, 2.0 m, etc.), may show a difference in the results that are unique and valid. This
change of dimension could result in changes in the effect of the turbulent viscosity along
the length of the middle section, or the velocity occurring around the hull due to the
geometry. The design of the models in this study could also be compared to some of the
NACA airfoils at the same volumes. To check for validity of SolidWorks as a CFD program
and possibly expose any issues with the gathered values, the models could be input into
different CFD analysis software. Although it may be more time consuming, FLUENT
provides more options for inserting customized fluid equations, therefore increasing the
amount of useful data versus useless output. Once the most hydrodynamically efficient
hulls are chosen, they then can be put through an experimental test.
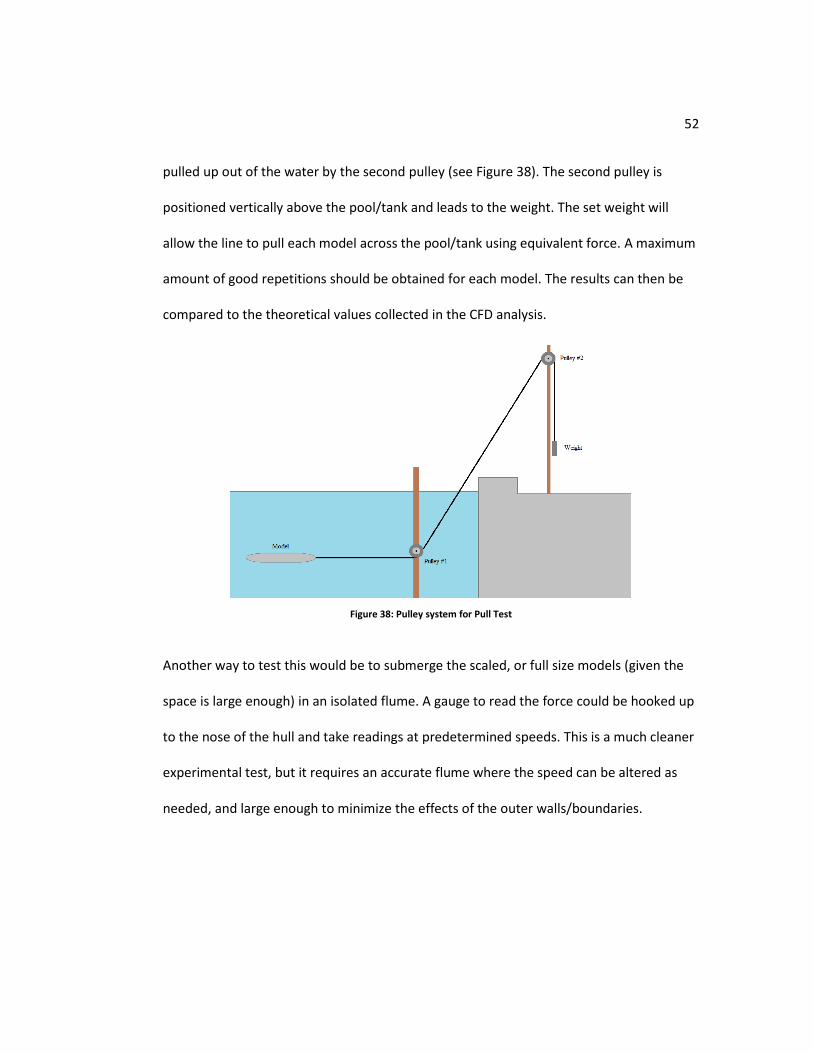
A good experimental test would be to build the models out of high density foam in a CNC
machine, at a 1/3 to 1/2 scale. The models can then be put through a pulley test in either
a pool or a wave tank. The pull test includes harnessing each model to a fishing line that is
attached to a set of pulleys. One of the pulleys is located in the water at an appropriate
depth such that the entire model will be submerged, and so that the model will not be
Page 66
52
pulled up out of the water by the second pulley (see Figure 38). The second pulley is
positioned vertically above the pool/tank and leads to the weight. The set weight will
allow the line to pull each model across the pool/tank using equivalent force. A maximum
amount of good repetitions should be obtained for each model. The results can then be
compared to the theoretical values collected in the CFD analysis.
Figure 38: Pulley system for Pull Test
Another way to test this would be to submerge the scaled, or full size models (given the
space is large enough) in an isolated flume. A gauge to read the force could be hooked up
to the nose of the hull and take readings at predetermined speeds. This is a much cleaner
experimental test, but it requires an accurate flume where the speed can be altered as
needed, and large enough to minimize the effects of the outer walls/boundaries.
Page 67
53
9. References
[1] Applied Physics Laboratory (APL). Seaglider: Summary. n.d.
http://www.apl.washington.edu/projects/seaglider/summary.html
[2] Arima, M., N. Ichihashi and Y. Miwa. 2009. Modelling and Motion Simulation of an Underwater
Glider with Independently Controllable Main Wings. IEEE: OCEANS 2009: Europe. Pp. 1-6.
[3] AUVAC. Slocum Electric Glider Configuration. October 2012.
http://auvac.org/configurations/view/49.
[4] Bluefin Robotics. Spray Glider Product Sheet. 2011.
http://www.bluefinrobotics.com/assets/Downloads/Bluefin-Spray-Glider-Product-
Sheet.pdf
[5] Chui, F., M. Guo, J. Guo, and S. Lee. 2008. Modular modeling of maneuvering motions of an
underwater glider. IEEE: OCEANS 2008. Pp. 1-8.
[6] Davis, R. E., C. C. Eriksen, and C. P. Jones. 2002. Chapter 3: Autonomous buoyancy-driven
underwater gliders. Technology and Applications of Autonomous Underwater Vehicles.
Taylor and Francis, London. Pp. 37-58.
[7] Graver, J.G. 2005. Underwater Gliders: Dynamics, Control and Design. Dissertation, Princeton
University, Department of Mechanical and Aerospace Engineering, May, 2005
[8] Hemmelgarn, R. 2008. Thesis: Development of a Long-Range Gliding Unmanned Underwater
Vehicle Utilizing Java Sun Spot Technology. Naval Post Graduate School: Monterey, CA.
[9] Inoue, T., H. Suzuki, R. Kitamoto, Y. Watanabe and H. Yoshida. 2010. Hull Form Design of
Underwater Vehicle Applying CFD (Computational Fluid Dynamics). OCEANS 2010 IEEE –
Sydney. Pp 1-5.
[10] Isa, K. and M.Arshad. 2011. Dynamic Modeling and Characteristics Estimation for USM
Underwater Glider. IEEE Control and System Graduate Research Colloquium. Pp. 12-17.
Page 68
54
[11] Jones, A., Ph.D. Candidate in Ocean Engineering. Personal Interview. September 10, 2012.
[12] Kawaguchi, K., T. Ura, Y. Tomoda, Y. Kobayashi. 1993. Development and Sea Trials of a Shuttle
Type AUV "ALBAC". Proc. 8th. Intn. Symp. on Unmanned Untethered Submersible
Techonology. Durham, Sep. 1993. Pp.7-13.
[13] Myring, D.F. 1976. A Theoretical Study of Body Drag in Subcritical Axisymmetric Flow.
Aeronautical Quarterly. Pp. 186-194.
[14] National Marine Facilities: USL. Autosub. October 2012.
http://www.noc.soton.ac.uk/nmf/usl_index.php?page=as
[15] NURC. Autonomous Underwater Vehicles. October 2012.
http://www.uncw.edu/nurc/AUV/glider/about.htm
[16] Osse, T. and C. Erikson. 2007. The Deepglider: A Full Ocean Depth Glider for Oceanographic
Research. IEEE: OCEANS 2007. Pp. 1-12.
[17] Phillips, A., M. Furlong, and S.R. Turnock. 2007. The Use of Computational Fluid Dynamics to
Assess the Hull Resistance of Concept Autonomous Underwater Vehicles. IEEE: OCEANS
2007: Europe. Pp. 1-6.
[18] Sagala F. and R. Bambang. 2011. Development of Sea Glider Autonomous Underwater Vehicle
Platform for Marine Exploration and Monitering. Indian Journal of Geo Marine Sciences:
Vol. 40, N. 2. Pp. 287-295.
[19] Sherman, J., Davis, R. E., Owens, W. B., and Valdes, J. (2001). “The autonomous
underwaterglider Spray,” IEEE J. Oceanic Engineering., Volume 26, Issue 4, Oct. 2001, pp.
437-446.
[20] Shultz, M.P., J.A. Finlay, M.E. Callow and J.A. Callow. 2003. Three Models to Relate
Detachment of Fouling at Laboratory and Ship Scale. Biofouling: Vol. 19. Pp 17-26.
Page 69
55
[21] Stevenson P., M. Furlong, and D. Dormer. 2007. AUV shapes - Combining the Practical and
Hydrodynamic Considerations. OCEANS 2007 – Europe. Pp. 1-6.
[22] StarStat: Significance Testing Calculator. DataStar, Inc. 10 November 2012.
http://www.surveystar.com/our_services/ttest.htm
[23] Teledyne-Webb. G2 Slocum Glider Datasheet. 2010.
http://www.webbresearch.com/pdf/Slocum_Glider_Data_Sheet.pdf
[24] Triantafyllou, M. S., and F. Hover. 2002. Maneuvering and Control of Marine Vehicles.
Department of Ocean Engineering Massachusetts Institute of Technology: Cambridge,
Massachusetts USA. Pp. 62.
[25] Wang Y., Y. Wang and Z. He. 2011. Bouyancy compensation analysis of an autonomous
underwater glider. IEEE: 2011 International Conference on Electronic & Mechanical
Engineering and Information Technology. Pp. 824-827.
[26] Webb, D. C., P.J. Simonetti, C.P. Jones. 2001. SLOCUM: an underwater glider propelled by
environmental energy. IEEE J. Oceanic Engineering. Volume 26, Issue 4, Oct. 2001. Pp. 447
– 452.
[27] Wolk, F., R.G. Lueck, and L.St. Laurent. 2009. Turbulence Measurements from a Glider.
OCEANS 2009, MTS/IEEE Biloxi - Marine Technology for Our Future: Global and Local
Challenges. Pp 1-6.
.
Page 70
56
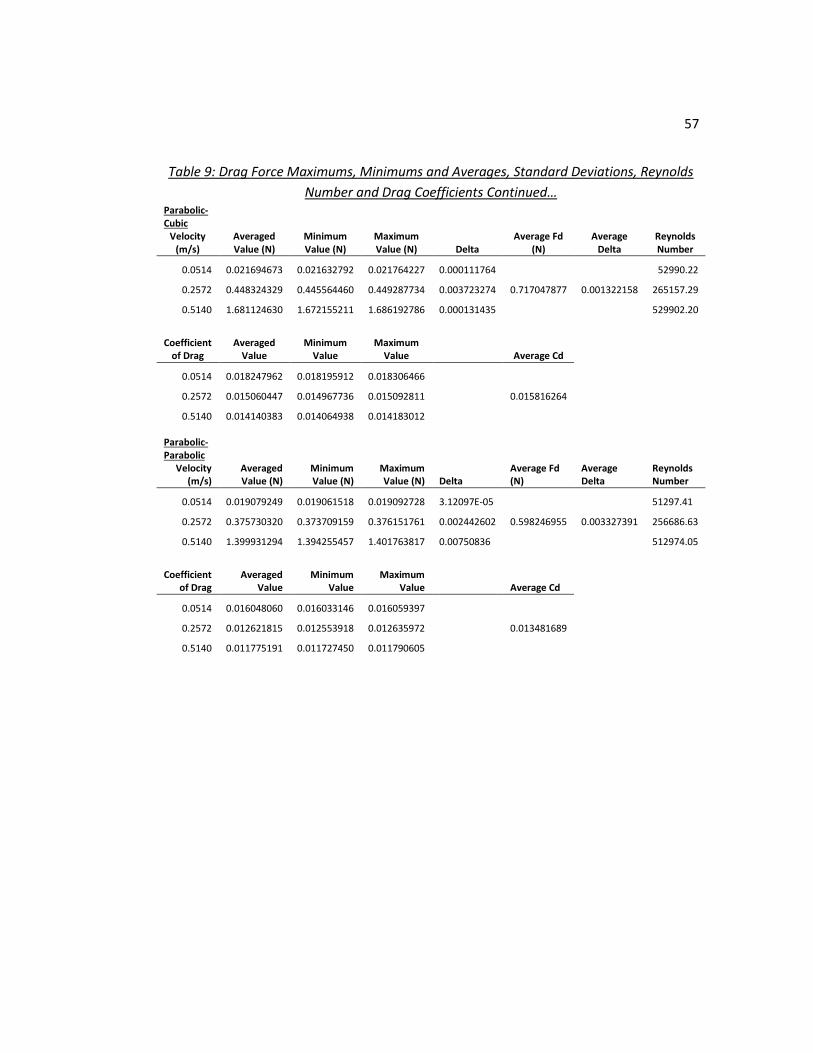
10. Appendix
Table 9: Drag Force Maximums, Minimums and Averages, Standard Deviations, Reynolds Number
and Drag Coefficients
Elliptical-Cubic
Velocity (m/s)
Averaged Value (N)
Minimum Value (N)
Maximum Value (N) Delta
Average Fd (N)
Average Delta
Reynolds Number
0.0514 0.013923440 0.013786289 0.013961471 0.000175182 56068.06
0.2572 0.330885410 0.328018828 0.332398890 0.004380061 0.546429970 0.007216211 280558.48
0.5140 1.294481060 1.284092749 1.301186140 0.017093391 560680.64
Coefficient
of Drag Averaged
Value Minimum
Value Maximum
Value
Average Cd
0.0514 0.011094985 0.010985695 0.011125290
0.2572 0.010530332 0.010439104 0.010578498 0.010646825
0.5140 0.010315157 0.010232377 0.010368587
Elliptical-Parabolic
Velocity (m/s)
Averaged Value (N)
Minimum Value (N)
Maximum Value (N) Delta
Average Fd (N)
Average Delta
Reynolds Number
0.0514 0.017788016 0.017719529 0.017854422 0.000134893 54375.25
0.2572 0.344856297 0.342667304 0.346176173 0.003508869 0.545189333 0.006025057 272087.82
0.5140 1.272923686 1.264324173 1.280799139 0.014431410 543752.50
Coefficient
of Drag Averaged
Value Minimum
Value Maximum
Value
Average Cd
0.0514 0.014174497 0.014119923 0.014227413
0.2572 0.010974952 0.010905288 0.011016956 0.011764275
0.5140 0.010143376 0.010074850 0.010206132
Page 71
57
Table 9: Drag Force Maximums, Minimums and Averages, Standard Deviations, Reynolds
Number and Drag Coefficients Continued… Parabolic-Cubic
Velocity (m/s)
Averaged Value (N)
Minimum Value (N)
Maximum Value (N) Delta
Average Fd (N)
Average Delta
Reynolds Number
0.0514 0.021694673 0.021632792 0.021764227 0.000111764 52990.22
0.2572 0.448324329 0.445564460 0.449287734 0.003723274 0.717047877 0.001322158 265157.29
0.5140 1.681124630 1.672155211 1.686192786 0.000131435 529902.20
Coefficient
of Drag Averaged
Value Minimum
Value Maximum
Value
Average Cd
0.0514 0.018247962 0.018195912 0.018306466
0.2572 0.015060447 0.014967736 0.015092811 0.015816264
0.5140 0.014140383 0.014064938 0.014183012
Parabolic-Parabolic
Velocity (m/s)
Averaged Value (N)
Minimum Value (N)
Maximum Value (N) Delta
Average Fd (N)
Average Delta
Reynolds Number
0.0514 0.019079249 0.019061518 0.019092728 3.12097E-05 51297.41
0.2572 0.375730320 0.373709159 0.376151761 0.002442602 0.598246955 0.003327391 256686.63
0.5140 1.399931294 1.394255457 1.401763817 0.00750836 512974.05
Coefficient
of Drag Averaged
Value Minimum
Value Maximum
Value
Average Cd
0.0514 0.016048060 0.016033146 0.016059397
0.2572 0.012621815 0.012553918 0.012635972 0.013481689
0.5140 0.011775191 0.011727450 0.011790605