A Novel Tuning Algorithm for Fractional Order
IMC Controllers for Time Delay Processes
Cristina I. Muresan, Eva H. Dulf, and Roxana Both Department of Automation, Technical University of Cluj-Napoca, Cluj-Napoca, Romania
Email: [email protected]
Abstract—This paper presents a novel tuning algorithm for
fractional order IMC controllers for time delay processes.
The tuning algorithm is based on computing the equivalent
controller of the IMC structure and imposing frequency
domain specifications for the resulting open loop system. A
second order time delay process is used as a case study. An
integer order IMC controller is designed, as well as a
fractional order IMC controller. The simulation results
show that the proposed fractional order IMC controller
ensures an increased robustness to modeling uncertainties.
Index Terms—fractional order controller, time delay
processes, tuning algorithm, robustness
I. INTRODUCTION
Fractional calculus represents the generalization of the
integration and differentiation to an arbitrary order. There
is currently a continuously increasing interest in
generalizing classical control theories and developing
novel control strategies that use fractional calculus. The
most commonly used method for controlling a great
range of processes is the PID controller, which is in fact a
special case of fractional order PIμDλs. The design
problem of fractional order controllers has been the
interest of many authors, with some valuable works, in
which the fractional order controllers have been applied
to a variety of processes to enhance the robustness and
performance of the control systems [1]-[4]. The choice of
fractional order PIμDλ controllers is based on their
potential to improve the control performance, due to the
supplementary tuning variables involved, μ and λ. Since
the fractional controller has more parameters than the
conventional controller, more specifications can be
fulfilled, improving the overall performance of the
system and making it more robust to modeling
uncertainties. Apart from the fractional order PIμDλ
controller, some extensions and generalizations of
advanced control strategies using fractional calculus have
been previously proposed, such as fractional optimal
control [5], fractional fuzzy adaptive control [6],
fractional iterative learning control [7], fractional
predictive control [8] and fractional model reference
adaptive control [9] to name just a few.
The internal model control (IMC) based PID controller
has gained widespread acceptance in the control
Manuscript received July 1, 2014; revised June 8, 2015.
community, mainly because of the simplicity in the
design that is based upon inverting the process model.
The IMC approach has been proposed as a method for
tuning fractional order PIμD
λ based on a bandwidth
specification [10], for first order plus time delay process
[11] and a class of fractional order systems [12-14]. In
this paper, a novel tuning algorithm is proposed for a
fractional order IMC (FO-IMC) controller, as compared
to the existing design approaches [10-14]. An integer
order IMC controller is first tuned to meet settling time
requirements. Next, the FO-IMC controller is tuned
according to the same performance specification.
However, due to the supplementary tuning parameter, the
fractional order of the FO-IMC filter, a second
performance criterion is imposed to increase the closed
loop performance and the robustness of the controller.
The simulation results, considering modeling errors,
show that the proposed FO-IMC controller offers better
closed loop results as compared to its integer order
version.
II. TUNING ALGORITHM
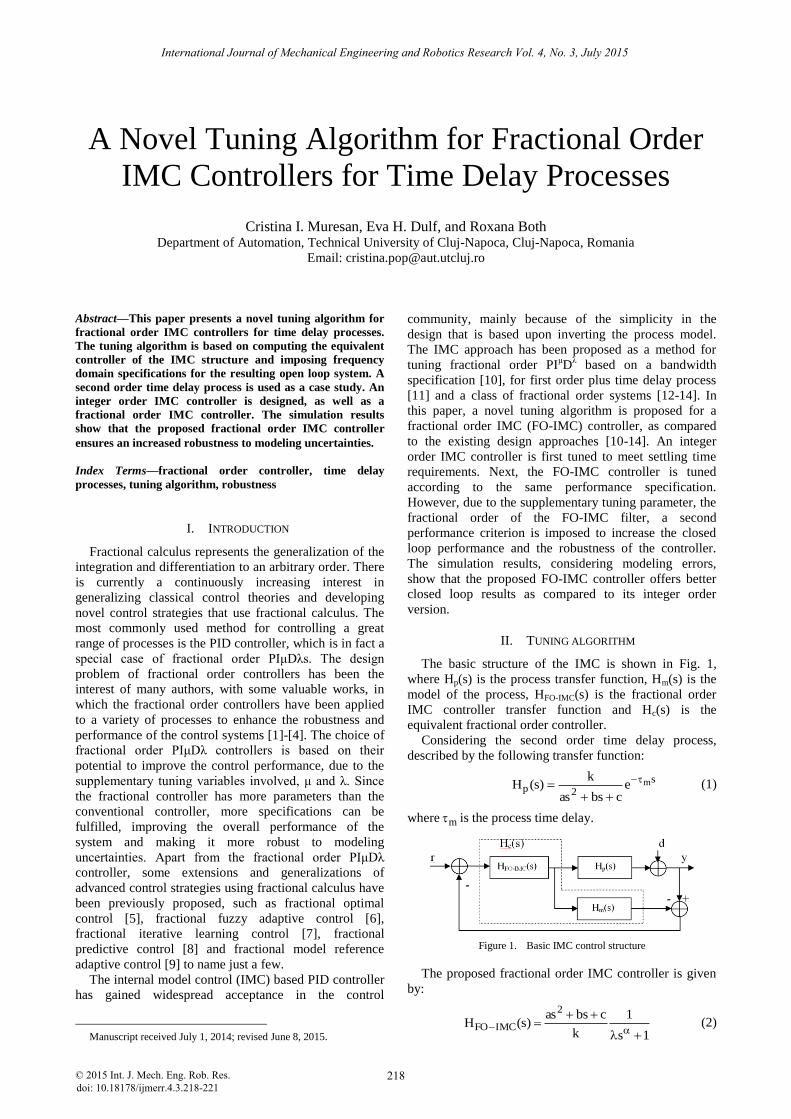
The basic structure of the IMC is shown in Fig. 1,
where Hp(s) is the process transfer function, Hm(s) is the
model of the process, HFO-IMC(s) is the fractional order
IMC controller transfer function and Hc(s) is the
equivalent fractional order controller.
Considering the second order time delay process,
described by the following transfer function:
s
2pme
cbsas
k)s(H
(1)
where m is the process time delay.
Figure 1. Basic IMC control structure
The proposed fractional order IMC controller is given
by:
1s
1
k
cbsas)s(H
2
IMCFO
(2)
218© 2015 Int. J. Mech. Eng. Rob. Res.
International Journal of Mechanical Engineering and Robotics Research Vol. 4, No. 3, July 2015
doi: 10.18178/ijmerr.4.3.218-221
with αϵ(0÷1), the fractional order. The equivalent
controller in Fig. 1 is computed as:
ssk
cbsas
)s(H)s(H1
)s(H)s(H
m
2
mIMCFO
IMCFOc
(3)
where a series approximation for the time delay was used,
with s1e msm
.
The open loop transfer function with the equivalent
controller and the process transfer function is described
by:
s
m
pcolme
ss
1)s(H)s(H)s(H
(4)
To tune the FO-IMC controller, a new tuning
technique is proposed, that allows the computation of the
time constant λ and the fractional order α based on two
imposed performance specifications, a specified gain
crossover frequency, ωgc, and a phase margin, γ. The
specified ωgc is given in order to ensure a certain closed
loop settling time, while an increased phase margin will
ensure increased stability of the closed loop system. The
phase margin condition is written in a mathematical form
as:
)j(H gcol (5)
which leads to:
2costan
2sin gcm
1gcm
(6)
where the following relation was used
2sinj
2cosj gcgc . The gain
crossover frequency condition is written in a
mathematical form as:
1)j(H gcol (7)
which leads to:
12
sin2 1gcm
2gc
2m
2gc
2
(8)
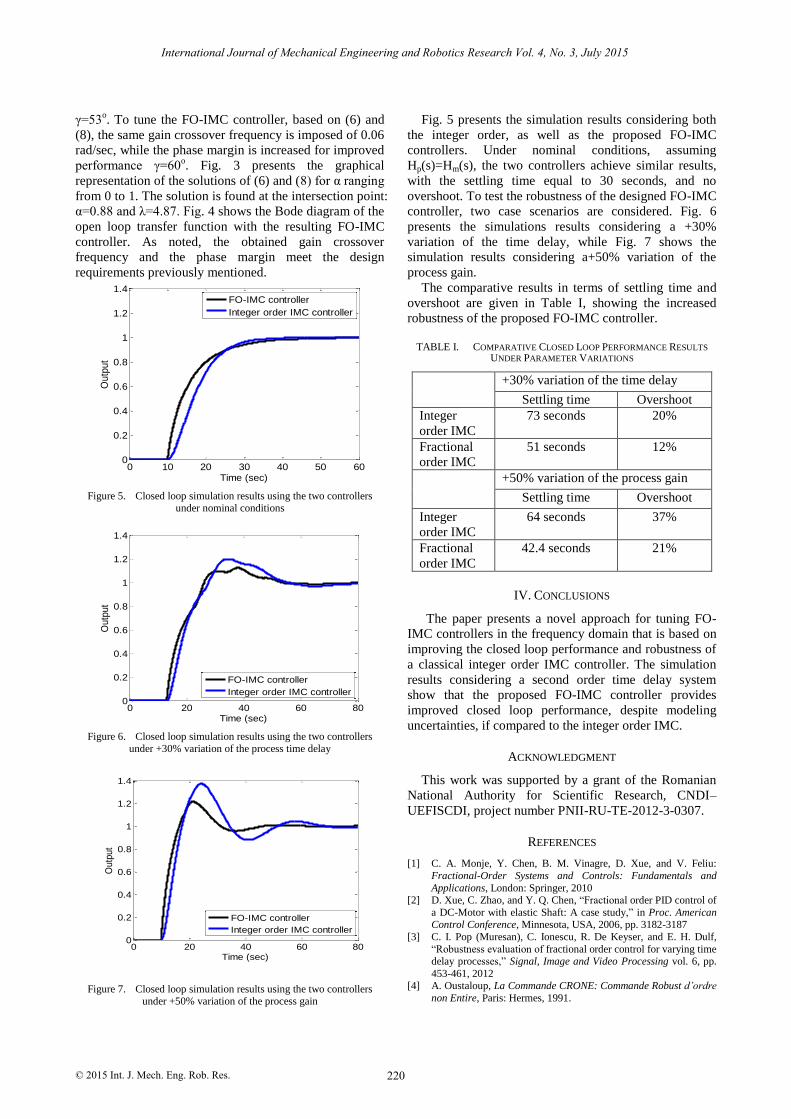
To compute the values for λ and α, a graphical
approach is used in which for different values of α,
relations (6) and (8) are used to compute λ and the
resulting values are plotted as a function of α. The
intersection point yields the final values for the fractional
order and the time constant.
III. CASE STUDY: SECOND ORDER TIME DELAY PROCESS
To exemplify the tuning procedure described in the
previous section, the following second order process is
used as a case study:
s10
2p e10s2s
5)s(H
(9)
For comparison purposes, an integer order IMC
controller is designed:
2
2
IMC1s2.3
1
5
10s2s)s(H
(10)
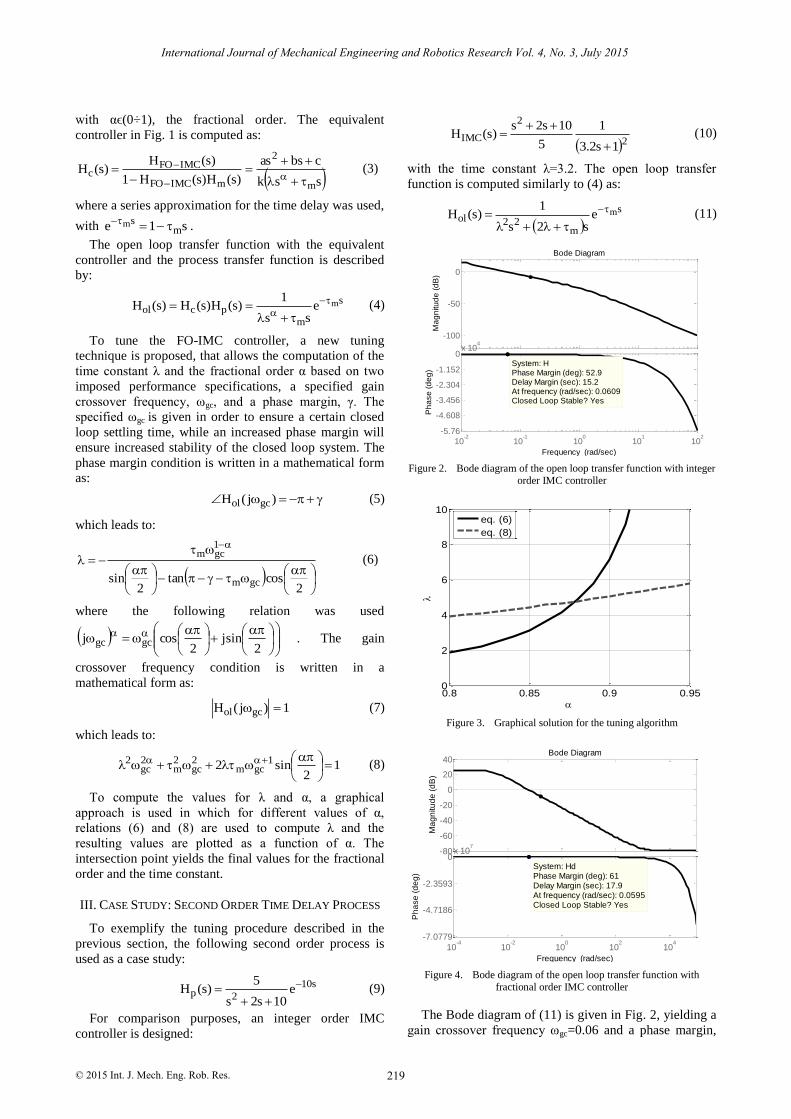
with the time constant λ=3.2. The open loop transfer
function is computed similarly to (4) as:
s
m22ol
mes2s
1)s(H
(11)
-100
-50
0
Ma
gn
itu
de
(d
B)
Bode Diagram
Frequency (rad/sec)
10-2
10-1
100
101
102
-5.76
-4.608
-3.456
-2.304
-1.152
0x 10
4
System: HPhase Margin (deg): 52.9Delay Margin (sec): 15.2At frequency (rad/sec): 0.0609Closed Loop Stable? Yes
Ph
ase
(d
eg
)
Figure 2. Bode diagram of the open loop transfer function with integer
order IMC controller
0.8 0.85 0.9 0.950
2
4
6
8
10
eq. (6)
eq. (8)
Figure 3. Graphical solution for the tuning algorithm
-80
-60
-40
-20
0
20
40
Ma
gn
itu
de
(d
B)
Bode Diagram
Frequency (rad/sec)
10-4
10-2
100
102
104
-7.0779
-4.7186
-2.3593
0x 10
7
System: HdPhase Margin (deg): 61Delay Margin (sec): 17.9At frequency (rad/sec): 0.0595Closed Loop Stable? Yes
Ph
ase
(d
eg
)
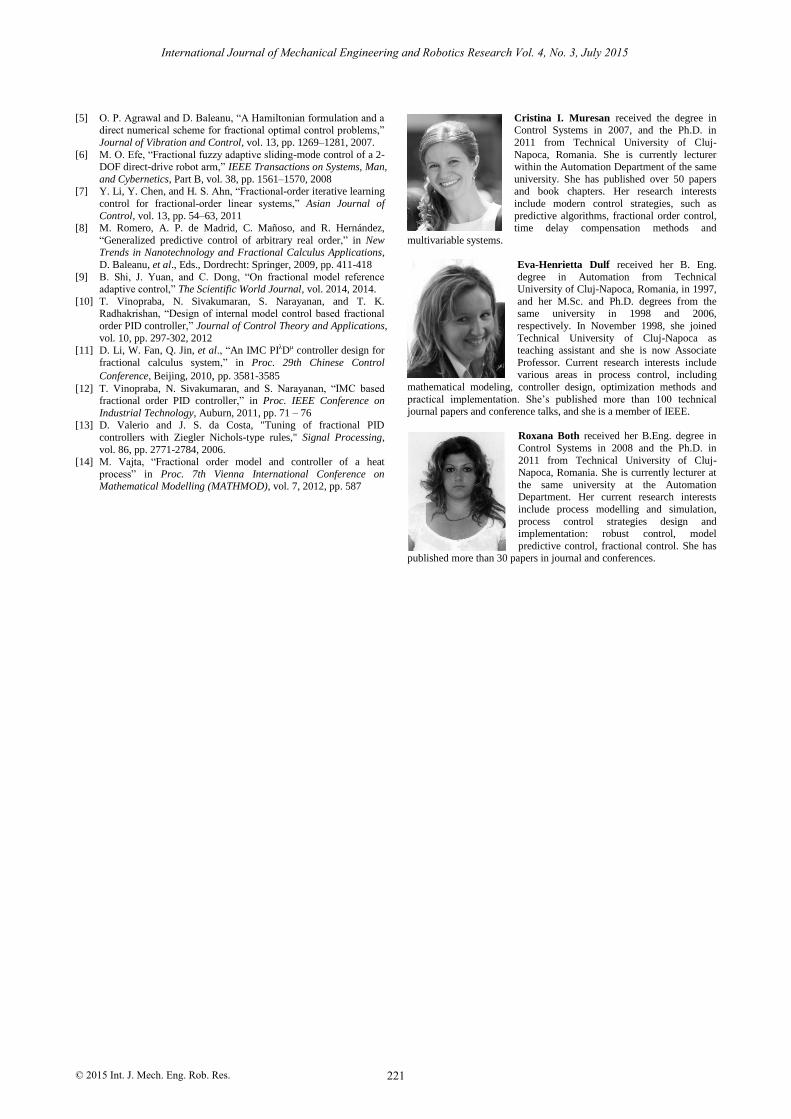
Figure 4. Bode diagram of the open loop transfer function with
fractional order IMC controller
The Bode diagram of (11) is given in Fig. 2, yielding a
gain crossover frequency ωgc=0.06 and a phase margin,
219© 2015 Int. J. Mech. Eng. Rob. Res.
International Journal of Mechanical Engineering and Robotics Research Vol. 4, No. 3, July 2015
γ=53o. To tune the FO-IMC controller, based on (6) and
(8), the same gain crossover frequency is imposed of 0.06
rad/sec, while the phase margin is increased for improved
performance γ=60o. Fig. 3 presents the graphical
representation of the solutions of (6) and (8) for α ranging
from 0 to 1. The solution is found at the intersection point:
α=0.88 and λ=4.87. Fig. 4 shows the Bode diagram of the
open loop transfer function with the resulting FO-IMC
controller. As noted, the obtained gain crossover
frequency and the phase margin meet the design
requirements previously mentioned.
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec)
Outp
ut
FO-IMC controller
Integer order IMC controller
Figure 5. Closed loop simulation results using the two controllers under nominal conditions
0 20 40 60 800
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec)
Outp
ut
FO-IMC controller
Integer order IMC controller
Figure 6. Closed loop simulation results using the two controllers under +30% variation of the process time delay
0 20 40 60 800
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec)
Outp
ut
FO-IMC controller
Integer order IMC controller
Figure 7. Closed loop simulation results using the two controllers under +50% variation of the process gain
Fig. 5 presents the simulation results considering both
the integer order, as well as the proposed FO-IMC
controllers. Under nominal conditions, assuming
Hp(s)=Hm(s), the two controllers achieve similar results,
with the settling time equal to 30 seconds, and no
overshoot. To test the robustness of the designed FO-IMC
controller, two case scenarios are considered. Fig. 6
presents the simulations results considering a +30%
variation of the time delay, while Fig. 7 shows the
simulation results considering a+50% variation of the
process gain.
The comparative results in terms of settling time and
overshoot are given in Table I, showing the increased
robustness of the proposed FO-IMC controller.
TABLE I. COMPARATIVE CLOSED LOOP PERFORMANCE RESULTS
UNDER PARAMETER VARIATIONS
+30% variation of the time delay
Settling time Overshoot
Integer
order IMC
73 seconds 20%
Fractional
order IMC
51 seconds 12%
+50% variation of the process gain
Settling time Overshoot
Integer
order IMC
64 seconds 37%
Fractional
order IMC
42.4 seconds 21%
IV. CONCLUSIONS
The paper presents a novel approach for tuning FO-
IMC controllers in the frequency domain that is based on
improving the closed loop performance and robustness of
a classical integer order IMC controller. The simulation
results considering a second order time delay system
show that the proposed FO-IMC controller provides
improved closed loop performance, despite modeling
uncertainties, if compared to the integer order IMC.
ACKNOWLEDGMENT
This work was supported by a grant of the Romanian
National Authority for Scientific Research, CNDI–
UEFISCDI, project number PNII-RU-TE-2012-3-0307.
REFERENCES
[1] C. A. Monje, Y. Chen, B. M. Vinagre, D. Xue, and V. Feliu:
Fractional-Order Systems and Controls: Fundamentals and
Applications, London: Springer, 2010 [2] D. Xue, C. Zhao, and Y. Q. Chen, “Fractional order PID control of
a DC-Motor with elastic Shaft: A case study,” in Proc. American Control Conference, Minnesota, USA, 2006, pp. 3182-3187
[3] C. I. Pop (Muresan), C. Ionescu, R. De Keyser, and E. H. Dulf,
“Robustness evaluation of fractional order control for varying time delay processes,” Signal, Image and Video Processing vol. 6, pp.
453-461, 2012
[4] A. Oustaloup, La Commande CRONE: Commande Robust d’ordre
non Entire, Paris: Hermes, 1991.
220© 2015 Int. J. Mech. Eng. Rob. Res.
International Journal of Mechanical Engineering and Robotics Research Vol. 4, No. 3, July 2015
[5] O. P. Agrawal and D. Baleanu, “A Hamiltonian formulation and a direct numerical scheme for fractional optimal control problems,”
Journal of Vibration and Control, vol. 13, pp. 1269–1281, 2007.
[6] M. O. Efe, “Fractional fuzzy adaptive sliding-mode control of a 2-DOF direct-drive robot arm,” IEEE Transactions on Systems, Man,
and Cybernetics, Part B, vol. 38, pp. 1561–1570, 2008 [7] Y. Li, Y. Chen, and H. S. Ahn, “Fractional-order iterative learning
control for fractional-order linear systems,” Asian Journal of
Control, vol. 13, pp. 54–63, 2011 [8] M. Romero, A. P. de Madrid, C. Mañoso, and R. Hernández,
“Generalized predictive control of arbitrary real order,” in New Trends in Nanotechnology and Fractional Calculus Applications,
D. Baleanu, et al., Eds., Dordrecht: Springer, 2009, pp. 411-418
[9] B. Shi, J. Yuan, and C. Dong, “On fractional model reference adaptive control,” The Scientific World Journal, vol. 2014, 2014.
[10] T. Vinopraba, N. Sivakumaran, S. Narayanan, and T. K. Radhakrishan, “Design of internal model control based fractional
order PID controller,” Journal of Control Theory and Applications,
vol. 10, pp. 297-302, 2012 [11] D. Li, W. Fan, Q. Jin, et al., “An IMC PIλDμ controller design for
fractional calculus system,” in Proc. 29th Chinese Control
Conference, Beijing, 2010, pp. 3581-3585 [12] T. Vinopraba, N. Sivakumaran, and S. Narayanan, “IMC based
fractional order PID controller,” in Proc. IEEE Conference on
Industrial Technology, Auburn, 2011, pp. 71 – 76 [13] D. Valerio and J. S. da Costa, "Tuning of fractional PID
controllers with Ziegler Nichols-type rules," Signal Processing,
vol. 86, pp. 2771-2784, 2006. [14] M. Vajta, “Fractional order model and controller of a heat
process” in Proc. 7th Vienna International Conference on Mathematical Modelling (MATHMOD), vol. 7, 2012, pp. 587
Cristina I. Muresan received the degree in Control Systems in 2007, and the Ph.D. in
2011 from Technical University of Cluj-
Napoca, Romania. She is currently lecturer within the Automation Department of the same
university. She has published over 50 papers and book chapters. Her research interests
include modern control strategies, such as
predictive algorithms, fractional order control, time delay compensation methods and
multivariable systems.
Eva-Henrietta Dulf received her B. Eng.
degree in Automation from Technical University of Cluj-Napoca, Romania, in 1997,
and her M.Sc. and Ph.D. degrees from the same university in 1998 and 2006,
respectively. In November 1998, she joined
Technical University of Cluj-Napoca as teaching assistant and she is now Associate
Professor. Current research interests include various areas in process control, including
mathematical modeling, controller design, optimization methods and
practical implementation. She’s published more than 100 technical journal papers and conference talks, and she is a member of IEEE.
Roxana Both received her B.Eng. degree in
Control Systems in 2008 and the Ph.D. in
2011 from Technical University of Cluj-Napoca, Romania. She is currently lecturer at
the same university at the Automation Department. Her current research interests
include process modelling and simulation,
process control strategies design and implementation: robust control, model
predictive control, fractional control. She has published more than 30 papers in journal and conferences.
221© 2015 Int. J. Mech. Eng. Rob. Res.
International Journal of Mechanical Engineering and Robotics Research Vol. 4, No. 3, July 2015








![Discrete-Time Fractional-Order PID Controller: Definition ... · arXiv:1405.0144v1 [math.OC] 1 May 2014 Discrete-Time Fractional-Order PID Controller: Definition, Tuning, Digital](https://static.documents.pub/doc/80x56/6040056c21c2e7483c0cd8e3/discrete-time-fractional-order-pid-controller-deinition-arxiv14050144v1.jpg)




![Fractional Cascading Fractional Cascading I: A Data Structuring Technique Fractional Cascading II: Applications [Chazaelle & Guibas 1986] Dynamic Fractional.](https://static.documents.pub/doc/80x56/56649ea25503460f94ba64dd/fractional-cascading-fractional-cascading-i-a-data-structuring-technique-fractional.jpg)



