AZƏRBAYCAN DÖVLƏT AQRAR UNİVERSİTETİ Kafedra: Fizika və riyaziyyat Fənn: Riyaziyyat Mühazirəçi: R.F.D. dosent Orucova Rəna Üzeyir qızı Ədəbiyyat: 1. Məmmədov R.H. Ali riyaziyyat kursu. Bakı, Maarif, 3 hissə 1978. 2. Ə.B.Əliyev, A.Hüseynov. Riyaziyyat, Bakı 2005 3. Курош А.Г. Курс высшей алгебры. Москва, Наука, 1971. 4. Кудрявцев В.А. ; Демидович Б.П. Краткий курсвысшей математики, Москва, Наука, 1989. 5. Ə.A.Vəliyev və başqaları. Ali riyaziyyatdan məsələ və misal həllinə rəhbərlik. I və II hissə Bakı,2001. 6. Alməmmədov M.S. və başqaları. İqtisadçılar üçün ali riyaziyyat kursuna aid məslə və misallar. Bakı,2009. 7. Шипачев В.С. Высшая математика, Москва, Высшая школа 1990. 8. Маркович Э.С. Курс высшей математики. Москва, Высшая школа, 1972.
Transcript
AZƏRBAYCAN DÖVLƏT AQRAR UNİVERSİTETİ
Kafedra: Fizika və riyaziyyat
Fənn: Riyaziyyat
Mühazirəçi: R.F.D. dosent Orucova Rəna Üzeyir qızı
Ədəbiyyat:
1. Məmmədov R.H. Ali riyaziyyat kursu. Bakı, Maarif, 3 hissə 1978.
2. Ə.B.Əliyev, A.Hüseynov. Riyaziyyat, Bakı 2005
3. Курош А.Г. Курс высшей алгебры. Москва, Наука, 1971.
5. Ə.A.Vəliyev və başqaları. Ali riyaziyyatdan məsələ və misal həllinə rəhbərlik. I və II hissə Bakı,2001.
6. Alməmmədov M.S. və başqaları. İqtisadçılar üçün ali riyaziyyat kursuna aid məslə və misallar. Bakı,2009.
7. Шипачев В.С. Высшая математика, Москва, Высшая школа 1990.
8. Маркович Э.С. Курс высшей математики. Москва, Высшая школа, 1972.
9. Кремер Н.Ш. Высшая математика для экономистов. Учебник. М;2010.
10. Тихомиров В.М. Дифференциальное исчисление (теория и приложения), М;2002.
11. Слободская В.А. Краткий курс высшей математики, Москва, Высшая школа, 1969.
12. Abdullayev F.S. Adi diferensial tənliklər.Kompleks dəyişənli funksiyalar. Bakı, Kür, 2002.
13. Orucova R.Ü. Qeyri-müəyyən inteqral. Müəyyən inteqral. Çoxqat və əyrixətli inteqrallar. Dərs vəsaiti. Gəncə, 2016.
14. Hüseynov O.M. Adi differensial tənliklərdən məsələ və misallar. AKTA, Gəncə 2003.
15. Məsimova S.N. Ali riyaziyyatın əsasları, Bakı, Yeni Nəsil, 2009
16.Piskunov N.S. Diferensial və inteqral hesabı. Bakı, Maarif, 1986.
17. Qmurman V.Y. Ehtimal nəzəriyyəsi və riyazi statistika məsələlərinin həllinə dair rəhbərlik. Bakı, Maarif, 1980.
18. 1. Əkbərov M. Ali cəbr, Bakı, Maarif, 1976.
19. Nağıyev Ə. Ədədi sistemlər, Bakı, Maarif, 1976.
20. İbrahimov İ.İ. Ədədlər nəzəriyyəsinin əsasları, Bakı, 1955.
21. Sultanov R.M. Xətti cəbrin əsasları, Bakı, 1960.
ADAU - 2017
Mövzu 1
Matris anlayışı. Determinantlar və onların xassələri.
1. Matris anlayışı, onların üzərində əməllər.
2. Determinantın tərifi və əsas xassələri.
3. Tərs matris anlayışı.
4. Matrisin ranqı.
1. Matris anlayışı, onların üzərində əməllər.
Tutaq ki, m və n natural ədədlərdir. mn sayda ədəddən düzbucaqlı
şəklində düzəldirmiş , m sayda sətri və n sayda sütunu olan cədvələ (m ·
n) – ölçülü matris deilir. Matrisi
a11 a12 ... a1n a21 a22 ... a2n . . . . . am1 am2 ..amn və ya
a11 a12 ... a1n
a21 a22 ... a2n - - - - - - - - - - am1 am2 ..amn
şəklində yazırlar. Bəzən qısa olmaq üçün matrisi böyük hərflə (A, B, C,
X, Y, ...), və ya ai j (i=1,2, ... n) şəklində işarə edirlər.
Matrisi təşkil edən ai j ədədlərinə onun elementləri deyilir. Elementin
aşaqısında yazılan iki (ij) indeksin birincisi (i) onun yerləşdiyi sətrin
nömrəsini, ikincisi (j) isə yerləşdiyi sütunun nömrəsini göstərir.
(m · n) ölçülü (1) matrisinin sətir və sütunlarının sayı bərabər (m=n)
olduqda, ona kvadrat matris deilir. Bu halda n ədədinə kvadrat matrisin
tərtibi deyilir. Məsələn
0 1 3
A = 3 5 B = 2 4 7
7 8 0 3 4
matrislərinin birincisi iki, ikincisi isə üçtərtiblidir. Bir elementdən ibarət
olan matrisə birtərtibli matris deyilir. Birtərtibli matrisi onu təşkil edən
yeganə ədədlə eyniləşdirirlər: a11= a11.
Ancaq bir sətri olan matrisə sətir-matris, ancaq bir sütunu olan matrisə
sütun-matris deyilir. Məsələn,
A = 2, 7, 8, 9 B = a, b, c matrisləri sətir-matrislər, 0 a1
C = 2 , D = b1 1 c1
4 d1
matrisləri isə sütun-matrislərdir.
n-tərtibli kvadrat
a11 a12 ... a1n A = a21 a22 ... a2n
. . . . . am1 am2 ..amn matrisinin sol yuxarı küncündə olan a11 elementi ilə sağ aşağı küncündə
olan amn elementini birləşdirən düz xətt parçası üzərində yerləşən a11, a22,
a33, ..., anm elementləri çoxluğu həmin matrisin baş diaqonalı adlanır.
Ancaq baş diaqonalının elementləri sıfırdan fərgli olan kvadrat matrisə
diaqonal matris deilir. Bütün elementləri vahidə bərabər olan diaqonal
matris vahid matris adlanır və In ilə işarə olunur. Birtərtibli vahid matris
I 1=[1 ] ikitərtibli vahid matris
I 2=[1 00 1]
Üçtərtibli vahid matris I 3=[1 0 00 1 00 0 1] və s.olar.
Bütün elementləri sıfra bərabər olan kvadrat matrisə sıfır matris deyilir
və O ilə işarə olunur. Məsələn,
0=[0 00 0] 0=[0 0 0
0 0 00 0 0]
matrisləri uyğun olaraq ikitərtibli və üçtərtibli sıfır matrislərdir.
Verilmiş A matrisinin bütün sətir və sütunlarının yerinin dəyişilməsinə
(nömrəsini saxlamaqla) həmin matrisin çevrilməsi (transponirə edilməsi)
deyilir və A ilə işarə olunur. Məsələn,
1 3 1 2 0 = 2 4 0 2 = 0 5 3 4 7 0 7 , 5 -7 2 -7 ,
[−30−1]
¿
=[−3 0 −1 ]
Aydındır ki, (A*)* = A olar. A = A* olduqda A matrisinə simmetrik matris deyilir. (2) matrisinin simmetrik olması şərtini ai j = ai j ( i, j = 1, 2, ..., n ) kimi yazmaq olar. ai j = - ai j olduqda A matrisinə çəpsimmetrik matris deyilir.
Bütün elementləri həqiqi ədədlər olan matrisə həqiqi, heç olmasa bir
elementi kompleks ədəd olan matrisə isə kompleks matris deyilir. Biz
burada həqiqi matrislərə baxırıq.
Eyni ölçülü və bütün uyğun elementləri bərabər olan matrislərə
bərabər matrislər deyilir.
Matrislərin cəmindən (fərgindən), ədədə və başqa matrisə
hasillərindən danışmaq olar.
Eyni (m · n) – ölçülü A =ai j və B = bi j (i=1, 2, ..., m; j=1,
2, ...,n) matrislərinin cəmi həmin ölçülü və hədləri
ci j = ai j + bi j (i=1, 2, ..., m; j=1, 2, ...,n)
(1)
kimi təyin olunan C = ci j (i=1, 2, ..., m; j=1, 2, ...,n) matrisinə deyilir
tamamlayıcısı isə A11 (-1)1+1M11 = a22; üçtərtibli (5) determinantının a13
və a23 elementlərinin minoru uyğun olaraq
M13 = |a21 a22
a31 a32| və M23 =|a11 a12
a31 a32| cəbri tamamlayıcıları isə
A13 = (-1)1+3|a21 a22
a31 a32| və A23 = (-1)2+3 |a11 a12
a31 a32|
T e o r e m 1. Hər bir hər hansı bir sətir və ya sütun elementlərinin öz cəbri tamamlayıcıları ilə hasillərinin cəminə bərabərdir. Teorem üçtərtibli determinantı ikitərtibli determinantlar vasitəsilə, ikitərtibli determinantı isə birtərtibli determinantlar vasitəsilə təyin etməyə imkan verir. Bu qayda ilə dörd, beş və s. tərtibli determinantları da ardıcıl olaraq təyin etmək olar. Məsələn, dördtərtibli a11 a12 a13 a14 A4 = a21 a22 a23 a24
Determinantın tərtibi artdıqca onun elementlərinin və hədlərinin sayı artır. DETERMINANTLARININ HESABLANMASINI ASANLAŞDIRAN BIR
SIRA XASSƏLƏR VARDIR. ISTƏNILƏN TƏRTIBLI
DETERMINANTLARA AID OLAN BU XASSƏLƏRI BIZ ANCAQ
ÜÇTƏRTIBLI DETERMINANTLAR ÜÇÜN BURADA SÖYLƏMƏKLƏ
KIFAYƏTLƏNIRIK.
X a s s ə 1. Determinantın bütün sətirləri ilə sütunlarının uyğun olaraq
yerini dəyişdikdə onun qiyməti dəyişməz:
a11 a12 a13 a11 a12 a13
∆ = a21 a22 a23 = a21 a22 a23 (3)
a31 a32 a33 a31 a32 a33
Bu bərabərliyin doğruluğunu isbat etmək üçün sol tərəfdəki
determinantı ∆ ilə, sağ tərəfdəki determinantı isə ∆* ilə işarə edək. ∆
determinantının birinci sətir elementləri üzrə ayrılışını və ∆*
determinantının birinci sütun elementləri üzrə ayrışını yazaq:
∆ = a11A11 + a12A12 + a13A13 , ∆*= a11A11* + a12A12* + a13A13*. A11 = A11*, A12 = A12* və A13 = A13* olduqda ∆ = ∆* . Determinantın bütün sətirləri ilə sütunlarının uyğun olaraq yerini dəyişməsinə onun çevrilməsi və ya transponirə edilməsi deyilir. Isbat etdiyimiz xassə göstərir ki, determinantın çevrilməsi zamanı onun qiyməti dəyişmir, yəni A matrisi ilə onun A* çevrilməsinin determinantları həmişə bərabərdir:
∆(A) = ∆(A*) (2)
N ə t i c ə. Hər bir determinantın sətirləri ilə sütunları eyni hüquqludur.
Buna görə də determinantın bundan sonraki xassələrini ancaq sətirləri və
ya ancaq sütunları üçün söyləmək kifayətdir.
X a s s ə 2. Determinantın iki sətrinin (və ya sütununun) bir-biri ilə
yerini dəyişdikdə determinantın ancaq işsarəsi dəyişər:
a11 a12 a13 a11 a12 a13
a21 a22 a23 = - a21 a22 a23
a31 a32 a33 a31 a32 a33 . Doğrudan da, sol tərəfdəki determinantın birinci sətir elementləri üzrə ayrılışını:
∆= a11A11 + a12A12 + a13A13
və sağ tərəfdəki determinantın ikinci sətir elementləri üzrə ayrılışını:
∆ꞌ= a11A11ꞌ + a12A12ꞌ + a13A13ꞌ
yazıb, A11 = - A11ꞌ, A12 = - A12ꞌ, A13 = - A13ꞌ olduğunu nəzərə alsaq, onda
(3) bərabərliyinin doğruluğu aydın olar.
X a s s ə 3. Iki sətri eyni olan determinant sıfra bərabərdir:
a11 a12 a13
∆= a21 a22 a23 = 0. a31 a32 a33 Doğrudan da, ∆ determinantında birinci və ikinci sətirlərin bir-biri ilə
yerini dəyişsək, onda ∆=-∆. Buradan 2∆=0, ∆=0
X a s s ə 4. Determinantın hər hansı bir sətir elementlərinin ortaq
vuruğu olarsa, onda həmin vuruğu determinantın xaricinə çıxarmaq olar.
a11 a12 a13 a11 a12 a13
λ a21 a22 a23 = λ a21 a22 a23 (4) a31 a32 a33 a31 a32 a33 Bu bərabərliyinin sol tərəfindəki determinantı ∆1=λa21A21+λa22A22+λa23A23=λ(a21A21+a22A22+a23A23) = λ∆. N ə t i c ə 1. Determinantın hər hansı bir sətrinin bütün elementləri
sıfır olduqda determinant sıfra bərabər olar.
Nəticənin doğruluğuna inanmaq üçün (4) bərabərliyində λ=0 götürmək
kifayətdir.
N ə t i c ə 2. Determinantı bir ədədə vurmaq üçün determinantın hər
hasnı bir sətrini həmin ədədə vurmaq kifayətdir.
Bu nəticənin doğruluğuna inanmaq üçün (4) bərabərliyini sağdan sola
oxumaq kifayətdir.
X a s s ə 5. Determinantın hər hansı bir sətrinin bütün elementləri iki
ədədin cəmi kimi verildikdə, həmin determinant iki determinantın
cəminə bərabər olar, bu determinantların birində həmin sətir elementləri
olaraq birinci toplananlar, o birində isə həmin sətir elementləri olaraq
A = a21 a22 ... a2n (∆A) 0) . . . . . . . . an1 an2 ... ann
matrisinin
A11 A21 ... An1
A-1= 1∆ ( A ) A12 A22 ... An2
. . . . . . . . . A1n A2n ... Ann
tərs matrisini qurmaq olar.
Misal 2.
A = [3 1 42 0 51 2 3 ] , ∆(A) = - 15
matrisinin tərs matrisi:
A-1 = 115 [ 10 −5 −5
1 −5 7−4 5 2 ] .
4. Matrisin ranqı.
Tutaq ki, (m · n) – ölçülü a11 a12 ... a1n
A = a21 a22 ... a2n
. . . . . . . . am1 am2 ... am n
matrisi verilmişdir. Bu matrisin ixtiyari k sayda sətrinin ixtiyari k sayda
sütunu ilə kəsişdiyi elementlər k-tərtibli bir kvadrat matris təşkil edir.
Bu k-tərtibli matrisin determinantına A martisinin k-tərtibli minoru
deyilir. Burada k ədədi m və n ədədlərinin kiçiyindən böyük ola bilməz.
A matrisinin heç olmasa bir elementi sıfırdan, fərqlidirsə, onda onun
sıfırdan fərqli minorları içərisində elə birisi vardır ki, onun tərtibi ən
böyükdür. A matrisinin sıfırdan fərqli minorları tərtiblərinin ən
böyüyünə həmin matrisin ranqı deyilir.
A matrisinin ranqını r(A) ilə işarə etsək, onun üçün
0¿ r (A )≤min (m , n ) (1)
bərabərsizliyi doğru olar.
Aydındır ki, A matrisinin ranqı r olarsa, onda onun sıfırdan fərgli r-
tərtibli minoru vardır və tərtibi r-dən böyük olan bütün minorları sıfra
bərabərdir.
Ranqı r olan A matrisinin sıfırdan fərgli olan r-tərtibli minoruna onun
bazis minoru deyilir. A matrisinin sıfırdan fərgli bir neçə r-tərtibli
minoru ola bilər. Bu halda, həmin minorların hər biri həmin matrisin
bazis minoru olur.
A matrisinin kəsişmələrində bazis minorun elementləri yerləşən sətir
və sütunlarına bazis sətirləri və bazis sütunları deyilir. Bazis minoru,
bazis sətir və sütunları haqqında aşağıdakı kimi təklif vardır:
T e o r e m ( bazis minoru haqqında teorem). Bazis sətirləri
(sütunları) xətti asılı deyildir. A matrisinin istənilən sətri (sütunu)
onun bazis sətirlərinin (sütunlarının) xətti kombinasiyasıdır.
Bu teoremdən istifadə edərək göstərmək olar ki, A matrisinin xətti
asılı olmayan sətirlərinin sayı (əlbəttə, maksimal sayı) onun ranqına
bərabərdir.
Misal 1.
A = (3 1 42 0 51 2 3)
matrisinin determinantı ∆(A) = - 15 0 olduğundan onun ranqı:
r (A) = 3.
Misal 2.
1 2 1 4 A = 0 1 -1 3 2 5 1 11
matrisinin bütün üçtərtibli minorları sıfra bərabərdir:
(1 2 10 1 −12 5 1 ) = (1 2 4
0 1 32 5 11) = (1 1 4
0 −1 32 1 11) = ... = 0
Lakin onun ikitərtibli
∆ = (1 20 1) = 1 0I
minoru sıfırdan fərglidir. Deməli, matrisin ranqı: r (A) = 2.
Mövzu 2
Xətti tənliklər sisteminin Kramer üsulu ilə həlli.
1. İkiməchullu iki xətti tənliklər sistemi.
2. Kramer üsulunun mahiyəti.
3. Üçməchullu üç xətti tənliklər sistemi.
1. İkiməchullu iki xətti tənliklər sistemi.
Tutaq ki, ikiməchullu iki xətti tənlik sistemi verilmişdir:
a11x + a12y = b1, (1)
a21x + a22y = b2.
Tənliklərin sağ tərəfi olan b1 və b2 ədədlərinin ikisi də sıfra bərabər, yəni b1=b2=0
olarsa, onda həmin sistemə bircinsli xətti tənliklər sistemi deyilir. b1 və b2
ədədlərinin heç olmasa biri sıfırdan fərgli olduqda (1) sisteminə bircinsli olmayan
xətti tənliklər sistemi deyilir. Sistemə daxil olan tənliklərin hər birini ödəyən
x=xo, y=yo qiymətlər çoxluğuna həmin sistemin həlli deyilir.
Verilmiş sistemin həlli ola da bilər, olmaya da bilər; sistemin həlli varsa, ona
uyuşan və ya birgə sistem, əks halda isə uyuşmayan və ya birgə olmayan sistem
deyilir. Tənliklər sistemi uyuşan olduqda onun bir və ya birdən çox həlli ola bilər.
Orta məktəbin riyaziyyat kursundan məlumdur ki, verilmiş tənliklər sistemi
əvəzetmə üsulunu, məchulların yox edilməsi üsulunu, xətti çevirmə üsulunu və
s.tətbiq etməklə həll olunur. Bu zaman verilmiş tənliklər sistemi onunla
eynigüclü (və ya ekvivalent) olan sadə tənliklər sisteminə gətirilir və sonra da
həmin sistemi həll etməklə verilmiş tənliklər sisteminin həlli tapılır.
Tənliklər sistemini xətti çevirmə üsulu ilə həll edərkən bəzən səhv mehakimə
aparıldığından həmin üsul haqqında əvvəlcə əlavə məlumat verməyi lazım bilirik.
Tutaq ki,
f1 (x,y) =0, (2)
f2 (x,y) = 0 .
sisteminin tənliklərini verilmiş λ1, λ2, μ1 və μ2 ədədlərinə növbə ilə vurub toplamaqla
λ1 f1 (x,y) + λ2 f2 (x,y) = 0, (3)
μ1 f1 (x,y) + μ2 f2 (x,y) = 0.
tənliklər sistemi alınmışdır. Bu halda deyirlər ki, (3) sistemi (2) tənliklər
sistemindən xətti çevirmə vasitəsilə alınmışdır.
d = = λ1μ1 - λ2 μ2
ədədinə həmin xətti çevirmənin determinantı deyilir.
Təbii bir sual qarşıya çıxır: (2) və (3) sistemləri eynigüclüdürmü?
T e o r e m.
d = 0 (4)
olarsa, onda (2) sistemi (3) sistemi ilə eynigüclüdür.
İ s b a t ı. (2) sisteminin həlli (xo , yo) olsun. Onda
f1 (xo , yo) = 0, f2 (xo , yo) = 0
doğru ədədi bərabərliklərdir. buradan, ixtiyari λ1, λ2, μ1 və μ2 ədədləri üçün doğru
olan.
λ1 f1 (xo ,yo) + λ2 f2 (xo ,yo) = 0,
μ1 f1 (xo ,yo) + μ2 f2 (xo ,yo) = 0
bərabərlikləri alınır ki, bu da (xo ,yo) əddələri cütünün (3) sisteminin həlli
olduğunu göstərir.
Eyni qayda ilə də (4) şərti ödənildikdə (3) sisteminin hər bir (xo ,yo) həlli (2)
sisteminin də həlli olduğunu isbat etmək olar.
Anoloji teorem n məchullu n tənlikl sistemi haqqında da doğrudur.
Q e y d. (4) şərti ödənilmədikdə (2) və (3) sistemləri eynigüclü olmaya da
bilər. Məsələn,
x + 3y – 10 = 0 (5)
2x – y + 1 = 0
tənliklər sistemi, ondan determinantı
d = = 0
olan xətti çevirmə ilə alınan
5x + y – 8 = 0, (6)
10x + 2y – 16 = 0
tənliklər sistemi ilə eynigüclü deyildir. (5) sisteminin yeganə (1, 3) həlli (6)
sisteminin də həllidir. Lakin (6) sisteminin (2, -2), (3, -7) və s. kimi çox (sonsuz
sayda) həlləri var ki, onlar (5) sisteminin həlli deyildir
2. Kramer üsulunun mahiyyəti.
(1) sistemini ∆ = a11a22 – a12a21 0 olduqda həll etmək üçün onun birinci
tənliyinin hər iki tərəfinə a22 , ikinci tənliyin hər iki tərəfini isə (-a12) ədədinə
vurub toplamaq, sondara birinci tənliyin hər iki tərəfini (a21) , ikinci tənliyin isə
hər iki tərəfini a11 ədəddinə vurub toplamaq lazımdır. Onda
(a11a22 – a12a21) x = b1a22 – b2a12,
(a11a22 – a12a21) x = a11b2 – b1a21
və yaxud
x =
y =
sistemini alırıq. Buradakı ikitərtibli determinantları
∆ = , ∆1 = ,∆2 =
ilə işarə etsək, sonuncu sistemi
∆ · x = ∆1 (7)
∆ · y = ∆2
kimi yazmaq olar. ∆ 0 olduğundan (1) və (7) sistemləri ekvivalentdir. Buna
görə də, (7) sisteminin yeganə
x = , y = (8)
həlli (1) sisteminin də yeganə həlli olur.
(8) düsturlarına Kramer düsturları, ∆ determinantına isə (1) sisteminin determinantı deyilir.
Beləliklə, isbat etmiş oluruq ki, (1) sisteminin ∆ determinantı sıfırdan fərgli olduqda həmin sistemin yeganə həlli var və bu həll (8) Kramer düsturları vasitəsilə tapılır. Buna Kramer qaydası deyilir.
İndi (1) sisteminin ∆ determinantı sıfır olan hala baxaq.
∆ = = 0
Olduqda məlum teoremə görə:
a21 = λa11, a22 = λa12 (9)
Onda (1) sisteminin ikinci tənliyinin sol tərəfi birinci tənliyin sol tərəfini λ ədədinə vurmaqla alınar:
a21x + a22y = λ (a21x + a12y) .
(10) Buradan aşağıdakı kimi nəticələr alırıq:
1. Əgər (1) sisteminin sağ tərəfindəli b1 və b2 ədədləri (9) münasibətinə uyğun
b2 = λ b1 (11)
münasibətini ödəyərsə, onda (1) sisteminin ikinci tənliyi birinci tənliyindən λ
ədədinə vurulmaqla alınar. Bu halda sistemin birinci tənliyinin hər bir həlli ikinci
tənliyinin və buna gğrə də (1) sisteminin həlli olar.
Sistemin birinci
a11x + a12y = b1 (12)
tənliyinin isə sonsuz sayda həlli var: dəyişənin birinə ixtiyari qiymətlər verərək
(12) tənliyindən ikinci dəyişənin qiymətlərini tapsaq, onda tapəlan ədədlər (12)
tənliyinin həlli olar.
Deməli, bu halda (1) sisteminin sonsuz sayda həlli var,
2. Əgər b1 və b2 ədədləri (11) münasibətini ödəməzsə, yəni b2 λb1 olarsa, onda
(1) sisteminin həlli olmaz. Çünki, bu halda, sistemin birinci
a11x + a12y b1
tənliyini ödəyən heç bir x = xo və y = yo ədədləri ikinci tənliyini ödəyə bilməz:
a21 xo + a22 yo λ b1 b2 .
dediklərimizə əsasən belə bir nəticə aliriq: (1) sisteminin determinantə sıfırdan
fərgli (∆ 0) olduqda həmin sistemin yeganə həlli var, sistemin determinantı sıfır
olduqda isə həmin sistemin ya sonsuz sayda həlli var, ya da heç bir həlli yoxdur.
N ə t i c ə. ∆ 0 olduqda
a11x + a12y = 0,
a21 x + a22 y = 0 (13)
bircinsli xətti tənliklət sisteminin yeganə x=0, y=0 həlli (sıfır həlli) var. =0
olduqda isə (13) sisteminin sonsuz sayda sıfır olmayan həlli olar.
3. Üçməchullu üç xətti tənliklər sistemi.
Üçməchullu üç xətti tənlik sistemi
a11x + a12y + a13z = b1,
a21 x + a22 y + a23 = b2, (1)
a31x + a32y + a33 = b3
şəklində yazıla bilər. b1 = b2 = b3 = 0 olduqda (1) sistemindən bircinsli xətti
tənliklər sistemi alınır. b1, b2, b3 ədədlərinin heç olmasa biri sıfırdan fərgli
olduqda (1) sisteminə bircinsli olmayan xətti tənliklər sistemi deyilir.
(1) sisteminin hər bir tənliyini doğru ədədi bərabərliyə (eyniliyə) çevirən x=0,
y=0, z=0 qiymətlər çoxluğu həmin sistemin həlli adlanır. Sistemin həlli varsa,
ona uyuşan, heç bir həlli olmadıqda isə ona uyuşmayan (uyuşan olmayan) sistem
deyilir.
Verilmiş (1) sistemini həll etmək üçün həmin sistemin determinantını
ilə, determinantın aik elementinin cəbri tamamlayıcısını isə Aik ilə işarə edək. (1)
sisteminin birinci tənliyini A11-ə ikinci tənliyini A21-ə, üçüncü tənliyini A31-ə
vurub, alınan bərabərlikləri tərəf-tərəfə toplasaq
(a11A11 + a21A21 + a31A31) · x + (a12A11 + a22A21 + a32A31) · y + (a13A11 +
+a23A21 + a33A31) · z = b1A11 + b2A21 + b3A31 (2)
bərabərliyini aliriq. Determinantların sətir və sütun elementləri üzrə ayrılması
xassəsinə görə:
∆ = a11A11 + a21A21 + a31A31,
0 = a12A11 + a22A21 + a32A31,
0 = a13A11 + a23A21 + a33A31.
Onda (2) bərabərliyi
∆ · x = b1A11 + b2A21 + b3A31
şəklində yazılar.
Eyni qayda ilə də (1) sisteminin tənliklərini əvvəlcə uyğun olaraq A12, A22, A32 ədədlərinə, sonra da A13, A23, A33 ədədlərini vurub alınan bərabərlikləri tərəf-tərəfə toplasaq
∆ · y = b1A12 + b2A22 + b3A32
və
∆ · z = b1A13 + b2A23 + b3A33
Bərabərliklərini aliriq. Beləliklə, (1) sistemi əvəzinə
∆x = b1A11 + b2A21 + b3A31 ,
∆y = b1A12 + b2A22 + b3A32 , (3)
∆z = b1A13 + b2A23 + b3A33
sistemi alınır.
Mövzu 3
Hauss üsulu. Xətti tənliklər sisteminin matris şəklində
yazılması və həlli.
1.Qauss üsulunun mahiyyəti.
2. Matris üsulunun mahiyyəti.
1.Qauss üsulunun mahiyyəti.
Tutaq ki, xətti tənliklər sistemi verilmişdir:
a11x1 + a12x2 + ... + a1nxn = b1,
a21x1 + a22x2 + ... + a2nxn = b2,
. . . . . . . . . . . . . . . . (1)
an1x1 + an2x2 + ... + annxn = bn,
Bu sistemin determinantı sıfırdan fərgli olduqda onu Kramer qaydası ilə həll
etmək olar. Lakin bu halda n+1 sayda n-tərtibli determinant hesablamaq lazım
gəlir ki, bu da bğyük hesablama işi tələb edir.
Verilmiş xətti tənliklər sistemində məchulların sayı tənliklərin sayına bərabər
olmaqda, yəni sistem
a11x1 + a12x2 + ... + a1mxm = b1,
a21x1 + a22x2 + ... + a2mxm = b2,
. . . . . . . . . . . . . . . . (2)
an1x1 + an2x2 + ... + anmxm = bn,
şəklində olduqda isə onun həllinə Kramer qaydasına bilavasitə tətbiq etmək
olmur.
Buna görə də, (2) (və həm də (1) ) şəklində xətti tənliklər sistemini çox zaman
məchulların ardıcıl yox edilməsi üsulu və ya Hauss üsulu ilə həll edirlər. Bu
üsulun məzmunu belədir: tutaq ki, a11 0. Onda sistemin birinci tənliyini hər iki
tərəfini a21
a11 ədədinə vuraraq, alınan
a21x1 + a12 a21
a11 x2 + ... +
a1 m a21
a11xm = b1
a21
a11
tənliyini sistemin ikinci tənliyindən tərəf-tərəfə çıxırıq. Aldığımız tənlikdə x1
məchullu iətirak etmir:
aꞌ22x2 + aꞌ23x3 + ... + aꞌ2mxm = bꞌ2
Sonra sistemin birinci tənliyinin hər iki tərəfini a31
a11 ədədinə vuraraq tənliyi
sistemin üçüncü tənliyindən tərəf tərəfə çıxırıq. Bu mühakiməni ardıcıl tətbiq
etməklə (2) sistemini
a11x1 + a12x2 + ... + a1mxm = b1
aꞌ22x2 +... + aꞌ2mxm = bꞌ2
. . . . . . . . . . . . . (3)
aꞌn2x2 +... + aꞌnmxm = bꞌn
şəklində sistemə götürmək olar. Aldığımız yeni sistemin 2-ci, 3-cü və s.
tənliklərindən istifadə etməklə yuxarıda gğstərdiyimiz üsulla x2 məchulunu da
çox etmək olar. Bu mühakiməni ardıcıl olaraq tətbiq etməklə (2) sistemini ona
ekvivalent olan
a11x1 + a12x2 + a13x3 + ... + a1mxm = b1
aꞌꞌ22x2 + aꞌꞌ23x3 + ... + aꞌꞌ2mxm = bꞌꞌ2
aꞌꞌ33x3 + ... + aꞌꞌ3mxm = bꞌꞌ3 (4)
. . . . . . . . . . . . . .
şəklində sistemə gətirmək mümkündür.
(4) sisteminə pilləvarı (və ya pillələr çəklində) sistem, a11, aꞌꞌ22, aꞌꞌ33 və s.
əmsallarına isə sistemin baş elementləri deyilir. Aydındır ki, sistemə Hauss
üsülunun tətbiq oluna bilməsi üçün sistemin baş elementlərinin sıfırdan fərgli
olması zəruri və kafi şərtdir.
Qeyd edək ki , (2) sisteminin çevrilməsi nəticəsində alınan (4) sistemi uyuşan
və ya uyuşmayan ola bilər. Birinci halda (4) sistemini həll edərək (2) sisteminin
axtarılan həlləri tapılır. (4) sistemi uyuşmayan olduqda(məsələn, sistemdə sol
tərəfdəki bütün əmsalları sıfır olan, lakin sağ tərəfi sıfır olmayan 0 · x1 + 0 · x2
+ ... + 0 · xm = b, (b 0) şəklndə tənlik alındıqda ) (2) sistemi də uyuşmayan olar.
Qeyd edək ki, (4) sistemi uyuşan olduqda iki haldan ancaq biri mümkündür:
həmin sistemin ya yeganə həlli var, ya da sonsuz sayda həlli var. Hesablama
zamanı heç bir yuvarlaqlaşdırma aparılmayıbsa, onda Hauss üsülu ilə tapılmış
həll dəqiq olur.
(2) sistemini Qauss üsulu ilə həll edərkən tənliklər üzərində aparılan əməllər
bəzən onların əmsallarından düzəlmiş
a11 a12 ... a1m b1
a21 a22 ... a2m b2
. . . . . . . . . .
an1 an2 ... anm bn
matrisi üzərində aparmaq daha münasib olur.
Qauss üsulunu tətbiq etməklə aşağıdakı tənliklər sistemini həll edək:
Tərif. Ədədi qiymətindən başqa istiqaməti də verilmiş kəmiyyətlərə vektorial
kəmiyyətlər deyilir.
Məsələn; yerdəyişmə, sürət, təcil, qüvvə, cismin cəkisi və s. Əgər vektor AB, CD
kimi göstərilərsə burada birinci hərf vektorun başlnğıc, ikinci hərf isə son nöqtəsi
işarə edir. Vektorlar bir həriflədə a ,b, c və s. kimidə göstərilir. B D
a c
A C b
Başlanğıc və son nöqtələri üst-üstə düşən vektorlara sıfır vektorlar deyilir, və ō –
ilə işarə olunur.
Tərif. Modulları bərabər, bir-birinə paralel və istiqamətləri eyni olan
vektorlara bərabər vektorlar deyilir.
Tərif. Bir düz xətt və ya paralel düzxətlər üzərində yerləşən vektorlara
koleniar vektorlar deyilir.
a
b a
a b b
Nəticə; Bərabər vektorlar koleniar ola bilər, amma koleniar vektorlar bərabər
olmaya bilər.
2. Vektorlar üzərində əməllər.
Tərif. avə b vektorları üzərində aşağıda göstərilən qayda ilə qurulmuş c
vektoruna həmin vektorun cəmi deyilir və c = a + b ilə işarə olunur.
b b
a a
c
Vektorların cəmi ücün
a + b = b + a ; (a + b) + c = a + (b + c) ; a + 0 = a
xassələri doğrudur.
Tərif. а vektorunun həqiqi (skalyar) λ ədədinə a λ = λ ahasili aşağıdakı kimi
təyin olunan b vektorlarına deyilir.
1) b = λ⋅ a ; olsun.
2) λ⟩0 olduqda, a və b vektorlarının istiqamətləri eyni , λ⟨0 olduqda isə b-nin
istiqaməti, a- nın istiqamətinin əksinə olsun. a və b vektorlarının cəmini və fərqini
həndəsi olaraq paraleloqram qaydası ilə tapmaq olar.
ab - a a a + b a
b
b
Qeyd edək ki, vektorlar arasında < və > işarəsini yazmaq olmaz, vektorlar ancaq modulları ilə müqayisə oluna bilər. Skalyar ədədlə vektoru cıxmaq (toplamaq) olmaz.
3. Vektorların xətti asılılığı.
Tutaq ki, a1 , a2 , ... , an vektorları verilib və λ1 , λ2 , ... , λn həqiqi ədədlərdir. Belə ifadələrə baxaq.
λ1 a1 + λ2 a2 + ... + λn an (1)
b = λ1 a1 + λ2 a2 + ... + λn an (2)
Tərif. Əgər
λ1 a1 + λ2 a2 + ... + λn an = 0 (3)
Münasibəti hec olmasa λ1 , λ2 , ... , λn bir sıfırdan fərqli olduqda ödənilərsə , onda a1 , a2 , ... , an vektorlarına xətti asılı vektorlar deyilir.
Tərif. (3) münasibəti yalnız λ1 , λ2 , ... , λn =0 olduqda ödənilərsə , onda a1 , a2 ,
... , an vektorlarına xətti asılı olmayan vektorlar deyilir.
Teorem 1. a1 , a2 , ... , an vektorlarının xətti asılı olması ücün onlardan birinin
yerdə qalanların xətti kombinaziyası olması zəruri və kafi şərtdir.
Xətti asılılığın tərifinə görə , tutaq ki λ1 , λ2 , ... , λn - dan biri məsələn λ≠0 – dır.
Onda
(3) tənliyindən alarıq
- λn an = λ1 a1 + ... + λn-1 an−1 ; (4)
an = - λ1
λn · a1 + ... + -
λn−1
λn · an−1 ; (λn ≠ 0)
və yaxud
an = μ1a1 + ... + μk an−1 ; μk = - λk
λn ; k = 1, ..., n = 1 (5)
bu isə аn vektorunun a1 , a2 , ... , an vektorlarının xətti kombinasiyası olmasını
göstərir.
Teorem 2. a və b , с vektorlarının xətti asılı olması onların komplanar olması
üçün zəruri və kafi şərtdir.
4. Vektorların bazis üzrə ayrılışı.
Əgər a vektoru e1 , ... ,en vektorlarının xətti kombinasiyadırsa , yəni
a1 = λ1 e1 + ... + λn en (1)
olduqda , həmdə deyilir ki , a vektoru e1 , ... , en vektorları üzrə ayrılmışdır.
Xüsusi halda
a = λ1 e1 + λ2 e2 (2)
a = λ1 e1 + λ2 e2 + λ3 e3 (3)
ola bilər.
Tərif. Müstəvi üzərində yerləşən , koleniar olmayan və müəyyən ardıcıllıqla
götürülən e1 , e2 vektorlarına həmin müstəvidə bazis deyilir.
Teorem 1. Müstəvi üzərində yerləşən, hər bir avektorunu bu müstəvi
üzərində e1 , e2 bazisi üzrə
a = λ1 e1 + λ2 e2 (4)
ayrılışını yazmaq olar və bu ayrılış yeganədir.
Isbatı. e1 , e2 vektorları koleniar olmadığından onların heç biri sıfır deyil. e1 , e2
və
a vektorlarının başlanğıcını bir “ 0 ” nöqtəsinə köçürək;
a e1 e2
E1 A
e1 a
0 e2 E2
vektorların toplama qaydasına görə
a = 0E1 + 0E2 = λ1 e1 + λ2 e2
alarıq. Yəni (4) ifadəsini alarıq. Bunun üçün əksini fərz edək, yəni fərz edək ki,
başqa bir a = μ1e1 + μ2e2 (5)
ayrılışı da var. (4) və (5) –in fərqinə baxaq, onda
(μ1 - λ1 ) e1 + (μ2 – λ2 ) e2 = 0 (6)
olar.
5. Koordinat sistemi.
Tutaq ki, fəzada e1 , e2, e3 bazisi verilib , və bu bazis vektorlarının başlanğıc
nöqtələrini fəzanın bir “ 0 ” nöqtəsinə köçürək. Onda fəzanın istənilən M-
nöqtəsinin vəziyyətini 0-nöqtəsinə nəzərən təyin emək olar.
0-nöqtəsilə M nöqtəsini birləşdirən OM -vektorunun rm-lə işarə edib, onu M
Tərif. 0 nöqtəsi və e1 , e2, e3 bazisi birlikdə fəzada Dekard koordinat sistemi
adlanır və 0 e1 , e2, e3 ilə işarə olunur. M –nöqtəsinin rm =OM radius-vektorunun
λ1 , λ2 , λ3 koordinatlarına M –nöqtəsinin həmin koordinat sistemində addun
koordinatları deyilir. Və M (λ1 , λ2 , λ3 )- ilə işarə olunur.
Əgər bazis vektorlar qarışılıqlı perpendikulyar olarsa və onların uzunluqları vahid
olarsa belə koordinat sisteminə düzbucaqlı Dekard koordinat sistemi deyilir.
y y
j x z
0 0
i x
1. Tutaq ki, fəzada
a = ax i + ay j + az k a (ax + ay + az )
b = bx i + by j + bz k b (bx + by + bz )
vektorları verilib.
λa = (λax¿ i + (λay) j + (λaz) k
onda
a + b = ( ax± bx ) i + ( ay± by ) j + ( az± bz ) k
olar.
2. Əgər a = b olarsa , onda ax = bx , ay = by , az = bz olar.
3. a = √ax2+ay
2+az2
6. Yönəldici kosinuslar və vektorun uzunluğu.
Koordinatları ilə verilmiş
a = ax i + ay j + az k
Vektorunun modulunu (uzunluğunu) hesablamaq. Bu məqsədlə a vektorunun
baəlanğıcını koordinat başlanğıcına köçürmək və onun koordinat oxları üzərində
ax = OP, ay = OQ, az = OR proyeksiyalarını tapaq. OP, OQ, OR parçaları
üzərində düzbucaqlı paralelepiped qursaq, onun diqaonalı OM = a olar.
Buradan:
z
R a 2 = ax2+ay
2+az2
az və ya
a = ax2+ay
2+az2 (1)
M
0 γ β Q Tutaq ki, a vektorunun koordinat oxlarının
ax α ay y müsbət istiqaməti ilə əmələ gətirdiyi bucaqlar
P α ,β və γ – dır. Bu bucaqlar a vektorunun yönəldici
bucaqları deyilir. a vektorunun koordinat oxları
x Şəkil 1 üzərindəki ax , ay və az proyeksiyalarını
ax = a cos α, ay = a cos β, az = a cos γ
kimi tapmaq olar.
Buradan:
cos α = ax
a , cos β=¿
ay
a , cos γ =
az
a (2)
və ya
cos α = ax
√ax2+a y
2 +az2 ,
cos β = ay
√ax2+a y
2 +az2 , (3)
cos γ = az
√ax2+a y
2 +az2 .
(2) bərabərliklərini kvadrata juksəldib tərəf-tərəfə toplasaq və (1) bərabərliyini
nəzərə alsaq:
cos2α + cos2β + cos2γ = 1 (4)
cos α, cos β və cos γ kəmiyyətlərinə a vektorunun yönədici kosinusları deyilir. a
vektoru vahid vektor olarsa, onda
ax = cos α , ay = cos β , az = cos γ ,
yəni vahid vektorun yönəldici kosinusları onun uyğun koordinatlarıdır.
Tutaq ki, M1 ( x1 , y1 , z1 ) və M2 ( x2 , y2 , z2 ) nöqtələri verilmişdir. Onda:
r M 1 = x1 i + y1 j + z1 k
və
r M 2 = x2 i + y2 j + z2 k z
z M1
M
M1 M2 r1 r
r M1 r2 M2
r M 2
0 y 0 y
x
Şəkil 2 x Şəkil 3
Şəkildən aydındır ki,
M 1 M 2 = r M 2 - r M 1
və ya
M 1 M 2 = ( x2 – x1 )i + ( y2 – y1 ) j + ( z2 – z1 ) k (5)
Vektorun uzunluğu üçün tapdığımız (1) düsturuna əsasən:
M 1 M 2 = √(x 2 – x1)2+( y2 – y1)2+(z2 – z 1)2
Deməli, verilmiş M1 ( x1 , y1 , z1 ) və M2 ( x2 , y2 , z2 ) nöqtələri arasındakı məsafə
d = √(x 2– x1)2+( y2 – y1)2+(z2 – z 1)2 (6)
düsturu ilə hesablanar.
Mövzu 5
Vektorların skalyar və vektorial hasili. Paraleloqramın və
üçbucaqın sahəsi. Üç vektorun qarışıq hasili. Paralelepiped və
piramidanın həcmi.
1. Vektorların skalyar hasili.
2. Vektorların vektorial hasili.
3. Paraleloqramın və üçbucaqın sahəsi.
4. Üç vektorun qarışıq hasili.
5. Paralelepiped və piramidanın həcmi.
1. Vektorların skalyar hasili.
a və b vektorların uzunluqları ilə aralarındakı bucağın kosinusu hasilinə
onların skalyar hasili deyilir. Belə işarə olunur a · b , a b, (a , b) .
φ = (a ,ˆ b) olduqda tərifə görə;
(a , b) = a · b ·cos φ və ya a · b = a · b ·cos φ (1)
olar.
İki vektorun skalyar hasilinin (1) ifadəsini başqa şəkildədə yazmaq olar. Bu
məqsədlə a vektorunun b vektoru üzərində proyeksiyasının
Prba = a cos φ, φ = (a ,ˆ b)
olduğunu nəzərə almaq lazımdır. Onda (1) bərabərliyini
(a , b) = b Prba (2)
və
(a , b) = a Prba (3)
kimi yazmaq olar.
Xüsusi halda a = b olduqda φ =0 və cos φ = 1 olar və (1) münasibəti
a · a = a2 = a2 (4)
şəklində yazılır. Deməli bir vektorun skalyar kvadratı (özünə skalyar hasili)
həmin vektorun uzunluğunun kvadratına bərabərdir. (4) bərabərliyindən a
vektorunun uzunluğu üçün
a = √(a)2 (5)
düsturu alıtıq.
Vektorların skalyar hasilinin aşağıdakı xassələri də vardır:
I. Skalyar hasil yerdəyişmə ( kommutativlik ) xaəsinə tabedir:
( a , b ) = ( b , a ). (6)
II. Skalyar vuruğu skalyar hasil işarəsi xaricind çıxarmaq olar:
( λa, b ) = λ( a, b ) = ( a, λb ) (7)
III. Skalyar hasilin paylanma ( distributivlik ) xassəsi vardır:
( a + b , c ) = ( a , c ) + ( b , c ). (8)
IV. a = ax i + ay j + az k və b = bx i + by j + bz k vektorlarını skalyar hasili
onların koordinatları ilə
(a , b) = axbx + ayby + azbz (9)
şəklində ifadə olunur. Ortlar üçün lyar hasili aşağıdaki kimi alarıq:
i · i = 1, j · j = 1, k · k = 1
i · j = 0, i · k = 0, j · k = 0.
Xüsusi halda, a = b olarsa, onda (9) bərabərliyini
a 2 = ax2 + ay
2 + az2
kimi yazmaq olar. Buradan və (5) düsturundan a vektorunun uzunluğu üçün
a = √a x2+a y 2+a z 2 (10)
düsturunu alırıq.
V. (1) , (9) və (10) düsturlarına əsasən a və b vektorları arasındakı φ bucağını
hesablamaq üçün
cos φ = (a ,b)a· b
və ya
cos φ = a xb x+a y b y+a zb z√a x 2+a y 2+a z2 ·√b x 2+b y2+bz 2
düsturunu almaq olar. Buradan a və b vektorlarının ortoqonal olması şərti alınır: a və b vektorlarının ortoqonal olması üçün
axbx + ayby + azbz = 0
münasibətinin ödənilməsi zəruri və kafi şərtdir.
VI. Verilmiş a və b vektorları və ixtiyari c vektoru üçün
a · c = b · c (12)
münasibəti ödənilirsə, onda a = b.
2. Vektorların vektorial hasili.
Müəyyən ardicillıqla götürülmüş və komplanar olmayan a(birinci), b (ikinci) və
c (üçüncü) vektorları götürək. Bu vektorların başlanğıcına bir nöqtəyə köçürsək,
aşağıdakı iki vəziyyətin biri alınır:
I. c vektorunun son ucundan baxdıqda a vektorunu b vektoru üzərinə gətirmək
üçün kiçik bucaq gədər fırlama saat əqrəbi hərəkitinin əksinə olur. Bu halda,
deyirlər ki, a ,b , c vektorları üçlüyü sağ oriyentasiyalıdır və ya sağ üçlükdür.
II. c vektorunun a vektorunu b vektoru üzərinə gətirmək üçün kiçik bucaq gədər
fırlama saat əqrəbi hərəkitinin istiqamətində olur. Bu halda isə a ,b , c vektorları
sol oriyentasiyalı üçlük və ya sol üclük adlanır.
Əgər i , j , k Dekart koordinat bazisi üçlüyü sağ oriyentasiyalıdırsa, onda
koordinat sisteminə sağ Dekart koordinat sistemi, həmin üçlük sol oriyentasiyalı
olduqda isə koordinat sisteminə sol Dekart koordinat sistemi deyilir.
Biz urada sağ Dekart koordinat sistemindən istifadə edəcəyik.
Tərif. a(birinci) vektorunun b (ikinci)vektoruna vektorial hasili aşağıdakı üç
şərti ödəyən c vektoruna deyilir:
1) c vektorunun uzunluğu a və b vektorları üzərində qurulmuş paraleloqramın
sahəsinə bərabər olsun:
c = a b sin φ , φ = (a ,ˆ b).
2) c vektoru a və b vektorlarının mustəvisinə perpendikulyar olsun.
3) a ,b , c üçlüyü sağ oriyentasiyalı olsun.
a və b vektorlarının vektoriyal hasili c = [a , b ] və ya c = a · b ilə işarə olunur.
Tərifdən aydındır ki, kollinear olan a və b vektorların vektorial hasili sıfra
bərabərdir. Bunun tərsi də doğrudur. Deməli a və b vektorlarının kollinear olması
üçün onların vektorial hasilinin sıfra bərabər olması, [a , b ] = 0, zəruri və kafi
şərtdir. Xüsusi halda,
a · a = 0.
Vektorlarının vektorial hasilinin aşağıdakı xassələri vardır.
I. Vektorial hasil yerdəyişmə (kommutativlik) xassəsinə tabe deyildir
a · b = - b · a . (1)
II. Skalyar vuruğu vektorial hasil işarəsi xaricinə çıxarmaq olar:
(λa) · b = a · (λb) = λ(a · b). (2)
III. Vektorial hsdilin paylanma xassəsi vardır:
a · (b+c) = a · b + a · c , (3)
(a + b) · c = a · c + b+c. (4)
3. Paraleloqramın və üçbucaqın sahəsi.
Tutaq ki, a ( ax, ay, az ) və b ( bx, by, bz ) vektorları öz koordinatları ilə
verilmişdir. Bu vektorların vektorial hasilinin verilmiş koordinatlarla ifadəsini
tapaq. Bu məqsədlə i , j , k koordinat ortlarının cüt-cüt vektorial hasillərini
hesablayaq. Vektorial hasilin tərifinə görə:
i · i = 0, j · j = 0, k · k = 0.
Koordinat ortlarının yerləşməsində isə aydındır ki,
z i · j = k , i · k = - j,
j · k = i, j · i = - k,
k k · i = j, k · j = - i.
Onda
0 j y a = ax i + ay j + az k
və
i b = bx i + by j + bz k
x vektorlarının vektorial hasilini
a · b = a y az
b y bz · i +
az ax
bz bx · j +
ax a y
bx b y · k (1)
a · b = i j kax a y az
bx b y bz
(2)
yazmaq olar.
N ə t i c ə 1. Iki tərifi uyğun olaraq
a ( ax , ay , az ) və b ( bx , by , bz )
olan üçbucaqin sahəsi, həmin vektorlar üzərində qurulmuş paraleloqramın
sahəsinin yarısına bərabərdir:
S∆ = 12 a · b . (3)
Əgər üçbucaqın verilmiş A( x1, y1, z1 ), B (x2, y2, z2) və C(x3, y3, z3) təpələrini
birləşdirsək a = AB və b = AC vektorlarını alırıq. Bu vektorların koordinatları:
ax = x2 – x1, ay = y2 – y1, az = z2 – z1,
bx = x3 – x1, by = y3 – y1, bz = z3 – z1.
Onda üçbucağın sahəsini
S∆ = 12 √a y az
b y bz
²+az ax
bz bx
²+ax ay
bx by
²
düsturunda ax, ay, az, bx, by, bz ədədlərinin yerinə göstərilən qiymətləri yazmaqla
hesablamaq olar.
N ə t i c ə 2. a ( ax , ay , az ) və b ( bx , by , bz ) vektorlarının kollinear olması
üçün zəruri və kafi şərt
ax
bx =
ay
by =
az
bz
(4)
olmasıdır.
Misal 1. a (1, -2, 3) və b(2, 1, -1) vektorları üzərində qurulmuş
paraleloqramın sahəsini tapmalı
(1) düsturuna görə
a · b= - i + 7 j + 5k
olduğundan
S = a · b = √1+49+25 = 5√3
4. Üç vektorun qarışıq hasili.
Tərif. a (birinci) , b (ikinci) və c (üçüncü) vektorlarının birinci ikisinin a · b
vektprial hasilinin üçüncü c vektoruna skalyar hasili, yəni (a · b) · c igadəsi,
həmin vektorların qarışıq və (a , b , c) və yaxud a b c ilə işarə olunur.
Tərifdən aydındı r ki, üş vektorun qarışıq hasili skalyar kəmiyyətdir.
Teorem. Komplanar olmayan a, b, c vektorlarının qarışıq hasilinin modulu
həmin vektorlar üzərində qurulmuş paralelepipedin həcminə bərabərdir.
V = (a · b) · c (1)
a b c = ax a y az
bx b y bz
cx c y cz
(2)
Qarışıq hasil üçün tapdığımız (2) göstərilişindən istifadə edərərk, onun bir sıra
xassələrini müəyyən etmək olar.
I. a , b , c vektorlarının dairəvi yerdəyişməsiqarışıq hasili dəyişmir:
a b c = b c a = c ab (3)
II. Vuruqlarının dairəvi olmayan başqa yerdəyişməsi nəticəsində qarışıq hasilin
ancaq işarəsi dəyişir:
a b c = - b c a = - (a c b) = - (c b a ) (4)
III. Qarışıq hasil vuruqlarının hər birinə nəzərən xəttidir. λ və μ ədədləri üçün
(λ1a1 + λ2a2) b c = λ1(a1b c) + λ2(a2 b c) (5)
bərabərliyi doğrudur.
IV.Üc a , b , c vektorunun komplanar olması üçün onların qarışıq hasilinin sıfra
bərabər olması, yəni
a b c = 0 (7)
və yaxud
ax a y az
bx b y bz
cx c y cz
= 0 (8)
olması zəruri və kafı şərtdir.
5. Paralelepiped və piramidanın həcmi.
Üç vektorun qarışıq hasili haqqında yuxarıda isbat etdiyimiz teoremnən
istifadə edərək, təpələti verilmiş M1, M2, M3, M4 nöqtələri olan piramidanın
həcmini hesablamaq olar.
V = 16 a b c (9)
və ya
V = 16
ax a y az
bx b y bz
cx c y cz
(10)
Misal 1. Təğələri M1 (1,2,0), M2 (-1,0,1), M3 (2,-2,1) və M4 (3,2,1) olan
piramidanın həcmini hesablamalı.
Bu məqsədlə,əlcə a = M 1 M 2 , b = M 1 M 3 , və c = M 1 M 4 vektorlarını tapaq:
a = -2i - 2 j + k, b = i - 4 j + k, c = 2 · i + 0 · j + k .
Onda (1) düsturuna görə
V = 16
−2 −2 11 −4 12 0 1
= 16 -8-4+8+2 = 1
3 .
Mövzu 6
Müstəvidə analitik həndəsə. Düz xəttin tənlikləri.
1. Müstəvidə analitik həndəsə.
2. Düz xəttin bucaq əmsallı tənliyi.
3. Düz xəttin ümumi tənliyi.
4. Düz xəttin polyar koordinatlarda tənliyi.
5. Düz xəttin parçalarla tənliyi.
6. Düz xəttin normal tənliyi.
7. Nöqtədə düz xəttə gədər olan məsafə.
1. Müstəvidə analitik həndəsə.
Tərif 1. Verilmiş Oxy koordinat sistemində L xəttinin tənliyi elə F(x,y)=o (1) tənliyinə deyilir ki, onu yalnız və yalnız bu xətt üzərindəki nöqtələrin koordinatları ödəyir.
Tərif 2. x və y dəyişənlərinə nəzərən iki dərəcəli tənliklə təyin olunan xətt (əyri) ikitərtibli xətt(əyri ) adlanır.
2. Düz xəttin bucaq əmsallı tənliyi.
y=kx+b (1)
Tənliyinə düz xəttin bucaq əmsallı tənliyi deyilir.
b=0 olduqda (1) tənliyi y=kx şəklinə düşür, y=kx isə koordinat başlanğıcından keçən və bucaq əmsalı k olan düz xəttin tənliyidir.
k=0 olduqda (1) tənliyi y=b şəklinə düşür , bu da absis oxuna paralel olan düz xəttin tənliyidir.
M0 (x0, y0) nöqtəsindən keçən və bucaq əmsalı k olan düz xəttin tənliyi
y - y0 = k (x-x0)
şəklindədir.
M1 (x1, y1) və M2 (x2, y2) nöqtələrindən keçən düz xəttin tənliyi
y− y1
y2− y1=
x−x1
x2−x1
olar.
3. Düz xəttin ümumi tənliyi.
Düz xəttin ümumi tənliyi Ax+By+C=0 (1) şəklindədir. Burada A,B və C əmsallarının qiymətlərindən
asılı olaraq həmin tənliyin təyin etdiyi düz xəttin verilmiş koordinat sisteminə görə necə yerləşdiyini tədqiq edək.
1 . A≠0 , B≠0 , C≠0 olsun . Onda (1) tənliyini
y=− A
Bx−C
B və ya y=kx+b (k=− A
B, b=−C
B ) (2)
olar. (2) tənliyi bucaq əmsalı k=− A
B və ordinat oxundan ayırdığı parçanın
qiyməti b=−C
B olan düz xəttin tənliyidir. 2. A=O, B≠O, C≠O olsun. Bu halda (1) tənliyini
y=−C
B, y=b ,(b=−C
B ) (3) şəklində yazmaq olar. (3) tənliyi absis oxuna paralel olan düz xəttin tən-liyidir.
3. A≠O, B=O, C≠O olduqda (1) tənliyini
x=−C
A, x=a (a=−C
A ) (4)
şəklində yazmaq olar, bu da ordinat oxuna paralel düz xəttin tənliyidir. 4. A≠0, B≠0 və C=0 olduqda (1) tənliyini
y=− A
Bx , y=kx (k=− A
B ) (5) şəklində yazmaq olar, buda koordinat başlanğıcından keçən düz xəttin
tənliyidir. 5. A≠0, B=0 və C=0 olduqda (1) tənliyini x=o (6) şəklində yazmaq olar bu da ordinat oxunun tənliyidir. 6. A=C=O və B≠O olduqda (1) tənliyi obsis oxunun y=o (7) tənliyinə çevrilir.
4. Düz xəttin polyar koordinatlarda tənliyi. Düz xəttin polyar koordinat sistemində tənliyini cıxarmaq üçün,müstəvi üzərində polyar koordinat sistemi və hər hansı L düz xəttini götürək. Polyusdan L düz xəttinə ON perpendikulyarı çəkib bu perpendikulyar üzərində O nöqtəsindən L düz xəttinə tərəf istiqamət
təyin edək.|O N|=Ρ və Ο Ν vektorunun OP oxu ilə əmələ gətirdiyi müsbət bucağı α ilə işarə edək.
L düz xətti üzərində ∀ M ( ρϕ) nöqtəsi götürsək onda
ΡrO n OM=|O N|=P və ΡrO nO M= ρcos (α−ϕ )
ifadələrinin sol tərəfləri bərabər olduğundan , alarıq.
ρ сos (α−ϕ )=p (1) (1) ifadəsi L düz xəttinin polyar koordinat sistemində tənliyi adlanır.
5. Düz xəttin parçalarla tənliyi.
Koordinat oxlarının hec birinə paralel olmayan koordinat başlanğıcından keçməyən L düz xətti götürək. Düz xəttin obsis və ordi-nat oxlarını kəsdiyi nöqtələr uyğun olaraq M(a,o) və N(o,b) olsun.L düz xəttinin tənliyini
Ax+By+C=0 (1)
şəklində yazsaq, şərtə görə A≠0, B≠0 və C≠0 olar. M(a,o) və N(o,b) nöqtələri L düz xətti üzərində yerləşdiyindən, onların koordinatları (1) tənliyini ödəyir. Aa+C=o, Bb+C=o Buradan ;
a=−C
A və b=−C
B (2)
(1) tənliyini Ax+By=- C şəklində yazaraq, bərabərliyin hər iki tərəfini (- C)-
yə bölsək
x
−CA
+ y
−CB
=1
və (2) bərabərliklərini nəzərə alsaq ;
xa+ y
b=1
(3)
olar. Bu tənliyə düz xəttin parçalarla tənliyi deyilir.
6. Düz xəttin normal tənliyi.
Müstəvi üzərində (0×y) koordinat sistemi və ∀ L düz xətti götürək. Koordinat başlanğıcını polyus və absis oxunu polyar ox hesab etsək , alınan polyar koordinat sistemində L düz xəttinin tənliyi
ρ cos(α-φ)=p (1)
olacaqdır. (1) tənliyinin sol tərəfini açsaq
ρ cosφ∙cosα+ρ sinφ∙sinα=p
və polyar koordinatlarla düzbucaqlı koordinatlar arasındakı x=ρcosφ və y=ρsinφ əlaqə düsturlarından istifadə etsək
xcosα+ysinα-p=0 (2)
tənliyini alarıq. Bu tənlik düz xəttin normal tənliyi və ya düz xəttin tənliyinin normal şəkli adlanır. P və α ədədlərinə normal tənliyin parametirləri deyilir.
7. Nöqtədə düz xəttə gədər olan məsafə.
Verilmiş Mo (xo, yo) nöqtəsindən Ax + By + C =0 (1) düz xəttə qədər olan məsafəni tapmaq üçün əvvəlcə düz xəttin (1) tənliyini normal şəklə salmaq , hər iki tərəfini μ ədədinə vururlar.
Aμx+Bμy+Cμ=0
Bu tənliyin normal tənlik olması üçün
Aμ=cos αBμ=sin αCμ=−p
olmalıdır. Birinci iki bərabərlikdən μ vuruğunu tapaq;
μ = 1
±±√A2+B2
μ ədədinə normallaşdırıcı vuruq deyilir. (1) tənliyini normal şəklə gətirdikdən sonra M0 (x0, y0 ) nöqtəsindən həmin düz xəttə qədər olan məsafə
d=|
Ax0+By0+C
√A2+B2|
düsturu ilə hesablanır.
Mövzu 7
İkitərtibli əyrilər.
1. Ellips (kanonik tənliyi).
2. Hiperbola (kanonik tənliyi).
3. Parabola (kanonik tənliyi).
1. Ellips (kanonik tənliyi).
Tərif. Müstəvi üzərində fokus adlanan verilmlş iki F1 və
F2 nöqtəsindən məsafələrinin cəmi sabit ədəd
olan nöqtələrin həndəsi yerinə ellips deyilir.
Ellipsin tənliyini çıxarmaq üçün müstəvi üzərində düzbucaqlı koordinat sistemi götürək və ellepsin fokuslarının absis oxu üzərində koordinat başlanğıcına nəzərən simmetrik yerləşdiyini fərz edək.
Onda ellips üzərində yerləşən ∀ M ( x , y ) nöqtəsi üçün ;
MF1+ MF2=2a (1)
Burada 2a ilə tərifdə göstərilən sabit ədəd işarə olunmuşdur.
F1F2=2c qəbul etsək , onda
2 a ¿ 2 c ,¿ F2 (−c ,o ) və F1 (c ,o ) olar. Bu halda iki nöqtə arasındakı məsafə düsturuna görə
F1 M=√ (x−c )2+ y2 və F2 M=√ ( x+c )2+ y2
(1) bərabərliyinə əsasən B2
√ ( x−c )2+ y2 + √ ( x+c )2+ y2
=2a (2) Bu ellipsin axtarılan tənliyidir. Ellipsin (2) tənliyini sadə şəklə gətirmək üçün onu radikallardan qurtardıqdan sonra
(a2−c2) x2+a2 y2=a2 (a2−c2 ) olar.Buradan
x2
a2+y2
a2−c2=1 (3)
a ¿ c¿ olduğundan a2−c2=b2 qəbul etmək olar. Onda (3) tənliyi
x2
a2+y2
b2=1 (4)
şəklində yazılar. (4) tənliyinə ellipsin kanonik tənliyi deyilir.
y
B1
b F2 F1 x A2 0 A1
a
B2
Elipsin forması a / b nisbətindən və ya ellipsin ekssentrisiteti adlanan
ε= ca=√a2−b2
a = √1−b2
a
adlanan kəmiyyətdən asılıdır. 0<c<a olduğundan 0<ε<1 olar. b = a olduqda (yəni ε=0) kanonik tənliyi
x2 + y2 = a2 (5)
kimi çevrə tənliyinə çevrilir, yəni ellips a radiuslu çevrəyə çevrilir.
Ellipsın fokuslarını yerləşdiyi simmetriyaya oxuna onun fokal oxu deyilir. Kanonik tənliyi üçün fokal ox absis oxudur.
Ellipsin fokal oxuna perpendikulyar olan x = −aε və x = a
ε düzxətləri
onun direktrisləri adlanır. 0<ε<1 olduqundan aε>a olar. Deməli, ellipsin
ditektrislərinin biri A1 təpəsinin sağında, obiri isə A2 təpəsinin solundan keçir və ellipsı kəsmillər.
2. Hiperbola (kanonik tənliyi).
Tərif. Fokus adlanan verilmiş iki F1 və F2 nöqtəsindən məsafələrinin fərqi mütləq qiymətcə sabit kəmiyyət olan nöqtələrin həndəsi yerinə hiperbola deyilir.
y
r2 M r1
F2 A2 0 A1 F1 x
Hiperbolanın tənliyini çıxarmaq üçün yenədə tərifdə göstərilən müsbət sabiti 2a , fokuslar arasındakı məsafəni 2c və fokusların absis oxu üzərində koordinat başlanğıcına nəzərən simmetrik yerləşdiyini qəbul edək. Onda tərifə görə F1( c; o), F2( -c; o) və M( x,y) nöqtələri üçün
|MF1−MF2|=2 a və ya MF1−MF2=±2a buradan
√ x−c2+ y2 √ x+c2+ y2=± 2a (1)
tənliyi hiperbolanın axtarılan tənliyidir. Bu tənliyi ellipsin tənliyi kimi sadələşdirsək, yenə də
x2
a2+y2
a2−c2=1 (2)
münasibətini alarıq. Bu halda a ¿¿olduğundan a2−c2=−b2 qəbul edərək (2) tən-liyini
x2
a2−y2
b2=1 (3)
şəklində yazmaq olar. (3) tənliyinə hiperbolanın kanonik tənliyi deyilir.
Hiperbolanın simmetriya oxlarının kəsişmə nöqtəsinə onun mərkəzi deyilir.
A1A2 və B1B2 parçaları hiperbolanın uyğun olaraq həqiqi və xəyali oxları adlanır. Hiperbolanın həqiqi oxunun uzunluğu 2a xəyali oxunun uzunluğu isə 2b-yə bərabərdir. a və b ədədləri hiperbolanın uyğun olaraq həqiqi və xəyali yarımoxları adlanırlar.
Hiperbolanın forması ba nisbətindən və ya onun ekssentrisiteti adlanan
ε= ca=√a2+b2
a = √1+b2
a
kəmiyyətindən asılıdır. c>a olduqundan, ε>1 alınır. a = b olduqda hiperbolanın tənliyi
x2 – y2 = a2 (4)
şəklində yazılır. Bu halda hiperbolaya bərabərtərəfli hiperbola deyilir.
Fokusların yerləşdiyi oxa hiperbolanın fokal oxu deyilir. Tənlikləri x = −aε
və x = aε olan düzxətlər fokal oxa perpendikulyar olur hiperbolanın təpələri
ilə koordinat başlanğıcı arasından keçir. Bu xətlərə hiperbolanın direktrisləri deyilir.
Tənlikləri uyğun olaraq
x2
a2−y2
b2=1 və −x2
a2 +y2
b2=1
olan hiperbolar qoşma hiperbolar adlanırlar.
3. Parabola (kanonik tənliyi).
Tərif. Fokus adlanan verilmiş F nöqtəsindən və direktris adlanan verilmiş d düz xəttindən eyni uzaqlıqda olan nöqtələrin həndəsi yerinə parabola deyilir.
Parabolanın tənliyini çıxarmaq üçün F fokusunun absis oxu üzərində yerləşdiyini və d direktrisinin həmin oxa ¿ olduğunu qəbul edək. Fokusla direktris arasındakı məsafə FD=p olsun . Fərz edək ki, koordinat başlanğıcı FD parçasının orta nöq-təsində yerləşir. Onda
F ( p
2, 0) , D(− p
2, 0)
və parabolanın ∀ M (x,y) nöqtəsi üçün ;
MF=MN
√(x− p2 )
2+ y2=√(x+ p
2 )2
Buradan
x2−xp+( p
2 )2+ y2=x2+xp+( p
2 )2
və yaxud y
2=2 px (1) P kəmiyyəti parabolanın parametri adlanır. Parabola əyrisi absis oxuna
nəzərən simmetrikdir. Parabola əyrisinin 1 simmetriya oxu varsır. O nöqtəsi
onun təpə nöqtəsi, OX oxu isə onun fakal oxu adlanır.
Bir parabolası ilə ordinat oxuna nəzərən simmetrik olan parabola
y2 = -2px
tənliyi ilə təyin olunar.
(1) tənliyinə parabolanın kanonik tənliyi deyilir. y
N M(x, y)
P
D 0 F x
Mövzu 8
Fəzada düz xətt və müstəvi tənlikləri.
1. Fəzada iki düz xəttin qarşılıqlı vəziyyəti.
2. Fəzada düz xətt və müstəvinin qarşılıqlı vəziyyəti.
3. Səthin fəzada tənliyi ( silindrik və fırlanma səthləri).
1. Fəzada iki düz xəttin qarşılıqlı vəziyyəti.
Müstəvinin normal tənliyi. Tutaq ki, müstəvidə veriilmiş M nöqtəsinə gədər koordinat başlanğıcından olan p məzafəsində r radius vektoru çəkilmiçdir. Bundan əlavə həmin O nöqtəsindən müstəviyə doğru n0 perpendikulyar endirilmişdir. Bu şərtlərdə r radius vektorunun proyeksiyaları və n0 perpendikulyarın yönəldici kosinuslarından istifadə etsək, müstəvi üçün
x cosα+ y cosβ+zcosγ−p=0 (1)
normal tənliyi alırıq.
Müstəvinin
Ax + By + Cz + D = 0 (2)
Ümümi tənliyini normal tənliyə gətirmək üçün onu normallayıcı
M=± 1√A2+B2+C2 (3)
Vuruğa vurmaq lazımdır.
Misal 1. Müstəvinin x−2 y+2 z−3=0 ümumi tənliyini normal şəklə gətirin.
1-ci addım. Normallayıcı vuruğu hesablayaq:
M=± 1
√12+(−2)2+22=1
3 .
2-ci addım. M qiymətini verilmiş tənliyin hər iki tərəfinə vuraraq alırıx:
13
x−23
y+ 23
z−1=0.
3-cü addım. Yönəldici kosinusları isə və p qiymətini aşağıdakı düsturlara görə alırıq:
cosα=± A√A2+B2+C 2 = 1
3 ; cosβ=± B√A2+B2+C2 =
−23 ;
cosγ=± C√A2+B2+C2
=23 ; p=± D
√A2+B2+C2=1.
İki müstəvinin arasındakı bucaq. Tutaq ki, iki
A1x + B1y + C1z + D1 = 0
A2x + B2y + C2z + D2 = 0 (4)
müstəvi verilir. Iki müstəvinin əmələ gətirdiyi iki qonşu ikiüzlü bucaqdan istənilən birinə həmin iki müstəvi arasındakı bucaq deyilir və
şəklində yaza bilərik. Burada (x, y, z) cari nöqtənin koordinatlarıdır,
cosα=M , cosβ=N ,cosγ=P
M nöqtəsinin S vektorunun koordinatlarıdır.
İki düzxətt arasındakı bucaq. Tutaq ki, tənlikləri
x−a1
m1=
y−b1
n1=
z−c1
p1və
x−a2
m2=
y−b2
n2=
z−c2
p2
Olan iki müstəvi verilmişdir və onlar kəsişərək φ bucaqını təçkil edirlər. Həmin bucağı
cosφ=m1m2+n1 n2+ p1 p2
√m12+n1
2+ p12√m2
2+n22+ p2
2 (7)
Düsturuna əsasən hesablayırıq. Burada (m1, n1, p1) və (m2, n2, p2) müstəvilərin yönəldici vektorlarıdır.
Misal 2. x−11= y−4= z+3
1 və x2= y+2−2
= z−1 düz xətləri arasındakı bucağı tapın.
Birinci düzxətt üçün yönəldici əmsallar m1=1, n1=-4, p1=1, ikinci üçün isə m2=2, n2=-2, p2=-1 olur, ona görə
cosφ=± 1·2+8−1
√12+(−4)2+12√22+(−2)2+(−1)2=± 1√2 .
Buradan φ=π4 və ya φ=3 π
4 alınır.
İki düz xəttin paralellik və perpendikulyarlıq şərtləri. Düz xətlərin perpendikulyar olması halında cosα=0 olur və (7) düsturdan axtarılan şərti alırıq.
m1 m2+n1 n2+ p1 p2= 0 (8)
bu perpendikulyarlıq şərtidir.
Düz xəttin istiqaməti. m : n: p nisbətləri ilə müəyyən olduğu halda iki düz xəttin paralellik şərti
m1
m2=
n1
n2=
p1
p2 . (9)
2. Fəzada düz xətt və müstəvinin qarşılıqlı vəziyyəti.
Düz xətlə müstəvi arasındakı bucaq. Tutaq ki, düz xəttin tənlikləri
x−am= y−b
n= z−c
p ,
müstəvinin tənliyi isə
Ax + By + Cz + D = 0-dir
Müstəviyə perpendikulyarın A, B, C proyeksiyalarına və verilən düz xəttin m, n, p yönəldici əmsallarına görə bucağın kosinusunu aşaığıdakı düstura görə tapmaq mümkündür.
cos ( π2−φ)=sinφ= |Am+Bn+Cp|
√A2+B2+C2√m2+n2+ p2 (1)
Düz xətlə müstəvinin paralellik və perpendikulyarlıq şərtləri.
x−am= y−b
n= z−c
p ,
düz xətti ilə
Ax + By + Cz + D = 0
Müstəvinin paralel olması halında bunların arasındakı bucaq sıfra bərabər olur; buna görə də, sinφ=0 və (1) düsturu axtarılan şərti verir:
Am+Bn+Cp = 0 (2)
3. Səthin fəzada tənliyi ( silindrik və fırlanma səthləri).
Tərif. x y, z dəyişənlərinə nəzərən ikidərəcəli tənliklə təyin olunan səthə ikitərtibli səth deyilir.
münasibətlərinin ödənilməsi zəruri və kafi şərtdir.
Tərif 2. Əgər α (x) və β (x) funksiyaları x a şərtində sonsuz kiçilən
funksiyalardırsa və
α (x) = β (x) + o (β (x) ) (8)
göstərilişi doğrudursa, onda β (x) sonsuz kiçiləninə α (x) sonsuz kiçiləninin baş
hissəsi deyilir.
Mövzu 10
Funksiyanın limiti və kəsilməzliyi haqqında teoremlər.
1. Funksiyanın limiti
2. Limitlər haqqında əsas teoremlər.
3. Məşhur limitlər.
4. Funksiyanın kəsilməzliyi.
1. Funksiyanın limiti
Tərif 1. X çöxluğunun a-ya yığılan istənilən xn (xn≠a , n=1,2 , .. . ) nöqtələri
ardıcılığına ƒ(x) funksiyasının uyğun olan f (xn ) qiymətləri ardıcıllığının
hamısı eyni bir A ədədinə yığıldıqda , həmin A ədədinə x→a şərtində f ( x )
funksiyasının limiti deyilir.
Aydındır ki, a-ya yığılan heç olmazsa iki xn' xn
' ' ardıcıllığına f ( x )
funksiyasının f ( xn' ) və f ( xn
' ' ) uyğun qiymətləri ardıcıllıqları müxtəlif
limitlərə yığılarsa, onda f ( x ) funksiyasının x=a nöqtəsində limiti yoxdur.
Funksiyanın nöqtədə limitinin başqa tərifi də vardır.
Tərif 2. Tutaq ki, sonlu a və A ədədləri və istənilən ε ¿0¿ədədi üçün elə δ ¿0¿
ədədi varki, x-in X çoxluğundan götürülmüş və 0¿¿ (1) bərabərsizliyini
ödəyən bütün qiymətlərində |f (x )−A|¿¿ (2) münasibəti ödənilir.Onda
A ədədinə x→a şərtində f ( x ) funksiyasının limiti deyilir.
Qeyid edək ki, A ədədi x→a şərtində f ( x ) funksiyasının limiti olduqda (2)
bərabərsizliyinin x=a qiymətində ödənilib ödənilməməsinin heç bir əhəmiyyəti
yoxdur. f ( x ) funksiyası x=a nöqtəsində təyin olunduqda isə onun həmin
nöqtədə limiti xüsusi f (a ) qiymətinə bərabər olada bilər, olmayada bilər.
Funksiya limitinin birinci tərifinə “ limitin ardıcıllıq dilində tərifi ” (və ya
Heyns mənada tərifi) , ikinci tərifinə isə
“ limitin ε , δ dilində tərifi ”(və ya Koşi mənada tərifi ) deyilir.
2. Limitlər haqqında əsas teoremlər.
Teorem 1 . Sonlu limitləri olan sonlu sayda f k ( x ) ( k=1,2 , .. .. n . ) funksiyalarının
cəminin limiti onların limitləri cəminə bərabərdir. (1)
Teorem 2 . Sonlu limitləri olan sonlu sayda f k ( x ) ( k=1,2 , .. .. n . ) funksiyalarının
hasilinin limiti onların limitləri hasilinə bərabərdir. (2)
lim
x→ xo
∑k=1
n
f k (x ) =∑k=1
n limx→x 0
f k ( x ) (1)
lim
x→ x0
∏k=1
n
f k ( x )=∏k=1
n limx→ x0
f k ( x ) (2)
Sabit vuruğu limit işarəsi xaricinə çıxarmaq olar.
limx→ x0
[c f (x ) ]=c⋅[lim f ( x )x→ x0
]
Teorem 3.f(x) və ϕ (x) funksiyalarının sonlu limitləri varsa və lim
x→ x0
ϕ ( x )≠0
olarsa, onların nisbətinin limiti limitlərinin nisbətinə bərabərdir;
limx→ x0
f ( x )ϕ ( x )
=
limx→0
f ( x )0
limx→0
ϕ (x )
3. Məşhur limitlər.
1. lim
x→ 0
sin xx=1
2. lim
x→∞(1+ 1
x )x=e
ədədi.
Tərif . (1+1n )
n
dəyişən kəmiyyətinin n→∞ şərtində limitinə e ədədi deyilir.
e =lim
n→∞(1+ 1
n )n
ədədi bərabərsizliyini ödəyir.
e ədədi 2≤e≤3
e ≈2,7182818284
4. Funksiyanın kəsilməzliyi.
Nöqtədə funksiyanın kəsilməzliyi.
Tərif 1. Tutaq ki, istənilən ε ¿0¿ ədədi üçün elə δ ¿ 0¿ ədədi var ki, x-in |x−x0| ¿¿ bərabərsizliyini ödəyən bütün qiymətlərində |f ( x )−f ( xo )| ¿¿
bərabərsizliyi ödənilir. Bu halda f ( x ) funksiyasına x=xo nöqtəsində kəsilməyən
funksiya deyilir.
Parçada kəsilməz funksiyanın bəzi xassələri.
Xassə1. (Veyerştrasın birinci teoremi) Sonlu [a , b ] parçasında kəsilməyən f ( x ) funksiyası həmin parçada məhduddur.
Xassə 2. (Veyerştrasın ikinci teoremi) Sonlu [a ,b ] parçasında kəsilməyən f ( x ) funksiyası bu parçanın heç olmasa bir α nöqtəsində özünün həmin
parçadakı dəqiq aşağı sərhəddini, heç olmasa bir β nöqtəsində isə dəqiq yuxarı
sərhəddini alır, yəni
f (a )= inf
x∈ [a ,b ]f ( x )=m0 , f ( β )= sup
x ∈ [a ,b ]f ( x )=M 0
(1)
Xassə 3. [a ,b ] parçasında kəsilməyən y=f ( x ) funksiyası həmin parçanın uc
nöqtələrində müxtəlif işarəli qiymətlər alırsa, onda a və b nöqtələri arasında
yerləşən ən azı bir C(a¿¿ c ¿¿b ) nöqtəsi var ki, bu nöqtədə f ( x ) funksiyası
sıfıra çevrilir; f (c )=0
Xassə 4. [a , b ] parçasında kəsilməyən y=f ( x ) funksiyası həmin parcanın uc
nöqtələrində bərabər olmayan A=f ( a)≠B=f (b) qiymətlərini alırsa, onda həmin
A və B ədədləri arasında yerləşən hər bir c ədədi üçün [a , b ] parçasında
yerləşən ən azı bir ξ nöqtəsi var ki, f (ξ )=c olar.
Xassə 5. Məhdud və qapalı X çoxluğunda kəsilməyən f ( x ) funksiyasının f (X ) qiymətləri çoxluğu məhdud və qapalı çoxluqdur, yəni məhdud və qapalı X
çoxluğunda kəsilməyən f ( x ) funksiyası həmin çoxluğu məhdud və qapalı
f (X ) çoxluğuna inikas etdirir.
Tərs funksiyanın kəsilməzliyi.
Teorem . [a , b ] parçasında təyin olunmuş kəsilməyən və artan (ya da azalan) y=f ( x ) funksiyasının tərs funksiyası olan x=φ(y) funksiyası
[c , d ] (c=f (a ) , d=f (b )) parçasında kəsilməyəndir .
Kantor teoreminin söylənilməsi və izah edilməsi.
Teorem . Parçada kəsilməyən funksiya həmin parçada müntəzəm
kəsilməyəndir.
Deməli funksiyanın parçada kəsilməzliyi anlayışı ilə parçada müntəzəm
kəsilməzliyi anlayışı eynidir. Lakin bu xassə interval və yarıminterval üçün
doğru deyildir.
Məsələn; f ( x )= 1
x funksiyası (0,1) intervalında kəsilməyəndir, lakin həmin
intervalında müntəzəm kəsilməyən deyildir.
Teorem 2. Əgər α (x) α 1(x) (x a), β (x) β1(x) (x a) və α1(x )β1(x )
= A (x a)
olarsa, onda
α ( x)β( x) A (x a).
Doğrudan da, x a olduqda
limx→ a
α (x)β (x) = log x →a
α (x)α1(x )
·α 1(x)β1(x)
·β1(x)β (x) = 1 · A · 1 = A.
Bu teorem göstərir ki, iki funksiya nisbətinin limitini hesabladıqda, onları
uyğun olaraq ekvivalent funksiyalarla əvəz etsək limitin qiyməti dəyişməz.
Mövzu 11
Törəmənin tərifi və tapılma qaydası.
1. Funksiyanın törəməsi.
2. Törəmənin həndəsi və mexaniki mənası.
3. Elemantar funksiyaların törəməıəri.
1. Funksiyanın törəməsi.
Tərif 1. Əgər Δx→0 şərtində ΔyΔx=
f ( x+Δx )−f ( x )Δx (1) nisbətinin sonlu
limiti varsa, onda həmin limitə y=f(x) funksiyasının x nöqtəsində törəməsi
deyilir.
lim
Δx→ 0
f ( x+Δx )−f ( x )Δx
=f ' ( x )= y '=df (x )
dx
Verilmiş x nöqtəsində törəməsi olan funksiyaya həmin nöqtədə diferensiallanan
funksiya deyilir. (a, b) intervalının hər bir nöqtəsində törəməsi olan funksiya
həmin intervalda diferensiallanan funksiya adlanır.
Funksiyanın törəməsini tapmaq əməlinə həmin funksiyanın diferensiallanması
deyilir.
Misal 1. f(x) =x funksiyanın törəməsi vahidə bərabərdir.
Bunu isbat etmək üçün arqumentin verilmiş Δx artımına funksiyanın uyğun
artımını tapaq;
f ( x+Δx )−f ( x )= (x+Δx )−x=Δx
Buradan;
f ( x+Δx )− f ( x )Δx
=ΔxΔx=1
f ' ( x )=limΔx→0
f ( x+Δx )−f ( x )Δx
=limΔx→ 0
1=1
2. Törəmənin həndəsi və mexaniki mənası.
Törəmənin həndəsi mənasının tərifi. İxtiyari L əyrisi və onun üzərində M0
nöqtəsində götürək. L əyrisinin ixtiyari M və M0 nöqtəsindən bir kəsən çəkək. M
nöqtəsi L əyrisi boyunca öz yerini dəyişdikdə M0M kəsəni də ümümiyyətlə M0
nöqtəsi ətrafında öz vəziyyətini dəyişər və nəticədə M0 nöqtəsinə yaxınlaşdıqda
M0M kəsəni müəyyən M0T limit vəziyyətinə yaxınlaşarsa, kəsənin həmin limit
vəziyyətinə M0 nöqtəsində L əyrisinə toxunan deyilir.
Deməli törəmənin həndəsi mənası belədir: y=f(x) funksiyasının x0 nöqtəsində
f ꞌ(x0) funksiyanın qrafiki olan əyriyə M0 (x0 , f (x0)) nöqtəsində çəkilmiş bucaq
əmsalına bərabərdir:
k = tg α= f ꞌ ( x0) (1)
İndi isə həmin L əyrisinə M0 nöqtəsində çəkilmiş M0T toxunanın tənliyini
yazaq. Məlumdur ki verilmiş nöqtədən keçən və bucaq əmsalı k ¿ f ꞌ (x0) olan M0T
düzxəttinin tənliyi
y− f (x¿¿0)= f ꞌ (x0)(x−x0)¿ (2)
şəklində yazılır. y0=f (x¿¿0)¿ olduğundan toxunanın tənliyini
y− y0=f ꞌ (x0 ) ( x−x0 ). (3)
L əyrisinə M0 nöqtəsində çəkilmiş toxunana həmin nöqtədə perpendikulyar
olan düzxəttə əyrinin normalı deyilir. Həmin normalın tənliyi
y− y0=−1
f ꞌ (x0 )(x−x0 ) (4)
şəklində yazılar.
Törəmənin mexaniki mənasının tərifi. Hər hansı cismin dəyişənsürətli
düzxətli hərəkətinə baxsaq, həmin cismin ülçülərini və şəklini nəzərə almayaraq,
onun fiziki baximindan maddi nöqtə hesab etmək olar. məlumdur ki, hərəkət
edən nöqtənin getdiyi yolu zamandan asılıdır: s = s(t) nöqtənin t zaman əslində
getdiyi yol s(t), t+∆t zamanında isə getdiyi yol s(t+∆t) = s(t) + ∆s olarsa, onda
baxılan nöqtə ∆t zamanı ərzində ∆s məsafəni getmiş olar. Belə olan halda
vor = ∆ s∆ t=
s ( t+∆ t )−s( t)∆ t (5)
nisbəti nöqtənin hərəkətinin orta sürətinə bərabər olar. Həmin nisbətdə ∆ t →0
şərtində limitə keçsək nəticədə alırıq ki,
v(t) = sꞌ(t) (7)
Buradan törəmənin mexaniki mənası alınlır: hərəkət edən nöqtənin sürəti gedilən
məsafənin zamana görə törəməsinə bərabərdir.
Törəmənin iqtisadi mənası. Təbiətdə baş verən istənilən prosesləri
öyrənərlən bir-biri ilə bağlı olan kəmiyyətlər arasındakı deyişmə sürətini
törəmənin köməyi ilə qiymətləndirmək olar. buna əsasən, törəmə iqtisadiyyatda
geniş tətbiq olunur.
Misal. Tutaq ki, eyni adlı məhsulların istehsal xərcləri – u, məhsulun miqdarı –
x olsun. Onda, xərcləri miqdarın u = u(x) funksiyası kimi gəbul edə bilərik.
Aydındır ki, məhsulun miqdarı ∆x gədər artsa, ona xərclənən qiymət ∆u gədər
artar. Belə olan halda ∆ u∆ x - istehsal xərcinin orta artımı olar. Onda orta artımın
limiti istehsal xərclərinin limiti adlanır və u ꞌ(x) ilə işarə olunur:
lim∆ x→ 0
∆ u(x )dx
=u ꞌ x (8)
3. Elemantar funksiyaların törəməıəri.
Mövzu 12
Mürəkkəb, tərs funksiyaların törəməsi.
1. Mürəkkəb funksiyanın törəməsi.
2. Tərs funksiyanın törəməsi.
3 Parametrik və qeyri-aşkar funksiyaların törəməsi.
1. Mürəkkəb funksiyanın törəməsi.
Teorem. x=ϕ ( t ) funksiyası t0 nöqtəsində və y= f ( x ) funksiyası uyğun x0=ϕ (t0)
nöqtəsində diferensiallanan olduqda y=f [ϕ ( t ) ] mürəkkəb funksiyası t0
nöqtəsində diferensiallanandır və onun törəməsi
(f [ϕ ( t0 )] )′= f ' ( x0)⋅ϕ' (t0 )
düsturu ilə hesablanır.
İsbatı. Sərbəst dəyişənin müəyyən bir x qiymətində u = φ(x) və y = F(u) və
onun x + ∆x qiymətində isə
u + ∆u = φ(x + ∆x), y + ∆y = F(u + ∆u)
olar. Beləliklə, ∆x artıma ∆u, ∆F-ə isə ∆y artımı uyğundur; bundan başqa ∆x
şərtində, ∆u olduqda isə ∆y .
Şərtə görə, törəməsi vardır:
.
Funksiya limitinin xassəsinə görə, bu münasibətdən
(1)
alınır. Burada şərtinə görə (1) bərabərliyini
(2)
şəklində yazmaq olar. Bu bərabərliyinin hər tərəfini ∆x atrımına bölək:
. (3)
Şərtə əsasən
, . (4)
Üçüncü bərabərliyində şəklində limitə keçərək:
. (5)
2. Tərs funksiyanın törəməsi.
Teorem. y=f ( x ) funksiyası x=x0 nöqtəsində diferensiallanandırsa və f' (x0 )≠0
olarsa onda onun tərs funksiyası x=ϕ (t ) uyğun y0 nöqtəsində ( y0=f (x0 ))
diferensiallanandır və onun törəməsi
ϕ ' ( y0)=
1f ' (x0) (1)
düsturu ilə hesablanır.
İsbatı. Əvvəlcə qeyd edək ki, tərs funksiyanın tərifinə əsasən:
.
Onda tərs funksiya üçün:
bərabərliyini yazmaq olar.
Tərs funksiya kəsilməz olduğundan şərtində olur. Buna görə
də:
(2)
Bu düsuru
(3)
şəklindədə yazmaq olar.
3 Parametrik və qeyri-aşkar funksiyaların törəməsi.
Parametrik şəklində verilmiş funksiyanın törəməsi.
Teorem. Əgər x=ϕ ( t ) və y=Ψ ( t ) funksiyalarının törəmələri varsa və ϕ ' (t )≠0
olarsa onda y=f ( x ) funksiyası diferensiallanandır və onun törəməsi
y
x′=Ψ ' (t )ϕ ' (t ) və ya
yk ′=
yt ′
xt ′ (1)
düsturu ilə hesablanır.
İsbatı. Həqiqətən də y = ᴪ(t) bərabərliyini x nəzərən diferensiallasaq və sağ
tərəfi x-ın mürəkkəb funksiyası hesab etsək alarıq:
(2)
kəmiyyətini tərs funksiyanın diferensiallanması qaydasına əsasən x = φ(t) funksiyasından tapmaq olar:
. (3)
Tapdığımız qiyməti (2) bərabərliyinə terinə yazsaq tələb olunan
düsturunu alırıq.
Qeyri-aşkar funksiyanın törəməsi.
Tutaq ki, y = y(x) qeyri-aşkar funksiyası
F(x , y) = 0 (1)
tənliyi vasitəsi ilə verilmişdir. Bu funksiyanın analitik ifadəsini aşkar şəkildə
tapmadan onun müxtəlif tərtibli törəmələrini tapmaq bəzən mümkün olur. Bu
məqsədlə (1) bərabərliyinin hər iki tərəfini x-ə görə diferensiallayırlar və y
dəyişəni x dəyişəninin funksiyası olduğunu nəzərə alırıar. Alınan bərabərliyini yꞌ
törəməyə nəzərən həll edərək yꞌ törəməsini tapırlar.
Bu prosesi dəvam etdirməklə funksiyanın iki, üç və s. tərtibli törəmələrini
tapmaq olar.
Misal.
ax2 + by2 = 2 (2)
tənliyi ilə təyin olunan y = y(x) funksiyasının birinci törəməsini tapın.
Qaydaya uyğun olaraq tənliyin hər iki tərəfini x dəyişəninə nəzərən törəməsini
alaq (unutmuruq ki, y dəyişən x-ın funksiyasıdır):
2ax + 2by · y ꞌ = 0, (3)
y ꞌ = (4)
Birdəyişənli funksiyanın diferensial hesabı.
Mövzu 13
Diferensial hesabının əsas teoremləri.
1. Roll, Lagranj, və Koşi teoremləri.
2. Qeyri-müəyyənliklərin açılışı, Lopital qaydası.
3. Teylor düsturu.
1. Roll, Lagranj, və Koşi teoremləri.
Roll teoremi. [a ,b ]-da kəsilməyən , (a,b) intervalında diferensiallanan və
həmin parçanın uc nöqtələrində bərabər f (a )= f (b ) qiymətləri alan y= f ( x )
funksiyası üçün həmin (a, b) intervalında yerləşən heç olmasa bir elə ξ nöqtəsi
var ki, bu nöqtədə funksiyanın f ' ( x ) törəməsi sıfıra bərabərdir. Yəni f ' (ξ )=0
Laqranj teoremi. [a , b ]-da kəsilməyən və (a,b) intervalında diferensiallanan
y=f ( x ) funksiyası üçün həmin intervalında yerləşən elə ξ nöqtəsi var ki, bu
nöqtədə
f (b )−f (a )= (b−a ) f ' (ξ ) (1)
bərabərliyi ödənilir. (1) bərabərliyinə Laqranj düsturu və ya sonlu artımlar
onda x1 nöqtəsində funksiyanın maksimumu vardır. Əgər həmin x1 nöqtəsindən
soldan sağa keşəndə törəmənin işarəsi mənfidən müsbətə dəyişirsə, onda həmin
nöqtədə funksiyanın minimumu vardir.
Beləliklə,
a) əgər x<x1 olduqda f ꞌ (x1 )>0 , x>x1 olduqda isə f ꞌ (x1 )<0 olarsa, onda x1
nöqtəsində funksiyanın maksimumu var;
b) əgər x<x1 olduqda f ꞌ (x1 )<0, x>x1 olduqda isə f ꞌ (x1 )>0 olarsa, onda x1
nöqtəsində funksiyanın minimumu var. Bu halda nəzərə almaq lazımdır ki, a) və
ya b) şərti x arqumentinin x1 ədədinə yalnız kifayət qədər yaxın olan
qiymətlərində, yəni böhran nöqtəsinin kifayət qədər kiçik ətrafının bütün
nöqtələrində ödənilməlidir.
Teorem 3. (ekstremum varlığının ikinci kafi şərtdi). Tutaq ki, f ꞌ (x1 )=0, onda f ꞌꞌ (x1 )<0 olaesa, funksiyanın x1 nöqtəsində maksimumu, f ꞌꞌ (x1 )>0 olduqda isə həmin
nöqtədə minimumu var.
3. Əyrinin qabarıq və çöküklüyu. Əyilmə nöqtəsi.
Müstəvi üzərində birqiymətli diferensiallanan f (x) funksiyasının qrafiki olan
y = f (x) əyrisinin nəzərdən keçirək.
Tərif 1. Əyrinin (a, b) intervalına daxil olan bütün nöqtələri bu intervalda
əyriyə çəkilən istənilən toxunandan açağıda yerləşərsə, deyirlər ki, (a, b)
1. Nizamlı ədədlər cütlüyü və onlar üzərində əməllər.
2. Kompleks ədəd anlayışı. Kompleks ədədin cəbri forması.
3. Kompleks ədədlər. Onlar üzərində əməllər.
4. Kompleks ədədin triqonometrik forması.
5. Muavr düsturu. Eyler düsturu.
1. Nizamlı ədədlər cütlüyü və onlar üzərində əməllər.
Həqiqi a və b ədədlərinin hansının birinci hansının ikinci olduğunu göstərən
(a, b) cütlüyü nizamlanmış adlanır. Məsələn, (0,1), (2,3), (3,2). Qeyd edək ki,
eyni rəqəmlərdən təşkil olunmalarına baxmayaraq axırıncı iki cütlük
müxtəlifdirlər.
Hər bir cütlüyü bir hərflə işarə edərək onların bərabərliyi anlayışını, onlar
üzərində əməlləri verək. İki nizamlı cütə baxaq.
α=(a , b ) , β=(c , d ) (1)
Əgər a = c və b = d olarsa bu cütlər bərabər adlanır.
(a , b )=(c ,d )Û ( a=c , b=d ) (2)
(1)-dəki nizamlı cütlərin cəmi
α+β=( a , b)+(c ,d )=( a+c ,b+d ) (3)
hasili isə
α⋅β=(a ,b)⋅(c ,d )=(ac−bd ,bc+ad ) (4)
(3)-dən aydındır ki,
0=(0 , 0 ) (5)
istənilən cütlə cəmi əvvəlki cütə bərabərdir.
(a , b )+( 0 , 0)=(a , b )
(5) sıfır cütlük adlanır və nizamlı cütlər üçün sıfır rolu oynayır.
Tərif. α−β fərqi elə nizamlı z=( x , y ) cütünə deyilir ki, z+β=α olsun.
α−β=(a , b )−(c , d )=(a−c , b−d ) (6)
Tərif. Əgər β≠0 isə və c2+d2≠0 isə αβ nisbəti
αβ=( ac+bd
c2+d2 , bc−adc2+d2 ) (7)
formulu ilə təyin olunur. Bu formuldan aydındır ki, əgər α=β isə yəni a=c , b=d isə, onda
1=( c2+d2
c2+d2 , dc−cdc2+d2 ) , 1=(1 ; 0 )
deməli vahid rolunu
1=(1; 0) (8)
nizamlı cütü oynayır.
a = (a, 0) və b = (b, 0) (9)
nizamlı cütlərinə baxaq. (9) şəkilli nizamlı cütlər üzərində hesab əməlləri həqiqi ədədlər üzərində olduğu kimi aparılır. Həqiqi ədədlər (9) cütləri şəklində verilir.
2. Kompleks ədəd anlayışı. Kompleks ədədin cəbri forması.
a və b həqiqi ədədlərindən təşkil olunmuş nizamlı (a, b) cütlüyü kompleks ədəd adlanır.
i = (0, 1) (10)
nizamlı cütünə baxaq. (4)-ü tətbiq etsək alarıq,
i2=i⋅i=(0 , 1 )⋅(0 , 1 )=(0−1 , 0+0 )=(−1 ; 0 ). (−1, 0)=−1 olduğu üçün
i2=−1 , i=√−1 (11)
(11)-i ödəyən (10) nizamlı cütlüyü xəyali vahid adlanır. Xəyali vahidin köməyilə istənilən α=(a ,b) kompleks ədədi, yəni nizamlı həqiqi ədədlər cütlərini göstərmək olar.
bi=(b ,0)⋅(0,1)=(0 , b ), onda (a ,b )=(a ,0)+(0 , b)=a+bi yəni
(a ,b )=a+bi (12)
(a , b )=a+bi , (a , b )=(0 , b )+(a , 0)=bi+a , a+bi=bi+a.
Deməli, (12)-də toplananları yerini dəyişmək olar. a+bi – kompleks ədədin cəbri forması adlanır. a – həqiqi hissə, b – xəyali hissə, a=Re α ; b=Иm α .
Tərif. Əgər b = 0 olarsa (a , 0 )=a – həqiqi ədəd a = 0, (0 , b )=bi , bi – təmiz xəyali ədəd adlanır. a+bi , c+di kompleks ədədləri yalnız a = c, b = d olduqda bərabər hesab edilir.
(a+bi=c+di)⇔( a=c , b=d )(a+bi=0 )⇔(a=0 , b=0)
α=a+bi isə a−bi -nın qoşması adlanır və -lə işarə olunur. α=a−bi i=√−1 . i simvolunu 1777-ci ildə Eyler daxil etmişdir.
Yerdəyişmə, quruplaşdırma və paylama qanunları doğrudur.
4) Bölünməsi:
z1 = a1+ib1, z2 = a2+ib2, |z2|=√a22+b2
2 ≠ 0.
Onda
a1+ib1
a2+ib2=(a1+ ib1)(a2−ib 2 )(a2+ ib2 )(a2−иb2 )
=(a1 a2+b1b2 )+i (a2b1−a1b2 )
a22+b2
2 =
¿a1 a2+b1b2
a22+b2
2 +iα2b1−a1 b2
a22+b2
2 .
4. Kompleks ədədin triqonometrik forması.
Hər bir z=a+ib kompleks ədədini Oxy müstəvisində koordinatları a, b olan A( a , b) nöqtəsi kimi göstərmək olar. Tərsinə, müstəvidə hər bir M ( x , y ) nöqtəsinə z=x+iy kompleks ədədi uyğundur. Kompleks ədədlər təsvir edilmiş müstəvi z
dəyişəni kompleks müstəvi adlanır.
Kompleks müstəvi üzərində absis oxuna həqiqi ox, ordinat oxuna isə xəyali ox
deyilir.
Ox oxu üzərində yerləşən nöqtə (b = 0) həqiqi ədəd oy oxu üzərindəki nöqtə isə
sırf xəyali ədədi göstərir. A(a, b) nöqtəsini koordiqnat başlanğıcı ilə birləşdirsək
OA vektorunu alırıq. Həndəsi olaraq z=a+ib kompleks ədədini OA vektoru ilə
göstərmək olar.
Koordinat başlanğıcını polyus, ox-in müsbət istiqamətini polyar ox qəbul
edərək, A(a, b) nöqtəsinin polyar koordinatlarını və r (r≥0 ) ilə işarə edək, onda
aşağıdakı bərabərlikləri yaza bilərik. a=r cos ϕ, b=r sin ϕ , nəticədə
z=a+ib=r (cos ϕ+i sin ϕ ) (2)
və ya
z=r (cosϕ+isin ϕ ) (3)
alarıq. (3) kompleks ədədin triqonometrik şəkli adlanır. r – kompleks ədədinin
modulu, – arqumenti adlanır və belə işarə edilir.
r= |z |, ϕ=Аrgz (4)
r və , a və b ilə r=√a2+b2 , ϕ=Arctg b
a , beləliklə
|z |=|a+ib |=√a2+b2 və
arg z=arg( a+ib )=Argtg ba (5)
(3)-də r≥0 götürülür. kəmiyyəti isə 2 kπ (k tam ədəddir) həddinə qədər
dəqiqliklə təyin olunur. ϕ=Argz=Arg ( x+ y ) Argz kəmiyyəti çoxqiymətlidir.
Buna görə də çox vaxt Argz -in baş qiymətini ayırmaq lazım gəlir. Argz -in
−π<Argz≤π (5)-nın müəyyən qiymətini onun baş qiyməti deyilir və arg z ilə işarə
olunur. z ədədi müsbət həqiqi ədəd olduqda arg z=0 , mənfi həqiqi ədəd olduqda
isə arg z=p olar.
Qeyd. z=a+ib və z=a−ib qoşma kompleks ədədləri üçün |z|=|z|, arqumentləri
isə arg z =-arg z¿ . A həqiqi ədədi (3) şəklində yazıla bilər.
A=A (cos0+ isin 0 ), A>0
A= |A | (cos π+isin π ) , A<0
olar. Kompleks 0 ədədin modulu 0-dır. |0|=0 , arqument isə j ¿ bucağı götürülə
bilər.
0=0(cos j+isin j) .
Fərz edək ki, z1=r1(cos ϕ1+isin ϕ1 ) , z=r2 (cosϕ2+i sin ϕ2 ), onda hasil üçün alırıq:
z1⋅z2=r1 r2 [ cos(ϕ1+ϕ2)+i sin(ϕ1+ϕ2 )]
olar.
Triqonometrik şəkildə verilibsə, onda qismət üçün alırıq:
z1
z2=
r1(cos ϕ1+isin ϕ1 )r2(cos ϕ2+isin ϕ1 )
=r1
r2[ cos(ϕ1−ϕ2 )+isin (ϕ1−ϕ2) ]
.
Qeyd. Kompleks ədədlərin üzərində əməllər nəticəsində kompleks ədəd alınır.
Qüvvətə yüksəltmə üçün alırıq:
[ r (cosϕ+i sin ϕ ) ]n=rn (cosnϕ+isin nϕ ) , n∈N
Kökalma üçün alırıq:
n√r (cos ϕ+i sin ϕ )=n√r (cos ϕ+2 πkn
+isin ϕ+2 πкn )
k=0 , 1 , . . . , n−1 .
5. Muavr düsturu. Eyler düsturu.
Qüvvətə yüksəltmə düsturunda r=1 olan halda, həmin düstura Muavr
düsturu deyilir.
.
Misal.
cos3 ϕ=cos3 ϕ−3 cos ϕ⋅sin2 ϕ ; sin 3 ϕ=−sin3ϕ+3cos2 ϕ⋅sin ϕ
Eyler düsturu. Kompleks ədədlər üçün Eyler düsturu
(1)
münasibətinə deyilir. Bu düsturun doğruluğu gələcəkdə sıralar nəzəriyəsində
isbat ediləcək. (1)-dən istifadə edərək
(2)
münasibətini
(3)
kimi yaza bilərik və ya
(4)
(3) ifadəsi z kompleks ədədin üstlü şəkli adlanır.
(5)
olar.
(1) və (5)
və (6)
(6) düsturları kompleks ədədin triqonometrik və üstlü formaların arasındakı əlaqəni əks etdirir.
Mövzü 17
Çoxhədlinin vuruğlara ayrılması.
1. Çoxhədli anlayışı və köklər haqqında əsas teoremlər.
2. Çoxhədlinin təkrarlanan köklər haqqında.
3. Həqiqi əmsallı çoxhədlinin həqiqi vuruqlara ayrılması.
1. Çoxhədli anlayışı və köklər haqqında əsas teoremlər.
(1) funksiyası n dərəcəli çoxhədli (polnom) adlanır. n çoxhədlinin
dərəcəsidir. – həqiqi və ya kompleks ədədlərdir. x – dəyişəni həm
həqiqi və həm də kompleks qiymətlər ala bilər. x dəyişəninin çoxhədlini
0-a çevirən qiymətinə çoxhədlinin kökü deyilir.
Teorem 1. (Bezu). f(x) çoxhədlisini x– a fərqinə böldükdə alınan
qalıq f(a)-ya bərabərdir.
İsbatı. f(x)-i -ya böldükdə natamam qismət f 1( x ) f(x)-in
dərəcəsindən bir vahid az olar. Qalıq isə sabit R ədədi olar. Beləliklə
. Bu bərabərlik x-in bütün qiymətlərində ( olduqda) doğrudur.
-ə keçsək
sol tərəf -ya sağ tərəf isə R-ə bərabər olar.
Yəni f(a) = R olar.
Nəticə. Əgər a çoxhədlinin kökü isə yəni isə, onda f(x) -ya
qalıqsız bölünür və nəticədə f ( x )=(x−a ) f 1( x ) .
çoxhədlisi n dərəcəli olanda, tənliyinə n dərəcəli cəbri tənlik
deyilir. Hər bir cəbri tənliyin kökü varmı?
Teorem 2. (Cəbrin əsas teoremi) Hər bir cəbri tənliyin () heç
olmasa bir həqiqi və ya kompleks kökü vardır.
Cəbri olmayan tənliklər üçün bu doğru deyildir. Məsələn cəbri
olmayan tənliyin heç bir kökü yoxdur.
Teorem 3. Hər bir n dərəcəli çoxhədlisi n sayda x–a şəkilli xətti
vuruğun və -in əmsalının hasili şəklində, yəni
şəklində göstərilə bilər.
İsbatı. Fərz edək ki, n – dərəcəli çoxhədli verilib.
Bu çoxhədlinin cəbrin əsas teoreminə görə heç olmasa bir kökü var.
Onu -lə işarə edək. Onda Bezu teoreminə görə
f ( x )=(x−a ) f 1( x ) . Burada f 1 (x )−( n−1)
dərəcəli çoxlhədlidir. yenə cəbrin əsas teoreminə görə kökü var. Onu -i
ilə işarə edək
f 1( x )=( x−a2) f 2( x )
, dərəcəli çoxluqdur. Analoji olaraq proses davam etdirsək
f n−1 (x )=( x−an ) f n alarıq. – sıfır dərəcəli çoxhədlidir. Bu ədəd aydındır
ki, xн əmsalı yəni -a bərabərdir. Nəticədə
(*) yaza bilərik.
(*) n – dərəcəli çoxlhədlini n-dən çox müxtəlif kökü ola bilməz.
Teorem 4. Əgər n – dərəcəli və çoxhədlilərinin qiymətləri
arqumentin sayda müxtəlif qiymətlərində üst-üstə düşürsə, onda həmin
çoxluqlar eyniliklə bərabərdirlər. .
Teorem 5. Əgər çoxhədlisi eyniliklə sıfır isə, onda onun bütün
əmsalları sıfra bərabərdir.
Teorem 6. Əgər iki çoxhədli eyniliklə bir-birinə bərabər isə, onda
bir çoxhədlinin əmsalları o biri çoxhədlinin uyğun əmsallarına
bərabərdir.
Ümumiləşmiş Viyet teoremi
=
=A0 xn−A0( a1+a2+. ..+an)xn−1+A0 (a1a2+a1 a3+ .. .+an−1 an) x
n−2−−A0(a1 a2 a3+a2 a2 an+. ..+an−2 an−1 an)x
n−3+. ..+ (−1)n a1⋅a2 .. .an⋅A0 ,
Bu bərabərliyin sol və sağ tərəfində olan x-in eyni qüvvətlərinin
əmsallarını bərabər etsək:
a1+a2+.. .+an=−A1
A0
. . . . . . . . . . . . . . . . . .
a1 a2 a3+. ..+an−1 an−2 an=−A3
A0
n – dərəcəli çoxhədlinin kökləri ilə əmsalları arasında əlaqə yaradan
bu düsturlara Viyet düsturları deyilir.
2. Çoxhədlinin təkrarlanan köklər haqqında.
n – dərəcəli f(x) çoxhədlisinin ϕ ( х )=А0(х−а1 )( х−а2) .. .( х−ан) ayrılışında
bəzi xətti vuruqlar bir-birinə bərabər olarsa onda həmin ayrılışı
ϕ ( х )=А0 (х−а1 )к1( х−а2 )
к2. .. (х−ам )км
şəklində yazmaq olar. Bu halda a1 – ədədi çoxhədlinin k1 dəfə, a2 – ədədi
k2 dəfə təkrarlanan kökü olacaq. Bunu nəzərə alsaq
n=к1+к 2+.. .+к м olar.
Nəticə. Yəni n dərəcəli hər bir çoxhədlinin düz n sayda həqiqi və ya
kompleks kökü vardır.
3. Həqiqi əmsallı çoxhədlinin həqiqi vuruqlara ayrılması.
Fərz edək ki, n – dərəcəli ϕ ( х )=А0 хн+А1 хн−1+. ..+Ан çoxhədlisinin A0,
A1,...An əmsallarının hamısı həqiqidir.
Teorem 1. Əgər а+ ib kompleks ədədi həqiqi əmsallı ϕ ( х )
çoxhədlisinin köküdürsə, onda həmin ədədin а−ib qoşması da onun
kökü olar.
Teorem 2. Həqiqi əmsallı hər bir ϕ ( х ) çoxhədlisi bir və ikidərəcəli
həqiqi əmsallı vuruqların hasili şəklində, yəni
ϕ ( х )=А0 (х−а1 )к1( х−а2 )
к2. .. (х−ар )к р
(x2+ p1 x+q1)l1 …(x2+ ps x+qs)
ls
şəklində göstərilə bilər.
Bu zaman к1+к2+. ..+кр+2l1+2l2+. . .+2ls=n .
Mövzu 18
İbtidai funksiya və qeyri-müəyyən inteqral. Əsas xassələr,
inteqrallar cədvəli. İnteqrallama üsulları.
1. İbtidai funksiya və qeyri-müəyyən inteqral. Qeyri-müəyyən
inteqralın əsas xassələri.
2. Əsas inteqrallar cədvəli.
3. İnteqrallama üsulları.
1. İbtidai funksiya və qeyri-müəyyən inteqral. Qeyri-müəyyən inteqralın əsas xassələri.
Tutaq ki, hər hansı f ( x ) funksiyası verilmişdir. Elə F (x ) funksi-yasını
tapmaq tələb olunur ki, onun törəməsi f ( x )-ə bərabər olsun, yəni F'( x )=f ( x ).
Tərif 1. Əgər [a , b ] parçasının bütün nöqtələrində F'( x )=f ( x ) bərabərliyi
ödənərsə, onda F (x ) funksiyasına f ( x ) funksiyasının ibtidai funksiyası deyilir.
Teorem . Əgər F 1(x ) və F 2( x ) – eyni bir f ( x ) funksiyasının [a , b ] parçasında
ibtidai funksiyalarıdırsa, onda onların fərqi sabit ədədə bərabərdir.
İsbatı . İbtidai funksiyanın tərifinə əsasən
F 1' (x )=f ( x ), F 2
' ( x )=f ( x ) (1)
eynilikləri [a , b ] parçasının istənilən x nöqtəsi üçün ödənilir. Əgər
F 1(x )−F 2( x )=ϕ( x ) (2)
qəbul etsək, onda (1) bərabərliklərinə əsasən
ϕ ' ( x )=[F 1( x )−F 2( x )]′= f ( x )− f ( x )=0
olduğundan [a , b ] parçasından götürülmüş istənilən x üçün ϕ' ( x )≡0 olar, bu
bərabərlikdən isə ϕ ( x )-in sabit olması alınır.
[a , b ] parçasında kəsilməz və diferensiallanan ϕ ( x ) funksiyasına Laqranj teoremini
tətbiq edək. Laqranj düsturuna əsasən [a , b ] parçasının ixtiyari x nöqtəsi üçün
ϕ ( x )−ϕ (a )=ϕ ' (ξ )⋅( x−a )
bərabərliyi doğrudur, burada a<ξ<x .
ϕ ' (ξ )=0 olduğundan ϕ ( x )−ϕ (a )=0 , yaxud
ϕ ( x )=ϕ (a ). (3)
Beləliklə, ϕ ( x ) funksiyası [a , b ] parçasının istənilən x nöqtəsində ϕ (a ) ədədinə
bərabər qiymət alır. Bu isə ϕ ( x ) funksiyasının [a , b ] parçasında sabit olması
deməkdik. ϕ (a ) sabitini C ilə işarə edərək, (2) və (3) bərabərliyindən alarıq ki,
F 1(x )−F 2( x )=С .
Bu teoremdən alınır ki, əgər verilmiş f ( x ) funksiyasının hər hansı bir F (x ) ibtidai
funksiyası tapılmışdırsa, onda f ( x ) üçün istənilən başqa ibtidai funksiya F (x )+C
şəklində olar, burada C=const .
Tərif 2. Əgər F (x ) funksiyası f ( x ) üçün ibtidai funksiyadırsa, onda F (x )+C
ifadəsinə f ( x ) funksiyasının qeyri-müəyyən inteqralı deyilir və ∫ f ( x )dx simvolu
ilə işarə edilir. Beləliklə, tərifə görə əgər F'( x )=f ( x ) olarsa, onda
∫ f ( x )dx=F ( x )+C
olar. Burada f ( x ) inteqralaltı funksiya, f ( x )dx inteqralaltı ifadə adlanır. Deməli,
qeyri-müəyyən inteqral y=F ( x )+C funksiyaları ailəsindən ibarətdir. Həndəsi
olaraq qeyri-müəyyən inteqral elə əyrilər çoxluğudur (ailəsidir) ki, bu əyrilərdən
hər biri digərindən özünə paralel olaraq yuxarı və ya aşağı (yəni OY oxu
boyunca) köçürmə nəticəsində alınır. Qeyd edək ki, [a , b ] parçasında kəsilməz f ( x ) funksiyasının ibtidai funksiyası (deməli, qeyri-müəyyən inteqralı) var. Ver-
ilmiş f ( x ) funksiyasının ibtidai funksiyasını tapmağa f ( x ) funksiyasını inteqral-
lamaq deyilir.
Tərif 2-dən alınır ki:
1. Qeyri-müəyyən inteqralın törəməsi inteqralaltı funksiyaya bərabərdir, yəni ax2+bx+c=t olarsa, onda
əvəzləməsi aparaq. Onda x-ın hər bir kəsr üstlü qüvvəti
t-nin tam qüvvəti ilə ifadə olunar və deməli, inteqralaltı funksiya t-nin rasional
funksiyasına çevrilər.
II. İndi
∫R [x ,( ax+bcx+b )
mn , . .. ,( ax+b
cx+b )rs ]dx
şəklində inteqrala baxaq. Bu inteqral
ax+bcx+b
=t k
əvəzləməsinin köməyi ilə t-nin rasional funksiyasının inteqralına gətirilir, burada
k ədədi mn
, .. . , rs kəsrlərinin ümumi məxrəcidir.
4. ∫R ( x,√ax2+bx+c )dx
(a≠0
) şəklində inteqrallar.
Belə inteqrallar aşağıdakı Eyler əvəzləmələrinin köməyi ilə yeni dəyişəninin
rasional funksiyasının inteqralına gətirilir.
1. Eylerin birinci əvəzləməsi. Əgər a>0olarsa,
√ax2+bx+c=±√a x+ t
əvəzləməsini qəbul edirik. Müəyyənlik üçün √a -nın işarəsini müsbət götürək.
Onda
ax2+bx+c=ax2+2√a xt+ t2
olar. Buradan isə x dəyişəni t-nin rasional funksiyası kimi tapılır:
x= t2−cb−2√a t
(deməli, dx də t ilə rasional şəkildə ifadə olunar). Buna görə √ax2+bx+c ifadəsi
t-nin rasional funksiyası olur
√ax2+bx+c=√a x+t=√a t2−cb−2t √a
+ t .
Beləliklə, √ax2+bx+c , x və dx ifadələri t vasitəsi ilə rasional şəkildə
göstərilir; deməli, verilmiş inteqral t-nin rasional funksiyasının inteqralına gətir-
ilir.
2. Eylerin ikinci əvəzləməsi. Əgər c>0 olarsa,
√ax2+bx+c=xt±√c
əvəzləməsini aparaq. Onda (müəyyənlik üçün √c qarşısındakı işarəni müsbət
götürək)
ax2+bx+c=x2t 2+2 xt√c+c .
Buradan x rasional funksiya kimi t ilə ifadə olunur:
x= 2√с t−ba−t 2 .
Göründüyü kimi, dx və √ax2+bx+c də t ilə rasional şəkildə
ifadə olunur; ona görə x, √ax2+bx+c və dx-in qiymətlərini ∫R (x ,√ax2+bx+c )dx
inteqralında yerinə yazaraq onu t-nin rasional funksiyasının inteqralına
gətirərik.
3. Eylerin üçüncü əvəzləməsi. Tutaq ki, α və β həqiqi ədədləri ax2+bx+c
üçhədlisinin kökləridir.
√ax2+bx+c=( x−α )t
qəbul edək. ax2+bx+c=a (x−α )( x−β ) olduğundan
√a( x−α )(x−β )=( x−α ) t ,
a (x−α )( x−β )=( x−α )2 t2 ,
a (x−β )=( x−α ) t2 .
Buradan x dəyişəni t-nin rasional funksiyası kimi ilə ifadə olunur:
x=αβ−α t 2
α−t2
.
dx və √ax2+bx+c də t ilə rasional ifadə olunduqlarından, verilmiş inteqral t-nin
rasional funksiyasının inteqralına gətirilir.
Qeyd . Eylerin üçüncü əvəzləməsi yalnız a<0 olduqda deyil, a>0 olduqda da
tətbiq olunur, ancaq ax2+bx+c çoxhədlisinin köklərinin həqiqi olmalıdır.
5. Triqonometrik ifadələrin inteqrallanması.
Əvvəlcə
∫R (sin x ,cos x )dx (1)
şəklində inteqrala baxaq. Göstərmək olar ki, bu inteqral
tg x2= t
(2)
əvəzləməsinin köməyi ilə həmişə rasional funksiyanın inteqralına gətirilə bilər.
sin x və cos x funksiyalarını tg x
2 vasitəsi ilə, deməli t ilə ifadə edək:
sin x=2sin x
2cos x
21
=2sin x
2cos x
2
sin2 x2+cos2 x
2
=2 tg x
2
1+ tg2 x2
= 2t1+t 2 ,
cos x=cos2 x
2−sin2 x
21
=cos2 x
2−sin2 x
2
cos2 x2+sin2 x
2
=1−tg2 x
2
1+tg2 x2
=1−t2
1+t 2 .
daha sonra
x=2 arctg t , dx= 2 dt1+ t2 .
Beləliklə, sin x , cos x və dx yeni t dəyişəni ilə rasional ifadə edildilər. Rasional
funksiyanın rasional funksiyası rasional funksiya olduğundan, alınmış ifadələri
(1) inteqralında yerinə yazıb, rasional funksiyanın inteqralını alarıq:
∫R (sin x ,cos x )dx=∫R( 2t1+t 2 , 1−t2
1+ t2 ) 2 dt1+t2 .
Baxılan əvəzləmə R(sin x ,cos x ) şəklində olan istənilən funksi-yanı inteqrallamağa
imkan verir. Ona görə də bəzən onu «universal triqonometrik əvəzləmə»
adlandırırlar. Lakin praktikada o, çox zaman həddən artıq mürəkkəb rasional
funksiyalara gətirib çıxarır. Ona görə də “universal” əvəzləmə ilə birlikdə bəzi
hallarda məqsədə daha tez nail olmağa imkan verən digər əvəzləmələri də bilmək
faydalıdır.
1) Əgər inteqral ∫R (sin x )cos x dx şəklindədirsə, onda sin x=t , cos x dx=dt
əvəzləməsi onu ∫R ( t )dt şəklində inteqrala gətirir.
2) Əgər inteqral ∫R (cos x )sin x dx şəklində olarsa, onda o, cos x=t , sin x dx=−dt əvəzləməsi ilə rasional funksiya inteqralına gətirilər.
3) İnteqralaltı funksiya yalnız tg x -dən asılı olarsa, onda tg x=t ,
x=arctg t , dx= dt1+t2
əvəzləməsi həmin inteqralı rasional funksiya inteqralına
gətirir:
∫R ( tg x )dx=∫ R( t ) dt1+t 2 .
4) Əgər inteqralaltı funksiya R(sin x ,cos x ) şəklində olarsa, ancaq sin x və
cos x yalnız cüt dərəcədən daxildirsə, onda həmin tg x=t əvəzləməsi tətbiq olunur,
çünki sin2 x və cos2 x funksiyaları f ( x ) ilə rasional şəkildə ifadə olunur:
cos2 x= 11+ tg2 x
= 11+ t2 ,
sin2 x= tg2 x
1+ tg2 x= t2
1+t 2 ,dx= dt1+t 2 .
5) İndi ∫R (sin x ,cos x )dx şəkilli bir inteqrala da baxaq: inteqral işarəsi altında
sinm xcosn x dx hasili durur (burada m və n tam ədədlərdir). Burada üç hala baxaq.
a) ∫sinm x cosn x dx inteqralında m və n ədədlərindən heç olmasa biri tək ədəddir.
Müəyyənlik üçün n ədədinin tək olduğunu qəbul edək (n=2 p+1 ) və inteqralı
çevirək:
∫sinm x cosn x dx=∫sinm x cos2 p x cos x dx=
=∫ sinm x (1−sin 2 x )p cos x dx .
sin x=t əvəz edək, onda cos x dx=dt və
∫sinm x cosn x dx=∫ tm(1−t 2)p dt
olar. Bu isə t-nin rasional fnksiyasının inteqralıdır.
b) ∫sinm x cosn x dx , burada m və n mənfi olmayan cüt ədədlərdir. f ( x )
qəbul edib, triqonometriyadan məlum olan düsturları yazaq:
sin2 x=1−cos2 x2
,
cos2 x=1+cos2 x2
. (3)
Bu ifadələrinin qiymətlərini inteqralda yerinə yazsaq alarıq
∫sin 2 p x cos2q x dx=∫( 1−cos 2 x2 )
p
( 1+cos2 x2 )
q
dx .
Qüvvətə yüksəldib, mötərizələri açdıqdan sonra ∫ab
f ( x )dx funksiyasının tək və cüt
dərəcəli qüvvətlərini alarıq. Tək dərəcəli hədlər a) halında göstərilən qayda ilə
inteqrallanır, cüt dərəcəli qüvvətlərin dərəcəsini isə yenə (3) düsturlarının köməyi
ilə azaldırıq. Bu qaydanı davam etdirərək ∫cos kx dx həddinə gəlib çıxarıq, bu isə
asan inteqrallanır.
c) Əgər hər iki qüvvət üstü cüt və heç olmasa biri mənfi olarsa, onda yuxarıda
göstərdiyimiz üsül bir nəticə vermir. Bu halda tg x=t (yaxud [a , b ] ) əvəzləməsi
əlverişlidir.
6) Sonda
∫cos mx cosnx dx , ∫ sin mx cosnx dx , ∫sin mx sin nx dx
şəklində inteqrallara baxaq. Bunlar aşağıdakı düsturların ( f ( x )≤g( x )) köməyi ilə
hesablanır:
cos mx cosnx=12 [cos (m−n )x+cos(m+n ) x ] ,
sin mx cos nx=12 [sin(m−n )x+sin(m+n )x ] ,
sin mx sin nx=12 [cos (m−n )x−cos(m+n )x ] .
Mövzu 21
Müəyyən inteqral. Müəyyən inteqralın əsas xassələri. Müəyyən
və qeyrimüəyyən inteqrallar arasında əlaqə. Nyuton-Leybnis
düsturu. Müəyyən inteqralın hesablanması üsulları.
1. Müəyyən inteqral.
2. Müəyyən inteqralın əsas xassələri.
3. Müəyyən inteqralda dəyişəni əvəzetmə və hissə-hissə
inteqrallama.
4. Müəyyən inteqralın təqribi hesablanması.
1. Müəyyən inteqral
Tutaq ki, [a , b ] parçasında kəsilməz y= f ( x ) funksiyası verilmişdir. Bu
parçanı a=x0 , x1 , x2 , .. . , xn−¿1 ,xn=b ¿ bölgü nöqtələri ilə n ixti-yari hissələrə bölək, belə
ki,
x0<x1<x2< .. .<xn−¿1< xn. ¿
x1−x0=Δx1 , x2−x1=Δx2 , … ,xn−xn−1=Δxn
işarələrini qəbul edək. [ x i−1 , x i ]parçalarının hər birində bir ξ i nöqtəsi götürək (x i−1≤ξi ¿ xi ) və aşağıdakı cəmi düzəldək
σ=f (ξ 1)Δx1+ f ( ξ2 )Δx 2+. . .+ f (ξn )Δxn=∑i=1
n
f (ξ i)Δxi . (1)
Bu cəmi [a , b ]-nin xüsusi parçalara verilmiş bölgüsunə və ξ i aralıq nöqtələrinin
verilmiş seçiminə uyğun olan [a , b ] parçasında f ( x ) funksiyası üçün inteqral cəmi
adlandıracıq.
f ( x )≥0 olduqda σ inteqral cəminin həndəsi mənası aydındır: o oturacaqları Δx1 , Δx2 , .. . , Δxn və hündürlükləri f (ξ 1) , f (ξ2) , .. . , f (ξn ) olan düzbucaqların sahələri
cəminə bərabərdir (şəkil 1).
xO xn =
bx1 x2 xn
-1x0 =
a1 2
A1A
0
A2
A3
A2n-1 A2
n
y = f(x)Шякил 21
n
f(1)
f(2)
f(n)
y
Şəkil 1
y y = f (x)
ba xO
Şəkil 2
İndi, [ x0 , x1 ] , [ x1 , x2 ] , …, [ xn−1 , xn ] parçaları içərisində ən böyük olanının uzunluğunu
λ=max1≤i≤n
Δxi
ilə işarə edək.
Tərif . Əgər λ→0 şərtində (1) inteqral cəminin sonlu I limiti varsa, onda bu
limit f ( x ) funksiyasının [a , b ] parçasında müəyyən inteqralı adlanır və aşağıdakı
kimi işarə edilir
I=∫a
b
f ( x )dx=limλ→ 0∑i=1
n
f (ξi )Δxi . (2)
Bu halda f ( x ) funksiyasına [a ,b ] parçasında inteqrallanan funksiya deyilir. f ( x ) –
inteqralaltı funksiya, a və b ədədləri uyğun olaraq inteqralın aşağı və yuxarı
sərhədləri, x isə inteqrallama dəyişəni adlanır.
f ( x )≥0 olduqda ∫a
b
f ( x )dx inteqralı ədədi qiymətcə əyrixətli
trapesiya adlanan fiqurun sahəsinə bərabər olur. Əyrixətli trape-
siya (şəkil 2) yuxarıdan y= f ( x ) funksiyasının qrafiki, aşağıdan
OX oxu və yanlardan x =a , x =b düz xətləri ilə hüdudlanan
fiqura deyilir.
Teorem . Əgər y=f ( x ) funksiyası [a , b ] parçasında kəsilməzdirsə, onda həmin parçada inteqrallanandır.
2. Müəyyən inteqralın əsas xassələri
1. Müəyyən inteqral yalnız f ( x ) funksiyasının şəklindən və inteqralın
sərhədlərindən asılı olur, inteqrallama dəyişənindən isə asılı olmur. Ona görə də
inteqrallama dəyişənini istənilən hərflə işarə etmək olar:
∫a
b
f ( x )dx=∫a
b
f ( t )dt=.. .=∫a
b
f ( z )dz.
2. Əgər yuxarı və aşağı sərhədlər üst-üstə düşərsə, onda inteqral sıfra bərabərdir:
∫a
a
f ( x )dx=0.
3. Yuxarı və aşağı sərhədlərin yerini dəyişəndə inteqral öz qiymətini əksinə dəyişər
∫a
b
f ( x )dx=−∫b
a
f ( x )dx.
4. a, b, c ədədlərinin neçə olmalarından asılı olmayaraq aşağıdakı bərabərlik doğrudur
∫a
b
f ( x )dx=∫a
c
f ( x )dx+∫c
b
f ( x )dx.
5. Sabit vuruğu müəyyən inteqral işarəsi xaricinə çıxarmaq olar, yəni A=const olduqda
∫a
b
Af ( x )dx=A∫a
b
f ( x )dx.
6. Bir neçə funksiyanın cəbri cəminin müəyyən inteqralı toplananların inteqral-larının cəbri cəminə bərabərdir
∫a
b
[ f 1( x )± f 2( x )] dx=∫a
b
f 1( x )dx±∫a
b
f 2( x )dx.
7. Əgər [a , b ] parçasınında f ( x )≥0 olarsa, onda
x+x
y = f (x)
a x
y
x
X
A
O
(x) f (
Şəkil 3
∫a
b
f ( x )dx≥0.
8. [a , b ] parçasında f ( x )≤g( x ) olarsa, onda
∫a
b
f ( x )dx≤∫a
b
g( x )dx.
9. [a , b ] parçasında təyin olunmuş f ( x ) funksiyası üçün aşağıdakı bərabərlik doğrudur:
|∫a
b
f ( x )dx|≤∫a
b
|f ( x )dx|.
10. Əgər m və M ədədləri f ( x ) funksiyasının [a , b ] parçasında ən böyük və ən kiçik qiymətləri və a≤b olarsa, onda
m(b−a )≤∫a
b
f ( x )dx≤M (b−a).
11. Orta qiymət haqqında teorem. Əgər f ( x ) funksiyası [a , b ] parçasında kəsilməzdirsə, onda bu parçada elə ξ nöqtəsi tapmaq olar ki, aşağıdakı bərabərlik doğru olsun:
∫a
b
f ( x )dx=f (ξ )⋅(b−a).
Müəyyən və qeyri-müəyyən inteqrallar arasında əlaqə
Tutaq ki, ∫a
b
f ( x )dx inteqralının aşağı sərhədi həmişəki kimi sabit ədəddir, lakin
yuxarı sərhədi – b dəyişir. Onda inteqralın qiyməti də dəyişər, yəni inteqral
yuxarı sərhədin funksiyasıdır.
Yuxarı sərhədi x ilə işarə edək və bunu inteqrallama dəyişəni ilə qarışdırma-
maq üçün sonuncunu t ilə işarə edək ∫a
x
f ( t )dt .
a sabit olduğundan bu inteqral yuxarı sərhədin, yəni x-in
funksiyasını təyin edir. Bu funksiyanı Φ (x ) ilə işarə edək
Φ (x )=∫
a
x
f ( t )dt . (1)
Əgər f ( x ) mənfi deyilsə, Φ (x ) funksiyası ədədi qiymətcə aAXx əyrixətli trape-
siyasının sahəsinə bərabərdir (şəkil3). Aydındır ki, həmin sahə
x-dən asılı olaraq dəyişir.
Teorem . Əgər f ( x ) funksiyası kəsilməzdirsə, onda yuxarı sərhədi dəyiəşən
olan müəyyən inteqralın törəməsi vardır və inteqralaltı funksiyanın yuxarı
sərhəddə aldığı qiymətə bərabərdir, yəni
Φ '( x )=(∫a
x
f ( t )dt )′
= f ( x ) . (2)
İsbatı . x-in ixtiyari x∈ [a ,b ] qiymətini götürək və ona elə Δx≠0 artımı verək
ki, a≤x+Δx≤b . Onda müəyyən inteqralın 4-cü xassəsinə əsasən alarıq:
Φ (x+Δx)= ∫a
x+Δx
f ( t )dt=∫a
x
f ( t )dt+ ∫x
x+ Δx
f ( t )dt=Φ( x )+ ∫x
x+Δx
f ( t )dt .
Buradan Φ (x ) funksiyasının artımını tapaq:
Φ (x+Δx)−Φ ( x )= ∫a
x+Δx
f ( t )dt.
Orta qiymət haqqında teoremi (11-ci xassə) tətbiq etsək, alarıq
Φ (x+Δx)−Φ ( x )=f (ξ )Δx ,
burada ξ ədədi x ilə x + x arasındadır. Bərabərliyin iki tərəfini də x bölək
Φ( x+Δx )−Φ (x )Δx
=f (ξ ).
Əgər indi Δx→0 , onda ξ→ x və f ( x ) funksiyası [a , b ] parçasında kəsilməz
olduğu üçün f ( x ) . Onda axırıncı bərabərlikdə Δx→0 şərtində limitə
keçsək alarıq
limΔx→0
Φ (x+Δx )−Φ ( x )Δx
= limΔx→0
f (ξ )=limξ→ x
f (ξ )=f (x )
və ya Φ'( x )=f ( x ). Teorem isbat olundu.
Beləliklə, müəyyən edilib ki, istənilən [a , b ] parçasında kəsilməz f ( x )
funksiyasının bu parçada ibtidai funksiyası var və Φ (x ) funksiyası – yuxarı
sərhədi dəyişən olan müəyyən intaqral – f ( x ) üçün ibtidai funksiyadır. f ( x )
funksiyası üçün başqa ibtidai funksiya Φ (x )-dan yalnız C sabitinə
fərqləndiyindən biz müəyyən və qeyri-müəyyən inteqral arasında olan əlaqəni
müəyyən etmiş oluruq:
∫ f ( x )dx=∫a
x
f ( t )dt+C .
3. Müəyyən inteqralda dəyişəni əvəzetmə və hissə-hissə
inteqrallama.
Teorem . Əgər F(x) funksiyası verilmiş f ( x )-in ibtidai funksiyalarından biri
olarsa, onda
∫a
b
f ( t )dt=F( b)−F (a ) (1)
düsturu doğrudur. Bu düstura Nyuton-Leybnis düsturu deyilir.
İsbatı . Tutaq ki, F(x) funksiyasıf ( x )-in hər hansı bir ibtidai funksiyasıdır.
Yuxarıda isbat olunan teoremə görə ∫a
x
f ( t )dt funksiyası da f ( x ) üçün ibtidaidir.
Verilən funksiyanın iki ibtidaisi bir-birindən C sabiti qədər fərqləndiyindən aşağıdakı kimi yazmaq olar
∫a
x
f ( t )dt=F( x )+C . (2)
C sabiti düzgün seçildikdə bu bərabərlik istənilən x üçün doğrudur, yəni eynilikdır. Bu C sabitini tapmaq üçün bu eynilikdə x=a götürək, onda
∫a
a
f ( t )dt=F( a)+C,
yaxud 0=F( a)+C ; və buradan C=−F (a ).
Deməli,
∫a
x
f ( t )dt=F( x )−F( a).
Burada x = b götürməklə Nyuton-Leybnis düsturunu alarıq
∫a
b
f ( t )dt=F( b)−F (a ),
və yaxud inteqrallama dəyişəni x götürərək
∫a
b
f ( x )dx=F (b )−F( a).
Əgər fərqi simvolik olaraq
F (b)−F( a)=F ( x )|ab
şəklində işarə etsək, onda (1) düsturunu belə yazmaq olar
∫a
b
f ( x )dx=F ( x )|ab=F( b)−F (a )
.
İnteqralaltı funksiyanın ibtidai funksiyası məlum olduqda Nyuton-Leybnis düsturu müəyyən inteqralı hesablamaq üçün əlverişli üsul verir.
4. Müəyyən inteqralın təqribi hesablanması.
Düzbucaqlılar düsturu. Tutaq ki, [a , b ]
parçasında kəsilməyən y=f(x)
funksiyası verilmişdir və
∫a
b
f ( x ) dx (1)
inteqralını təqribi hesablamaq tələb olunur.
∫a
b
f ( x ) dx≈b−an ( y0+ y1+ y2+…+ yn−1)
(2)
∫a
b
f ( x ) dx≈b−an ( y1+ y2+…+ yn)
(3)
bunlara düzbucaqlılar düsturu deyilir. Trapeslər düsturu . Bu halda (1) əvəzinə
∫xk
xk+1
f ( x ) dx≈yk+ yk+1
2Δxk
(4)
təqribi bərabərliyi götürülür. Bu təqribi bərabərlikləri tərəf-tərəfə toplasaq
∫a
b
f ( x ) dx≈b−a2 n [ y0+2 y1+2 y2+…+2 yn−1+ yn ]
(5)
təqribi bərabərliyi alınır. Buna (1) müəyyən inteqralının təqribi
hesablanması üçün
trapesiyalar düsturu deyilir.
Parabolalar və ya Simpson düsturu.
(1) Inteqralını təqribi hesablamaq üçün bu halda [a , b ]
parçasını
a=x0¿¿
nöqtələri vasitəsilə 2n sayda bərabər hissələrə ayırırlar.
∫a
b
f ( x ) dx≈b−a6n ∑
k=0
n−1
( y2k+4 y2 k+1+ y2 k+2)=
=b−a6n [ ( yo+ y2 n)+4 ( y1+ y3+…+ y 2n−1 )+2 ( y2+ y 4+…+ y 2n−2 )]
təqribi bərabərliyini alarıq.
Mövzu 22
Qeyri-məxsusi inteqrallar.
1. Sonsuz sərhədli inteqrallar.
2. Kəsilən funksiyaların inteqralları.
3. Puasson inteqralı.
1. Sonsuz sərhədli inteqrallar.
Tutaq ki, f(x) funksiyası a ≤ x≤+∞ sonsuz yarıqapılı intervalında kəsilməzdir.
Istənilən b a üçün ∫a
b
f (x )dx inteqralı mövcüddur və b dəyişdikcə da dəyişir,
inteqral b yuxarı sərhədinin kəsilməz funksiyasıdır. Bu inteqralın b→+∞ şərtində
dəyişməsinin xarakterini öyrənək.
Tərif. Əgər
limb→+∞∫
a
b
f (x )dx
Limiti varsa və sonludursa, onda həmin limitə f(x) funksiyasının [a ,+∞¿
intervalında qeyri-məxsusi inteqral deyilir və
∫a
+∞
f (x )dx (1)
simvolu ilə işarə edilir. Deməli, tərifə əsasən
∫a
+∞
f (x )dx = limb →+∞∫
a
b
f (x )dx
Bu halda deyirlər ki, ∫a
+∞
f (x )dx qeyri-məxsusi inteqral var, yaxud yığılır. Əgər b
→+∞ şərtində ∫a
b
f (x )dx inteqralının sonlu limiti yoxdursa, onda deyirlər ki, ∫a
+∞
f (x )dx
qeyri-məxsusi inteqralı dağılır, yaxud yoxdur.
Misal 1. ∫0
+∞
cos xdx qeyri-məxsusi inteqralı hesablayın.
∫0
+∞
cos xdx = limb →+∞∫
0
b
cos xdx = limb →+∞
sin∨¿0b¿ = lim
b →+∞sin b,
yəni limiti yoxdur. Deməli, qeyri-məxsusi inteqral dağılandır.
Misal 2. ∫0
+∞
2 xdx inteqralı hesablayın.
∫0
+∞
2xdx = limb →+∞∫0
b
2 xdx = limb →+∞
x2∨¿0b ¿ = lim
b →+∞b2
= + ,
yəni qeyri-məxsusi inteqral dağılandır.
Misal 3. ∫1
+∞ dxx2 inteqralı hesablayın.
∫1
+∞ dxx2 = lim
b →+∞∫
1
+∞ dxx2 = lim
b →+∞ (−1x )b1 = lim
b→+∞¿(−1
b +1) =1.
Deməli, qeyri-çəxsusi inteqral yığılandır.
Tutaq ki, F(x) funksiyası f(x) funksiyasının ibtidai funksiyasıdır.
Onda
∫a
+∞
f (x )dx = limb→+∞∫
a
b
f (x )dx = limb →+∞
[F (b )−F (a) ] = limb →+∞
F (b )−F (a).
Əgər limx→+∞
¿ F(x) = F( ) işarəsini qəbul etsək, onda Nyuton-Leybnis düsturunun
analoqunu alırıq:
∫a
+∞
f (x )dx = F( ) – F(a) (2)
f(x) 0 olduqda qeyri-məxsusi inteqralın sadə həndəsi mənası var: ∫a
b
f (x )dx
inteqralı, y = f(x) əyrisi, absis oxu və x=a, x=b düz xətləri ilə əhatə olunan
əyrixətli trapesin sahəsini ifadə etdiyi kimi, ∫a
+∞
f (x )dx qeyri-məxsusi inteqralı da y
= f(x) əyrisi, x=a xətti və absis oxu arasında qalan qeyri-məhdud (sonsuz) oblastı
sahəsini ifadə etdiyini demek təbiidir.
Başqa sonsuz intervallarda da qeyri-məxsusi inteqral anlayışı oxşar qayda ilə
verilir:
∫−∞
b
f (x)dx = limx→+∞∫
a
b
f (x )dx,
∫−∞
+∞
f (x)dx = lima →−∞b →+∞
∫a
b
f (x)dx.
2. Kəsilən funksiyaların inteqralları.
Tutaq ki, f(x) funksiyası a≤ x≤ b intervalında təyin olunub və kəsilməzdir,
lakin x=b nöqtəsində kısilir (limx→ b
f ( x )=∞). a və b nöqtələri arasında β nöqtəsini
götürək. Onda aydındır ki, f(x) funksiyası [a , β ] parçasında kəsilməzdir və onun
∫a
b
f (x )dx inteqralı var. Bu halda
limβ→b∫
a
β
f ( x )dx (3)
Limitinə qeyri-məxsusi inteqral deyilir və
∫a
b
f ( x )dx (4)
simvolu ilə işarə olunur. Əgər (3) limiti varsa və sonludursa, onda deyirlər ki, (4)
inteqralı yağılandır.
Əgər f(x) funksiyası [a , b ] parçasının daxılı bir x=c nöqtəsində kəsilirsə, onda
∫a
b
f ( x )dx = ∫a
c
f ( x )dx + ∫c
b
f ( x )dx (a¿c<b<¿).
Burada sağ tətəfdə duran hər iki qeyri-məxsusi inteqralların varlığı fərz olunur.
2-ci tip inteqrala dəqiq fikir vermək lazımdır, çünkü bir şox hallarda səhvə yol
verilir.
Misal 4. I = ∫−1
1 dxx2 inteqralını hesablayın.
I =∫−1
1 dxx2 = (−1
x ) 1−1 = −1−1=−2.
Lakin bu doğru deyildir, çünki inteqralaltı funksiya müsbət olduğundan ( 1x2>0)
inteqralın qiyməti də müsbət olmalıydı. İnteqrallama intervalı daxilində x=0
∈ [−1,1 ] nöqtəsində inteqralaltı funksiya kəsilir, deməli, tərifə əsasən, verilən
inteqralı iki toplananın səmi kimi göstərməliyik:
I = ∫−1
1 dxx2 = ∫
−1
0 dxx2 + ∫
0
1 dxx2 = lim
β →0∫−1
β dxx2 + lim
α →0∫α
1 dxx2 =
= limβ →0¿ (−1
x ) β−1 + limα →0
¿ (−1x ) 1α=
limβ →0¿ (−1
β+1)+ lim
α →0 (−1+ 1α ) =+∞+∞=+∞.
Beləliklə, verilən inteqral [−1,1 ] parçasında dağılandır.
3. Puasson inteqralı.
Ehtimal nəzəriyyəsində əhəmiyyətli rol oynayan sonsuz sərhədli qeyri-məxsusi
∫−∞
+∞
e− x2
a2
dx inteqrala baxaq. Xüsusi halda (a=1 olduqda) ∫−∞
+∞
e−x2
dx inteqralı Puassonun
adı ilə məşhurdur. Bu inteqral yığılandır və onun qiyməti
∫−∞
+∞
e−x2
dx= √π və ya ∫−∞
+∞
e−x2
dx = √π2 .
Mövzu 23
Müəyyən inteqralın həndəsi tədbiqləri.
1. Qövsün uzunluğu.
2. Fırlanmadan alınan cismin həcmi.
3. Firlanmadan alınan səthin sahəsi.
4. Əyrixətli trapesiyanın sahəsi.
1. Qövsün uzunluğu.
Müstəvi əyrinin gövsünün üzünlüğunu tapmaq üçün həmin əyri xətti ya
y = f(x) , ya x = f(y), və ya x = x(t), y=y(t) parametrik şəklində yazmaq lazımdır.
Onda həmin gövsün diferensialı funksiyanın verilməsinə uyğun olaraq:
y=f ( x )=¿dl=√1+( y´ )2 dx
x= f ( y )=¿dl=√1+(x´ )2 dy
x=φ (t)y=ψ (t )
=¿dl=√ (x´ )2+ ( y´ )2 dt
Bütöv qövsün AB uzunluğu isəuyğun olaraq aşağıdakı kimi hesablanır:
y=f ( x )=¿ L AB=∫x A
xB
√1+( y´ )2 dx=∫A
B
dl
x= f ( y )=¿ L AB=∫yA
yB
√1+(x´ )2dy=∫A
B
dl
x=φ (t)y=ψ (t )
=¿ LAB=∫t A
tB
√ (x´ )2+( y´ )2dt
burada x A , xB−¿nöqtələrin absisləri, y A , yB−¿ordinatlarıdır.
Əgər hamar əyrinin tənliyi polyar koordinatlarda tənliyi ilə verilirsə (
, onda qövsün uzunluğu
düstüru ilə hesablanır.
2. Fırlanmadan alınan cismin həcmi.
Burada iki variant mövcuddur.
1) Əgər figur əyrixətli trapesiyanın və ya hər hansı əyrinin OX oxu ətrafında
fırlanmadan alınarsa, onda cismin parçasından götürülmüş istənilən x
nöqtəsindən şaquli istiqamətində aparılan kəsik R = f(x) radiuslu bir dairədir.
Buna görə də, həmin kəsiyin sahəsi kimi hesablanır. Nəticədə
fırlanma cismin həcmi:
(1)
düstura əsasən hesablanır.
2) Əgər fırlanma cismi əyri xəttin OY oxu ətrafında fırlanmadan əmələ gələrsə,
onda onun həmin parçadan götürülmüş istənilən x nöqtəsindən şaquli
istiqamətində aparılan kəsik R = X radiuslu dairədir və həmin kəsiyin sahəsi indi
artiq kimi hesablanır. Nəticədə alınan fırlanma cismin bütöv
həcmi:
(2)
Misal 1. Verilmiş və xətlərin müstəvi figurunun OX oxu
ətrafında fırlanma nəticəsində alınan fəza cisminin həcmini tapın.
Həlli. Fırlanma nəticəsində alınan cismin adı parabolik seqmentdir. Fırlanma
OX oxu ətrafında aparıldıqına görə (1) düsturdan istifadə edək. Burada
.
Misal 2. Ellipsin OY oxu ətrafında fırlanma nəticəsində
alınan cismin həcmini tap.
Həlli. Fırlanma nəticəsində alınan cismin adı ellipsoiddir. Fırlanma OY oxuna
görə aparıldıqından (2) düsturdan istifadə edək, amma əvvəlcə üçün ifadəni
alaq.
(2) düstura görə alırıq:
Nyuton-Leybnis düsturunu tətbiq etdikdə alırıq:
.
3. Firlanmadan alınan səthin sahəsi.
Əgər cismin səthi qövsün OX oxu ətrafında fırlanmadan əmələ gələrsə,
onda onun sahəsinin diferensialı oturacaqlarının radiusları uyğun olaraq
r = y; R = y + ∆y
və doğuranı dl olan kəsik konusun yan səthinin sahəsinə bərabərdir.
Nəticədə səthin bütöv sahəsi
Əgər fırlanma OY oxu ətradında aparılarsa, onda alınan cismin vəziyyətini
nəzərə alaraq onun səthinin sahəsi:
düsturuna görə hesablanar.
4. Əyrixətli trapesiyanın sahəsi.
Əgər əyrixətli trapesiya bir funksiyanın qrafikinin əyrisi ilə
məhdudlaşdırılmışdır, onda onun sahəsini
.
Əgər əyrixətli trapesiya iki əyri xətli arasında qalan bir sahə olarsa, onda
onun sahəsini
Əgər misalda aşağı və yuxarı sərhədlər məchul olarsa, onları müəyyən
etmək üçün tənliyinin köklərini taparaq kimi
götürürük.
Əgər alınan sahə qrafiklərin kəsişmə nöqtələrinə görə bir neçə hissəyə
bölünərsə, onda bütöv trapesiyanın sahəsini bu kəmiyyətin additivlik xassəsinə
görə parçaların ayrı-ayrılıqda hesablanmış sahələrinin cəmi kimi göstərmək
mümkündür.
Misal. və xətləri ilə məhdudlaşdırılmış əyrixətli
trapesiyanın sahəsini tapın.
Həlli. 1) Əvvəlcə qrafiklərin kəsişmə nöqtələrini müəyyən edək:
tənliyini həll edərək alırıq:
deməli, alınan sahəni parçada axtarırıq.
2) İndi isə bir başa sahəni hesablayaq:
.
Polyar koordinatların köməyi ilə əyrixətli trapesiyanın sahəsi
Mövzu 24
Çoxdəyişənli funksiya. Çoxdəyişənli funksiyanın
limiti və kəsilməzliyi. Xüsusi törəmələr.
Çoxdəyişənli funksiya anlayışı.
1. Çoxdəyişənli funksiya haqqında anlayış.
2. Çoxdəyişənli funksiyaların tərifi. 3. Çoxdəyişənli funksiyaların xüsusi artımları. 4. Çoxdəyişənli funksiyaların tam artımı və limiti.
1. Çoxdəyişənli funksiya haqqında anlayış.
Bir çox hadisələri öyrənən zaman iki və daha çox dəyişəndən asılı olan
funksiyalara təsadüf olunur.
Tərif 1. Əgər D dəyişmə oblastından götürülmüş bir-birindən asılı olmayan
iki x və y dəyişən kəmiyyətinin hər bir (x, y) qiymətlər cütünə z kəmiyyətin
müəyyən bir qiyməti uyğun olarsa onda deyirik ki, z kəmiyyəti x və y sərbəst
dəyişənlərinin funksiyasıdır və D oblastında təyin olunmuşdur.
İki dəyişənin funksiyası simvolik olaraq belə işarə olunur:
z = f (x, y), z = F (x, y) və s.
İkidəyişənli funksiya cədvəl vasitəsi ilə və ya analitik şəkildə – düstur vasitəsi
ilə verilə bilər. Birdəyişənli funksiyada olduğu kimi, ikidəyişənli funksiya da x və
y arqumentlərinin, ümumiyyətlə, bütün qiymətlərində təyin olunmur.
Tərif 2. x və y dəyişənlərinin z= f ( x , y ) funksiyasının təyin olunduğu (x, y)
qiymətlər cütünün çoxluğuna bu funksiyanın təyin oblastı və ya varlıq oblastı
deyilir.
Funksiyanın təyin oblastı həndəsi olaraq belə təsvir edilə bilər. Əgər x və y
dəyişənlərinin hər bir qiymətlər cütünü OXY müstəvisi üzərində M (x, y) nöqtəsi
kimi göstərsək, onda funksiyanın təyin oblastı müstəvi nöqtələlrinin müəyyən bir
çoxluğu əmələ gətirər. Həmin bu nöqtələr çoxluğuna funksiyanın təyin oblastı
deyəcəyik. Hər hansı oblastı hüdudlandıran xətt həmin oblastın sərhədi adlanır.
Oblastın sərhədi üzərində yerləşməyən nöqtələrinə onun daxili nöqtələri deyilir.
İkidəyişənli funksiyanın tərifini üç və daha çox dəyişənin funksiyası üçün də
asanlıqla ümumiləşdirmək olar.
Əlavə məlumat.
1) Əgər z= f ( x , y ) funksiyasında dəyişənlərdən birini fiksə eləsək, onda
ikidəyişənli funksiya birdəyişənli funksiya kimi gəbul oluna bilər. Misal kimi
O
z
yx
22 yxz
z
x
yP
O
z
x y
G
S = xy düzbucaqlının sahəsini ifadə edən düstura biz iki x(eni), y(uzunluğu)
dəyişənli funksuya kimi baxa bilərik.
2) Ümumi halda z= f ( x , y )funskiyasının qrafiki Oxyz fəzada bir səth kimi təsvir
etmək mümkündür.
Tərif 3. z= f ( x , y )funksiyanın eyni qiymətini alan Oxy müstəvisinin nöqtələr
toplusuna həmin funksiyanın kontur xətti və ya izoəyri deyilir və aşağıdakı kimi
yazılır:
f(x, y)= C
2. Çoxdəyişənli funksiyaların tərifi.
Tərif 1. Əgər x1 , x2 , x3 , .. . , xn dəyişənlərinən baxılan hər bir qiymətlər
çoxluğuna y dəyişəninin müəyyən bir qiyməti uyğun olarsa, onda y kəmiyyətinə x1 , x2 , x3 , .. . , xn dəyişənlərinin funksiyası deyilir və y=F ( x1 , x2 , x3 , .. . , xn ), yaxud y=f ( x1 , x2 , x3 , .. . , xn ) və s. kimi işarə edilir.
İkidəyişənli funksiyada olduğu kimi, üç, dörd və daha çox dəyişənli funksiyaların
da təyin oblastından danışmaq olar. Məsələn, üçdə- yişənli funksiyanın təyin
oblastı (x, y, z) ədədlər üçlüyünün müəyyən çoxluğu olur. Qeyd edək ki,
ədədlərin hər bir üçlüyü OXYZ fəzasının bir M (x, y, z) nöqtəsini təyin edir.
İkidəyişənli funksiyanın həndəsi təsviri . OXY müstəvisində
yerləşən G oblastında təyin olunmuş
z= f ( x , y ) (1)
funksiyasını və OXYZ düzbucaqlı Dekart koordiniat sistemi götürək. G təyin
oblastının hər bir (x, y) nöqtəsində OXY müstəvisinə qaldırılmış perpendikulyar
üzərində f (x, y) ədədinə bərabər parça ayıraq. Onda biz fəzada koordinatları x, y,
z=f ( x , y ) olan P nöqtəsini alarıq (şəkil 1). Koordinatları (1) tənliyini ödəyən P
nöqtələrinin həndəsi yerinə ikidəyişənli funksiyanın qrafiki deyilir. (1) tənliyi
fəzada müəyyən bir səthi təyin edir. Beləliklə, ikidəyişənli funksiyanın qrafiki
səthdən ibarətdir, bu səthin OXY müstəvisi üzərindəki proeksiyası funksiyanın G
təyin oblastı olur.
Üç və daha çox arqumetli funksiyaların fəzada qrafiklərini əyani təsvir etmək
mümkün deyil.
3. Çoxdəyişənli funksiyaların xüsusi artımları.
Tutaq ki, z=f ( x , y ) ikidəyişənli funksiyası verilmişdir. OXY müstəvisinə paralel
olan y = const müstəvisinin z=f ( x , y ) səthini kəsdiyi PS xəttinə baxaq (şəkil 2). Bu
müstəvi üzərində y qiymətini sabit saxladığı üçün, PS xətti boyunca z-in
dəyişməsi ancaq x-in dəyişməsindən asılı olar. x sərbəst dəyişəninə x artımı
versək onda z uyğun artım alar. Bu artıma z funksiyasının x arqumentinə görə
xüsusi artımı deyilir və Δx z ilə işarə edilir, belə ki,
Δx z = f (x + x, y) – f (x, y). (1)
Analoji olaraq, x-in qiyməti sabit qalmaqla y dəyişərsə, onda z funksiyanın aldığı
artıma funksiyanın y arqumentinə görə xüsusi artımı deyilir. Bu artımı Δ y z
simvolu ilə işarə edirlər:
SxzS
P
O
zz
y
yy
xx x
Şəkil 2
Δ y z= f ( x , y+Δy )− f ( x , y ). (2)
Funksiya öz Δ y z xüsusi artımını z= f ( x , y ) səthi ilə OYZ müstəvisinə paralel olan
x=const müstəvisinin kəsişdiyi “xətt boyunca” alır.
Nəhayət, x arqumentinə x artımını, y arqumentinə
isə y artımını verməklə z üçün yeni z artımını
alarıq. Bu artım funksiyanın tam artımı adlanır və
Δz=f ( x+Δx , y+Δy)− f ( x , y ) (3)
bərabərliyi ilə təyin olunur.
Ümumiyyətlə, tam artım xüsusi artımların cəminə bərabər olmur, yəni
Δz≠Δx z+Δ y z .
İstənilən sayda dəyişən kəmiyyətin funksiyasının xüsusi və tam artımları oxşar
qayda ilə təyin olunur.
Çox mühüm olan köməkçi bir anlayışı – nöqtənin ətrafı anlayışı verək. Mərkəzi M 0( x0 , y 0) nöqtəsində olan r radiuslu dairənin daxilində yerləşən bütün nöqtələr
çoxluğuna M 0( x0 , y 0) nöqtəsinin r radiuslu ətrafı deyilir.
Misal 1. İkidəyişənli z =x3sin y + y4 funksiyanın xüsusi törəmələrini tapın:
x dəyişənə görə xüsusi törəmə hesablayarkən y dəyişənini sabit kimi qəbul
etməliyik:
dzdx=3 x2sin y;
y dəyişəninə görə isə xüsusi törəmə hesablayarkən x dəyişənini sabit kimi qəbul
etməliyik:
dzdy
= x3cos y +4 y3.
Misal 2. Üçdəyişənli u = x6 – y4 +3z5 funksiyanın xüsusi törəmələrini tapın:
x dəyişənə görə xüsusi törəmə hesablayarkən y,z dəyişənlərini sabit kimi qəbul
etməliyik:
dudx
= 6x5;
y dəyişəninə görə isə xüsusi törəmə hesablayarkən x,z dəyişənlərini sabit kimi
qəbul etməliyik:
dudy = −4 y3;
z dəyişəninə görə isə xüsusi törəmə hesablayarkən x,y dəyişənlərini sabit kimi
qəbul etməliyik:
dudz
= 15z4.
4. Çoxdəyişənli funksiyaların tam artımı və limiti.
Tərif 1. Əgər istənilən e > 0 ədədinə görə elə r > 0 ədədi tapmaq olarsa ki, MM0<r bərabərsizliyinin ödəndiyi bütün M ( x , y ) nöqtələri üçün
|f ( x )−A|<ε
bərabərsizliyi doğru olsun, onda A ədədinə M ( x , y ) nöqtəsi M 0( x0 , y 0) nöqtəsinə
yaxınlaşdıqda f ( x , y ) funksiyasının limiti deyilir və belə işarə edilir:
lim ¿ x→ x ¿y→ y0 ¿
¿ f ( x , y )=A .¿
Tərif 2. Tutaq ki, M 0( x0 , y 0) nöqtəsi f ( x , y ) funksiyasının təyin oblastına
daxildir. Əgər M ( x , y ) nöqtəsi istənilən qayda ilə M 0( x0 , y 0) nöqtəsinə yaxınlaşdıqda
limx→ x0
y→ y0
f ( x , y )=f (x0 , y0)
olarsa, onda z= f ( x , y ) funksiyasına M 0( x0 , y 0) nöqtəsində kəsilməz funksiya
deyilir.
Oblastın bütün nöqtələrində kəsilməz funksiyaya həmin oblastda kəsilməz
funksiya deyilir.
Tərif 3. z= f ( x , y ) funksiyasının x-ə görə Δx z xüsusi artımının x artımına
nisbətini düzəldək. x sıfra yaxınlaşdıqda bu nisbətin limitinə həmin funksiyanın
x-ə nəzərən xüsusi törəməsi deyilir. z= f ( x , y ) funksiyanın x-ə nəzərən xüsusi
törəməsini
z x' , f x
' ( x , y ) , ∂ z∂ x
, ∂ f∂ x¿
simvollardan biri ilə işarə etmək olar. Beləliklə, tərifə əsasən
∂ z∂ x= lim
Δx→0
Δx zΔx= lim
Δx→0
f (x+Δx , y )−f (x , y )Δx
.
Oxşar qayda ilə Δ y z xüsusi artımının y-ə nisbətinin y sıfra yaxınlaşdıqda
limitinə z=f ( x , y ) funksiyasının y-ə nəzərən xüsusi törəməsi deyilir və
z y' , f y
' ( x , y ) , ∂ z∂ y
, ∂ f∂ y¿
simvollardan biri ilə işarə edilir. Beləliklə,
∂ z∂ y= lim
Δy→0
Δ y zΔy= lim
Δx→0
f ( x , y+Δy )−f ( x , y )Δy
.
Δx z artımını hesablayarkən y-in, Δ y z -i hesablayarkən isə x-in sabit saxlandığını
nəzərə alaraq, xüsusi törəmələrin tərifini belə vermək olar: z= f ( x , y )
funksiyasında y-i sabit fərz edərək, x-ə nəzərən hesablanmış törəməyə x-ə nəzərən
xüsusi törəmə deyilir. z= f ( x , y ) funksiyasında x-i sabit fərz edərək y-ə nəzərən
hesablanmış törəməyə y-ə nəzərən xüsusi törəmə deyilir.
Bu qaydadan aydındır ki, çoxdəyişənli funksiyanın xüsusi törəmələrinin tapılması
birdəyişənli funksiyanın törəməsinin tapılması qaydası kimidir, yalnız yadda
saxlamaq lazımdır ki, hansı dəyişənə nəzərən törəmə alınır.
Mövzu 25
Tam diferensial. İstiqamət üzrə törəmələr.
1. Yüksək tərtibli xüsusi törəmələr.
2. Tam diferensial anlayışı.
3. İstiqamət üzrə törəmələr.
4. Qradiyent anlayışı.
5. Teylor düsturu.
1. Yüksək tərtibli xüsusi törəmələr.
Tutaq ki, ikidəyişənli z= f ( x , y ) funksiyası verilmişdir. Ümumiyyətlə desək, ∂ z∂ x=f x
' ( x , y ) və
∂ z∂ y= f y
' (x , y ) xüsusi törəmələri x və y kəmiyyətlərinin
funksiyalarıdır. Ona görə də onlardan yenidən xüsusi törəmələr almaq olar.
Deməli, ikidəyişənli funksiyanın ikitərtibli xüsusi törəmələrinin sayı dörddür,
çünki ∂ z∂ x və
∂ z∂ y funksiyalarından hər birini həm x və həm də y arqumetlərinə
nəzərən diferensiallamaq olar: ∂2 z∂ x2=f xx
' ' ( x , y ); ∂2 z∂ x ∂ y
= f xy' ' ( x , y )
; ∂2 z∂ y ∂ x
=f yx' ' ( x , y )
; ∂2 z∂ y2=f yy
' ' ( x , y ). İkitərtibli törəmələri də yenə həm x, həm də y-ə nəzərən
diferensiallamaq olar. Onda üçtərtibli xüsusi törəmələr alarıq. Bunların sayı
səkkiz olar: ∂3 z∂ x3 ;
∂3 z∂ x2∂ y ;
∂3 z∂ x ∂ y ∂ x ;
∂3 z∂ x ∂ y2
; ∂3 z∂ y ∂ x2
;∂3 z
∂ y ∂ x ∂ y ; ∂3 z∂ y2∂ x ;
∂3 z∂ y3
. İstənilən n tərtibli
törəmə n−1 tərtibli törəmənin birinci törəməsidir.
2. Tam diferensial anlayışı.
z=f ( x , y ) funksiyası tam artımının tərifinə görə
Δz=f ( x+Δx , y+Δy)− f ( x , y ). (1)
Fərz edək ki, baxılan (x, y) nöqtəsində z=f ( x , y ) funksiyasının birinci tərtib
kəsilməz xüsusi törəməsi var. (1) bərabərliyinin sağ tərəfinə f (x, y + y) ifadəsini
əlavə edək və çıxaq:
Δz=[ f (x+Δx , y+Δy )−f ( x , y+Δy) ]+
+ [ f ( x , y+Δy )− f ( x , y )] . (2)
Hər bir kvadrat mötərizəyə Laqranj düsturunu tətbiq edək.
f ( x+Δx , y+Δy)−f ( x , y+Δy )=∂ f ( x , y+Δy )
∂ xΔx
,
(3)
burada x ədədi x ilə x +x arasındadır;
f ( x , y+Δy )−f ( x , y )=∂ f ( x , y )
∂ yΔy
, (4)
burada y ədədi y ilə y +y arasındadır.
(3) və (4) ifadələrini (2) bərabərliyində yerinə yazaq:
Δz=∂ f ( x , y+Δy )
∂ xΔx
+ ∂ f ( x , y )∂ y
Δy. (5)
Fərziyyəyə görə xüsusi törəmələr kəsilməz olduqlarından
lim
Δx→0Δy→0
∂ f ( x , y+Δy )∂ x
=∂ f ( x , y )∂ x
,
limΔx→0Δy→0
∂ f ( x , y )∂ y =
∂ f ( x , y )∂ y .
(6)
Limitin tərifinə əsasən (6) bərabərsizliklərini
∂ f ( x , y+Δy )
∂ x=∂ f ( x , y )∂ x
+γ1 ,
∂ f ( x , y )∂ y =
∂ f ( x , y )∂ y +γ2 (6)
şəklində yazmaq olar; burada x və y sıfra yaxınlaşanda 1 və 2 da sıfra
yaxınlaşır. (6) bərabərsizliklərinə əsasən (5) münasibəti
Δz=[∂ f ( x , y )
∂ xΔx+ ∂ f ( x , y )
∂ yΔy ]+ [γ1 Δx+γ2 Δy ]
(7)
şəklini alar.
Birinci iki həddin cəmi x və y kəmiyyətlərinə nəzərən xəttidir. Bu cəm z
artımından sonsuz kiçilən qədər fərqlənməklə, həmin artımın baş hissəsini təşkil
edir.
Tərif. Verilmiş (x, y) nöqtəsindəki z tam artımı aşağıdakı kimi iki həddin
cəmi şəklində göstərilə bilən z=f ( x , y ) funksiyasına həmin nöqtədə diferensiallana
bilən funksiya deyilir; burada hədd adlandırdığımız birinci ifadə x və y artım-
larına nəzərən xəttidir, ikinci hədd isə yüksəktərtibli sonsuz kiçiləndir. Tam
artımın xətti hissəsinə funksiyanın tam diferensialı deyilir və dz yaxud df ilə
işarə edilir
dz= f x' ( x , y )Δx+f y
' ( x , y )Δy .
Sərbəst dəyişənlərin x və y artımlarını x və y dəyişənlərinin diferensialları
adlandıraq və uyğun olaraq dx və dy ilə işarə edək. Bu halda tam diferensialın
ifadəsi
dz= ∂ f
∂ xdx+ ∂ f
∂ ydy
(8)
şəklini alar.
Bir neşə misala baxaq.
Misal 1. z = x y ikidəyişənli funksiyasının tam diferensialını tapın.
Xüsusi törəmələrin tərifinə görə (8) düsturunu nəzərə alaraq:
dz = (yx y – 1) dx + (x y ln x) dy.
Misal 2. z = x2y ikidəyişənli funksiyasının tam diferensialını tapın.
Xüsusi törəmələrin tərifinə görə (8) düsturunu nəzərə alaraq:
dz = (2xy) dx + (x2)dy.
Misal 3. z = yx ikidəyişənli funksiyasının x=2, y=1, dx=0.1, dy=0.2, şərtlərinə
görə tam diferensialını tapın.
dz = − yx2 dx + 1
xdy
dz = −14
· 110+1
2· 210 = 0.075
Misal 4. z = xy funksiyası üçün x=5, y=4, ∆x=dx=0.1, ∆y=dy=−0.2, şərtlərinə
görə funksiyanın ∆z tam artımını və dz tam diferensialını hesablayın:
Bu törəmələri sıfra bərabər etsək, verilmiş funksiyanın böhran nöqtələrini taparıq:
x3−x+ y=0 ,y3+ x− y=0 .
Buradan x3+ y3=0 , yəni y3=−x3
və beləliklə, y=−x . Bunu birinci tənlikdə
nəzərə alsaq, x3−2 x=0 ; x ( x2−2 )=0 . Buradan tapırıq ki, x1=0 , x2=√2 ,x3=−√2
Onda y1=0 , y2=−√2 , y3=√2 olur.
Beləliklə, verilən funksiyanın üç böhran nöqtəsi var: M 1(0,0 ), M 2(√2 ,−√2) , M 3(−√2 ,√2 ). Kafi şərtlərin köməyi ilə bu nöqtələrdə ekstremumun varlığını
yoxlayaq. Bunun üçün əvvəlcə ikinci tərtib xüsusi törəmələri tapaq:
Oxy müstəvisində L xətti ilə əhatə olunmuş qapalı* D oblastı göstərək.
Tutaq ki, D oblastında
z = f (x, y)
kəsilməz funksiyası verilmişdir.
D oblastını istənilən qayda ilə xətlər çəkərək n hissəyə bölək (şəkil 1):
∆s1 , ∆s2 , ... , ∆sn ;
bu parçaları hissəciklər adlandıracağıq. Yeni simvollar (işarələr) işlətməmək üçün həmin hissəciklərin sahələrini də, onların adları kimi, uyğun olaraq
∆s1 , ∆s2 , ... , ∆sn ilə işarə edəcəyik. Hər bir ∆si hissəciyində (daxilində və ya sərhədində) istənilən Pi nöqtəsi götürək; onda n nöqtə götürmüş olaraq
P1 , P2 , ... , Pn .
y
Şəkil - 1
0 x
Verilmiş funksiyanın həmin seçilmiş nöqtələrindəki qiymətlərini uyğun olaraq
f (P1), f (P2), ..., f (Pn) ilə işarə edək və f (Pi) ∆si hasillərinin cəminə düzəldək:
Vn = f (P1) ∆s1 + f (P2) ∆s2 + ... + f (Pn) ∆sn = ∑i=1
n
f (Pi)∆ si. (1)
Bu cəmə f (x, y) funksiyasının D oblastında inteqral cəmi deyilir.
D oblastında f ≥ 0 olarsa, cəmin f (Pi) ∆si toplananlarından hər birini həndəsi
olaraq, oturacağı ∆si və hündürlüyü f (P1) olan kiçik bir silindrin həcmi kimi
təsəvvür etmək olar.
Vn cəmi həmin kiçik (elementar) silindrlərin həcmləri cəmindən, yəni “pilləli”
cismin həcmindən ibarət olur (şəkil 2).
Verilmiş D oblastını müxtəlif qaydalarla ∆si hissələrinə bölək və f (x, y)
funksiyası üçün həmin bölgülərə uyğun düzəldilmiş inteqral cəmlərinin istənilən
ardıcıllığını götürək:
V n1,V n2
, …, V nk, … (2)
Şəkil – 2 Şəkil - 3
Fərz edəcəyik ki, nk → ∞ şərtində ∆si hissəciklərinin diametrlərindən ən böyük sıfra yaxınlaşır. Bu şərtlər daxilində, isbatsız verdiyimiz aşaöıdakı təklif doğru olur.
Teorem 1. Tutaq ki, ∆si hissəciklərinin diametrlərindən böyüyü sıfra yaxınlaşır (deməli n→ ∞); onda f (x,y) funksiyası D qapalı oblastında kəsilməz olarsa, (1) inteqral cəmlərinin (2) ardıcıllığının limiti vardır. Bu ədəd olur, yəni həmin limit, D oblastının ∆si hissəciklərinə bölünməsi qaydasında və eləcə də ∆si
hissəcikləri üzərində Pi nöqtələrinin seçilişindən asılı deyildir.
Bu limitə f (x,y) funksiyasının D oblastı üzrə ikiqat inteqralı deyilir və belə işarə olunur:
∫ D∫ f (P )ds yaxud ∫ D∫ f ( x , y )dx dy ,
yəni
limdiam ∆si →0
∑i=1
n
f (Pi¿¿)∆ si= ∫ D .¿¿
Burada D oblastını inteqrallama oblastı deyilir.
z = f (x,y) səthi ilə yuxarıdan, z = 0 müstəvisi ilə aşağıdan və yönəldicisi L xəttindən ibarət, doğuranları isə Oz oxuna paralel olan silindrik səth ilə yanlardan əhatə olunmuş cismin həcmini Q ilə işarə edək (şəkil 3). f (x , y )≥ 0 olarsa, f (x , y ) funksiyasının D oblastı üzrə ikiqat inteqralı həmin cismin Q həcminə bərabərdir.
İkiqat inteqral haqqında aşağıdakı teoremləri verək.
Teorem 2. İki funksiyanın φ(x, y) + ϕ(x, y) cəminin D oblastı uzrə ikiqat inteqralı, həmin funksiyaların ayrı-ayrılıqda D üzrə ikiqat inteqrallarının cəminə bərabərdir:
∫ D∫ [φ (x , y )+ϕ(x , y )]ds= ∫ D∫φ (x , y )ds+¿ ∫ D∫ϕ ( x , y )ds .¿
Teorem 3. Sabit vuruğu ikiqat inteqral işarəsi xaricinə cıxarmaq olar:
∫ D∫a φ ( x , y )ds=a ∫ D∫φ ( x , y ) ds ,
D1 D2
y = φ2(x)
M1 M2
a - sabitdir.
y
Şəkil - 4
0 x
Bu teoremlərinin hər ikisinin isbatı, müəyyən inteqralın uyğun xassələrinin isbatı kimidir.
Teorem 4. D oblastı iki D1 və D2 oblastlarına ayrılmışdırsa (bunların ortaq daxili nöqtələri yoxdur) və f (x,y) funksiyası D oblastının bütün nöqtələrində kəsilməzdirsə, onda
∫ D∫ f ( x , y )dxdy=∫ D1∫ f ( x , y )dxdy+¿ ∫ D2∫ f ( x , y )dxdy .¿
2. İkiqat inteqralın hesablanması.
Oxy müstəvisi üzərində bir D oblastı götürək; bu oblast elədir ki, onun daxili nöqtəsindən keçən və koordinat oxlarından birinə paralel olan hər bir düz xətt onun sərhədini yalnız iki nüqtədə kəsir. Məsələn, tutaq ki, Oy oxuna paralel düz xətt onun sərhədini N1 və N2 nöqtəsində kəsir (şəkil 1).
Bu hal üçün fərz edək ki, həmin D oblastı Oy, y = φ1(x), y = φ2(x), x = a, x = b xətləri ilə əhatə olunmuşdur, bundan başqa
φ1(x) φ2(x), a<b
və φ1(x), φ2(x), funksi-
y yaları [a , b ] parçasında
N2 kəsilməzdir.Belə oblas -
tı biz Ox oxu istiqamə-
D tində düzgün oblast ad-
N1 landıracağıq. Ox oxu
istiqamətində düzgün
0 a x b x oblast da buna oxşar
Şəkil - 1
qayda ilə təyin edilir.
Həm Ox, həm də Oy oxu istiqamətində düzgün oblasta sadəcə olaraq düzgün oblast deyilir.
1 – ci şəkildə məhz düzgün oblast verilmişdir. Tutaq ki, f (x,y) funksiyası D oblastında kəsilməzdir.
İki ardıcıl inteqralı olan
I D=∫a
b
¿¿
ifadəsinə baxaq. Bu ifadə biz f ( x , y ) funksiyasının D oblastında təkrar inteqralı deyəcəyik. Bu ifadə əvvəlcə mötərizədəki inteqral x - ə sabit kimi baxmaqla
y - ə nəzərən hesablanır. Bunun nəticəsində x – dən asılı kəsilməz funksiya alınır:
Ф(x) = ∫φ1(x)
φ2(x)
¿¿.
Sonra bu funksiyanı a ilə b arasında x-ə nəzərən inteqrallayırlar:
I D=∫a
b
Ф ( x )dx .
Nəticədə müəyyən sabit ədəd adlanır.
Dy =
x2
y = φ2(x)
φ1(x) = φ(x)φ1(x) = χ(x)
Misal 1. Aşağıdakı təkrar inteqralı hesablamalı:
I D=∫0
1
(∫0
x2
( x2+ y2 )dy )dx .
Əvvəlcə daxili (mötərizə içərisindəki) inteqralı hesablamaq lazımdır:
Ф(x) = ∫0
x2
(x2+ y2 )dy=(x2 y+ y3
3 )0x2
=x2 x2+¿¿ .
Aldığımız funksiyanı 0 ilə 1 arasında inteqrallayaq:
∫0
1
(x4+ x6
3 )dx=( x5
5+ x7
3 ·7 )01
=15+ 1
21= 26
105 .
Bu misaldakı D oblastını təyin edək. Həmin D oblastı:
y = 0, x = 0, y = x2, x = 1
xətləri ilə əhatə olunmuşdur (şəkil 2).
y y
D
0 i x 0 a c b x
Şəkil – 2 Şəkil – 3
D oblastı elə ola bilər ki, y = φ1(x), y = φ2(x) funksiyalarından biri x arqumentinin dəyişdiyi bütün interval boyunca (x = a ilə x = b arasında) bir analitik ifadə vasitəsi bilməsin Məsələn, tutaq ki, a<c<b və
[a , c ] parçasında φ1(x) =ϕ(x) ,
[c ,b ] parçasında φ1(x) =χ (x),
burada ϕ(x) və χ (x) – analitik şəkildə verilmiş funksiyalardır (şəkil 3). Bu halda təkrar inteqral aşağıdakı kimi yazılır:
∫a
b
¿¿
+∫c
b
¿¿
+∫c
b
¿¿
Bu bərabərliklərdən birincisi müəyyən inteqralın məlum xassəsinə əsasən yazılmışdır, ikincisi isə ona görədir ki, [a , c ] parçasında φ1≡ ѱ (x) və [c ,b ] parçasında isə φ1≡ χ (x).
φ2( x) funksiyası [a , b ] parçasının müxtəlif hissələrində müxtəlif analitik ifadələrlə verilmiş olduğu halda da təkrar inteqral oxşar qayda ilə parçalanıb yazılardı.
ρ=ρ2(φ)
ρ=ρ1(φ)
0 β φ α ρ
Polyar koordinatlarda ikiqat inteqral.
Tutaq ki, (φ, ρ) polyar koordinat sistemində D oblast verilir ki; o, φ = φi = const
şualar və ρ = ρi = const mərkəzləri O(0, 0) nöqtədə yerləşən konsentrik çevrələrlə hissələrə bölünür. Belə olan halda, D oblastı üzrə f (M) funksiyanın ikiqat inteqralı:
∫ D∫ f (M ) ds= ∫ D∫ f (φ , ρ )ρdydρ= ∫ D∫F ( fφ , ρ )dydρ
kimi hesablanır. Həmin inteqralın hesablanması zamanı
∫α
β
dy ∫ρ1(φ)
ρ2(φ)
F (φ , ρ )dρ
təkrar inteqraldan istifadə edilir.
Burada α və β – φ-nın D oblastı üzrə ən kiçik və ən böyük qiymətləridir.
Çox hallarda axtarılan kəmiyyət öncə dekart koordinatlarının köməyi ilə ifadə olunmuş ikiqat inteqralın köməyi ilə təmsil olunur və daha sonra hesablamaları sadələşdirmək məqsədilə polyar koordinatlara çevrilir. Həmin keçidi aşağıdakı münasibətlərə əsasən aparıllar:
x=ρ cosφ
y=ρ sinφ
dx dy=ρ·dydρ .
Misal. D oblastı ρ=a , φ= π2 və φ=π xəttləri ilə məhdudlaşdırılmış dairəvi
Həmin oblastı qurmaq üçün ρ=a çevrəsini və φ=π2 ; φ=π bucaqlarını quraraq
mərkəzi O-da yerləşən OAB dairəvi sektor alırıq.
φ=π2
φ=π a 0 ρ
Xarici inteqralı φ - ə görə φ∈[ π2 , π ] götürəcək¿>¿
I=∫π2
π
sin φ dy∫0
a
ρ dρ=∫π2
π
sin φ(12 ρ2 a0)dφ
¿∫π2
π
( a2
2 )sin φ dφ=a2
2(−cos φ
ππ2¿¿)=
a2
2(1−0 )=a2
2. ¿¿
3. Sahə və həcmlərin ikiqat inteqralın köməyi ilə
hesablanması.
Həcm. Məlumdur ki, z=f (x , y ) səthi, z=0 müstəvi və yönəldicisi D oblastının sərhədi, doğuranı Oz oxuna paralel düz xətt olan silindrik səth ilə əhatə olunmuş cismin V həcmi ikiqat inteqrala bərabərdir:
V= ∫ D∫ f ( x , y ) ds ,
burada f (x , y ) mənfi olmayan funksiyadır.
Misal 1. x = 0, y = 0, x + y + z = 1, z = 0 müstəviləri ilə əhatə olunmuş cismin həcmini hesablamalı (şəkil 1).
V= ∫ D∫ (1−x− y )dy dx ,
burada D oblastı, 1-ci şəkildəki ştrixlənmiş üçbucaqdır. Bu üçbucaq Oxy müstəvisində yerləşir və x = o, y = 0, x + y = 1 düz xətləri ilə əhatə olunmuşdur. İkiqat inteqralın sərhədlərini təyin edərək hesablayaq:
V=∫0
1
∫0
1− x
(1−x− y )dy dx=∫0
1
[(1−x ) y− y2
2 ]01−x
dx=¿
¿∫0
1 12(1−x)2 dx=1
6.
Deməli, V = 16 kub vahid.
Qeyd 1. Həcmi axtarılan cisim yuxarıdan və aşağıdan uyğun olaraq
z=Ф2 ( x , y )≥ 0 , z=Ф1(x , y )≥ 0 səthlərinin müəyyən hissələri ilə əhatə olunmuşdursa, bundan başqa, hər iki hissənin Oxy müstəvisi üzərində proyeksiyası D oblastında ibarətdirsə, belə cismin V həcmi iki “silindrik” cismin həcmləri fərginə bərabərdir: birinci silindrik cismin oturacağı D oblastı, yuxarıdan z=Ф2 ( x , y ) səthi ilə hüdudlanır; ikinci silindrik cismin oturacağı yenə D oblastıdır, yuxarıdan isə z=Ф1(x , y) səthi ilə məhduddur (şəkil 2). Buna görə V həcmi ikiqat inteqralın fərqinə bərabərdir:
V= ∫ D∫Ф2 ( x , y )ds−¿ ∫ D∫Ф1 ( x , y )ds¿
yaxud
V= ∫ D∫ [Ф2 ( x , y )−Ф1 ( x , y ) ]ds . (1)
Şəkil –1 Şəkil –2
Asanlıqla göstərmək olur ki, (1) düsturu ϕ1(x , y ), ϕ2(x , y ) funksiyaları yalnız mənfi olmadıqda deyil,
ϕ1(x , y )≥ ϕ1(x , y)
bərabərsizliyini ödəyən istənilən kəsilməz funksiyalar olduqda da doğrudur.
Qeyd 2. D oblastında f (x, y) funksiyası işarəsini dəyişirsə, onu iki hissəyə bölmək lazımdır:
Şəkil –3
1) D1 oblastı, burada f ( x , y )≥ 0 ; 2) D2 oblastı, burada isə f ( x , y )≤ 0. D1, D2 oblastları elədir ki, bunlar üzrə ikiqat inteqralların olduğunu fərz edək. Onda D1
oblastı üzrə ikiqat inteqral müzbət ədəd olmaqla Oxy müstəvisindən yuxarıda
yerləşən cismin həcminə bərabər olar. D2 oblastı üzrə ikiqat inteqral mənfi qiyməti Oxy mestəvisindən aşağıda yerləşən cismin həcminə bərabərdir. Deməli, D üzrə ikiqat inteqral həmin həcmlərin fərqinə bərabərdir.
Müstəvi fiqurun sahəsinin hesablanması. f ( x , y )≡ 1 funksiyası üçün D oblastı üzrə inteqral cəmi düzəltsək, istənilən bölgüdə bu cəm həmin oblastın S sahəsinə bərabərdir.
S=∑i=1
n
1· ∆ si.
Bu bərabərliyin sağ tərəfində limitə keçərək ikiqat inteqral alırıq:
S= ∫ D∫ dx dy.
D oblastı düzgündürsə, sahə
S=∫a
b ( ∫Ф1 (x)
Ф2 (x)
dy )dx
təkrar inteqralı ilə ifadə olunar. Mötərizə içərisindəki inteqrallamanı aparsaq, aşkardır ki,
S=∫a
b
[Ф2 ( x )−Ф1(x)]dx
alırıq.
Misal 2. Tənlikləri
y=2−x2 , y=x
olan xətlərlə əhatə olunmuş fiqurun sahəsini hesablamalı.
Verilmiş xətlərin kəsişmə nöqtələrini təyin edək (şəkil 3). Kəsişmə nöztəsində ordinatlar bərabər olduqundan tənliklərinin sağ tərəfləri də bərabər olar, yəni
y=2−x2
buradan
x2+ x−2=0 ; x1=−2 , x2=1.
Biz iki kəsişmə nöztəsi alırıq: M 1 (−2 ;−2 ) , M 2 (1;1 ) .
İkiqat inteqrallar bir sıra mexaniki və fiziki kəmiyyətlərin hesablanmasına geniş tətbiq edilir.
Maddi müstəvi fiqurun kütləsi. Tutaq ki, σ , (Oxy) müstəvisi üzərində yerləşən maddi müstəvi fiqur və μ(x , y) onun səthi sıxlığıdır. μ(x , y) funksiyası σ oblastında kəsilməyəndir.
σoblastında paylanmış kütləni tapmaq üçün onu hər hansı qayda ilə σ 1 , σ2 , …σn kimi kiçik hissələrə bölək. Bu hissələrin sahəsini ∆σ k (k=1, 2, ..., n) ilə işarə etsək, onda σ k hissəsində paylanmış kütlənin miqdarı təqribi olaraq μ(xk , yk) · ∆σ k hasilinə bərabər olar. Burada (xk , y k) ilə σ khissəsində yerləşən hər hansı nöqtə işarə edilmişdir: (xk , y k)⋳σ k (k=1, 2, ..., n).
Bu halda, σ maddi müstəvi fiqurunda paylanmış kütlənin miqdarı təqribi olaraq
m ≈∑k=1
n
μ (xk , yk ) ∆σ k (1)
cəminə bərabər olar. Sağ tərəfdəki cəm μ(x , y) funksiyasının σ oblastında inteqral cəmidir. (1) bərabərliyində, σ 1 , σ2 , …σn bölgüsünün λ parametrinin sıfra yaxınlaşması şərtində limitə keçdikdə σ oblastında paylanmış kütlə miqdarının dəqiq qiyməti alınır:
m=limλ →0∑k=1
n
μ(xk , yk) · ∆ σk
və ya
m= ∫ σ∫ μ ( x , y ) dσ . (2)
Maddi müstəvi fiqurun ağırlıq mərkəzinin koordinatları. Burada da fərz edək ki, (Oxy) müstəvisində yerləşən σ maddi müstəvi fiqurunun səthi sıxlığı kəsilməyən μ(x , y) funksiyasıdır ( μ(x , y) ilə σ oblastının (x , y ) nöqtəsində sıxlığı işarə edilir). σ oblastını σ 1 , σ2 , …σn kimi kiçik hissələrə bölək və bu hissələrin sahəsini uyğun olaraq ∆σ k (k=1, 2, ..., n) ilə işarə edək. Hər bir σ k hissəsində bir (xk , y k)⋳σ k (k=1, 2, ..., n) nöqtəsi götürək və fərz edək ki, σ k hissəsində paylanmış kütlə təqribən μ(xk , yk) ∆σ k ədədinə bərabər olub, həmin (xk , y k) nöqtəsində yerləşir. Onda σ maddi mustəvi fiquruna n dənə maddi nöqtələr sistemi kimi baxmaq olar. Bu sistemin ağırlıq mərkəzinin koordinatları σ fiqurunun ağırlıq mərkəzinin korrdinatlarına təqribən bərabər olar:
x A ≈∑k=1
n
xk μ(xk , yk)∆ σ k
∑k=1
n
μ(xk , yk)∆ σk
, y A ≈∑k=1
n
yk μ (xk , yk)∆ σk
∑k=1
n
μ(xk , yk)∆ σ k
.
Bu bərabərliklərdə σk bölgüsünün λ parametri sıfra yaxınlaşdıqda limitə keçsək və (2) bərabərliyini nəzərə alsaq, σ maddi müstəvi fiqurunun ağırlıq mərkəzi koordinatlarını hesablamaq eçen dəqiq düsturlar alınır:
x A=∫ σ∫ xμ ( x , y )dσ
∫ σ∫ μ ( x , y )dσ , y A=
∫ σ∫ yμ (x , y )dσ
∫ σ∫ μ ( x , y )dσ . (3)
Kəsrlərin sürətindəki
M y= ∫ σ∫ xμ ( x , y )dσ
və
M y= ∫ σ∫ yμ ( x , y )dσ
əfadələrinə σ maddi müstəvi fiqurunun uyğun olaraq Oy və Ox oxlarına nəzərən statik momenti deyilir.
Maddi müstəvi fiqurun ətalət momenti. Kütləsi m olan maddi M nöqtəsinin hər hansı oxa nəzərən ətalət(inersial) momenti həmin nöqtənin oxdan olan r məsafəsinin kvadratı ilə t kütləsinin hasilinə deyilir:
J0=mr2 .
Kütlələri m ,m, …mn olan maddi M 1 , M 2 ,… M n nöqtələri sisteminin hər hansı oxa nəzərən ətalət momenti, nöqtələrinin həmin oxa nəzərən ətalət momentlərinin cəminə deyilir. Beləliklə,
J0=∑k=1
n
mk r k2. (4)
(Oxy) müstəvisində yerləşən və səthi sıxlığı kəsilməyən μ(x , y) funksiyası olan σ maddi müstəvi fiqurunun (Ox) və (Oy) oxlarına nəzərən ətalət momentini tapmaq üçün həmin fiquru σ 1 , σ2 , …σn kimi elementar hissələrə bölək. Bu hissələrin sahəsini ∆ σ1 , ∆ σ2 ,… ∆ σn ilə işarə edək və hər bir σ k hissəsi üzərində yerləşən bir (xk , y k)⋳σ k (k=1, 2, ..., n) nöqtəsi götürək. σ k hissəsinin kütləsi təqribən μ(xk , yk)⨯∆ σ k olduğunu fərz edək, həmin kütlənin (xk , y k) nöqtəsində yerləşdiyini qəbul edək. Onda σ maddi vuruğu əvəzinə n dənə maddi nöqtələr sistemi alınır. Bu sistemin (Oy) oxuna nəzərən ətalət momenti
∑k=1
n
xk2 μ(xk , y k)∆ σ k (5)
cəminə bərabərdir. (2) cəmini σ maddi müstəvi fiqurunun (Oy) oxuna nəzərən ətalət momentinin təqtibi qiyməti hesab etmək olar. (2) bərabərliyində λ → 0 şərtində (λ ilə σk bölgüsünün parametri işarə edilmişdir) limitə keçdikdə σ maddi müstəvi fiqurunun (Oy) oxuna nəzərən ətalət momenti alınır:
J y= ∫ σ∫ x2 μ (x , y )dσ. (6)
Anoloji olaraq σ maddi müstəvi fiqurunun (Ox) oxuna nəzərən ətalət momentinin
J x=∫ σ∫ y2 μ(x , y)dσ (7)
düsturu ilə təyin olunduğunu göstərmək olar.
Nöqtənin, nöqtələr sisteminin və maddi müstəvi fiqurunun koordinat başlanğıcına nəzərən ətalət momentindən də danışmaq olar. Kütləsi m olan maddi M(x, y) nöqtəsinin koordinat başlanğıcına nəzərən ətalət momenti
J=m( x2+ y2)
ifadəsinə deyilir. σ maddi müstəvi fiqurunun koordinat başlanğıcına nəzərən ətalət momenti
J= ∫ σ∫(x2+ y2)μ (x , y )dσ
və ya
J=J x+J y .
Mövzu 28
Üçqat inteqral və onun tətbiqi.
1. Üçqat inteqral anlayışı.
2. Üçqat inteqralın hesablanması.
3. Cismin ətalət momenti, kütlə və ağırlıq mərkəzin
koordinatları.
1. Üçqat inteqral anlayışı.
İkiqat inteqralın tərifi müstəvi fiqurların sahəsi anlayışına əsaslandığı kimi, üçqat inteqralın tərifi də fəzada cisimlərinin (fiqurlarının) həcmi anlayışına əsaslanır.
Bundan sora baxdığımız bütün fəza oblastlarının və ya cisimlərinin sonlu həcmi olduğunu (kubların olduğunu) fərz edirik.
Tutaq ki, W=f ( x , y , z ) funksiyası (Oxyz) fəzasının qapalı və kublanan V oblastında təyin olunmuşdur. V oblastını hər hansı qayda ilə ortaq daxili nöqtəsi olmayan V 1 ,V 2 , …V n elementar hissələrə bölək. V oblastının göstərilən şəkildə bölgüsünü T, bölgüdən alınan V k (k = 1, 2,..., n) hissələrinin uyğun olaraq həcmini ∆V k (k = 1, 2,..., n) və diametrini dk (k = 1, 2,..., n) ilə işarə edək. T bölgüsünün parametri λ=λ(T) olsun:
λ=λ(T) = max(d1 , d2 ,…dn).
Hər bir V k hissəsində ixtiyari bir X k=(ξk , ηk , τ k ) nöqtəsi götürək və aşağıdakı kimi cəm düzəldək:
Jn (T )=∑k=1
n
f (ξk ,ηk , τ k)∆ V k. (1)
Bu cəmin qiyməti V oblastının T bölgüsündən və (ξk , ηk , τk ) nöqtələrinin seçilməsindən asılıdır. (1) cəminə f funksiyasının V oblastında inteqral cəmi deyilir. Hər bir f funksiyası üçün verilmiş V oblastında sonsuz sayda inteqral cəmi düzəltmək olar.
Tərif. (1) inteqral cəminin λ(T)→ 0 şərtinə
J=limλ→ 0∑k=1
n
f (ξk , ηk , τ k)∆ V k
limiti varsa, onda f funksiyasına V oblastında inteqrallanan funksiya, J ədədinə isə onun V oblastında üçqat inteqralı deyilir və ∫ ∫ V∫ f ( x , y , z )dV (və ya ∫ ∫ V∫ f ( x , y , z )⨯dx dy dz¿¿ ilə işarə edilir:
∫ ∫ V∫ f ( x , y , z )dV=limλ→ 0∑k=1
n
f (ξk , ηk , τ k )∆ V k . (2)
Burada f inteqralaltı funksiya, V inteqrallama oblastı, x, y, z inteqrallama dəyişənləri və dV (və ya dV = dx dy dz) həcm elementi adlanır. Tərifdən aydındır ki, f ( x , y , z )≡ 1 olduqda üçqat inteqralın qiyməti V inteqrallama oblastının həcminə (biz V oblastının həcmini də V ilə işarə edirik) bərabərdir:
V=∫ ∫V∫dV=∫ ∫
V∫dx dy dz .
Üçqat inteqralın əsas xassələri:
Xassə 1. (xəttilik). V oblastında inteqrallanan sonlu sayda f 1 , f 2 , … f n funksiyaların xətti kombinasiyası da həmin oblastda inteqrallanandır və sabit C1 , C2 , …Cn ədədləri üçün
∫ ∫ V∫ [∑k=1
n
C k f k (x , y , z)] dV=∑k=1
n
C k∫ ∫ V∫ f k (x , y , z )dV (3)
bərabərliyi doğrudur.
Xassə 2. (additivlik). f funksiyası V oblastında inteqrallanarsa və V oblastı ortaq daxili nöqtələri olmayan V 1 ,V 2 ,…V n oblastlarının birləşməsindədirsə, onda
həmin funksiya V k (k = 1, 2,..., n) oblastlarının hər birində də inteqrallanandır və
∫ ∫V∫ f ( x , y , z )dV=∫ ∫
V 1∫ f (x , y , z )dV +…+∫ ∫
V n∫ f ( x , y , z )dV (4)
bərabərliyi doğrudur.
Xassə 3. (monotonluq). V oblastında inteqrallanan f və φ funksiyaları üçün həmin oblastın bütün nöqtələrində f ( x , y , z )≤ φ (x , y , z ) bərabərsizliyi ödənilirsə, onda onların inteqralları üçün də həmin bərabərsizlik ödənilər:
∫ ∫V∫ f ( x , y , z )dV ≤∫ ∫
V∫φ ( x , y , z )dV , (5)
yəni bərabərsizliyi verilmiş oblast inteqrallamaq olar.
Xüsusi halda, V oblastında f ( x , y , z )≥ 0 olduqda
∫ ∫V∫ f ( x , y , z )dV ≥ 0,
f ( x , y , z )≤ 0 olduqda isə
∫ ∫V∫ f ( x , y , z )dV ≤ 0
olar.
Xassə 4. f funksiyası σ oblastında inteqrallanandırsa, onun mütləq qiyməti də həmin oblastda inteqrallanandır və
|∫ ∫ V∫ f ( x , y , z )dV|≤∫ ∫ V∫|f ( x , y , z )dV|dV (6)
bərabərsizliyi doğrudur.
Xassə 5. V oblastında inteqrallanan f və φ funksiyalarının hasili də hımin oblastda inteqrallanandır.
Xassə 6. (orta qiymət teoremi). f funksiyası qapalı məhdud V oblastında kəsilməyən, φ funksiyası isə inteqrallanan və öz işarəsini dəyişməyən funksiyadırsa, onda həmin oblastın elə ( 𝜉, η, τ ) ⋳ V nöqtəsi var ki,
∫ ∫V∫ f ( x , y , z )φ ( x , y , z )dV=f (ξ , η , τ)∫ ∫
V∫φ (x , y , z )dV (7)
bərabərliyi ödənilir.
Xüsusi halda, φ ( x , y , z )≡ 1(( x , y , z )⋳V ) olduqda (7) bərabərliyindən
∫ ∫ V∫ f ( x , y , z )dV=f (ξ ,η , τ ) ·V (8)
münasibəti alınır.
2. Üçqat inteqralın hesablanması.
İkiqat inteqrallar kimi, üçqat inteqrallar da təkrar inteqrallara gətirilərək hesablanır. Nəticədə üçqat inteqralın hesablanması üç dənə müəyyən (birqat) inteqralın hesablanmasına gətirilir.
Əvvəlcə fərz edək ki, V inteqrallama oblastı paralelepipeddir:
R=R (a ≤ x≤ b , c ≤ y ≤ d ,e ≤ z ≤ g ) . (1)
f ( x , y , z ) funksiyası R paralelepipedində kəsilməyəndirsə, onda onun ∫ ∫ R∫ f (x , y , z )dV üçqat inteqralı var və σ (a≤ x ≤ b , c≤ y≤ d ) düzbucaqlısı üzrə götürülmüş ikiqat inteqral və [e , g ] parçası üzrə götürülmüş müəyyən inteqral vasitəsilə aşağıdakı kimi işadə olunur:
∫ ∫ R∫ f (x , y , z )dV= ∫ σ∫ [∫e
g
f ( x , y , z )dz ]dx dy=¿
¿ ∫ σ∫dx dy∫e
g
f ( x , y , z )dz . (2)
(“) bərabərliyindəki ikiqat inteqralı təkrar inteqral şəklində yazdıqa (1) paralelepipedi üzrə götürülmüş üçqat inteqralın hesablanma düsturu alınır:
∫ ∫ R∫ f (x , y , z ) dV=∫a
b
dx∫c
d
dy∫e
g
f ( x , y , z )dz . (3)
Əyrixətli oblastlar üzrə götürülmüş üçqat inteqralı da təkrar inteqral şəklində gətirmək olar.
Fərz edək ki, z=h (x , y ) və z=H (x , y) funksiyaları σ oblastında kəsilməyəndir. Aşağıdan z=h (x , y ) səthi, yuxarıdan z=H (x , y) səthi və yanlardan doğuranı (Oz) oxuna paralel olan silindrik səthlə hüdudlanmış oblastı V ilə işarə edək (şəkil 1). Onda məhdud qapalı V oblastında kəsilməyən hər bir f ( x , y , z ) funksiyası üçün
∫ ∫V∫ f ( x , y , z )dV=¿ ∫ σ∫ [ ∫f (x , y)
H (x , y)
f ( x , y , z )dz]dx dy ¿ (4)
düsturu doğrudur. (4) bərabərliyini
∫ ∫ V∫ f ( x , y , z )dV=¿ ∫ σ∫ dx dy ∫f ( x, y)
H (x , y)
f ( x , y , z ) dz¿ (5)
kimi yazılır. (5) düsturu üzrə üçqat inteqralı hesabladıqda, Əvvəlcə x və y dəyişənlərini sabit hesab edərək, z dəyişəninə görə daxilindəki inteqralı hesablamaq, sonra da σ oblastı üzrə x, y dəyişənlərinə görə ikiqat inteqralı hesablamaq lazımdır. V oblastının (Oxy) müstəvisi üzərinə proyeksiyası olan σ
Şəkil – 1
oblastının quruluşundan asılı olaraq (5) düsturundakı ikiqat inteqralı da təkrar inteqral şəklində yazmaq olar.
Tutaq ki, σ oblastı aşağıdan y=φ(x ) əyrisi, yuxarıdan y=ψ ( x) əyrisi və yanlardan x = a və x = b düz xətləri ilə hüdudlanmış oblastdır. Onda (5) düsturundakı ikiqat inteqralı da təkrar inteqral şəklində yazmaq olar:
∫ ∫ V∫ f ( x , y , z )dV=¿∫a
b
dx ∫φ(x)
ψ (x)
dy ∫f (x , y )
H (x , y)
f ( x , y , z )dz .¿ (6)
Misal 1. x=0 , y=0 və x+ y+z=1 müstəviləri ilə hüdudlanmış R tetraedrinin həcmini hesablamalı (şəkil 2).
Şəkil – 2
Üçqat inteqralın tərifindən aydındır ki,
V=∫ ∫ R∫ dV
olar. (5) düsturuna görə
V= ∫ σ∫dx dy ∫0
1−x− y
dz=∫0
1
dx∫0
1− x
dx ∫0
1−x− y
dz=¿¿
¿∫0
1
dx ∫0
1−x
(1−x− y )dy=∫0
1 (1−x)2
2dx=1
6
və ya
V=16
alınır.
Misal 2. x2+ y2+z2 ≤r 2 kürəsi üzrə götürülmüş üçqat inteqralı təkrar inteqral şəklində yazmalı.
səthi ilə, yuxarıdan isə z=+√r2−x2− y2 səthi ilə hüdudlanmışdır. Onda (6) düsturuna görə
∫ ∫ R∫ f (x , y , z ) dV=∫−r
r
dx ∫−√r2− x2
+√r 2−x 2
dy ∫−√r 2−x2− y2
+√r2−x2− y2
f ( x , y , z ) dz.
3. Cismin ətalət momenti, kütlə və ağırlıq mərkəzin
koordinatları.
Üçqat inteqrallar fizika və mexanikanın bir çox məsələlərinin həllində geniş tətbiq olunur. Bunların yalnız bir neçəsini burada göstərməklə kifayətlənirik.
Cismin kütləsi. Tutaq ki, V kublanan cisimdir və μ(x , y , z) onun həcm sıxlığıdır. Onda V oblastında yerləşən bütün kütlə
m=∫ ∫V∫ μ (x , y , z)dV (1)
düsturu ilə hesablanır. (1) düsturu ikiqat inteqral vasitəsilə maddi müstəvi fiqurun kütləsinin hesablama düsturu kimi isbat olunur (M=x, ya M=y, ya da M=z).
Ağırlıq mərkəzinin koordinatları. Həcmi sıxlığı μ(x , y , z) olan V cisminin ağırlıq mərkəzinin koordinatları
x A=∫ ∫ V∫ xμ (x , y , z)dV
∫ ∫ V∫ μ(x , y , z )dV, y A=∫ ∫ V∫ yμ(x , y , z )dV
∫ ∫ V∫ μ(x , y , z)dV, z=∫ ∫ V∫ zμ(x , y , z )dV
∫ ∫ V∫ μ(x , y , z)dV
düsturları vasitəsilə hesablanır. V cismi bircinsli olduqda, yəni μ ( x , y , z )=μ=¿
= sabit olduqda yuxarıdakı düsturlar aşağıdakı sadə şəkildə yazılar:
x A=1V ∫ ∫ V∫ xdV , y A=
1V ∫ ∫ V∫ y dV , z= 1
V ∫ ∫ V∫ z dV .
Ətalət momenti. Tutaq ki, kublanan V cisminin həcmi sıxlığı μ(x , y , z) funksiyasıdır. Maddi müstəvi fiqurun ətalət momentini tapma qaydası ilə V cisminin koordinat oxlarına nəzərən ətalət momentini tapmaq olar:
J z=∫ ∫ V∫ (x2+ y2 ) μ ( x , y , z )dV ,
J y=∫ ∫ V∫ (x2+ z2 ) μ ( x , y , z )dV ,
J x=∫ ∫ V∫ ( y2+ y2 ) μ ( x , y , z )dV .
Cismin koordinat başlanğıcına nəzərən ətalət momenti isə
J0=12 (J x+J y+J z )=∫ ∫V∫ (x2+ y2+z2 )μ ( x , y , z )dV
düsturu ilə hesablanır.
Mövzu 29
Əyrixətli inteqral.
1. İstiqamətli əyrilər.
2. I növ əyri xətli inteqral və onun hesablanması.
3. II növ əyri xətli inteqral və onun hesablanması.
4. I və II növ əyri xətli inteqrallar arasındakı əlaqə.
5. Qrin düsturu.
1. İstiqamətli əyrilər.
Ədəd oxunun parçasında təyin olunmuş funksiyaların müəyyən inteqralına baxılır. Bir çox praktiki məsələlərinin həlli isə müəyyən əyri parçasında təyin olunmuş funksiyalar üçün yeni inteqral anlayışının verilməsini tələb edir. Belə inteqrallar əyrixətli inteqrallar adlanır. İki növ əyri xətli inteqral vardır.
Müxtəlif müstəvi və ya fəza əyriləri üzrə götürülmüş əyrixətli inteqrallara baxaq.
Tutaq ki, [a , b ] parçasında kəsilməyən x=φ (t ) , y=ψ (t) və z=λ (t) funksiyaları fəzada Г (≡ AB) əyrisini təyin edir:
x=φ ( t ) ,y=ψ ( t ) ,z=λ ( t ) ,
(a ≤ t ≤ b ) . (1)
Bu o deməkdir ki, t parametrinin [a , b ] parçasındakı bütün qiymətlərində alınan (x , y , z)≡(φ (t ) , ψ ( t ) , λ (t )) nöqtələri çoxluğu əyrisini təşkil edir.
(1) münasibəti fəza əyrisinin parametrik tənliyi adlanır. (1) tənlikləri əyrisini təkcə nöqtələr çoxluğu kimi təyin etmir, həm də onun istiqamətini, yəni nöqtələrin əyri üzərində yerləşmə ardıcılığını təyin edir. Parametrin a ≤ t1<¿ t 2≤ b qiymətləri verildikdə, deyirlər ki, əyrinin ¿(t 2),ψ ( t2 ) , λ (t 2 )¿ nöqtəsi ¿(t 1), ψ ( t1 ) , λ (t 1)¿ nöqtəsindən sonra gəlir. T parametri a-dan b-yə kimi bütün qiymətləri alaraq kəsilməz dəyişdikdə, M=(φ (t ) ,ψ (t ) , λ ( t ))
nöqtəsi əyrinin başlanğıc A nöqtəsindən son B nöqtəsinə kimi bütün əyri üzrə.
hərəkət edir (şəkil 1).
Şəkil – 1
Əyri üzərində t parametrinin artmasına uyğun olan istiqamət müsbət, azalmasına uyğun olan istiqamət isə mənfi hesab olunur. Bu halda parametrin
t = a qiymətində alınan A=(φ (a ) ,ψ (a ), λ ( t )) nöqtəsi əyrinin baçlanğıc nöqtəsi, t = b qiymətində alınan B=(φ (a ) , ψ (a ) , λ (t )) nöqtəsi isə son üç nöqtəsi alınır. Əyri üzərində ox işarəsi onun müsbət istiqamətini göstərir.
Üzərində istiqamət təyin olunan əyriyə istiqamətlənmiş əyri deyilir.
Ola bilər ki, parametrin bir neçə müxtəlif qiymətinə əyrinin eyni bir nöqtəsi uyğun olsun. Məsələn, t parametrinin t 1< t2 qiymətlərində φ (t 1 )=φ (t2 ) ,ψ ( t1 )=ψ (t 2 ) , λ (t1 )=λ (t 2 ) olduqda əyrinin ¿(t 1), ψ ( t1 ) , λ (t 1)¿ və ¿(t 2), ψ ( t2 ) , λ (t 2 )¿ nöqtələri üst-üstə düşür, yəni bü nöqtədə əyri özü-özünü kəsir. Əyrinin başlanğıc A nöqtəsi və son B nöqtəsi üst-üstə düşdükdə ona qapalı
əyri deyilir.
Məlumdur ki, [a , b ] parçasında kəsilməyən (1) funksiyalarının verilməsi bir skalyar arqumentli
τ ( t )=φ (t ) i+ψ (t ) j+ λ (t ) k (2)
vektor funksiyasının verilməsinə ekvivalentdir. Onda r=r ( t ) , t⋳|a , b|, Г əyrisinin vektorial göstərişi olar. Bunu Г=r (t );a≤ t ≤ b kimi yazılır. Hamar vektor funksiya, yəni |a ,b| parçasında sıfra çevrilməyən kəsilməz törəməsi olan r (t ) vektor
funksiyası vasitəsilə göstərilən əyriyə hamar əyri deyilir. Hamar Г=r ( t );a ≤ t ≤ b əyrisinin hər bir nöqtəsində toxunanı var və r ´ ( t ) vektoru həmin toxunanla eyni istiqamətdə (parametrin artmasına uyğun olan istiqamətə) yönəlmişdir. Buna görə də
τ (t )= r ´ (t )|r ´ (t )| (3)
vahid vektoru əyrisinin toxunanı üzərində yerləşir və onun istiqaməti parametrin artmasına uyğun olan istiqamətin eynidir. Beləliklə, (3) vahid vektoru
əyrisinin müsbət istiqamətini, −τ ( t ) isə mənfi istiqaməti təyin edilir.
r ´ ( t )=φ ´ ( t ) i+ψ ´ (t ) j+λ ´ ( t ) k
olduğundan
d r ( t )=r ´ (t )dt=φ ´ (t )dt i+ψ ´ ( t )dt j+λ ´ (t )dt k=¿
¿dx· i+dy· j+dz·k
və
|d r ( t )|=|r ´ (t )dt|=√ [φ ´ ( t ) ]2+[ψ ´ (t ) ]2+[ λ ´ (t ) ]2dt
olar. Sağ tərəfdəki ifadə əyrisi qövsunun diferensialıdır:
dl=√[φ´ ( t ) ]2+[ψ ´ ( t ) ]2+ [ λ ´ ( t ) ]2 dt.
Tutaq ki, əyrisinin istiqamətini təyin edən vahidτ vektorunun yönəldici bucağları α ,β və γ-dır. Onda vahid vektorun
τ=i · co sα+ j · cosβ+k ·cosγ
və (3) bərabərliyindən alınan
τ=φ ´ ( t ) i+ψ ´ (t ) j+λ ´ ( t ) k
√[φ´ ( t ) ]2+[ψ ´ ( t ) ]2+ [ λ ´ ( t ) ]2= dx· i+dy· j+dz· k
dl
kimi iki göstərilişi olar. Buradan
cosα=dxdl
, cosβ=dydl
, cosγ=dzdl (4)
alınır.
Tutaq ki, qapalı əyridir. Özü-özünə kəsməyən qapalı əyri kontur adlanır.
Tutaq ki, konturu σ oblastının sərhədidir (şəkil 2).
Şəkil – 2
konturu üzrə hərəkət etdikdə konturun əhatə etdiyi σ oblastı solda qalırsa, həmin istiqamət müsbət, əks istiqamət isə mənfi hesab olunur. Müsbət istiqamətli
konturu Г+¿ ¿
(çox zaman sadəcə ilə), mənfi istiqamətli konturu isə Г−¿¿
ilə işarə edillər. Konturun müsbət və mənfi istiqamətləri şəkildə göstərilmişdir.
2. I növ əyri xətli inteqral və onun hesablanması.
Tutaq ki, (Oxy) müstəvisi üzərində yerləşən sonlu uzunluğu Г (≡ AB) əyrisi və
həmin əyri üzərində təyin olunmuş f (x , y ) funksiyası verilmişdir. əyrisini
A=A0 , A1 , A2 ,…, An−1 , An=B
nöqtələri vasitəsilə Ak Ak +1(k=0 ,1 , …, n−1) kimi kiçik hissələrə bölək
(şəkil 1).
Şəkil – 1
əyrisinin (1) şəkildə bölgüsünü T və bölgüdən alınan Ak Ak +1 qövsunun uzunluğunu ∆ lk ilə işarə edək. ¿(k=0 ,1 ,…,n−1) ədədlərinin ən böyük T bölqüsünün parametri adlanır və λ(T) ilə işarə olunur:
λ=λ (T )=max (∆ l0 ,∆ l1 ,…,∆ ln−1).
Bölgüdən alınan kiçik hissələrin hər birinin üzərində bir ixtiyari
M k=(ξk , ηk ) (k=0 ,1 , …, n−1) nöqtəsi götürək və aşağıdakı kimi cəm düzəldək:
Jn (T )=∑k=0
n−1
(ξk , ηk )∆ lk. (2)
(2) cəminə f funksiyasınınГ əyrisində (və ya əyrisi üzərində) inteqral cəmi
deyilir. Bu cəmin qiyməti əyrisinin T bölgüsündən və (ξ k , ηk ) nöqtələrinin seçilməsindən aılıdır.
Tərif. (2) inteqral cəminin λ(T)→ 0 şərtində sonlu limiti varsa, həmin limitə f (x , y ) funksiyasının əyrisi üzrə birinci növ əyrixətli inteqralı deyilir və
∫ Г f ( x , y )dl ilə işarə olunur:
∫ Г f ( x , y )dl=∫ AB f ( x , y )dl=limλ→ 0∑k=0
n−1
f (ξk , ηk )∆ lk . (3)
Tərifdən aydındır ki, birinci növ əyrixətli inteqralın qiyməti əyrinin istiqamətindən asılı deyildir, yəni AB əyrisi (istiqaməti A-dan B-yə) və BA əyrisi (istiqaməti B-dan A-ya) üzrə inteqrallar bərabərdir:
∫ AB f (x , y )dl= ∫ BA f ( x , y ) dl . (4)
Doğrudan da, (1) bölgüsünü tərsinə nömrələsək və uyğun inteqral cəmi düzəltsək, onda yenə də (2) cəmini alırıq (Ak Ak +1 qövsü ilə Ak Ak +1 qövsünün uzunluğu eyni müsbət ∆ lk ədəddir). Buradan (4) bərabərliyi alınır.
Birinci növ əyrixətli inteqralın hesablanması müəyyən inteqralın hesablanmasına gətirilir. Bunu isbat etmək eçen, əvvəlcə fərz edək ki, (Oxy) müstəvisi üzərində uzunluğu sonlu L ədədi olan AB əyrisi və onun üzərində A-dan B-ya istiqamət təyin edilmişdir. Bu halda əyri üzərindəki ixtiyari M (x , y ) nöqtəsinin vəziyyəti AM qövsünün l uzunluğu (l = uz · AM) ilə tamamilə təyin edilir (şəkil 2).
Şəkil – 2
Onda M nöqtəsinin x və y koordinatları da l parametrinin funksiyası olar:
x=x (l)y= y (l)
(0 ≤ l≤ L ) . (1)
Bu isə AB əyrisinin parametrik tənliyidir. (1) tənliklərindən parametrin l = 0 qiymətində A nöqtəsinin koordinatları, l = L qiymətində isə B nöqtəsinin koordinatları alınır.
Tutaq ki f (x , y ), AB əyrisi üzərində təyin olunmuş kəsilməyən funksiyadır. Bu halda həmin funksiya [0 , L ] parçasında l parametrinin mürəkkəb funksiyası olar:
f ( x , y )=f [ x (l ) , y (l)] .
Tutaq ki, AB əyrisinin T bölgüsü
A=A0 , A1 , A2 , …, An−1 , An=B (2)
aparılmış və bölgüsən alınan Ak Ak +1 qövsləri üzərində ixtiyari M k (ξk , ηk ) nöqtələri seçilmişdir. Ak (k=0 ,1 ,…,n−1) nöqtəsini parametrin uyğun olan qiymətini lk (k=0 , 1 ,… ,n−1) ilə işarə etsək, onda ∆ lk=uz· Ak Ak+1=¿lk +1−lk olar. Ak Ak +1 qövsü üzərində seçilmiş M k=(ξk , ηk )nöqtəsinə parametrin uyğun olan qiyməti τ k olsa, onda ξk=x (τ k ), ηk= y (τk )( lk ≤ ≤ τk ≤¿ lk+ 1) alınar. Bu halda, f (x , y ) funksiyasının AB əyrisinin T bölgüsünə və seçilmiş M k nöqtələrinə uyğun olan inteqral cəmi
∑k=0
n−1
(ξk , ηk )∆ lk=∑k=0
n−1
[ x (τk ) , y (τk ) ]∆ lk (3)
kimi yazılar. Bərabərliyin sağ tərəfindəki cəm ∫0
L
f [ x ( l ) , y (l)] dl müəyyən inteqralına
uyğun olan inteqral cəmidir. Buna görə də T bölgüsünün λ=λ (T ) parametrinin sıfra yaxınlaşması (λ→ 0) şərtində (3) bərabərliyində limitə keçdikdə
∫ AB f (x , y )dl=∫0
L
f [ x (l ) , y (l)]dl (4)
bərabərliyi alınır (əlbəttə, (3) bərabərliyindəki cəmlərin eyni zamanda sonlu limitləri olduqda).
f ( x , y ) funksiyası AB əyrisi üzərində və (1) funksiyaları [0 , L ] parçasında
kəsilməyən olduqda müəyyən inteqralın varlıq teoreminə görə ∫0
L
f [ x ( l ) , y (l)] dl
inteqralı sonludur. Buna görə də həmin şərtlər daxilində (4) bərabərliyinin sol tərəfindəki əyrixətli inteqral da sonludur və (4) bərabərliyi ödənilir.
İndi fərz edək ki, hamar AB əyrisi ixtiyari t parametrində (t parametri qövs uzunluğu olmaya da bilər) asılı olan
x=φ (t)y=ψ (t )
(α ≤t ≤ β ) (5)
tənlikləri vasitəsilə verilmişdir. Tutaq ki, t parametrinin α−¿dan β−¿ya gədər artması əyrinin A-dan B-ya istiqamətinə uyğundur. Onda əyri qövsünun diferensialı
dl=dl (t )=√[φ ´ (t)]2+[ψ ´ (t)]2 dt (6)
şəklində olar. Bu halda (4) bərabərliyinin sağ tərəfindəki müəyyən inteqralda dəyişənləri əvəz etsək, əyri xətli inteqralın hesablanması üçün
∫ AB f (x , y ) dl=∫0
L
f [ x (l ) , y (l )]dl=¿
¿∫α
β
f [φ (t) ,ψ (t )]√ [φ ´ (t )]2+[ψ ´ (t )]2 dt (7)
düsturunu alırıq.
Xüsusi halda, AB əyrisinin tənliyi düzbucaqlı koordinatlar vasitəsilə y=ϕ ( x )
(a ≤ x≤ b) şəklində verildikdə, x dəyişənini parametr hesab etməklə
(x=x , y=ϕ ( x )) (7) düsturunu
∫ AB f (x , y )dl=∫b
a
f [ x , ϕ (x)]⨯ √1+[ϕ ´ (x )]2dx (8)
şəklində yazmaq olar.
Şəkil – 3
Misal. y=12
x2 parabolasının O (0, 0) və A (1,12 ) nöqtələri ilə məhdud OA
hissəsi üzrə (şəkil 3) götürülmüş
J= ∫ AB xy dl
əyrixətli inteqralını hesablamalı.
(8) düsturuna görə
J=12∫0
1
x3√1+x2 dx= 14∫0
1
x2√1+x2 d (1+ x2 )=¿
¿ 14∫1
2
(V−1)√V dV=√2+115
,V=1+x2 .
Əyrixətli inteqrallar bir sıra məsələlərin həllində tətbiq olunur. Burada birinci növ əyrixətli inteqral vasitəsilə maddi AB əyrisinin kütləsi hesablanır.
Tutaq ki, hamar və ya hissə-hissə hamar maddi AB əyrisinin xətti sıxlığı μ=μ (x , y ) ilə işarə olunmuşdur.
AB əyrisinin A=A0 , A1, A2 , …, An−1, An=B nöqtələri vasitəsilə kiçik Ak Ak +1 hissəsi üzərində ixtiyari M k=(ξk , ηk ) nöqtəsi götürək və fərz edək ki, Ak Ak +1 qövsünün bütün nöqtələrində xətti sıxlıq μ (ξk , ηk ) kəmiyyətinə bərabərdir. Onda maddi Ak Ak +1 qövsünün kütləsi mk ≈ μ (ξk , ηk )∆ lk olar (∆ lk=uz· A k A k+1 ¿ .
Buna görə də maddi AB əyrisi üzərində paylanmış kütlə təqribi olaraq
m=∑k=0
n−1
mk ≈∑k=0
n−1
μ (ξk , ηk )∆ lk
bərabərliyi ilə hesablanar. Bu bərabərlikdə aparılan bölgünün λ=λ (T )=¿
¿max ∆lk=(k=0,1 , …n−1) parametrinin sıfra yaxınlaşması şərtində limitə keçdikdə maddi AB əyrisinin dəqiqi kütləsi alınır:
m=limλ →0∑k=0
n−1
μ (ξk , ηk )∆ lk= ∫ AB f ( x , y )dl .
Nəhayət qeyd edək ki, üçölçülü fəzada yerləşən əyrilər üzrə götürülmüş birinci növ əyrixətli inteqrallara baxmaq, onların hesablanmasından xassələrindən və tətbiqlərindən danişmaq olar.
3. II növ əyri xətli inteqral və onun hesablanması.
Tutaq ki, (Oxy) müstəvisində yerləşən istiqamətlənmiş Г=AB əyrisi və bu əyri
üzərində kəsilməyən P (x, y) funksiyası verilmişdir. əyrisini
A=A0 , A1, A2 , …, An−1, An=B
nöqtələri vasitəsilə Ak Ak +1(k=0,1 ,…, n−1) kimi kiçik hasillərə bölək. əyrisinin (1) bölgüsündən (bu bölgünü T ilə işarə edək) alınan Ak Ak +1 qövsünun uzunluğu ∆ lk olsun. ∆ lk (k=0,1 , …,n−1) ədədlərinin ən böyüyü T bölgüsünün parametri adlanır və λ(T) ilə işarə olunur:
λ=λ (T )=max (∆ l0 , ∆ l1 , …, ∆ ln−1) .
Şəkil – 4
Bölgüdən alınan hər bir Ak Ak +1 hissəsi üzərində bir M k=(ξ k , ηk ) nöqtəsini götürək və aşağıdakı kimi inteqral cəmi düzəldək:
σ k (T )=∑k=0
n−1
P ( ξk , ηk )∆ xk. (2)
Burada ∆ xk=xk +1−xk ilə Ak Ak +1 qövsünün Ox oxu üzərində proyeksiyası işarə olunmuşdur (şəkil 4).
Tərif. (2) cəminin λ (T )→0 şərtində sonlu limiti varsa, həmin limitə P(x, y) funksiyasının ∫ AB P ( x , y ) dx ilə işarə olunur:
∫ AB P ( x , y )dx= limλ(T )→ 0
∑k=0
n−1
P (ξk ,ηk )∆ xk . (3)
AB əyrisi üzərində təyin olunmuş kəsilməyən Q(x, y) funksiyasının y dəyişəninə görə ikinci növ
∫ ABQ ( x , y )dy= limλ(T)→ 0
∑k=0
n−1
Q (ξk , ηk )∆ yk , ∆ yk= yk +1− yk , (4)
əyrixətli inteqralı da analıji olaraq təyin olunur.
(3) və (4) inteqrallarının cəmi ikinci növ ümumi əyrixətli inteqral adlanır və
∫ AB P ( x , y ) dx+ ∫ AB Q ( x , y )dy= ∫ AB P ( x , y ) dx+Q ( x , y )dy (5)
kimi işarə olunur.
Tərifdən aydındır ki, ikinci növ əyrixətli inteqralların qiyməti əyrinin istiqamətindən asılıdır:
∫ AB P ( x , y ) dx+Q ( x , y )dy=− ∫BA P (x , y )dx+Q ( x , y )dy. (6)
Doğrudan da, Ak Ak +1 qövsünun (Ox) oxu üzərində proyeksiyası ∆ xkolduğu halda, Ak Ak +1 qövsünun həmin ox üzərində proyeksiyası −∆ xk olar. Buna görə də AB əyrisini (1) bölgüsünü tərsinə nömrələsək (yəni BA əyrisinin kiçik hissələrə bölsək) və uyğun (2) cəmini düzəltsək, onda
σ n´ (T )=−∑
k=0
n−1
P (ξk , ηk )∆ x
münasibəti və buradan da limitə keçdikdə
∫ BA P (x , y )dx=−∫ AB P ( x , y )dx
bərabərliyi alınır. Bu mühakimə (4) inteqralı üçün də doğrudur.
Qeyd edək ki, analoji olaraq üçölçülü fəzada yerləşən AB əyrisi üzərində təyin olunmuş P ( x , y , z ) , Q ( x , y , z ) və R ( x , y , z ) funksiyaları üçün
∫ AB P ( x , y , z )dx+ ∫ ABQ ( x , y , z)dy+ ∫ AB R ( x , y , z )dz=¿
∫ AB P ( x , y , z) dx+Q ( x , y , z )dy+R ( x , y , z )dz (7)
kimi ikinci növ ümumi əyrixətli inteqralıda təyin olunur. Bundan sonra (5) və (7)
əyrixətli inteqrallarını sadəcə olaraq
∫ BA Pdx+Q a´ y və ∫ BA Pdx+Q a´ y+Rdz (8)
kimi yazacağıq.
Qapalı konturu üzrə götürülmüş əyrixətli inteqrallar uyğun olaraq
∮Г Pdx+Qdy və ∮Г Pdx+Qdy+Rdz
kimi yazılır. Bu inteqrallar konturunun müsbət istiqaməti üzrə götürülmüş
hesab edilir. konturunun mənfi istiqaməti üzrə götürülmüş inteqral üçün isə
∫ Г−¿Pdx+Qdy=−∫ Г +¿ Pdx+Qdy=−∫Г Pdx+Qdy¿ ¿
münasibəti doğru olar.
4. I və II növ əyri xətli inteqrallar arasındakı əlaqə.
Tutaq ki, (Oxy) müstəvisində yerləşən istiqamətlənmiş hamar müstəvi əyrisi
x=φ (t)y=ψ (t )
(t 0 ≤t ≤T )
parametrik tənlikləri ilə verilmişdir və P(x, y), Q(x, y) funksiyaları onun üzərində
kimi ifadələri vardır. Bunlara əsasən birinci və ikinci növ əyrixətli inteqrallar arasında aşağıdakı kimi əlaqə yaranır:
∫ Г Pdx+Qdy= ∫ Г (Pcos α+Qcos β )dl , (1)
fəza əyrisi olduqda isə
∫ Г Pdx+Qdy+Rdz= ∫ Г (Pcos α+Qcos β+Rcos γ )dl (2)
münasibəti alınır.
Birinci növ əyrixətli inteqralların hesablanma qaydası və (1) bərabərliyinə əsasən ikinci növ əyrixətli inteqralların hesablanma düsturunu almaq olar. Bu məqsədlə
cos α= φ´ t
√ [φ ´ (t )]2+ [ψ ´(t )]2 və cos β= ψ ´ t
√ [φ ´ (t )]2+ [ψ ´ (t )]2
olduğunu nəzərə almaq lazımdır. Onda (1) bərabərliyinə əsasən
Xüsusi halda, hamar əyrisinin tənliyi y= f ( x )(a ≤ x ≤ b) şəklində olsa, onda (3) düsturu
∫ Г Pdx+Qdy=∫b
a
¿¿ (4)
kimi yazılır. əyrisi y= y0 üfüqi düz xəttinin parçası olduqda həmin parça üzərində y ´ ≡0 olar və əyrixətli inteqral x-ə nəzərən adi müəyyən inteqrala çevrilər:
∫ Г Pdx+Qdy=∫b
a
p (x , y0 )dx.
əyrisi x=x0 şaquli düz xəttinin parçası olduqda isə əyrixətli inteqral y-ə nəzərən adi müəyyən inteqrala (x ´ ≡ 0 olduğundan) çevrilir:
∫ Г Pdx+Qdy=∫a
b
Q(x¿¿0 , y)dy ¿.
Misal. Mərkəzi koordinat başlanğıcında və radiusu R olan çevrəsi üzrə (müsbət istiqamətdə) götürülmüş
σ müstəvi oblastı üzrə götürülmüş ikiqat inteqralla həmin oblastın sərhədi üzrə götürülmüş əyrixətli inteqral arasında müəyyən əlaqə vardır.
Bu əlaqəni təyin etmək üçün, fərz edək ki, (Oxy) müstəvisində yerləşən σ oblastı düsgün (daha dəqiq desək, Ox oxuna nəzərən düzhün) oblastdır. Həmin oblast x=a , x=b (a<b) düz xətləri, y=φ(x ) və y=ψ ( x )(φ (x)≤ψ ( x )) əyriləri ilə əhatə olunmuşdur (şəkil 1). Bu əyrilər σ oblastının sərhədi olan qapalı
Г=ABCDA=AB+BC+CD+DA
konturunu təşkil edir. Qeyd edək ki, konturunun A və D nöqtələri, eləcə də B və C nöqtələri üst-üstə düşə bilər.
Fərz edək ki, P(x, y), Q(x, y) funksiyaları qapalı σ oblastında kəsilməzdir və
kəsilməyən δP (x , y )δy
, δQ( x , y)δx xüsusi törəmələri vardır. Onda ikiqat ∫ σ∫ δP( x , y)
δydxdx
inteqralı sonludur və onu təkrar inteqral şəklində yazmaq olar:
Şəkil – 1
∫ σ∫ δP( x , y)δy
dxdy=∫a
b
[P ( x , y )ψ (x)φ(x) ]dx=¿
¿∫a
b
P [x , ψ (x) ] dx−¿∫a
b
P [ x ,φ(x ) ] dx¿
alınır. Sağ tərəfdəki inteqralları əyrixətli inteqrallarla əvəz etmək olar:
∫a
b
P [ x , ψ (x )]dx=¿ ∫ DC=P (x , y ) dx ,¿
∫a
b
P [ x , φ (x)] dx= ∫ AB=P ( x , y )dx.
Onda, DA və BC parçalarının absis oxuna perpendikulyar olmasına görə alınan
∫ DA=P (x , y )dx= ∫ BC=P ( x , y )dx=0
bərabərliklərinə əsasən
∫ σ∫ δP( x , y)δy
dx dy=∫ DC=P ( x , y )d x− ∫ AB=P ( x , y )dx−¿
− ∫ BC=P ( x , y )dx− ∫ DA=P ( x , y ) dx=− ∫ ABSDA P ( x , y )dx=¿
¿−∫ Г=P ( x , y )dx
və ya
∫ σ∫ δP( x , y)δy
dx dy=− ∫ Г=P ( x , y )dx (1)
münasibəti alınır.
Eyni qayda ilə, Oy oxuna nəzərən düzğün olan və qapalı konturu ilə əhatə olunmuş σ oblastı üçün
∫ σ∫ δP( x , y)δy
dxdy= ∫ Г Q (x , y )dy (2)
düsturunu da isbat etmək olar.
Beləliklə, ixtiyari düzgün (hər iki oxa nəzərən) σ oblastı üçün (1) və (2) bərabərliklərinin hər ikisi doğrudur. Həmin bərabərlikləri tərəf-tərəfə topladıqda
∫ Г Pdx+Qdy= ∫ σ∫( δQδx− δP
δy )dx dy (3)
düsturu alınır. (3) münasibəti Qrin düsturu adlanır.
σ oblastı düzgün deyilsə, ıakin düzgün oblastlara ayrıla bilərsə, onda onun üçün (3) Qrin düsturu doğru olar.
Doğrudan da, tutaq ki, konturu ilə əhatə olunmuş σ oblastı köməkci
γi(i=1,2 ,…,n) xətləri vasitəsilə σ k (k=1,2, …, m) düzgün oblastlarına ayrılmışdar. σ k oblastlarının hər biri üçün (3) Qrin düsturunu yazıb, alınan bərabərlikləri tərəf-tərəfə topladıqda, köməkçi xətlər üzrə bir-birinin əksi istiqamətində götürülmüş əyrixətli inteqrallar islah olunar. Nəticədə, σ k oblastının birləşməsi olan σ oblastı
üzrə götürülmüş ikiqat inteqral konturu üzrə götürülmüş əyrixətli inteqrala bərabər olar.
Qrin düsturunun doğru olduğu σ oblastının sərhədi bir neçə (n sayda) γk (k=1,2 , …, n) konturlarından da ibarət ola bilər (şəkil 2). Bu zaman σ−¿ya çoxrabitəli (n-rabitəli) oblast, onun sərhədinə isə mürəkkəb kontur deyilir. Çoxrabitəli oblast üçün yazılmış Qrin düsturunda ∫ Г Pdx+Qdy inteqralı həmin γk konturları üzrə götürülmüş inteqralların cəminə bərabər olur:
∫ Г Pdx+Qdy= ∫γ k+¿Pdx+Qdy+∑
k=2
n
∫γ k−¿Pdx+Qdy ¿¿.
Şəkil – 2
Bu zaman γk konturları üzərində elə istiqamət, müstəvi fiqurların sahəsini
hesablayaq. Tutaq ki, σ hər hansı düzgün oblast və onun sərhədidir. Məlumdur ki, onun S(σ) sahəsi ikiqat inteqralla
S(σ)= ∫ σ∫dx dy
kimi hesablanır. Onda Qrin düsturuna görə
∫ Г x dy= ∫ σ∫dx dy=S(σ )
− ∫ Г x dy= ∫ σ∫dx dy=S(σ )
olar. Buradan σ oblastının S(σ) sahəsini hesablamaq üçün simmetrik
S(σ)= 12
∫ Г xdy− y dx (4)
düsturu alınır.
Misal. x2
a2 +y2
b2=1 ellips əyrisi ilə əhatə olunmuş fiqurun sahəsini hesablamalı.
Ellipsin parametrik tənliyi x=a cost , y=b sint (0≤ t ≤ 2 π ) olduğundan (4) düsturuna görə taparıq:
S(σ)= 12
∫ Г x dy− y dx=12∫0
2π
[ (a cost ) (b sint )−(b sint ) (−a cost ) ]dt=¿
¿ 12∫0
2 π
ab dt=ab2 ∫0
2 π
dt=π ab .
Mövzu 30
Adi diferensial tənliklər. birtərtibli diferensial tərtiblər.
Koşi məsələsi. Xətti diferensial tənliklərin əsas növləri.
1. Əsas anlayışlar, təriflər.
2. Birtərtibli diferensial tənliklər.
3. Dəyişənlərinə ayrıla bilən diferensial tənliklər.
4. Bircins diferensial tənliklər.
5.Birtərtibli xətti diferensial tənlik. Bernulli tənliyi.
1. Əsas anlayışlar, təriflər.
Tərif. İxtiyari x dəyişəni, onun y= y (x ) funksiyası və bu funksi-yanın həmin
x dəyişəninə nəzərən y ' ( x ) , y ' ' ( x ) ,. .. , y(n )( x )¿ törəmələri daxil olan tənliyə adi
diferensial tənlik deyilir.
Diferensial tənliyə daxil olan ən yüksək tərtibli törəmənin tərtibinə həmin
diferensial tənliyin tərtibi deyilir. n-tərtibli adi diferensial tənlik ümumi şəkildə
aşağıdakı kimi yazılır
F (x , y , y ' , y' ' ,. .. , y(n ))=0 . (1)
(1) diferensial tənliyini eyniliyə çevirən y=ϕ ( x ) funksiyasına həmin tənliyin
həlli deyilir. Bu, o deməkdir ki, y=ϕ ( x ) funksiyasını və onun
ϕ ' ( x ) , ϕ ' ' ( x ) ,. . ., ϕ(n)( x ) törəmələrini (1) tənliyində yerinə yazdıqda həmin tənlik x -ə
nəzərən eyniliyə çevrilir.
n-tərtibli diferensial tənliyin ümumi həlli n sayda ixtiyari sabitin daxil olduğu
elə
y=ϕ ( x ,C1 ,C2 , . .. , Cn ) (2)
həllinə deyilir ki, o verilmiş tənliyi eyniliyə çevirsin.
Diferensial tənliyin ümumi həllinə daxil olan ixtiyari sabitlərin müəyyən
qiymətlərində alınan hər bir həlli diferensial tənliyin xüsusi həlli adlanır.
Verilmiş diferensial tənliyi ödəyən funksiya (həll) qeyri-aşkar və parametrik
şəkildə də verilə bilər. Bu halda həmin funksiyaya bəzən diferensial tənliyin
inteqralı deyilir. Diferensial tənliyin həllinin qrafiki inteqral əyrisi adlanır.
2. Birtərtibli diferensial tənliklər.
Birtərtibli diferensial tənlik ümumi şəkildə aşağıdakı kimi yazılır
F (x , y , y ' )=0 .
Bu tənliyi axtarılan funksiyanın y törəməsinə nəzərən həll etmək mümkün
olduqda
y '=f ( x , y ) (1)
şəklində törəməyə nəzərən həll olunmuş birtərtibli diferensial tənlik alınır.
(1) tənliyinin ümumi həlli
y=ϕ ( x , С ) (2)
şəklindədir. Burada C ixtiyari sabitdir. Həndəsi olaraq (2) ümumi həll inteqral
əyriləri ailəsindən ibarətdir, yəni C sabitinin müxtəlif qiymətlərinə uyğun olan
xətlər toplusudur. İnteqral əyriləri belə bir xassəyə malikdirlər ki, onların hər bir
M(x, y) nöqtəsində toxunanın meyl bucağı
tgα= f ( x , y )
şərtini ödəyir.
Əgər inteqral əyrisinin keçdiyi M 0( x0 , y 0) nöqtəsini versək, onda bununla sonsuz
inteqral əyriləri ailəsindən müəyyən bir inteqral əyrisi seçilir və bu bizim
diferensial tənliyin xüsusi həllinə uyğundur.
Analitik olaraq bu tələb x=x0 olduqda y= y0 başlanğıc adlanan şərtə gətirilir.
Əgər (2) ümumi həll məlumdursa, onda alırıq ki,
y0=ϕ ( x0 , С ).
Bu şərtdən C sabitini müəyyən etmək olar və nəticədə, uyğun xüsusi həlli
tapmaq olar. Koşi məsələsi bundan ibarətdir.
Koşi məsələsi. (1) diferensial tənliyinin y0=ϕ ( x0) başlanğıc şərti ödəyən, yəni
arqumentin x=x0 qiymətində verilmiş y= y0 qiymətini alan y=ϕ ( x ) həllini tapın.
Koşi məsələsini həndəsi olaraq belə ifadə etmək olar: (1) diferensial tənliyinin
verilmiş M 0( x0 , y 0) nöqtəsindən keçən inteqral əyrisini tapın.
Qeyd edək ki, törəməyə nəzərən həll olunmuş birtərtibli diferensial tənliyi həmişə
M ( x , y )dx+N ( x , y )dy=0 (3)
diferensial şəkildə yazmaq olar. Doğrudan da (2) tənliyini
dydx=f (x , y ) ,
f ( x , y )dx−dy=0
kimi yazıb, orada M ( x , y )=f (x , y ) və N ( x , y )=1 qəbul etsək (3) şəklində diferen-
sial tənlik alınar.
3. Dəyişənlərinə ayrıla bilən diferensial tənliklər.
Tutaq ki, M(x) və N ( y ) funksiyaları uyğun olaraq (a,b) və (c,d ) intervalında
kəsilməzdir. Bu halda
M ( x )dx+N ( y )dy=0 (1)
tənliyinə dəyişənlərinə ayrılmış diferensial tənlik deyilir. (1) tənliyində dx-in
əmsalı ancaq x-dən, dy-in əmsalı ancaq y-dən asılıdır.
Fərz edək ki, y ( x ) funksiyası (1) tənliyinin həllidir. Onda həmin funksiya (1)
tənliyini eyniliyə çevirir:
M ( x )dx+N ( y )dy≡0 . (2)
Bu eyniliyi inteqralladıqda
∫M ( x )dx+∫N ( y )dy=C (3)
münasibəti alınar, burada S ixtiyari sabitdir. Buradan aydındır ki, (3) tənliyi (1)
tənliyinin bütün həllərini təyin edir. Buna görə də (3) münasibətinə (1) tənliyinin
ümumi inteqralı deyilir.
Fərz edək ki, M1(x), M2(x), N1(y), N2(y) funksiyaları kəsilməzdir. Bu halda
M 1( x )N 1( y )dx+M2( x )N 2( y )dy=0 (4)
tənliyinə dəyişənlərinə ayrılan tənlik deyilir. Bu tənliyi həll etmək üçün onun hər
iki tərəfini N1(y) M2(x) 0 hasilinə bölək:
M1( x )M2 (x )
dx+N 2 ( y )N 1( y )
dy=0 .
Dəyişənlərinə ayrılmış bu tənliyin ümumi inteqralı
∫ M 1( x )M 2( x )
dx+∫ N 2( y )N 1( y )
dy=C (5)
olar. (4) tənliyinin (5) ümumi inteqralından alınmayan başqa həlləri də ola bilər.
Belə həllər N1(y) M2(x) = 0 bərabərliyinin ödənildiyi nöqtələr içərisində olar
(N1( y) = 0, M2(x) = 0).
Misal. x = 5, y = 1 başlanğıc şərtini ödəyən y '=1−x
2+ y diferensial tənliyinin
həllini tapmalı.
dydx=1−x
2+ y ,
(x – 1)dx + ( y + 2)dy = 0 ,
∫( x−1)d ( x−1)+∫( y+2)d ( y+2)=C 1 ,
( x−1)2+( y+2)2=C2
(C2=2C1 ).
Mərkəzi O(1,–2) nöqtəsində olan çevrələr. Xüsusi həlli tapaq üçün x = 5, y = 1
başlanğıc şərtlərdən istifadə edək:
(5−1 )2+(1+2 )2=C 2
, C2=25 .
Axtarılan xüsusi inteqral
( x−1)2+( y+2)2=25.
çevrəni müəyyən edir.
4. Bircins diferensial tənliklər.
Tərif 1. Əgər hər bir k ədədi üçün
f (kx , ky )=kn f ( x , y ) (1)
eyniliyi doğru olarsa, onda f ( x , y ) funksiyasına x və y dəyişənlərinə nəzərən n
dərəcəli bircins funksiya deyilir.
İndi isə
M ( x , y )dx+N ( x , y )dy=0 (2)
diferensial tənliyinə baxaq.
Tərif 2. Əgər x və y dəyişənlərinin diferensiallarının M (x, y) və
N (x, y) əmsalları eyni dərəcəli bircins funksiyalar olarsa, onda (2) tənliyi
birtərtibli bircins diferensial tənlik adlanır.
Bu tənliyi həll etmək üçün yx=z
, y = xz, dy = xdz + zdx əvəzləməsi vasitəsilə
onu dəyişənlərinə ayrılan tənliyə gətirmək lazımdır.
İndi tutaq ki, bircins diferensial tənlik aşağıdakı şəkildə verilmişdir
dydx=f (x , y )
. (3)
Əgər f ( x , y ) funksiyası x və y dəyişənlərinə nəzərən sıfır dərəcəli bircins
funksiya olarsa, yəni
f ( tx ,ty )=t0 f ( x , y )=f ( x , y )
şərti ödənilərsə, onda (3) tənliyi birtərtibli bircins diferensial tənlik olar.
Misal. x y '= y ln ( y
x ) diferensial tənliyinin ümumi həllini tapmalı.
x dydx= y ln ( y
x ) ,y ln( y
x )dx−xdy=0.
M ( x , y )= y ln( yx ) və N ( x , y )=−x birdərəcəli bircins funksiyalardır. Doğrudan da,
M (kx , ky )=ky ln ( kykx )=ky ln( y
x ) ,N (kx , ky )=−kx .
Tənliyi həll etmək üçun yx=z
, y = xz, dy = xdz + zdx əvəzləməsini aparsaq,
alarıq
xz lnz·dx-x(xdz+zdx)=0.
Buradan
xdz=z(lnz-1)dx,
x dzdx=z ( ln z−1)
,
dzz( ln z−1)
=dxx ,
d ( ln z−1)ln z−1
= dxx ,
ln ( ln z−1)= ln x+ lnC , ln z−1=Cx ,
ln z=Cx+1 , ln y
x=Cx+1
,
yx=eCx+1
.
Nəticədə baxılan tənliyin ümumi həlli y=xeCx+1 olar.
5.Birtərtibli xətti diferensial tənlik. Bernulli tənliyi.
Axtarılan funksiyaya və onun törəməsinə nəzərən xətti olan tənliyə birtərtibli
xətti diferensial tənlik deyilir və aşağıdakı kimi yazılır
y '+p ( x ) y=f (x ). (1)
f ( x ) 0 olduqda alınan
y '+p ( x ) y=0 (2)
tənliyinə (1) tənliyinə uyğun xətti bircins tənlik deyilir. f ( x )≠0 olduqda (1)
tənliyi xətti bircins olmayan diferensial tənlik adlanır. (1) tənliyini müxtəlif
üsullarla həll etmək olar. Bu üsullardan biri sabitin variasiyası üsuludur. Bu üsula
görə əvvəlcə xətti bircins tənliyin ümumi həlli tapılır. Alınan tənlik dəyişənlərinə
ayrılır
C 1 вя C 2
dyy=−p( x )dx .
Sonuncu tənliyi inteqrallasaq
ln|y|=−∫ p( x )dx+ln|C|,
buradan isə (2) tənliyinin ümumi həllini alarıq:
С2=С20
. (3)
İndi isə xətti bircins tənliyin (3) ümumi həllindəki ixtiyari C sabitini x-dən asılı F (x , y , y ' , y' ' )=0 funksiyası hesab edək:
С 1=С10 , (4)
y-in bu ifadəsini (1) tənliyində yerinə yazaraq sadə çevirmələrdən sonra alarıq
y ' '=f (x , y , y ' )
Buradan isə naməlum C(x) funksiyası tapılır
C ( x )=∫ f ( x )e∫ p(x )dx dx+C .
C(x)-in bu ifadəsini (4) bərabərliyində yerinə yazdıqda (1) tənliyinin ümumi həlli
alınar:
y=e−∫ p( x )dx [∫ f ( x )e∫ p ( x )dx dx+C ] .
Misal. y '− 2 x
x2+1y=x2+1
diferensial tənliyi həll edin.
Əvvəlcə bircins olmayan
y '− 2 xx2+1
y=x2+1 (5)
tənliyinin uyğun
y '− 2 xx2+1
y=0 (6)
bircins tənliyini həll edək.
y '=p( y ), dyy= 2 x
x2+1dx
,
dyy =
d (x2+1 )x2+1 ,
p dpdy=f ( y )
Axırıncı bərabərlikdən verilmiş bircins diferensial tənliyin ümumi həllini
tapırıq:p2
2=∫ f ( y )dy+C 1
2 . Burada C sabitini x-dən asılı pdp=f ( y )dy funksiyası hesab edək,
onda
y=C ( x )( x2+1) . (7)
y-in bu ifadəsini (5) tənliyində yerinə yazsaq alarıq
С '( x )( x2+1)+2 xC ( x )− 2 xx2+1
С ( x )( x2+1)=x2+1.
Buradan C'( x )=1 , yaxud C ( x )=x+C . Bu həlli (7) bərabərliyində yerinə
yazdıqda (5) tənliyinin həllini alarıq
∫ dy√2 f ( y )dy+C 1
=±( x+C 2). .
Bernulli tənliyi. Birtərtibli xətti tənliklərə gətirilə bilən bir növ tənlikdə
vardır, hansılara ki, Bernulli tənliyi deyilir. Bernulli tənliyi ümümi şəkildə
y ꞌ + p(x)y = q(x)y n , n 0;1 (8)
belə yazılır. Həmin tənlik z = y 1-n əvəzləməsi ilə xətti tənliyə gətirilir və daha
sonra alınmış birtərtibli xətti tənliyi ikinci y = u(x)v(x) əvəvzləməsi ilə həll
edirik.
Mövzu 31
Tam diferensiallı tənliklər. Yüksək tərtibli diferensial
tənliklər.
1. Tam diferensiallı tənliklər. İnteqrallatıcı vuruq.
2. Tənliyin tərtibinin azadılması halları.
3. Hasil və qismətin diferensialını daxilinə alan tənliklər.
1. Tam diferensiallı tənliklər. İnteqrallatıcı vuruq.
Tutaq ki,
p(x,y)dx + Q(x,y)dy = 0 (1)
diferensial tənliyin sol tərəfi hər hansı u(x,y) funksiyasının tam diferensialıdır. Onda bu diferensial tənlik tam diferensiallı adlanır.
Tam diferensiallıq. Tərifə əsasən
p(x,y)dx + Q(x,y)dy = du(x,y) = dudx dx + du
dy dy (2)
buradan.
p(x,y) = dudx , Q(x,y)= du
dy
Birinci bərabərlikdən y-ə, ikincidən x-ə nəzərən xüsusi törəmə alaq.
dpdy = d2u
dxdy , dQdx = d2u
dxdy
Şvars teoreminə görə
d2udxdy = d2u
dxdy
Odur ki,
dpdy = dQ
dx (3)
bərabərliyi (1) tənliyinin tam diferensiallıq şərti adlanır. Bu bərabərlik ödənildikdə axtarılan u(x) funksiyasını tapmaq olur. Onda (1) diferensial tənliyi du(x,y) = 0, bunun həlli isə u(x,y) = c olar.
Misal 1.
(3x2 + 6xy2)dx + (6x2y + 4y3)dy = 0
p = 3x2 + 6xy2 , Q = 6x2y + 4y3
dpdy = 12xy , dQ
dx = 12xy
Tam diferensiallıq şərti ödəndi. Odur ki,
dudx = 3x2 + 6xy2, hər tərəfi dx vurub inteqrallayaq:
∫ dudx
dx = ∫ (3 x 2+6 xy2 )dx
u(x,y) = x3 + 3x2y2 + φ(y)
(φ(y) hələlik məlum olmayan funksiyadır).
Hər tərəfdən y-ə nəzərən törəmə alaq.
dudy = 6x2y + φꞌ(y), du
dy = Q olduğundan
6x2y + 4y3 = 6x2y + φꞌ(y)
φꞌ(y) = 4y3 , φ(y) = y4
u(x,y) = x3 + 3x2y2 + y4
alınır və verilmiı tənliyin ümumi inteqralı.
x3 + 3x2y2 + y4 = c
Tutaq ki, (1) tənliyi tam diferensiallı deyil. Yəni 93) şərti ödənilmir. Bəzi hallarda elə μ(x,y) funksiyası tapmaq olur ki, (1) tənliyinə vurmaqla tənlik tam diferensiallı olur. Yəni
ddy
(μp )= ddx(μQ)
və ya
Qdμdx−¿ pdμ
dy = ( dpdy−dQ
dx ) μ,
buradan
Q dlnμdx−p dlnμ
dy=dp
dy−dQ
dx, (4)
Göründüyü kimi xüsusi törəməli diferensial tənlik alındı. Odur ki, xüsusi hallarda baxaq, hansı ki, inteqrallayıcı vuruğu nisbətən asan tapmaq olur
1) μ = μ(x) onda dμdy = 0 və (4) tənliyi
dlnμdx =
dpdy−dQ
dxQ
=h (x) (5)
şəklinə düşür. Inteqrallayıb, nəticədə
ln μ(x) = ∫ h ( x ) dx, μ(x)= e∫h ( x ) dx (6)
tapırıq.
Misal 2.
(2x2y + 2y + 5)dx + (2x3+ 2x)dx
(5) düsturunu tədbiq edək.
1Q ( dp
dy−dQ
dx ) = 12 x3+2x · (2x2 + 2 – 6x2 – 2) = h(x)
h(x) = - 4 x2
2 x3+2x = −2xx2+1 , demək
ln μ(x) = ∫ h ( x )dx = −∫ 2xx2+1
dx= −ln(¿ x2+1)¿ = ln (¿ x2+1)¿-1
μ(x) = 11+ x2 .
tənliyi μ(x)-ə vuraq
2 x2 y+2 y+5x2+1 dx + 2 x3+2x
x2+1 dy = 0
dudy=2 x3+2 x
x2+1 = 2x
dudy dy = 2xdy , u(x,y) = ∫2 xdy=2 xy+φ( x)
Buradan, dudy = 2y + φ ꞌ (x ) = 2 x2 y+2 y+5
x2+1 – 2y = 5
x2+1
φ ꞌ (x ) = 2 x2 y+2 y+5x2+1
−2 y= 5
x2+1
φ (x) = ∫ 5x2+1
dx=5arctgx.
Beləliklə, u(x,y) = 2xy + 5arctgx alınır.
Tənliyin ümumi inteqralı 2xy + 5arctgx = c ; x=0
2) μ = μ(x) olduqda, yəni
1p ( dQ
dx−dp
dy ) = λ(y) olduqda (4) tənliyindən
dlnμdy = λ(y) ; μ = e∫ λ ( y )dy (7)
Misal 3.
(2xy2 – 3y3)dx + (7-3xy3)dx
1p ( dQ
dx−dp
dy ) = −3 y2−4 xy+9 y2
2 xy2−3 y3 = −2y = λ(y);
μ = e∫ λ ( y ) dy = e−2∫ dxy = e-2 ln y = e ln y−2= y−2= 1
y2
2 x2−3 y3
y2 dx + 7−3 yx2
y2 dy = 0;
(2x – 3y)dx + ( 7y2−3 y)dy = 0
dudx = 2 x−3 y , du
dxdx=(2x−3 y )dx ,
u(x,y) = ∫ (2 x−3 y )dx=x2−3 xy−φ(x)
dudy=−3 x+φ ꞌ ( y )= 7
y2−3 x , φꞌ ( y )= 7y2 ,
φ ( y )=∫ 7y2 dy=−7
y u(x,y) = x2 −3 xy− 7y
x2 −3 xy− 7y=c .
Verilmiş tənliyin ümumi inteqralıdır.
2. Tənliyin tərtibinin azadılması halları.
Sərbəst dəyişəninə, axtarılan funksiyaya onun birinci və ikinci tərtib törəməsinə nəzərən tənliyə ikitərtibli diferensial tənlik deyilir. Bu tənliyi ümumi şəkildə aşağıdakı kimi yazmaq olar
F (x , y , y ' , y' ' )=0. (1) İkitərtibli diferensial tənliyi eyniliyə çevirən x məchulundan və iki sərbəst ixtiyari C 1 вя C 2 sabitlərindən asılı olan y=ϕ ( x ,C1 ,C2 ) funksiyasına bu tənliyin ümumi həlli deyilir.
(1) tənliyinin ümumi həllindən C1 və C2 ixtiyari sabitlərinin verilmiş С 1=С10 ,
С2=С20 qiymətlərində alınan y=ϕ ( x , C1
0 ,C20 ) həllinə (1) tənliyinin xüsusi həlli
deyilir.
Əgər F (x , y , y ' , y' ' )=0 tənliyi yüksək törəməyə nəzərən həll ediləndirsə, onda bu tənliyi
y ' '=f (x , y , y ' ) (2)şəklində göstərmək olar. Sadə inteqrallanan ikitərtibli diferensial tənliklərə elə tənliklər aiddir ki, (2) bərabərliyinin sağ tərəfində duran funksiya yalnız üç arqumentin birindən asılı olsun. I növ. Tutaq ki,
y ' '=f (x ). (3)Bu tənliyi inteqrallasaq alarıq
y '=∫ f ( x )dx+C 1 .
Yenidən inteqrallasaq nəticədə alarıq
y=∫ dx∫ f ( x )dx+C 1 x+C 2 ,
burada C 1 вя C 2– ixtiyari sabitlərdir və qeyri-müəyyən inteqrallar uyğun
funksiyaların ibtidai funksiyalarıdır. II növ. Tutaq ki,
y ' '=f ( y ). (4)Burada
y '=p( y )
götürsək ( p-yə y-dən asılı funksiya kimi baxsaq) alarıq
y ' '=d y '
dx=dp
dy⋅dy
dx=p dp
dy.
Nəticədə, (4) tənliyi aşağıdakı şəkilə düşər
p dpdy=f ( y )
.Dəyişənləri ayırsaq:
pdp= f ( y )dy .Sonuncu tənliyi inteqrallasaq alarıq:
p2
2=∫ f ( y )dy+C 1
2və ya
p=±√2∫ f ( y )dy+C1 .
p= dydx olduğundan əvvəlki tənliyi belə yazmaq olar:
dydx=±√2∫ f ( y )dy+C 1.
Buradan bir daha dəyişənləri ayıraraq və inteqrallayaraq sonda alarıq:
∫ dy√2 f ( y )dy+C 1
=±( x+C 2).
III növ. Tutaq ki,y ' '=f ( y' ). (5)
Burada y '=p( x ) götürək. Onda
y ' '=dpdx
olar və (5) tənliyi aşağıdakı şəkilə düşərdpdx=f ( p)
.Dəyişənləri ayıraraq inteqrallasaq:
dpf ( p )
=dx və
∫ dpf ( p )
=x+C1
.
Bu tənlikdən p=dy
dx kəmiyyətini müəyyən edərək ikinci dəfə inteqrallama yolu ilə y-ki də tapmaq olar.
Tərtibin azaldılması halları. İkitərtibli
y ' '=f (x , y , y ' ) (1)diferensial tənliyinin birtərtibli diferensial tənliyinə gətirildiyi aşağıdakı iki hala baxaq. I hal. Tutaq ki, (1) diferensial tənliyinin sağ tərəfində x dəyişəni aşkar şəkildə daxil deyildir, yəni tənlik
y ' '=f ( y , y ' ) (2)şəklindədir.Burada
y '=p( y ) və y ' '=dp
dx=dp
dy⋅dy
dx=p dp
dy
götürərək
p dpdy=f ( y , p)
birtərtibli diferensial tənliyi alarıq. Burada sərbəst dəyişən kimi y çıxış edir. II hal. Tutaq ki, (1) diferensial tənliyinin sağ tərəfində y dəyişəni aşkar şəkildə daxil deyildir, yəni tənlik
y ' '=f (x , y ' ) (3)şəklindədir. Burada
y '=p( x ) və y ' '=dp
dx
götürərək məchul p funksiyasının daxil olduğu birtərtibli diferensial tənlik alarıqdpdx=f ( x , p ).
Qeyd edək ki, yuxarıda baxılan II və III növləri (§ 6) (2) və (3) tənliklərinin xü-susi hallarıdır. Misal 1 .
y ' '= y¿
y (4)tənliyini həll edin.
Birinci hala görə y'=p və
y ' '=p dpdy götürək. Onda (4) tənliyi
p dpdy= p2
y
şəklinə düşər. Buradan:
1) p=0 , yəni y = C ;
2)
dpdy= p
y , yəni
dpp= dy
y və ln p= ln y+ ln C1 .
Potensiallasaq alarıq
p=dydx=C 1 y
və nəticədə,dyy=C1 dx .
İnteqralladıqdan sonra alarıqln y=C1 x+ ln C2
və deməli,y=C 2 eC1 x ,
burada C 1 вя C2 – ixtiyari sabitlərdir. Misal 2 .
x=1 olduqda y=1
2 və y '=1 başlanğıc şərtləri ödəyənx y ' '=2 x− y '
(5)tənliyinin həllini tapın.
(5) tənliyində y'=p və
y ' '=dpdx götürək. Onda
x dpdx=2 x−p ,
yaxud dpdx=2− p
x.
(6)
Alınan tənlik bircins tənlik olduğundan px=u
əvəzləməsi qəbul edək, nəticədə
p=xu вя dpdx=x du
dx+u .
(6) tənliyində yerinə yazsaq alarıq
x dudx+u=2−u
;buradan
dudx=2−2 u
x , və ya du
u−1=−2 dx
x.
İnteqrallasaq alarıqln (u−1)=−2 ln x+ lnC 1
və nəticədə,
u−1=C1
x2
, yəni px=1+
C 1
x2
və p=x+
C1
x .C 1 ixtiyari sabitini müəyyən etmək üçün verilmiş başlanğıc şərtləri (x = 1 olduqda p= y'=1) nəzərə alaq: 1=1+C 1, yəni C 1= 0 və beləliklə,
p=dydx=x .
Buradan alırıq dy=xdx və
y=∫ xdx= x2
2+C2
. (7)
C 2 sabitini başlanğıc şərtlərdən tapırıq. (7) düsturunda x = 1 və y=1
2 götürsək
alarıq 12=1
2+C2
, yəni C 2=0 . Nəticədə, axtarılan xüsusi həll y= x2
2 olar.
3. Hasil və qismətin diferensialını daxilinə alan tənliklər.
İndi isə funksiyaların hasilini və ya qismətini daxilinə alan iki növ tənliyə baxaq, həmin tənliklər aşağıdakı şəkildə yazıla bilər:
d(xy) = x dy + y dx; (1)
d( yx ) = xdy− ydx
x2 ; (2)
d( xy ) =
y dx−xdyy2 . (3)
Bu növ tənlikləri
xy = u, y = ux və ya y
x =u, y = ux
əvəvzləmələrin köməyi ilə asanlıqla həll etmək mümkündür. Həmin əvəzləmələrin tədbiqinə aid bir misala baxaq: Misal 1. (1) halına aid x2dy + xydx = dxtənliyi həll edin. Ortaq vuruğ kimi x məchulunu mötərizə xaricinə çıxaraq: x( xdy+ ydx )=dx .
Tənliyin hər iki tərəfini 1x ifadəsinə vuraq:
d(xy) = 1x
dx əvəzləmə
du = 1x
dx . y · x = u
Sonuncu tənliyi bircins tənlik kimi həll edək:
∫ du=∫ 1x
dx.
u = ln x ⇒yx = ln x + ln C = ln (Cx)
Burdan alırıq ki, tənliyin ümumi həlli
y = ln (Cx)x .
Misal 2. (2) halına aid
y2xdy – y3dx = x2dy
tənliyi həll edin. Ortaq vuruğ kimi y2 məchulunu mötərizə xaricinə çıxaraq:
1. İkitərtibli sabit əmsallı xətti bircins tənliklər.
2. İkitərtibli sabit əmsallı xətti bircins olmayan tənliklər.
3. Sabit əmsallı xətti diferensial tənliklər üçün sabitlərin variyasiyası metodu (Laqranj üsulu).
4. Xətti bircins sabit əmsallı diferensial tənliklər sistemi.
1. İkitərtibli sabit əmsallı xətti bircins tənliklər.
Tutaq ki, ikitərtibli xətti bircins y + py + qy = 0 (1)
tənliyi verilmişdir, burada p, q əmsalları sabit ədədlərdir. Bu tənliyin həlli y=ekx
şəklində axtarılır, burada k axtarılan sabit ədəddir. Onda
y '=kekx , y ' '=k2 ekx.
Törəmələrin bu qiymətlərini (1) tənliyində yerinə yazaq
ekx(k2+pk+q) = 0,
burada ekx0 olduğundan alırıq ki,
k 2+ pk+q=0 . (2)(2) tənliyinə (1) diferensial tənliyinin xarakteristik tənliyi deyilir. Bu tənlikdən k-nı tapaq
k1,2=−p2±√ p2
4−q .
(3)Burada aşağıdakı hallar mümkündür.1. Əgər (2) xarakteristik tənliyinin k1 və k2 kökləri həqiqi və müxtəlifdirsə, onda
y1=ek1 x
və y2=ek2 x
funksiyaları xüsusi həllərdir. Deməli, (1) tənliyinin ümumi həlli aşağıdakı düsturla ifadə olunur:
y = C1ek 1x
+C2ek 2x
. (4)
2. Əgər (2) xarakteristik tənliyinin kökləri həqiqi və bərabərdirsə (k1 = k2 ), onda (1) tənliyinin ümumi həlli aşağıdakı düsturla ifadə olunar:
y=C 1 ek1x+C 2 xe
k 1 x=e
k1 x(C 1+C2 x ) (5)
3. Əgər (2) xarakteristik tənliyinin k1 və k2 kökləri kompleks olarsa ( k1 = +i , k2 = –i), onda (1) tənliyinin ümumi həlli
y=eαx(C1 cos βx+C 2 sin βx ) (6)şəklində olur.
2. İkitərtibli sabit əmsallı xətti bircins olmayan tənliklər.
Qeyri-məlum əmsallar üsulu.
Tutaq ki, bircins olmayan ikitərtibliy ' '+ p y '+qy= f ( x ) (1)
tənliyi verilmişdir, burada p, q əmsalları sabit ədədlər, f ( x )– məlum funksiyadır. Aşağıdakı teorem doğrudur. Teorem 1. Bircins olmayan (1) tənliyinin ümumi həlli
y ' '+ p y '+qy=0 (2)bircins tənliyinin ( f ( x )=0 ) ümumi həlli ilə verilən bircins olmayan (1) tənliyin xüsusi həllinin cəminə bərabərdir. İsbatı . Əgər y0 bircins (2) tənliyinin ümumi həlli və y* uyğun bircins olmayan (1) tənliyinin xüsusi həllidirsə, onda
y0' '+ p y0
' +qy0=0 və y*+ py*+qy* =f ( x ). Bu iki tənliyi tərəf-tərəfə toplasaq və cəmin törəməsinin törəmələrin cəminə bərabər olduğunu nəzərə alsaq
(y0 + y*)+ p( y0 + y*)+q( y0 + y*) =f ( x ).
Buradan aydındır ki, y = y0 + y* (3)
funksiyası (1) tənliyinin ümumi həlli olacaq. Teorem 2. Tutaq ki, bircins olmayan
y + py + qy = f1(x) + f2(x) (4)
tənliyinin sağ tərəfi f1(x) və f2(x) funksiyalarının cəmidir. Əgər y1
y + py + qy = f1(x)tənliyinin xüsusi həlli və y2 isə
y + py + qy = f2(x)tənliyinin xüsusi həllidirsə, onda y1 + y2 cəmi verilmiş (4) tənliyinin xüsusi həl-lidir. Biz sabit əmsallı xətti bircins tənliyin ümumi həllini tapa bilirik. İndi isə uyğun bircins olmayan (1) tənliyinin xüsusi həllinin tapılma üsulunu göstərək. Qeyd edək ki, f ( x ) funksiyasının bəzi xüsusi şəkilləri üçün xüsusi həlli qeyri-müəyyən əmsallar üsulu ilə tapmaq olar.Aşağıdakı sadə hallarda tənliyin sağ tərəfindəki f ( x ) funksiyasının şəklinə görə (1) tənliyinin y* xüsusi həllinin şəklini əvvəlcədən göstərmək olar.
1-ci hal . f ( x )= P(x), burada P(x) – çoxhədlidir. Bu halda, əgər xarakteristik tənliyinin kökü sıfra bərabər olmazsa, onda y* xüsusi həlli P(x) ilə eyni tərtibə malik olan Q(x) çoxhədlisi şəklindədir; əgər sıfır ədədi xarakteristik tənliyin r dəfə təkrarlanan kökü olarsa, onda y* = xrQ(x).
2-cü hal . f ( x )= emxP(x). Burada P(x) müəyyən dərəcəli çoxhədlidir. Bu halda əgər m ədədi xarakteristik tənliyin kökü olmazsa, onda y*=emxQ(x) və əgər m xarakteristik tənliyin r dədə təkrarlanan kökü olarsa, y*=xremxQ(x) olar. Bu-rada Q(x) çoxhədlisi P(x) ilə eyni dərəcəli çoxhədlidir.
Xüsusi hal. f ( x )= aemx (a, m – sıfırdan fərqli müəyyən ədədlərdir). Bu halda əgər m xarakteristik tənliyin kökü olmazsa, onda y*=Aemx və əgər m xarakteristik tənliyin r dəfə təkrarlanan kökü olarsa, onda y*=Axremx olar. Bu-rada A axtarılan əmsaldır.
3-cü hal . f ( x )=eαx (P( x )cos βx+Q( x )sin βx ). Bu halda əgər α±βi ədədləri
xarakteristik tənliyin kökləri olmazsa, onda
y¿=eαx (A ( x )cos βx+B (x )sin βx )
və əgər α±βi ədədləri xarakteristik tənliyin kökləri olarsa, onda
y¿=xeαx( A ( x )cos βx+B( x )sin βx ). Burada A( x ) və B( x )çoxhədlilərin dərəcəsi P( x ) və Q( x ) çoxhədlilərin dərəcəsinin ən böyüyünə bərabərdir.
Xüsusi hal . f ( x )=eαx (a cos βx+b sin βx ) (a, b, , – sıfırdan fərqli müəyyən ədədlərdir). Bu halda əgər α±βi ədədləri xarakteristik tənliyin kökləri olmazsa, onda
y¿=eαx (A cos βx+B sin βx )
və əgər α±βi ədədləri xarakteristik tənliyin kökləri olarsa, onda
y¿=xeαx( A cos βx+B sin βx ).Burada A və B axtarılan əmsallardır.
3. Sabit əmsallı xətti diferensial tənliklər üçün sabitlərin
variyasiyası metodu (Laqranj üsulu).
Sabitlərin variyasiya metodunun tədbiqini xətti diferensial tənliklərin bir gədər ümumi halı üçün araşdıraq. Yəni ümumi hal olaraq həmin üsulun dəyişən əmsallı xətti diferensial tənlikləri üzərində öyrənək, çünki buradan asanlıqla həmin metodun sabit əmsallı olan tənliklər üçün istifadəsini göstərmək mümkündür.
Daha aydın olsun deye ikitərtibli xətti tənliyə baxaq:
yꞌꞌ + p1(x)yꞌ + p2(x)y = f(x), (1)
yꞌꞌ + p1(x)yꞌ + p2(x)y =0. (2)
Bilirik ki, ikinci tənlik birinci tənliyə uyğun olan bircinsli tənliyidir.
Fərz edək ki, ikinci tənliyin ümumi həllini
y = c1y1 + c2y2 (3)
kimi götürək.
Burada c1 və c2 ixtiyari sabitlər, y1(x) və y2(x) isə (2) tənliyinin xətti asılı olmayan xüsusi həllidir. Belə olan halda sabit əmsallı xətti diferensial tənliyin qeyri-bircins halı üçün Laqranj metoduna görə aşağıdakı şəkildə axtarmaq əlverişlidir:
y =Ay1 + By2 (4) Burada A və B aşağıda verilən tənliklər sistemini ödəyən x-dəyişənindən asılı olan axtarılan fuksiyalardı: A(x) və B(x):
A ꞌ ( x ) · y1+B ꞌ ( x ) · y2=0
A ꞌ ( x ) · y ꞌ 1+B ꞌ ( x ) · y ꞌ 2=f (x) (5)
Alınan tənliklər sistemini Kramer üsulu ilə həll etmək üçün əvvəlcə sistemin ω əsas determinantını hesablayaq və determinantın 0 ədədindən fərgli olmasını yoxlayaq:
ω = y1 y2
y ꞌ 1 y ꞌ 2 (6)
Determinantın 0-dan fərgli olan halda axtarılan A ꞌ ( x ) və Bꞌ ( x ) funksiyaları aşağıdakı işadələrə görə tərtib edirik:
A ꞌ ( x ) = − y2 f (x)
ω , Bꞌ ( x ) = y1 f (x)
ω (7)
Daha sonra A(x) və B(x) funksiyalarını tapmaq üçün (7) bərabərliklərin hər iki tərəfini inteqrallayırıq. Xüsusi olaraq qeyd edək ki, Laqranj üsulundan sabit əmsallı xətti qeyri-bircins diferensial tənliklərinin sərbəst hədləri üstlü funksiya, çoxhədli və xüsusi olaraq triqonometrik polinomdan fərgli olan hallarda istifadə etmək zəruri və əlverişlidir. Misal. Tənliyi sabitlərin variyasiyası metodunun köməyi ilə həll edin:
yꞌꞌ + yꞌ = 11+ex . Tənliyin sağ tərəfi kəsr-rasional ifadə oduğundan Laqramj
üsulundan istifadə edilmıəsi məsləhətdidir: I addım. Tənliyin xarakteristik tənliyini tərtib edək və onun xətti əsılı olmayan xüsusi həllərini tapaq:
k2 + k = 0, k1 = 0, k2 = 1.Onda uyğun olaraq xüsusi həllər: y1 = 1, y2 = e-x .
II addım. Aꞌ(x) və Bꞌ(x) funksiyalarına görə sistem tərtib edək və onun əsas determinantını hesablayaq:
A ꞌ ( x ) · y1+B ꞌ ( x ) · y2=0
A ꞌ ( x ) · y ꞌ 1+B ꞌ ( x ) · y ꞌ 2=1
1+ex
ω = y1 y2
y ꞌ 1 y ꞌ 2 = 1 e−x
0 −e− x = −e− x .
III addım. A ꞌ ( x ) üçün alırıq:
A ꞌ ( x ) = − y2 f (x)
ω = −e− x
(−e¿¿−x )· 11+ex ¿
= 11+ex
İndi isə A(x) funksiyasını tapaq:
A(x) = ∫ dx1+ex + C1 .
Bu inteqralı ex = t; x = ln t; dx = d(ln t) = 1t dt əvəzləmənin köməyi ilə qeyri-
məlum əmsallar üsulu ilə həll edirik:
A(x) = ∫ dtt (t+1) + C1 = ∫ D
tdt+ P
t+1dt+C1.
Bunun üçün D və P əmsallarına görə sistem tərtib edirik və həmin sistemindən D=1 və P=-1 alaraq:
Bu inteqralı e -x= t; -x = ln t; dx = d(-ln t) = - 1t dt əvəzləmənin köməyi ilə qeyri-
məlum əmsallar üsulu ilə həll edirik:
B (x ) = −x−ln (1+e− x) + C2 (2)
V addım. Nəhayət tənliyin ümumi həllini tərtib edək:
Yümumi = (x - ln(ex+1) + C1) + e− x · (−x−ln (1+e− x) + C2) = sadələşdiriləndən sonra = x + C1 + C2 · e− x – ln(ex+1) · (1+e¿¿−x)¿ .
4. Xətti bircins sabit əmsallı diferensial tənliklər sistemi.
Belə tənliklər sisteminin ümumi şəklini aşağıdakı kimi verə bilərik:
dx i
dt = ∑j=1
n
aij x j, i = 1 , n (1)
Burada a ij – sabit ədədlər, x j= x j(t) – məchul funksiyalardır. Bu tənliklər sisteminin həlli elə
x1 = φ1(t), x2 = φ2(t), ..., xn = φn(t) (2)
funksiyalar külliyatına deyilir ki, onları sistemə yazdıqda sistemin hər tənliyi verilmiş intervalda eynilitə çevrilsin. Həlli üçün başlanğıc şərtləri verilərsə məsələyə sistemin Koşi məsələsi deyilir. Koşi məsələsinin köməyi ilə biz n-sayda ixtiyari c1, c2,...,cn sabitlərinin xüsusi qiymətləri tapılır. (1) sisteminin həlli üçün bir çox metodlar mövcuddur. Onlardan biri verilmış tənliklər sistemini n-tərtibli bir xətti diferensial tənliyə qətirilməsi üsuludur. Həmin üsula aid n = 2 sayda tənliklər sisteminə baxaq:
dxdt = x – 2y
dydt = x + 3y (1)
Sisteminin ikinci tənliyini t-yə nəzərən diferensiallayaq və birinci tənliyi nəzərə alaq.
d2 ydt 2 = dx
dt + 3dydt = x – 2y + 3dy
dt
İkinci tənlikdən x = dydt – 3y (2) tapıb, burada yerinə yazaq
d2 ydt 2 = dy
dt – 3y – 2y +3dydt
və ya
d2 ydt 2 = 4dy
dt + 5y = 0
n = 2 tərtibli sabit əmsallı bircins tənlik alındı. Bu tənliyi həll edək:
r2 – 4r + 5 = 0, r1,2 = 2 i
Məlumdur ki, xarakteristik tənliyin kökləri α ± iβ olduqda bu köklərə uyğun xüsusi həllər y1 = eαxcosβx, y2 = eαx sinβx şəklində olur. Bizim baxdığımız misalda α=2 , β=1 , x=t olduğundan
y1 = e2 t cos t, y1 = e2 t sin t
və ümumi həll y = (c1cost + c2sint)e2 t
olar. y-ın bu qiymətini (2)-dən yazmaqla
x = dydt – 3y = (-c1sint + c2 cost - c1cost - c2sint)e2 t
və ya x = [(c2-c1)cost – (c1+c2)sint]e2 t.
Beləliklə, verilmiş (1) sisteminin ümumi həlli
x(t) = (c2-c1)e2 tcost - (c1+c2)e2 tsint
y(t) = (c1 cost + c2 sint)e2 t (3)
düsturları ilə təyin olunmuş olur.
Mövzu 33
Ədədi sıralar, onların yığılması. Yığılan sıraların xassələri.
Müsbət hədli sıralar və onların yığılma əlamətləri.
1. Əsas anlayışlar və ümumi teoremlər.
2. Sıranın yığılmasının zəruri əlaməti. Müsbət hədli
Onda bu sıranı istənilən tərtibdən hədbəhəd diferensiallamaq olar:
f '( x )=a1+2 a2( x−a)+3 a3( x−a )2+. . .+nan ( x−a )n−1 ,f ' ' ( x )=2a2+2⋅3 a3( x−a )+3⋅4 a4( x−a)2+4⋅5 a5( x−a )3+.. . ,
f ' ' '( x )=2⋅3 a3+2⋅3⋅4 a4 (x−a )+3⋅4⋅5 a5 (x−a )2+ .. . ,f IV ( x )=2⋅3⋅4 a4+2⋅3⋅4⋅5 a5( x−a )+.. . .
. . . . . . . . . . . . . . . . . . . .
Bu bərabərliklərdə və (2)-də x-in yerinə a yazdıqda:
f (a )=a0 , f'( a)=a1 , f
' ' (a )=1⋅2⋅a2 , f' ' ' (a )=1⋅2⋅3⋅a3 ,
f IV(a)=1⋅2⋅3⋅4⋅a4 , …
buradan
a0= f (a ),
a1=f ' (a )
1 , a2=
f ' ' (a)1⋅2
=f ' ' (a )
2! , (3)
a3=f ' ' '( a)1⋅2⋅3
=f ' ' '( a)
3 ! , a4=
f IV( a)1⋅2⋅3⋅4=
f IV (a )4 !
, …
a0 , a1 , a2 ,. .. əmsallarının tapdığımız bu qiymətlərini (2) düsturunda yerinə yazsaq alarıq
f ( x )=f (a )+ f ' (a )1 !
( x−a )+ f ' ' (a )2!
( x−a )2+. ..
. ..+ f (n)(a)
n!( x−a )n+. . .
(4)
Bu bərabərliyin sağ tərəfindəki sıra Teylor sırası adlanır. (4) bərabərliyi f ( x ) funksiyasının a
nöqtəsində Teylor sırasına ayrılışıdır. (3) ədədlərinə Teylor əmsalları deyilir.
Xüsusi halda, a = 0 olduqda Teylor sırası
f ( x )= f (0 )+ f ' (0)1 !
x+ f ' ' (0)2!
x2+f ' ' ' (0)
3 !x3+.. .+ f (n)( 0)
n !xn+ .. .
şəklinə düşür. Bu bərabərliyin sağ tərəfindəki sıra Makloren sırası adlanır, bərabərlik isə
f ( x )funksiyasının Makloren sırasına ayrılışıdır.
2. Elementar funksiyaların Makloren sırasına ayrılması.
I. f ( x )=e x funksiyasının ayrılışı. Ardıcıl törəmələri və onların xüsusi
qiymətlərini tapaq:
f ( x )=e x, N ( x , y )=1;
f '( x )=ex, f '( 0)=1 ;
M ( x , y )=f (x , y ), f ' ' (0 )=1 ;
f ( x , y )dx−dy=0 , f (n)(0 )=1 ; …
Bu qiymətləri Makloren sırasında yerinə yazdıqda, nəticədə alarıq:
e x=1+ x1+ x2
2!+ x3
3 !+. ..+ xn
n !+. ..
II. f ( x )=sin x funksiyasının ayrılışı.
f ( x )=sin x ,dydx=f (x , y ) ,;
f '( x )=cos x , M ( x , y )dx+N ( x , y )dy=0;
f ' ' ( x )=−sin x , f ' ' (0 )=0 ;
f ' ' ' ( x )=−cos x , M 0( x0 , y 0);
f IV(x )=sin x , f IV(0)=0 ; …
x=x0
III. f ( x )=cos x funksiyasının ayrılışı.
cos x=1+∑n=1
∞(−1)n x2n
(2 n) !=1− x2
2 !+ x4
4 !− x6
6 !+. . .
IV. y=ϕ ( x ) funksiyasının ayrılışı.
(1+x )m=1+ m1!
x+m(m−1 )2!
x2+.. .+m(m−1)(m−2 ). ..(m−n+1)n!
xn+.. .
V. f ( x )= ln(1+x ) funksiyasının ayrılışı.
y= y0
Mövzu 36
Əsas anlayışlar. Cismin rəqs tənliyi.
1. Əsas anlayışlar və təriflər.
2. Tənliklərin həlli haqqında, sərhəd şərtlər.
3. Simin rəqs tənliyi.
4. Simin rəqs tənliyi üçün başlanğıc və sərhəd şərtləri.
5. Sonlu simin sərbəst rəqs tənliyinin Furye üsulu ilə həlli.
1. Əsas anlayışlar və təriflər.
Birdəyişənli məchul funksiya və onun müxtəlif tərtibli törəmələri daxil olan hər
bir bərabərlik adi diferensial tənlik adlanır. Belə tənliklər və onların müxtəlif
həlli üsulları XXX – XXXIV fəsillərdə öyrənilmişdir.
Bu fəsildə çoxdəyişənli məchul funksiya və onun müxtəlif tərtibli xüsusi
törəmələri daxil olan diferensial tənliklər öyrənilir. Onlara xüsusi törəməli
diferensial tənliklər deyilir. Burada, fizika, mexanika və texnika məsələlərinin
həlli ilə bağlı olan ikitərtibli xüsusi törəmələr konkret diferensial tənliklər tədqiq
edilir. Belə tənliklərər riyazi fizika tənlikləri deyilir.
Diferensial tənliyə daxil olan törəmələrin ən yüksək tərtibli həmin tənliyin
tərtibi adlanr. Məsələn, məchul U funksiyası iki x və y dəyişənindən asılı olduqda
δUδx=0 , δU
δy=f ( y ) , x δU
δx+ y δU
δy=0 ,…
tənlikləri birtərtibli,
δ2 Uδxδy
=0 , δ 2Uδ x2 +
δ 2Uδ y2=0 , δ2 U
δ x2 −δUδy=0 ,…
Tənlikləri isə ikitərtibli diferensial tənliklərdir. Bu halda, ikitərtibli xüsusi
törəməli diferensial tənliyin uyumu şəkli
F=( x , y ,U , δUδx
, δUδy
, δ 2Uδ x2 , δ 2U
δxδy, δ2 U
δ y2 )=0 (1)
kimi yazılır. Tənlikdə iştirak edən bütün törəmələr bir dərəcəli olduqda (1)
bərabərliyi ikitərtibli xətti diferensial tənliyə çevrilir:
A ( x , y ) δ2 Uδ x2 +2 B (x , y ) δ 2U
δxδy+C ( x , y ) δ2U
δ y2 +2 D ( x , y ) δUδx+¿
+2 E ( x , y ) δUδy+G ( x , y )U=f (x , y ) (2)
Tənliyin sağ tərəfi sıfra bərabər olduqda ( f (x , y )≡ 0) alınan
A ( x , y ) δ2 Uδ x2 +2 B (x , y ) δ 2U
δxδy+C ( x , y ) δ2U
δ y2 +2 D ( x , y ) δUδx+¿
+2 E ( x , y ) δUδy+G ( x , y )U=0 (3)
bərabərliyinə ikitərtibli xətti bircinsli diferensial tənlik deyilir. U ≡0 funksiyası
(3) xətti bircinsli diferensial tənliyini ödəyir, yəni onun həllidir.
L. Eyler göstərmişdir ki, x və y dəyişənlərin yeni 𝜉 və η dəyişənləri ilə
x=φ (ξ ,η), y=ѱ (ξ ,η) kimi əvəz etməklə, (2) şəklində hər bir tənliyi aşağıdakı üç
şəkildən birinə gətirmək olar:
1. Elliptik tipli tənliklər
δ2 Uδ ξ2 +
δ2Uδ η2 =F1(ξ ,η ,U , δU
δξ, δU
δη) (4)
kanonik şəklində;
2. Qiperbolik tipli tənliklər
δ 2Uδξδη
=F2(ξ , η ,U , δUδξ
, δUδη) (5)
kanonik şəklində;
3. Parabolik tipli tənliklər isə
δ2 Uδ η2 =F3(ξ , η , U , δU
δξ, δU
δη) (6)
kanonik şəklinə gətirilir.
Yeni funksiyalar daxil etmıklə (4) – (6) tənlikləri çox vaxt uyğun olaraq aşağı-
dakı daha sadə şəkillərə gətirilir (a - sabit ədəddir):
δ2 Uδ ξ2 +
δ2Uδ η2 +aU=ϕ1(ξ , η) (elleptik),
δ2 Uδ ξ2 −
δ2 Uδ η2 +aU=ϕ2(ξ , η) (hiperbolik),
δ2 Uδ ξ2 −
δUδη=ϕ3(ξ ,η) (parabolik).
2. Tənliklərin həlli haqqında, sərhəd şərtlər.
Verilmiş diferensial tənliyi müəyyən oblastda eyniliyə çevirən hər bir
funksiya həmin tənliyin həlli və ya inteqralı adlanır. Ai diferensial tənliklər kimi,
xüsusi törəməli diferensial tənliklərin də, ümümiyyətlə, sonsuz sayda həlli vardir.
Lakin adi diferensial tənliyin ümumu həlli tənliyin tərtibi sayda ixtiyari
sabitdən(parametrdən) asılı olduğu halda, xüsusi törəməli tənliyin ümumu həlli
tənliyin tərtibi sayda ixtiyari funksiyadan asılı olur. Məsələn,
δUδx=0 (1)
tənliyinin ümumu həlli U (x , y)=φ( y ) şəklində funksiyadır. Burada φ ( y) ilə y-dən
asılı olan ixtiyari funksiya işarə edilmişdir.
δUδy=f ( y) (2)
tənliyinin ümumu həlli də ixtiyariφ ( y) funksiyası vasitəsilə yazılmış
U (x , y)=∫ f ( y )dy+¿¿ φ (x) (20 ¿
şəklində funksiyadır. Buna inanmaq üçün (20¿ bərabərliyinin hər iki tərəfini y-ə
nəzərən diferensiallamaq kifayətdir.
İkitərtibli xətti
δ2 Uδxδy
=0 (3)
diferensial tənliyinin ümumu həlli iki ixtiyari funksiyadan asılıdır. Dogrudan da, δUδy=V əvəzləməsini apardıqda (3) tənliyi (1) şəklundə tənliyə çevrilir:
δ2 Uδxδy
= δδx ( δU
δy )= δVδx=0.
Bu tənliyin ümumu həlli ixtiyari φ ( y) funksiyasıdır:V=φ( y ). Onda (3) tənliyinin
ümumu həlli δUδy=φ( y ) tənliyinin həlli olar. (2) şəklində olan sonuncu tənliyin
ümumu həlli isə
U ( x , y )=∫φ ( y )dy+¿ѱ (x)¿
şəklində funksiyadır. Burada φ ( y ) və ѱ (x ) ixtiyari funksiyalar olduğdan sonuncu
bərabərliyi
U ( x , y )=ϕ ( x )+ѱ (x ) (4)
kimi yazmaq olar. Sağ tərəfdə iştirak edən ϕ ( x ) funksiyası, ixtiyari φ (x)
funksiyasının inteqralı olduğundan, o da hər hansı ixtiyari funksiyadır.
Deməli ikitərtibli (3) tənliyinin ümumi həlli olan (4) funksiyası iki ixtiyari ϕ ( x )
və ѱ (x ) funksiyalarından asılıdır.
Xüsusi törəməli diferensial tənliklərin, ümumiyyətlə, sonsuz sayda həlli
vardır. Onların xətti asılı olmayan həlləri belə sonsuz sayda ola bilər. Bu həllər
içərisindən tələb olunanını, yəni qoyulan konkret məsələnin həllini ayırmaq üçün
müəyyən əlavə çərtlər verilməlidir. Tənliyin növündən asılı olaraq bu əlavə
şərtlər müxtəlif ola bilər.
Verilmiş tənlikdə zamanı göstərən koordinat iştirak etdikdə (belə tənliyə gətir-
ilən məsələyə riyazi fizikanın dinamik məsələsi deyilir) əlavə olaraq başlanğıc
şərtlər verilir. Bu halda axtarılan funksiyanın t=0 başlanğıc anda qiyməti (tən-
likdə zamana görə birtərtibli törəmə iştirakl etdikdə) və həm də onun dəyişmə
sürətinin başlanğıc anda qiyməti (tənlikdə zamana görə ikitərtibli törəmə iştirakl
etdikdə) verilə bilər. Bir sıra tənlikləri həll edərkən başlanğıc çərtlərdən başqa
baxılan oblastın sərhədində də şərtlər (sərhəd şərtləri) verilir. Sərhəd şərtləri
olaraq axtarılan funksiyanın özünün və onun sərhədin normalı üzrə törəməsinin
sərhəddə qiymətləri və ya onların müəyyən kombinasiyası verilə bilər. Tənlikdə
zaman iştirak etdikdə (belə tənliyə gətirilən məsələyə riyazi fizikanın stasionar və
ya statik məsələsi deyilir) onu həll edərkən ancaq sərhəd şərtləri verilir.
3. Simin rəqs tənliyi.
Riyazi fizikada sim dedikdə uzunluğu başqa ölçülərinə nəzərən çox böyük olan
cisim nəzərdə tutulut. Tutaq ki, tarım çəkilmiş elastiki simin ucları Ox oxunun
x = a və x = b nöqtələrinə bərkidilmişdir.
u
M1 M2 φ T
T
0 a x x+∆x b x
Hər hansı xarıcı qüvvənin təsiri ilə simi bu müvazinət halından çıxardaraq
onun nöqtələrinə başlanğıc sürət verək. Xarici qüvvənin təsirini kəsdikdə sim
özbaşına müəyyən hərəkət edər. Bu halda deyillər ki, sim rəqsi hərəkət edir. Bu-
rada simin elə rəqsi hərəkətinə baxılır ki, bu hərəkət zamanı onun bütün nöqtələri
Ox oxuna perpendikulyar istiqamətdə eyni bir müstəvi üzərində yerləşir. Simin
belə hərəkətinə onun eninə rəqsi deyilir.
Burada əsas məsələ, simin eninə rəqsi zamanı istənilən anda onun formasına və
nöqtələrinin zamandan asılı olan hərəkət qanununu təyin etməkdən ibarətdir.
Simin, absisi x olan nöqtəsinin Ox oxundan t anında meylini U(x, t) ilə işarə et-
sək, onda U = U(x, t) funksiyasının (OxU) koordinat sistemində qrafiki rəqsi
hərəkətdə olan simin t anında formasına göstərər. Bu halda, absisi x olan nöqtənin
hərəkət sürəti δUδt=U t
ꞌ (x , t) və bu hərəkətin təcili δ2 Uδ t2 =U tt
ꞌꞌ (x , t) olar.
Fərz edək ki, simin M1 M2 hissəsinin elə kiçik rəqslərinə baxılır ki, bu hərəkət
zamanı onun uzunluöunun dəyişməsini nəzərə almamaq olar. Bu halda, simin
[ x , x+∆ x ] parçasına uyğun olan M1 M2 hissəsinin uzunluğu hərəkət zamanı yenə də
∆ x−¿ə bərabər olur: qövs ˘M 1 M 2 ≈ ∆ x. Bundan başqa, qəbul edək ki, istənilən anda
simin bütün nöqtələrində dartılma (gərginlik) eynidir və yaranan gərginlik
qüvvəsi onun toxunanı istiqamətində yönəlmişdir. M1 M2 hissəsinin uclarına simə
toxunan istiqamətdə skalyar qiyməti N olan gərginlik qüvvəsi təsir edir. M 1T
gərginlik qüvvəsinin M2 nöqtəsində Ox oxunun müsbət istiqaməti ilə əmələ
gətirdiyi bucaq φ olsa, onda
tg φ= δU (x+∆ x ,t )δx
və həmin qüvvənin OU oxu üzərinə proyeksiyası
PrOU M 1T=N sin φ (1)
olar. Simin kiçik rəqslərinə baxıldığından sin φ ≈ tg φ qəbul etmək mümkündür.
Onda, simin hərəkət tənliyini almaq üçün M1 M2 hissəsinə təsir edən qüvvələrin
cəmini onun kütləsinin hərəkətin təcili hasilinə bərabər etmək lazımdır (Nyuton
qanunu). Simin xətti saflığını ρ ilə işarə etsək, onda M1 M2 hissəsinin kütləsi ρ ∆ x
olar. Beləliklə, simin hərəkət tənliyi
ρ ∆ x δ 2Uδ t 2 =N δ 2U
δ x2 · ∆ x
və ya hər iki tərəfi ∆ x−¿ə ixtiyar etməklə
δ2 Uδ t2 =a2 δ2 U
δ x2 (a2= N
ρ) (2)
şəklində alınır. (4) tənliyinə simin eninə sərbəst rəqslərinin tənliyi və ya birölçülü
dalğa tənliyi deyilir.
Sim xarici qüvvənin təsiri ilə rəqs etdikdə onun hərəkət tənliyi
δ2 Uδ t2 =a2 δ2 U
δ x2 + f (x , y) (3)
kimi yazılır. (3) tənliyi simin məcburi rəqsinin tənliyi adlanır.
Simin eninə sərbəst rəqslərinin (2) tənliyi ikitərtibli xətti bircins, (3) tənliyi isə
ikitərtibli xətti bircinsli olmayan diferensial tənlikdir.
4. Simin rəqs tənliyi üçün başlanğıc və sərhəd şərtləri.
Simin eninə sərbəst rəqslərinin
δ2 Uδ t2 =a2 δ2 U
δ x2 (1)
tənliyinin sonsuz sayda həlli vardır. İki ixtiyari funksiyadan asılı olan bu həllər
simin sonsuz sayda rəqsi hərəkəti olduğunu göstərir.
(1) tənliyinin müəyyən həllini almaq, yəni onun ümumi həllindən müəyyən xü-
susi həllini ayırmaq üçün əlavə şərtlər verilməlidir. Əlavə şərtlər iki növ olur:
başlanğıc şərtlər və sərhəd şərtləri.
Başlanğıc şərtləri simin rəqsə anda vəziyyətini göstərir. Tutaq ki, sim t = 0
anında rəqsə başlamışdır. Onda onun bu başlanğıc anda forması bir f (x)
funksiyası vasitəsilə təyin olunar:
U ( x , t )t=0=U ( x , 0 )=f (x ). (2)
Simin nöqtələrinin hərəkətinə başlanğıc anda verilən sürət bir F(x) funksiyası
vasitəsilə təyin olunur:
δU (x , t)δt t=0
=U tꞌ ( x , 0 )=F ( x ) . (3)
Tərif 1. (2) və (3) şərtləri (1) tənliyi üçün başlanğıc şərtlər adlanır. (1) tən-
liyinin (2) və (3) başlanğıc şərtlərini ödəyən həllinin tapılmasına həmin tənlik
üçün Koşi məsələsi deyilir.
Sərhəd şərtləri rəqs zamanı baxılan oblastın sərhəd nöqtələrində simin
vəziyyətini göstərir. Simin sol ucu x = a nöztəsinə və sağ x = b nöztəsinə
bərkidildikdə rəqs zamanı bu nöqtələr hərəkət etmir. Buna görə də simin üç
nöqtələrinin Ox oxundan olan meyli sıfra bərabər olur:
U ( x , t )x=a=U (a ,t )=0
U ( x , t )x=b=U (b ,t )=0 . (4)
Tərif 2. Bu şərtlərə (1) tənliyi üçün sərhəd şərtləri deyilir. (1) tənliyinin (2), (3)
başlanğıc və (4) sərhəd şərtlərini ödəyən həllinin axtarılmasına həmin tənlik üçün
qarışıq məsələ deyilir.
Tutaq ki, uzunluğu sonsuz olan simə baxılır. Belə simin hər hansı sonlu
hissəsinin hərəkətinə “uclarının” təsiri ola bilməz.
Simin uzunluğu çox böyük olduqda daxili nöqtələrin hərəkətinə üc nöqtələrinin
təsiri çox kiçik olur, bunu isə nəzərə almamaq olar. Buna görə də sonsuz simin
eninə sərbəst rəqslərinin (1) tənliyini həll edərkən heç bir sərhəd şərti qoyulmur,
ancaq (2) və (3) başlanğıc şərtləri qoyulur. Lakin bu halda, (2) və (3) şərtlərində
iştirak edən f (x) və F(x) funksiyaları bütün ədəd oxunda təyin olunur.
Sonsuz simin sərbəst rəqs tənliyi üçün söylədiyimiz şəkildə qoyulmuş Koşi
məsələsinin müəyyən şərtlər daxilində yeganə həlli vardır. Məsələn, f (x)
funksiyası iki dəfə diferensiallanan və F(x) funksiyası diferensiallanan olduqda
(1) tənliyinin (2) və (3) başlanğıc şərtlərini ödəyən yeganə həlli vardır. Bu həlli
Dalamber üsulu ilə tapmaq olar.
5. Sonlu simin sərbəst rəqs tənliyinin Furye üsulu ilə həlli.
Tutaq ki, sonlu simin uc nöqtələri Ox oxunun x = O və x = l nöqtələrinə
bərkidilmişdir. Bu simin
δ2 Uδ t2 =a2 δ2 U
δ x2 (1)
U
0 l x
sərbəst rəqs tənliyinin
U t=0=f ( x ) , (2)
δUδt t=0
=F (x) (3)
başlanğıc və
U (0 , t )=U ( l , t )=0 (4)
sərhəd şərtlərini ödəyən həllini tapaq. Qoyulmuş qarışıq məsələ burada Furye
üsulu(və ya dəyişənlərə ayırma üsulu) ilə həll etmək üçün bu üsuldan geniş
istifadə olunur.
Bu üsulun mahiyyəti ondan ibarətdir ki, (1) tənliyinin axtarılan (eyniliklə sıfra
bərabər olmayan) U(x,t) həlli biri ancaq x-dən, digəri isə ancaq t-dən asılı olan
T(t) və X(x) şəklində iki funksiyanın hasili şəklində axtarılır:
U (x , t )=X (x)T ( t). (5)
Bu qiyməti (1) tənliyində yerinə yazdıqda
X ( x )T ꞌꞌ (t )=a2 X ꞌꞌ ( x )T (t)
və ya
X ꞌꞌ ( x )X ( x )
=T ꞌꞌ (t )
a2 T (t) (6)
bərabərliyi alınır. (6) bərabəriyinin sol tərəfi t-dən, sağ tərəfi isə x-dən asılı dey-
ildir. Bu o zaman olar ki, həmin bərabərliyinin hər iki tərəfi nə x-dən, nə də
t-dən asılı olmasın. Onda,
X ꞌꞌ ( x )X ( x )
= T ꞌꞌ (t )a2 T (t)
=−μ (7)
olar ( μ hər hansı sabit ədəddir). (7) bərabərliklərindən iki dənə adi diferensial
tənlik alınır:
X ꞌꞌ ( x )+μ X (x )=0 , (8)
T ꞌꞌ ( t )+μ a2 T (t )=0. (9)
(1) tənliyinin axtarılan (5) həlli t-nın istənilən qiymətində (4) sərhəd şərtlərini
ödəməlidir:
X (0 )T ( t )=0 ,
X (l )T ( t )=0.
Bu bərabərliklərin ödənilməsi üçün ya istənilən t üçün T (t)=0 olmalı, ya da
X (0 )=X ( l )=0 (10)
olmalıdır. T (t)≡0 olduqda (5) həlli eyniliklə sıfra bərabər olar ki, belə həlli də biz
axtarmırıq. Beləliklə, ikitərtibli (8) xətti tənliyinin (10) sərhəd şərtlərini ödəyən
həllini tapmaq lazımdır.
Eyniliklə sıfra bərabər olan X ( x)≡ 0 funksiyası məsələsinin həllidir. Lakin bizi
məsələnin sıfır olmayan həlli maraqlandırır. Beləliklə (8) tənliyi üçün [0 , l ]
parçasında Spektr məsələsi və ya Şturm-Liuvil problemi adlanan aşağıdakı
məsələni həll etmək lazımdır: μ-nun hansı qiymətlərində (8) tənliyinin (10)
sərhəd şərtlərini ödəyən sıfır olmayan həlli var?
Bu məsələnin həlli olan μ ədədlərinə Şturm-Liuvil məsələsinin məxsusi
ədədləri, tənliyin həmin ədədlərə uyğun olan həllərinə isə məsələnin məxsusi
funksiyaları deyilir.
Şturm-Liuvil məsələsinin μ-nun hansı qiymətlərində sıfır olmayan həlli
olduğunu müəyyən etmək üçün (8) tənliyinin
λ2+μ=0 (11)
xarakteristik tənliyinə baxaq.
1. Tutaq ki, μ=−α 2<0. Onda (11) tənliyinin kökləri λ1=+α və λ2=−α olar. Bu
halda (8) tənliyinin ümumi
X ( x )=C1eαx+C2 e−αx
şəklində yazılır. C1 və C2 (e−αl−eαl¿=0 alınar. e−αl−eαl≠ 0 olduğundan C2=0 və buna
görə də C1=C2=0 olar.
Deməli, μ=−α 2<0 olduqda məsələnin eyniliklə sıfra bərabər olmayan həlli yox-
dur.
2. Tutaq ki, μ=0. Onda (11) tənliyinin kökləri λ1=λ2=0 və (8) tənliyinin ümumi
həlli.
X ( x )=C1+C2 x
olar. Bu həllin (10) şərtlərini ödəməsindən, yenə də
X (0 )=C1=0 , X (l )=lC2=0 , C2=0
və ya X ( x)≡ 0 alınır.
Deməli, bu halda da məsələnin sıfır olmayan həlli yoxdur.
3. Tutaq ki, μ=α2>0. Bu halda (11) xarakteristik tənliyinin kökləri λ1=αi , λ2=−αi
və (8) tənliyinin ümumi həlli
X ( x )=C1cos αx+C2sin αx
olar. (10) şərtlərinə görə
X (0 )=C1=0 , X (l )=C2 sin αl=0
olmalıdır. Burada C2≠ 0 olması üçün
sin αl=0 , α l=nπ
bərabərlikləri ödənilməlidir. Deməli, (8) tənliyinin eyniliklə sıfır olmayan həlli
α−¿nın
α=αn=nπl(n=1,2 ,…) (12)
qiymətlərində alınır. (8) tənliyinin bə ədədlərə uyğun olan və (10) şərtlərini
ödəyən həlləri
X n ( x )=Ansin πnl
x , n1 ,2 ,… (13)
olar( burada An ixtiyari sabitdir). Buradan aydındır ki, μn=αn2 ¿( πn
l)
2
ədədləri (8) tən-
liyi üçün yuxarıda qoyulmuş Şturm-Liuvil məsələsinin məxsusi ədədləri, (13)
funksiyaları isə həmin ədədlərə uyğun məxsusi funksiyalardır.
μ=μn¿ (πnl)
2
qiymətlərində (9) tənliyi
T ꞌꞌ (t )+( πnl
α )2
·T (t )=0
şəklində yazılar. Onun ümumi həlli
T n (t )=Bn cos nπαl
· t+Cn sin nπαl
· t (14)
olar. (Bn və Cn ixtiyari sabitlərdir).
(13) və (14) qiymətlərini (5) bərabərliyində yazmaqla, (1) tənliyinin (4) sərhəd
şərtlərini ödəyən
Un ( x , t )=(An Bncos nπαl
·t+An Cnsin nπαl
· t)sin nπl
x
və ya
U n ( x , t )=(an cos nπαl
·t+bn sin nπαl
· t) sin nπl
x (15)
xüsusi həlləri alınır (an=An Bn , bn=An Cn¿ . (1) tənliyi xətti bircinsli olduğundan onun
(4) sərhəd şərtlərini ödəyən emumi həlli
U ( x , t )=∑n=1
∞
U n ( x ,t )=¿¿
¿∑n=1
∞
(an cos nπαl
·t+bn sin nπαl
· t)sin nπl
x (16)
kimi yazılır. Bu həllə daxil olan an və bn əmsallarını (2) və (3) başlanğıc şərtlərinə
əsasən tapmaq olar.
Doğrudan da, (2) və (3) şərtlərinə əsasən alınan
U t=0=f ( x )=∑n=1
∞
an sin nπl
x ,
δUδt t=0
=F ( x )=∑n=1
∞ nπαl
bn sin nπl
x
bərabərlikləri göstərir ki, an və nπαl
bn kəmiyyətləri uyğun olaraq f (x) və F(x)
funksiyalarının (O, l ) intervalında sinuslar üzrə Furye sırasına ayrılışının əmsal-
larıdır. Bu əmsallar.
an=2l∫0
l
f ( x )sin nπxl
dx ,
bn=2
nπa∫0l
F ( x ) sin nπxl
dx
düsturları ilə təyin olunur.
Əmsallar üçün tapılmış bu qiymətləri (16) sırasında yerinə yazdıqda qoyulmuş
məsələnin tam həlli alınır.
Qeyd edək ki, yuxarıda aparılan əməllərin doğru olması üçün f (x) və F(x)
funksiyaları müəyyən şərtləri ödəməlidir. Burada həmin şərtlərin ödənildiyi fərz
φn ( p ) çoxhədlisi (1) tənliyinin xarakteristik çoxhədlisidir. Qn−1 (p ) isə p-yə
nəzərən (n – 1) dərəcəli cəbri çoxhədlidr.
(4) bərabərliyindən
Y (p )=Qn−1 ( p )+F ( p)
φn ( p ) (5)
münasibəti alınır. Beləliklə, axtarılan y(t) həllinin Laplas çevirməsi tapılmış olur.
Surəti məlum olan funksiyanın (orijinalının) özünü isə tərs Laplas çevirməsi
vasitəsilə tapmaq olar.
(2) başlanğıc şərtləri
y (0 )= y ꞌ (0 )=…= yn−1 (0 )=0
kimi olduqda Qn−1 (p ) olar və (5) bərabərliyi
Y (p )= F( p)φn ( p ) (6)
kimi sadə şəkildə yazılır.
Misal 1. y ꞌꞌ−3 y ꞌ+2 y=e3t tənliyinin
y (0 )= y ꞌ (0 )=0
Başlanğıc şərtini ğdəyən həllini tapmalı.
φ2 ( p )=p2−3 p+2
və
F ( p )=Λ [e3 t ]= 1p−3
olduğundan (6) bərabərliyinə görə.
Y ( p )= 1( p2−3 p+2)( p−3)
= 1( p−1)(p−2)( p−3)
(7)
olar. Buradan
y ( t )=12[et−2 e2t+e3 t ]
alınır.
Misal 2. y ꞌꞌ+4 y=t tənliyinin y (0 )= y ꞌ (0 )=0 başlanğıc şərtlərini ğdəyən həllini
tapmalı.
φ2 ( p )=p2+4 və Λ [ t ]= 1p2 olduğundan (6) bərabərliyi
Y (p )= 1p2( p2+4)
kimi yazılır. Bu ifadəni sadə kəsrlərə ayıraq:
Y (p )=14 ( 1
p2−1
p2+4 ) .
Buradan Λ [ t ]= 1p2 və Λ [sin 2t ]= 2
p2+4 bərabərliklərinə əsasən
y ( t )=14
t−18
sin 2t
alınır.
3. Diferensial tənliklər sistemlərinin həlli.
Adi diferensial tənlikləi həll etmək üçün yuxarıda tətbiq olunan operasiya üsulu
adi diferensial tənliklər sisteminin həll etmək üçün də yarayır. Bu zaman
yuxarıda aparılan mühakimə, demək olar ki, təkrar olunur. Bunu bir misal
üzərində izah edək.
x ꞌ− y=e t
y ꞌ−4 x=2 e t (1)
Tənliklər sisteminin x(0) = 0, y(0) = 0 başlanğıc şərtlərini ödəyən x = x(t) və
y = y(t) həllini tapmalı. X(p) = 𝛬[ x (t )] v ə Y(p) = 𝛬[ y (t) ] qəbul edərək, (1) tənliklərinin hər birinin hər iki tərəfinin Laplas çevirməsinin hesablasaq , X(p) və
Y(p)surətinə nəzərən
pX (p )−Y (p )= 1
p−1
pY (p )−4 X (p )= 2p−1
cəbri tənliklər sistemi alınar. Buradan həmin rətlər tapılır:
X ( p )= 1( p−1)(p−2)
, Y (p )= 2( p−1)( p−2) .
Bu ifadələri
X ( p )= 1p−2
− 1p−1 və Y (p )= 2
p−2− 2
p−1
kimi yazdıqda
x (t )=e2 t−e t , y ( t )=2e2 t−2e t
olduğu aydın olur.
Laplas çevirməsi cədvəli.
Budara praktiki məsələlərin həllində çox işlədilən bir sıra elementar
funksiyaların Laplas çevirmələri cədvəli verilir.
Mövzu 40
Təsadüfi hadisələr. Ehtimalın klassik tərifi. Ehtimalların
toplanması və vurulması qaydaları.
1. Təsadufi hadisələr.
2. Ehtimalın klassik tərifi.
3. Ehtimalnan bağlı məsələlərdə kombinatorikanın
elementlərindən istifdə.
4. Ehtimalların toplanması və vurulması qaydaları.
1. Təsadufi hadisələr.
Bizi əhatə edən gerçəkliyin dərk edilməsi sınaqlar və müşaidələr nəticəsində
baş verir. Ehtimal nəzəriyyəsinin əsas anlayışlarından biri sınaq anlayışıdır.
Sınaq dedikdə nəticəsi əvvəlcədən məlum olmayan təcrübə və ya müşahidə başa
düşülür.
Misal 1. Tutaq ki, metal pulu bir təfə atırıq. Bu zaman gərb və ya pul üzü düşə
bilər. Hansı üzün yuxarı düşəcəyini, yəni bu sınağın nəticəsini əvvəlcədən demək
olmaz.
Tərif 1. Təcrübənin hər bir nəticəsi elementar hadisə adlanır.
Tərif 2. Nəticəsi əvvəlcədən proqnozlaşdırıla bilinməyən hadisəyə təsadüfi
hadisə deyilir.
Misal 2. Qabda müxtəlif rəngli kürəciklər vardır. Qabdan kürəciyin çıxarılması
sınaqdır. Çıxarılmış kürəciyin hər hansı rəngdə olması isə hadisədiir.
Tərif 3. Təcrübə nəticəsində hükmən baş verən hadisəyə yəqin hadisə deyilir.
Misal 3. Bir cüt zəri bir dəfə atdıqda düşən xallar cəminin 12-dən çox
olmaması yəqin hadisədir.
Tərif 4. Təcrübə nəticəsində baş verməyəcəyi əvvəlcədən məlum olan hadisəyə
bu təcrübədən mümkün olmayan hadisə deyilir.
Misal 4. İçərisində yalnız qara rəngli kürəciklər olan qutudan ağ rəngli
kürəciyin çıxarılması hadisəsi mümkün olmayan hadisədir.
Ehtimal nəzəriyyəsi məhz təsadüfi hadisələrin qanuna uyğunluqlarını öyrənən
elmdir.
Tərif 5. Əgər A1, A2, ..., An hadisələrindən hər hansı ikisinin eyni zamanda baş
verməsi mümkün deyilsə, belə hadisələrə uyuşmayan hadisələr deyilir.
Xüsusi halda, bir sınaq zamanı iki hadisədən biri baş verməsi o birinin baş
verməsini inkar etmirsə belə hadisələrə uyuşan hadisələr deyilir, əgər inkar
edirsə, onda belə hadisələrə uyuşmayan hadisələr deyilir.
Misal 5. Metal pulu bir dəfə atırıq. Gərb üzünün hadisəsi pul üzünün düşməsi
hadisəsini inkar edir və deməli, bu hadisələr uyuşmayandır.
Misal 6. Zəri atdıqda “3” üzünün düşməsi və 6 ədədinin bölənlərinin düşməsi
hadisələri uyuşandır, çünkü 3 həm də 6-nın bölənidir.
Tərif 6. Əgər A1, A2, ..., An hadisələr çoxluğu cüt-cüt uyuşmayandırsa və
onlardan birinin və yalnız birinin baş verməsi yəqin hadisədirsə bu çoxluq tam
qrup adlanır.
Misal 7. Bir zəri bir dəfə atdıqda 1-dən 6-ya qədər olan xallardan biri düşməsi
yəqin hadisədir. Odur ki, bu hadisələr tam qrup təşkil edir.
Xüsusi halda, əgər sınaq nəticəsində iki hadisədən yalnız biri hökmən baş
verərsə, onda bu hadisələrə qarşılıqlı əks hadisələr deyilir. A hadisəsinin əksi A
ilə işarə olunur.
2. Ehtimalın klassik tərifi.
Tutaq ki, A hadisəsi nir dınağın nəticəsidir və A1, A2, ..., An eyniimkanlı
elementar hadisələrin tam qrupudur.
Tərif. A hadisəsi üçün əlverişli olan hallar sayının bütün eyniimkanlı hallar
nisbətinə həmin hadisənin ehtimalı deyilir.
Beləliklə, n sayda eyniimkanlı hallar olan təcrübədə A hadisəsi üçün m sayda
əlverişli hal varsa, bu hadisənin ehtimalı
P(A) = mn .
düsturu ilə hesablamır.
1. Mümkün olmayan hadisənin ehtimalı sıfra bərabərdir. Doğrudan da bu halda
sınaqlardan heç biri hadisəyə uyğun gəlmir, yəni m = 0 olur. Onda
P(A) = mn=0
n=0.
2. Yəqin hadisənin ehtimalı vahidə bərabərdir. Belə ki, yəqin hadisələrdə
sınaqların hamısı hadisəyə uyğun gəlir, yəni m = n olur. Onda
P(A) = mn=n
n=1.
Hər hansı A hadisəsi üçün əlverişli halların sayı mümkün halların sayından şox
olmadığından, yəni 0 ≤ m≤ n olduğundan, ehtimalın klaaik tərifindən və yuxarıdakı
mehakimələrdən alınır ki,
0 ≤ P (A )≤ 1 .
3. Ehtimalnan bağlı məsələlərdə
kombinatorikanın elementlərindən istifdə.
Hadisələrin ehtimalını hesablamaq üçün çoxlu sayda sınaqlar aparmaq lazım
gəlir. Sonlu sınaqların sayını hesablamaq üçün sonlu çoxluqların kombinatorika
elementlərindən istifadə edilir.
Fərz edək ki, n sayda detaldan m sayda detal standarta uyğundur. İxtiyari
götürülmüş k sayda detalın içərisində heç olmasa birinin standart detal olması
ehtimalı tapmaq tələb olunur. n detalın içərisindən k sayda detalı Cnk sayda üsulla
çıxarmaq olar. Deməli, mümkün halların sayı Cnk olur. Standart detalların sayı m,
qeyri-standart detalların sayı isə n – m olduğu üçün hadisəyə uyğun gələn
sinaqların sayını tapmaq üçün m standart detal içərisindən bir ədəd detal götürmə
üsulu ilə (Cm1 ), n – m sayda qeyri-standart detalın eçərisindən k – 1 sayda detalın
götürmə üsulunu (Cn−mk−1 ) bir-birinə vurmaq lazımdır. Onda
P(A) =Cm
1 Cn−mk−1
Cnk
olar.
Kombinatorikanın aşağıdakı düsturlarından ehtimalın hesablanmasında istifadə
olunur:
Cnk= n!
k ! (n−k ) !; Cn
k=An
k
P k ;
Ank= n!
( n−k )!=n (n−1 ) (n−2 )… (n−k+1 ) ;
Pk=1 · 2· 3 · …·k=k ! (k faktorial) ;
Cnk=Cn
n−k ;Cn0=Cn
n=1 ;C n1=n .
Burada Cnk−n elementdən k sayda kombinezon,
Ank−n elementdən k sayda aranjeman,
Pk−k elementli permutasiya işarələridir.
4. Ehtimalların toplanması və vurulması qaydaları.
A və B hadisələrindən heç olmasa birinin baş vermədi hadisəsinə bu
hadisələrin cəmi deyilir və A + B kimi işarə edilir.
Teorem 1. Uyuşmayan iki hadisənin cəminin ehtimalı onların ehtimalları
cəminə bərabərdir:
P(A + B) = P(A) + P(B)
İsbatı. Sınaqların ümumi sayını n, A hadisəsinə uyğun gələn sınaqların sayını
m1, B hadisəsinə uyğun gələn sönaqların sayını isə m2 ilə işarə etsək və
m = m1 + m2 olduğunu nəzərə alsaq alarıq:
P(A + B) =m1+m2
n=
m1
n+
m2
n=¿ P(A) + P(B).
Nəticə. A1, A2, ..., An hadisələri uyuşmayan hadisələrdirsə, onda onların cəminin
ehtimalı bu hadisələrin ehtimallarının cəminə bərabərdir, yəni
Ehtimalların hesablanması üçün zəruri olan düsturlar.
1. Tam ehtimal.
2. Beyes düsturu.
3. Bernulli dürsturu.
4. Laplasın lokal və inteqral teoremləri.
1. Tam ehtimal.
Fərz edək ki, A hadisəsi tam hadisələr qrupu təşkil edən uyuşmayan B1, B2,...Bn
hadisələrindən birinin baş verməsi şərtində meydana çıxa bilər. Bu hadisələrin
ehtimalları P(B1), P(B2),..., P(Bn) və A hadisəsinin uyğun şərti ehtimalları - PB 1(A), PB 2(A),...PB n(A), məlum olduqda A hadisəsinin ehtimalını tapmaq tələb olunur. Bu
ehtimalı tapmaq üçün aşağıdakı teoremdən istifadə edilir.
Teorem 1. Tam qrup təşkil edən uyuşmayan B1, B2,...Bn hadisələrindən ancaq
birinin meydana çıxması ilə baş verən A hadisəsinin ehtimalı bu hadisələrdən hər
birinin ehtimalı ilə A hadisəsinin uyğun şərti ehtimalları hasillərinin cəminə
Çoxluq anlayışı riyaziyyatın ən mühüm anlayışlarından sayılır. Bildiyimiz kimi riyaziyyatın hər bölməsində əsas və onlardan irəli gələn anlayışları qəbul edirlər. Bu anlayış (çoxluq anlayışı) riyaziyatda ilkin anlayışlardan biri sayılır. Qeyd edək ki, əgər anlayışa riyazi dildə konkret və dəqiq tərif verilmirsə həmin anlayışlara ilkin anlayış deyilir.
Məhz bu səbəbə görə çoxluq anlayışında ilkin anlayış sayılır. Baxmayaraq ki,
çoxluq üçün dəqiq tərif mövcud deyil bu anlayışı müxtəlif misallar üzərində
geniş tətbiq etmək mümkündür. Məsələn: çoxluq deyendə biz müəyyən növlü
əşyaların toplusunu və ya tələbələrin yığıncağını nəzərdə tuta bilərik.
Adi həyatda hansı əşyaların toplusundan və ya çoxluğundan danışarkən nəzərdə
tutulur ki, bu topluya ən azı 2,3 və bundan çox əşya daxildir. Riyaziyyatda bu
yanaşmadan fərqli olaraq elə çoxluqlar mövcüddur ki, onlar heç bir elementi,
əşyanı daxilinə almaz amma buna baxmayaraq bu topluya biz yenədə riyazi
mənada çoxluq deyə bilərik. Sadəcə bu növ çoxluğlara xüsusi olaraq boş
çoxluqlar adı qoyulur. Gördüyünüz kimi riyaziyyatda çoxluqlar öz daxilinə:
a) Sonsuz sayda əşyalar ala bilər.
b) Sonlu sayda əşyalar daxil edə bilərlər.
c) Yeganə elementdən tərtib olunmuş ola bilər.
d) Çoxluq heç bir elementi (əşyanı) daxilinə almayır.
Misal 1.
2x – 10 = 16
2x = 26
x = 13
Gördüyümüz kimi bu tənliyin köklər çoxluğu 13 rəqəmindən ibarətdir. Yeganə
elementli çoxluq.
Misal 2.
x2 – 16 = 0
x2 = 16
x = 4
Bu tənliyin həllər çoxluğu gördüyümüz kimi [± ;4 ] 2 elementli çoxluqdur.
Misal 3.
cos x = 1
x = 2πk, k∈ z
Bu tənliyin y = cos x triqonometrik funksiyasının dövrü olmağına görə (T = 2π)
sonsuz sayda həlləri mövcuddur. Deməli, bu tənliyin köklər çoxluğu sonsuz sayda elementlərdən ibarətdir.
Misal 4.
x2 = 25 = 0
x2 = -25
x ≠ ±5
Bu tənliyin xüsusiyyətinə görə kvadrat olan ifadənin qiyməti mənfi ola bilməz. Deməli, bu tənliyin həqiqi kökləri mövcud deyil. Ona görə bir çoxluq olaraq bu tənliyin həllər çoxluğu [0 ] çoxluğudur.
Misal 5.
sin x = 2 x2 – 3x + 5 = 0
D = b2 – 4ac = 32 – 4 · 1 · 5 = 9
4x = -16
4x = -42
x = -4
Çünki bu tənlik üstlü funksiya ilə bağlıdır. Tənliklərin kökləri bizi böş çoxluğa gətirir.
Qeyd edək ki, çoxluqlar müxtəlif təbiyətdi əşyalardan ibarət olur. Riyaziyyatda çoxluqlara daxil olan əşyalara elementlər deyilir. Çoxluqların özləri böyük latın hərfləri ilə işarə olunur.
A=[a , b , c , d ]
Gördüyümüz kimi A elementi 4 çoxluqdan ibarətdir. İxtiyari elementlər verilmiş çoxluqlara məxsus olub-olmadığını göstərmək üçün xüsusi işarədən
istifadə edirik - .
a∈ A ,b∈ A ,b∈ A ,
0∈n – doğru deyil.
1.5 ∈ z – yalnışdır.
-10∈z – doğrudur.
Çoxluqlar onlara daxil olan elementlərini təbiətcə müxtəlif olmağına baxmayaraq 2 böyük sinifə ayrılır: 1 sinif – sonsuz çoxluqlar, 2 sinif – sonlu çoxluqlar.
Əgər verilmiş çoxluqların bütün elementlərini sadalayaraq göstərmək mümkün olarsa bu növ çoxluqlara sonlu çoxluqlar deyilir. Əks halda həmin çoxluq sonsuz elementli çoxluq sayılır.
N – natural ədədlər çoxluğu.
Z – tam ədədlər çoxluğu.
R – həqiqi ədədlər çoxluğu.
C – kompleks ədədlər çoxluğu.
Re – irrasional çoxluqları. Hər biri sonsuz çoxlluqlar sayılır. Bu ümumi çoxluqlardan başqa onlar tərtib olunmuş əbədi parçalardan biri həm sonlu, həm də sonsuz alt çoxluqları tərtib edə bilərik. Adətən riyaziyyatda bərabərsizlikləri həll edərkən onların həllər çoxluqları ədədi parça şəklində göstərilir.
Misal 6.
2x – 12 0
2x 12
x 6 0 6
x [6 ;∞¿
Həmin aralığa aşağıdan məhdudlaşdırılmış yuxarıdan açıq ədədi parça deyilir və ya yarım interval deyilir.
Misal 7.
3 x>9−2 x<16 ¿> x>3
x>−8 -8 0 3
həndəsi təsvirinə görə bu bərabərsizliyi bizi sonsuz çoxluqa gətirir.
2. Çoxluqların verilmə üsulları.
Çoxluqların sonlu və ya sonsuz olmasından asılı olaraq onların verilməsində aşağıdakı göstərilən üsullardan istifadə edə bilərik.
Qeyd edək ki, çoxluqların verilməsində əsas üsullar kimi 2 üsul qəbul olunub.
1-ci üsul: çoxluqların elementlərini sadalama yolu ilə müəyyən edilməsi üsulu, bu üsulun tətbiqi sadəcə ondan ibarətdir ki, çoxluğa elementlər sadəcə olaraq aralarında vergül olmaqla böyük mötərizə daxilində yazılmalıdır. Adətən bu üsuldan verilən çoxluqlar sonlu sayda olanda istifadə olunur. Amma onuda qeyd edək ki, bəzən sonlu çoxluqlar çox böuük sayda elementlərdən ibarətdir.
x∈ [−3 ;110 ]
Belə olan halda sadalanma üsulundan istifadə etmək heç də əlverişli deyil.
2-ci üsul: yuxarıda deyilənləri nəzərə alaraq elementlərinin sayı həddindən artıq və ya sonsuz çoxluqlar üçün xarakteristik xassə adlandırılan digər bir üsuldan istifadə edə bilərik. Öncə xarakteristik xassə anlayışlara konkret tərif qəbul edək.
Tərif. Tutaq ki, A çoxluğu verilmişdir və bu çoxluğun elementlərinin üzərinə ya tələb yaxud da bir xassə ρ=(x ) qoyulur.
Əgər bu tələb və ya xassə yalnız və yalnız A-çoxluqlarının elementlərinə şamil oluna bilsə, o zaman deyirlər ki ρ=(x ) xassəsi A-çoxluğunun xarakteristik xassəsidir.
Qeyd edək ki, bu üsul hər variantda çox əlverişli olduğuna görə bunlar bəzən tək sonsuz yox eyni zamanda sonlu çoxluqların verilməsində də istifadə olunur.
M=[ X∈ A ˄ X<10 ]
Bu çoxluq elə natural ədədlərdən tərtib olunur ki, onların biri ciddi kiçik olmalıdır.
D= [ X∈Z ˄ X<3 ]
Bu çoxluqa 3 ədədini qalıqsız bölünən bütün tam ədədlər daxildir. Müqayisə etsək bu çoxluqlar fərdi sinifə daxildir. (1-ci sonlu)(2-ci sonsuz) lakin buna baxmayaraq bu çoxluqların hər ikisi yuxarıda göstərilən xarakteriksiz üsulun köməkliyi ilə verilir.Beləki M-çoxluğunun xarakteristik xassəsi hər bir ədədi qalıqsız 3-bölməsinin tələbindən ibarətdir.
3. Çoxluqlar arasında münasibət.
Tərif 1. Tutaq ki, A-çoxluğu verilmişdir. B-çoxluğunun hər bir elementi eyni zamanda A-çoxluğuna daxil olduqda B-çoxluğuna A-nın alt çoxluğu deyilir.
B⊂ A
Misal 1. [ A , B , C , D ]
B1=[ A ,B , C ] B1⊂ A
B2=[C , D ,F ] B2⊂ A.B3=[ A ,C , E ,K ]
Alt çoxluğunun tərifindən elə nəticəyə gəlmək olar ki, hər bir çoxluq eyni zamanda da elə ozünün alt çoxluğu kimi göstərilə bilər.
Alt çoxluğu 2 növə bölünür:
1)Məxsusi,
2)Qeyri-məxsusi.
Verilmiş çoxluğun özü və boş çoxluq qeyri-məxsusi alt çoxluqları adlanır. Gördüyünüz kimi qeyri-məxsusi çoxluqların elementləri ya verilmiş çoxluöa bərabər olmalıdı və ya heç bir elementi daxilinə almamalıdır. Onuda qeyd edək ki, boş çoxluq ixtiyari çoxluğun qeyri-məxsusi alt çoxluğu kimi qəbul olunur.
Verilmiş çoxluğun elementlərindən düzəlmiş digər alt çoxluqlarına məxsusi alt çoxluğu deyilir. Məxsusi alt çoxluğunun elementlərinin sayı mənasına görə ilkin verilmiş geniş çoxluğun elementlərinin sayından az olmalı belə olması həmin alt çoxluğu qeyri-məxsusi sayılır.
A=[3,4,6,7,9 ] bu çoxluq üçün (3,4) (6,7,9) və bunun kimiləri A-nın məxsusi alt çoxluğu kimi göstərilə bilər. Həqiqətən bu alt çoxluğunun elementinin sayı A-çoxluğun elementindən çox azdır.
Tərif 2. A alt çoxluğu B alt çoxluğun şərtlərini ödəyən çoxluqlara bərabər çoxluqlar deyilir. A = B kimi işarə olunur.
Misal 2. A=[k , e , f , g ] , B= [e , f , k , g ] bu çoxluqlar həqiqətən də yuxarkı tərifə əsasən bərabər çoxluq deyə bilərik. Çünki hər iki çoxluğun elementlərinin sayı eynidir.
(N=4) və bundan əlavə olaraq A və B çoxluqları eyni elementlərindən tərtib olunmuşdur.
A və B çoxluqların fərqinə gəldikdə deyə bilərik ki onlara daxil olan elementlər yalnız düzülüşünə görə fərqlənir. Deməli 2-çoxluğun bərabər olmasının 2 şərti var:
1) Sayca eyni olmalıdır.
2) Eyni elementlərdən tərtib olunmalıdırlar, əgər çoxluqlar arasında bərabərlik münasibəti mövcüd olarsa qeyd etdiyimiz kimi həmin çoxluqlar elementlərin sayına görə və elementlərinə görə eyni olmalıdırlar. Lakin həmin elementlərinin düzülüşünə görə çoxluqlar fərqli ola bilər. Bu münasibətin aşağıda göstərilən 3 əsas xassəsi var:
1) Refleksivlik – A=A. Yəni hər bir çoxluğun qeyri-məxsusi alt çoxluğu olur.
2)Simmetrik – A=B olarsa B=A doğru olmalıdır.
3)Tranzitivlik. Əgər A=B və eyni zamanda B=C olarsa, o zaman bir nəticə olaraq A=C münasibəti də doğru olmalıdır.
Mövzu 46
Çoxluqlar üzərində aparılan əməllər. Onların Eyler-Venn
diaqramlar ilə göstərilməsi. Çoxluqların bərabər olması. Alt
çoxluqları növləri. Kartej.
1. Çoxluqların kəsişməsi.
2. Çoxluqların birləşməsi.
3. İki çoxluğun fərqi.
4. Alt çoxluğun tamamlayıcısı.
5. Eyler-Venn diaqramları.
6. Kartej anlayışı.
7. Çoxluğun siniflərə ayrılışı.
1. Çoxluqların kəsişməsi.
Bildiyimiz kimi ixtiyari riyazi nəzəriyyəsinin mahiyyəti ondan ibarətdir ki,
müəyyən təbiətli obyektlər toplusu öyrənmə predmeti kimi qəbul olunur və
həmin obyektlərin özəl xassələri və eyni zamanda obyektlər arası münasibətlərini
öyrənib təhlil etmək üçün müəyyən qayda və qanunlar qəbul olunur. Məsələn:
ədədlər nəzəriyyəsini öyrənmə predmeti kimi bir ixtiyari növlü ədədləri göstərə
bilərik. Həmin ədədləri və onların xassələrini təhlil etmək üçün bizə məlum olan
toplama, çıxma, vurma, bölmə kimi və bu qanunlarla bağlı kök alma kimi cəbri
əməllər qəbul olunur və həmin əməllər özlərinə görə xassələri məlum olunur.
Anoloji olaraq, baniləri alman alimləri olan Georq, Kantor, Rixard, Dedekind
olan çoxluqları nəzəriyyəsi üçün də bu obyektləri öyrənmək üçün onların
üzərində aparıla bilən əməlləri təyin olunur. Qeyd etməliyik ki, həmin əməllər adi
ədədlər üzərində aparılan cəbri əməllərdən fərqli olaraq məntiqi məzmunludur.
Həmin qanunları Corc Bull öz “Məntiqi Cəbr” adlı əsərində dəqiq və ətraflı əks
etdirmişdir.
Tərif 1. Tutaq ki, A və B boş olmayan çoxluqlar verilmişdir. Bu çoxluluqların
bütün ortaq olan elementlərindən düzəlmiş yeni çoxluğa A və B çoxluqlarının
kəsişməsi deyilir.
Tərifdən aydındır ki, həmin yeni çoxluğun hər bir elementi mütləq həm A
çoxluğuna, həm də B çoxluğuna daxil olmalıdır. A=[ A , B , C ] , B [B , C , F , K , L ]. Əgər
bizdən bu çoxluğun kəsişməsini tərtib etmək tələb olunarsa biz A BB ,C
çoxluğunu alarıq. İki çoxluq arasında kəsişmə münasibətini riyazi dildə aşağıdakı
kimi göstərə bilərik.
A B=X∨X∈ A ˄ X∈B
Misal . A-düzbucaqlı üçbucaqları, B-bərabəryanlı üçbucaqlar. Bu iki çoxluğun
kəsişməsinə daxil olan elementlər əlbəttə ki, üçbucaqlar olmalıdır. Lakin həmin
fiqurlar A=B çoxluqları xarakteristik xassələrinə görə eyni zamanda hər ikisənə
malik olmalıdır. Yəni kəsişməyə daxil olan üçbucaq həm düzbucaqlı həm də
bərabəryanlı olmalıdır. Nəticədə biz düzbucaqlı bərabəryanlı üçbucaqlar çoxluğu
alırıq.
A= Y B = Y= Y
Tərif 2. Kəsişmə əməli təqribi iki çoxluq üçün yox sonlu sayda boş olmayan
çoxluqlar üçün də şamil oluna bilər.
A=A1∩ A2∩ A3∩…∩ An=∪in Ai
İki çoxluğun kəsişməsi məntiqi əməl olduğuna görə o müəyyən xassələrə malik
olmalıdır. Həmin xassələrə çoxluqların kəsişməsinin əsas qanunları deyilir.
1) A B= B A - kommutativlik xassələri.
2) A ( B C) = (A B)∩ C – assosiativlik xassəsi.
3) Əgər B – alt çoxluğu A olarsa o zaman A B= B olmalıdır.
4) A A = A
5) A∩∅=∅
Dördüncü qanunun mahiyyəti ondan ibarətdir ki, çoxluqlar nəzəriyyəsində
qüvvət anlayışı yoxdur. Yəni ki, siz eyni çoxluğun istənilən sayda kəsişməsini
düzəltməklə o çoxluğun elementlərinin sayı artmayacaq.
2. Çoxluqların birləşməsi.
Tərif. Tutaq ki, boş olmayan A və B çoxluqları verilmişdir. A və B
çoxluqlarının heç olmasa birinə daxil olan bütün elementlərindən düzəlmiş yeni
çoxluğa A və B çoxluqlarının birləşməsi deyilir və A və B kimi işarə olunur.
Tərifdən aydındır ki, element mütləq verilən çoxluqların birinə daxil olmalıdır.
Misal. A=a , b , c ,d , f , k , s , p
B= b , e , f , k , s
İki çoxluğun birləşməsini oqaydaya əsasən aparırıq ki, əvvəlcə daha geniş olan
çoxluq yazılır və həmin çoxluğa 2-ci çoxluqdan fərqli elementlər əlavə olunur.
A∪B a ,b , c , d , e , f , k , s , p
A və B çoxluqlarının elementlərini müqayidə etdikdə görünür ki
n ( A )=7
n (B )=5
n ( A∪B )=9.
Görünür ki, A və B çoxluqları elementlərinin sayının cəmi yeni çoxluğun
elementlərinin sayından fərqlidir. Bu ona görə boş çoxluq deyil ki, verilmiş
çoxluqların ortaq elementləri var. Həmin elementlər birləşməyə bir dəfə
yazıldığına görə yeni çoxluğun elementlərinin sayı fərqli alınır. Qeyd edək ki,
əgər verilmiş çoxluqların ortaq elementləri yoxdursa, o zaman birləşməyə daxil
olan elementlərinin sayı verilmiş çoxluqların elementlərinin cəminə bərabər
olmalıdır.
Ümumiyyətlə çoxluqların birləşməsinə daxil olan elementlərinin sayını aşağıda
göstərilən qaydaların birinə əsasən hesablamaq mümkündür.
Qayda 1. Əgər çoxluqlar kəsişirsə.
I. A ∩ B≠∅=¿ n ( A∪B )=n ( A )+n (B )−n (AB ) .
Qayda 2. Əgər verilmiş çoxluqlar kəsişməyən çoxluqlar olarsa, o zaman
II. ∩ B ≠∅=¿n (A∪B )=n ( A+n (n ) ) .
Kəsişmədə olduğu kimi çoxluqların birləşməsi üçün də bir neçə əsas məntiqi
qəbul olunur.
Xassə 1. A∪B=A−¿ bu xassənin mahiyyəti ondan ibarətdir ki, çoxluqlar




















































































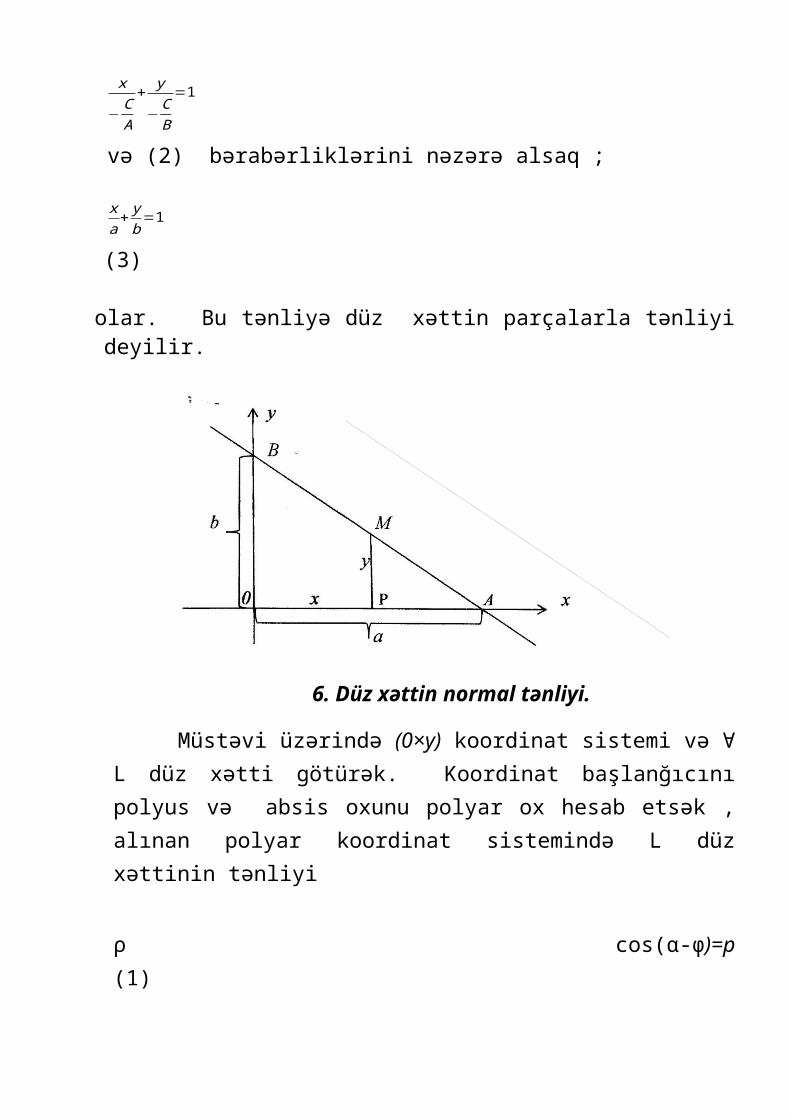






















































































































































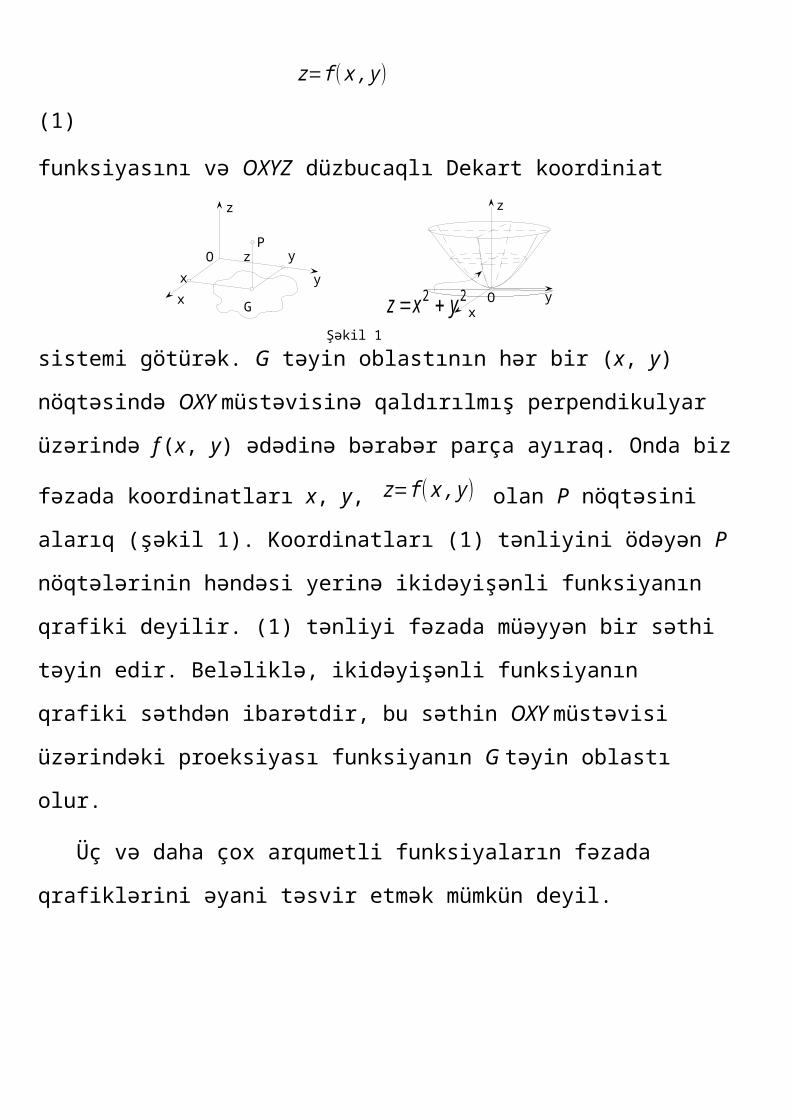





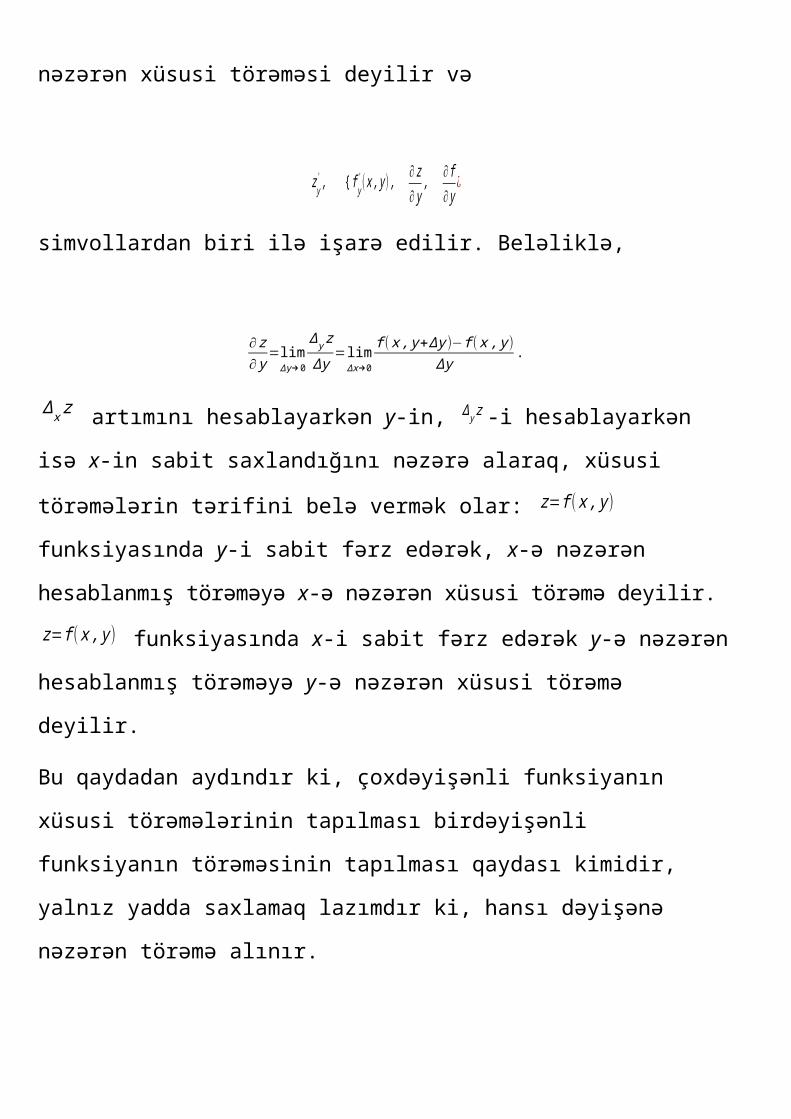
























































































































![[IJCT-V1I2P2] Author :Vahid Ghoreish](https://static.documents.pub/doc/80x56/577cc1761a28aba7119326b7/ijct-v1i2p2-author-vahid-ghoreish.jpg)















