140
APOLLO TRAININO GUIDANCE AND CONTROL SYSTEMS - BLO CK II s / c lO_ 15SEPTEMBER 1 9 67 FOR TRAINING PURPOSES ONLY O OI6 " l ' le 2_
| Date post: | 10-Apr-2018 |
| Category: |
Documents |
| Upload: | bob-andrepont |
| View: | 222 times |
| Download: | 0 times |
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 1/148
A P O L LO T R A IN IN O
GUIDANCE AND CONTROL
SYST EMS - BL O CK II
s /c lO_
15SEPTEMBER 1 9 67 FOR TRAINING PURPOSES ONLY
OOI6"l'le2_
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 2/148
APOLLOR AINING
GUIDANCE AND CON TRO L
SYS TEMS- BLOC K II
s /c _o_
15 SEP TEMBER1967 FO R T RA IN IN G P UR PO SES O N L Y
OG,S_ '_¢Q
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 3/148
QUES TIONS R ELATIVETO THE CON TENTS O F THIS
DOCUMENT SH OULD BE DIRECTEDT O:
D.P. B ENNETTA.R. PAYNEW.O. RU FFINA.H. SOHLER
NAA, SDDOWNEY, CALl FORNIAExten s ion 4325 ,6, or 7
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 4/148
TABLE OF CONTENTS
Se ction Pag e
I I NTRODUCTION .......... 1
II COMPUTER AND COUPUNG DATA UNITS ...... 9
HI OPTICAL AND INERTIA L S UBSYSTEMS . . . Z9
IV ATTITUDE CONTRO L SUBSYSTEMS . . 48
V ATTITUDE REFERENCE S UBSYSTEMS .... 70
VI NAVIGATION . 87
VII THRUST VECTOR CONTROL SUBSYSTEMS AND SIVB TAKEOVER 94
VIII ENTRY CONTRO L AND DISPLAY (EMS) . . . 1I0
IX POWER DISTRIBUTION, ABBREVIATIONS AND ACRONYMS . . . IZ6
i i
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 5/148
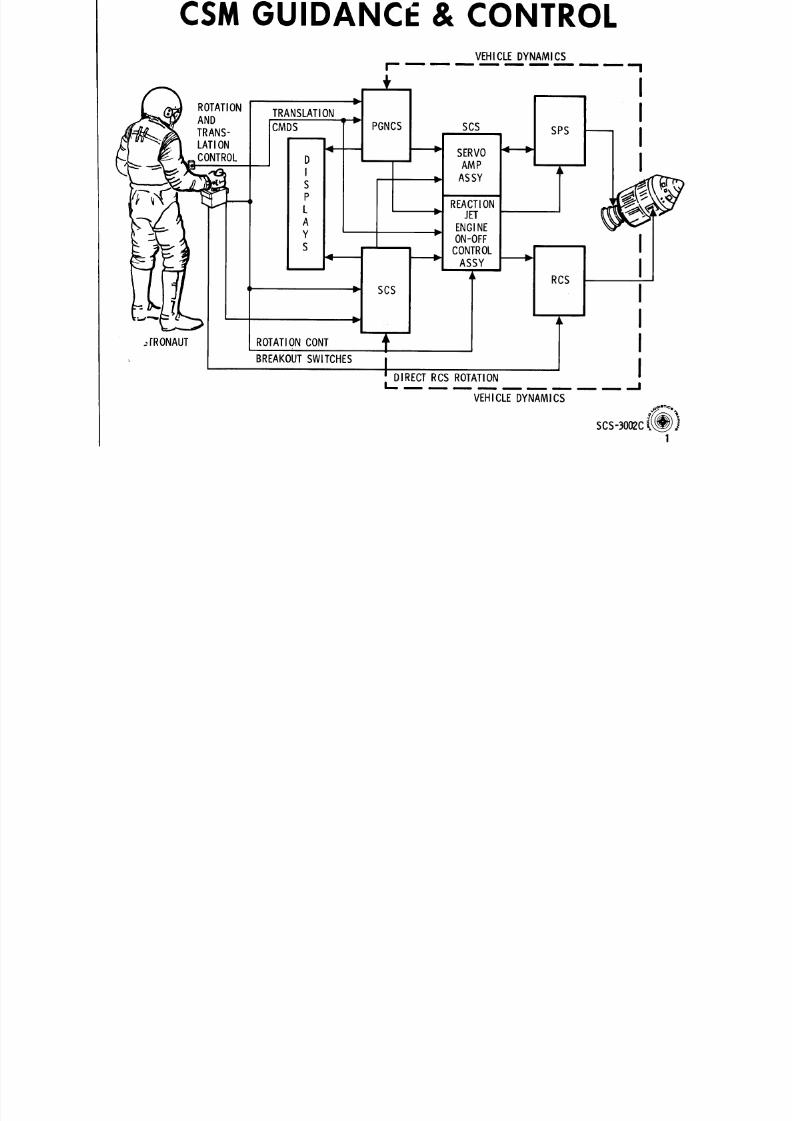
CSMGUIDANC, :. & CONTROLVEHICLEDYNAMICS
I'-......... "3
ROTA TION TRANSLATION [[
AND _ i PGNCS SCS SPS iiTRANS-
LATION SERV0
_ A_PASSY
L REACTIONA ENGINEY ON-OFF
I s _! CONTROL i
r ASSY
R C SSC S
_,rRONA UT BREAKou TRTATONCONTswI TCHESl T [- D IR ECT R CS R O TATIO NI_. ....... _,1
V EH ICL E D YN A MI CS
scs-_ oo_1
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 6/148
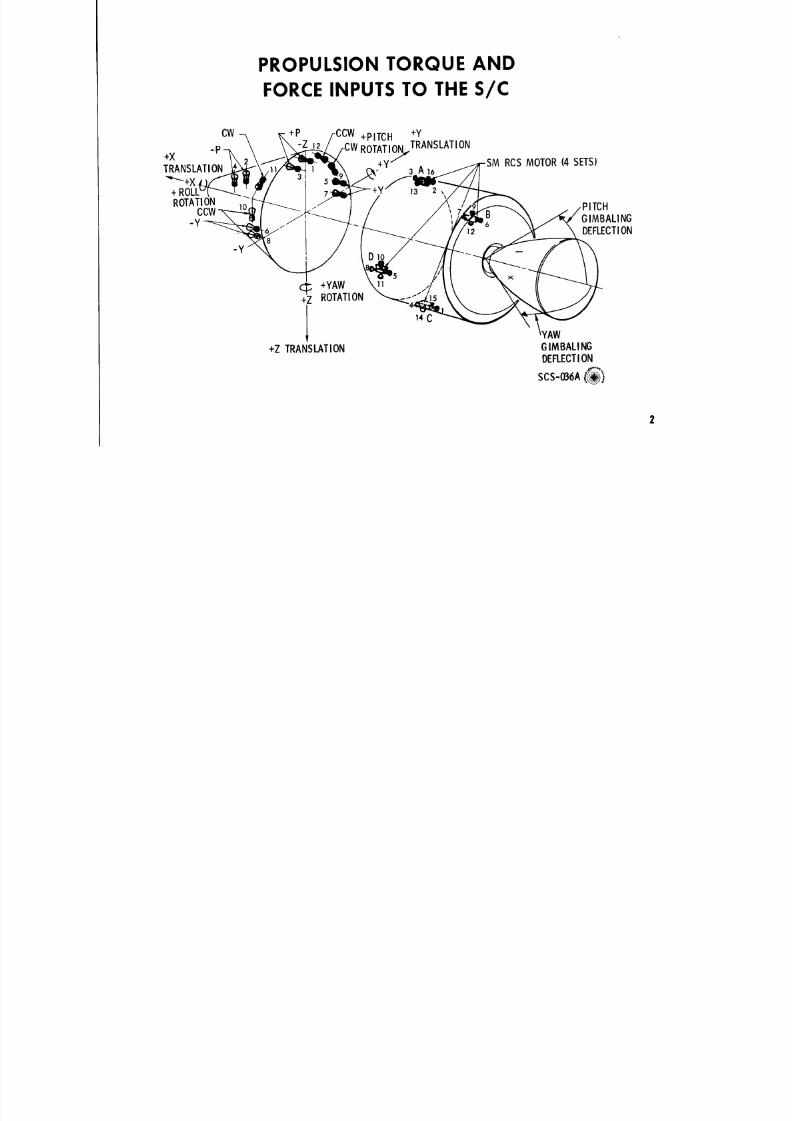
PROPULSION TORQUE ANDFORCE INPUTS TO THE S /C
CW +P +PITCH+Y
+X -P -Z 12 ROTAT IONv_,TRANSLATION+y/ RCSMOTOR( 4 SETS )
TRANSLATION 3 A 1631
+X+ 13 2 , ,ROTATION _- PITCH
MBALING- Y / 6_2 DEF LECTIN
-y
x
cT_ +YAW 11+Z ROT ATION
14C+Z TRANSLATION GIMBALING
DEFLECTON
s c s - o o , A
2
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 7/148
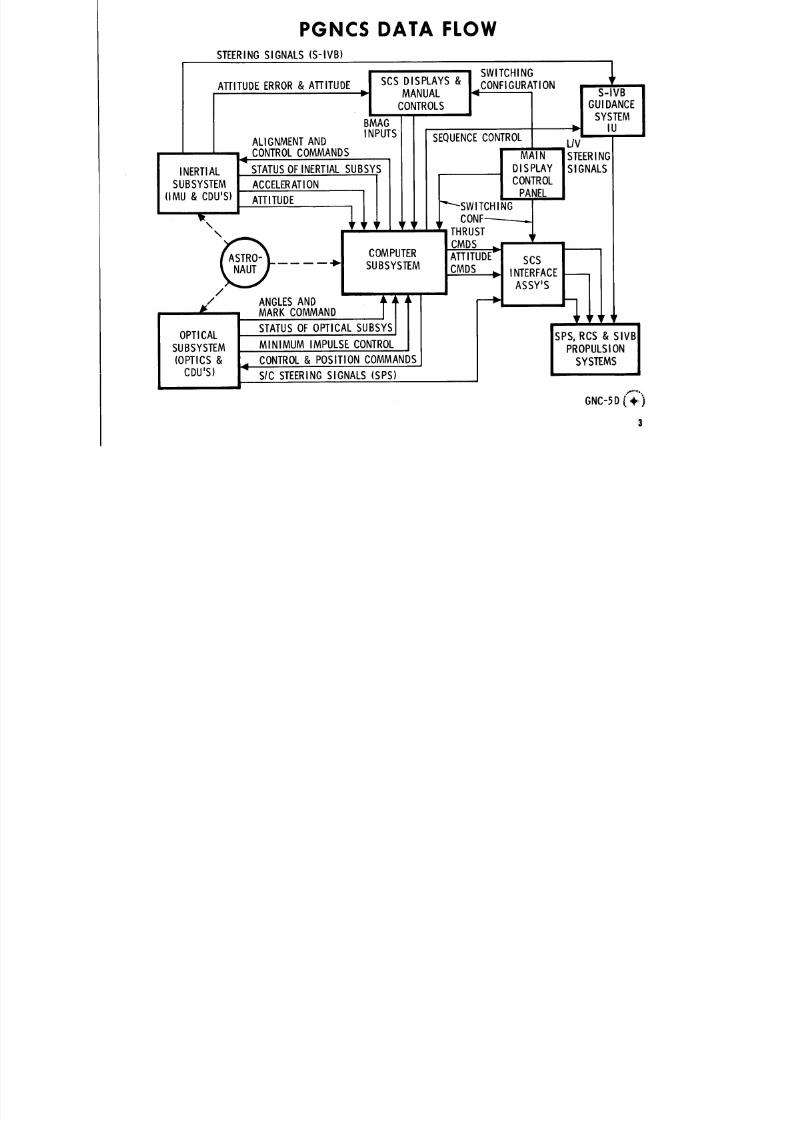
PGNCS DA TA FLOWSTEERING SIGNALS (S-IVB)
SWITCHIN G !1TTITUDEERROR& ATTITUDE _I SCSDLSP LAYS& I..,CONFIG URAT ION (:v m , , ,_,,u_,- mM l m .. ,- , . BI
m CONTROLS i , i GUIDANCEmB_AG II ' I .I YSTEM Ip . IU I
ALI GNMENTAND 'NuTs l l SEQUENCEC ONTROLILZV' im_ CONTROLCOMMANDS I I I M,a ,N STEERI NG
NERTIAL I STATU SOFINERTIALSUBSYSI I I I DISPLAY SIGNALSSUB SYSTEMI ACCELERATION IIII I I CONTRO L I
co u . ,Am.Oo PAN .CONF- -\ RUST
\y"_ I ICMDS_, T ___ I{A_ TP n- _ I COMPUTER IATTITUDE'ISCS _ i_'_I_AUT'_ .... "1 _ SUBSYST EM ICMDS .J INTERFACE I /
ANGLESND ++ + ---_ h I I /• , MARKOMMAND/ ÷÷++I STATUSOF OPTICALSUBSYS / , ,SPS ,RCS & SIVB
OPTICA L MINIMUMMPULSEONTROL I PROPU LS'O NUBSYSTE M
(OPT ICS& I_ CONTROL PO S ITIONCOMMANDS I SYS TEMS ICDU'S ) I SIC STE ERING IGNALS SP S ) I
IfT_o
GNC- 5D ( 4,' )
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 8/148
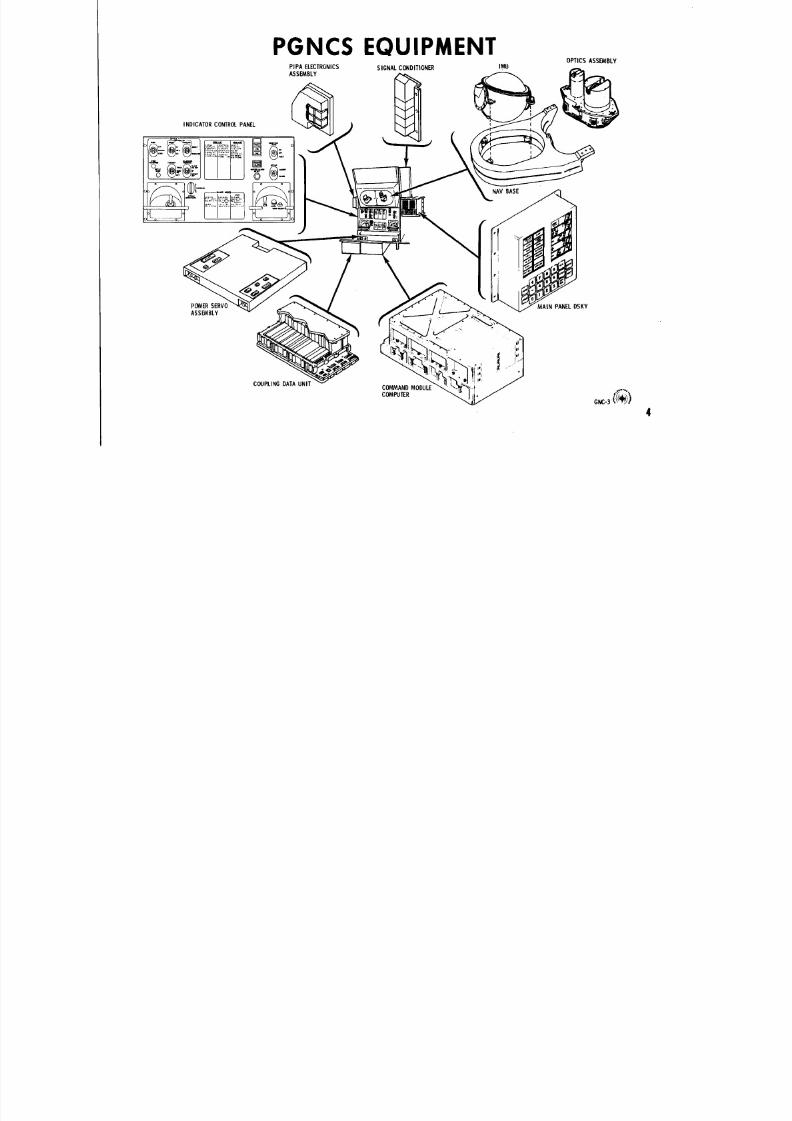
PGNCS EQUIPM ENTOPTICS ASSEMBLY
PIPAELECTRONICS SIGNALONDITIONER IMU
ASSEMBLY _INDICATORCONTROLANEL _'q_ l I
POWER NELSKYASSEM BLY
• )
COUPLINGDATAUNIT _"COMMANDMODULECOMPUTER _" "_'"
4
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 9/148
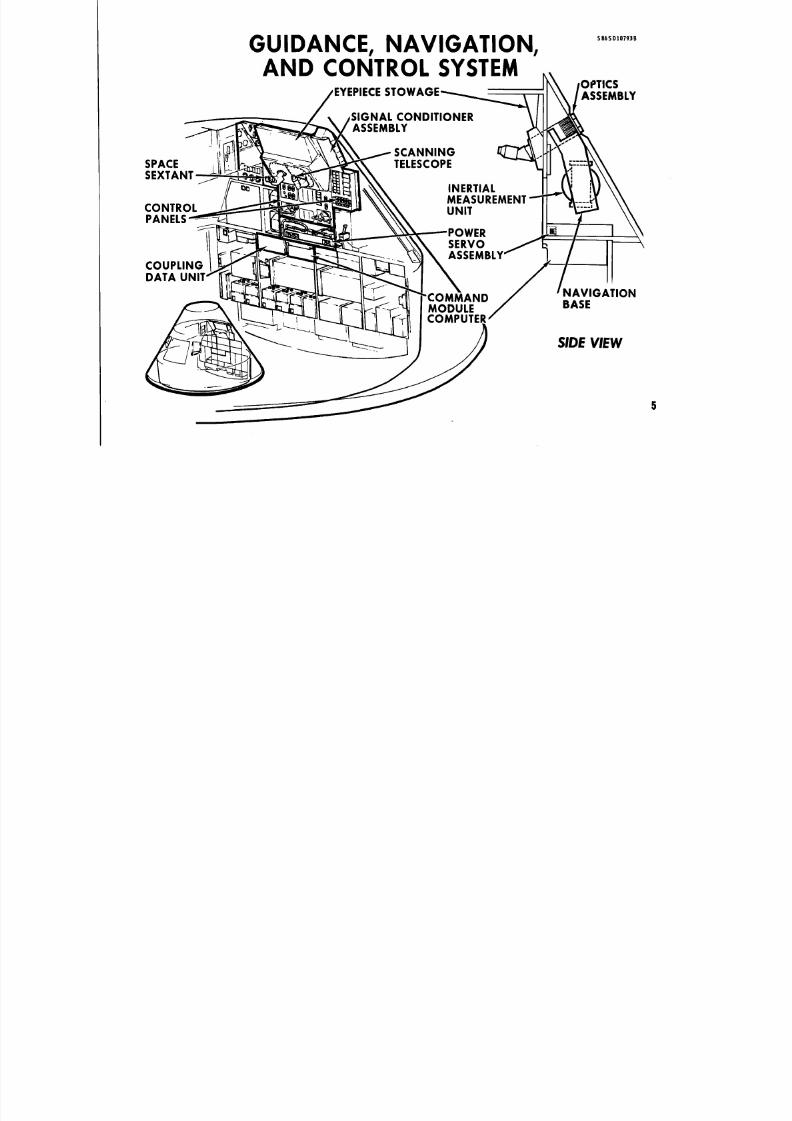
GUIDANCE NAVIGATION , s ,,_o, o,,,, ,AND COI_TROLSYSTEM
STOWA(_ r OPTICSASSEMBLY
_ __ SIGNAL CONDITIONERASSEMBLY
SPACE _11 _ SCANNINGELESC OP ESEXTANT
INERTIALMEASUR EMENT
CON TROL UNITPAN ELSI
)WERj SERVO
ASS EMBLYCOUPLINGDATA -4-
AND NAVIGATIONMODULE BASE
' SIDEVIEW
5
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 10/148
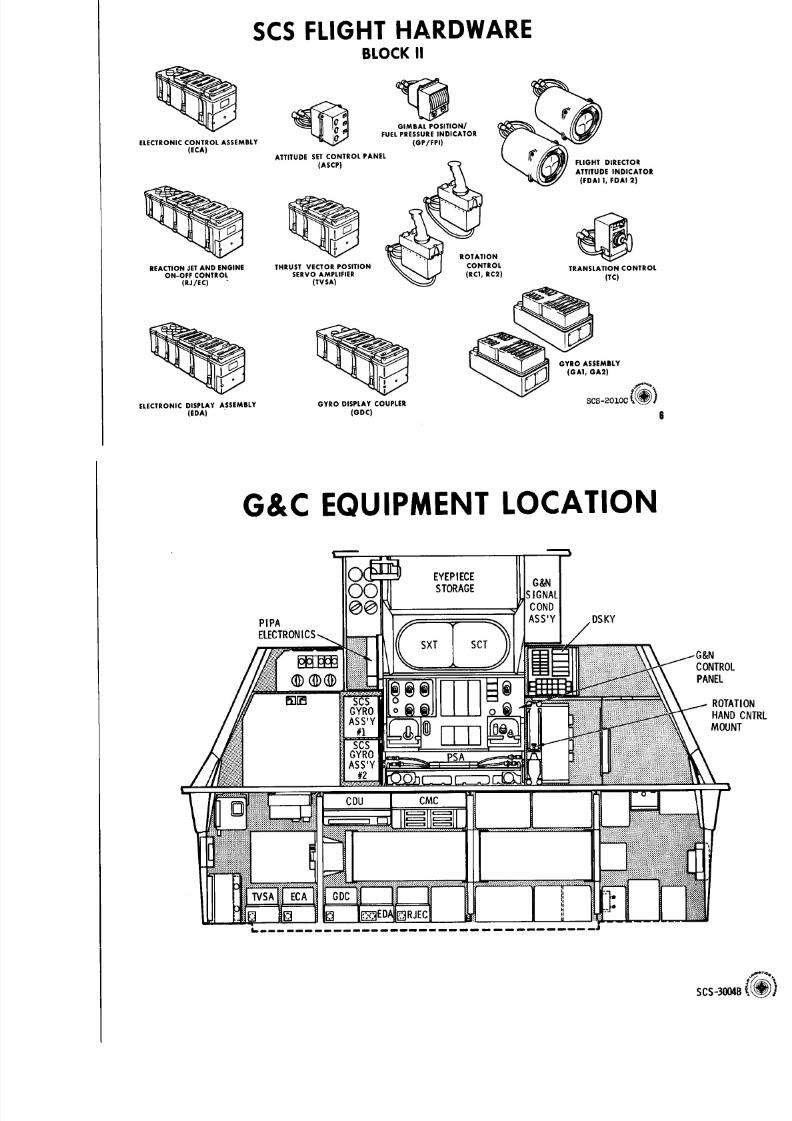
SC S FLIG HT H ARDWAREBLO CK II
.ATT PANEL _._ O.R
ELECTRONIC DI SP LAY ASS EMBLY GYRO DI SPLAY COU P LER SCS -eO'LO C _ ,_)
(EDA) (GDC) 6
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 11/148
ZC<
{
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 12/148
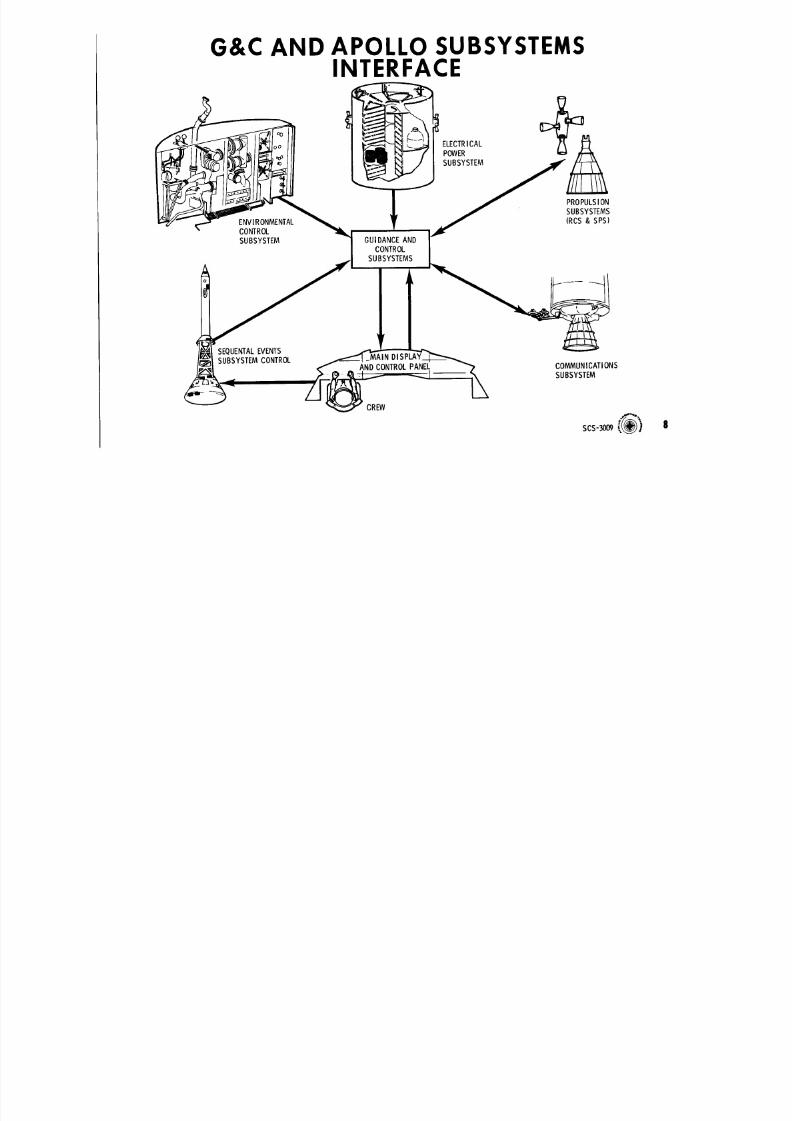
G &C AND APOLLO SUB SY STEM SINTERFACE
E L E C TA LO WRSUBSYSTEM
_"_"q_ PRO PU LSION
SUBSYST EMS
ONMENTAL (RCS& SPS)SUBSYSTE M GUIDANCEAND
C O N T R O LSUBSYSTE MS
r
SEQUENTALE VENTSS UBS YSTEMCON TROL _ MAIN DISPLAY__
ANDCONTROLP ANEL COMMUN ICATIONSSUBSYSTEM
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 13/148
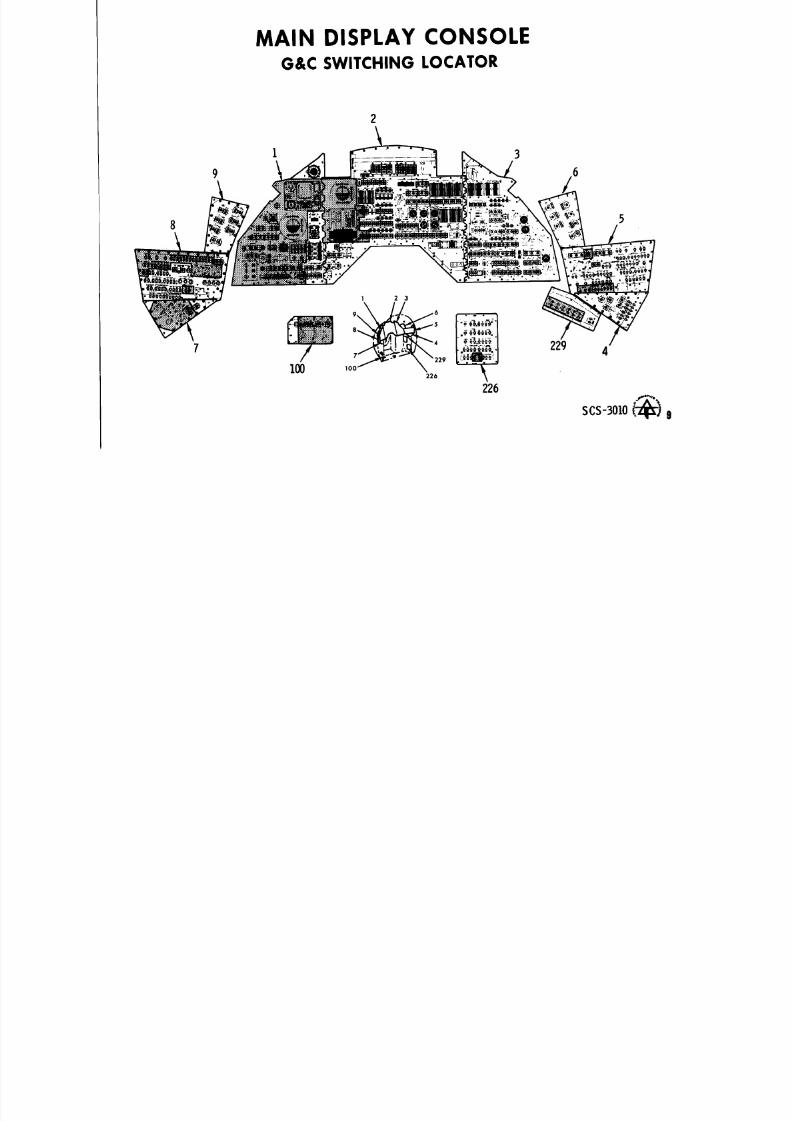
M AIN DISPLAY C ONSOLEG&C SWIT CH IN G L O CA T O R
1 3
9 ,6
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 14/148
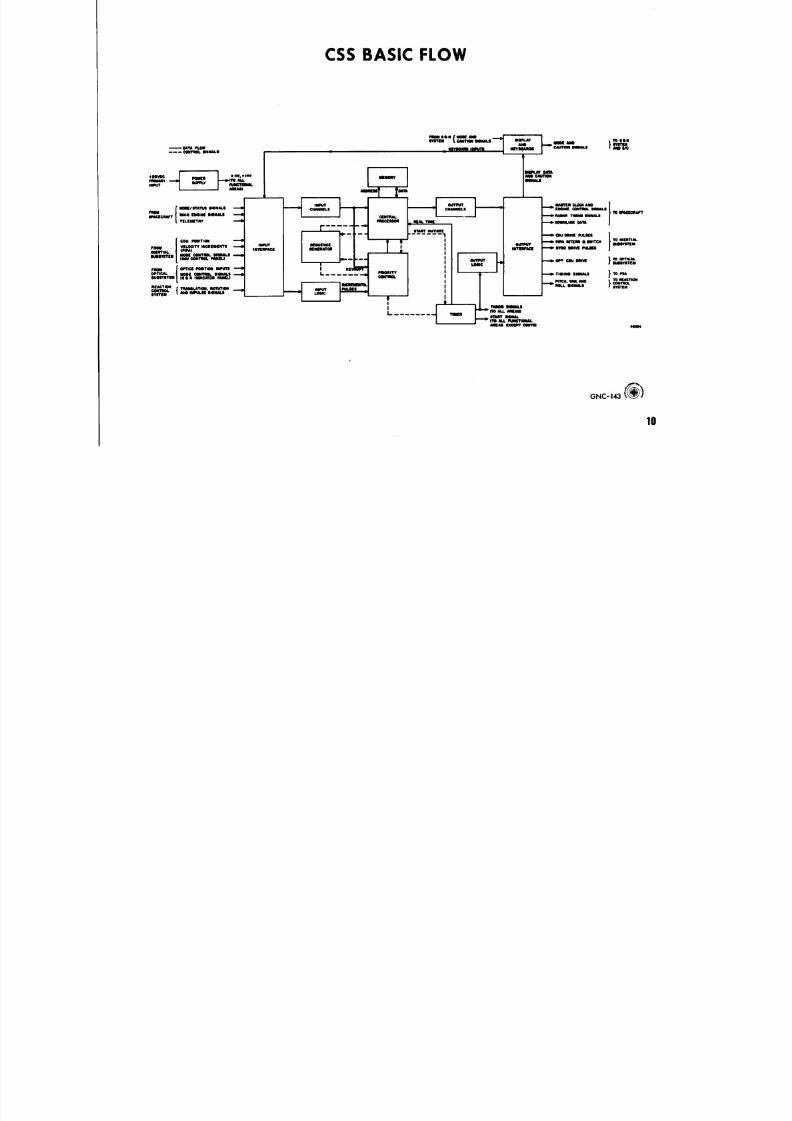
CSS BASIC FLOW
1 0
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 15/148
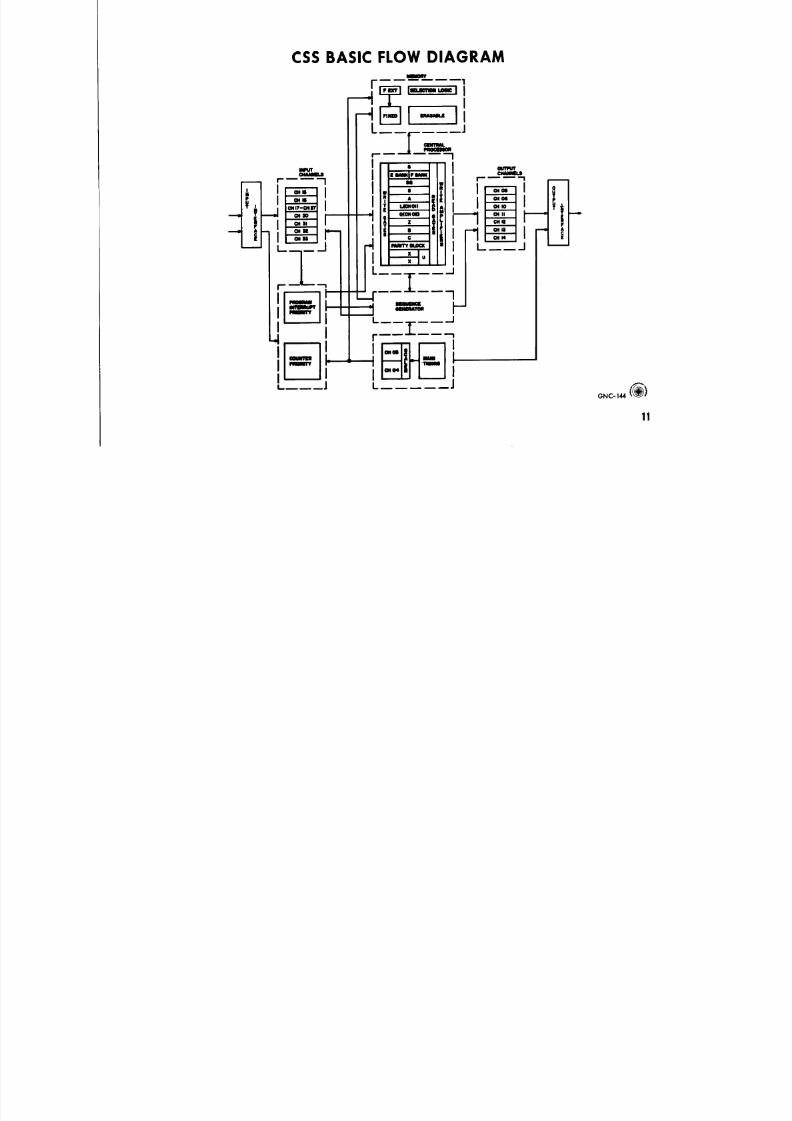
CSS BASIC FL OW DIAGRAMm
7 l--Ii
° i:7:1; 71::_L-
I-I }-II
1 1
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 16/148
N
I s¢ _Ii s J I_ c
OeI_ vl ........................
-i -Y *z _ _¥ -z -i -Y-z _ *v°z ¢ _
m* _ LI_
-. ',,Nli: -.:I: --! ,j.- ! --I I I,, , , , .,,.CONNEIO= F_ ',tIt-NOU_ _S_ Te_,e u_._r c ou pu_e i.s.s.
2 ..... @ ......._I.E EN _I_e Z[llO co _ COUN _I
T_ TR_ L _E Cill I.L g
_ _ .E ",., ,,_ *,.mu _ Ac .,'_ "----
NAW
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 17/148
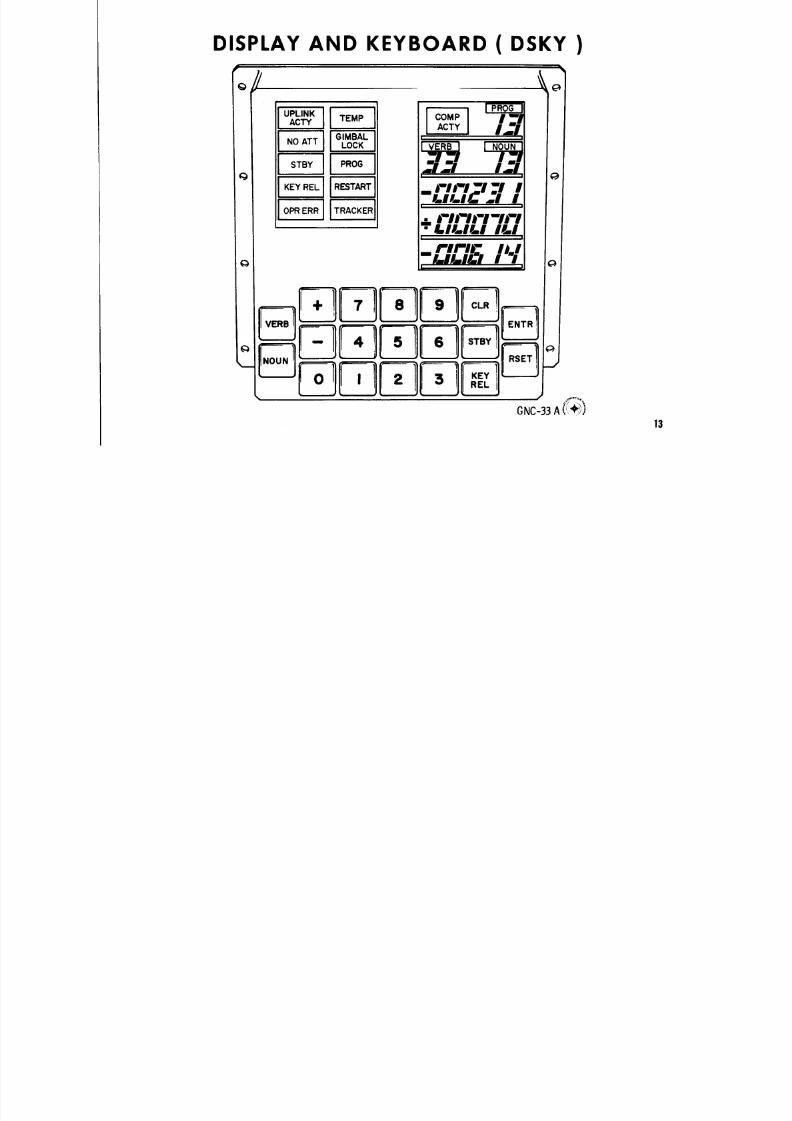
DISPLAY AND K EYBOARD ( DSKY )i
[ IPLINKACTY TEMP COMP ' _
ACTY
STBY PROG
KEYREL RE START I-- rlf"l--=1 "_! III. I.I1.1_ .I II[OPR E RR TRACKER I_I
IT &ll.l(.I II.,I II_ rl.t'!#_ " #m .#I
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 18/148
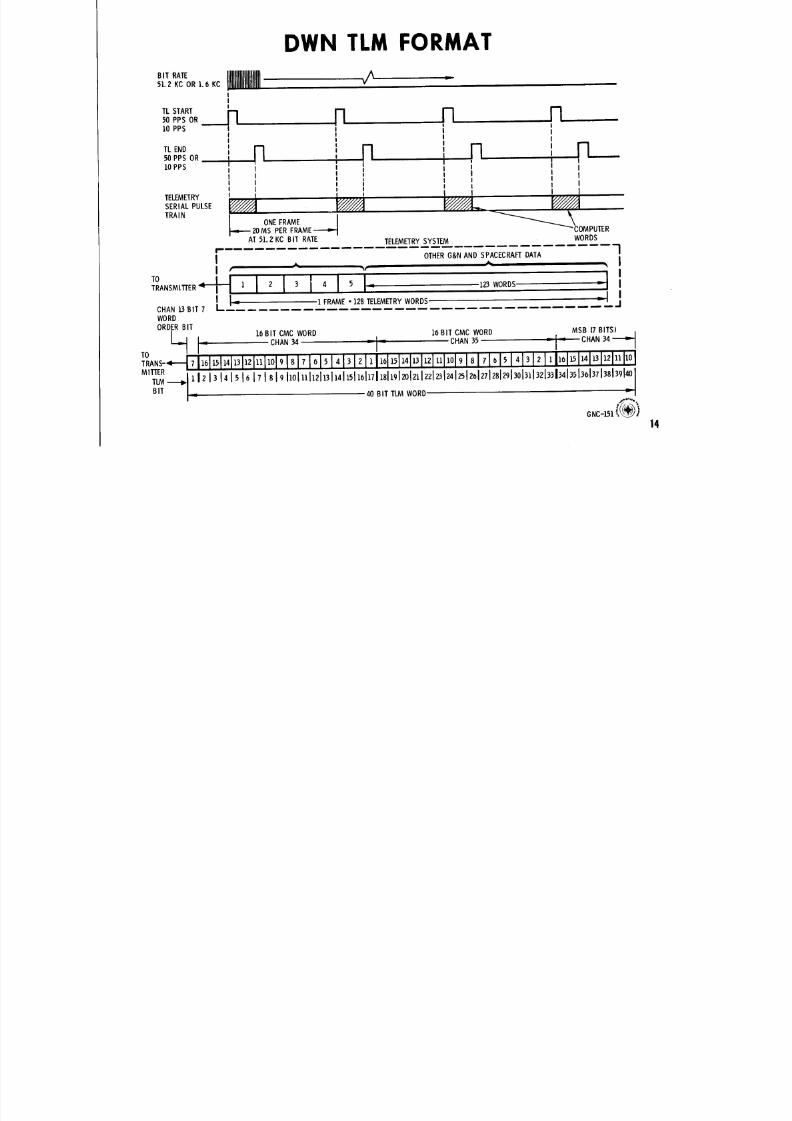
DWN TLM FORMA T51.2 KC OR 1.6KC
iI
TL S TART I N50 P PS OR ilI 0 PPS I
I
I
I I II I
TLEND ' N _ 'I r I I l0 PPS OR I , I ''10PPS I I i I I I
I I i I I II I I I I II I I
I I ' II I
TELE MET RY _ iERIAL PU LSE _ /_//_ __ [_- /_. _ / , .
'""'" I -- NE F RAME20 MS PER FRA ME' -- --"- _CO MPUTER
AT 51.2KC B I T RATE TELEMETRY SYSTE M WORDS
OTHER G&N AND SP ACECRAFT DA TAI !
, , ,,, ,i - v i i
_1 II I _ 1FRAME12 8TELEMETRYORDS
CHAN 13 BIT 7 L-.'_ .- ......................... m m _ -- ---J
WORDORD ER BIT
L_ 16 B IT CMC WORD _,_ 16 BIT CMC WORD , MSB (7 B ITS._ iI _ CHAN 34 C HAN !)5 - - CHAN 34I- I IT O
TRA"S- * -- I ',61,1,41,31,2. I,°118, 16, I , 1312,1,61,I-1131,2.I .o l,18,1 6, I, 1312, 1,6. ,I-I_31,21.,oMITTERTIM =1112 131 41' 1 6 171819Imlnlz2 1,311 41,51,61, 71 ,81,91_la221a12 41al(,1271 281 291301311:3 2133 13413'l:M371:IT _ 4 0 BIT TLM WORD _ I
o._-, ,,_ J14
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 19/148
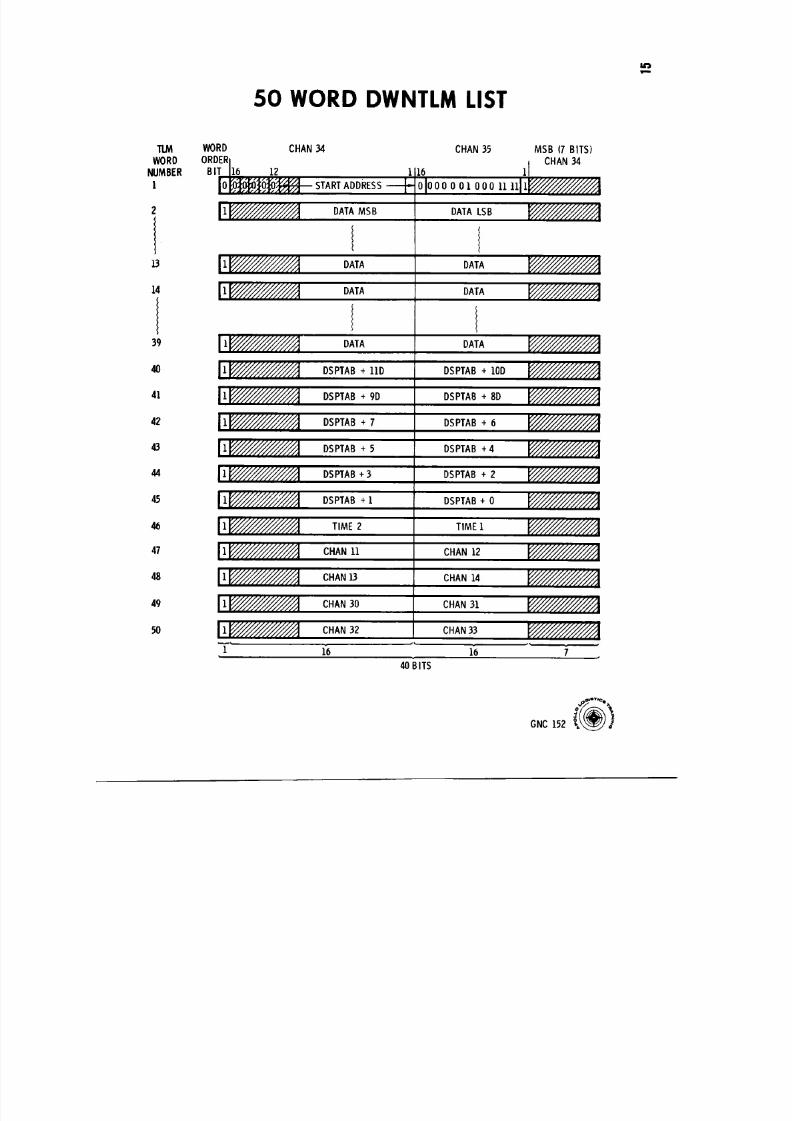
50 W ORD DW NTLM LISTTIM WORD CHAN4 CHAN5 MSB7BITS)
W O R D O R D ERNUMBER BIT I 16 Z Z I I 16 11 C HAN 3 4
1 Io_t._6 ._),- STARToo R_s s-F-Ioloooo ooo 1IzV///////////// A
2 I1V//////////// A oATASB 0AT.SB _/////J /////A
IIF ///////////// _,,T,, ° " VS//////// d14 lIF ////////// _ / _ATA OATA W/_/_/////////A
39 I1_ ///////////// _ OATA OATA W_////////// A4O ll_///////////// _ OSPTAB+io OSPTAS +oo F//////////////A41 ll_///////////// _ OS PTAB ÷0 O SPTAB +O _//////////// A42 l i _/_'////////////",//_ DSPTAB+ 7 DSPTAB+ 6 _/_/'// '////////_/ ,_ ////_
43 II_ //////, Y///// AsPTA ÷_ 0SPTA+4 F --///,// J /////
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 20/148
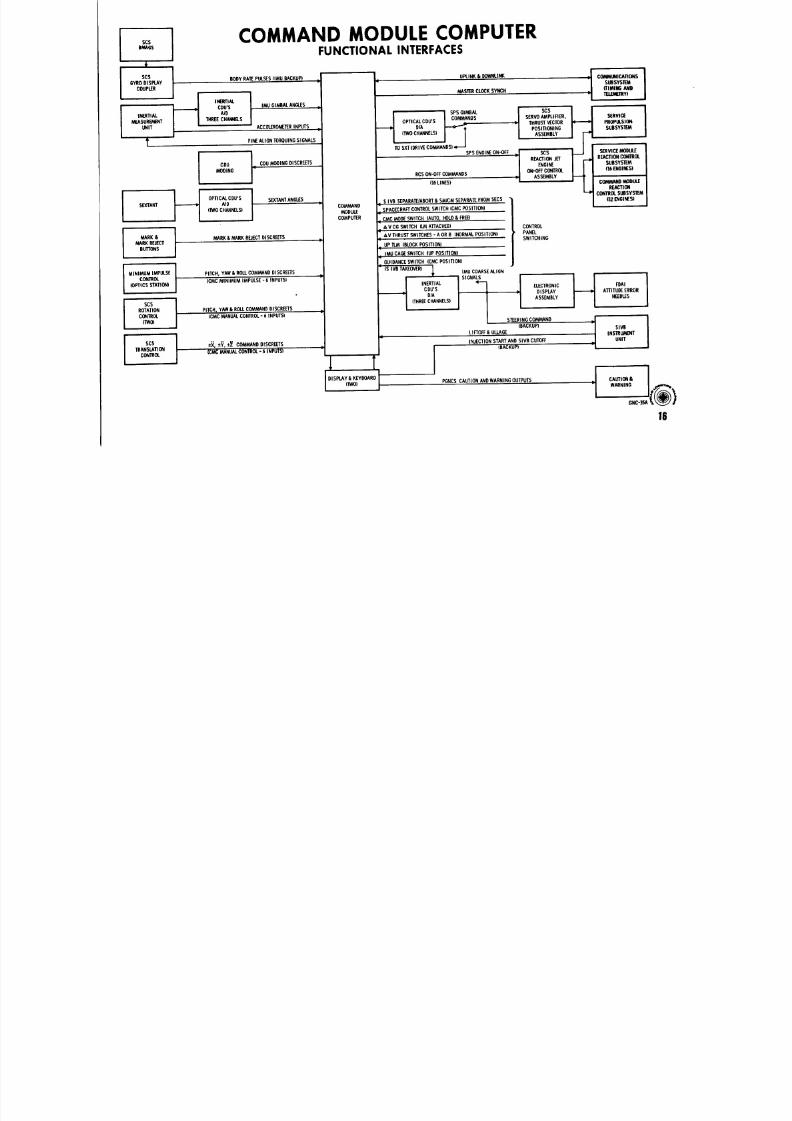
_:sJ COMMAND MODUL ECOMPU TERs FUNCTIONAL INTERFACESt
SCS [ I i[ [
COUPLER SUBSYS _.M
I MASTERLOCKYNCH (TIMINGAN DNERTIAL -I _LEJdE'IRY)
INERTIAL A/D SPSGIMBAL SCSMEASUREM ENT THREEHANNELSOP TICALOU'S COMMANDS SERVOAMPLIFIER, SERVI( _E
UNIT ACCELEROA4EERNPUTS t : D IA :_ _ THRUSTECTOR PROP ULSION
TOSXTDRIVECOMMANDS)
CDU CDUMOOINGD ISCREET$ REACT IONET . p REAC TIONONTROLMOOING ENGINE SUBSYSTEM
RCSON-OFFOMMANDS ON-OFFONTROL I]6ENGINES)
(16LINES) " I ASSEMBLY COMMANDMODULE
]J tl ]
REAC TIONOPTICALCDU'S SEXTANTNGLES .l,. CONTROLUBSYS1T.M
SEXTANT | ."| NO I, SIVB SEPARATE /ABORTSM/CMSEPARATEROMSECS I] 2 ENGINES)(TWOCHANNELS) COMMANOMODULE SPACECRAFTONTROLWITCHCMCP OSITION)
COMP UTER CMCMODEWITCH AUTOHOLO FREE)
t AV COSWITCHLMATTAC HED) CONT ROL
MARK& MARK&MARKREJECTiSCREETS AV THRUSTWITCHESA ORB (NORMALOSITION) PANELMARKREJECT I, SWI TCHING
BUTTONS UP11. JdBLOCKOSITION)
" ' iMUCAC, _ WITCHUPPOSITION)
l GUIDANCEWITCHCiC POSITION)
MINIMUMMP ULSE PITCH,YAW&ROLl.COMMANDISCREE TS IS IVBTAKEOVER |CONTROL _ IMUCOARSELIGN
' - 1''- ' ' I
OP TICSSTATJON) (CMCMIN IMUMMPULSE6INPUTS) Il ELEC TRONIC FOAlC D U ' S
"1 o /A l -"l DlsPu_',' i :! ALTITUDERRORCS I (THREEHANNELS) ASSEMBLY NEEDLES
ROTATION PI TCH.YAW&R OLLCOMMANDISCREETSCONTROL (CMCANUAL ONTROL 6INPUTS) P
(IWO) STEERI NGOM_ND J
(BACKUP) 1 1I LIFTOFF ULLAGE SIVB
I N S T R U M E N TSCS + _, :e _,±_[ COMMANDISCREETS INJECTIONTARTNOSiVBCUTOFF UNITTRANSLATION _,
CONTROL (CMCMANUALONTROL 6 INPUTS) I (BACKUP) - I ,
,1 l I
I DISPLAYEYBOA RD(IwO) PGNCSCA UTION NOWA RNINGUTPUTS "l '[ CAUTION,WARNINGoNC.)M('._)l'_l
1 8
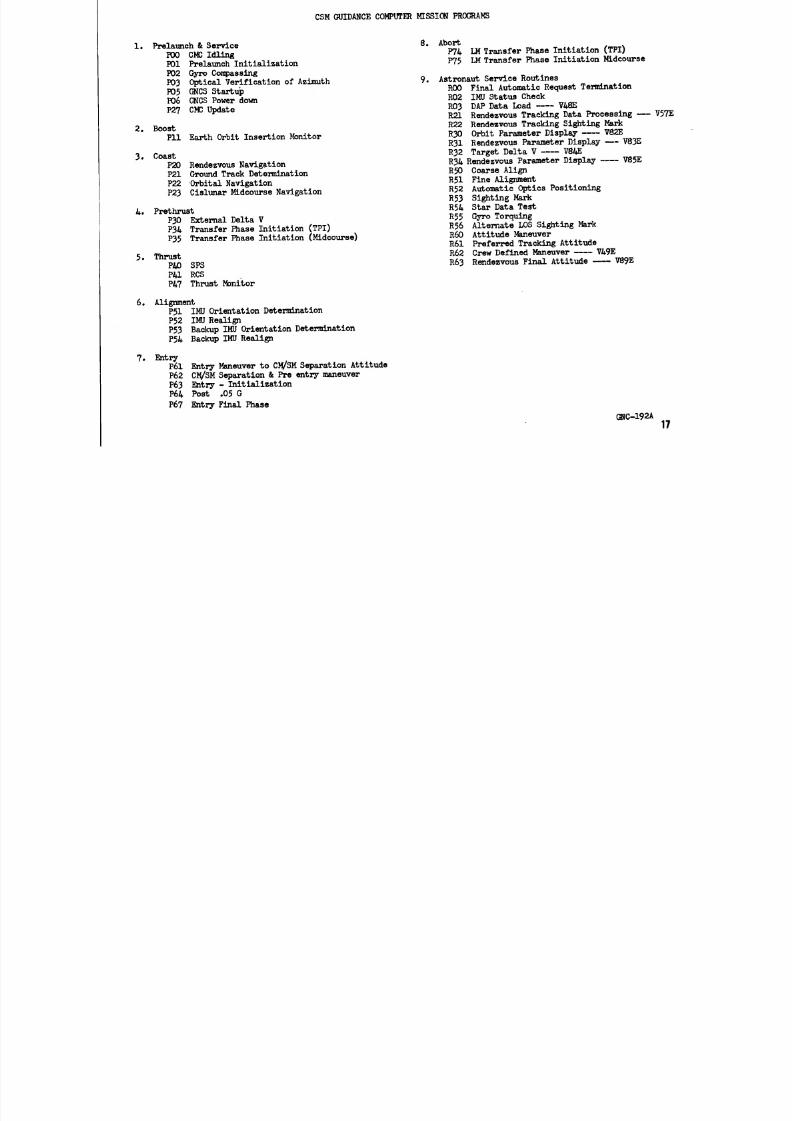
CSM GUID ANCE COMPUTER MISSIO N P ROGRA_S
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 21/148
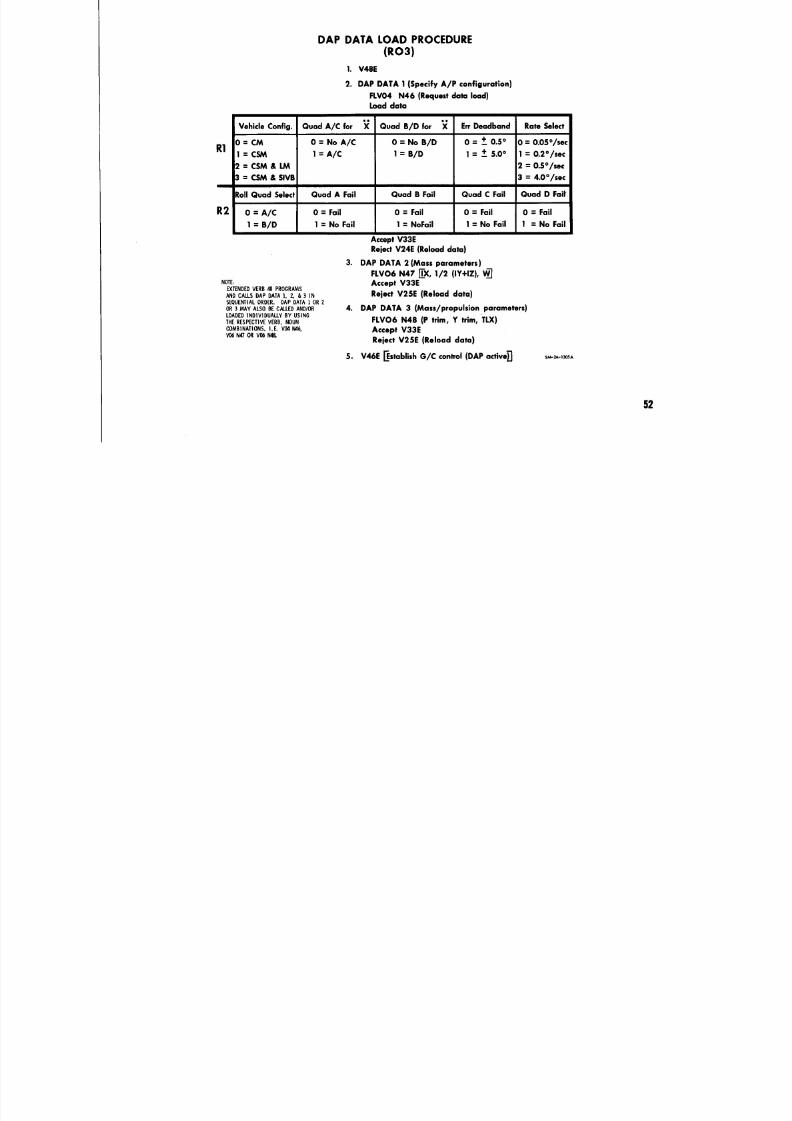
i . Pre l at_c h & Servic e 8. AbortPOO CMC Id li n g P7_ LM Tra n sfer Phase Init i ation (T PI )POI Prelaunch Initializatio n P75 LM Transfer Phase I n itiation MidcourseP0 2 Gyro C o mpassi n gPO3 Optical Verification of Azimuth 9. Astronaut Service Ro u ti n es
RO0 Final A u tomatic Request Ter minati o nP05 GNCS Startu ' p R 02 IMU Status Chec k
PO6 GNCS Power down R03 DAP Data Load -- -- V h SEP27 C MC Update R21 Rendezvous Tracking Data Processing _ VST E
2. Bo o st R22 Ren d ez v ous Tr a cking Sighti n g Mar kPII Earth Orbit Insertion Monitor R30 Orbit Para meter Display -- - V82E
R31 Rendezvous Para meter Display --- V 8 3E
3. Coast R32 Target Delta V • VS h ER 3h R endezvous Parameter Display -_ V@5E
P20 Rendezvousavigation R50 CoarseAlig n
P21 Gro u n d Track Determi n ation RSI Fine AlignmentP22 Orbital Navigation R52 Automatic Optics Positioni n gP23 Cislu n ar Midcourse Navigation R53 Sighting Mark
h . Prethrust R5 h Star Data TestP30 External Delta V R55 Gyro Torqui n gP3 h Transfer Phase I n itiation (TPI) R56 Alternate LOS Sighting MarkP35 Transfer Ph a se I n itiation ( Midcourse) R60 Attitu d e Maneuver
R61 Preferred Trac k ing Attitude
5 . Th rust R62 Crew Defined Ma n euver _- VAg EP&O SPS R63 Ren d ezvous Fi n al Attitude -- V89EPAl RCSPh 7 Th rust Monitor
6. Alig n me n tPSI IMU Orientation Determinatio n
P5 2 IMU Re a lignP53 Backup IMU O rientation DeterminationPS h Backup IMU Reallgn
7 . E n tryP61 E n try Maneuver to CM / SM Separatio n AttitudeP62 CM / SM Se p arat ion & Pro entry maneuverP63 Entry - I n itializa t ionP6 h Po st .05 G
P67 Entry Final Phase
GNC-192A
I ?
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 22/148
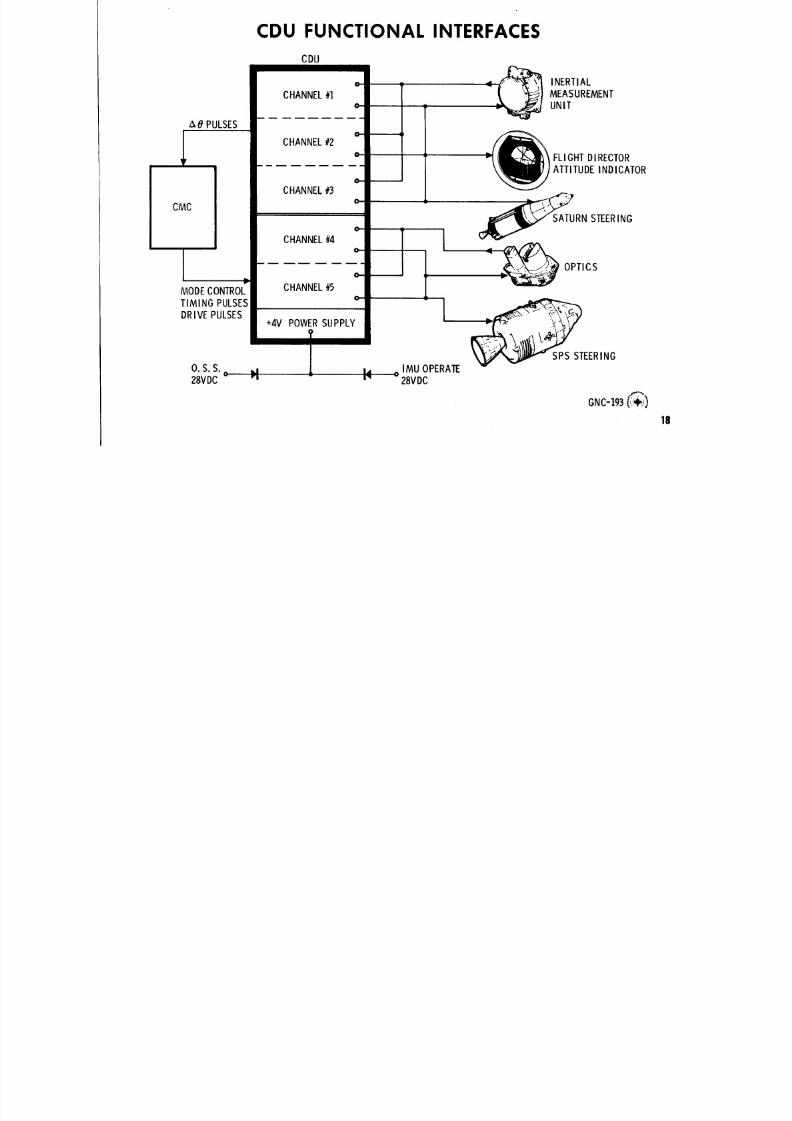
CDU FUNCTIONAL INTERFACESCDU
_ INERTIA L
CHANNELI MEASUREMENTUNIT
A # PULSES
I CHANNEL02 _ FLIGHT DIREC TOR
AT T IT U DE I NDI C ATO R
C HANN EL #3
CMC
SATURN STEERING
CHANNEL4 I
I < _ OPTICSc
T
MODE CONTROL CHANNEL # 5 I
TIMINGPULSES " _T
DRIVEPULSES +4 V POWERSUPPLY
EERING
O.S.S. c d IA o IMU OPERA TE28VDC ,'l _ 28VDC
GNC-1 9 3 )
1 8
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 23/148
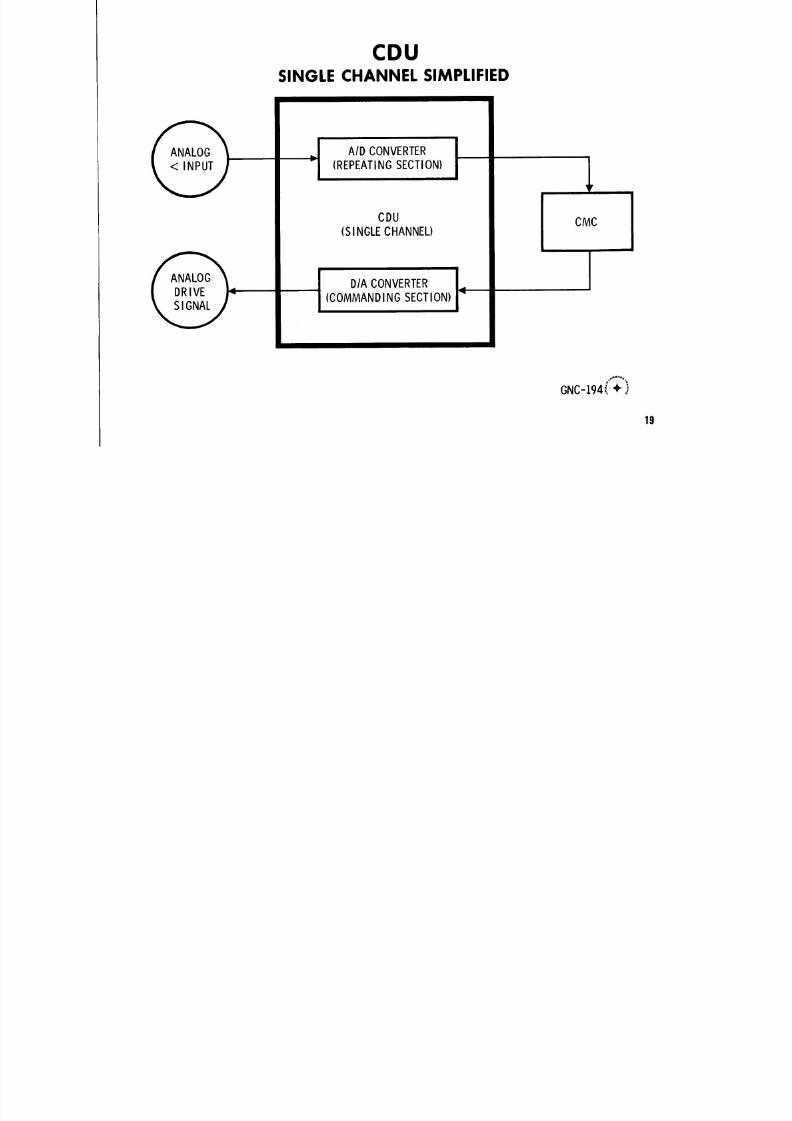
C DUSIN GL E CH A N N EL SIMP LIFIED
CDU C MC(S IN G L E C H A N N EL )
ANALOG D/ACONVERTERDRIVE (CO MNIANDNG SECTION)S I G N A L
o
GNC-1 9 4{ ¢"o)
1 9
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 24/148
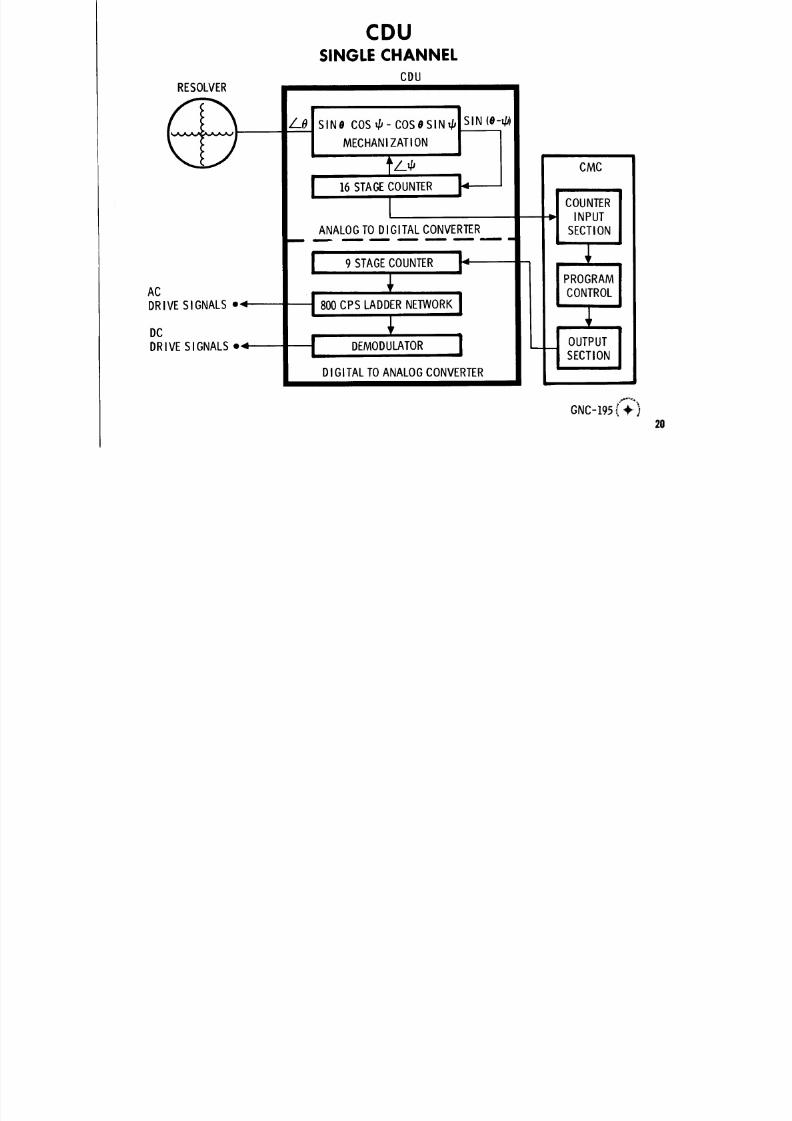
C DUSINGLE CHANNEL
RESOLVER CDU
SI Ne COSqJ- COSOSI Nq_ I N (O-VJ)MECH A N I Z AT IO N
'/q' CMCi 16ST AGECOUNTER [-
I COUNTE RINPUT
ANALOGTOb l GITALCONVERTER S ECT ION
9 S TA GE C OUN TER
AC PROGRA M
DRIVESIGNALS•_ 800CPS LADDERNETWORK CONTROL
oc IDRIVES IGNALS• _ DE MODULATOR OUTPUTSECTION
D IGITA L T O A N A LO G CO N V ERT ER
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 25/148
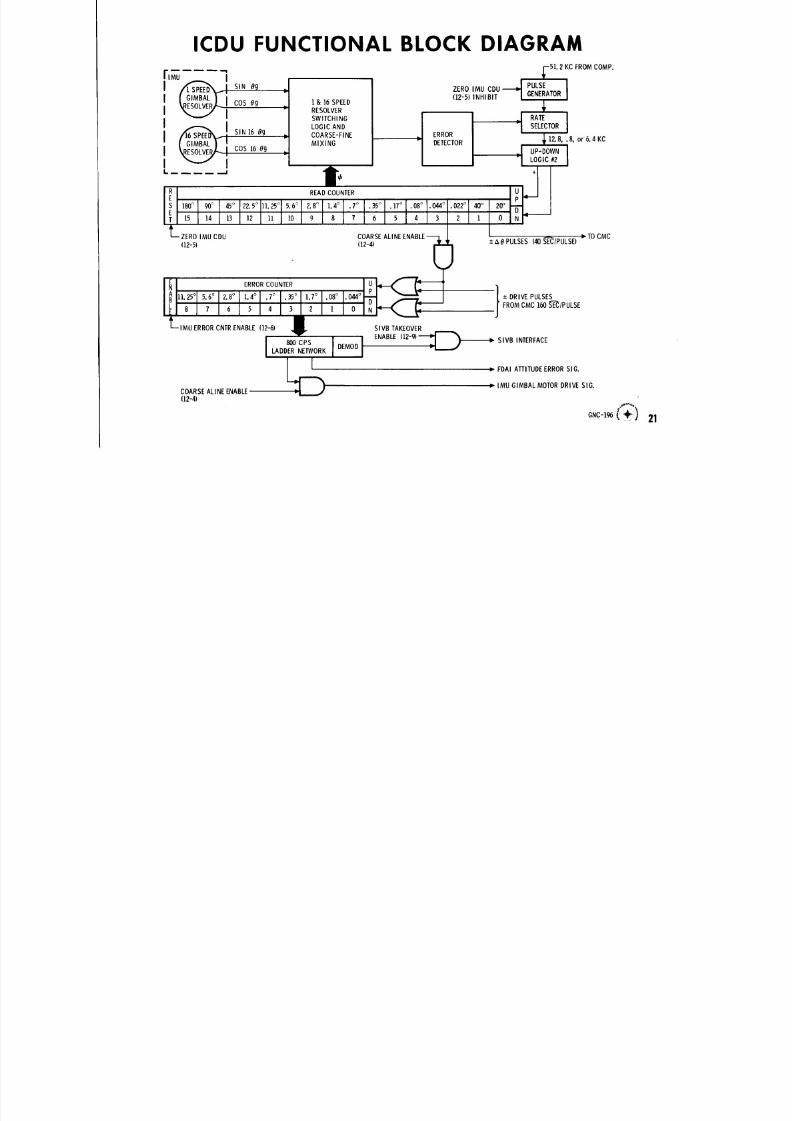
IC DU FUNC TIONAL B LOC K DIAG RAM--51 .2 KCFROMCOMP.r,Mu l
_ ....J . SIN Og ._ ZERO IMU CDU_ PULS EI&16SPEED
GENERATOR(12- 5 )N H I B I T
COSg -_ RESOLVERSWITCHI NG d RATE
LOG CAND SELECTOR
I 8g =, COAR SE-FINE : 12 .8, .8 , or 6.4 KCS IN 16 ERROR
MIXING DETEC TORUP -DOWN
COS ]6 8g =, ; LOGIC#2
L ._J 1_¢ +Ig
R RE ADCOUNTER UE p :S 1 8 0° 9 0° 45° 22 . 5 11.25 5. 6° 2.8° 1.4° . l ° .3 5° . 1 7° .08° .0 44 !. 0 22 40" 20" --
D5 14 13 12 II I0 9 8 1 6 5 4 3 2 I O N =
f ZEROMUCDU _ "----_TOCMC(12-5) (12-4) + A l_PULSES ( 4 0SEC I PULSE)
U "I
2. 8° 1 . 4° 7° 044° _ } + DRIVEPULSESn FROMCMC1 60_-E_ /PULSE
J
IMU ERRORCN TRENABLE(12-6) S IVB TAKEOVER
[ LADDER800ET Wo RKCPSDEMOD I ENABLE (12- 9 )'_ [ _ _ SIV B I NTERFACE
[ • FDAIATTITUDER RORS IG.• IMU GIMBALMOTORDRIVES IG.COARSEA L IN E E N A BL E( 12-4)
o . ,_..c,,%
GNC-IQ6 (r _,:) 21
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 26/148
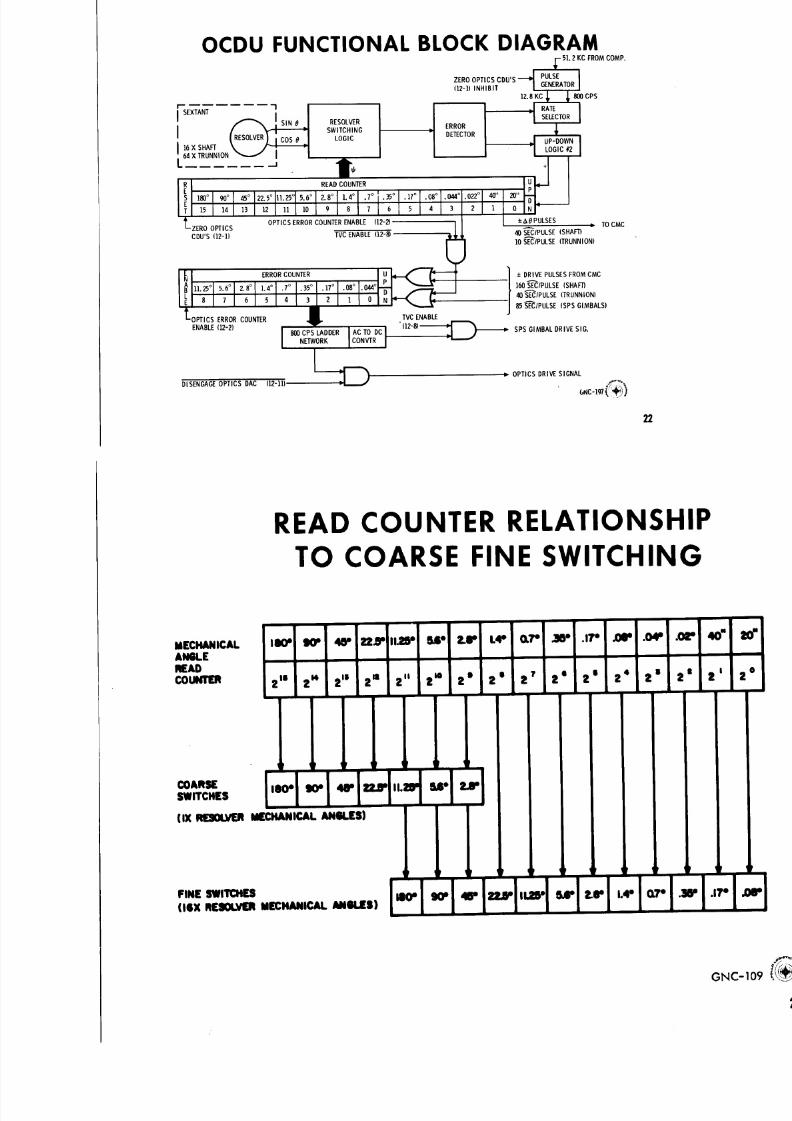
OC DU FUNC TIONAL B LOC K DIAG RAM_--51. 2 KC FROMCOMP.
ZEROO PT ICSCDU'S J PU LSE J(12- 1) INHIBIT -J G ENERATOR
1 2 8 K c _ _ c P s
-- _EXTANT - I RAT ERESOLVER SELECTOR
,__ E RRORSIN 0 i, SWITCHING D
Kr. }uLvr ._ _ I COS 0 L LOGIC DETEC TOR d UP -DOWN16X SH AF T _6 4 X TRUNNI ON _ j I LO GI C#2
--- +R READ COUNTER U
' ° il1 8 0° 9 0° 4 5 o 22.5 °11 .2 5 5. 6° 2. 8° 1.4° .35 ° 1 7° . 0 8° .044 . 0 22 40" 20" P
• " O _
1 5 14 1 3 1 2 1 1 1 0 9 8 7 6 5 4 3 2 I O N
OPTICSERROR COUNTERENABLE (12-2) ±,', OP ULSES _ TO CMCZERO OPT I CSCDU'S ( 12-I) TVC ENABLE (12- 8 ) 40_S'E'C l PULSESHAFT)
1 0_ I PULSE (TRUNN I ON)
E ERRORCOUNTER U / ± DRIVEPULS ESFROMCMC11.25o5.6o 2.8° 1.4° .7o .35o 17° .08o .044 P. ] 60 S"_ / PULS E( SHAFT)
• D J 40 " _ ' C/ PULSETRUNN I ON)[8 7 6 54 3 2 1 ON 85 _"EC/PUL SESPS GIMB ALS)
tOPTICSERROR COUNTER I L .TVCENABLEENABLE12- 2) (12-8)800C P SL ADDER AC TO DC SPSGIMBALDRIVESI G.
NETWORK CONVTR
D, OPTICSDRI VESIGNALDIS ENGAGEOP TICS DAC (1 2 - 11 )' _"_'_.
_ . c - i _ ( + )
2 2
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 27/148
C DU C OARSE M O DULE B LOC K DIAG RAM
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 28/148
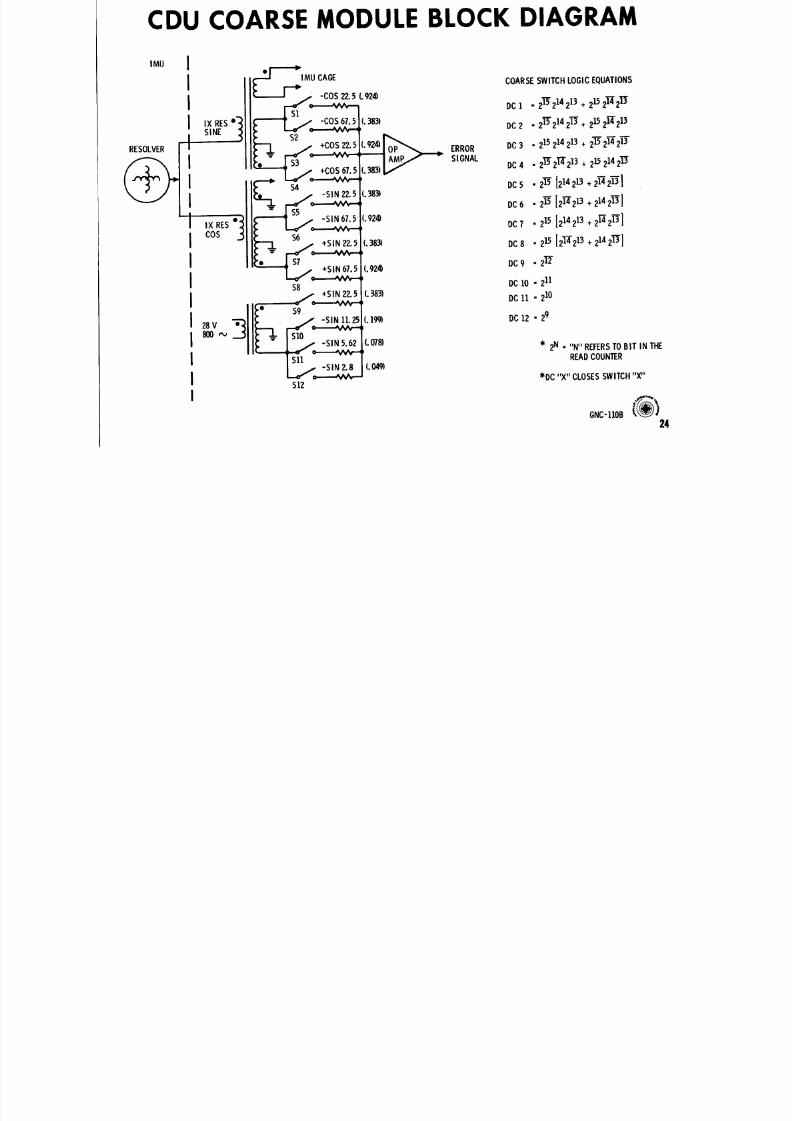
C DU C OARSE M O DULE B LOC K DIAG RAMIMu J
I "1 ",.. CAGE
ixRES" : )l - COS7 . S( . )8))
s3_ :' !AM rt,/ . ERRORp c3 -2_21413 2_2_ z_
Iq 3 , SIG NAL 2.[-S .i-4..213 2 152142 T,_.
I + co s7._. :_31 pc4 - +, DC6 - 2] ''_ [21 '-4"2132142 ])"]
I cos _ _s_ _ oct . 21_12142132_2_(.3831
I - _ De 821512_213214_1I +SIN67 .5 924) OC9 - 2" I)"vV_.--,
j $8 N V_ DC10- 211,/c +SI (. 38 .? , ) DC II " 210
28V -S IN 11.25 ( .199) DC 12 " 29
J 800 ,' ,.., *_VV---,-SIN 5.62 (. 078)
I I_, '_ -.,vv- * 2N.,.,,REFER SOITNTHEi -SIN 2.8 (.049 ) READCOU NTER=,_VN.
j S 12 *OC "X" CLOSESSWITCH X"
24
67 5
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 29/148
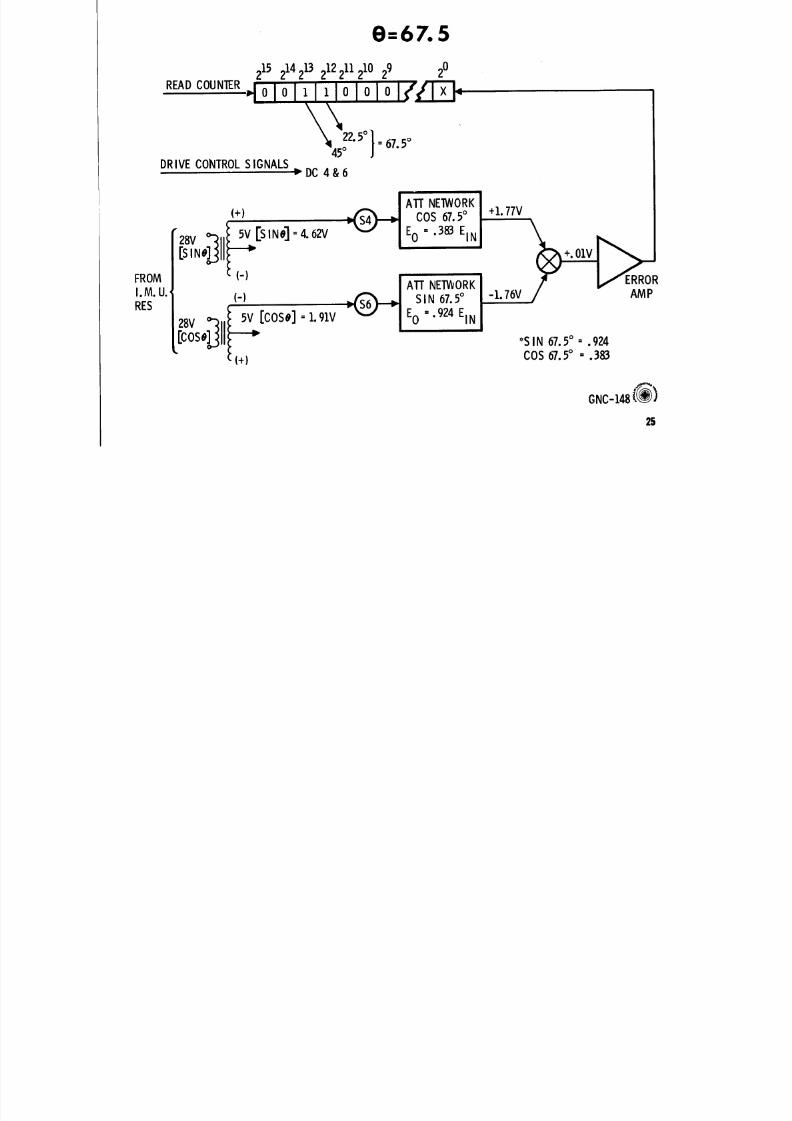
e=67.5
21 5 21421 3 212211210 29 20READCOUNTER.
22.5° 1 --67 .5°4 p ° J
DRIVECONTROLIGNALS_ DC 4 &6
FROM|
'.M.U. (_, . .. = (_;-S-LN -67 . ; ,5 ; - _ AMP
RES J2sv _ I sv [cose ]:l.91vI I" COS 67 .5 = .383(+)
G.c-.s C )25

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 30/148
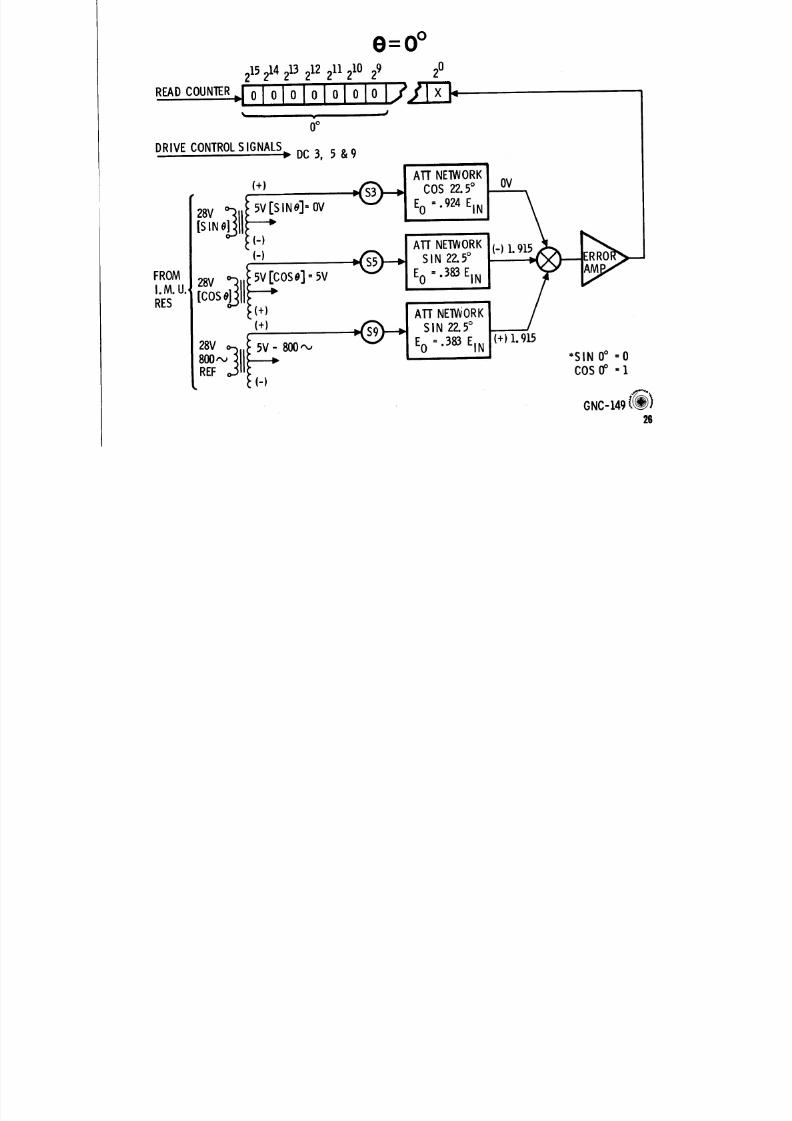
e =O°2 1 .51 42 1 3 2 1 2 2 1 12 1 0 2 9 2 0
READCOUN'[ER . !01 Of 0 I0 I 01 0[0 l. , _.Jl-'_ llJ
6oDRI VECONTROLS I GNALS._. DC3, 5&9
Al l "NEIWORK(+ ) COS 22. 5° 0V
V v ,l[S IN
I- i
I.M.U.[COSR ES(+) AllNE'[WORK(+) SIN22.5
_- +)I.1.58V 5V 800 , -v EO .383E I N
8oo_ °311 ; *SIN 0°" 0REF ll_: coso°-I
(-)
ONC- 4 92 @
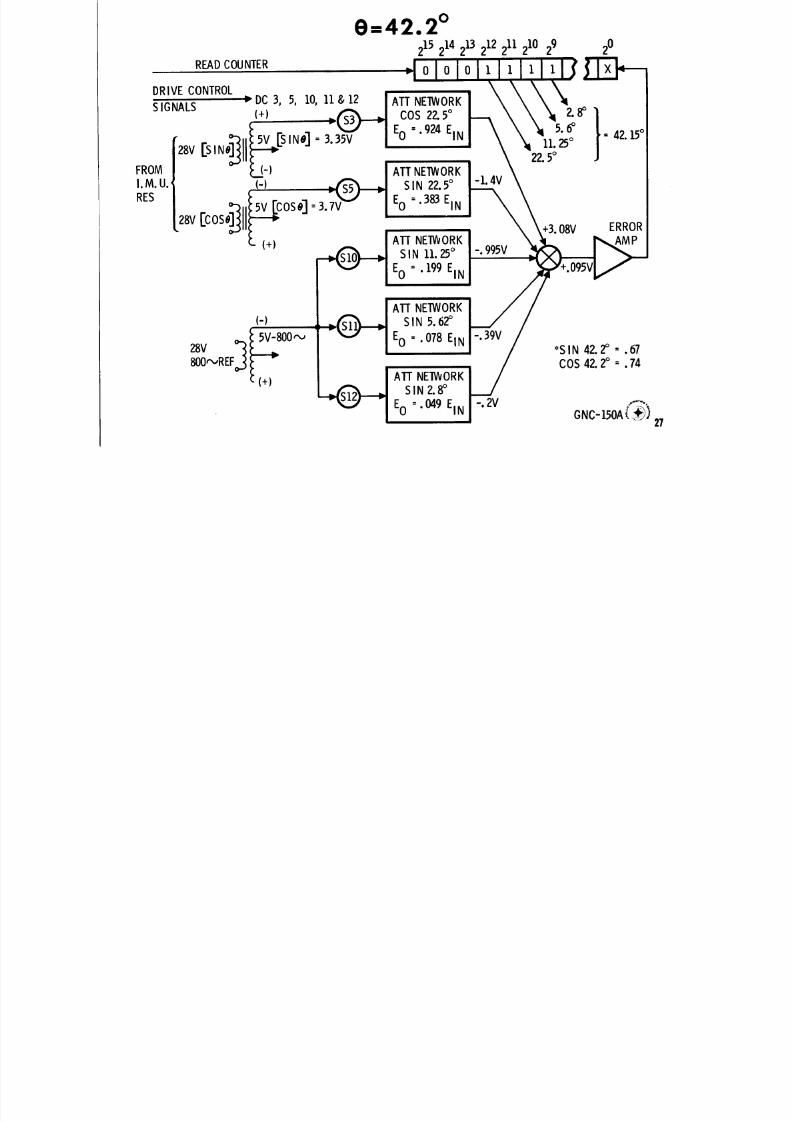
e=42 2 °
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 31/148
e 42 .221.51421 3 212211210 29 20
REAl)COU_IE.-_R ,:_]'I_ IDRIVECON TROL.- DC3, 5 ,10, 11& 12 ATTNE1WOR K \ \ \ W
SIGNALS +) .., 'C - ".,: ECOS.22_E, . ,COS2. 5° _ ' x_"W S ._ _ .,,., ,:2.8°
22.5° JFROM ( - ) A TT NETWORKI.M.U. SIN 22..5 -1.4V
RES EO --.83EIN5V [COS #]= 3.2 8 V +3.08V ERROR
(+) All"E'IWORK AMPS IN 11.2 5° -.99 5 V
EO : .1 9 9 E IN
AT T N ET WO R K
(-) SIN 5.62°
28V o-_ 5V-800"- , EO : .078 EIN -. 39 V "SIN 42.2° -- . 67800""RE Fo.._ COS 4 2.2° = .74
(+) ATT NE TWORKS I N 2. 8°
EO =.049ElN -.2V ._",GNC-1 5 0A{_)2 7
DIG ITAL TO ANALOG C ONVERTER
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 32/148
DIG ITAL TO ANALOG C ONVERTERM O DULE B LOC K DIAG RAM
TYPICAL ICDU CH ANNEL
+ PDA --_ • POLARITY
-IDA
I-o .I 1..,...
•°°U"T" -I"' _" .O .
Si G
NV 81_ r_D S
2 8
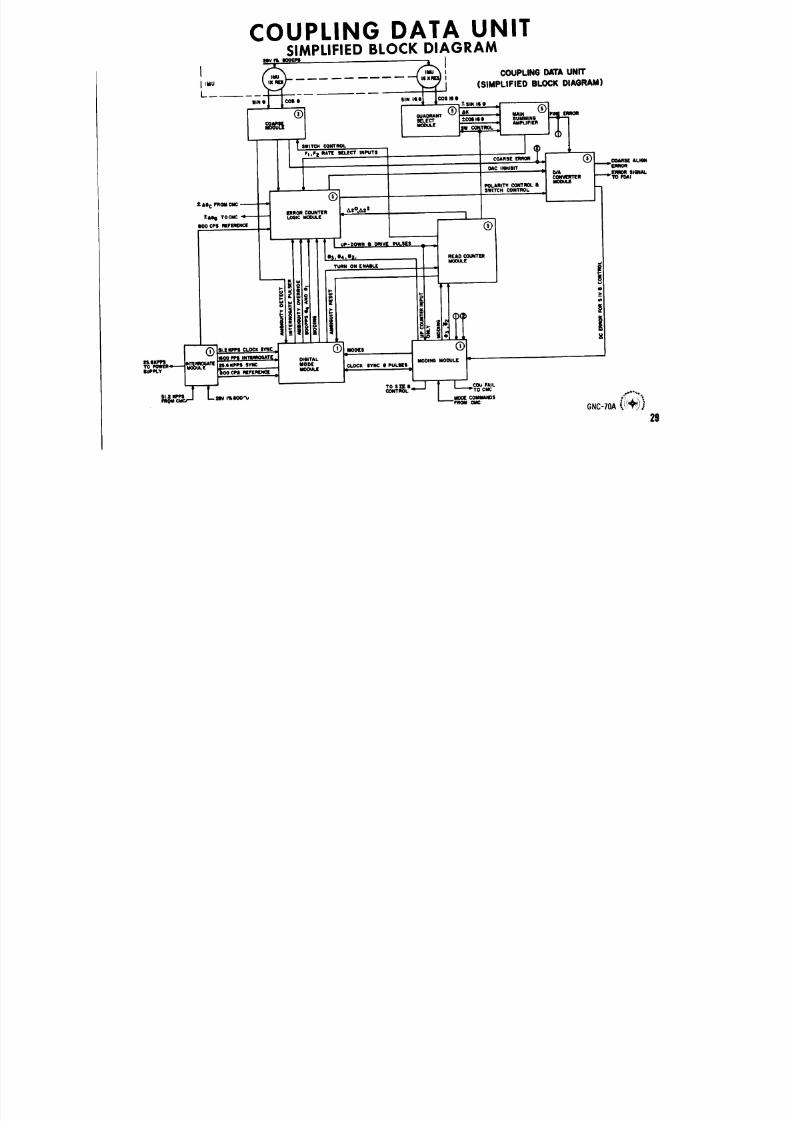
C O UPLING DATA UNIT
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 33/148
C O UPLING DATA UNITSIMP LIFIED BL O CK D IA GR A M
i Muu I (SIMPLIFIED BLOCKDIAGRA )
| 1/ .*-SIN llle .J ( _1
I_ _,,,_ J I 1 I
L1.i,.,,.-; c-,w-,, ®.1__,.__ I J _nom¢ou. _m I. A'°_z"
•,,., To_"-"-1"7 _ .oo ,_ I ®oo ¢ps IEFI[_NCE [ J
- I
I t
2 9
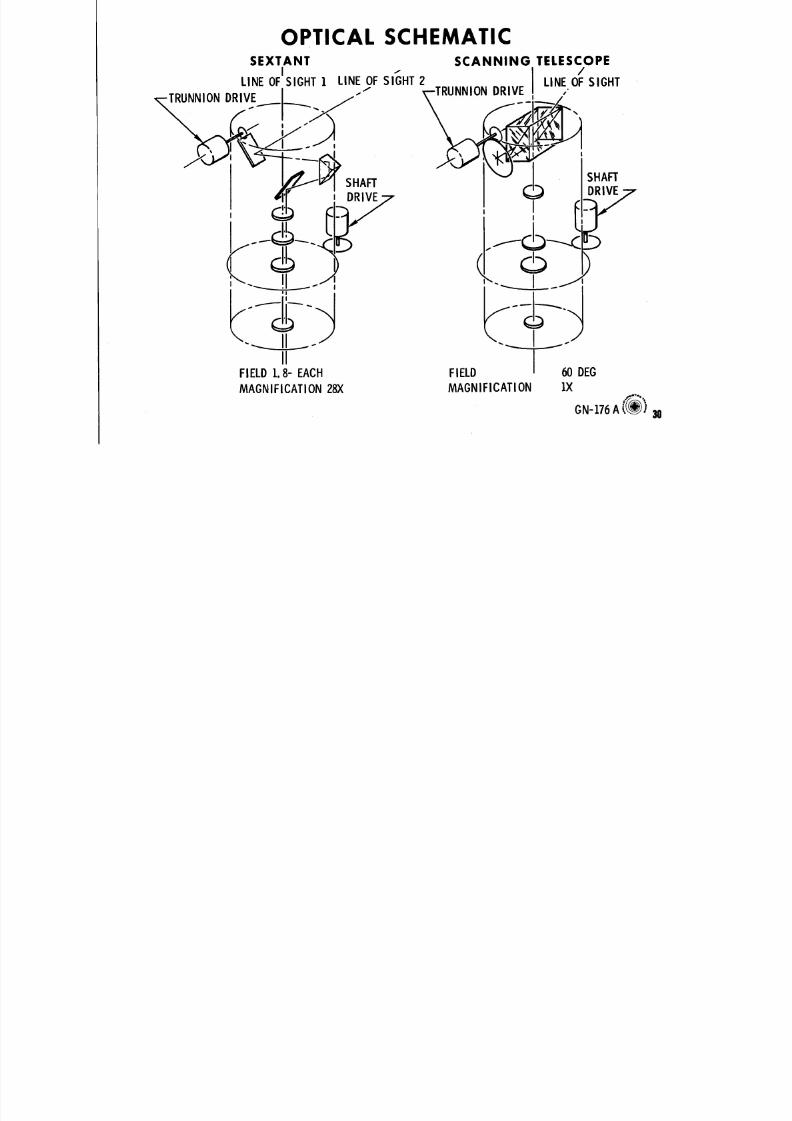
OPTIC AL SC H EM ATIC
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 34/148
OPTIC AL SC H EM ATICSEXTANT SCANNING TELESCOPE
LINE OFIsIGHTI LINEOF SI'GHT2 I LINE O_ SIGHT
TRUNNIONu__ ,_ !__DRIVE_ _,. ",_l,_l,_,u l'_ x-TRUNNIONDRIVE I ""
I _.r' , DRIVE" 7"
- II --IFIELD1.1_ -EACH FIELD " _ '--_60 DEGMAGNIFICATION28)( MAGNIFICATION 1X
GN-176A I_
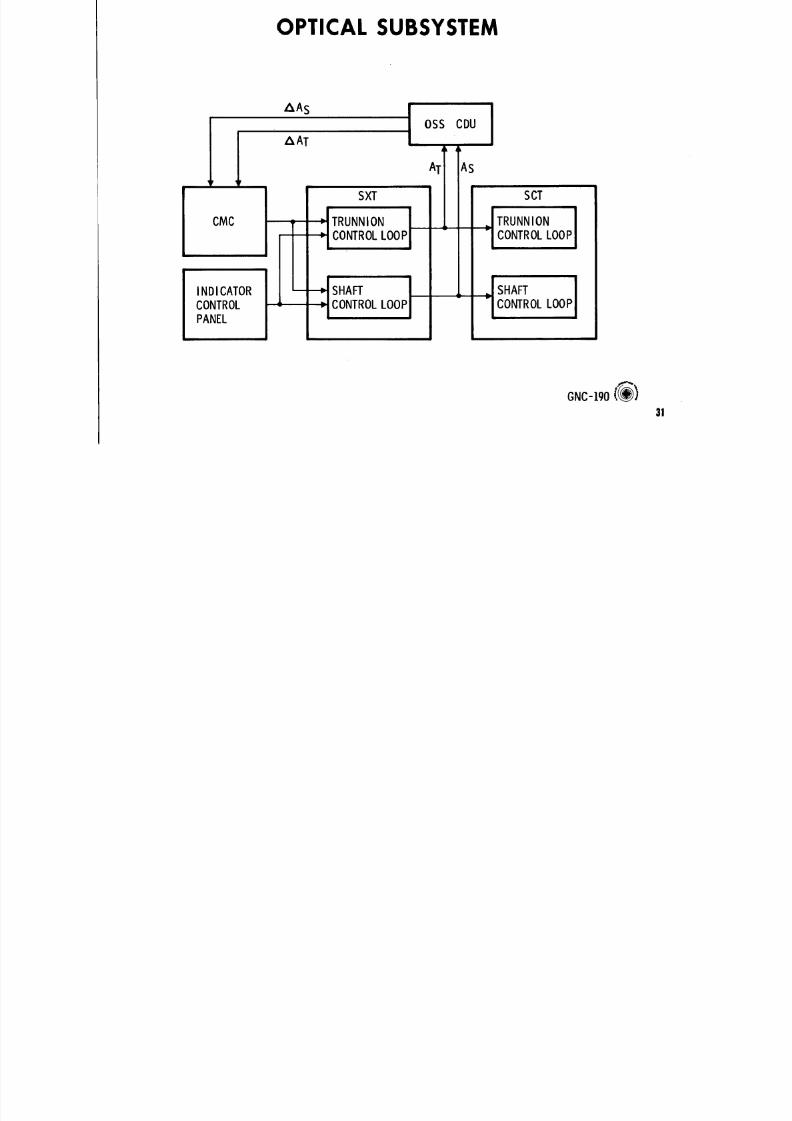
OP TICAL SUBSYS TEM
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 35/148
Z_As OSS CDU
Z_A T
AT AS
SXT SCT
CMC TRUNNI ON )NCONTROLLO0P CONTROLLO0P
INDICATOR SHAFT SHAFTCONTROL CONTROL OOP CONTROL OOPP A N E L
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 36/148
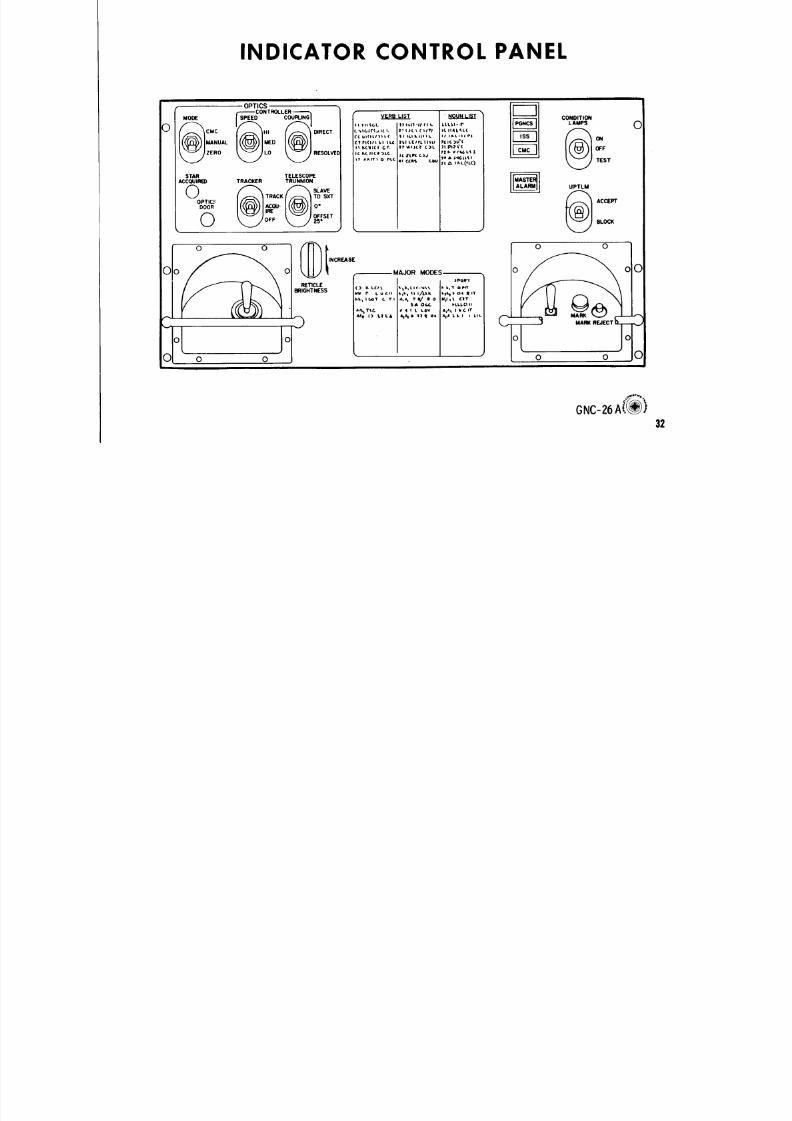
INDIC ATOR C ONTROL PANEL
I
f CONTRO LLER *t _MOOE JSPEED COUPLING/ VI _R LIST " NQUN LIST CONDITION
CMC HI DIRECT (. %1 /.,_ '( i( 1 , 7/ tt)(. l(ll'rl I(. IrAP.¢ L(
"-"MANUAL MID ctrl qt_i,i ILc . lIDILCSrLt_n _ ,¢lr.)u' l ON
ZERO LO RESOLV Jc kc llC;'' _LC. J CZtR c)a _eA PI6LLSt? m_rt 0 rLC _.,LF4 r'OU _1 A. I JR L( rt.(.) TEST
STAR TELESCOPE I _
ACCQUIR_) TRACKER TRUNNION
TRACK TOSXT
OPTIC _ ACCEPT
OFFSET..._/OFF _/ 25" BLOCK
oo o oMAJORMODES 0
_polr7
RETICLE _ l ict or. %L,LI<-_X *_,_ OewBRIGHTNESS _v r L u c. L.,% _._,/r_ %% v o ,I I_1
k_.l I(,K/'t' _, 1_1 4_A1 TI_ I_ 0 Nle111. C iT
A4_'r_,G m 4 I I.t.G_I 4_4_ I kCIT
I
0 0 0 0I
GNC-26A._3 2
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 37/148
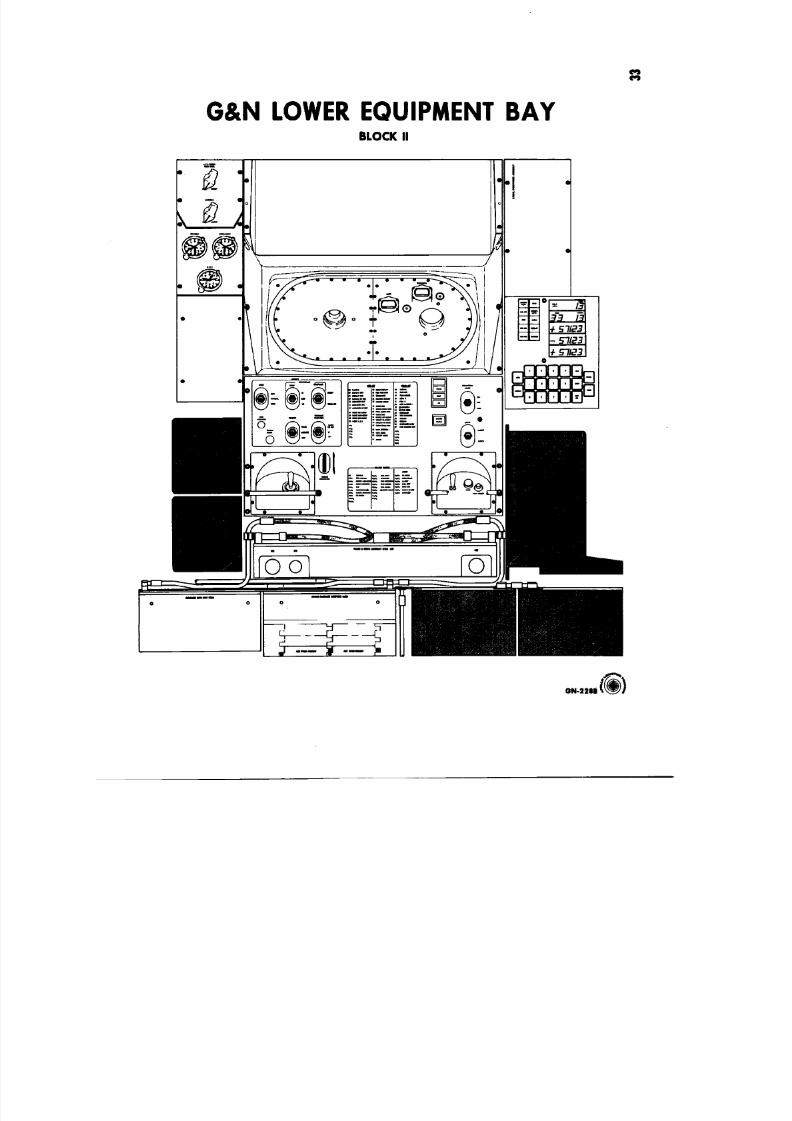
G&N LOW EREQUIPMENTBAYBL O CK II
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 38/148
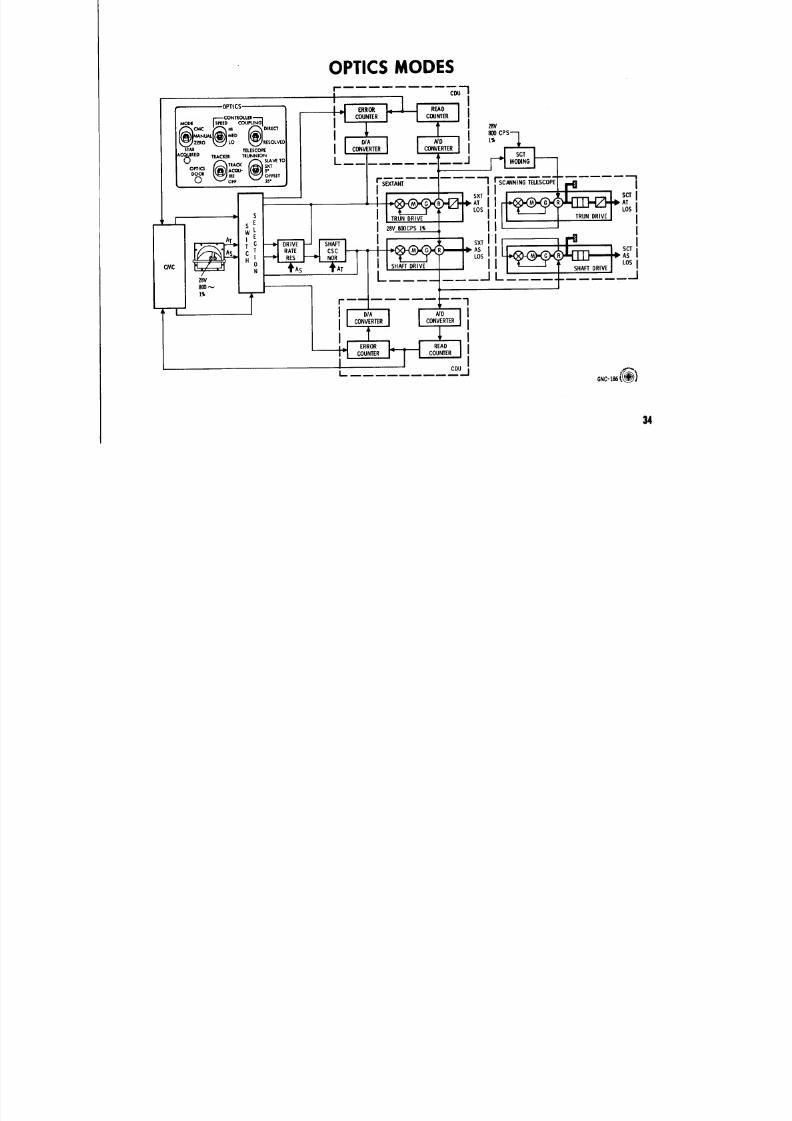
OPTICSMOD ESr"..... %.-1I I
'OPT ICS ERROR READI.._CON mOLLE U_- 1 COUNTER COUNTER J
.OD e js _m D COU _-LNG J J/,'_ '_c_c_-'_., f'_ '_D ._CT _VZER O LO RESOLVE[ D IA NO
STAR T ELESCO PE J cONVERTER CONVER TER J
AC_IRED TRACKER TRUNNIONTRACK SXT
OPTICS ACQU " 0 oOOO_R OFFS ET
F 25 S E X T A N T0 s' c_ ----
I
ATLOS
S J TRUNDR IVE RJ sEWL J 28V00CPS 1_ .
C T _._ AS J .,-._ .._ p ..
I LOS I IFTJ' _ _ ASO S HAFTDRIVE S LOS
J L-- . J r - -- --.C MC N 'As
2 8 V80 0_ /
- "-I- I D,A ND II CONVER'_R II I
ERROR READ JOUNTER COUNTER
II c0°
3 4
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 39/148
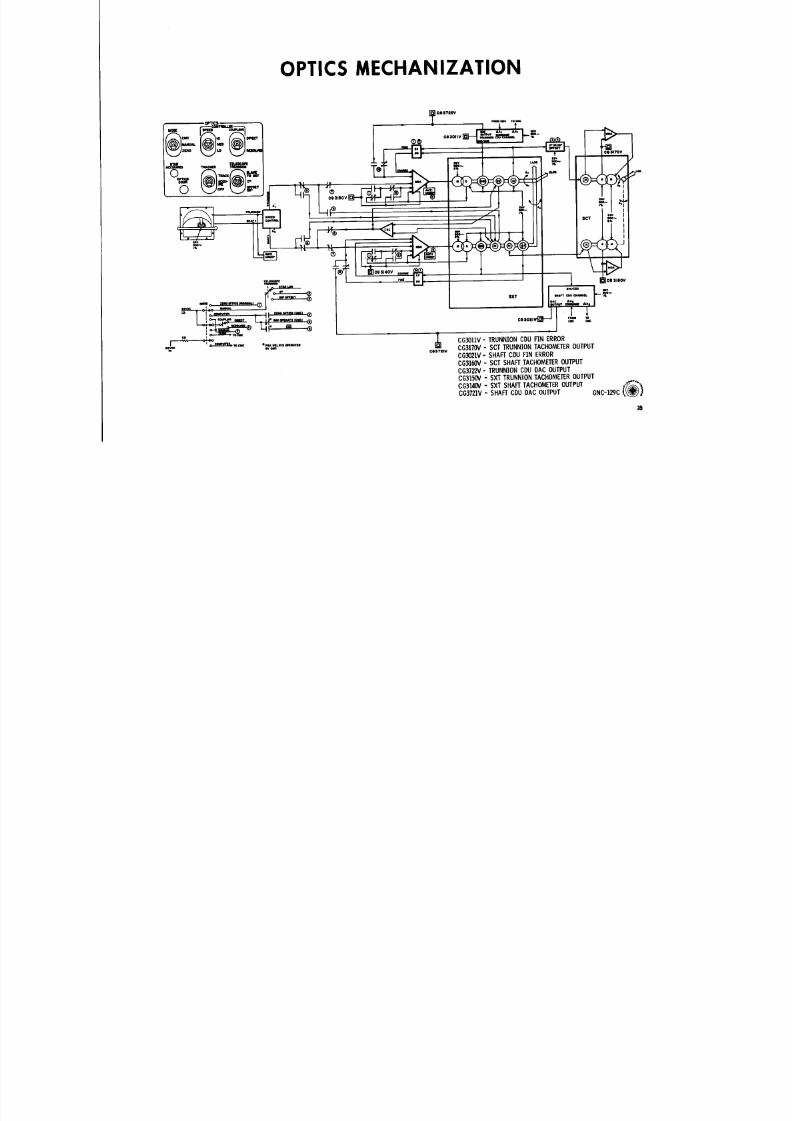
OPTICS M ECHANIZATION
I 'lce 314ov
co 3Igor
_": ° [r......k,--A¢TP UV _ AAI
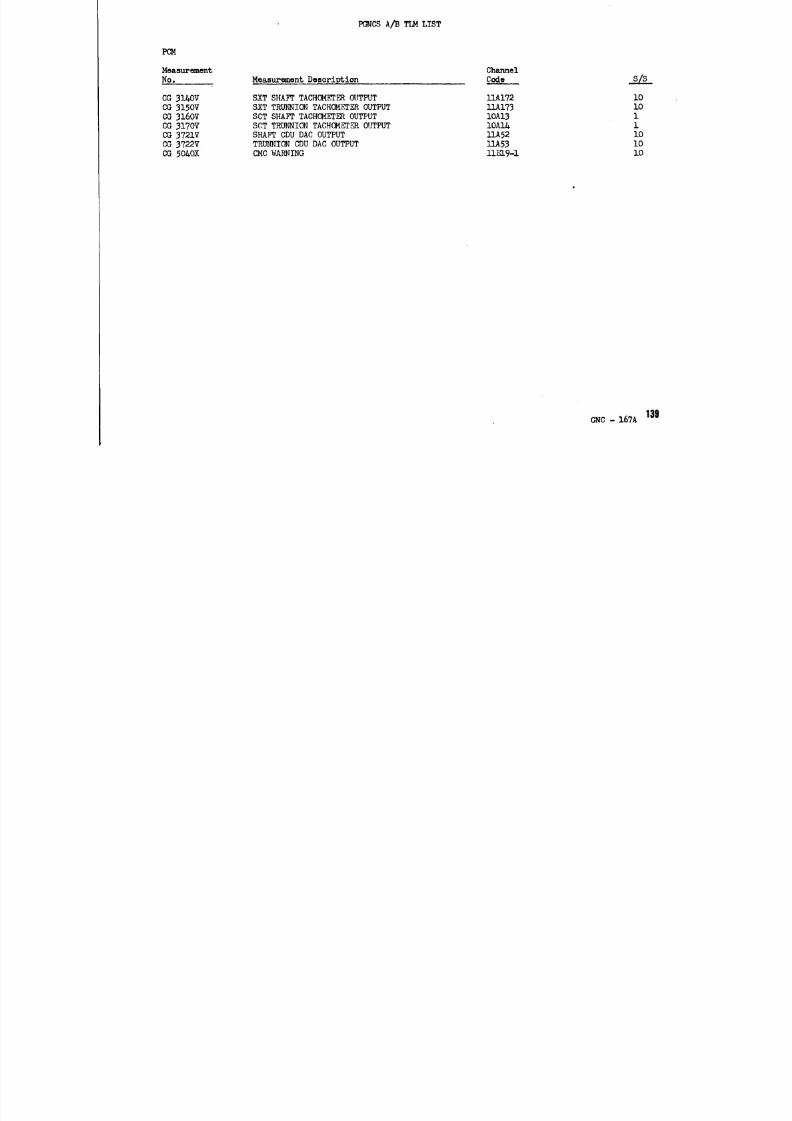
_U,./, •- " "d'_ ° _.,,. , _,_ ,., ,,..,.,_ ,,_,,,_. CG3O I IV" TRUNNIONCDU FINE RROR
"'_ ""_ CG3 II 0V" SCT TRUNNIONTACHO METEROUTPU Tel TIIVCG_ 0 21 V- S HAFT CDU FI N ERROR
CG,160 V - , CT S HAFT TACHOMETER OUTPUT
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 40/148
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 41/148
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 42/148
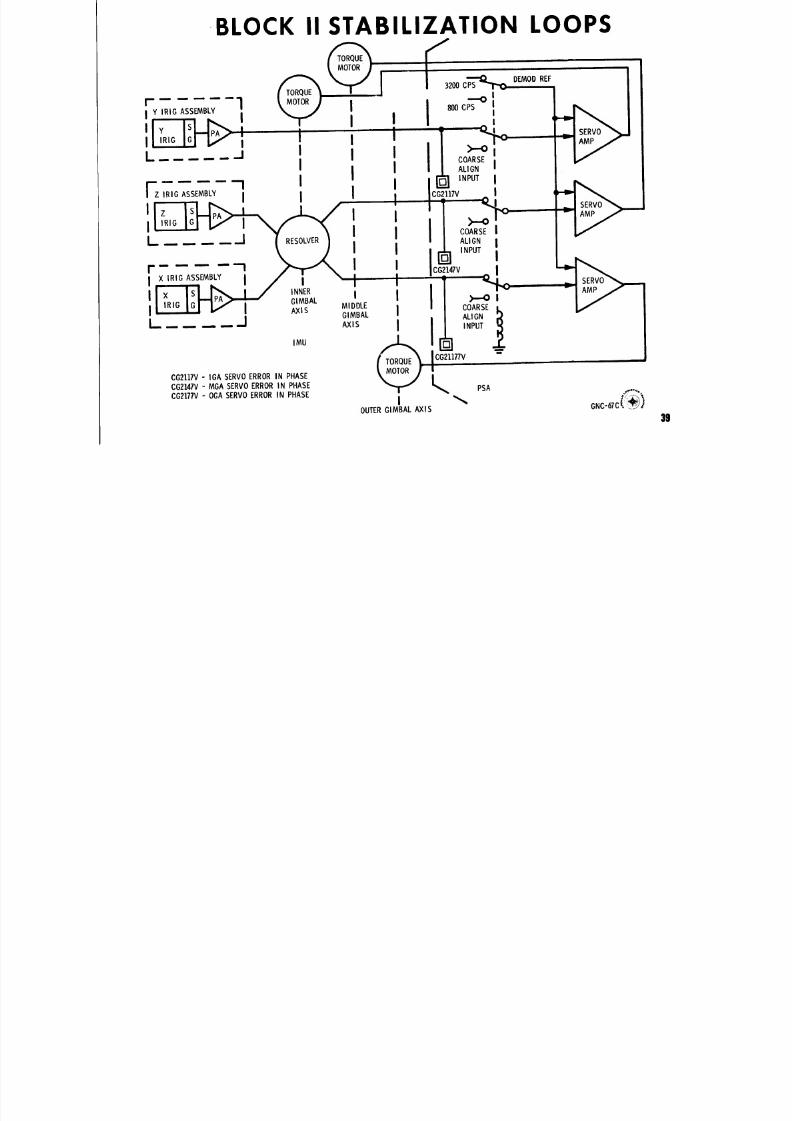
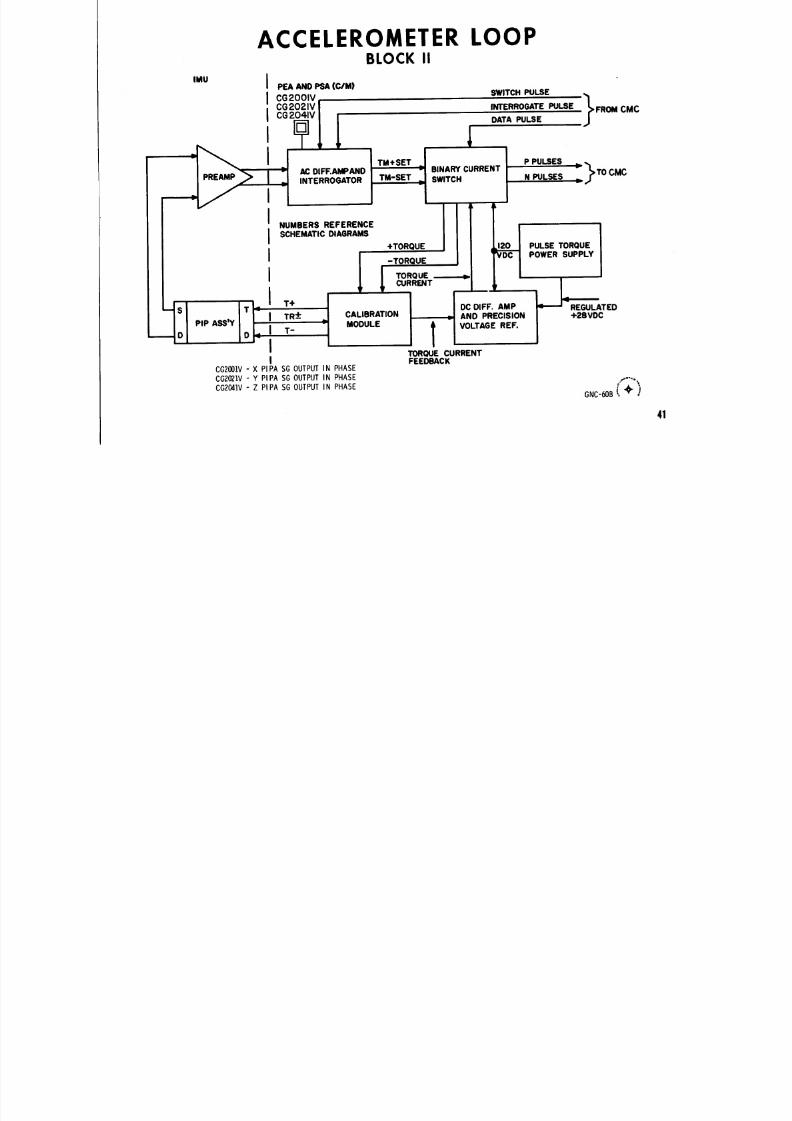
B LOC K II STAB ILIZATION LOOPS
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 43/148
TORQUEMOTOR
DEMODREFTORQ UE 3200 CPS
r- .... -.--0 I
iiYIRIGSSEMBLY-'11 MOTOR Ii I J 800PSIII I I SERVO
II I II I >'°lOARSEL- -- -- -- - ..I
ALIGN I
.... -I I I INPUT
_Z IRIG AS SEMBLY J j j I IG211 /V II
I I Ii i _L ..J RESO LVER I COARS E... ALlGN
I I I INPUT I.... --i I I cG214 7v II X IRIGSSE MBLY I I I -
' 111iMBAL )--'4) II I AXIS MI DLE / COARS E I,,
.... AXIS I
IMU _____ v ICG211 77 . ,CG2117V I GA S ERVOER RORIN PHASE /
CG21 47V MGAS ERVOERR ORN PHASE PSACG21 77V OGASERVOERRORN PHASE
I _ GNC __,c(,,_)UTERGIMBALAXIS3 9
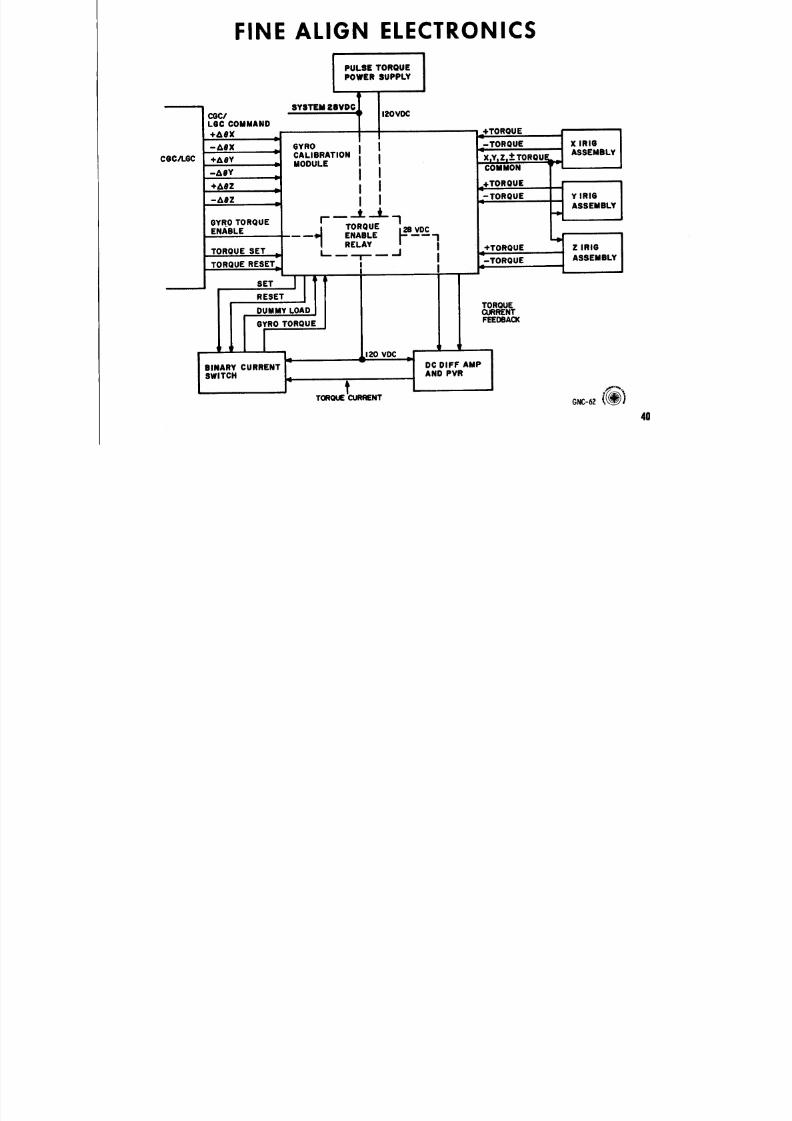
FINE ALIGN ELEC TRONIC S
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 44/148
J PULSE TORQUE
POWER SUPPLY 1
SYSTEM 28VDg I I2OVOC
CGC / !
LGC COMMAND+Aex us-AeX _; GYRO PUE X IRIS
+.AeZ _ I-TORQUE-A.Z , -TORQUE YIRIG
GYRO TOR QUE i- TORQUEEN,(BLE -- --fl ENABLE _ -
/ RELAY- +TORQUE ZIRISTOR QUE S ET i__ .-J [ ASSEMBLYTORQUE RESETS ] ; F_-TORQUE
SE T-'I It i: ,
iI ouM.YOAD/ TORQOEURRENT
11 1O, =U,BINARY CURRENT r v Dc DIFF AMPSWITCH ANDPVR
t
4 0

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 45/148
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 46/148
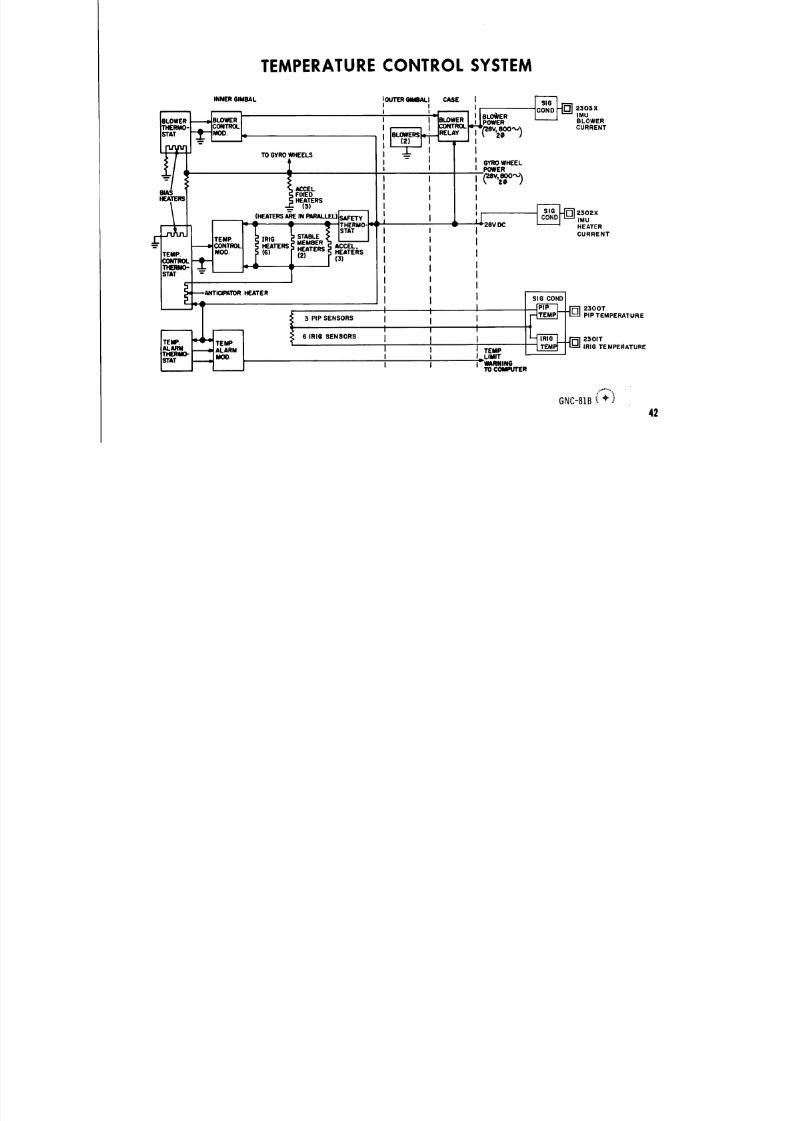
TEM P ERATURE C ONTROL SY STEM
INNER GIMBAL IOU_t.NC_kQALi CASE I
I I IC(_D _ 2303 XI -IBLO_ _n. | I IPOWE R BLOWER
,mR . ,_ _F , _.,¢ oo ..0 C URREN.TOGYROWHEELS _ I I
: G YROW HEELI POW ER
e ,As I IHEATEm S I I
l I _ 2302Xr T T _, _.o f. ' ,!_.w ,.uEATE RI
ST ABLETEMP. IRIG I l CURRENT
---_. __ ,00 ._"_-- L 'l_ (¢)- Ir_" .... ii _IAATERS Illl I
--ANTICIPATOR HE ATER II sis COND
P IP TEMP ERATUR E3 PIPSENSORS I
T
6 IRlll SENSOR S I .._ 230,TRISE_.E"A TURETEMPI _LIMITI - WARNING
TO COllPt ffER
G N C - 8 1 B( + )42
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 47/148
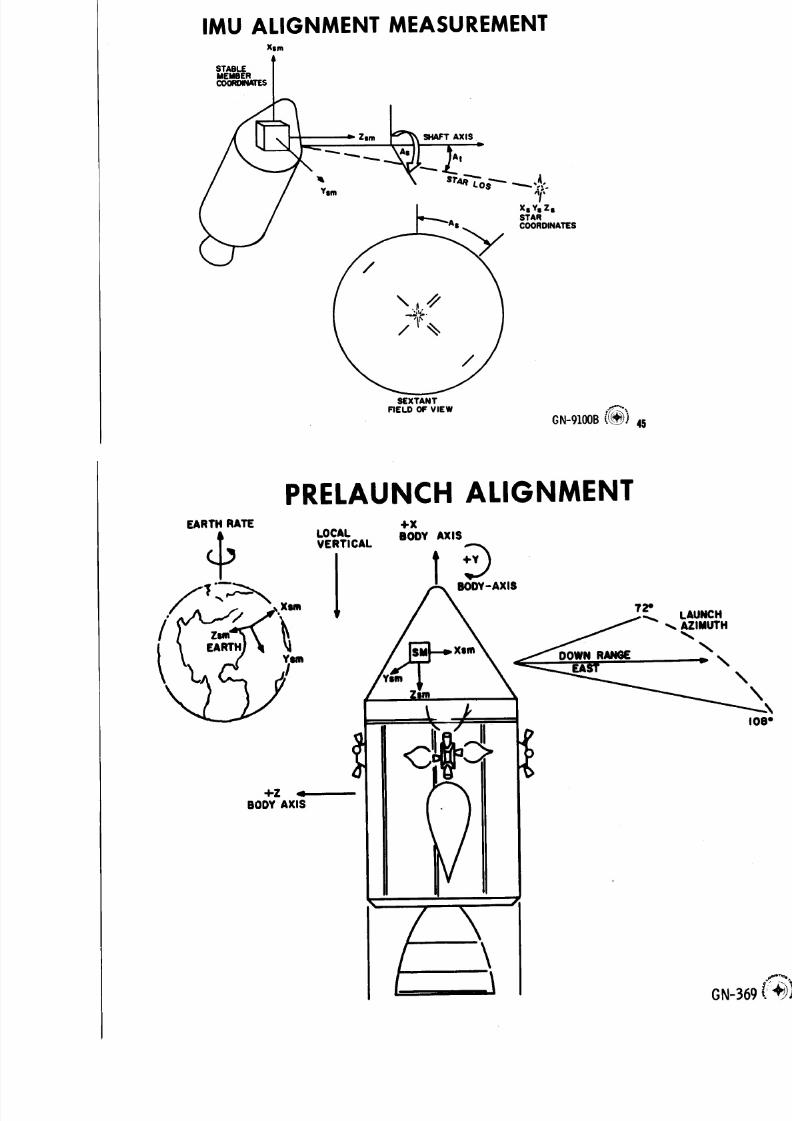
REFERENC E C O ORDINATE SY STEM S
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 48/148
Zl _oje
GREE NWICH _ _--_" '_MERIDIAN , _ "_
( I_ ' IATOR
GEOCENTRICA RTESIAN GEODETI COLARROTATIG
• INERTIALFIXED I L - LONGITUDEI
I _.- LATITUDEI r - EARTHRADIUSVECTORI
f
I" 8
Ir
LJ ATOR
- RIGHTASCENSIONANGLE(_- DECLINATIONANGLE GEOCENT RICOLAR
r - POSITI ONVECTOR IN ERTIALFIXED (,_)GNC-185 44
IMU ALIGNMENT MEASUR EMENTXsm
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 49/148
STABLEM E M B E RC O O R D I N AT E S
Zsm AXIS.
Ysm ;1[,Xs Y s Z sSTARCOORDINATES
SEXTANTFIELD OF VIEW _'_"_'_
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 50/148
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 51/148
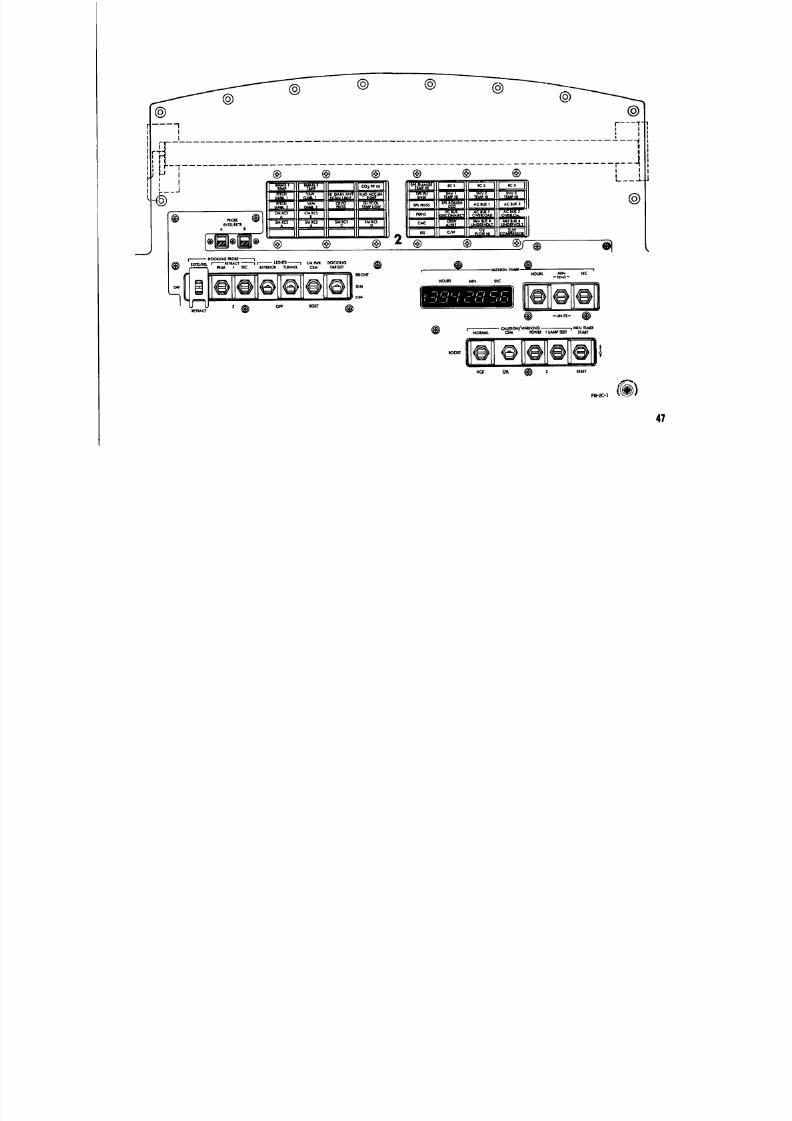
4 7
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 52/148
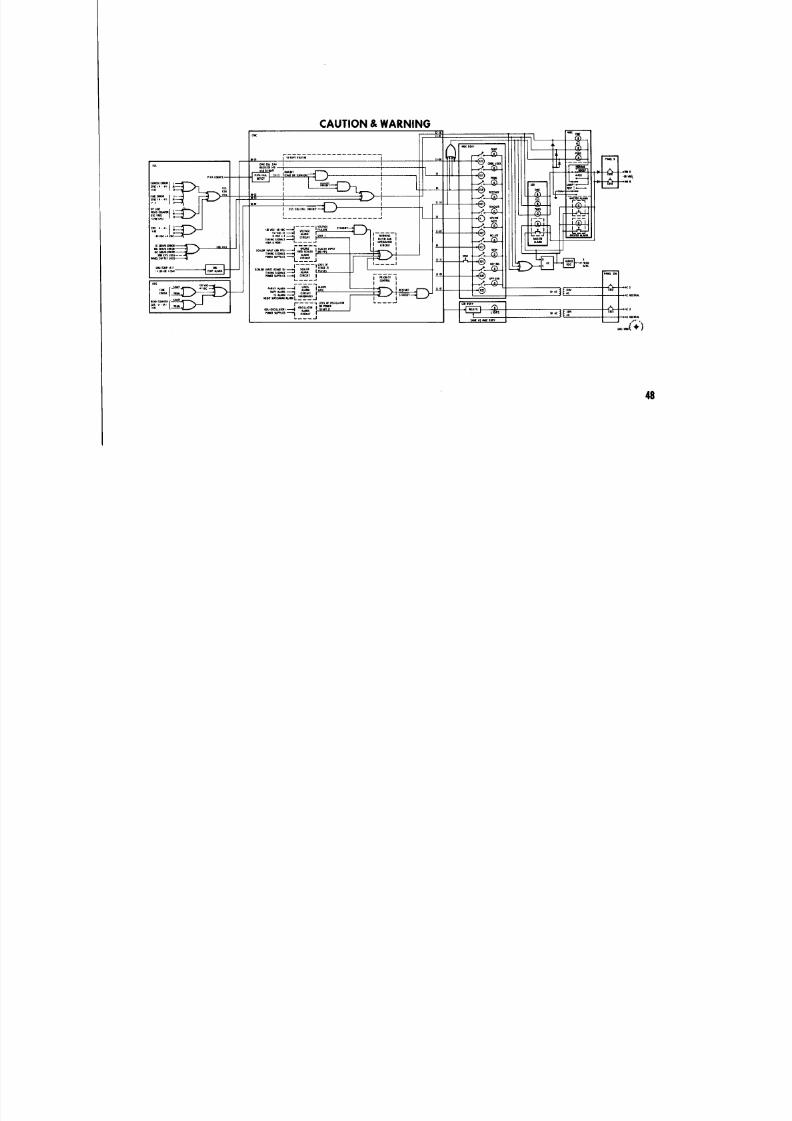
8
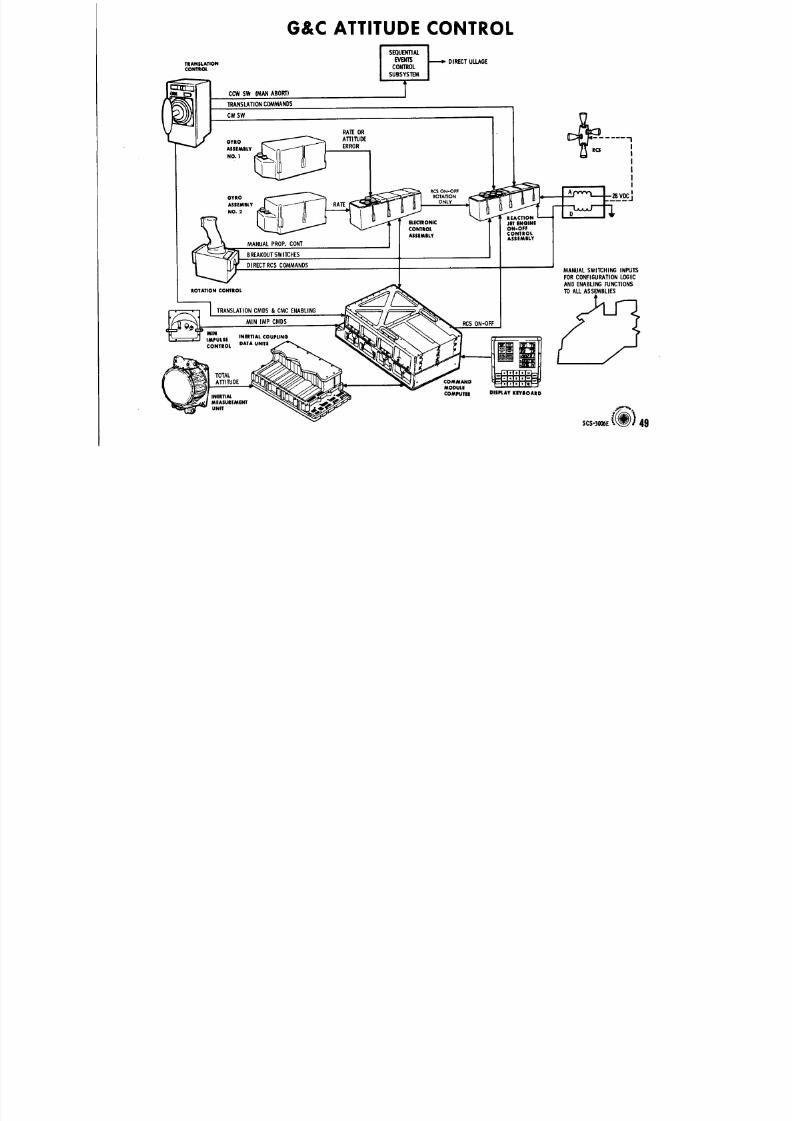
G &C ATTITUDE C ONTROL
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 53/148
Is- _*RANSLATION E_ ENTS J : DIREC TULLAGE
comto L CONTROLSUBSYST EM
I_'_ CCWSW (MANABOR T)
J CWSW
R A 1 1 [ O R
oYto _ ATTI11JDE
OYRO _ ROTATION
ASSEMBLY ONLY IINO. 2
REACTON
,I ELECTRONIC JET ENGINECONTROL ON-OFFASSEMBLY CONTROL
MANUALPROP.CONT ASSEMBLY
8REAK OUTWITCHES
DIRECTRCSCOMMANOSMANUAL SWITCHING INPUTSFOR CONFIGURATION LOGIC
ROTATION ONTROL _ _ ANDENABLINGUNCTIONS
MIN IMP CMI)S - " _ RCS0N- 0FF
_L__ 9iNIMPULSE
CONTROL DATA UNITS
' TOTALATTI_DE
INERTIAL DISPLAY K|YIOARDMEASUREMENTUNIT
SCS"_ EC_) 4'
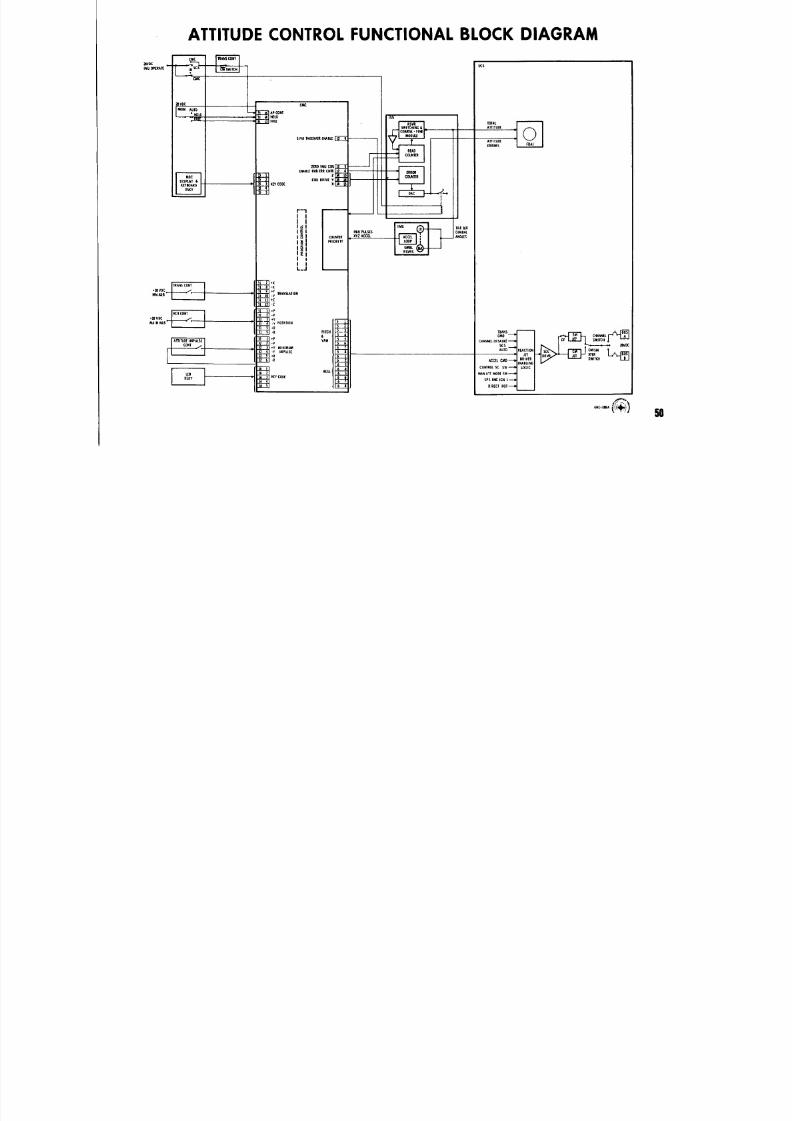
ATTITUDE C ONTROL FUNC TIONAL B LOC K DIAG RAM
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 54/148
CM_VDC _
'/OC C MCMOO(AU TO
APCO UT• HOLO HOLD
FR [_
SWI TC H IN G & L _ AT TITLID[
ATTI TUDE
I HisP_,l ] Cou° ,,_,,_YBOARD KEYCODE
os.I -I _: .
[-1 kI_,1I _ I LCOe
I e_Bt
I I! IL-J
II_ANSCONT 1 I--
MNk&8 J ;y TRANSLAIION
IROTCONTROTCONT -- .p+_ VDC I _"
]MAINA&Be-- l_" __ ' R L _
-R IECH _ _ CMU ---e CHANNEL _'_
ATIITUO(MPULSE/I _ YAW ) _ C HANN ELISABLEC ON ' _ /. ; MINIMUM 2 SCuTSo--RE IO' UMISM
j -Y IMPULSe _ I_*R 6 I AjC[T I
*R I_ Z ACCELC,MU-- ORVEl _ _ SWITCH6 I [HABLINC
LEg RO LE 6 5 MANkTTta OUFSWDSIY -'- KEYCODE 6 6
6 T SPSE HOUMl--"_6 I DIRECTROI-- _
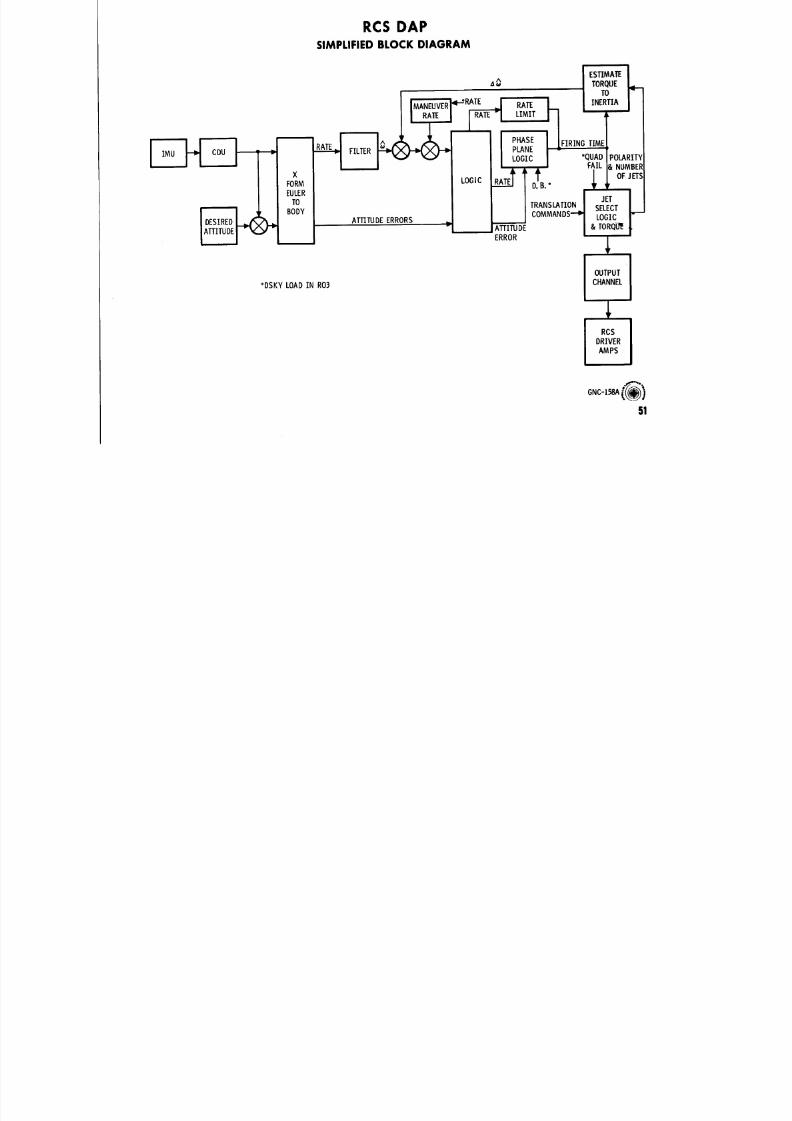
RC S DAPSIMPLIFIE D BLOCK DIAGRAM
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 55/148
I ESTI MATE
a _ TORQUETO
JMANEUVERJe l-_R_ RATE I INERTIA
FAIL8,NUMBERX f _ _ OFJETSORM LOGIC RATE D.B.*
EULER t J ET 1.
TO TR ANSLA TION SELECT
I _ BODY COMMAN DS -.._ LOGIC
DESIRED AT T ITU DEE RRORS
IAT TITU D ATTITU DE & TORQ_ERROR
OUTPUT
*D SKY LOAD IN R0 3 CHANNEL
R CSDRIVERAMPS
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 56/148
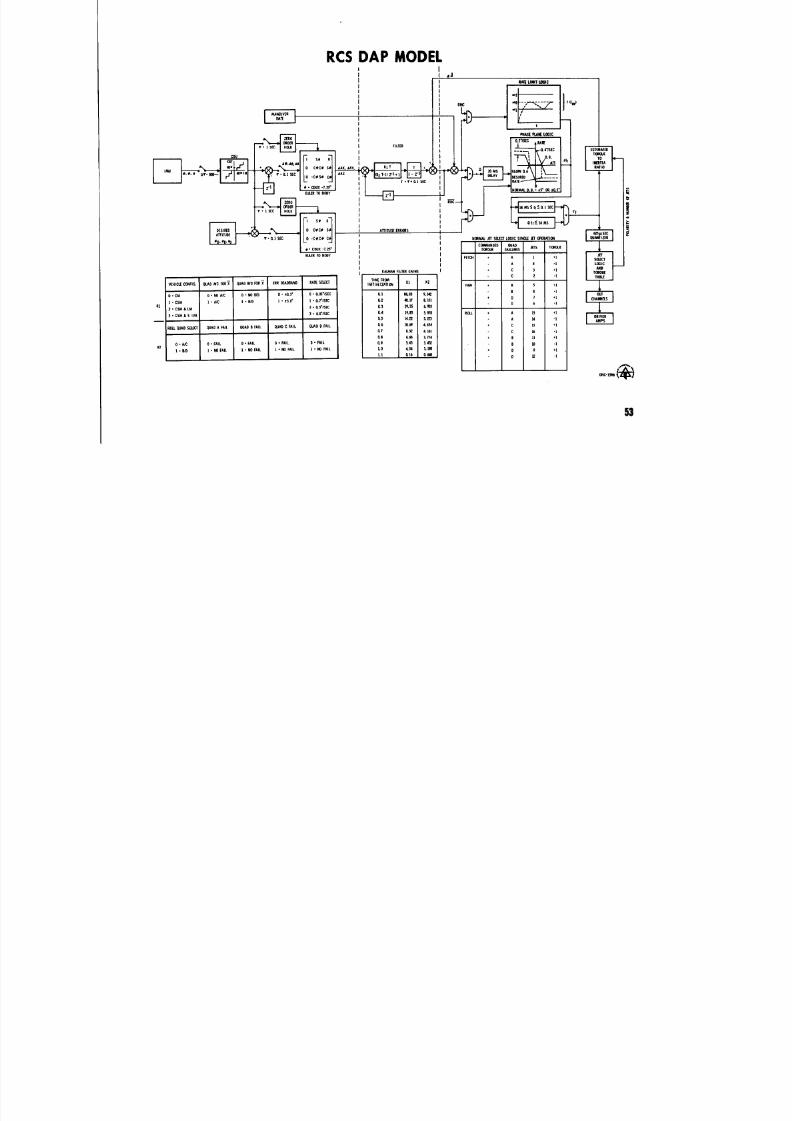
RCSDAP MOD EL
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 57/148
lATE LIMITLOGIC
,1¢ "O --,;_'_<'-- ' 0.n'
_4A5£ M_NEL_I C
FILTER
CD USO
C_C#
-C+SOT.f-GISEC
- COUX7.2 5°EULERO gOOY _i
M MS_ tr iG| SFC
0t f_[ LEMSt
COC_ AETI11JEERRORS
• - 0.1 _ C -C0C¢'
0.. COU X1.2_EUL£RTO 800Y
A -|
KALMANLLI_ GAINS C +1
TIMEFROM K| K2VEHI CLECONF IG. _J AD NC FORX QU AO"0 FORERRD[ADBANO RATES[L[ CT INITIALIZATIOR
0. CM 0 • NO k/C 0 - NO BiD 0 - _ _° 0 - O.05 ° SEC O. 8¢13 9. _
• CSM I " AIC l " BID | - :tS.0_ l • 0 . _ ° SEC 0.2 48.IT &lSl
R| 2 • CSM &LM 2 • 0. 5° SEC 0.3 _.55 6._3• CSM & S IVB 3 • 4.O°SEC 0.4 |9.E5 5.910
0.$ 1 4._ 5.22 )
FIOLLQUADSELECT QLIADA F AIL QUA0B F AIL QU ADC FAIL QUAD0 FAIL 0.6 10.69 4. 4534 130.7 8.32 4.161 C 16 "10.$ 6.66 ) . F74 B II + l
R2 0 " NC 0 " F AIL O . FAIL 0 " FAIL 0 * FAIL 0.9 S.45 3.4 _ B 10 -I| • BID I " NOFAIL I • NO FAIL I " NOFAIL I • NO FAIL LO 0._ 4 1. l JO O 9 +1
LI 0.16 0.640 D 12 - !
5 3
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 58/148
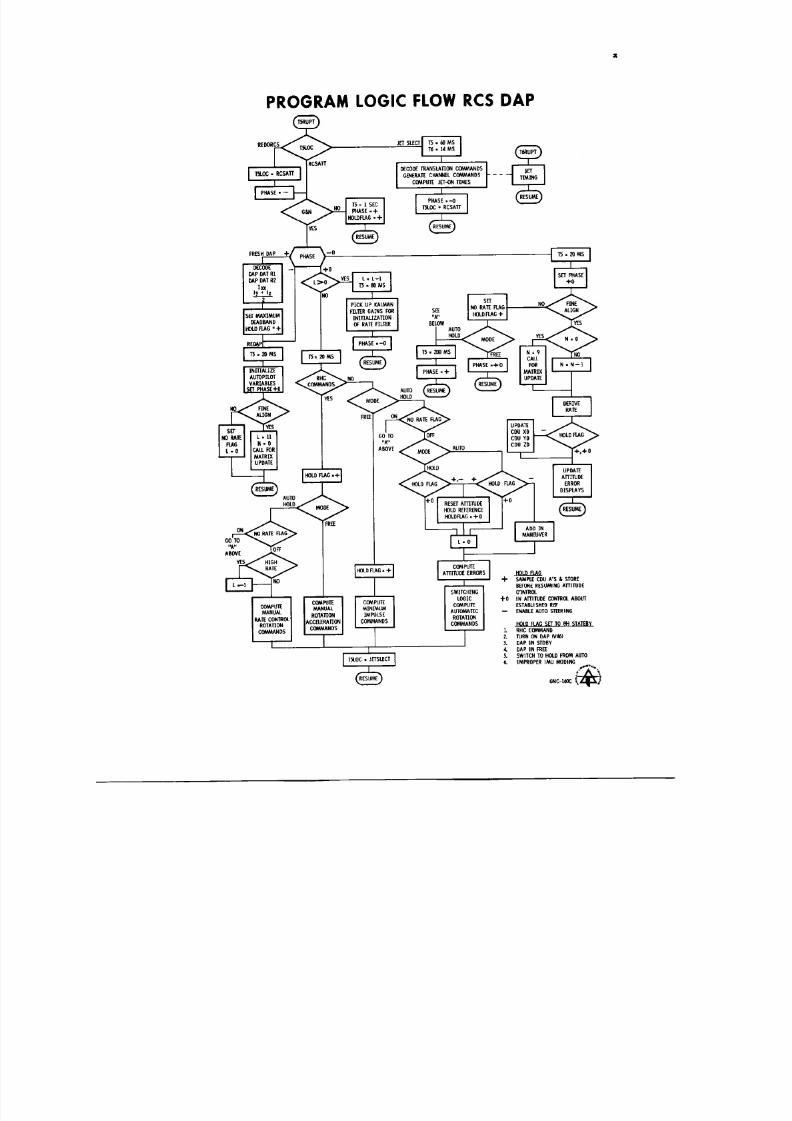
PROGRAM LOGIC FLOW RCS DAP
FRESHDA P
PIC K UP KALMANF I LI I RGAIN S FOR
I NIT I ALI ZAT I ONOF RAE F I LTER
A U TO
H O L D
GO TO"A "
ABOVE
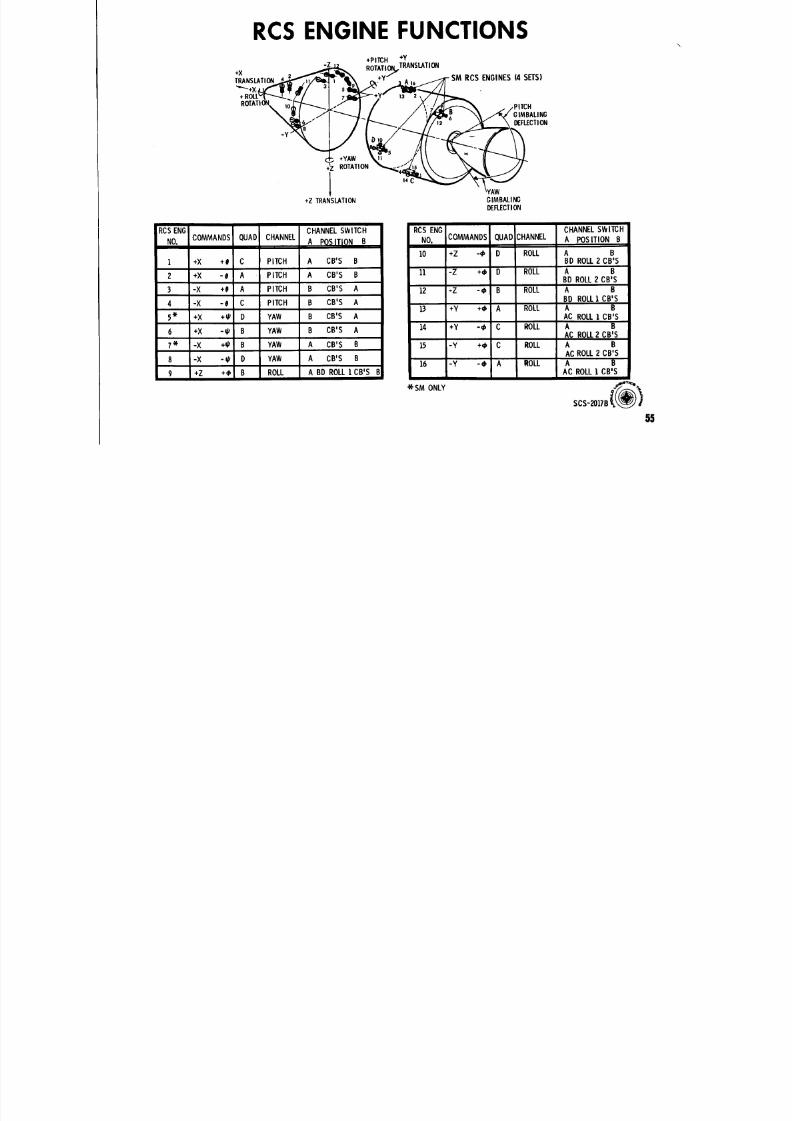
RC S ENG INE FUNC TIONS+ P IT CH + Y
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 59/148
ROTATI O_RANSLATI ON
TRXANsLAT, ON_ ___ +Y_ AI__SM RCS ENG,NES4 SETS,'-+x_._ W_ ,i+ROLL__'_.. _""-,_/w +Y "
ROTATIO No_ _L-"_"_'-? " ,3-_ //PITCH
"I\ ([
•Z ROTATION_-4__.,_ _,_/
+Z TRANSLAT ION G IMBALINGDEFLECTIN
RCSE NGI CHANNELSWITCH RCSE NG CHANNELSWITCH
NO. COMM ANDS QUAD CHANNEL A pOSITiON B NO. COMM ANDS QUADCHANNEL A POSITION B10 +Z -4, D ROLL A B
1 +X +it C PITCH A CB'S B BD ROLL 2 CB'S
2 +X -It A PITCH A CB'S B 11 -Z +4, D ROLL A BBDROLL2 CB'S3 -X +0 A PITCH B CB'S A 12 -Z -4, B ROLL A B
4 -X -It C PITCH B CB'S A BD ROLL1CB'S13 +Y + 4, A ROLL A B
5" _ +X +¢1 D YAW B CB 'S A AC ROLL1 CB'SB
6 +X -V_ B YAW B CB 'S A 14 +Y -4, C ROLL AAcROLL2CB'S7.x- -X + 4 B YAW A CB'S B 1 5 -Y +4, C ROLL A B
ACROLL2 CB'S8 -X -4 D YAW A CB'S B '16 -Y -4, A ROLL A B9 +Z +4, B RO LL A BD RO LLICB'S B A C ROLL'1 CB'S
•X-SM ONLY ,,"_/"%'-
5 5
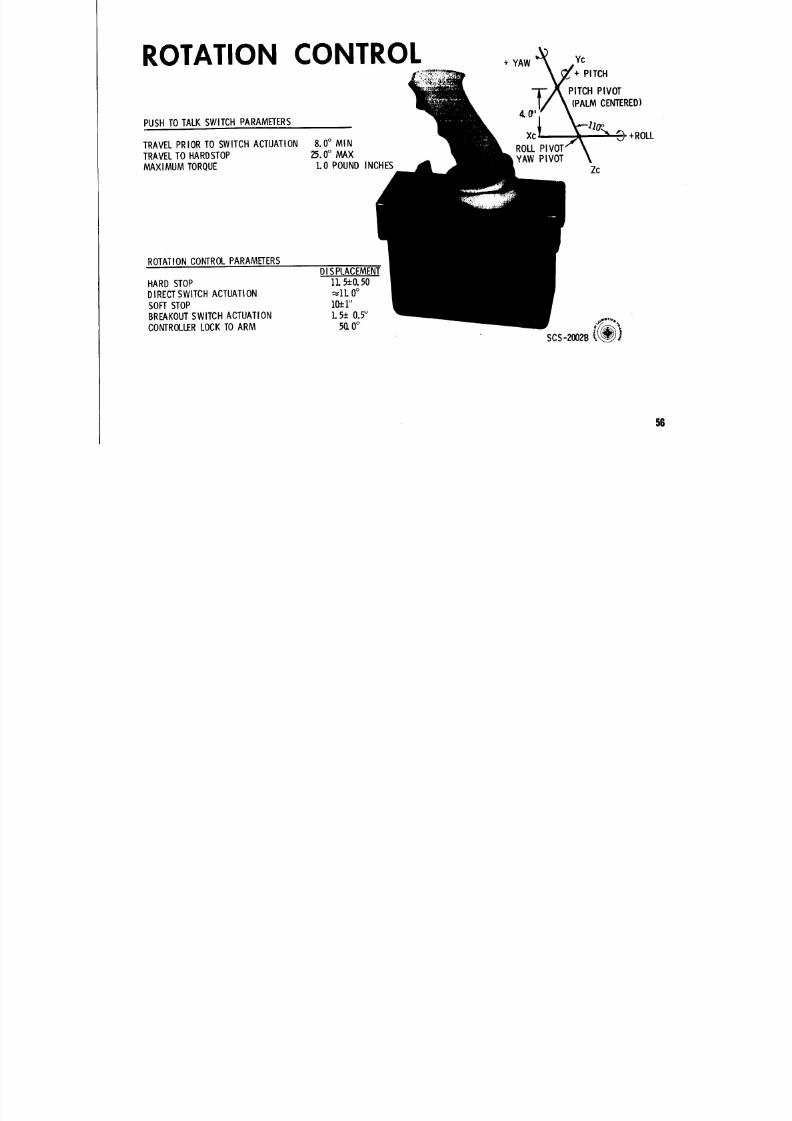
ROTATIONCONTROL
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 60/148
+ YAW _'+ PITCH
ROTATIONCONTROLT /# _k P I TCH P I VOT
PUSHTOTALKSWITCHPARAMETERS 4" 0"1/ _'(_PALM
CENTERED)
_'- llo °'x"_"+ROLLTRAVELPRIORTO SWITCHACTUATI ON 8.0° MIN Xc ,TRAV ELTOHAR OS TOP ? .5.0° MAX ROLLPIVOT /_ _ JMAXIMUMTORQUE 1.0 POUN DINCHES YAW PIVOT_
Z C
RO TATIONCON TROLARAMETERSDIS PLACE NIEN;
HARDS TOP 11 .5 ±0. 5 0DIRECTSWITCHACTUATION _11 . 0°SOFTSTOP lO.-J:oBREAKOUTSWI TCH ACTUATION 1.5+ 0.5°
CONTROLLERLO CK TO ARM 50.O° _"°_sc_-_o o__)
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 61/148
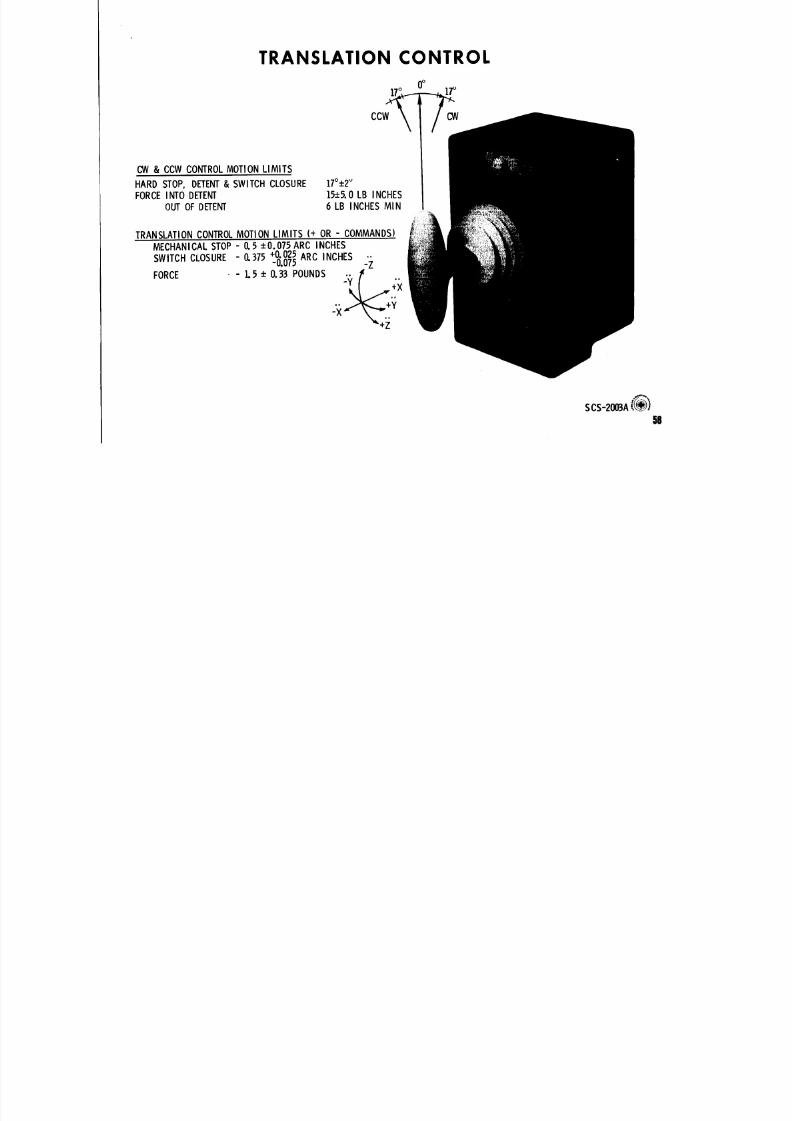
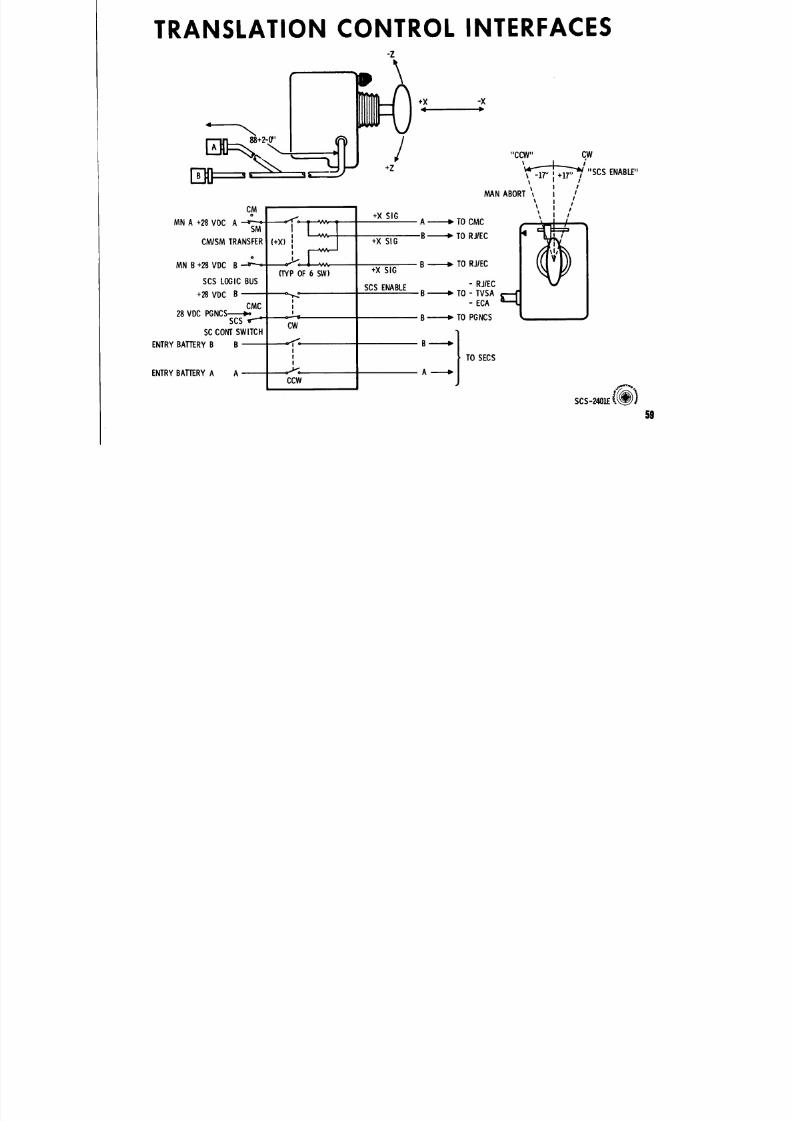
TRANSLATION C ONTROL
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 62/148
0
1T'
CCW CW
C W & CC W C O N T R O LM O T IO N L IM IT S
HARDST OP,DE TENT SWITCHCLOSURE 17°+2,FORCENTODETENT 15:1: 5.LB INCHES
OUTOFDETENT 6 LB INCHESMIN
TRANSL ATIONONTROLOTIONLIMITS (+ OR- COMMANDS)MECHANICALTOP- 0. 5 ±0.075 ARC INCHESSWITCHCLOSURE 0.37 5 +0.0 25ARCINCHES ..-0.075 -ZFORCE - - L 5 + 0 .33 POUNDS ... f
TRANSLATION C ONTROL INTERFAC ES- Z
\

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 63/148
\
+X -X
"CCW " CW-_lT_ i+17_ "S CS ENABLE"I I
MANABORT _ I iIk I I
CM _ t° + X SIO I I
MNA +28VOC A _CMISMTRANSFER+X) +X SIG B _ TORJ IEC
MN B+28 VDC B _ - - - B _ TORJ /EC(TYPOF6 SW) +XSIG
SCSLOGICBUS SCSENABLE - RJ IEC+28V0C B _ B _ TO - TVSA¢ "--fl J
CMC " - ECA "-%__._ j8 VDCPGNCS. _-I_SCS _ _ B _ TOPGNCSC W
SC CONTSWITCHENTRYBATTERY B _ B
I
v TOSECSn
ENTRYBATTERY A _ ACCW
,p_f T'eOA
_cs-_ ,,o _(_ )5 9
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 64/148
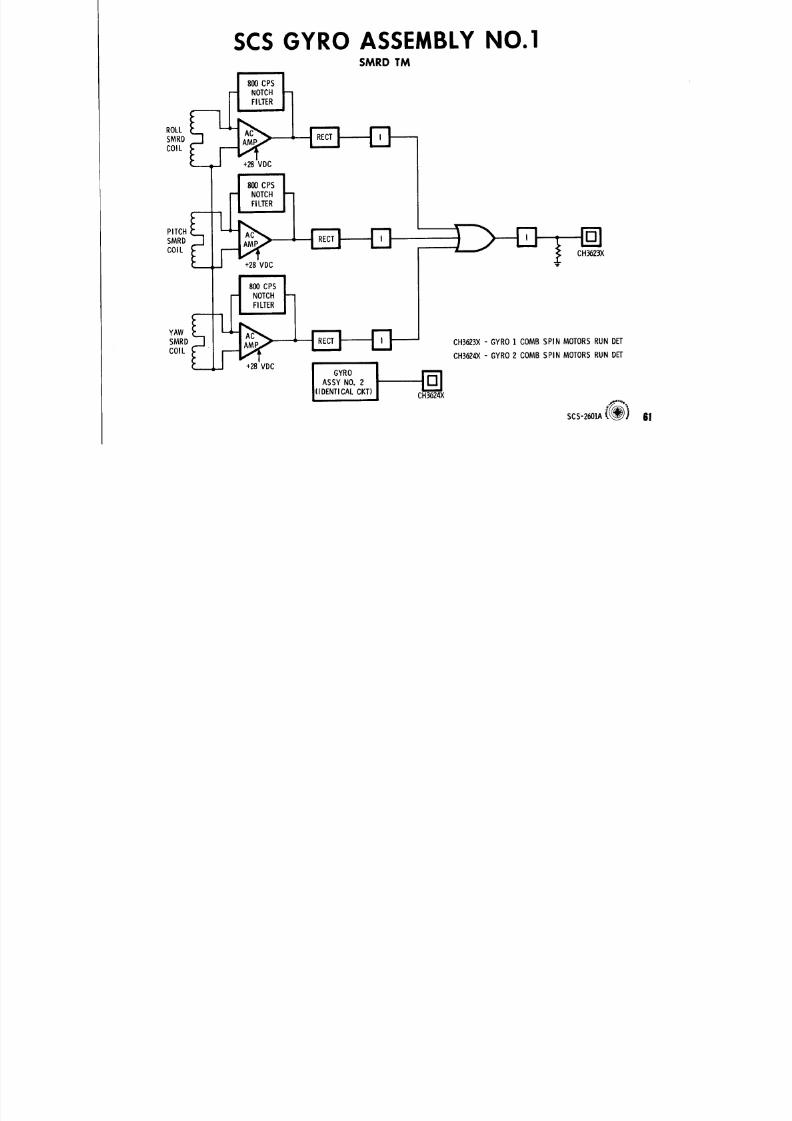
SC S G Y RO ASSEM B LY NO.1SMRD T M
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 65/148
J 800 CPS
NOTCH
SMRDCOIL
A
800 CPS" 1 N O T C H
_ | F ILTER
SMRD
COIL _ CH3623X28 VDC
I 800 CP S'1 N O T C H
I FILTER
SMRD CH3623 X- GYRO1 COMBSPI N MOTORSRUN DET
COIL F F C H3624X-GYRO2COMBSPI NMOTORS RU NDET_ +28 VO C I GYRO j
I ASSY NO. 2 iI _III(IDEN TICALKT)I CH3624X
scs-_6 o_(,_1 sl
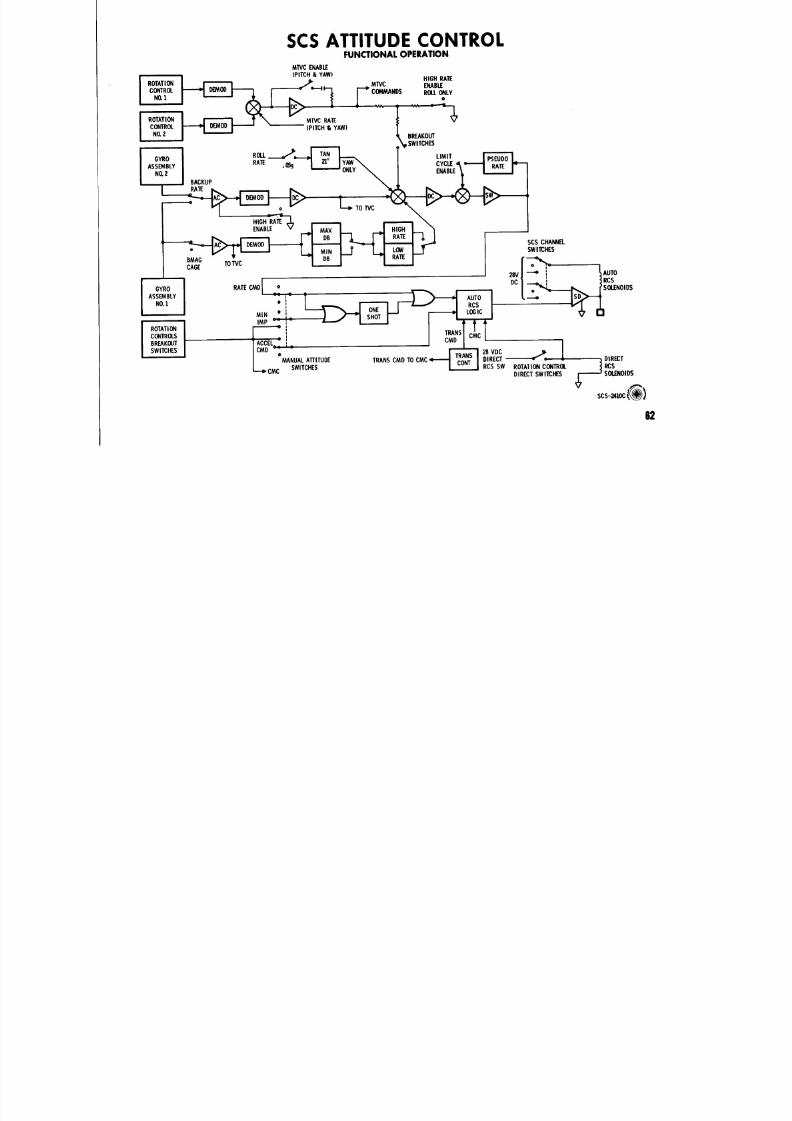
SC S ATTITUDE C ONTROLFUN CT IO N A L O P ER AT IO N
M T V C E N A BL E( P IT CH & YAW)
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 66/148
( P IT CH & YAW)
ROTATION MTVC ENABLECONTROL COMMANDSROLLNLY
N O . 1
CONTROL (PITCHI_ YAWl ¢NO. BREAKOUT
_11 SWITCHES
ROLL __ LIMIT
RATE .05g CYCLE _ --ENABLE "
BACKUPR A I £
--'_- _ i , TOvcHIGHRA_'_'I_ENABLE v
SCS CHANNEL• SWTCES
CAGE T OTVC /28VJ I _ 1AUTO
GYRO RATEMD o OLENOIDS
NO.I ° i _--.,_ I--'_ '-1 I _ I RCS I
j IMP --
ROTATION ,oCONTROLS J TRANS CMC I
BREAKOUT T ACCEL _" CMD J -- t ._ j
SWITCHES jcMo :3 ,I,_,_ I 28VDC
MANUALA'I'rlTUDE TRANSCMDTOCMC• I ' ;,_;;: r" I DIRECT e '- = _ DIRECT
L.._CM C SWITCHES I .... I RCSSW ROTATIONCONTROL _ RCSSOLENOIDS
DIRECTSWITCH ES
6 2
SCS ATTITUDE CONTROLPITCH CH A NN EL
ACI _ 31MTVC RAT E ENABLE
4 0 0 C P S
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 67/148
4 0 0 C P S3KI =RAT EI t IGN2 •[(SOS•AUTO • CW)+
(SCS • RAT E CMD) + (CMC • RATECMD • CW)]ROTATION
3K2=(RATE2+A TTI/RATE2) •ION2 • |(RC S •AUTO• CW)+CONTROLO. (CMC RATE MO ON)]
MTVCAC2 ANDS400CPS
ROTATI N )Q S30
IGN2 e{ (SCS +ON), _QS_ P-B .O. I400 CPS (RATE CMO +ACCEL C /v_DI
ACl + (SCS • AUT O * C W)J + P-B.O. 23K! 3K?
mT
.= 3K2i DEMOD ISWTCH (+)SDGYRO 3 QS29 IS(NO)
ASSEMB LY IMPULSE2 DEMOD ISWTCH G EN
RATE2 _Q S_8DIS(NO)+ RAT E 2
[HIGHRATE "r'-_QS28 _NAB LE + IGN 2] AC2 "=" IMP
(RATE I) _$25 400 C P S
GYRo _ 3QS44IMITCYCLE
ASSEMB LY OFF1 3QS 2]
I' (ATT I/RATE 2 • OSg)•
[IGN 2 + RATECMD • 400 CPS T VC 2K1 = r(_) •(e-B-'_--.-.-.-.-.-._)] ACl HIGH ,_
RATE
ENABLE _rTVC I"I NO.I (-)INTEGRATOR I
I ROT ATIONNO.2(-)C O N T R O LI BREAKOUTNO.! (* )I I ',,,_
I 9N I TCHES NO. 2 "--I-_ I_+) Il +J
L rv63
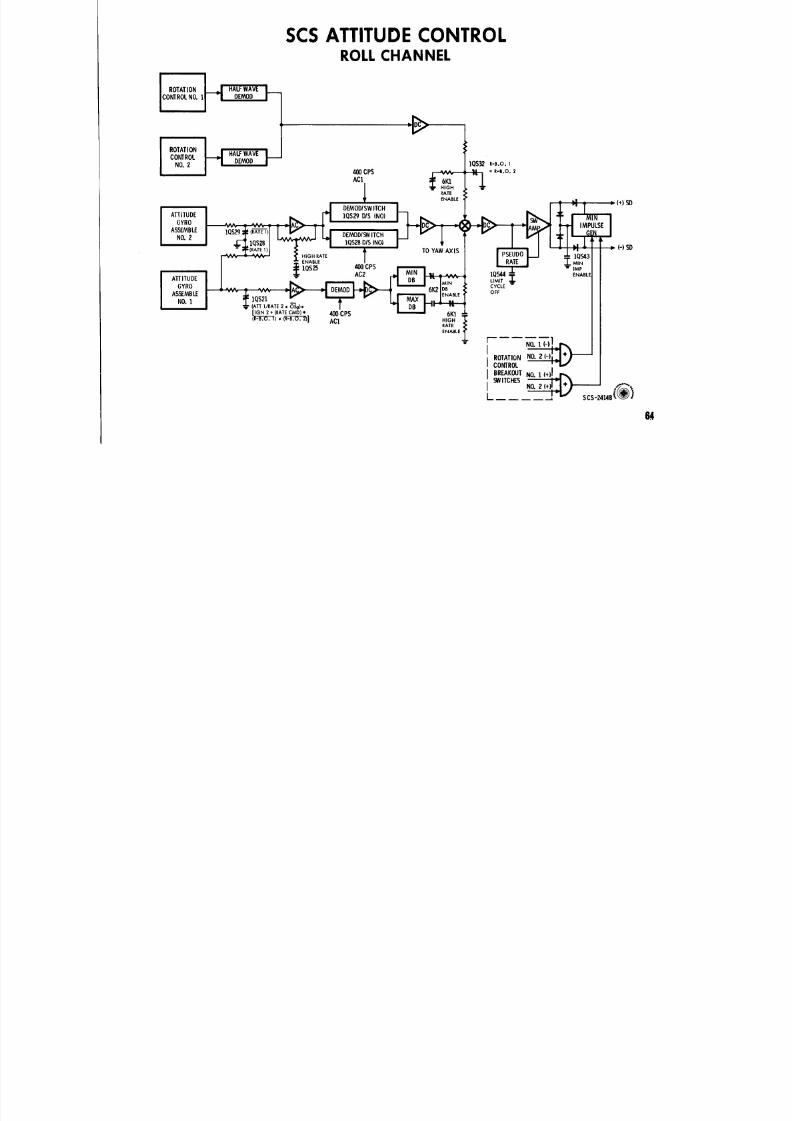
SC S ATTITUDE C O NTROLR O L L CH A N N EL
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 68/148
I ROTMIONONTR OLo. , HAWo'V E--
CONTROL HALFWAVENO. 2 DEMOD i QS_ R-B . O.
4 0 0CPS + R- B. O.ACl
RAT E
ENABLE [+)SDDEMOD/SWTCH
ATTITUDE IQS 29DIS(NO)GYRO IMPULSE
ASSEMBL E I QS2 9 DEMODISWTCHNO.2 1 QS28DI S(NO )
TOYAWAXI S (-) DH iGH R AT E
ENABLE "_ I
_.IQ S2 5 4 0 0CPS . , e MPC2 1QS44 I" ENABLEAT T I T U D EI LMT
GYRO CYCLEASSEMBLE OFF
NO. I 1Q S2 1"m' (ATT I/RATE 2 • O-59),
[IGN 2 +(RATECMD) • 400 CPS 6KI --
(R-B.O. I) • (_] ACt HIGH ._RATE
ENABLE, _
NO.-._.__@OTATI ONNO.2 1-)CONTROL I vL
BREAKOUTO.I_ 2( __A/ITCHESNO (,,"_)_ .--t SCS- 2414B
6,4
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 69/148
¢
,9
"
"
°+TT
0
_
,+
+
N
_
m
m
<
'
+
+
<
t_
+
+
_+
+
¢,
_m
N_
0
0
i
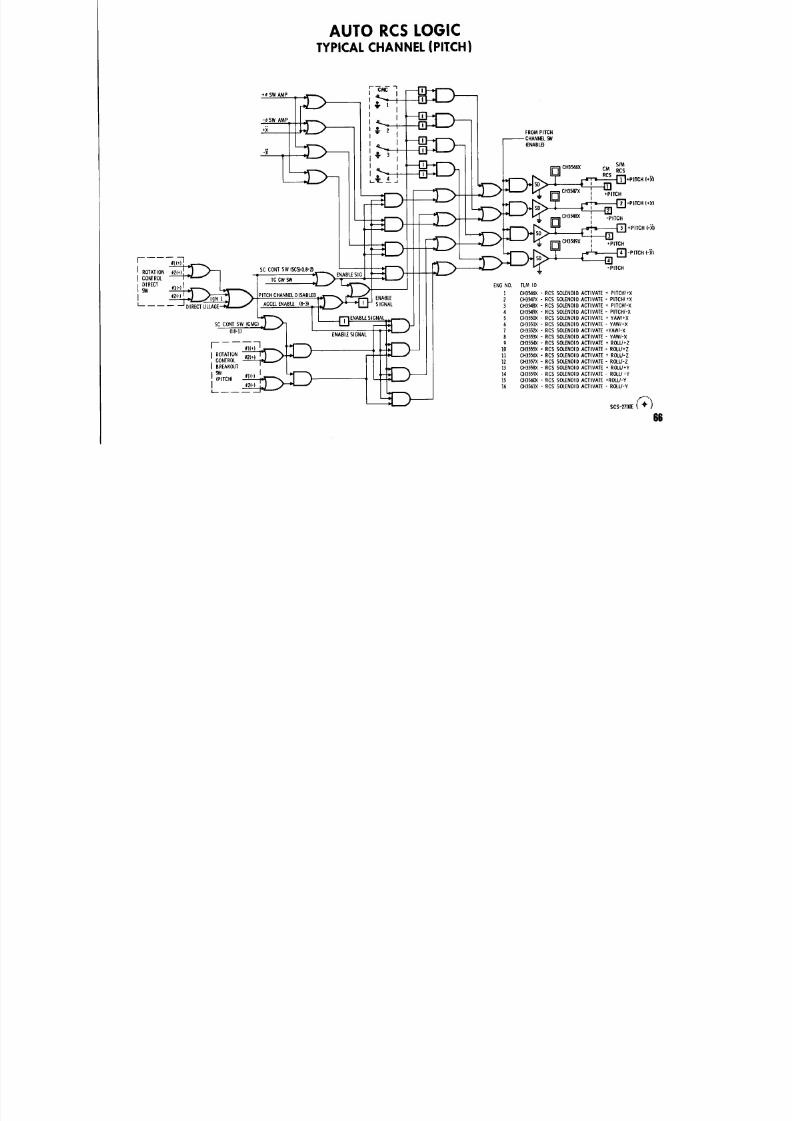
AUTO RC S LOG ICT YP ICA L CH A N N EL (P IT CH )
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 70/148
+e SWAMP J
_'iI w-- I-e. SWAMP_
ENABLD
CH3 N6X CM RCS
RCS r_l+PiT C H (+_l
CH3547X I +PITCH
,;J
II c!- mH354 8 X I "PITCH
_ I __ +P I TCH( -R )
[ ! -- CH3 54 9 X I +P I ICH_z I I'_'l _p iTCH(_ _)ZI _ o
I _ ]1 - • []#2 (+)I _} _ SCCONTSW(SCS) (18-2) /Ii 1 -I -PITCHI ROTATI ON 7 ,:l-h hi J I • I"_'_EN ABLESIGJ T "_l T
[ CONTROL z -_ I ! T C C W _ ] _l _, - i _--
I°_ECT _ / "-1 M-",,I ENONO .LM.DW i CH354 6X- RCS SOLENOIDACTIV ATE+ P ITCH I +XI # 2(-)J _ _ I P IT CHCHANNE LDI SABLED _J, ,_,,__ I ENABLE 2 CH 3 94 / X- RCS SOLENO I DACTI VATE- P I TCH/ +X
' "_-'_DI_-T_LC_G YU ] ACCELENABLE8-3) T_}_ S IGNAL 3 CH354 8X-RCSSO LENOIDCTIVATE+ PITC H/-X4 C H35 4 9 X RCS SO LENOIDACTI VATE PI TCHI -X
ENABLES IG NAL_ _. S CH355 0X- RCS SOLENOIDACT I VATE+ YA W/ +XSC CON[ S W ( CMC) t _ I _ Iz l 6 CH355]. XRCS SOLENO I DACTI VATE- YA WI +X
1 1 8- 11 E NABLESIGNAL -w. 8 CH 355 3X- R CS S OL ENOI DACTIVATE- YAW I -X
-- -- _ )--1 9 CH3P54 X RCSS OLENOIDACTIVATE+ ROLL/+Z'_ + 10 CH3555X R CSS OLENOIDACTIVATE ROLL I+ZROTATI ON_ _ T ILl 11 CH3556 X RCS SOL ENOIDCTIVAT E+ RO LU-Z
I CON TROL _- -- J 12 CH355 7 X- RCS SO LENOI DACTIVA TE- ROLL / IT
'"EAN OOT0, ( . I,. --., L C, ,B×RCSS OLEN OACT ,V ATE+RSW ].4 CH3559 X- RCS SOLENOIDACTI VATE- ROLL/ _Y(P IT CH) _ l ) 1 5 CH356 0X- RCS SOLENOIDACT I VATE+ROL U-Y
L , , ( -, _ . J _oCH_,0_× - RCSSOLEN O,ACT, VATE - ROZI ) SCSI2700 _ ( + j
6 $
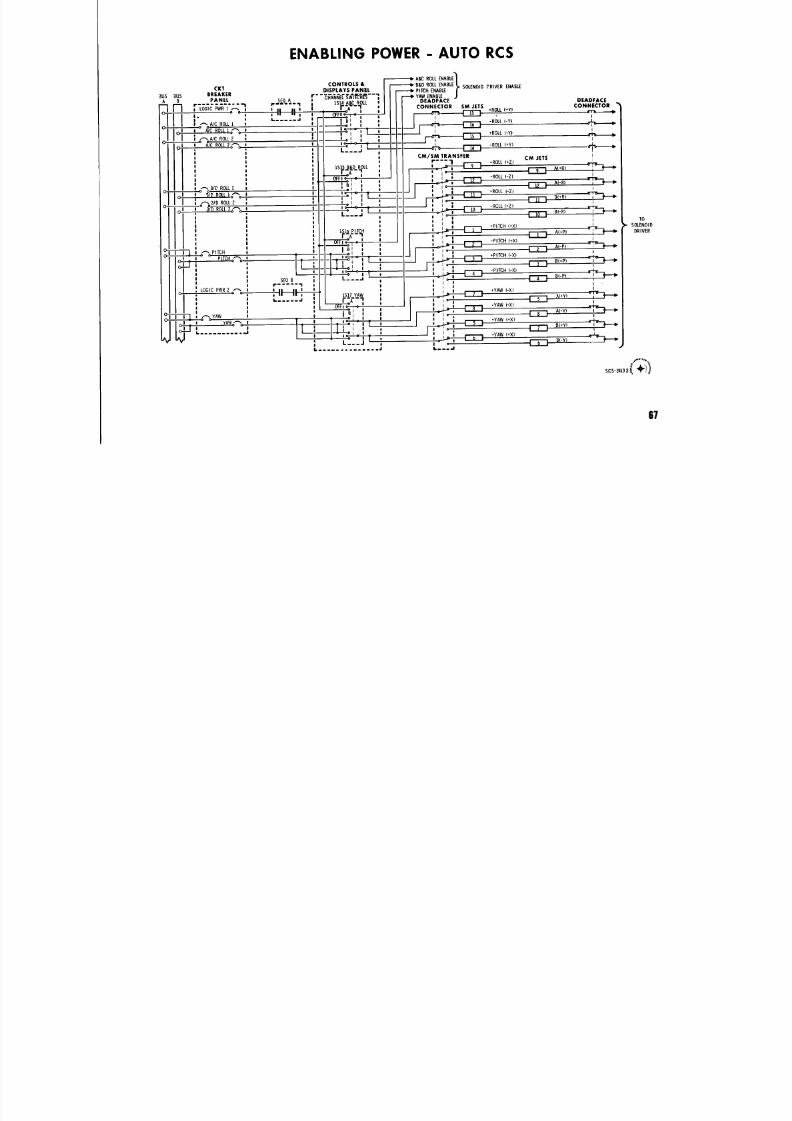
ENABLING POW ER- AUTO RCSI , A&CRCLLENA8LE
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 71/148
,
CONTROLS & -- BAD ROLLENABLE , SOLENOIDPR WER ENA3 LECKT DISPLAYS PANEL ENAB LE
BUS BUS BR EAKER f" ° " _H'A'N_E_ _'_A_'_L_ - -" ENABLEA 3 PA NEL S EQA DEADFACE
IS14 A_ ,_CROLL DEADFACE
FI :" "o :_l CONN,C,O, ,_ 'l ' .....I ,,'1, r' A -l CONNECTOR SM JETS +ROLLI+YI _
I]111 " -. I ! | ' i
I . S. J I - ROLL (-Y)I _ A/C RO LL i _ ="
joj I oI ! o A_(;:OLL:"% ,0 - I I-I_11 I ,---AJCROLL2 _ _ +ROLLI-Y , __ :
Io i I I I A/C ROLL 2o '_j ,JJ,° _ °; _ F-_ l -ROL L+Y,
_ CM/SM TRA NSF ER CM JETS IROLLI +ZIu i ,_---,
I i _ A(+R ) I-ROLLl-Z) II
o r_oBID ROLL! I 12 I A(-R) Ii rI° I_l ' _I_ +ROLL I-Z) ,o I_'--I-- : I II I 3(+RI i r
I_1 I-I ; o"-',o3 1DROLL2 l II -RCLL(*ZI 'I___ . , ,.. _ r_ .' --_
l] li ! : '+'+I TO
0 I _ SOL ENOID' _ I I I +PITCH (+X)
t '= " _ AI+PI _ DRI VERI - PIT CH (+X) I
, I I 2 I II __- -T-I , __ PITCH I _ I B.I T _ Ai.p ) ; • :_O' l i I I PITCHo , I -o-_-=/I I°i T i ° i " F'T'I B(+P)
-! i . _-_ t , . .._ F-_ -R,TCH -X)I : P- -'''"ISEQB L---J I I I 4 I I_-P) I " ;
LOGICP WR2 _ i I I_ ll I _ I t
/1/I ° 1 ' ._ a, , ' _r-A'-IS17 YAW i 'o _ _ *YAW (-X)
"
[, ,_ '- ..... J _ ,__]--- ,' ," I 5 I A(+Y)I
i i I B_I ] I _ _ "YAW (-X)I_ _ i _ YAW I I- I: _ A_-Y) _ _"IC>l I I _ I YAN^ T - I on I : I + YAW(+X), , o , _, =, ,, ,,_ i,
O I I L .......... , .I / i ' I _ I,,o ; _ _ B (+YI tI_"--JLL,J / ' | i % :'1 I , I _ _ "YAW (+X ) o[ L---J ! ! o- _ B(-YI T ;L ......... _ o. ..& I.----.J
o *,
6 7
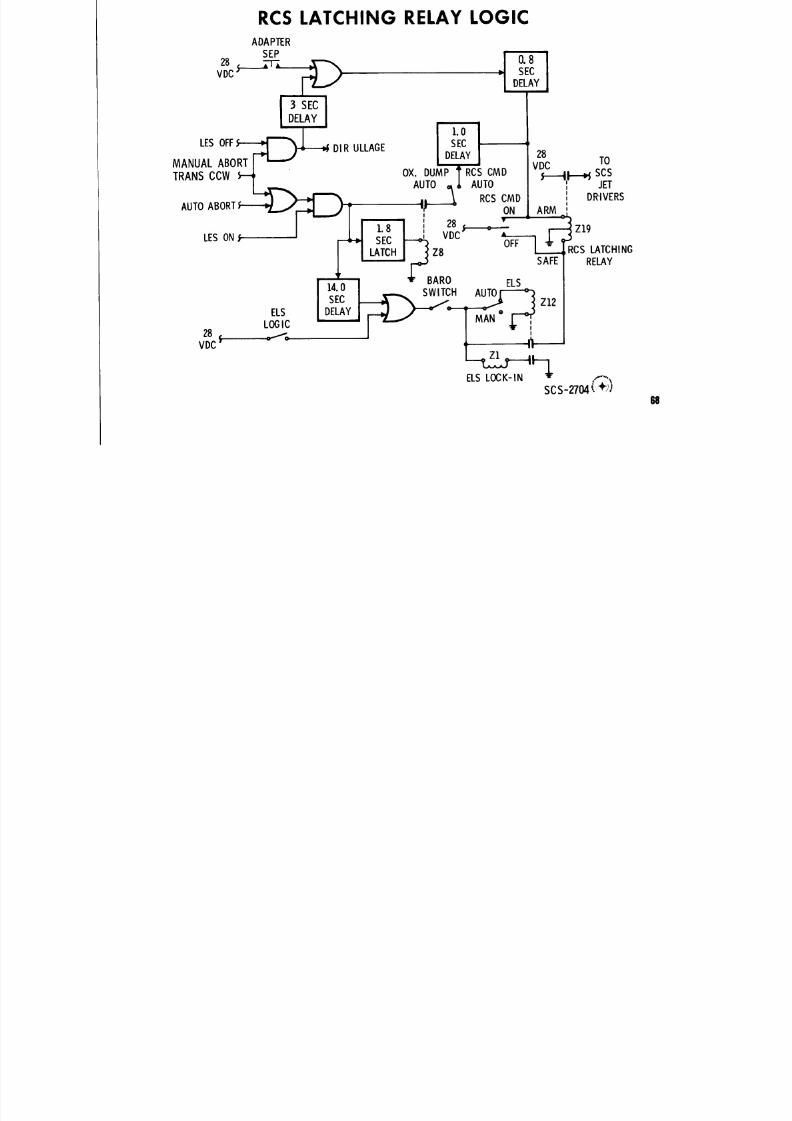
RC S LATC HING RELAY LOG ICADAPTER
28 _ --r-_m"_ O .8SEC
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 72/148
VDC "l DELAY
i IS Ee
DELAY
1 . 0
LESOFF DIRULLAGE SEC
MANUALABORT DELAY 28 VDC TO
TRANSCCW OX. DUMF _ RCSCMD , ,' -_ SCSUTO AUTO " "
AUTO ABORT J' " _" RCS CMD ,, " ' J ET, DR-IVER S1" 'F ON ARM I
/ I 1.8 I ,, 28_ _ z19LESON , _ SEC I :_ VDC OFF | J =-
l ILATCHI; z8 'S AFE_ RCS LATCHING
LOGIC MANo28 ,V DC '
ELSLOCK - IN ,,"_,_,SCS-27 04 ( ÷;J
68
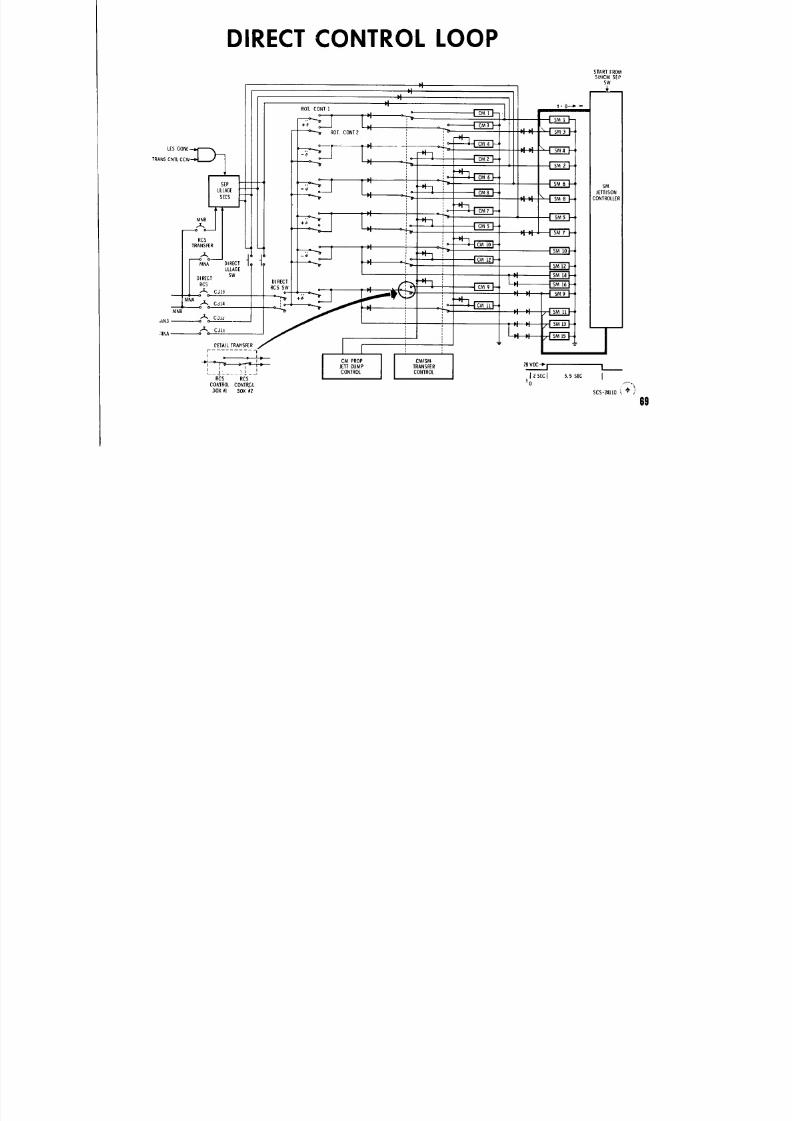
DIREC T C ONTROL LOOPSTARTFR OMSMICM SE P
SW1 4
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 73/148
SW1 414 _
1 4
14 1 t, 0--- _o_ROT . C ONT i |
i i : : _ r_-h ,LES GONE--_',_ ._1
TRANS CN 11 .CCW'-_ I "_" / _ IIEP I I -_ULLAGE
R CS I
TRANSFER
o o
MNA DIR ECTULLAGE
S WDI RECT
RCS
_o C_13 ',i
MNA ::' _o C._14MN B
,_lN3 o ,";k,,oC31(:
, 'A
NA o,'_o C311
['ETAIL TRANSFE R I "-I-........... i I
_ i _ J ETTDUMP TRANSFE R Ii \ i, i J CON TROL CONTROL-_ ...... I ZSECi s.s S EC ICS R CS
CO MTROL CO NTP _GL t 0_ox , _ox,z scs-z4.c _ :i
8$
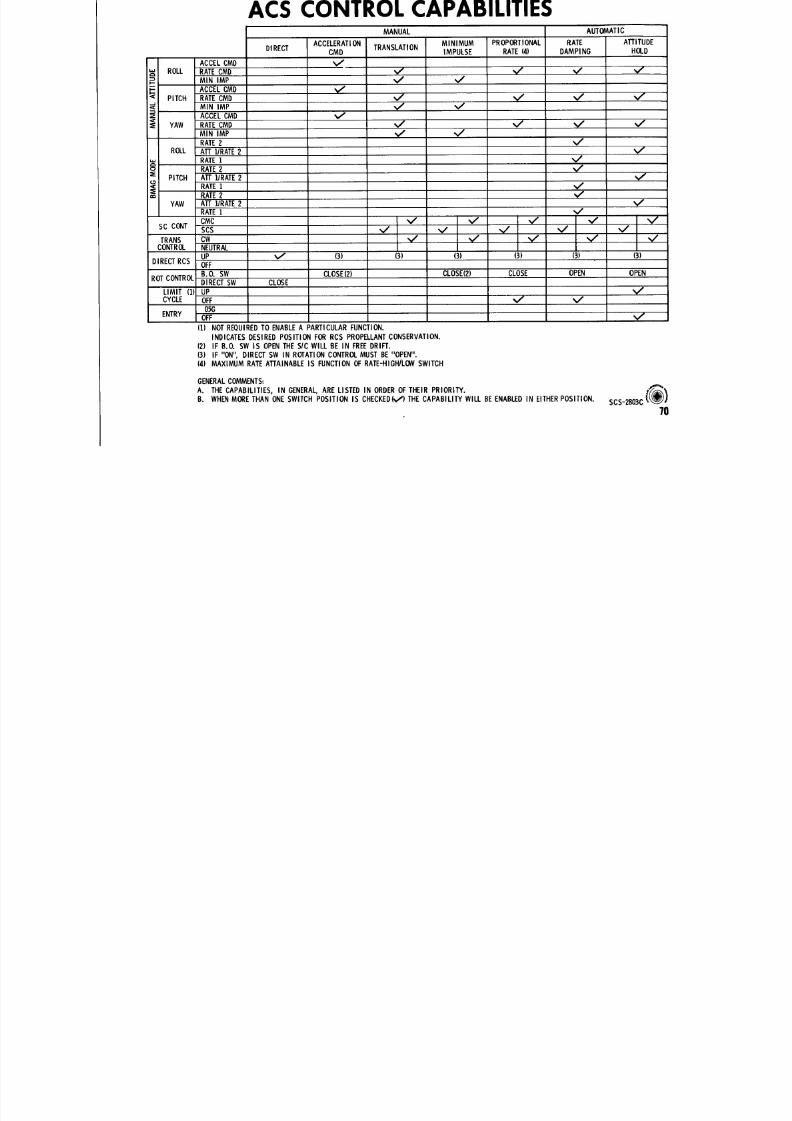
AC S C ONTROL C APAB ILITIESMANUAL AUTOMATI
ACCELERATIONTRANSLA TION MINIMUM PROPO RTIONAL RATE AI "rlTUDEDIRECT CMD IMPULSE RATE4) DAMPI O HOLD
I ACCELMD_ ' ROLL RATEC MD _/ _/ _, / _/'
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 74/148
MIN IMP _CCELMDP TCHRAT EMD _ _ _
i MIN IMP ,v x/
ACCEL MD
YAW RATECMD _ _ _ /MIN IMP _' _ /RATE2
ROLL ATTI / RATERATE 1
RATE 2ITCH ATr] /RATE2< RATE=Em RATE2
YAW A ll" ]/RATE2RATEICMC
SC CONT S CS _ _ _ / _TRANS CW _/ _/ _/ _/
C ONTROL N EUTRALUP _ (3) (3) (3) (3) (3) (3)
DIRE CTR CS OFF
ROT CONTROL B.O. SW CLOSE(2 ) CL OSE(2) C LOSE OPEN OPENDI RECTS W CLOSE
LIMIT (1) UP _/CYCLE OFF _
0 5G
ENTRY OFF(1) NO TRE QUIREDO ENABLE PARTICULARUNCTION .
INDICATESDESIR EDPOSITIONFO RRCSPROPE LLANTONSERVA TION.(2) IF B.O. SWIS OPENTH ES ICWILLBE IN FREEDRIFT .(3) IF "ON", DIRECTSW IN RO TATIONCON TROLMUSTBE "OPEN ".(4) MAXIMUMRATEATTAINABLES FUNCTIONOFRA TE-HIGH /LOWWITCH
GENERALOMM ENTS :
A. THECAPAB ,LI T ,S . I NGENERAL.AR E LIS TEDI NORDER OFTHE IR P RIO RI TY. { '* _'_ .. _._. WHEN MORE THAN ONE S WITCHPO SI TI ONIS CHECKE D(_)THE CAPAB I LI TYWILL BEENABLE DI NEI THERPOS I TI ON. SCS- 28 0 3 C7 1 }
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 75/148
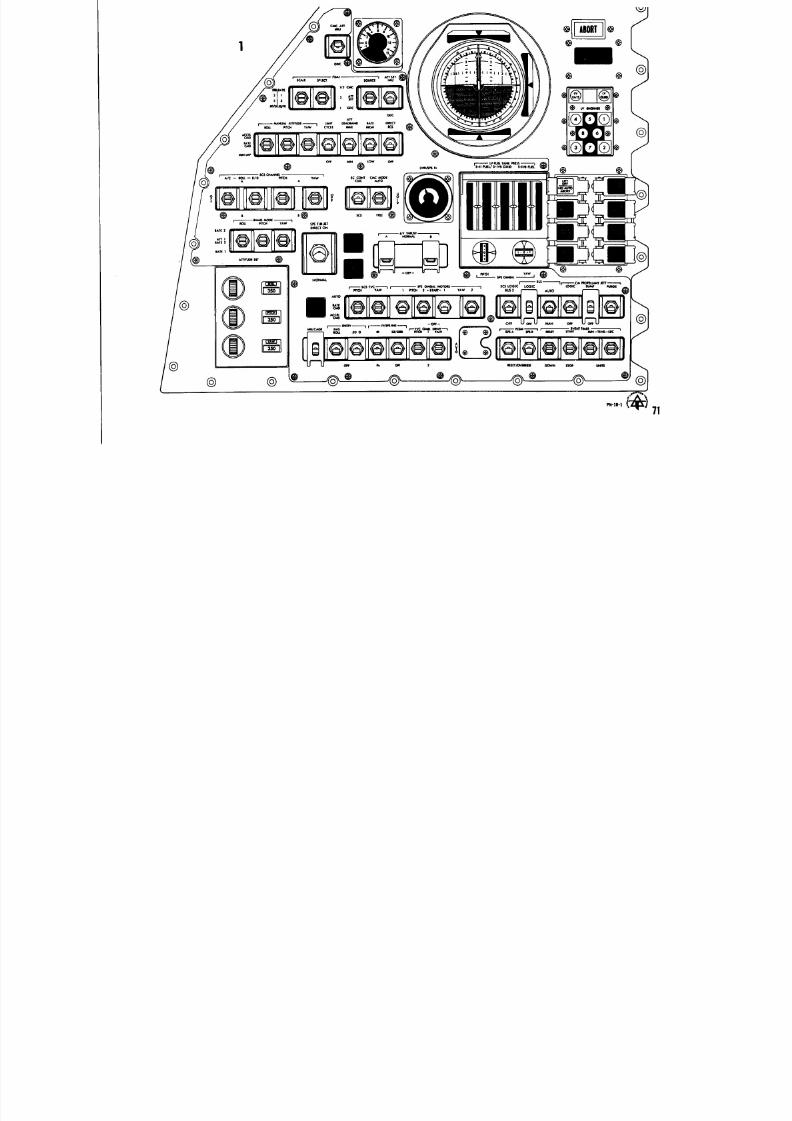
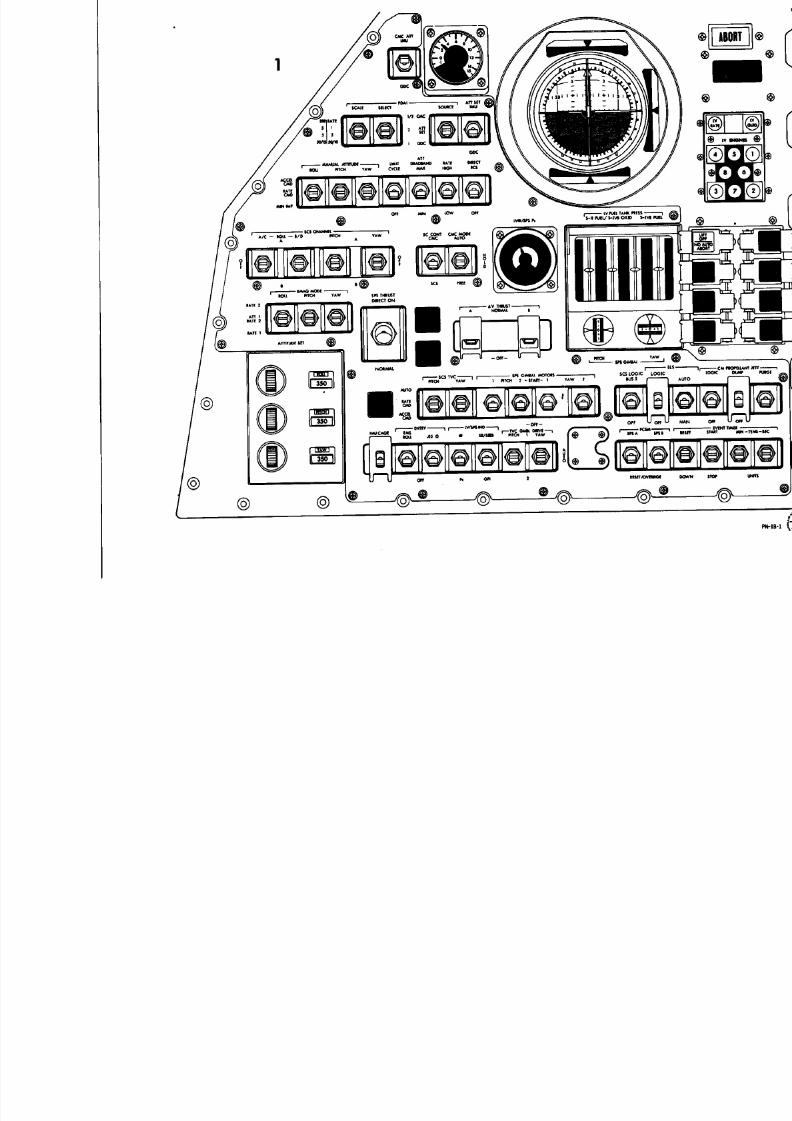
PN'IB-I
7 1
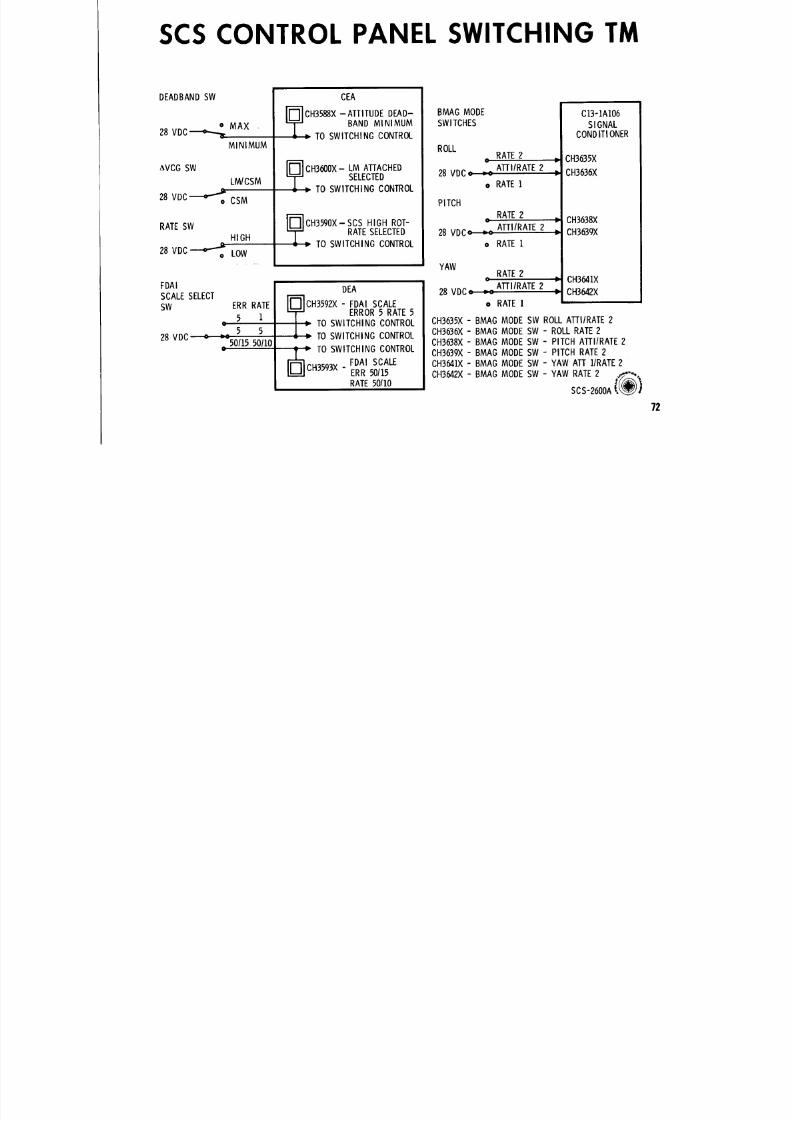
SC S C ONTROL PANEL SW ITC HING TM
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 76/148
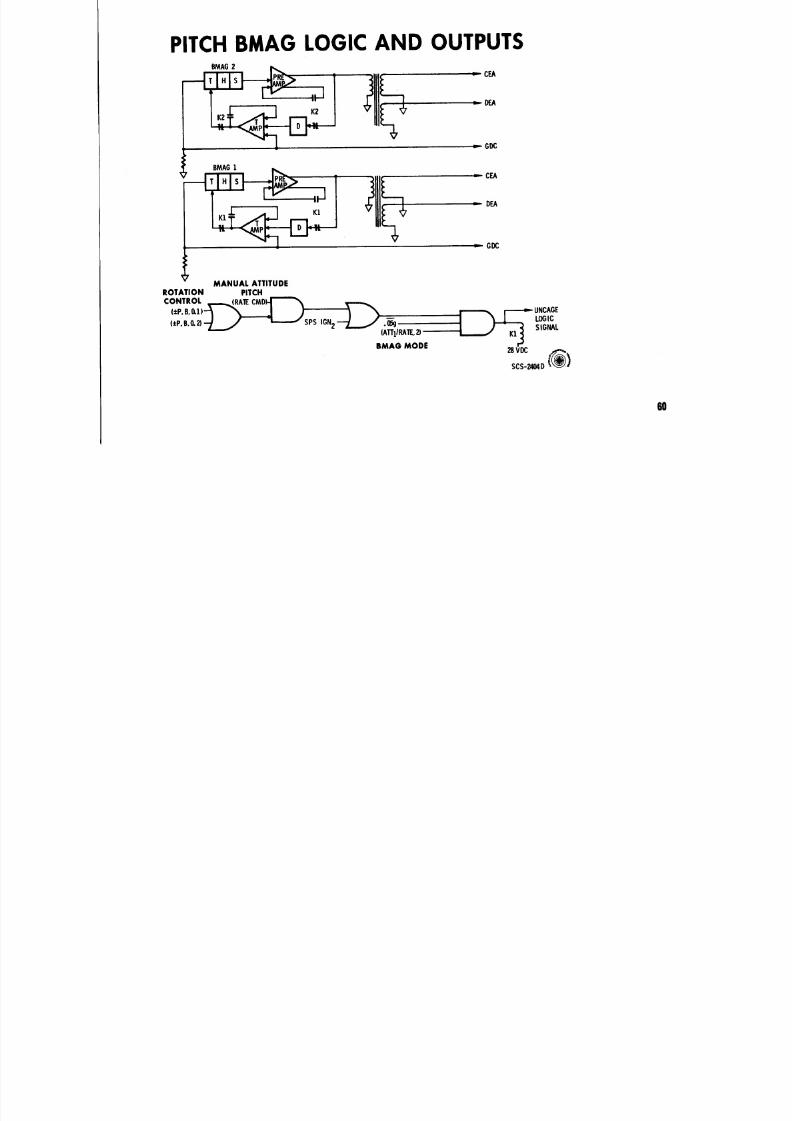
DEADBANDW CEA
I'_IcH3 588X -ATTITUDE DEAD- BMAGMODE C13-1A106
o MAX 1L BANDMINIMUM SWITCHES SIGNAL28 VDC _ _ - - TO SWITCHINGCONTROL CONDITIONERMINIMUM ROLL
AVCGSW I_ 1 CH3 600X-LMATTACHED o RATE2 _. CH3 635XLM/CSM _ SELECTED 28 VDC o :- : ATTI/RATE2 "=!1CH3 636X
28 VDC _ -_ _ TOSWITCHINGCONTROL o RATE1 Io CSM PITCH I-_-']CH35 90X-SCS HIGHROT- o RATE2 _ CH3 638X
RATESW _ RATESELECTED 28 VDC_ ATTI /RATE2 .=. CH3 639X
HI GH I28VDC _ - _; TO SWITCHINGCONTROL o R ATEio LOW
- -_ YAW RATE2o _ CH3 0 41X
FDAI DEA 28 VDCo ATTI /RATE ;!SCALESELECT -- : I CH3042XSW ERRRATE I-_'lcH3592X - FDAI SCALE o RATEI
L._ ERROR 5 RA TE5
_. 5 1 i _ TO SWI TCHINGCON TROL CH3635X BMA GMODES W ROLLATTI/RATE228 VDC o __ 5 5 -_ ; - TOS WITCHINGCON TROL CH3 636X BMAGMODES W - RO LLRATE2-'5011550 110 CH3 638X BMAGMODESW- PITCHA TrI/RATE2
• _-= TO SWI TCHINGCONTROL CH363 9X- BMAGMODESW- PI TCHRATE2
....... FDAI SCALE CH3 641X BMAGMODESW - YAWATTl /RATE2,n_wx - ERR5 0115 CH3 642X BMAGMODESW- YAWRATE2
RATE 50 /10 SCS - 2600A_._)
7 2
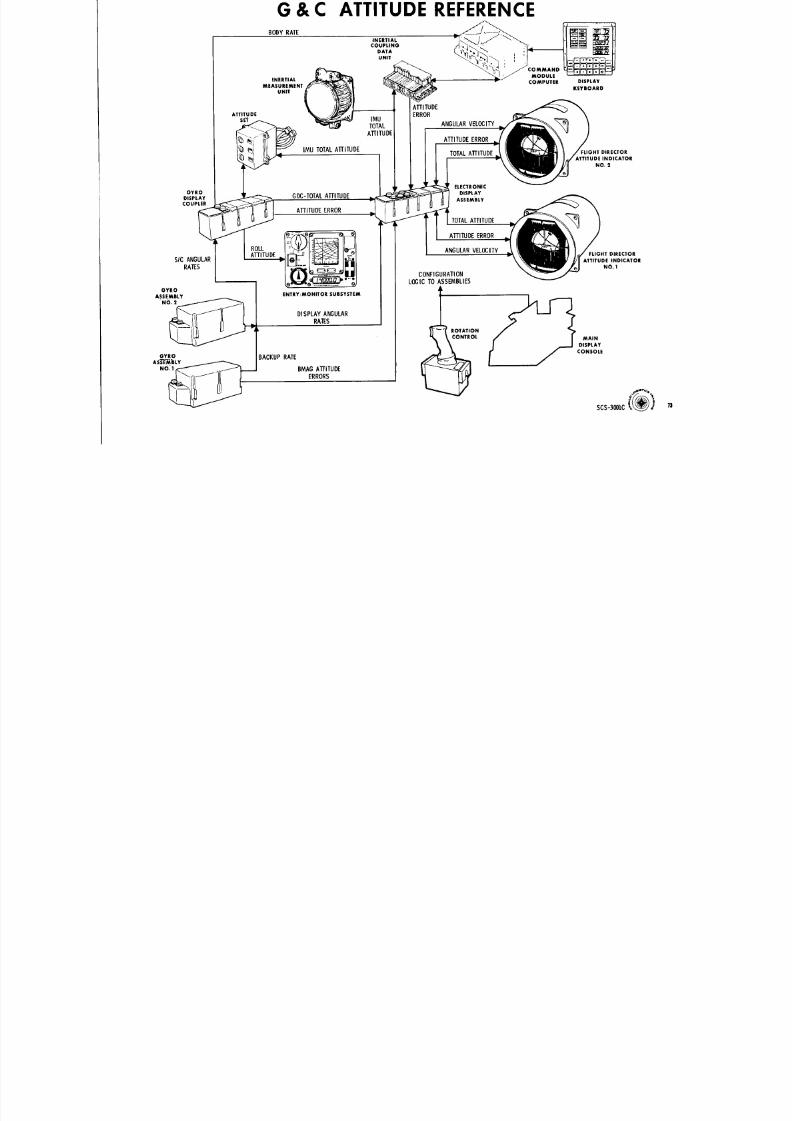
G & C ATTITUDE REFERENCEINERTIAL _
COUu :L,NOMEASUREMENT / COMPUT ER DISPLAY
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 77/148
MEASUREMENT /_ -_ _ , COMPUT ER DISPLAY
UNIT _ )_]_1 ATTITUDE KEYBOA RDATTITUDE _ _o l
_ _ IMU ERROR
TOTAL ANGUL ARVELO CITY
ATTITUDEERROR
__ IMU TOTALAITll_IDE TOTALALTITUDE FLIGHTDI RECTOR
AT TI TU DE I ND IC AT O RN O , 2
ELECTRONIC
DI_YI_ Oy , _ GDC-TOTA/ATrITUDE DIS PLAY
COUPLER _--_ , _l_'_l - I ASSEMBLY
_ - _ - ___ __ ATT I T UDEERROR TOTALATTIT UDE._ _ /..--r ,p
ROLL.... AN GULAR VELOCIT YS I C ANGULAR J ATTITUDE_!_,-._ : J_Jl _ - ' ] HT OmECTOR
RAIIZS I_-L- _ _j _ ATTITUDE INDICATORO.I
Le _e_ ,_J CONF I GURATIONoY,o -- m-' LOOlC OSSEMBLIESAS SEMBLY m ENTRY I MONITOR SUBSYSTEM
..J-_ I I I / DI SPLAYNGULAR
DISPLAYC O N S O LE
GYRO IBACKUPATEASSEMBLY _ m
NO. 1 _ _ ,._"'_1 l BMAG A' FrlTUDE
ERRORS
i m _ t e o
s c s - 3 o o _ c_ Y "
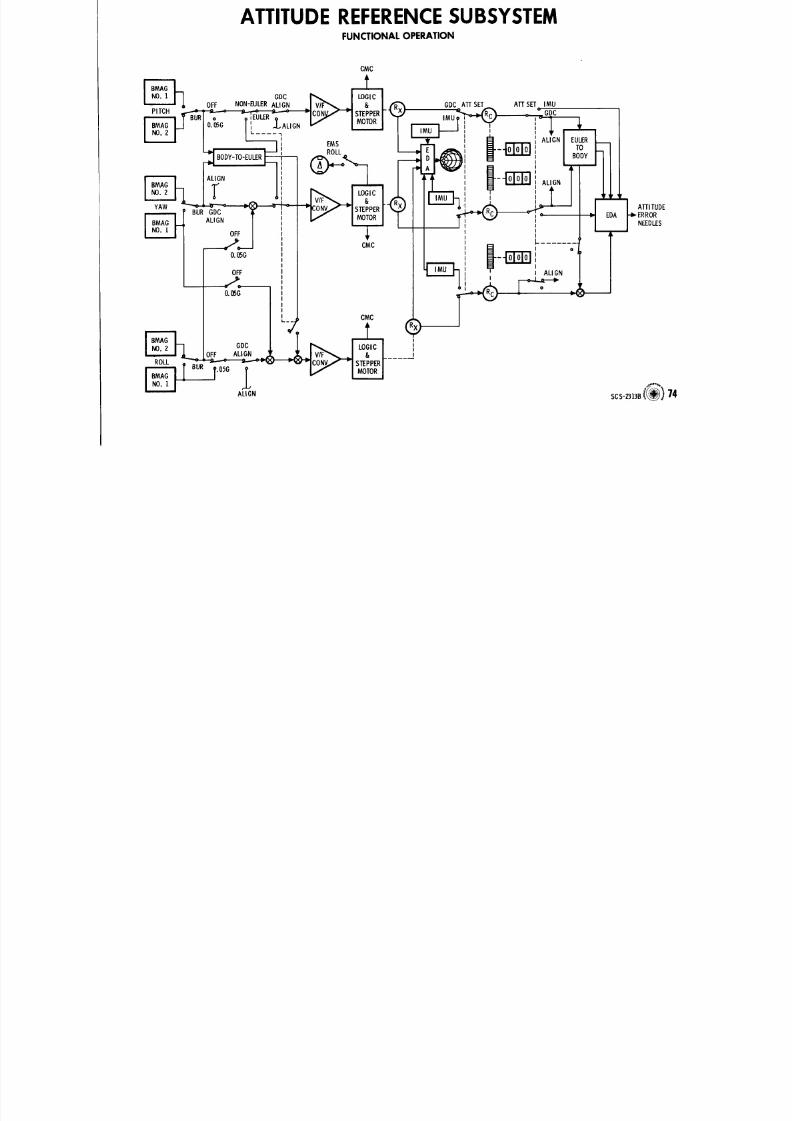
ATTITUDEREFERENCESUBSYST EMFUN CT IO N A L O P ER ATIO N
CM C
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 78/148
GDCFF NON-EULERALIGN GDC ATTSET Al'I"ET IMUP I TCH a
GD C Io EULER IM Uo I RC .
0._o_....,o_ _I,_ _ IEMS I _ : AL I GNI EULER ___ J
,o0 v To ,o,EAL, . _N i I _ - _ ALI GN--T-_,-- J _ _
Y A WB U R GDC
! _'- - ._,_,J - " " ' _ c d A I -_ERROR
ALIG N - J ' I I NEEDLESF F
cMc _ _ .......0.05G ._
OFF ALlGN
• o
O.05G v
CMC
I
G D C
OFF ALIGN & I- ....
ALIGN SCS-2 "313B_) 74
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 79/148
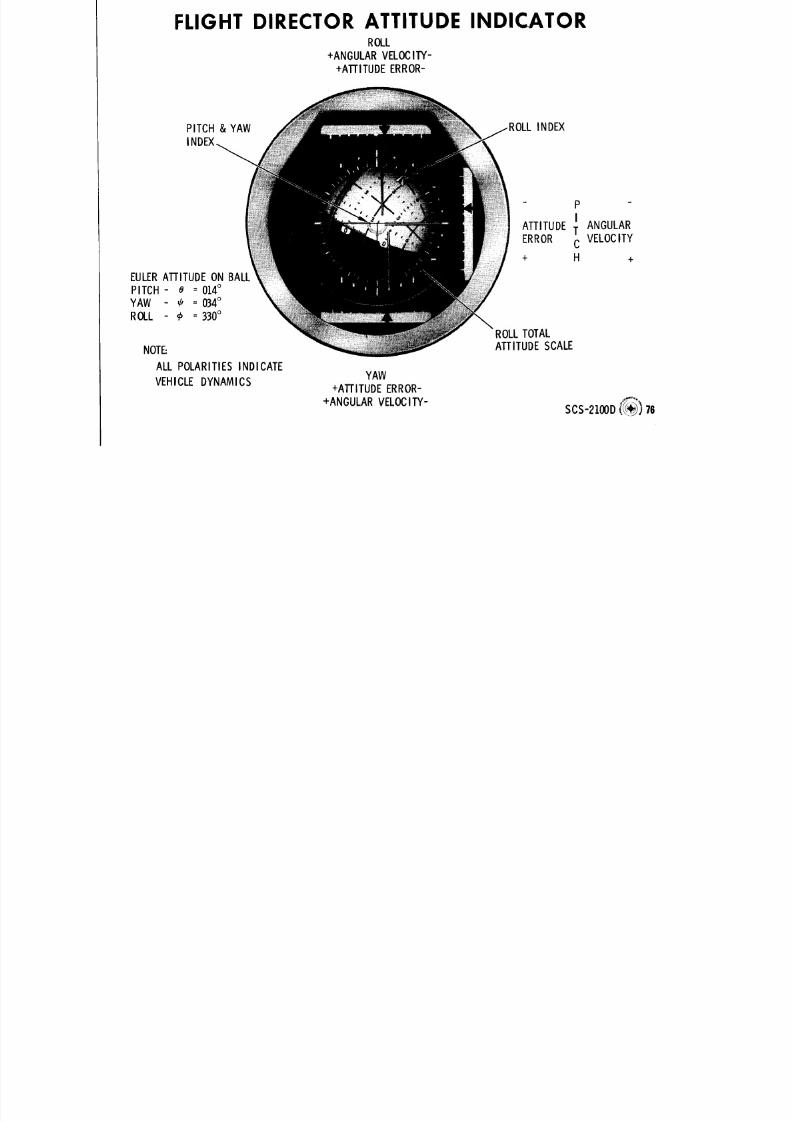
FLIGHT DIRECTOR ATTITUDE INDIC ATORR O L L
+ A N G UL A R V EL O CI TY-+AI-rlTUDEERROR-
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 80/148
PITCH & YAW INDEX
p
I
ATTITUDET ANGULARERROR C VELOCTY+ H +
EULERATI'ITUDEON BALLPITCH- e = 014°YAW _ = 034°ROLL ,/, = 330°
ROLL TOTA LNOTE : ATTITUDESCA LE
ALL POLARITIESINDICATE
VEHIC LEDYNAMICS YA W+ATTITUDEER ROR-
+ANGULAR VELOCITY-SCS-2100 D_) 76
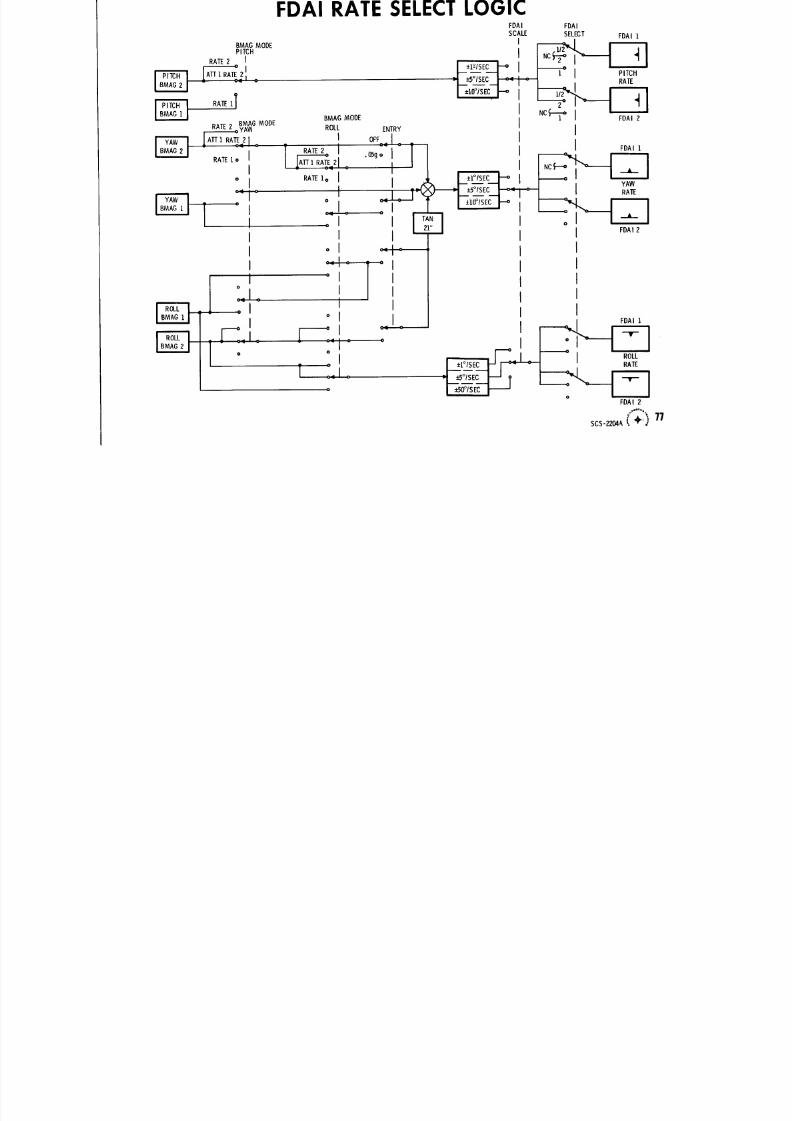
FDAI RAT E SELECTLOGICFDAI FDAI
SCALE SE LECT FDAI 1BM A G M O DE
PITC H _lRATE2 I
° I ±I_-/SEC 1 I PITCHATI 1 RATE2I : :t:5° SEC RATE
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 81/148
RATE11 : t:lO°SEC 2 °_AGODE NC_T"I FDA,B MA G M O D ERATE2 o YAW ROLL ENTRY I
RATEi o IATTI RAI'E+2 1 .05 go
o _,__oI I _°--: I I I ' _ _ °'sEc "-'- I YAWRAT E
_ I_ °=1 _o°,_c IoU I o1- I "
I I I FOAl2I '-- Ic_I
° I I
° I I _OA,,C_ 3 =_ -- :, o I
° ° I ROLLJ : I:I°S EC RATE
i c_ J - :IS °S EC •
. _ 5 0° I SECo
FDAI 2
SCS-- 2204 _l ( +.i_ 77
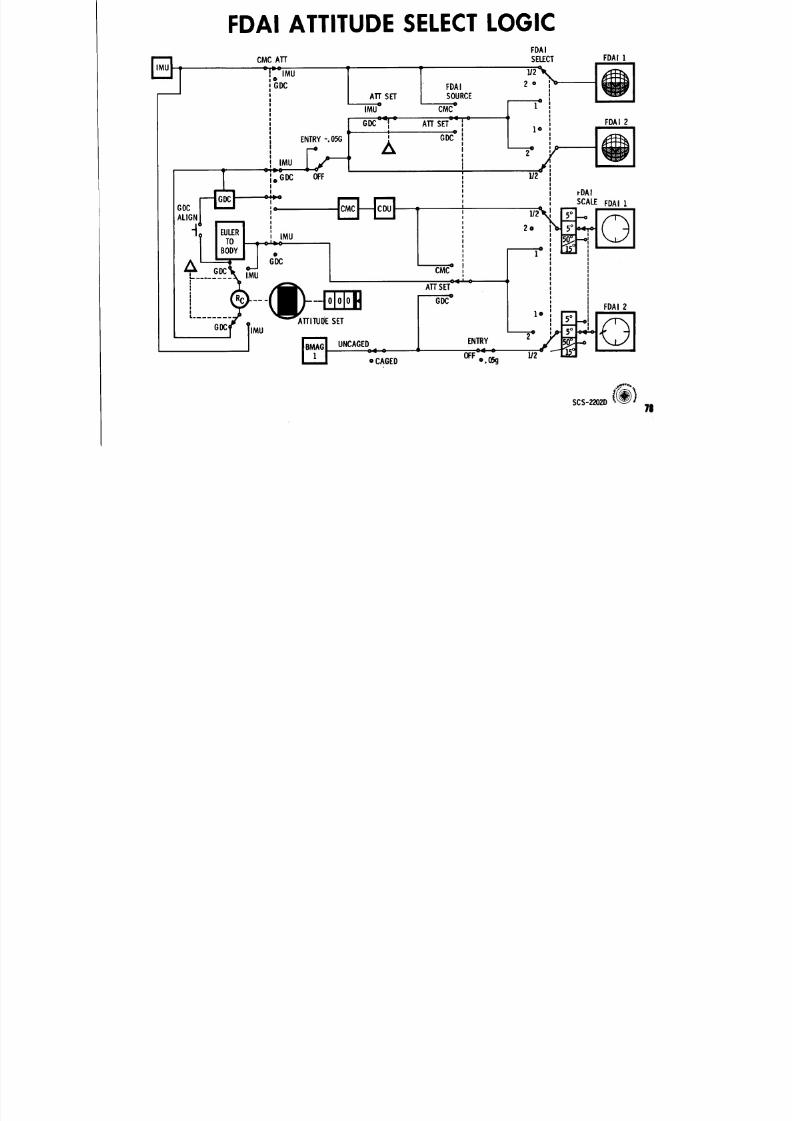
FDAI ATTITUDE SELEC T LOG ICF DA I
Bi T

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 82/148
Bi TMU:' CMC: t
GDC°l : ATTSET-- : FDAI 2ENTRY". 05(; ' GDC
I IMU
2
_GDC - OFFI rDAI
' SCALEDAI--'--" Io
°°cLIGN I 1/
-I : 2_l_JMU
o iGoc _ 1
'_ IMU :-- :i I
ATTET II
FDA
"......... ATI'I_OE SET 1" I _]._e !
_ UNCAGED- ENTRYCAGED OFF-e "O_j 1/2
7 !
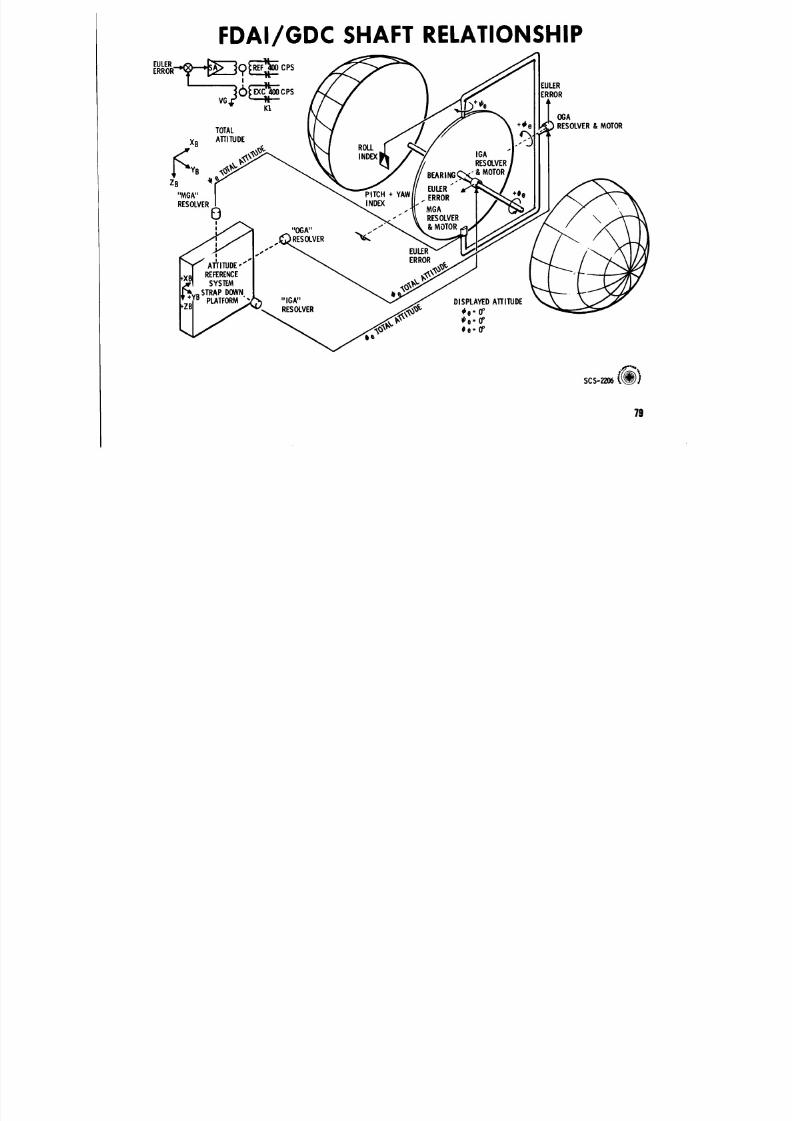
FDAI/GDC SHAF T RELATIONSHIPEULER._,f,'_ _
CPS ERROR
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 83/148
CPS ERROR
VG +¢'eOG A
TOTAL RESOLVER MOTOR
XB ATTITUDE R O L L
INDEX IGAB -'& MOTORZB " _ EULER ""
"MGA" + YAW .. ERRORRESOLVER IND EX
0 .. MGA" RESOLVER
"OGA" / / & MOTOR
J_ s_
I EULER, ERROR
ATTITUDE""R E F E R E N C E
SYSI£MSTRAP DOWN
PLATFORM "IGA" DISPL AYEDTTITUDERESOLVER #e"0°
,e .O °#e.O _
7 9
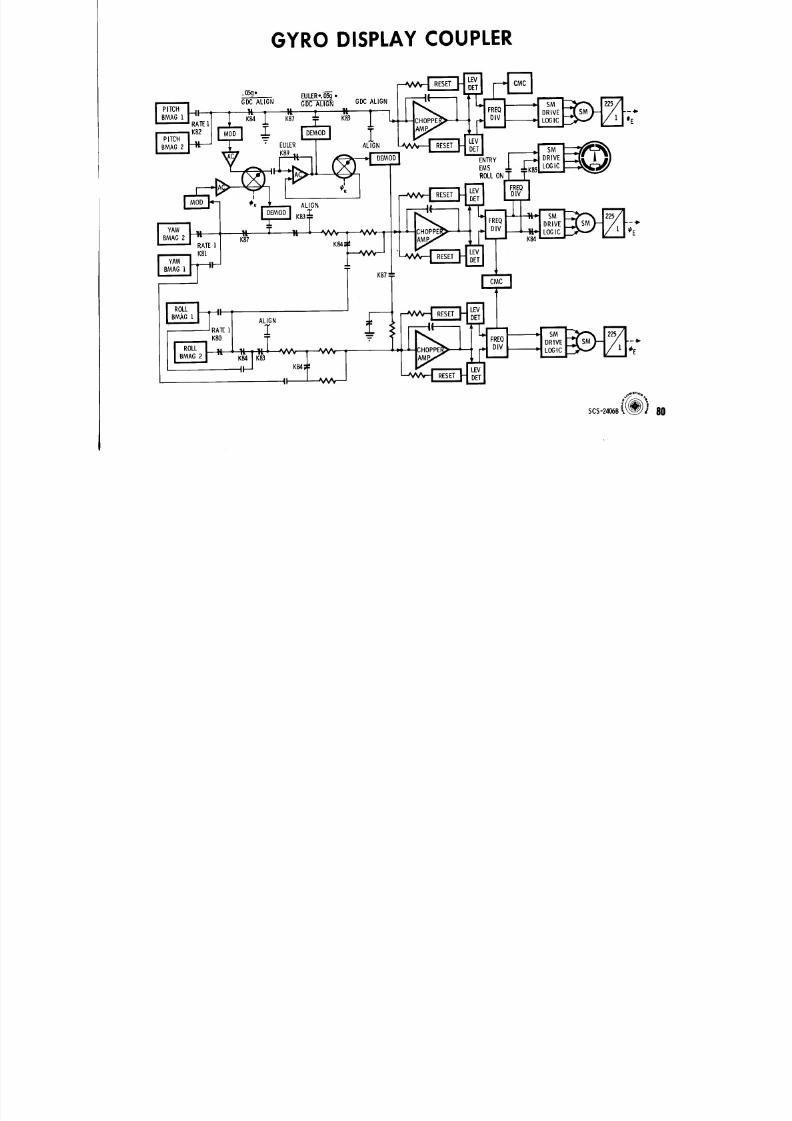
G YRO DISPLAY C OUPLER
0 ° EULER"5cJ
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 84/148
0_• EULER".5cJGDCALIGN GDCALIGN GDCALIGN
K84 K87 K83 J E
_ TEULER ALIGNK8 9
ENTRYE MSROLLON"
I
O_I
'/'¢ ALIGN
0 EK 8 7Kgl;
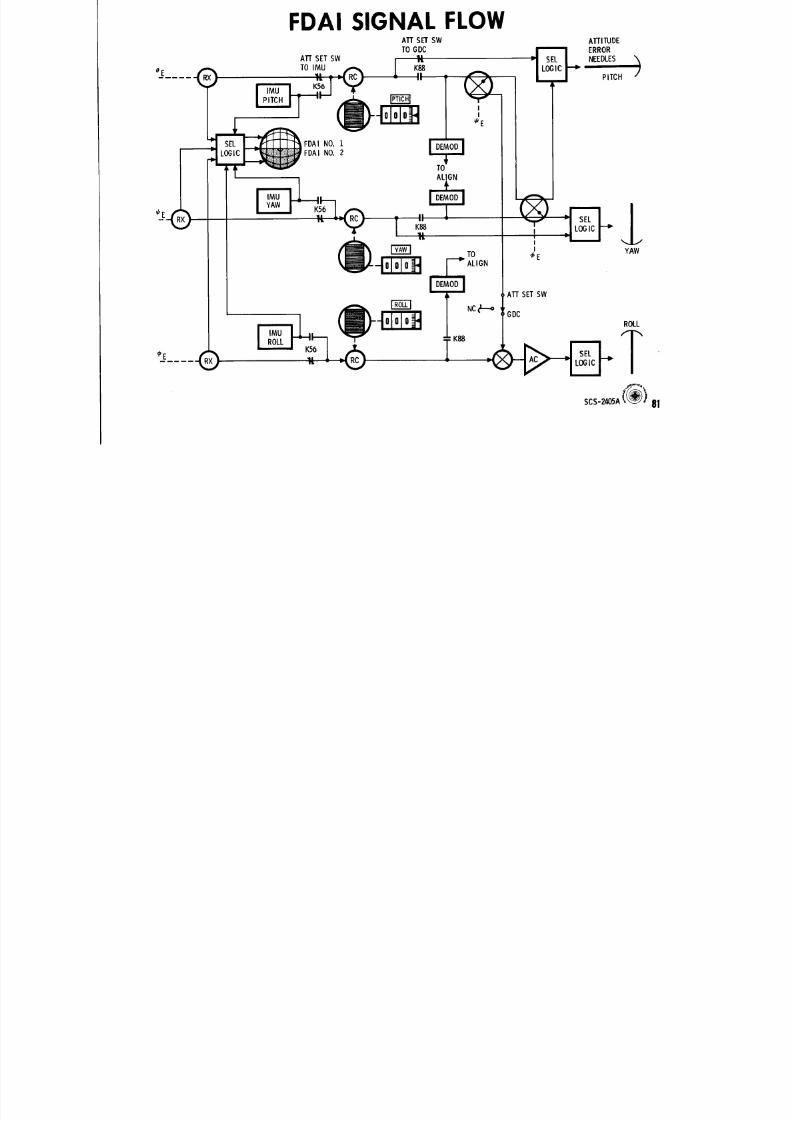
FDAI SIG NAL FLOWATTSETSW AI"rlTUDETOGDC "1 ERROR
,o. o=, _ -I,-.q )
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 85/148
-IololoMFDAI NO. 1FD A I N O . 2 i _,._ !
,I ,TOALIGN
o lo loH '_'°_,ATT SET S W
ENTRY DISPLAY SIOi
®LV ( UP )
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 86/148
I o ,O i ®
0 LV , ,OR .)DI__
;LV (DOWN) STABA XIS
(FLIGHTPAT H)ORTH
QIoo lo _l ee A
SCS -22 0 7 B_£'_!_
g 2
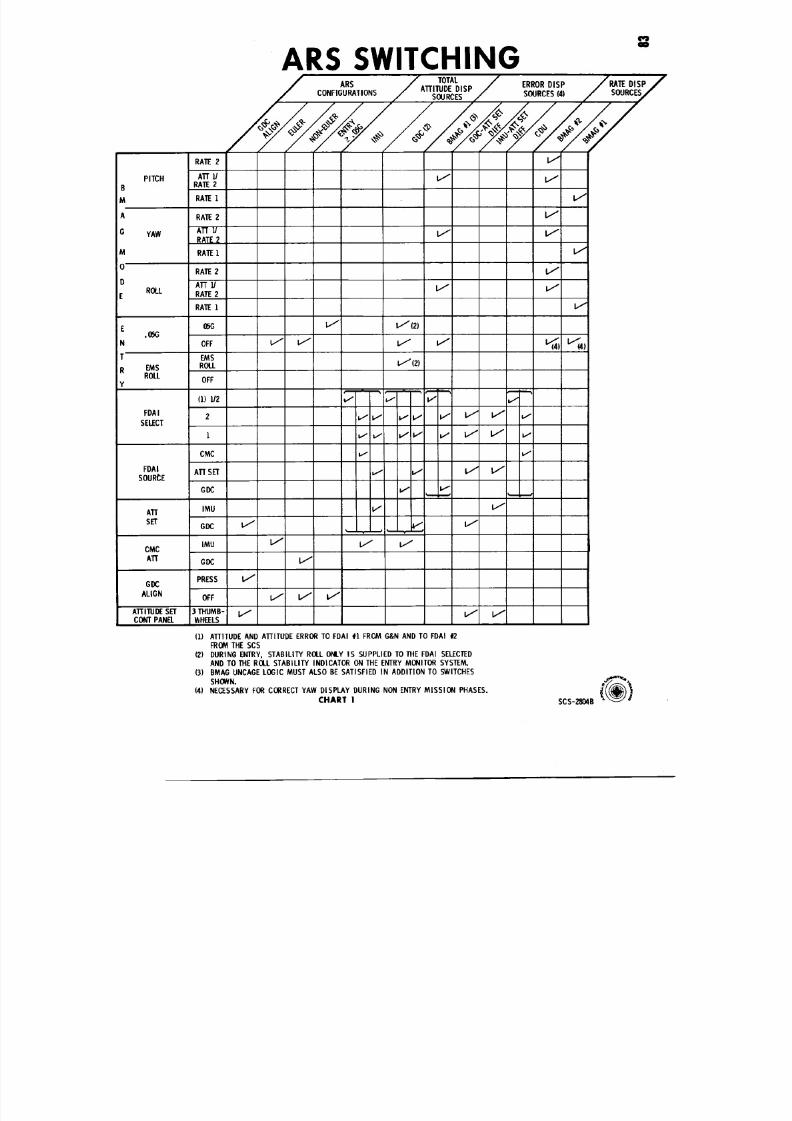
ARS SWI TCHINGARS T OTAL ERRORDISP DISP
CONFIGURATI ONS A'ITITUDEDISPSOURCES S OURCES4) SOURCES
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 87/148
SOURCES S OURCES4) SOURCES
RATE 2
PITCH A TI"1/ _B RATE2M RATEi I. ,
A RATE2 I 'I
G YAW All ]J V L.fRATE2
M RATEI I ,, I
_O RATE2 1 . 11
A'n"U
IE ROLL RATE2RATE! 1 11
(]5G I-_ I,'/(2)
iE .(]5GIN OFF I / _ 1.1" I,,'/ _ _ )!T EMS
EMS ROLL L""I (2)Rl ROLLiY OFF
(l)1/2 _ / "_-I " v" " , I"FDAI 2 !_,,,__ _ ¢/ k_ 1.11 I,,/
SELEC T i: L
CMC _
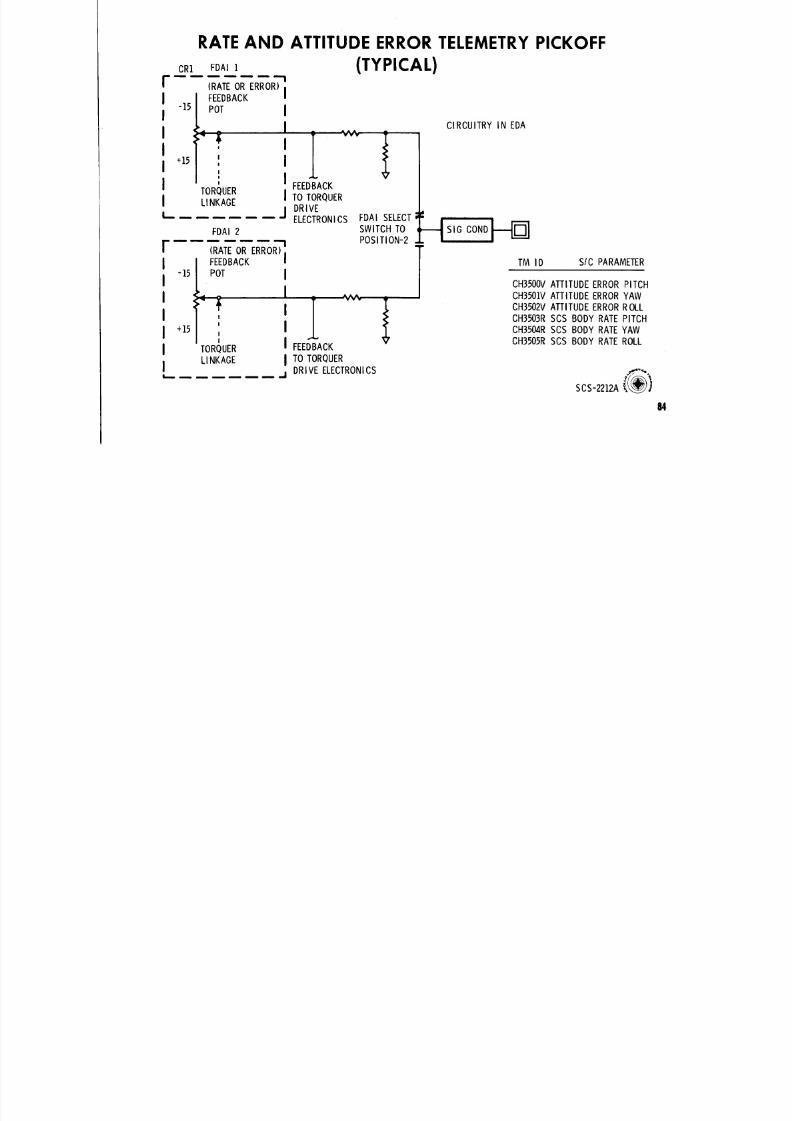
RAT EAND ATTITUDEERRORT ELEMETRYPICKOFFCR1FDAI1 (TYPICAL)
IF-- I -; o -E o "lFEEDBACK I
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 88/148
IF-- I_-;_o_ -E_o_, l,FEEDBACK I
-15 POT I
I __ I CIRCUI TRYIN EDA
Ii +15l : I
:_ j oR,_ _
...... ELECTRONICSFDAISELECT
FDAI SWITCHTO SIGCONDPOSITION-2
TI FEE DBACK I TM ID S I C PARAMETER
P O T,,!AII _ CH3501VATTITUDE ERRORYAW
C H3502V AT TIT UDE ER RO R R OL L
II CH3503R csBODYRATEITCH
15 CH3504 RSCS BODY RA TE YAW
I TORQUER FEE CK CH3505RSCS BODY RATE ROLLLINKAGE I TO TORQUER
L ...... .I DRIVEELECTRONICS
SCS-2212A_ , _,_
a 4
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 89/148
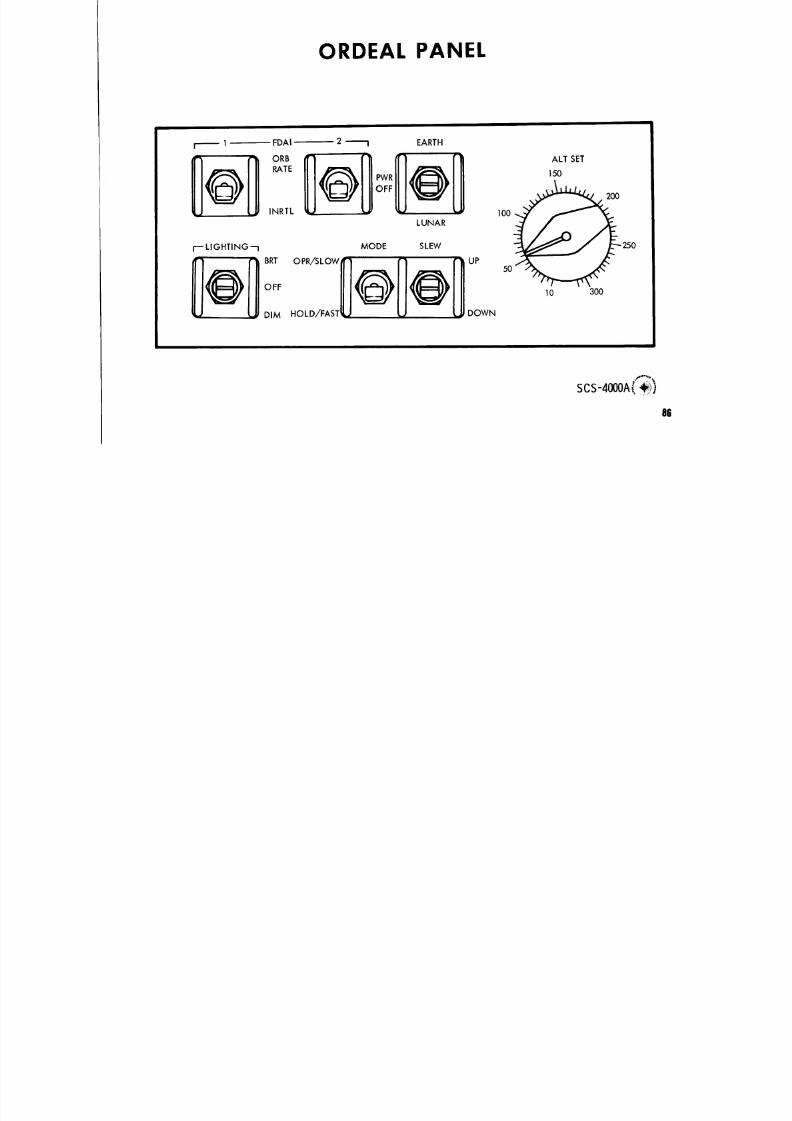
ORD EAL PANEL
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 90/148
I 1 FD AI 2 i EART H
ILl l.._I INRTL _.,J J ) L,,.J 100 . 200
MODE SLEW _25 0LIGHTING'_ BR T O PR /SLOWjT1 UP 5 0
DIM HOLD/FAST_U q DOWN
v,_ °_ _t
SCS-4000A{'_)
8 6
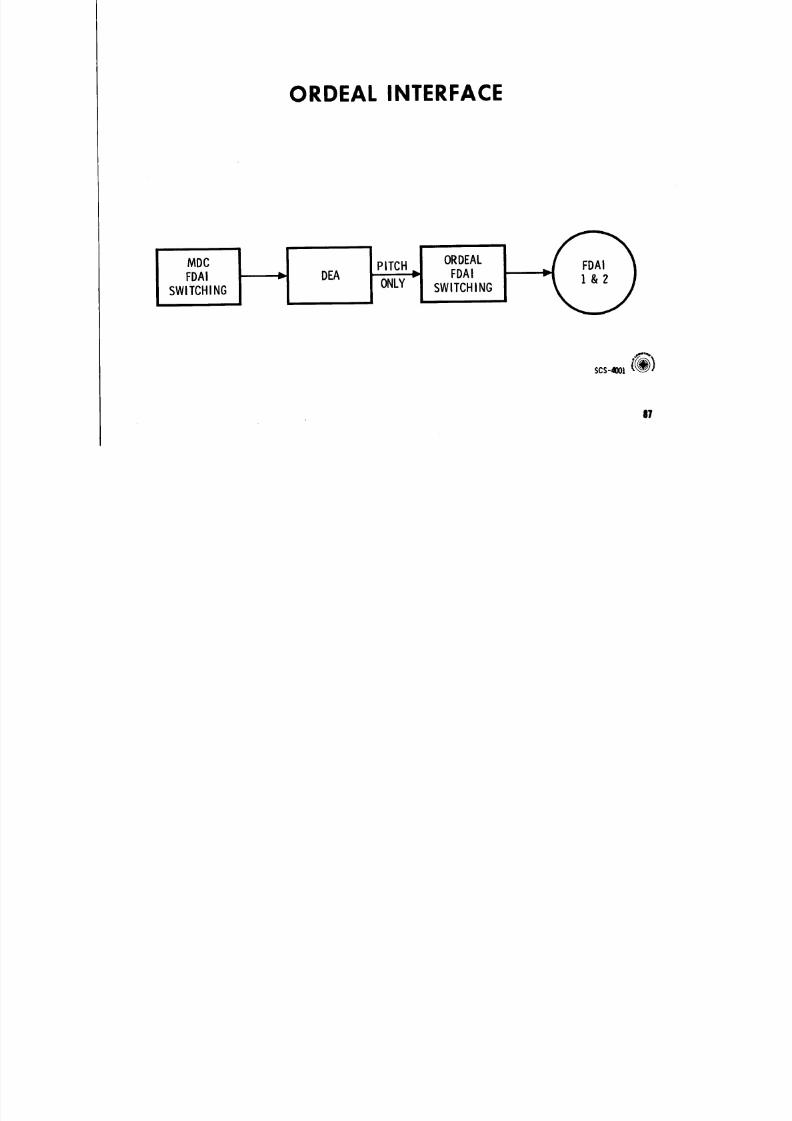
ORD EAL INTERFAC E
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 91/148
Moc] IP,TcHIOODAI _ DEA _ FDA! " 1 & 2SWITCHING O NLY S WITCHING
1 1 7
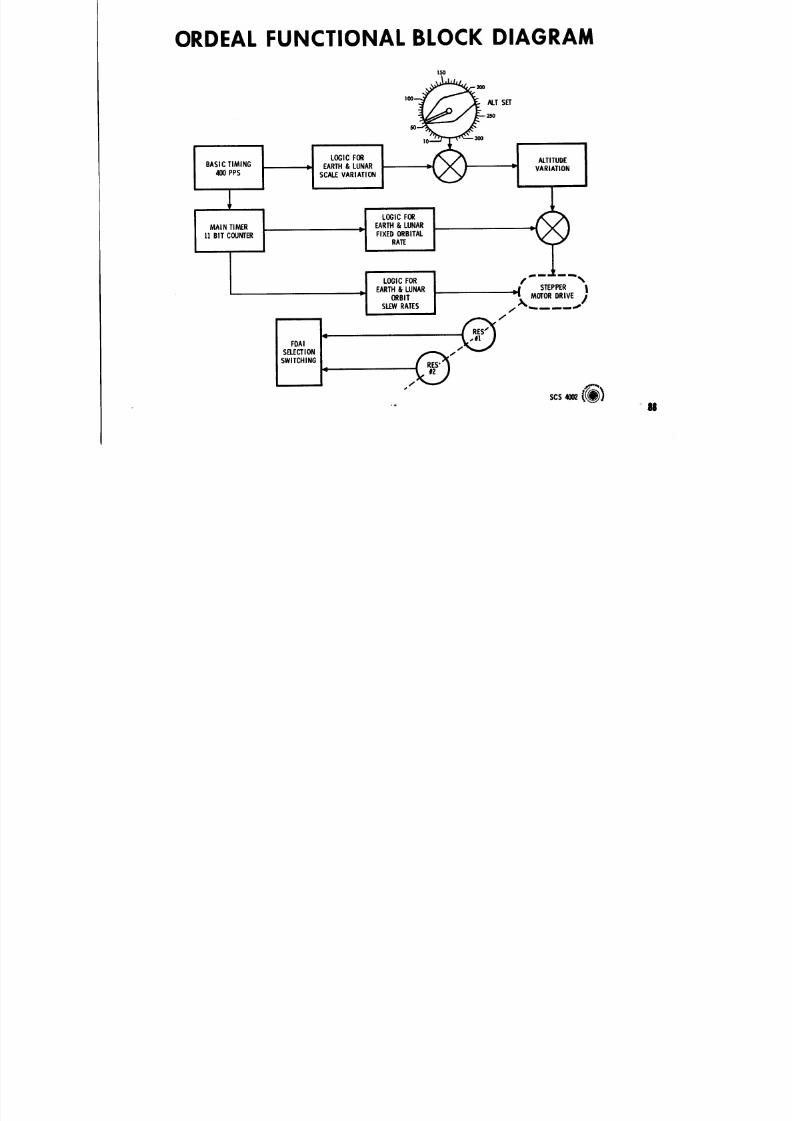
ORDEAL FUNC TIONAL B LOC K DIAG RAM1 5 0
too ALTSET
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 92/148
too ALTSET
BASICTIMING ALTITUDE400PPS -'- VARIATION
1
I LOGICFOR
MAINTIMER .._ EART H&LUNAR]1BITCOUNTER FIXEDORBITALRA E
LOGICOR %
I _/ STEPPER
EARTHo _B,TLUNAR -: MOTORRIVESLEWRA TES / / "_,,.,. _,...... _
FO ,1 .eELECTON _-_. /S W I T C H I N G
I- /SCS4002
•_ .b88
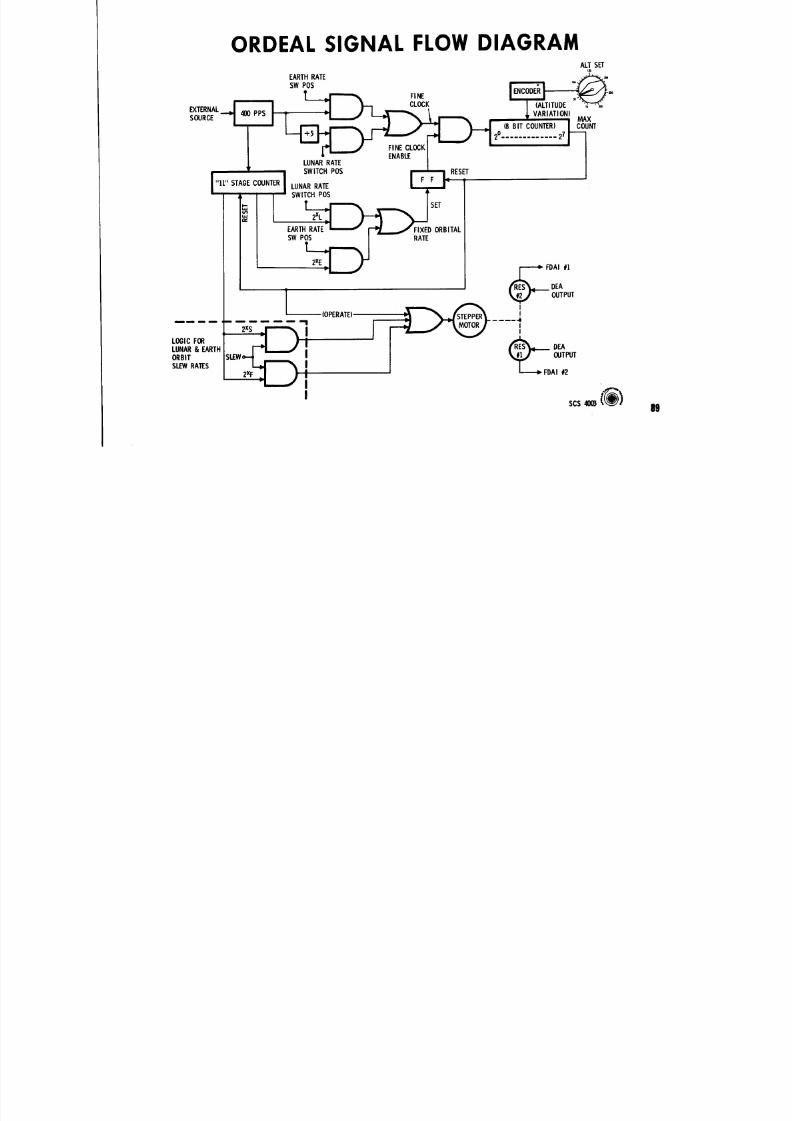
ORDEAL SIG NAL FLOW DIAG RAMALT SET
I S D
EARTHRATE " T
SW P0S _ .'® =
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 93/148
EARTHRATE _"r _T ,o _==
_ _ FINE
_,_ 20 (8 BIT COUN _R) COUNT
............. 27
ENABLELUNAR RATE
"11 " STAGECOUNTER LUNARRATE F | _SWITCHPOS
ZXLEARTHRATE ORBITALSWPOS RATE
2XE z,, FDAI1
DEAOUTPUT
in I I I I I I m i I _ t
LUNAR EARTH DEA
SLEW RATES
/ 2XF _,,_. FOAl ,2
]6 9
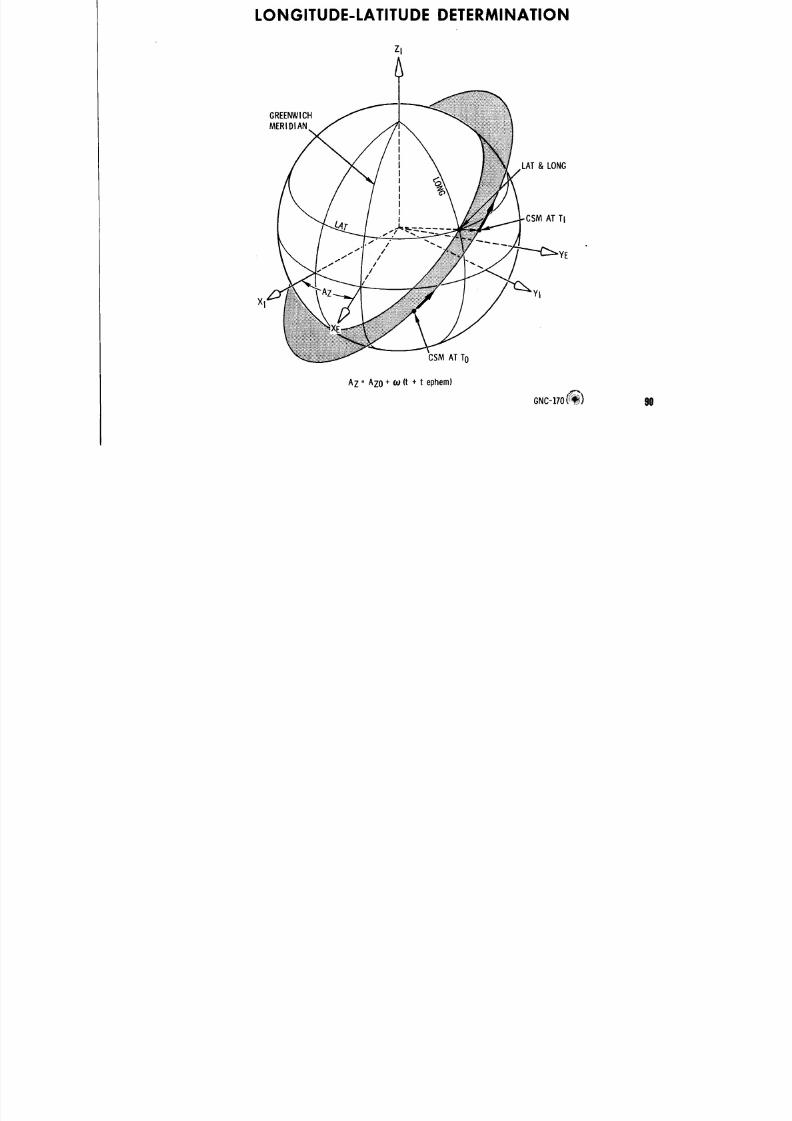
LONG ITUDE-LATITUDE DETERM INATION
Z I
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 94/148
GREENW CH
MERIDIAN,,
II
I LAT & LONGIIIIIIj .C SM AT TI
CS M AT TO
AZ-- AZO+ (o (t + t e phem)
GNC'I / O{ C_)) S O
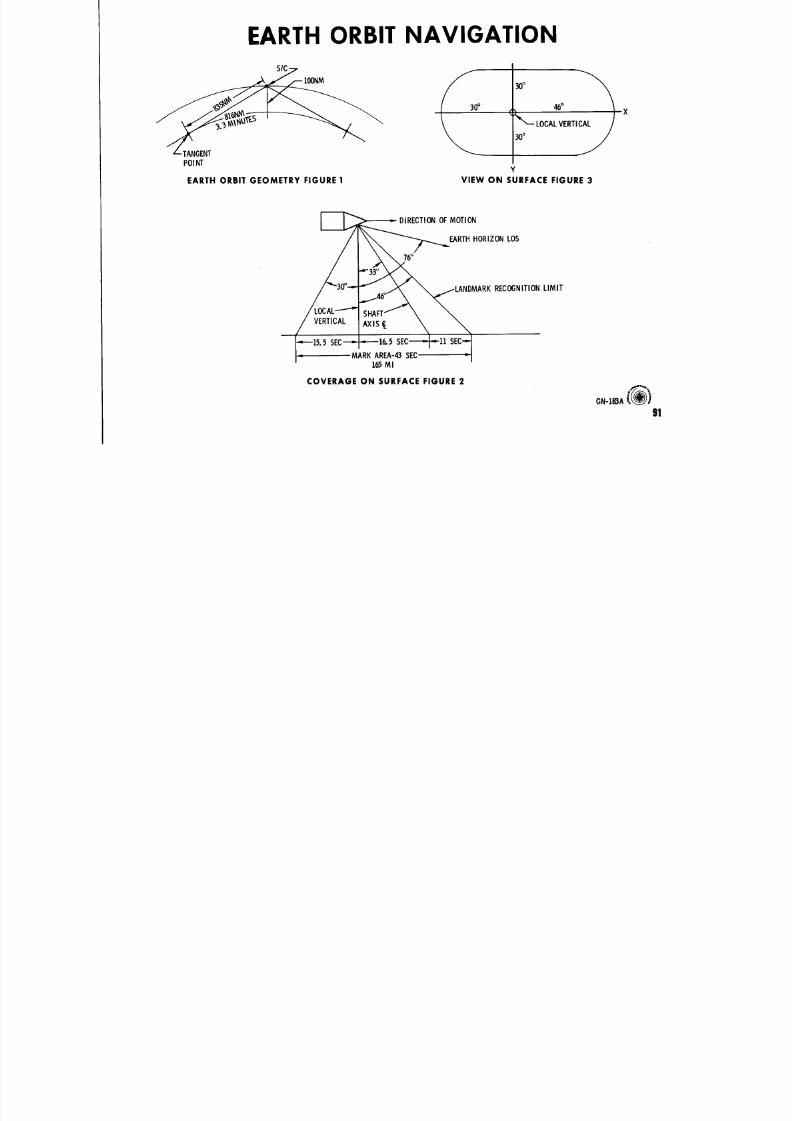
EARTH ORBIT NAVIGATION
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 95/148
30° 46° X
LOCALVERTI
_--TANGENT J30°01NTY
EARTH ORBI T GEOMETRY FIGURE I VIEW ON SURFAC E FIGURE 3
I _ > _ DIRECTIONOFMOTION
/ _-,x_6°/_-3e- --/__ \ _LANDNIARKECOGNmONNLIT
/ LOCAL'-""" SHAFT/ _
_.--_,. ,Ec_ • _.__EC---_.EC_MARK AREA-4 ) SEC " i165Nil
COVERAGE ON SURFACE FIGURE 2
91
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 96/148
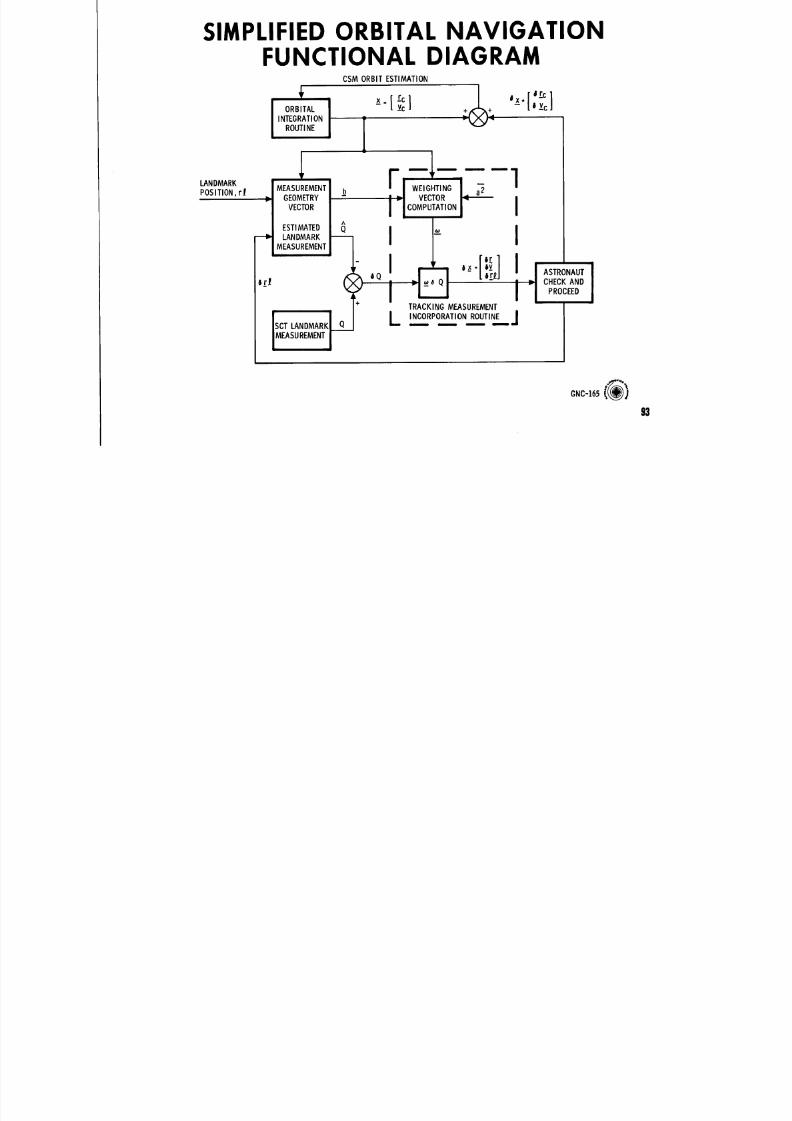
SIM PLIFIED ORBITAL NAVIGATIONFUNC TIONAL DIAG RAM
C SM O R BI T EST IMAT IO N
1 16Z
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 97/148
x 1 ,_ - 16re_c_ Z +... -
[ ORBITAL !
I N T E G R AT I O N
R O U T I N E
LANDMARK MEAS UREME NTb
POSITION, r, _ GEO METR YvEcTOR i "_ COVPE_O RIN
LANDMARKMEASUREMENT
7,oL- o l L6r_J "_ CHECKANDROCEE D
TRACKI BGMEASUREME NT
I INCORPORATIONOUTI NE JCTLA NDMARK "'" _ _ ""
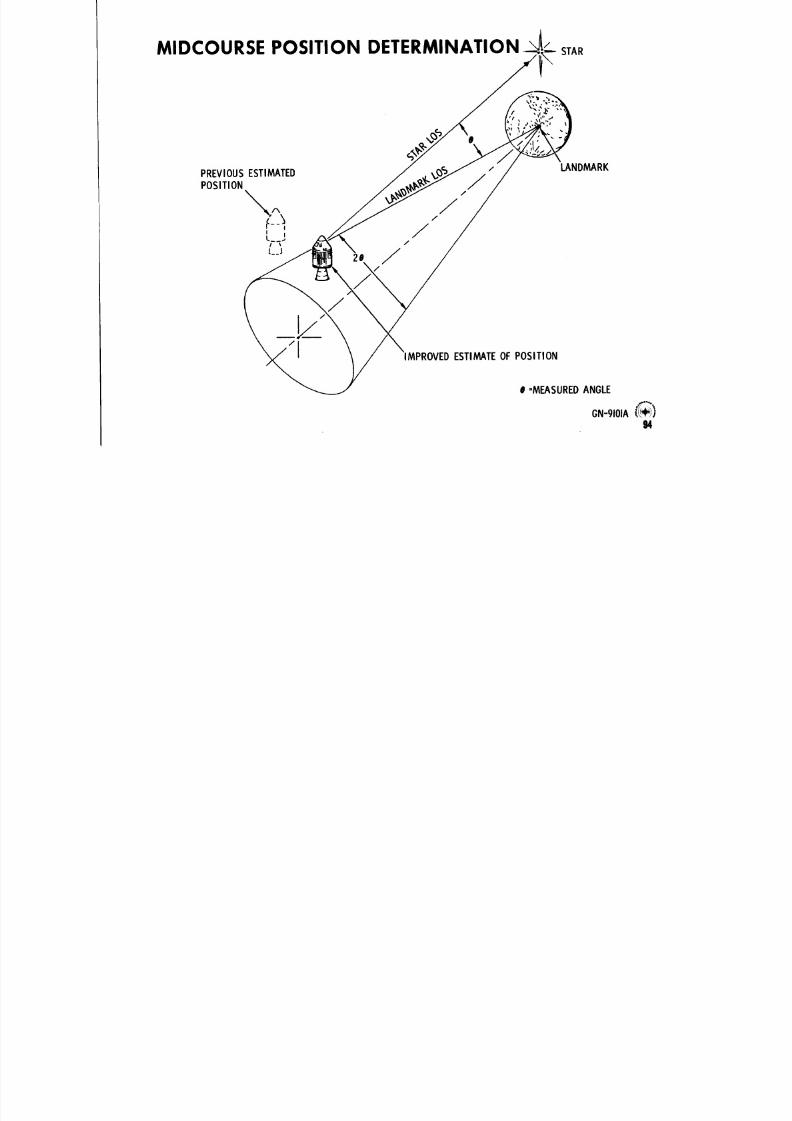
MIDCOURS E POSITION DET ERMINATION--.___ .-TAR
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 98/148
#
PREVIOUSESTIMATED / LANDMARKPOSITION /
A /F--_ /
L__; /L_J 2 # /
/
/I IMPROVEDESTIMAT EOFPOSI TION
tt "MEASUREDA NGLE
GN-giOIA_÷1)94
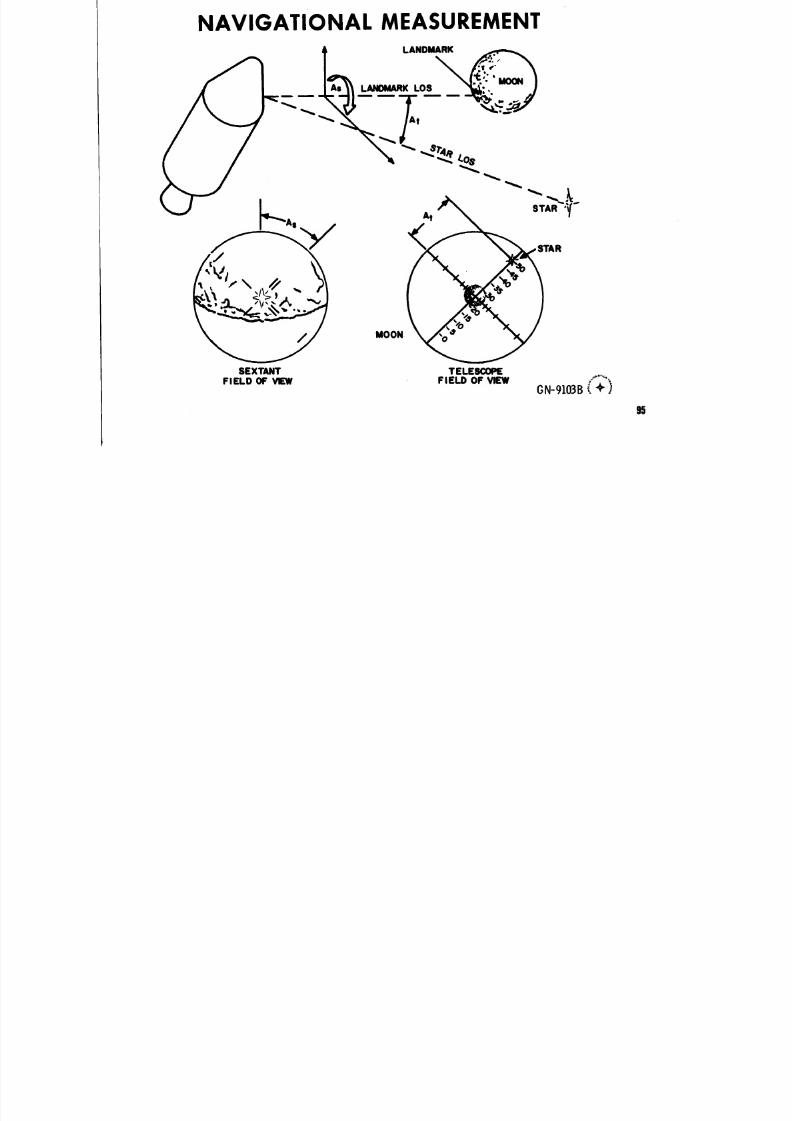
NAVIGATIONAL MEASUR EMENT
l LANDM__As LANDMARKLOS
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 99/148
STAR ,',f
A At _
M O O N
SEXTANT TELESCOPEFIELD OF VIEW FIELD OF VIEW f'"°_ ,
GN- 910 3 B__ )
9 5
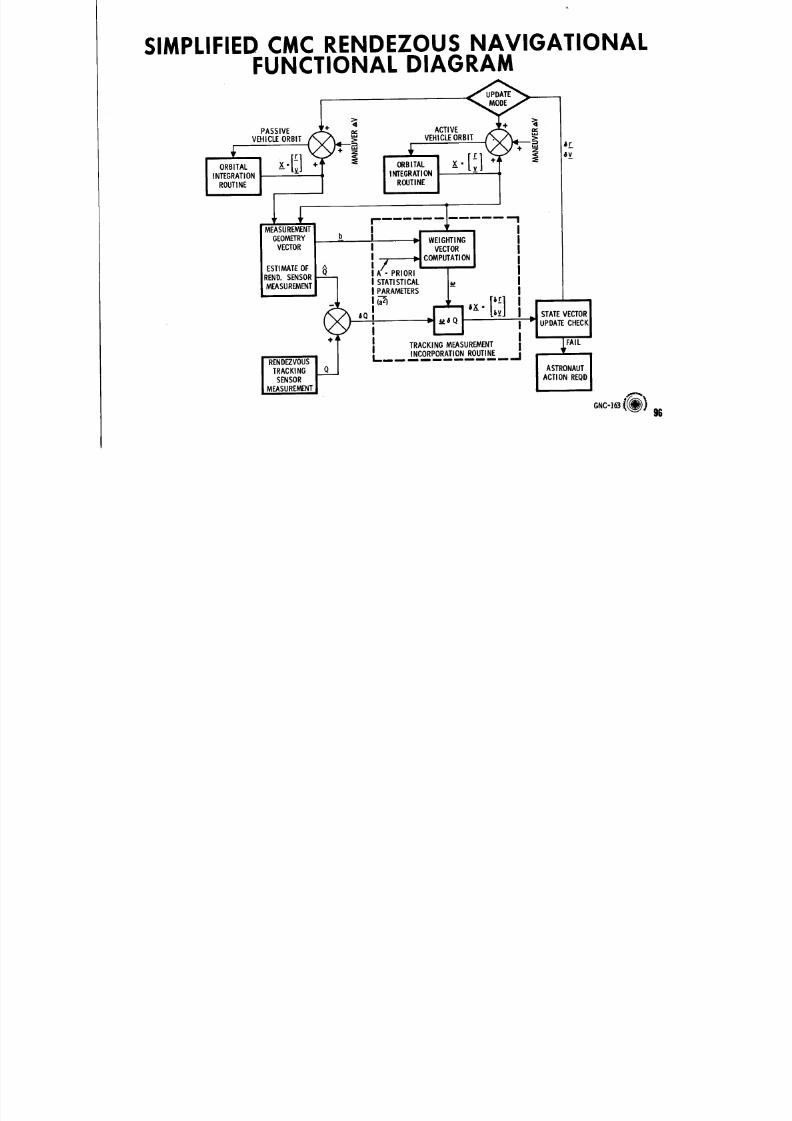
SIM PLIFIED C M C RENDEZOUS NAVIG ATIONAL
FUNCTION AL DIAGRAM
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 100/148
FUNCTION AL DIAGRAM
I ORBITAL X- - ÷ _ ORBITAL X - - +
r-...... ±..... _ " II MEASUREMENT . I _ I [I GEOMETRY _ L------d W EIGmING i II v_o ,- l___ _J< v_O_,o_lII _STt_TEOF ! / _ i I
, I _ ¢ . ,. Ibcl I , I ,4 I .I,72"!< b,,Ji Js,,,,_ c ,.I
I RENDEZVOUS I .......... I /I TRACKING I AS TRONAUTI SENSOR I ACT IONEQDIJMEASUREMENT | I
0NC - 1 6 3( ' _) ' 6
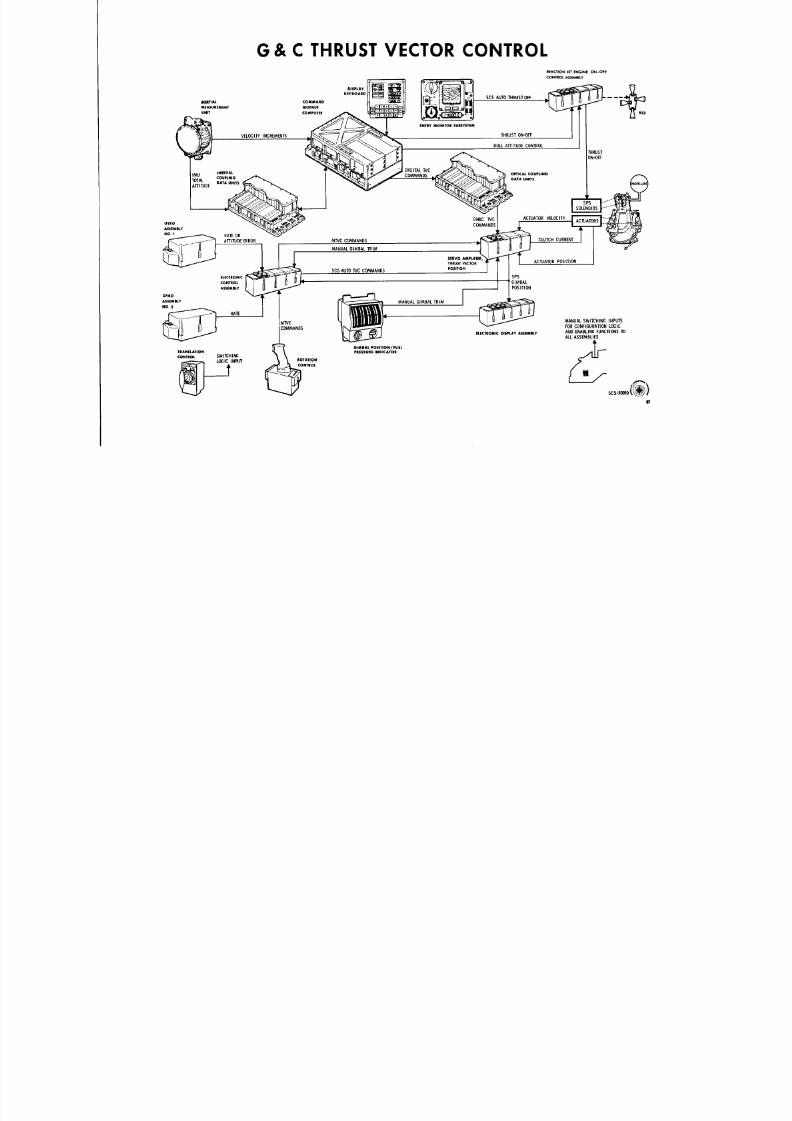
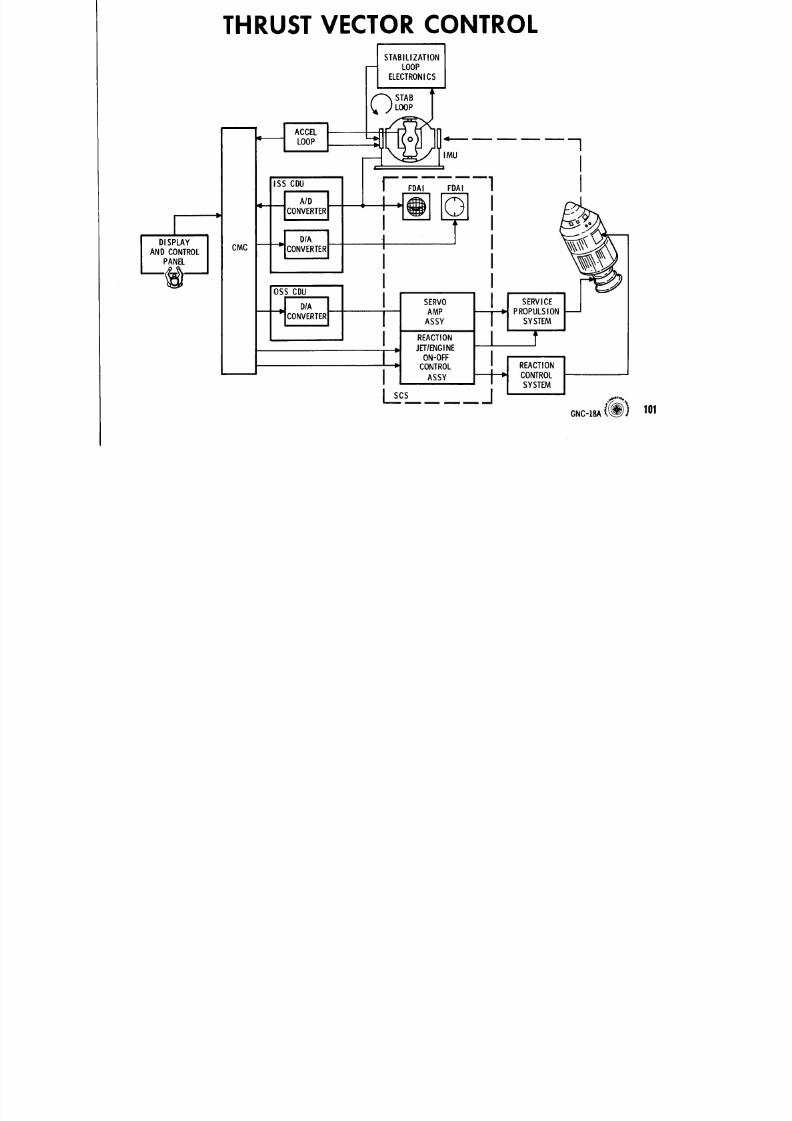
G & C TH RUST VEC TOR C ONTROLREACT IONETENGINEO N-OFFCONTROL SSE MBLY
INmTIAL COMMANDMEASU REMENT MODULE " "UNIT COMPUTER
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 101/148
,.,...o .,o. ,u,ELOCITYNCRE MENTS THRUSTON-OFF
ROLLATTITUDECONTROl.
__o THRUST
ON-OFF
INERTIAL D_GTALIVC
I .MUTOTAL AI._I_j DE COU PLINODATA__UNITS. COMMANDS " _ P'IrlC ALOU'LINO.jTA UNITS
GN&C TVC ACTUATORELOCITY
OYRO _i_ COM MANDSS S E M B LY
NO.I R ATEO R
ATTITUDERROR M' NC COMMANDS CLUTCHCURRENT
M A N U A L G I M B A L T R IM
_4 ACTUATOR POSITI ON
SCSAUTOIVCCO MMANDS
ELECTItONIC SPSCONTROL GIMRALASSEMBLY P OSTION
ASSEMBLY MA NUALGIMBALTRIMN O. 2
@ RAN
IIVC MANUAL SVd TCHINGINP UTSCOMMANDS FORC ONFIGURATIONOG IC
ELECTRO NICISPL AYASSE MBLY ANDE NABLINGUNCTIONS OALLASS EMBLIES
OIMBALPOSITION /FUEL
TllANELATION P |ESSURENDICATO RCONTROL S WITCHING
NTROL
scs. . o{_)I1 7
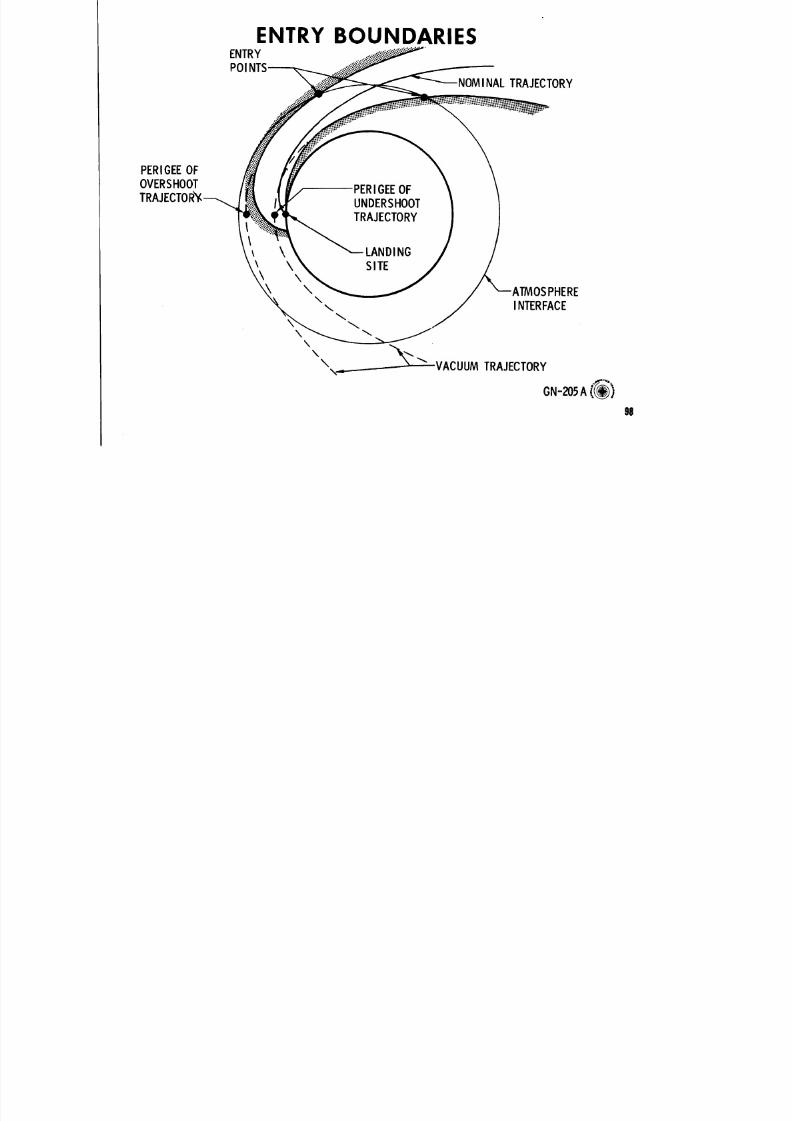
ENTRY B O UNDARIESENTRYPO
-- NOMINALTRAJECTORY
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 102/148
PERIGEEOF
OVERSHOOT PERGEEOFTRAJECTORY , UNDERSHOOT
TRAJECTORY
X, -- LANDING\ \ SITE\ \
\ --ATMOS PHE RE\
\ INTERFACE
, -,,. _" VA CUUMTRAJE CTORY\-=
GN -2O S A_)
9 8
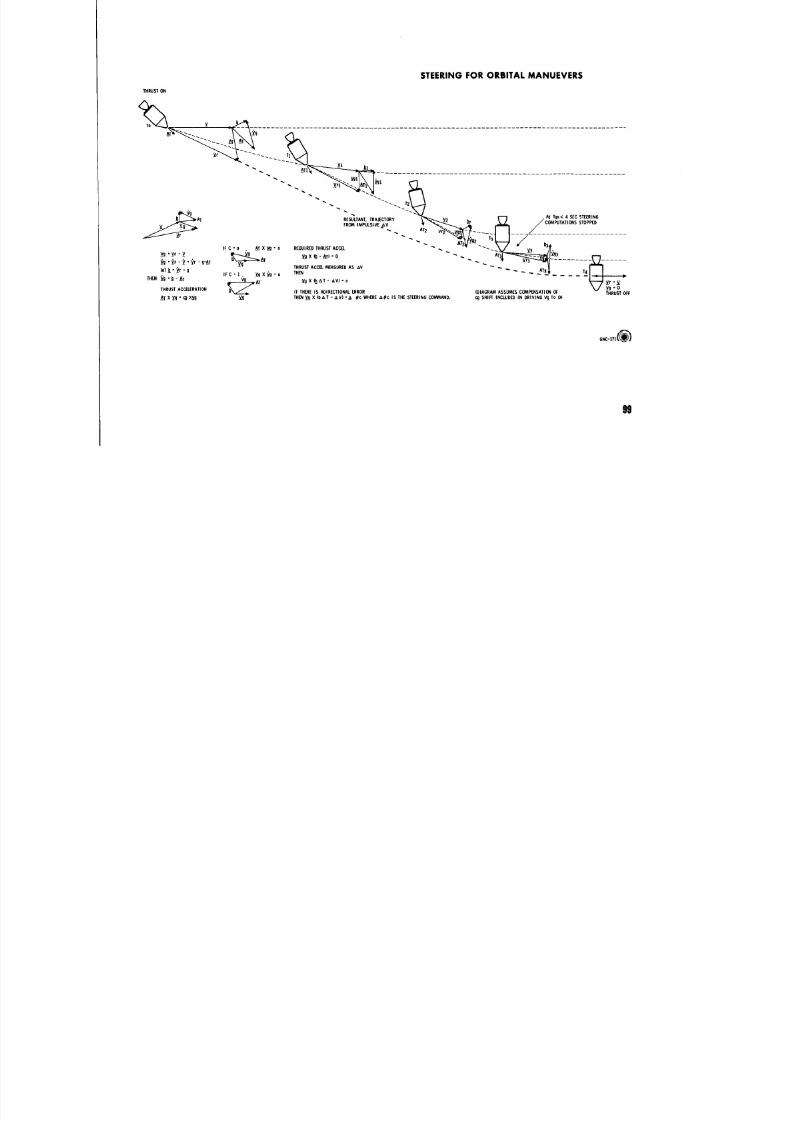
ST EERING FOR ORBITAL MANU EVERS
THRUS TOH
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 103/148
,o'_ _ _ . _._- '_............................. ..........................................................
*%
-... __ ,_,, _Vg "" _ ATT 9o< 4 S EC STEERING
_.,_ AT RESUL TANT,RAJE CTORy_1 /" Vn_"_. FR OMIMPULSIVE_.V • _-%._ _ _ mlm fm_ / ......................
"'--_ 2 '../.;---_; II --7,,,_:_ ......................IF C" o . _T X _g" o REQUIREDHRUSTACCEL - .. "*. "'. _// _g" V3 b-3 /_*--
Vg" _Vr- _V _. V9 X Ib- AT}" 0 _ -_ . AT 3_[ TM r'-'l
_:TbVr _r V 9 Yr 9AT "_g THRUSTACCEL MEAS UREDAS _V -.-v_ _r3 A_-T3 T _=_"- " IFC 1 V XVa THEN _ -- _ ..__'J# 4J _ [ ._
THEN * - . _g _. -o .......
THRUSTAC CELERA TION i_ _./ _(g-O_--f_- _ IF THERES ADIREC TIONALRROR (DIAGRAMASSUMESC OMPENSA TIONF THRUSTO FF
A_TX Vg • cb XVg Vg THENVg X Ib _. T -_,V) • ,', 8c WHERE_,#c IS THE STEERINGCOMMAND. cg S HIF TINCLUDEDN DRIVINGVg TOO}
9 9
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 104/148
TH RUST V EC TOR C ONTROLSTAB ILIZATION
LOOPELECTRO NCS
S TA B
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 105/148
t cc,,i _ _I LOO P --1
,ssc °u I F ';; ,,,7-;D,- T--] I_-|CONVERTER
I _jo,,,.g,,c_o._ Yo,Mc -IC°"V_"E" IN i i
._ l__ jOS CDU II SERV O SERV CED/A AMP PROPULSION-
I-Ic°.w._,I ASSY SYS TEMI REACTIONJET /ENGINE
i1_ ON-OFF
CONTROL R EACTIONASSY CONTROL
SYSTEM
I _c_-- ----J (_ ,o,NC-ZSA
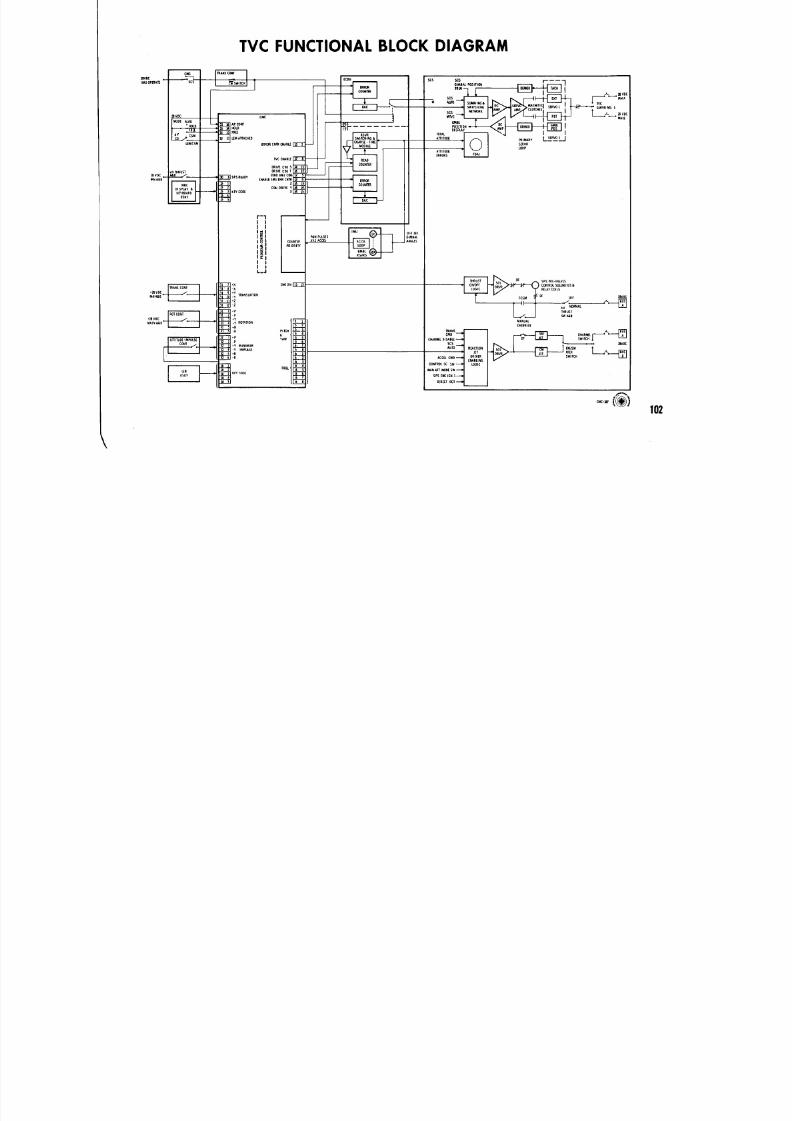
TVC FUNC TIONAL B LOC K DIAG RAM
c.cgVOC : __IMUOP_A_ SCS _ $¢S $C S _ -- -- -I
GIMBALPOSIT ION _ I r_'l lJ
An I ? : WC
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 106/148
HOLO POS ITION - I
_g ., cs, TOT^L ImTUDE ,I ,'_ I _._Y L __LJ
I L[_CS _ ERR ORNIR_BLE -- SER VO
ERRORSTTIT UDE q _ J LOOPNC (t_gL( --
DRIVECDUSavTHRUST DRIVECDUT
VDC A&B _ ZEROMUMNA&B ENABLEMU( HRCNTR
DISPLA y& CD_DRIVEYKEYB OARD
DSKY
r-'lI II I
I_l _ _x
J P&NPLJLS[S MBALxYz ACCEL IDLES
I _ I too PI_i O.L
I IL..J
E_DN I11 • DRVR _" ._f CONTROLOL[NO_OSRELAYOILS4_
_y TRANSLATIO N FCSM DE EyE 2 J VOC
AV NORM AL1 1 4 R U S T
, swA&6+Y MANUAL. y ROTATIONJ OVERRIDE
P.,c . ,.__. _ , _. []- & CMD _ / CHANte L ' 'YAW CHANk(LISAD __ SWITCH
L1
AUTO_ REAC TION CMISMIMPULSEXFER ,
ACCELMO- DRI VER SWITCHENABLINGCON TR Ot C SW "- -4 L OG IC
ROLL MANA_ _ SW-_mSPS( t_ IGN1---_
OIRECTOT _
1 0 2
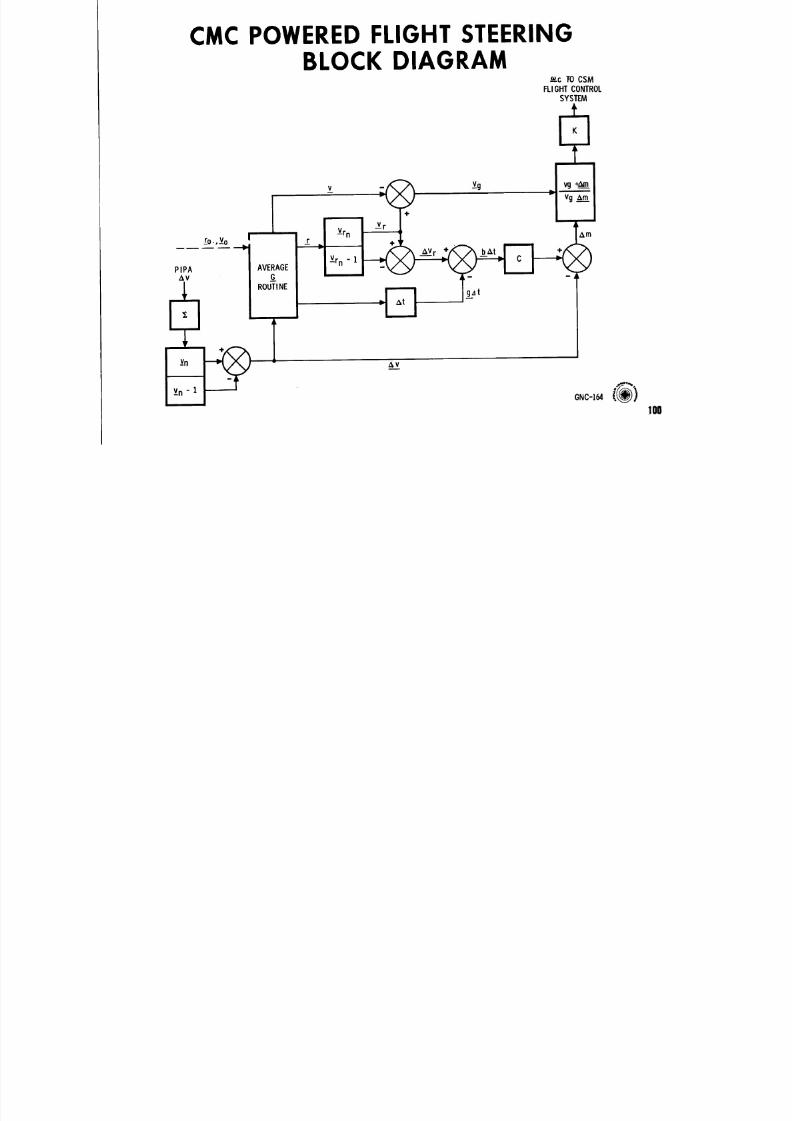
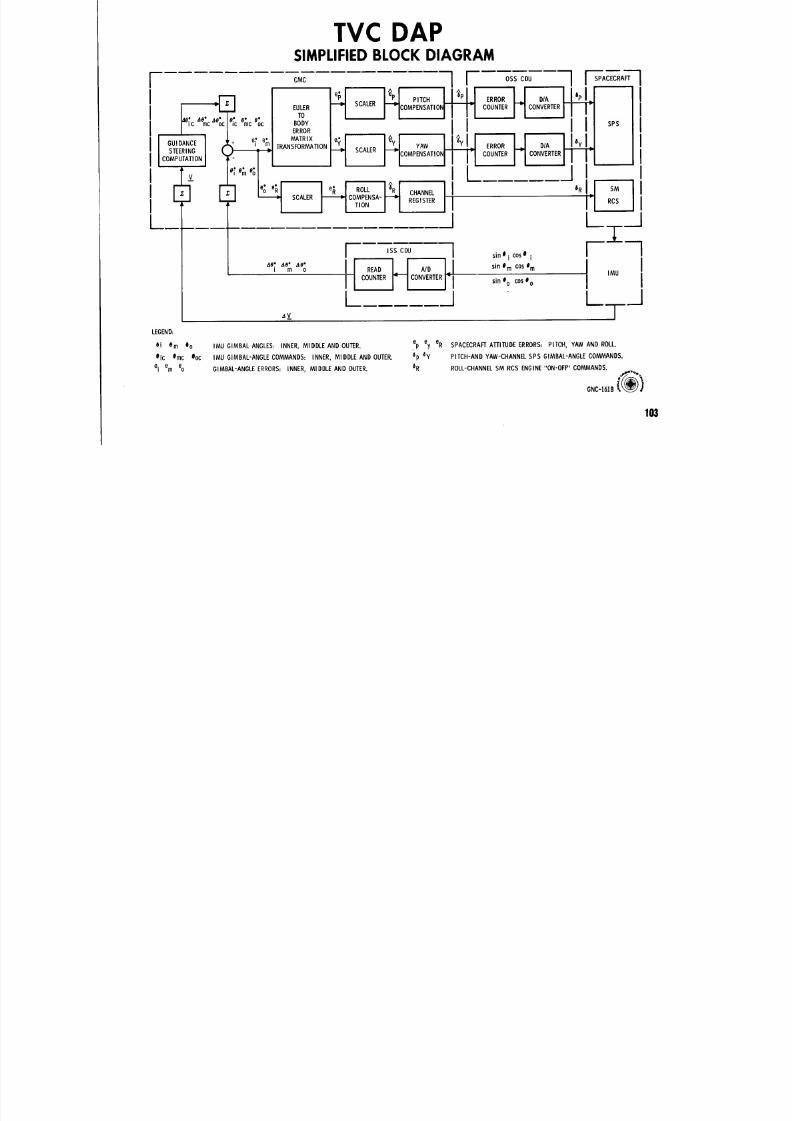
TVC DAPSIMP L IFIED BL O CK D IA GR A M
[ c_c o_coo 1 i _c_c --;,_,e" _ ERROR m DIA
I -_ _ _o^_ o_1 _.,c._ I-_ EULER1 .......--'Ic OMPENSAT' 01OUNTERONVER_ER I• • • • • • TO _ ; u =
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 107/148
I I / ERRORe* e * MATRIX e* _
GUIDANCE + i m Y Y YAW YI ERROR D /A _ I
I COMPUTAT 'O NI/I / I ICOMPENSAT'ONIIco '"'_"llC°"v_"'_"i_I
J r_V ' E 'm';/ : ; ;It ".,I iI"-'-' 1 I 1 T,o,,,I-I '_°_ *''I I1 RCSI I I I
I ,sscoo .,,, .,,,co s ,, I I
":"'"moREAoHA ,o '.O 'mCOS ,MOc°,.,,,-,-,:,,°,',v' :,,,_,,_'n'oS 'o II i _1
LEGEND:
ei em eo IMU GIMBALANGLES:NNER,M IDDLEANDOUTER. ep eye R SP ACECR AFTTTITUDERRORS:P ITCH,YAWANDROLL.OJ c em c Oo c IMUGIMBAL-ANGLEOMMANDS:NN ER,MIDDLEANDOUTER. 6p 6y PITCH- ANDYAW-CH ANNELPS G IMBAL-ANGLEOMMAN DS.
e i em eo GIMB AL-ANGLERRORS:NNER,MI DDLEANDOUTER. 6R ROLL-CHANNELMRCS ENGINEON-OFP'COMMANDS .
1 0 3
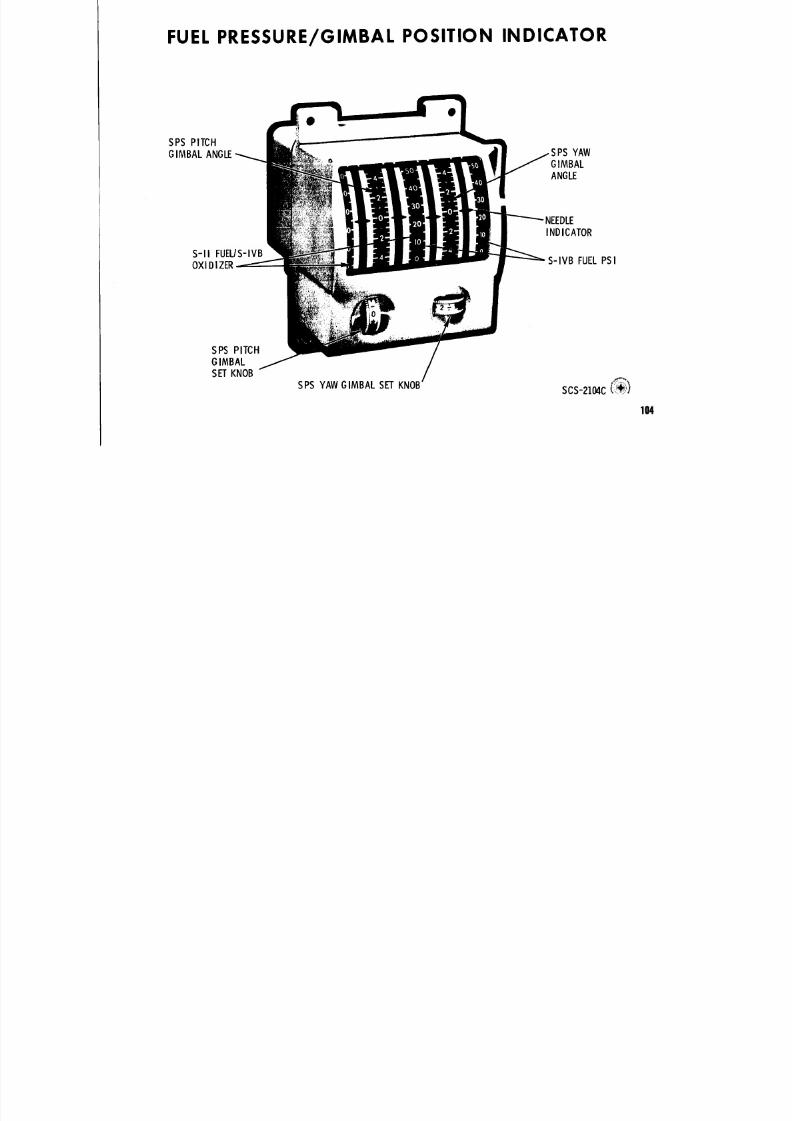
FUEL PR ESSUR E/GIMBAL POSITION INDICATOR
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 108/148
SPS P ITCHGIMBALANGLE SPS YAW
GIMBALANGLE
" NEED LEINDCATOR
S-II FUEUS-IVBOXIDIZER S -IVB FUELPSI
SPS P ITCHGIMBALSET KNOB
_'.SPS YAW GIMBAL SET KNOB SCS-2 1 04C_)
I @4
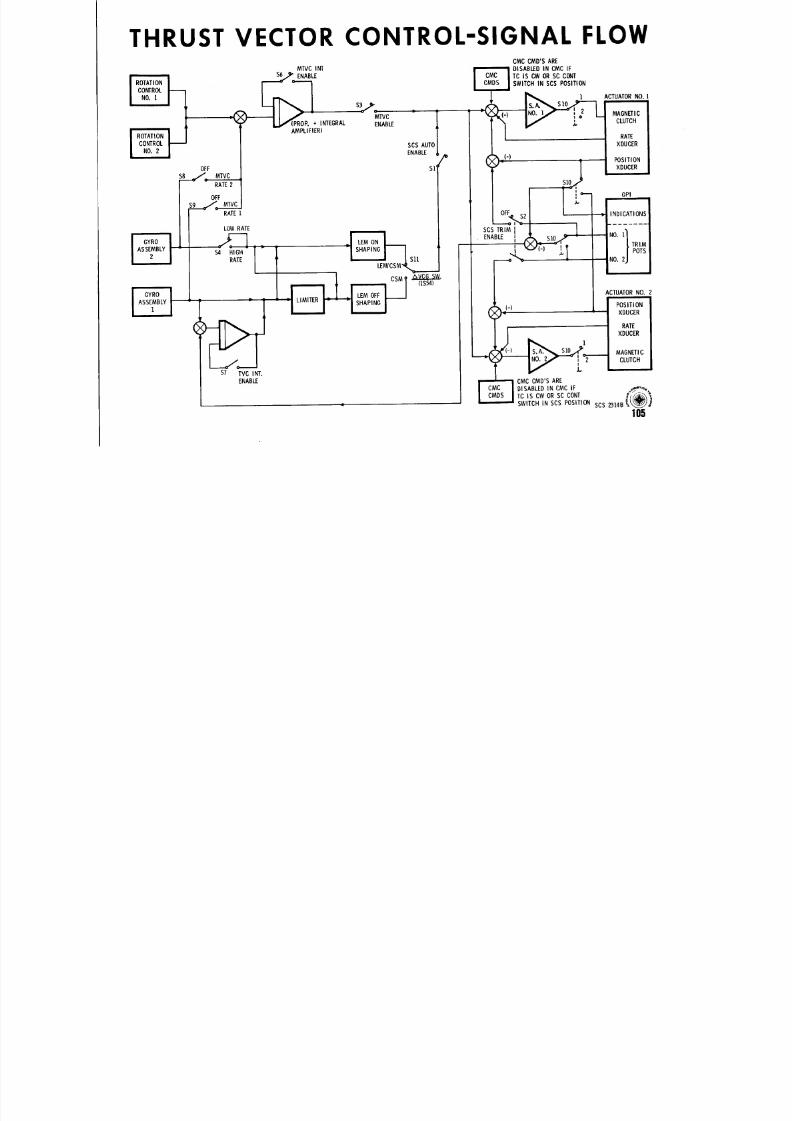
THRUST VEC TOR C ONTROL-SIG NAL FLOWCM C C MD 'S A R E
MTVCNT DISABLED NCMCF
S6_'a ENA BLE I CMC TC IS CW O R SC C ONT
I ROTATIONONTROL CMDS SWITCHIN SCS P OSITIONO. ] 1 ACTU ATORNO. ]
- MAGNETCMTVC _ CLUTCHP + I NTE GRAL ENABLE -
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 109/148
it -P. + I NTE GRAL ENABLE ._ -
I I AMPLIFIER)
ROTATIO N RATECONTROL SSAUTO XDUCER
NO. ENABLE_ POS I TI ON/OFF $I" XDUCER
$8 (_,,' / MTVCRATE2 SI 0
OFF GP I
$9 o.., ,f'o M TVCRATE INDICATIONS
LOWRATE SCS TRIM I .'1
; -_ SHAPINGI I ' LI POTS
" _l(. ) -
11S5 4 )
J GY RO I _ _ I LEM OF F __l a ACTUATOR NO"
ASSE MBLY '-_ : - - SHAPING I I POSITIONI I XDUCER
RA TEDUCER
MAGNETIC2 CLUTCH
S1 TVC INT.
ENABLE _C C q CMC CMD'S AREDI S ABLED I N CMC I F ,.,_" ' _o , .,TC IS C W OR SC CON T ._lfi_.l- •
. SWITCHINSCS PO SITIONSCS 2314B_ ._}J1 0 5
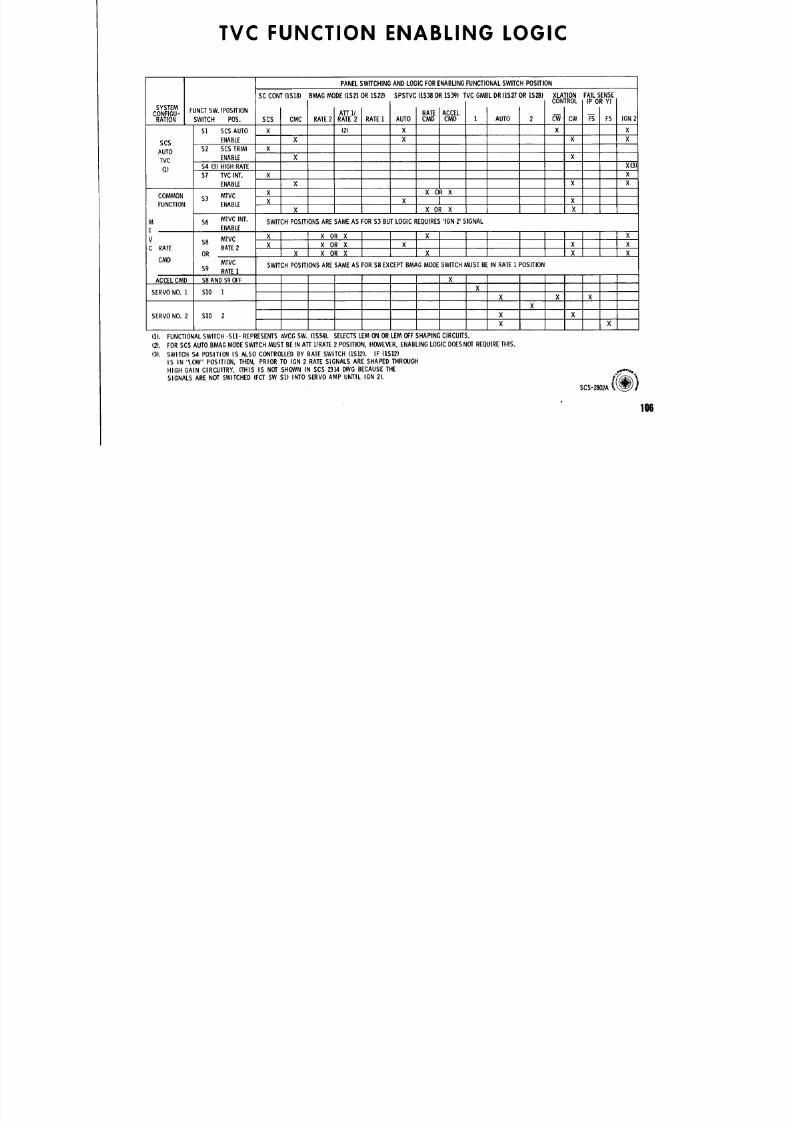
TVC FUNC TION ENAB LING LOG IC
PANELSWITCHINGNDLOGICFORENABLINGUNCTIONALWITCHPOSITION
SCCONT 1S 18) BMAGMODE1S21OR 1S22) SPSTVC 1S38OR1S39)TVCGMBLDR( lS27OR 1S 28) XLATIONFAILSENSE
SYST EM FUNCTSW ./PO SITIONCONFIGU - ATT1 1 RATE ACCEL
RAT I ON SWITCH POS. SCS C MC RATE2 RATEI AUTO C MD . C MD I AUTO 2 C W - FS FS I GN2
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 110/148
$ISCSUTO X (2) X X X
SCS ENAB LE X X X XAUTO $2 SCSTR IM XTVC ENABLE X X
( 1 ) $4 (3)HIGHRATE X(3)$ 7 TVCI NT. X X
ENABLE X X X
COMMON $3 MTVC X X OR XF UNCTI ON ENABLE X X J X
X XORX X
M $6 MTVCNT. SWITCHPO SITIONSR ES AMEASF OR$3 BUTL OGICREQUIRESIGN2' ;IGNALT ENABLE
V $8 MTVC X X OR. X X XIC RATE R ATE X X OR X X X X
OR X XORX X X X
CMD MTVC SWITCHPOSITIO NSRESAMEASFOR$8 EX CEPTM AGMODESWITCHMUST BEIN RATEPOSITION$9 R ATE
ACCELCMD $8 AND$9OFF X
SER VONO.I S I O I XX X X
X
SERVO O. SI02 X X
X X
I1). FUNCTIONALWITCHS ll- REPRESE NTS,VCGSW .(1S54 ).S ELECTSEMONORLEMO FFSH APINGCIRCUITS.
(2). FORSCSAUTOBMAGMO DESWIT CHMUSTBEINATT1IRATE POSIT ION,HOWEVER,NABLINGOGICDOESNOTRE QUIREHIS.(3). SWITCH$4 POSITIONS ALS OCONTROLLEDYRATESWITCH1S12). IF (1S1 2)
iS IN "LOW"PO SITION ,THEN,PRI ORTOI GN2 RATESIGNALSAR ESHAPEDHROU GHHIGHGAINCIRCU,TR Y.THIS IS NOTSHOWNN SCS2314DWGBECAUS EHE _e"_. ,.
SIGNALSARENOTSWITCHEDFC TSW$ 1)INTO SERVOAMP UNTILIGN2). (_('_--_'_SCS - 2 8 02A.
10 6
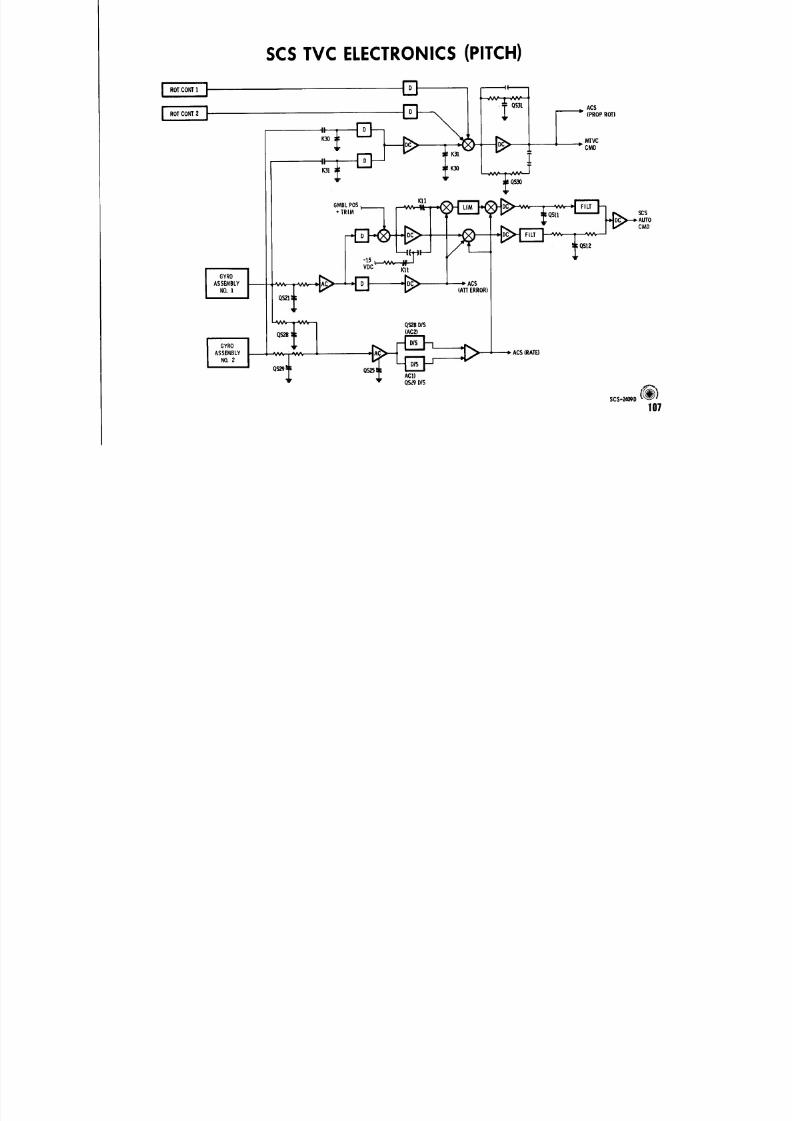
SC S TVC ELEC TRONIC S (PITC H )
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 111/148
; Q S 12
v_S c K.
I GYRO
ASSE MBLY ACSNO.I (A T[ERR OR)
QS28D IS(AC2)
GYROASS EMBLY ACSRA TE)NO.2
qS2 9| QS 25-'ACI)QS_ DIS
1 0 7
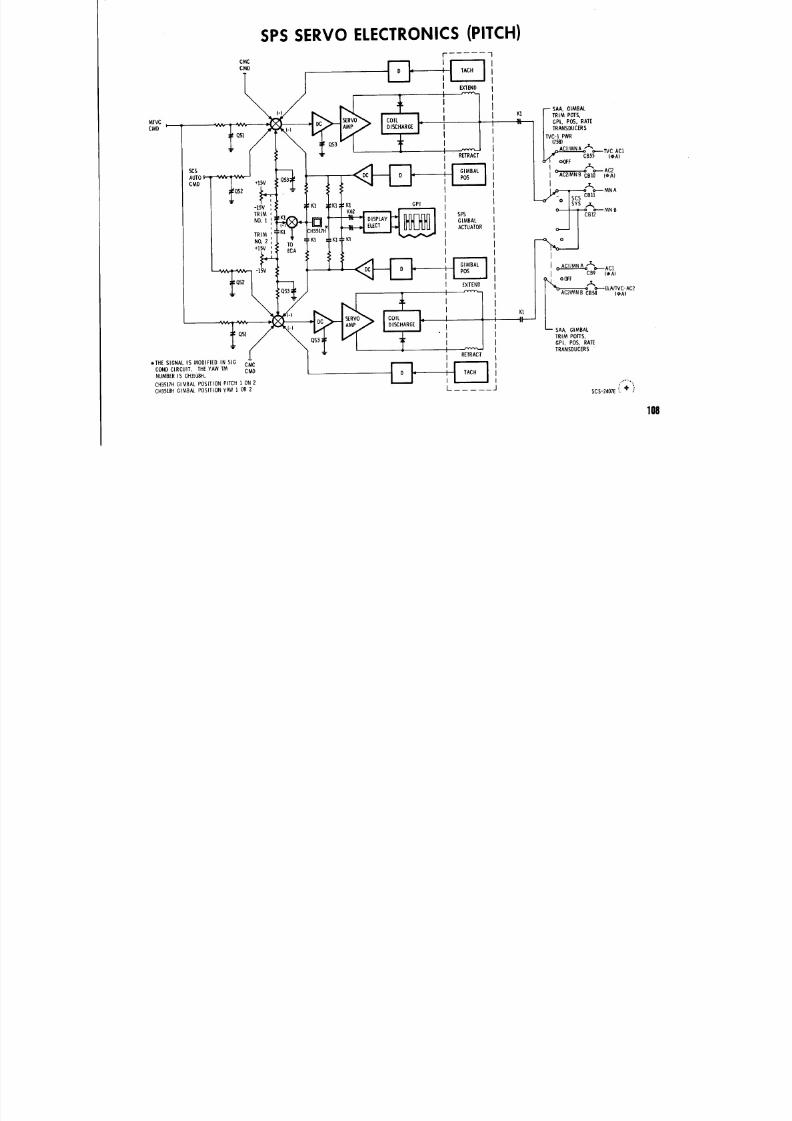
SPS SERVO ELEC TRO NIC S (PITC H )"1
-ii:MD I TACH
EXIEND
_IL r- SAA,GIMBAL
.Tvc co ,L L . /GP ,PosRATE
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 112/148
QS I I ITV C-IP WR
T l (Tss) , ..t,| _ACIIMNA_ o----TVC ACI
RETRACT u,/'U 0OF F C B55 (CA)
ACZIMN CBIO (¢ 'A)+lSV I
;' i . .. o ___ _ o_ o . . _ MN A
' ._, . z_scsB.- o. Lp .. y,L o _ o _,
-15V KK_6 GP ITRIM, _ J_J'J_ I SP SIMBAL CB12NO. 1 : __ -- _ ELECT I-m,I IIIII J lHI m ACTUATORTRIM ',l
o
+1_VO. 2 _K1 "--° _o ° l
E I
L _= _ J O ACI / M"A o " z _ e .--ClCB9 (CA)
_jK,j DOFFEXTEND J__ o ---E LA/ TV C- AC2
1_ _ _ (.. . AIII , ,i B54 (eA)
TRIM POleS,GPI, POS, RATE
"* _ TRANSDUCERS.T R ETRACT
*THE SIGNALI S MODIFIEDIN SIG CMC _
CONDCIRCUIT. THEYAWTM CMD J D _ i IUMBERS CH3 5 1 8 H.
CH3517H GIMBAL POSITION PIT CH I O N 2 / _"'" ,CH3 5 18 HGI MBAL POSITI ONy AW I OR 2 SCS-2407E _._ o)
I 0 8
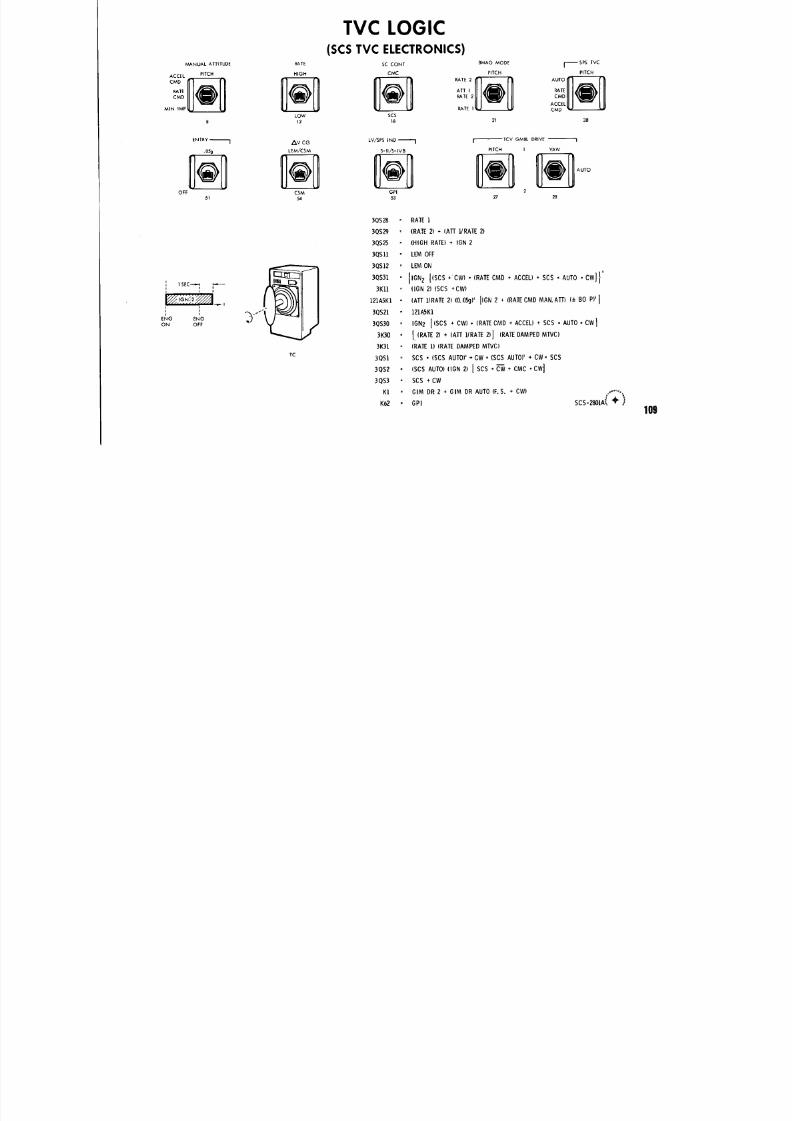
TVC LOG IC(S CS TVC ELE CTRON IC S)
MANUAL ATTITUDE RATE SC C ONT BMAG MODE J SP S TVC
ACCEL P ITCH HIGH CMC PITCH PITC H
MIN IMP RATE I CMD _ _LO W SCS
8 12 18 21 3 8
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 113/148
ENTRY I _V CG LV/SPS IND I I TCV GMBL DRIVE
,05g LEM/CSM S-II/S-IVB PITCH I YAW
OFF C SM GP I 251 5 4 53 27 28
3QS28 RATE I
3 QS29 ( RATE2) + ( ATTI / RATE2)
3 QS2 5 ( HIGH RATE) + I GN 2
3 QS11 LE M OFF
._ 3Q S 12 LEM ON
3 QS3 1 I_ IG N J ( SCS+ C W).(RA TE CMD + ACCEL)+ SCS. AUTO .c wJ]' . ,tISE C
'_ I ' 3 Kll (I GN2) ( SCS +C W)D I
i i
121A SK1 (ATTI / RATE2 ) (0 . 0 5 g)' I GN2 + ( RATECMD MAN. ATT ) ( + BOP)']/// .... , /////_ f
, , - -_ .-" 3 QS21 121ASKIENG E NG ,PON OF F 30S30 IG N2 J( S CS + C W) • (RATECM D + ACCEL ) + S CS • AUTO • C W]
3 K3 D [.(RATE2) + (AftI / RATE2)] (RATEDA MPED MTVC)
3 K3 1 (RATEI)( RATEDA MPED MTVC)
TC 3 QSI SCS • (SCS AUTO)'+ C W •(SCSAUTO)'+ C W" SCS
3 QS2 (SCS AUTO)(IGN 2 ) [ SCS " _ + C MC •C W]
3QS 3 SCS + CW
KI GIM DR 2 + G IM DR AUTO(F.S. + CW) f"'_._', )b 2 GP I S CS-2 8 0 1 AL
1 0 9
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 114/148
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 115/148
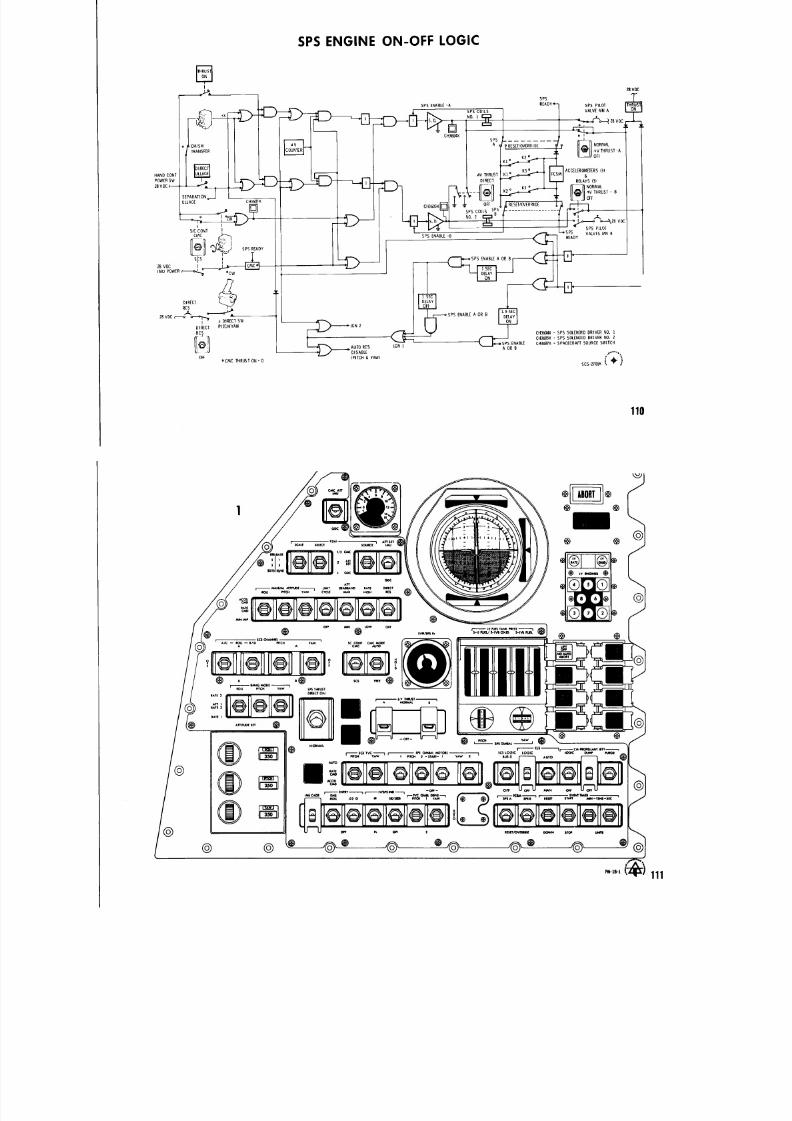
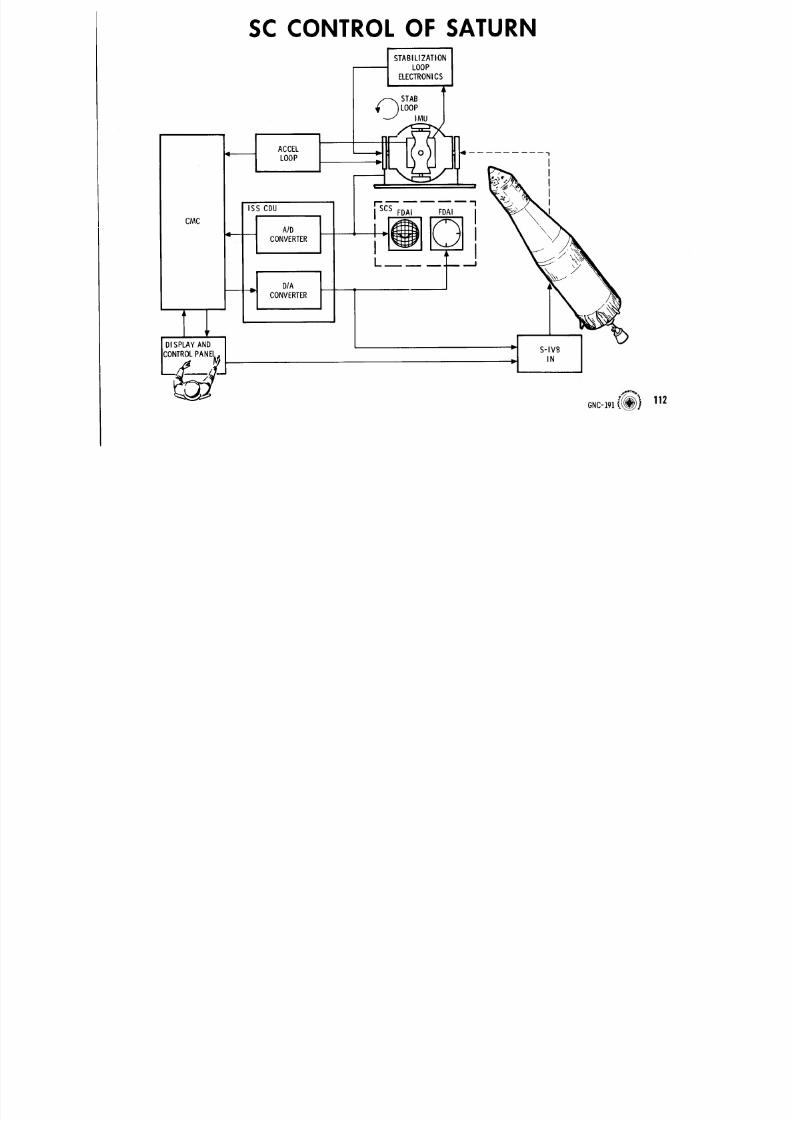
SC C ONTROL OF SATURNSTABILIZATION
L O O PELECTRONIS
_,,_ STABL O O P
IMU
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 116/148
, ._"__t I "l LOOP I I
, II
[ , ISS CDU SCS FDAI FDAI
A/D I \C O N V E RT E RI , IL ....
D/ACONVERTER
)I SP L AY A NDINTROL ANEL S-IVBIN
GNC-1 9 1C_) 112
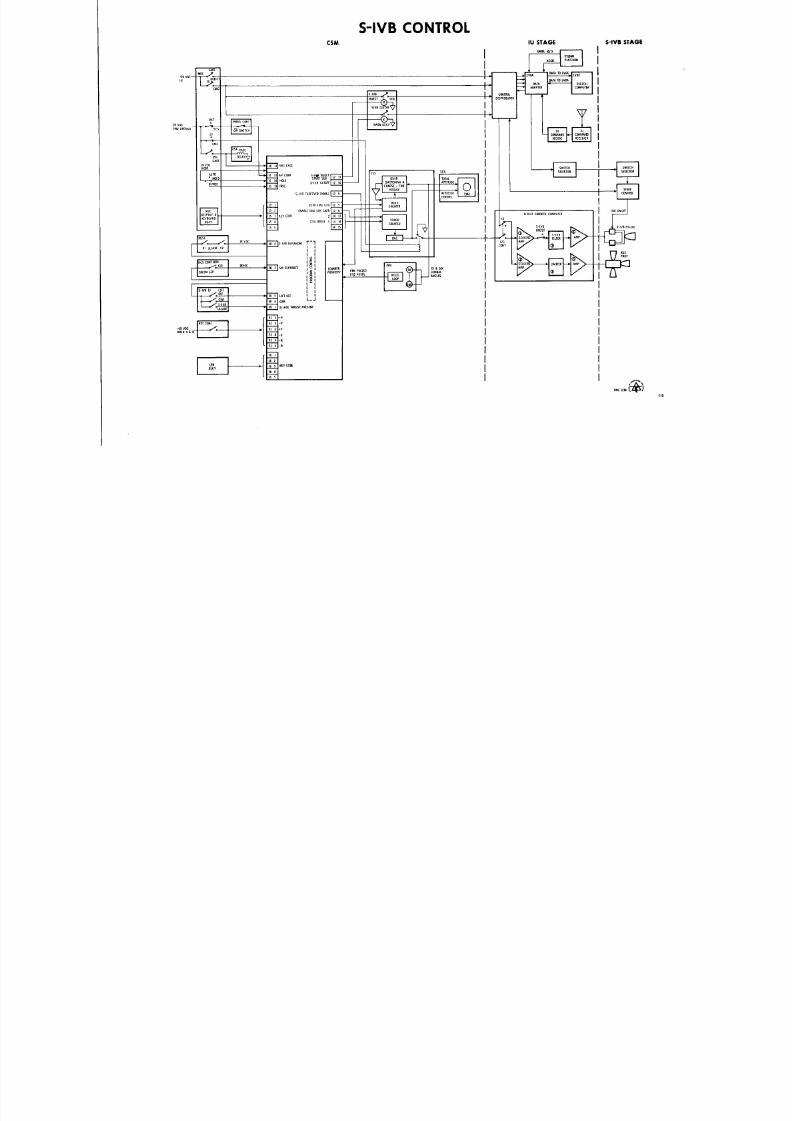
S-IVB C ONTROLCSM lUSTAGE S-IVBSTAGE
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 117/148
GNCZ3B ._'_11 3
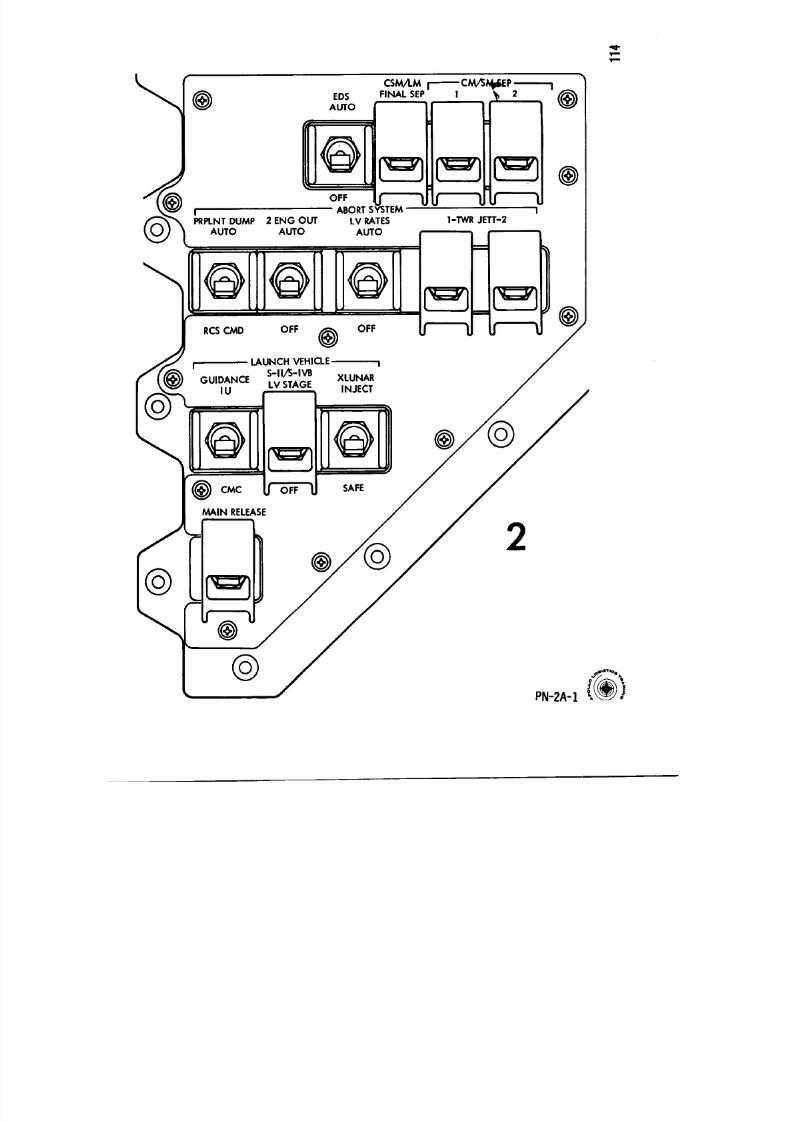
EDS FINAL SEP l 2AUTO
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 118/148
@PRPLNTUMP 2 ENGOUT LV RATES 1-TWRJETT-2 I
AUTO AUTO AUTO "--_ j
\ I]el[le[!le [l[,cs o,,e O ,F ei LAUNCHEHICLE !
S-II/'S -IVB XLUNARGUIDANCE LV STAGE
I U INJECT
@ @
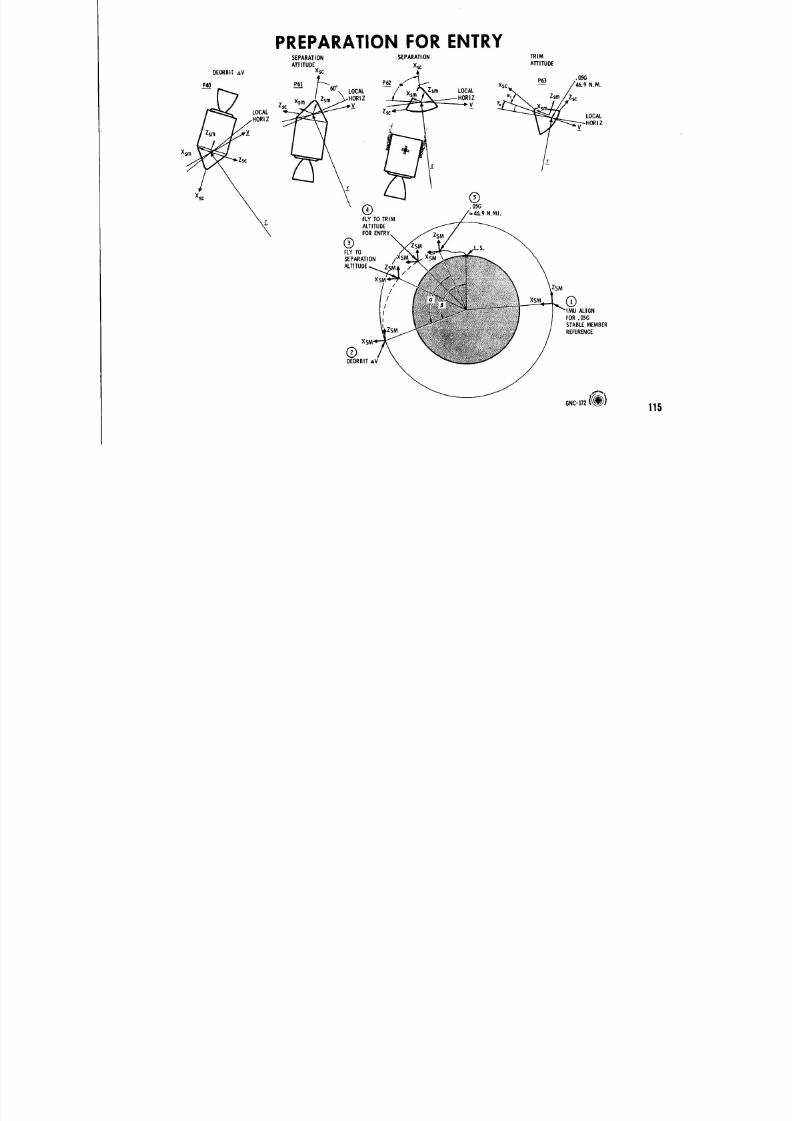
PR EPARATION FOR ENTRYSEPA RATON SEPAR ATiN TRIMATTITUDE X_ AI"I'ITUDE
X s cDEORBITV
__ P6I -- / v /_Zsm LOCAL
Xsn /OCAL Zsc " _ Zsm _'HvO RIZ _HORIZ
'r
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 119/148
XscN . M I .
®FLY TOS E PA R AT I O N
ZSM
(9A L I G N
FOR.0 5GSTABLE EMBERREFERENCE
®DEORBIT'-V
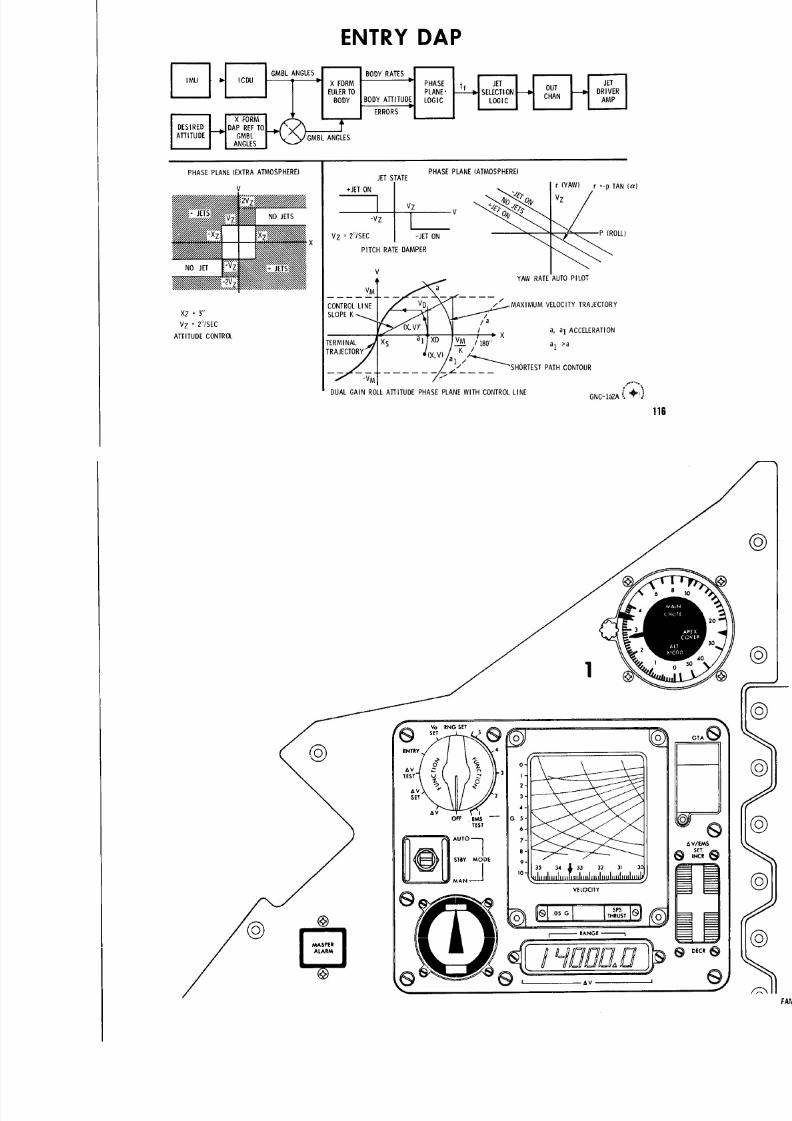
ENTRY DAP
n i i '° H IMo ,cou _ XE ORM "PHASE JET I JETEULERT O PLANE " _ SELECTION OUT DRIVERHA N
BoD YBODYATmTU DOG,C I LO_,CI AMPERR °RSDESIRE Di__b ,IDAP REF TO_ ..( ", t
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 120/148
I I I×F°RM I,<'_ATTITUDE "1 GMBL I " _,,." GMBLANGLESI I ANGLES /"
PHASE PL ANE(EXTRAATMOS PHERE) P HASE PLANE (AT MOSPHERE)J ET S TATE
r (YAW) r =-pTAN (_)
VZ : 2° I SEC - JETO N OLL )
x
NOET -"_ _÷ _ v
__ ____ ,____ r___ YAW RATEAUTOP ILOTM ....
CONTROLINE / VD,j._ I /_...-MAXIMUM VELOCITYTRAJECTORY
XZ=3I_ SLOPE_ /--'--_/C \L.IIFSATTITUDECONTROL a , aI ACCELERATION
1 80 o_ X
TERMINAL XS aq XD I VM / aI >a
TR_I I ' ( _ / __I ? I _''''_
.... SHORTESTATHCONTOUR
oy •
DUAL GAIN ROLL ATTITUDEPHASE PLANE WITH CONTROL LINE GNC-I,12A,_I_ ) ]
11 fi
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 121/148
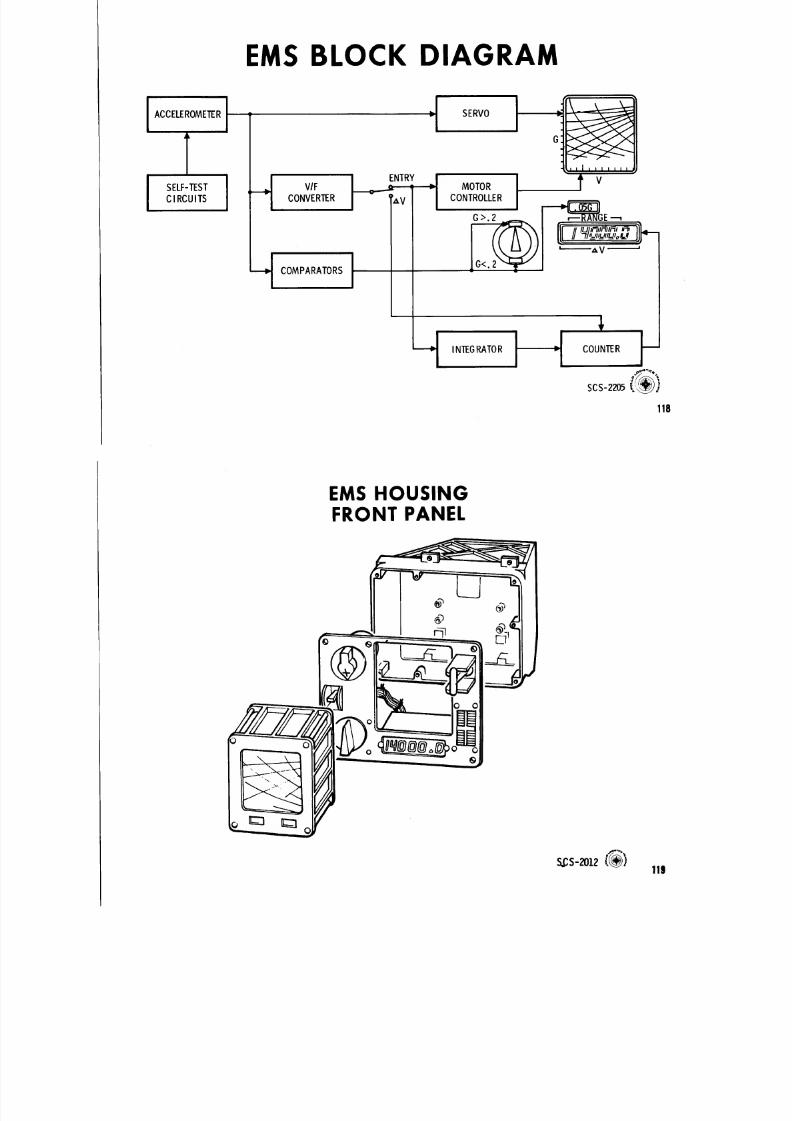
EM S B LOC K DIAG RAM
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 122/148
I A C C E tE iO M E Ri I.! I NTRYii vELF-TEST VIF - -_ MOTOR fCIRCUITS CONVERTER o -- "_V CONTROLLER
i
G>.2 "-'__ GE --,
' _V J
G<.
COMPARATORS
i
IN GRATOI COOlll'rc.l .
o_'_
SCS-2205" . _ . s_
1 1 8
EMS HOUSINGFRONT PAN EL
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 123/148
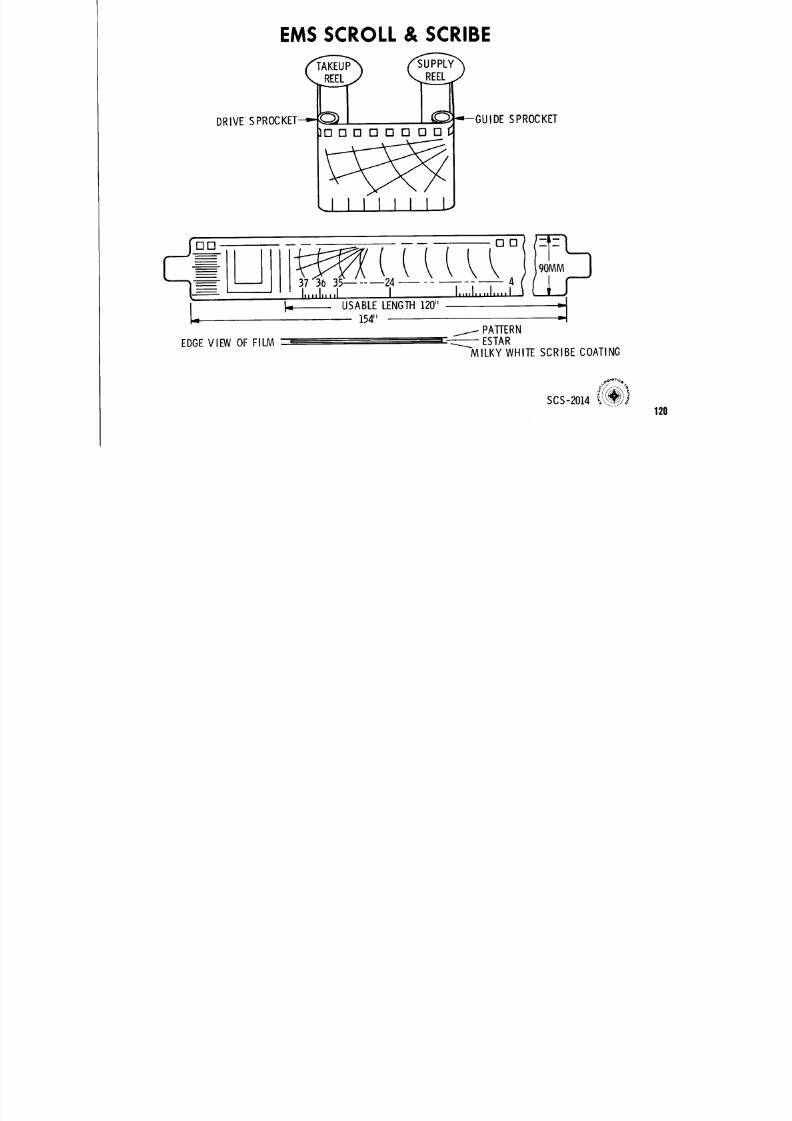
EMSSCROLL& SCRIB E
DRIVESPROCKET I I_I_--GUIDESPROCKET
DDDDDDDDI:
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 124/148
DDDDDDDDI
.I I I I I I I L
....2 4 --
I L_ USABLEENGTH 20" __I" i]154" -,PAT I ' E R N
EDGEIEWOFFILM , _ ESTARMIL KY WH IT E SCR IBE CO ATIN G
o.
J
SCS - 201412 0
m v A Um
j
g
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 125/148
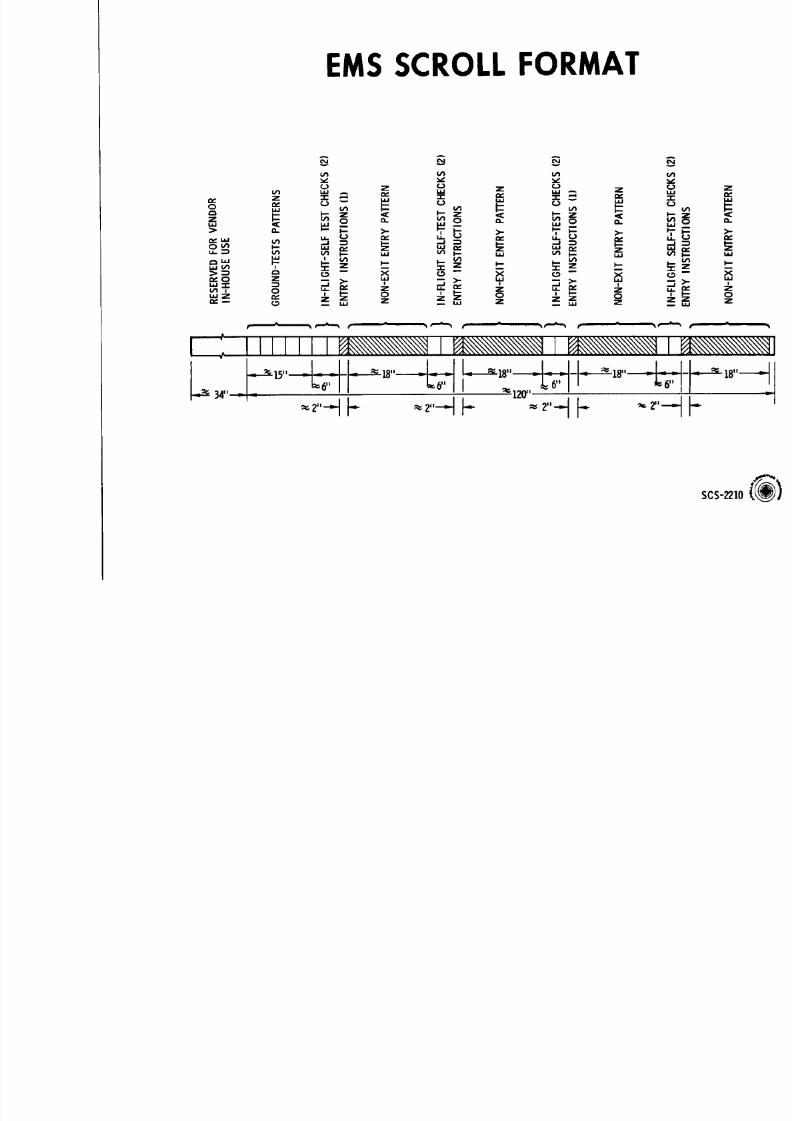
R
R
DFO
N
O
'
"
INH
U
1 I
G
ND
TS
-I'ER
NS
J
i
IN-F
GHS
T
CH
2
.
.--.
E
R
NSR
ONI1
i
-
s
i .
>
NON-EX
NTR
PA
-I'ER
_
,-
NONE
T
TR
_
v
y
/
_
IN-F
GHT
T
C
E
2
_
__
E
R
N
R
ON(1
:
N
NE
T
R
E
•
_L_
t,_
,os_
___
.
E
R
N
R
ON
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 126/148
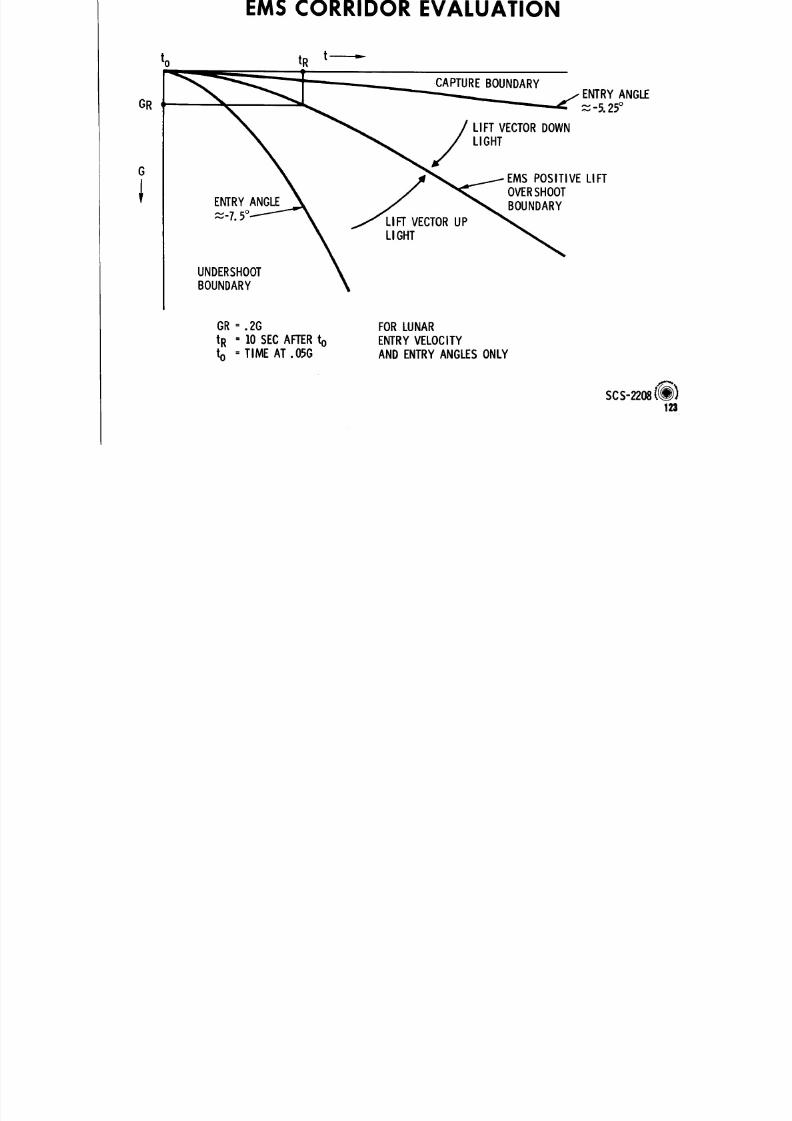
EM S C ORRIDOR EVALUATION
to tR t -_
CAPTUREBOU NDARYENTRYANG LE
GR _ -5. 2 5°
LIGHT

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 127/148
LIFTVECTORDO WN
LIGHT
G E MSP OSITIVELIFT
ENTRYANGLE BOUNDARY_- 7 .5' TOR UP
LI GHT
UNDERSHOOTBOUNDARY
GR = .2G F ORLUNARtR = 10 SECAFTERo ENTRYVELOCITYto = TIMEAT.05G ANDENTRYANGLE SONLY
OFF-SET FLIGHT LIMITS0
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 128/148
1038 37 36 35 34 33 32 31 30 29 28 27 26 25 24
VELOCITY,V,-.,1000FPS {._)CS-Z)09 124
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 129/148
_
9
'BOlO
_
-I
(]V
lNOI
V_FI
33
V
NON-EXIT ENTRY PATTERNF OR EM$O RB ITA L M IS SIO N
?9? 7
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 130/148
?9? 7 o
_" 8 6 4 05_ 1
_ __ 35
G o3, I, is l_L° 651413,, 1°' :
'NERTtALELOC ITY,~1000 PS
(_ ON-SETGU IDELiNE
(_) OFF -SETGUIDELINE
(_) RANGEPOTENTIALGUIDEL _NE
(_ SATELLITICVELOC ITYINDICATOR
(_ FULLLIFT PROFIL E SC5-2211{"_')
1 2 6
EM S FUNC TIONAL B LOC K DIAG RAMI- 1
I SELFTES TIRCUITS 61 O.05 G I _1 IOSEC
I 0G±l___ I .
I I o.2G J- --_-_ G> O.2 G
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 131/148
I ._ I COMPA RATO R.__ ._ G < O.2GAiD I --I _ CONVERTER --A C CE LE R O M ET E R !
L "_- ....... _ t_ ,, vO- _V
o,v,o H'HI NETWORK CONTRO L SERVOt
AV/RNG I I Vo
1 SE T SE TSCS _ I I
+
J i i _I DECOD ER H DRI VER H ']
ROLLA TTITUDE RANGE aV IRNG ,,,V IRNGIN DICA TOR INT EGRATOR COUNTER - DIS PLAY
b b 2 6V, 400C PS
_ _ _ G
e _a T le o
"i {]_'" SCS-2015
1 2 7
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 132/148
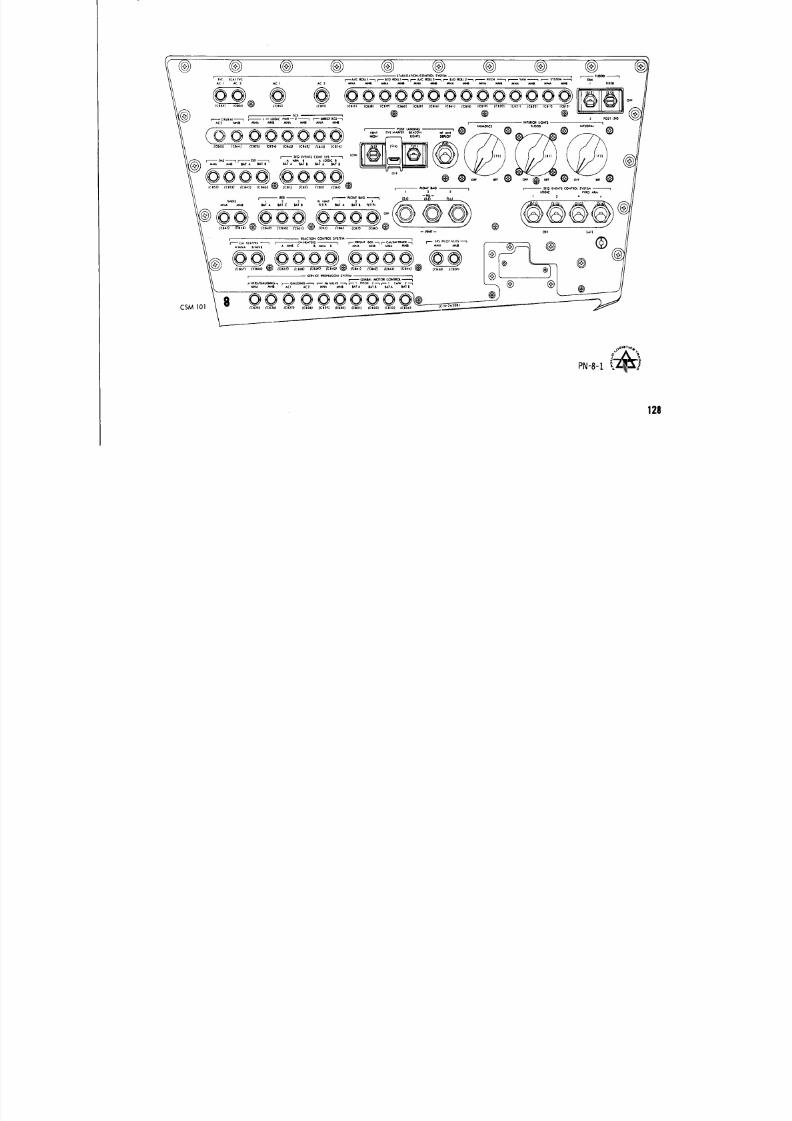
PN-8-1 _ ,"--_ll_,-aZ
1 2 8
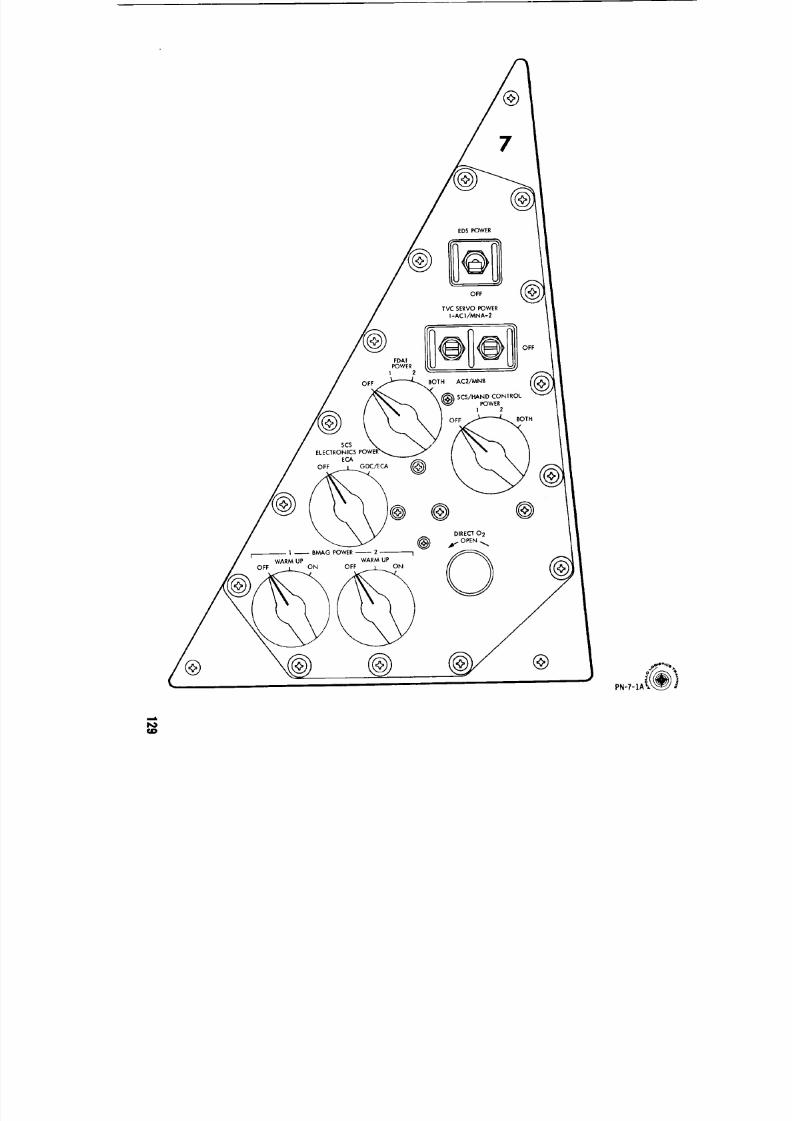
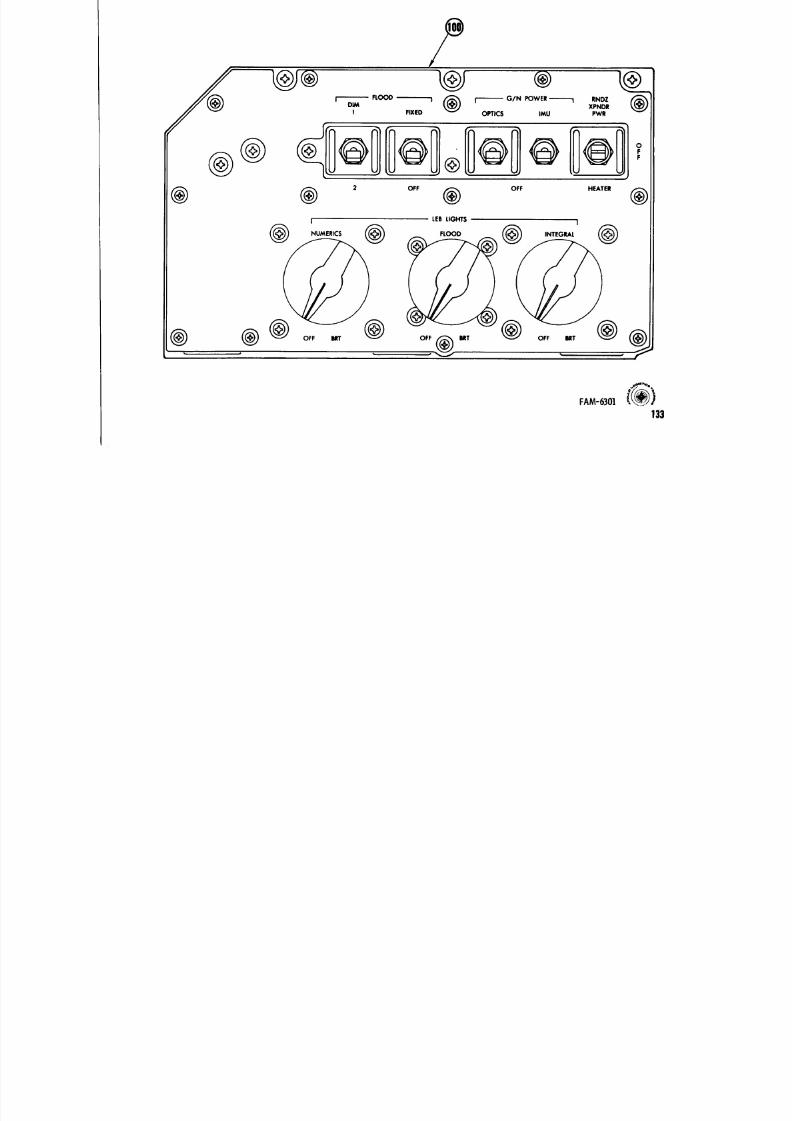
7
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 133/148
7
EDSPOWE R
OFF
TVC S ERV O POWERI-AC1 /MNA-2
,_R2 _ OrE
SCSNON S WlTCHED POW ERI
PANEL29 I PANEL) I
MAINk MAINR | I pOLLAJ C RO LLRID PITCHCHANNELN AI_!_.J[| | CHANNELNABLE CHANNELNA BLE YAWCHANNEl NABLEM CMea, ._, .s , CRE5 r-_.... _ ---- ---
' c+l J+.+R O_,, ° _ '--' -- r+_ R ,,,R,OR.ROUP e I B _ I I ROLLSM CR Y) I OFF_ CM& SMBe [ I SOLENOIDS I ' CM /SM SO LENOI4)4)2 C8 I I I I SOLENOIOS RAI I I I THROUG H I B i I SOLENODS I I I THROUGH
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 134/148
c+ l J2 C8_ I I • I I SOLENOIOS rRAI I e I I THROUG H I B i I SOLENODS I I I THROUGHCR_ I I I THROUGH CB2_ ! RJ-5 , 6 RE-6. T CM/SMSEPel I ] /',,.CBZ6A /CROLL21 I ,_/ +'_" I :: f; ! Ct+',/SM4)E P
..... _ iRE,, _, C.,+MSE_I .g iiCB32 I I I i j Cl_le _ I I I l
T_, '-TT._ .,o _'_R_ -L',] MESCA l__.t _EOR,VER mCA .'_ ! _ LLOR,+ER I ,ES CA I o I P11 CHURIVER "AESCA [ o I ]
iE_ jpl_ ii -- - I ;:' : . CNAfLE I _L : I YAWDRIVER
o_ - ROLLRIDMESCB I i.- - j ENARLE-S.D.3[4 ]5 10 MESCR I • t ENABLE -S,O. ,J4) ,JJ,2 MCSC E o I S MESC_ ENANL_-4).D.,6,T jRGROUP _ CB61 I ENkBLE L. .J ' L ..... ,J * .D. L,2.3,4 I DI • - -- .... I- ..... ..J k. ..... .-I
cmsRI OOU.I sw
!1_". ! _.._o , . / I- : I-/PITCH J ] +CMCiT -FOAIGEL-0.0 5g
I i
,++++ + F,_2 l ! - MJk_ LIAL_, RILL, PITCH,&YAW BATTE RY)
CR22 I " - LIMITCYCLE ATTDEA URANO [ _ = _ ]
I iROUP YAW YAW - RATE FDAISCALE CMCATTNABLE
31 ,CB2 , -SW " THRUS TN- O IRECTg_LAGE ] [i - TVCGIMRALDRIV EIPI TCH& YAWlII+°_ A, , I ,.t,,.c_ 6 _omcWR I ......
, . . ,.....,,'_ CBE) I I
• DIREC)NC$ I l , OFF " "
• 4)R()UP N I t.T+mL ,1_OmmT S WIT CH,_sl I5 =I +aI SPSPILO T P ..... "1I i.l wE+ + ,oFE"".
,'_ C668 i t zl I
• _ I L_ + + I ,1_.- • Pi TCHDI RECI COILSE NGE , ++SJ_ . _ . _ +A_.o B6 9 I I ' tzli
I_ "_'_'- _/ , m , *,WOI+C,O,LEE=,.+ L.......-- +l I +,+,m_+ ""',
S C$ . 24 )_ EZ_)
130
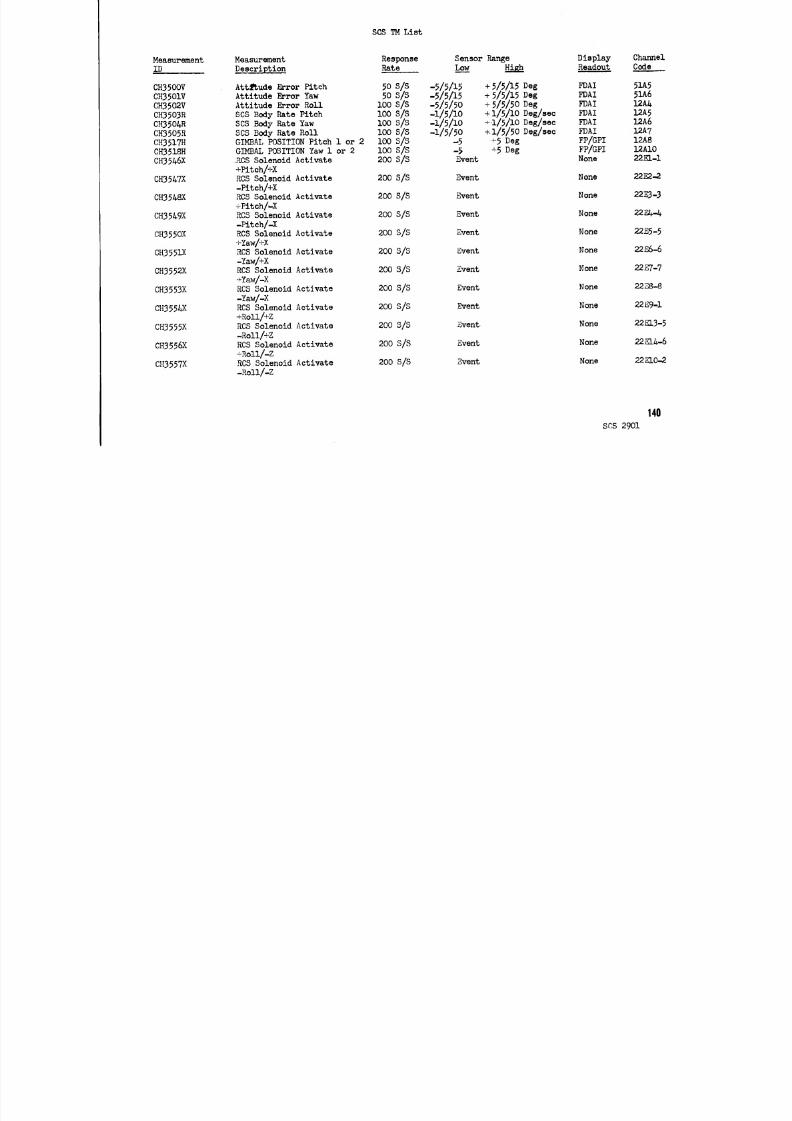
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 135/148
1 3 1
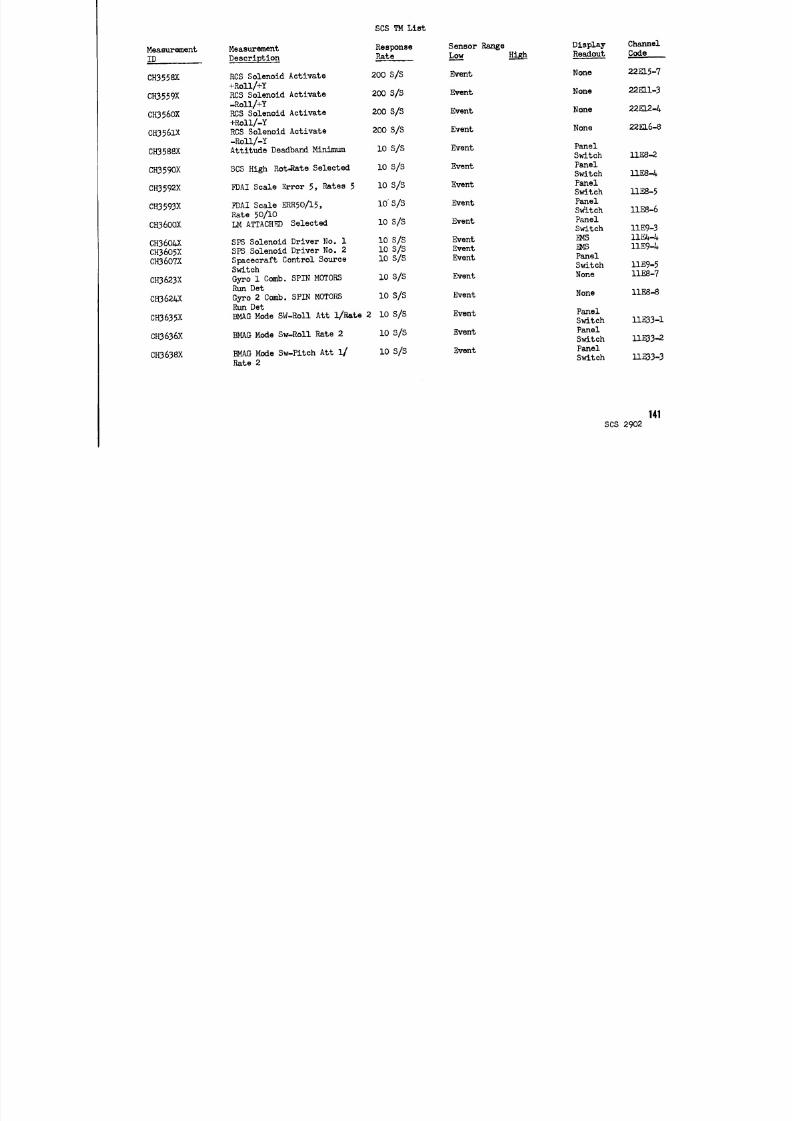
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 136/148
U2
2
/d NDIM XPNDR
! FIXED OPTICS IMU PWR
®® [1®
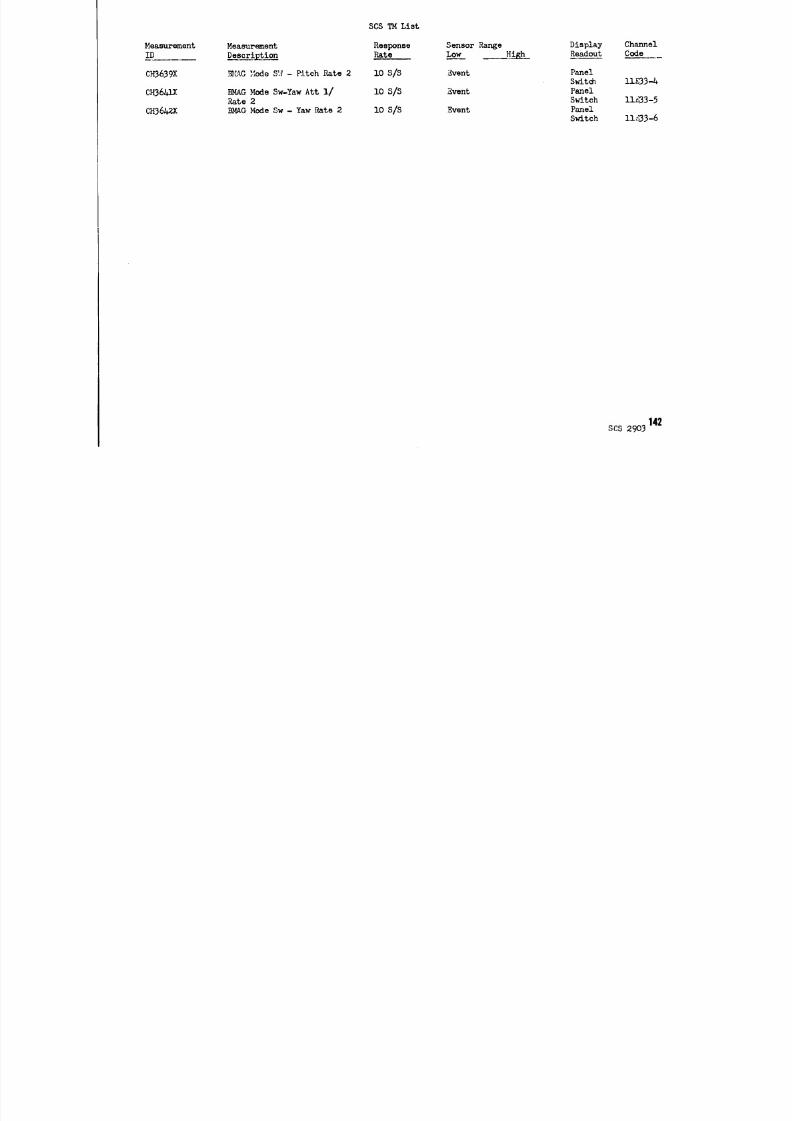
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 137/148
/d , --o,N,ow®® [1®® ® ' o,, ® o" .,,,, ,.®[ LEB LIGHTS 1
® ®@°,,,',, @ °" "' @°""" @@11
1 3 3
CS M 101
g \
@ 226 @f
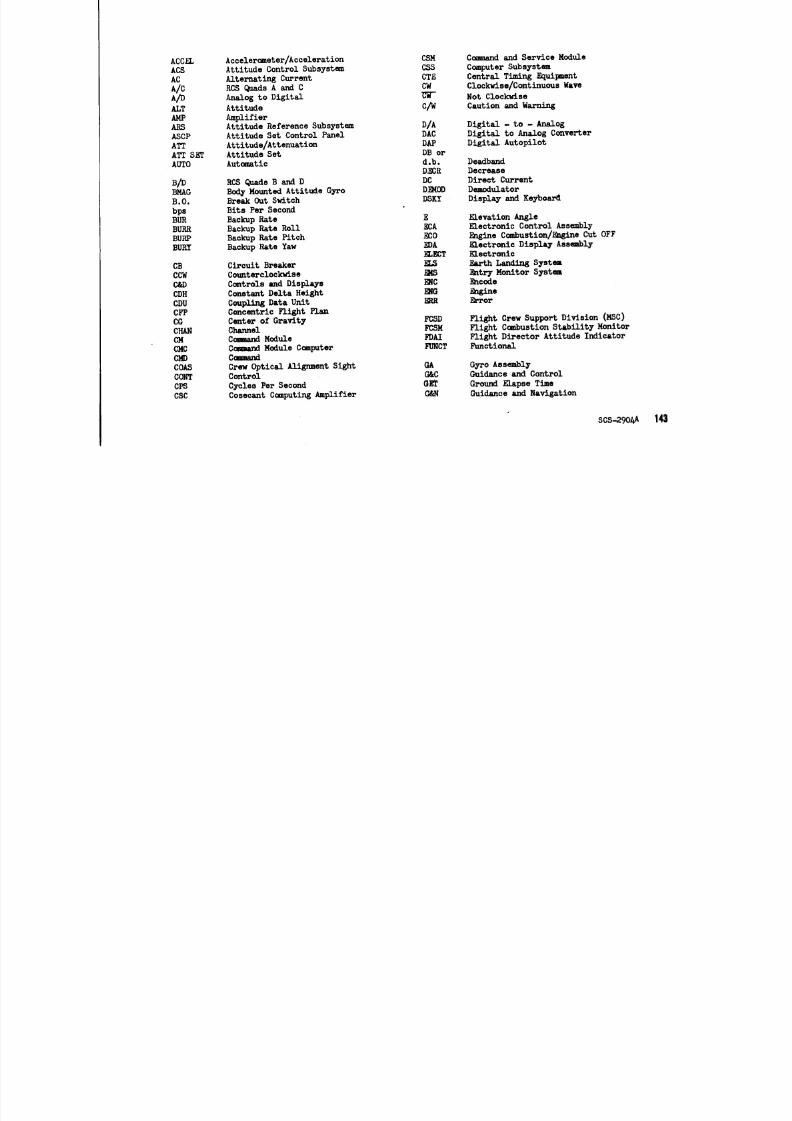
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 138/148
(_ ! FUELCELLBUS |1 ClP rOGENIC1 H2 _ 2 (_
PUMPS -AC REACS CONT PURG E RAD MNA MNB
@ ooo;r FUEl.CELL2 1BUS t O 2 HTR 2
PUMPS-AC R EACS CO NT PURG E RAD MNA MNB
@ ©oo_BUS 1 QTY AMPL2
PU MPS-AC R EAC$ CONT PURGE RAD AC I AC 2
®i TANK 1 C aYOGE NICFA N MOTORS T ANK 2 I I LIGHTING I
B
GNC POWE RDISTRIBUTION
e_ . 5 PBA C_B X GC_3_ V
BUS A : -'_o H I I _I '% p_ S_. I b OUCOSYNMU HTR• _ SIGNAL CONDITIONING
BUS Be _o a ) I _ , TEMPCONT ROUfRL ,_'t _ IM U H EA TE RS
PA NEL1 00 T ii OPTIC EYEPIECEHTRS
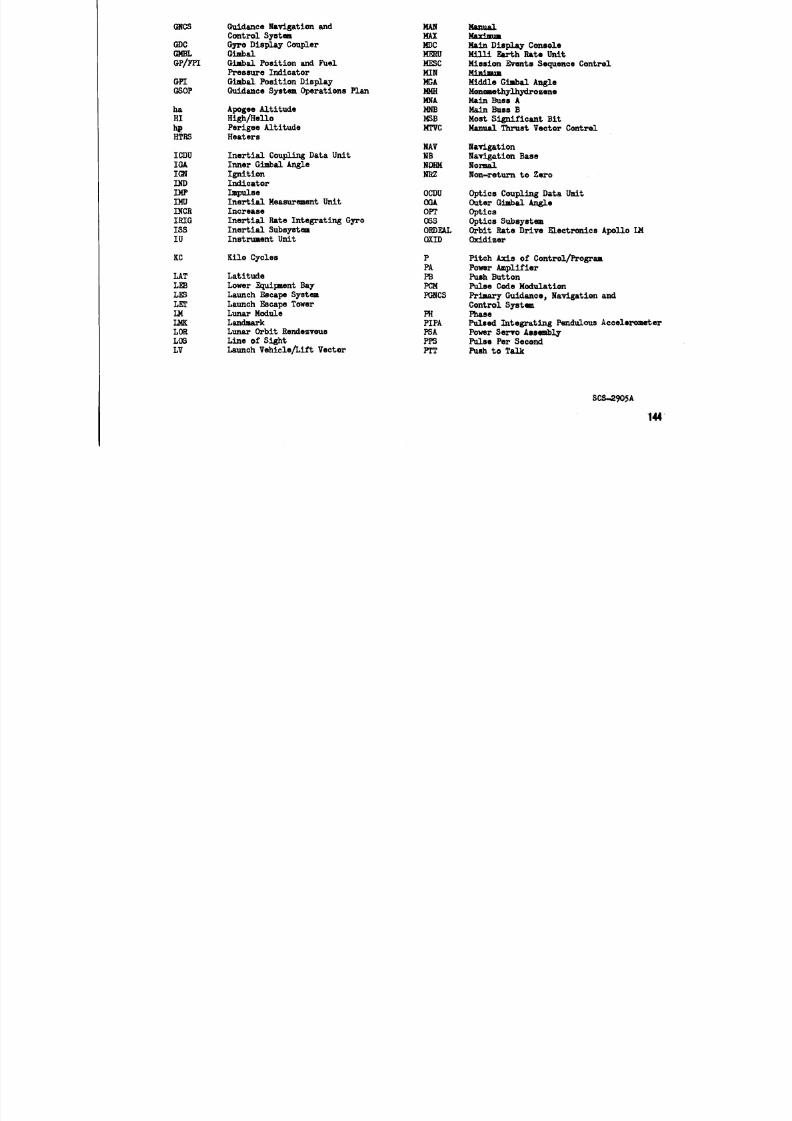
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 139/148
BUSA, 0_o _ MB56 I MU P&PA PULSET ORQUEELE CTRONICS
IMU PWR DMBL SEEVOrl rCTRONICS
BUS B _ _ ,:' l"_B° I_ ," SIGNA L CON DITIONINGr,o_ CT_O" ,CBP IP & IRI D PREAMPS
_ C GI_/- = PIPA ELECI RONICS
IRJG FI NE ALIGN rlECTRONICS
CG]20]V
p.. - = CDU DAC DEMO0
E 'TF OA l & D AP R EF
_ SIGNALC ONO ITIONING
- _ GYROWHEEL SLOI_RSffPIP FIXED HTRS
EC DU
BUS A ; ( PT I C "'
OPTICS : P OWEr : ECDUBUS---,._o _CB _ __m 2 8v58 _p. sCP S i ip MOTO RIE_C IT
TAC H D(CIT
OP TICS CONTSIGNALC ONDITIONINGCDLIDAC O EMOD
• OP TI C S S ERVO AMPSI. OPTICS ELE CIRONICS& REL AYS
o._.oJL_ C G 1 523 XUS A _ i_ _
COMPUI I pC MS! l I LOGIC
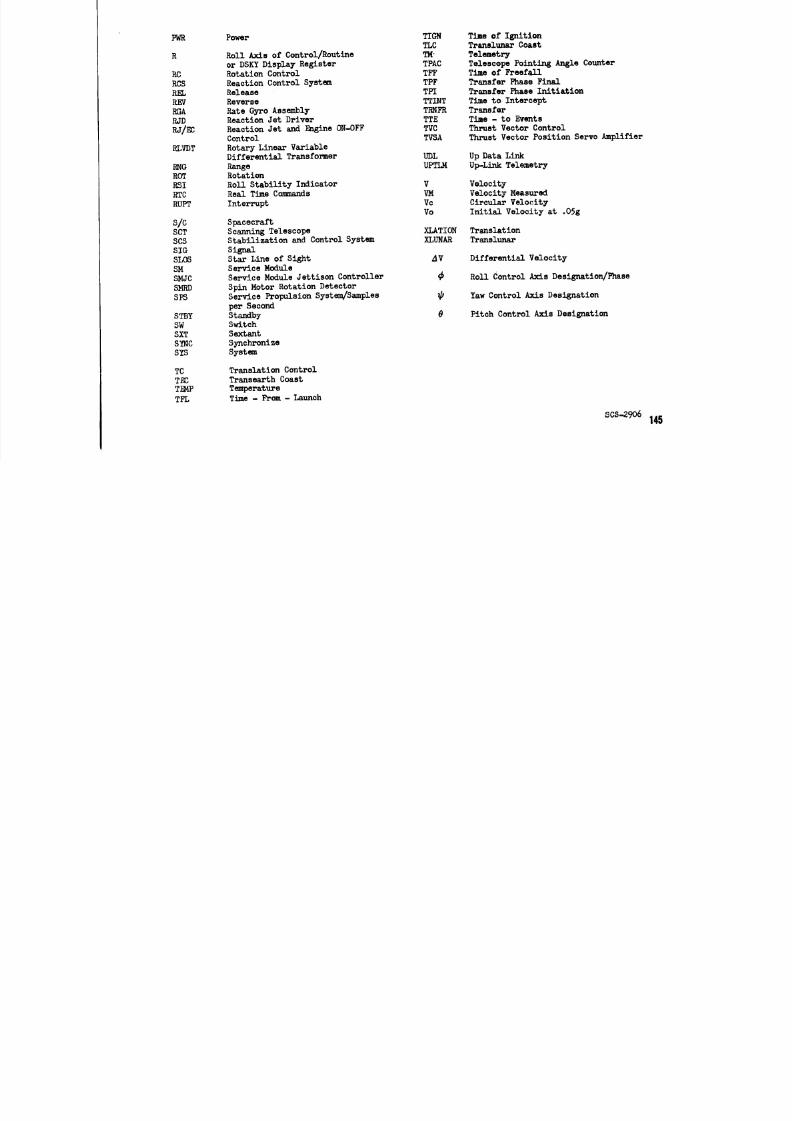
8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 140/148
PGNCS A / B TLM LIST
PO N
Measure ment Channel
No. Measure ment Description Cede .... S / S
CGOOOIV C_PUTERDIGITALATA_0BITS 51DSI 50
CGIO&OV _120VDCPIPASUPPLYCLEV_ iOA83 1CGlllOV 2,5VDCTMBIAS lOA138 1CG1201V IMU28V.8KC1 PCT0D_GSUPRMS 1OA91 1
CG1211V OPTX28V.8KC1 PCT0DEGRMS lOAfS6 1
CG1331V 3.2KC8VSUPPLY 1OA85 1
CG1513X IMU+28VDCSTANDBY llE15-2 lOCG1523X +28VCMCOPERATE llE15-3 i0CG 15 33X OP TX OP ERATE +28 V DC IIEI5- / iO

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 141/148
_CG 20O IV X P IPA SG OUTPUT IN PHASE 5 1A2 50CG 202 1 V Y PIPA SG OUTPUT IN PHASE 5 1A3 5 0CG 20_l V Z P I PA SG OUTPUT IN PHASE 51AA 50CG2112V IGIXR_OLV_OUTPUTIN llA5_ lO
CG 21 1 3 V IG IX RE SOLVER O UTPUT COS i iA59 iOCG 21 1 7V IGA SERVO _R OR IN PHASE 12A2 i 00CG 21_2 V MG IX RE SOLVER OUTPUT SIN l lA6 0 i0CG 2 1 _3 V MG IX RESOL VER OUTPUT COS llA6 1 i0CG 21A7V MGA SERVO ERR OR IN PHASE 12AI i OOCG2172V 0GIXRESOLVERUTPUTIN IIA62 I0CG 2173 V 0G IX RESOL VER OUTPUT COS IIA63 i OCG 21 77V OGA SER VO ERR OR IN PHASE 12A3 I OOCG 2219V PITCH ATT ERROR - CDU DAC OUT I I A6A I0CG 22Ag v YAW ATT ERROR - CDU DAC OUT II A65 i0CG 2279V R OLL ATT ERR OR - CDU DAC OUT II AI 6 iOCG 230OT PIPA T_PF_ATURE IO A96 iCG2301T IRIGT_PF2ATURE lOA1 1CG 23 02 X IMU HEATER CURRF / _ T IO A5 iCG 2 3 0 3X IMU BLOWER CURR_NT I OA7 iCG 3 0 11V TRUNNION C DU FINE ERROR 11A17 1 I 0
CG 3021 V S HAFT CDU FIN E ERROR IIA I SO I 0
1 3 8GNC - 167B - I
PGNCS A / B TLM LIST
PC M
Mea surement C h annel
No. Measurement Description C ode S / S
CG31_OV SXTSHAFTTACH_ER OUTPUT IIA172 iOCG 3150V SXT TRUNNION TACHOMETER OUT PUT IIA173 iOCG3160V SCTSHAFTTACHOMETERUTPUT IOAI3 i
CG3170V SCTTRUNNIONACHOMETERUTPUT lOAf4 i
CG3721V SHAFTDUDACOUTPUT 11A52 iOCG3722V TRUNNIONDUDACOUTPUT IIA53 iOCG50AOX CMCWARNING llE19-1 10

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 142/148
GNC - 167A 139

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 143/148
S C S T M L ist
Mea sure ment Me a surement Response Sensor Range Display Channe lID Descri p tion Rate Bow High Readout Code
CH3558X RCS Solenoid Activate 200 S / S Event None 22E15-7÷Roll / ÷Y
CH3559X RCS So l e n oi d Activate 200 S / S Event No n e 22EII-3-R o ll / +Y
CH3560X RCS Solenoid Activate 200 S / S Event None 22E12-_+RolI / -Y
CH3961X RCS Solenoid Activate 200 S / S Event None 22E16- 8
-R o lI / -YCH3588X Attitude Deadband Minimu m i0 S / S Event Panel
Switch IIE8-2

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 144/148
CH3590X SCS High Rot_Rate Selected i0 S / S Event PanelSwitch llES-&
CH3592X FDAI Scale Error 5, Rates 5 i0 S / S Event PanelSwitch IIE8- 5
CH3593X FDAI Scale ERR50 / 15, i0"S / S Event PanelRa te 50 / 10 Switch 11E8-6
CH3600X LM ATTACHED Selected l0 S / S k_ v ent PanelSwitch llEg-3
CH360hX SPS Solenoid Driver No. 1 l0 S / S Event _4S llE_-_CH3605X SPS Solenoid Driver No. 2 10 S / S Event _4S llE9-_CH3607X Spacecraft Control Source lO S / S Event Panel
Switch Switch llE9-5CH3623X Gyro I Comb. SPIN MOTORS I0 S / S h_ent None llES-7
R un Det
CH362 h l Gyro 2 Comb. SPIN MOTORS lO S / S Event None llES-8R un Det
CH3635X BMAG Mode SW-Roll Att 1 / Rate 2 I0 S / S Event PanelSwitch llk_33-1
CH3636X B_G Mode Sw-Roll Rate 2 i0 S / S Event PanelSwitch IIE33-2
CH3638X BMAG Mode Sw-Pitch Att i / i0 S / S Event PanelRate Switch IIE33-3
14 1S C S 2 9 02
S C S T M L ist
Measurement Measurement Response SensorRange Display Channel
ID Description Rate Low _____Hig Readout Code
CH3639X P_,_OMode S_!- Pitch Rate 2 I0 S / S Event PanelSwitch IIE_33-A
CH36AIX B_AG Mode Sw-Yaw Att i / I0 S / S E_ent PanelRate Switch ii_3-5
CH36AP_X BMAG M o de Sw - Yaw Rate 2 I0 S / S Event PanelSwitch 11_33-6

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 145/148
1 4 2SCS 2 90.3
ACCE L Acceler o meter / Acceler a ti on CS M Com man d a nd Servi c e Mod u leACS Attitude C on tr o l Subsyste m CSS C o mputer S u bsystemAC Alter na t ing Curre n t CTE Ce n tral Timing E qu i p ment
A/ C RCS Q uad s A a nd C C W Cl o ckwise / Con tinu o us Wav eA/ D Anal o g t o Digital UW- N o t Cl o ck wiseALT Attit ud e C / W Cauti o n an d Warni n g
AMP AmplifierARS Attitude Reference Subsystem D / A Digital - t o - Anal o gASCP Attitude Set C o ntr o l Panel DAC Digital t o An al o g C on verterATT Attitu de / Attenuati o n DAP Digital Aut o pil o tATT SET Attit ud e Set DB o rAUTO Au t o ma t i c d .b. D e a d ba nd

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 146/148
DECR Decre a se
B/ D RCS Q u a d s B a nd D DC Direct Curren tBMAG Body Moun te d Attitu d e Gyro D_OD Dem od ul a t o rB.O. Brea k Ou t S witch DSKY Dis p l a y a n d Keybo a r_
bps Bits Per Sec ond
BUR Bac k up R a te E Elev a tion A n gleBURR Ba c k u p Ra te R o ll ECA Elec t ron ic Con t rol AssemblyBURP B a ck up Rate Pitch ECO E n gine Combustion / En gine C u t OFF
BURY Backup Rate Ya w _ DA Electr on ic Display Assembly_ECT Electr on ic
CB Circ u it Breaker _ Ear t h La nd i n g Sys t emCCW Count erclockw ise I_S E ntry Mon itor SystemC&D Contr o ls an d D is p lays _ C _ cod e
CDH Con sta nt Delta Height _ G En gi n eCDU Coupli n g Data U n it _ Err o rCFP Co n ce n tric F light p ] _ nCG Ce n te r o f Gra vity FCSD Flight Cr e w S u p po rt Divisi o n ( MSC)CHAN Chan n el FCS M Flight Com b usti on Stability M o nit o rCM Cc_ Module FDAI Flight Dire c t or Attit u de Ind i c a to rCMC Comma nd Module Comp u ter FUNCT Fun ct i o nalC_ Comma nd
COAS Crew Optical Alignme n t Sight GA Gyr o Assem b lyCONT Con t ro l G&C Gu ida n ce an d C on tr o l
CPS Cycles Per Sec ond GET G r o u nd _ ap se TimeCSC C o secant Computing Amplifier G&N Gu i d a n ce and Havig at i on
scs-29o 143
GNCS O u i d a n ce Navigati o n and MA N Man ual
Con tr o l Syste m MAX Ma_-u mQDC Gyr o Display Co u ple r HDC Mai n D isplay Cons ole(]_BL 04n,ha.l. M]_U M.!114 Ear th Rate UnitGP / FPl Gi mbal P o siti on a nd Fuel M_C Mis s i on Ev e n ts Sequen c e Con tr o l
Pres s ure I n dic a t o r MI N Mini mum
GPI 04 tu balP o siti on Display _K_A Mi dd le Gi mbal A n gleC_ OP Gui d a nc e Sys t em Ope r ations Pla n _H Me ncm eth y l h _ oz e n e
MNA Mai n Bu ss A
ha A po gee Altitude _B Ma4_ Bu ss BHI High / Hello _SB M o st Sig n ifi c ant Bith_ . Perigee Altitude MTVC Man ual Thr u st Vector Co n trolHTRS Heaters
MAV Navigati onICDU I n ertial Coup1_ug Data U n it N B Navigation BaseI GA In n er G_ mbal Angle NORM Normal

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 147/148
_ gI_ Ig n iti o n NRZ Non -ret u r n to Zer oIND I nd icat o r
IMP I mpulse OCDU Opti c s C o upli n g Data Un itIMU I n ertial Measureme n t Unit OGA O u ter @4tu bal An g le
INCR I n crease OPT OpticsI RIG In ertial Rate I n tegr a ti n g Gyro OSS Optics S ub systemISS I n erti al S ub system ORDEAL Or b it Rate Dri v e _ec t r_nic s Apoll o I / 4IU Instru ment U n it OXI D Oxidi z er
KC Kil o Cycles P Pitch Axis o f Co n tr o l / P r ogra mPA P o wer A mplifier
LAT Latitude PB Pu s h Butt onL_ Lo wer Equ i p me n t Bay PCH Pu lse C od e Modmlati onLES Lau n ch Escape System PGNCS Primary Gui d a n ce, Navigatio n a ndLET Lau n c h Es c ape Tow er C on t rol SystemLM Lun ar Module P H Phase
LMK Lan d mar k PIPA P u l s e d I n tegrating P_ d ul o us Aoceler o meterLOR Lun a r Or b it Re nd e z vous FS A Power Serv o Assa_lyL06 Li n e o f Sigh t PPS P u lse Per Seco ndLV Launc h V e h icle_ift Ve c tor PTT P u s h tO Ta3 k
PWR Power TI GN Time o f I gniti onTL C Tr ans lu nar Co a st
R Rol l Axis o f Co ntr o l / Ro u tine TH Te l emetryo r DSKY Dis p l a y Register TPAC Telesc o pe Poi n t ing Angle Counter
RC Ro tati o n C o ntr o l TFF Time o f Freefal lRCS Re a cti o n C o ntr o l System TPF Transfer Ph a se Fina lR_ L Rele a se TPI Transfer Phase Initiati onREV Reverse TTINT Time t o Interce p tRGA Rate Gyr o Assembly TRNFR TransferRJD Re a cti o n Jet Driver TT E Time - t o Eve n tsRJ / EC Re a cti o n Jet and Engine O N-OFF TVC Thrust Vect o r C on tr o l
Control TVSA Thrust Vect o r Posit i on Serve AmplifierRLVDT Rot a ry Linear Var i a ble
Differential Transf o rmer UDL Up Data LinkG R UPTLM U Li k T l

8/8/2019 Apollo Training Guidance and Control 09151967
http://slidepdf.com/reader/full/apollo-training-guidance-and-control-09151967 148/148
RNG Range UPTLM Up- Link Te l emetryROT R o tati on
RSI Rol l Stability In dicator V VelocityRTC Real Tim e Co mmands VM V e l o city M e asuredRUPT InteLL u pt Vc Circular Vel o city
Vo I n itial Vel o city at .OtgS / C SpacecraftSCT Scanning Telesc o pe XLATION Translati o nSCS Stabilizationand ControlSystem XLUNAR TranslunarSIG Sign_1
SLOS Star Line of Sight AV Differential VelocitySM ServiceModule
SMJC Service Module Jettis o n Controller _ Roll C o ntr o l Axis Designati o n / PhaseSHED Spin M o t or Ro t a ti on Detect or
SPS Service Pr o pulsi o n System / Samples _ Y a w Con tr o l Axis Desig na tionp er S ec ond
STBY Standby _ Pitch C on tr o l Axis Design a ti o nSW SwitchSXT Sextant
SYNC Synchr o nize
SYS System
TC Translati o n C o ntrolTEC Transearth C o astTI_ I P Tem p er a tureTFL Time - From - Lau nch
SCS-29061 4 5

















