AUTO-CALIBRATION AND CONTROL APPLIED TO ELECTRO-HYDRAULIC VALVES. PATRICK OPDENBOSCH Graduate Research Intern INCOVA (262) 513 4408 [email protected]. EXPERIMENTS ON HUSCO BLUE TELEHANDLER August 18, 2006. HUSCO International W239 N218 Pewaukee Rd. Waukesha, WI 53188-1638. - PowerPoint PPT Presentation
68
AUTO-CALIBRATION AND CONTROL APPLIED TO ELECTRO-HYDRAULIC VALVES PATRICK OPDENBOSCH Graduate Research Intern INCOVA (262) 513 4408 [email protected]EXPERIMENTS ON HUSCO BLUE TELEHANDLER August 18, 2006 HUSCO International W239 N218 Pewaukee Rd. Waukesha, WI 53188-1638
Transcript
AUTO-CALIBRATION AND CONTROL APPLIED TO ELECTRO-HYDRAULIC VALVES
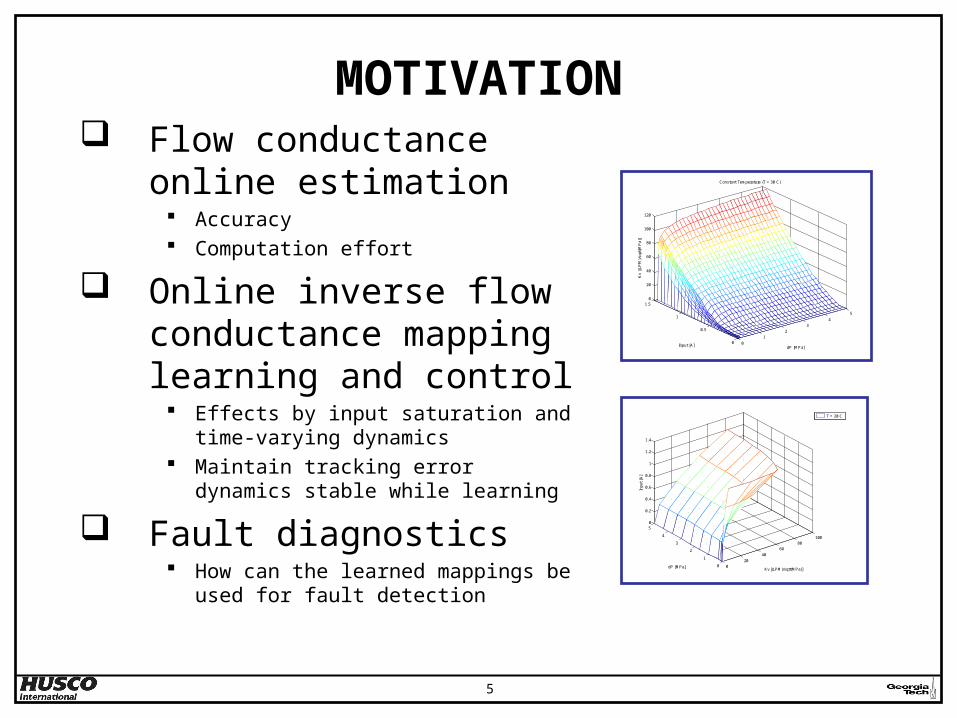
Fault diagnostics How can the learned mappings be used
for fault detection
6
PRESENTATION OUTLINE
MOTIVATION TOPIC REVIEW SETUP IMPROVEMENTS MAPPING LEARNING & CONTROL EXPERIMENTAL RESULTS FUTURE WORK CONCLUSIONS
7
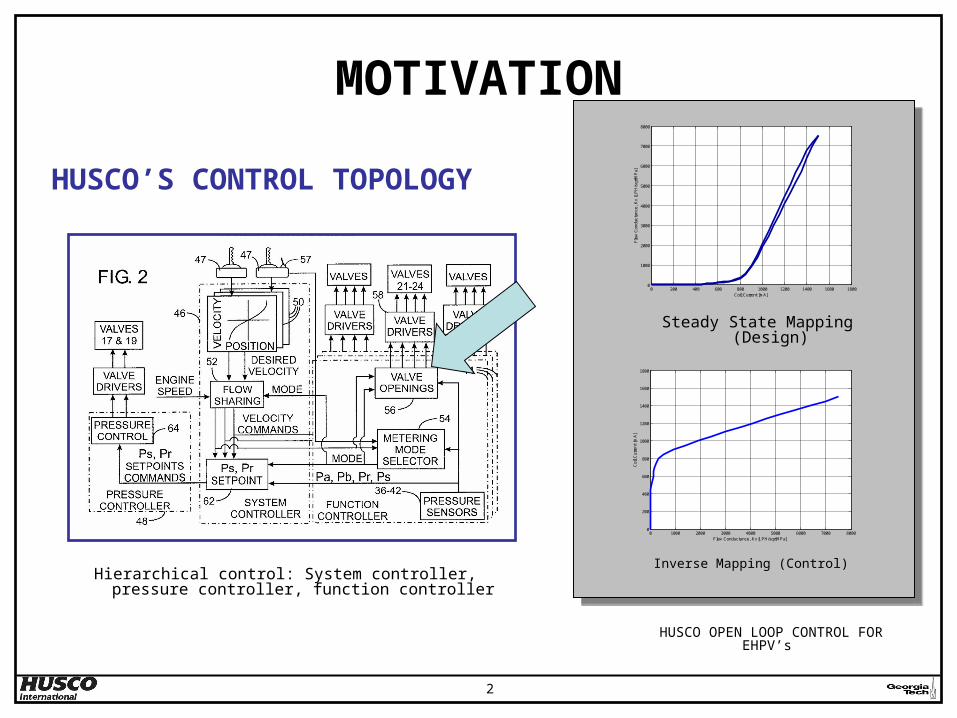
TOPIC REVIEW
PURDUE PAPERS Liu, S. and Yao, B., (2005), Automated modeling of
cartridge valve flow mapping, in Proc: IEEE/ASME International Conference on Advanced Intelligent Mechatronics pp. 789-794
Liu, S. and Yao, B., (2005), On-board system identification of systems with unknown input nonlinearity and system parameters, in Proc: ASME International Mechanical Engineering Congress and Exposition
Liu, S. and Yao, B., (2005), Sliding mode flow rate observer design, in Proc: Sixth International Conference on Fluid Power Transmission and Control pp. 69-73
8
TOPIC REVIEWCATERPILLAR PATENTS
Aardema, J.A. and Koehler, D.W., (1999) System and method for controlling an independent metering valve, U.S. Patent (5,960,695)
Aardema, J.A. and Koehler, D.W., (1999) System and method for controlling an independent metering valve, U.S. Patent (5,947,140)
Kozaki, T., Ishikawa, H., Yasui, H., et al., (1991) Position control device and automotive suspension system employing same, U.S. Patent (5,004,264)
NEW PATENTS Reedy, J.T., Cone, R.D., Kloeppel, G.R., et al., (2006) Adaptive position
determining system for hydraulic cylinder, U.S. Patent (20060064971) Du, H., (2006) Hydraulic system health indicator, U.S. Patent (7,043,975) Wear, J.A., Du, H., Ferkol, G.A., et al., (2006) Electrohydraulic control
system, U.S. Patent (20060095163)
9
TOPIC REVIEW
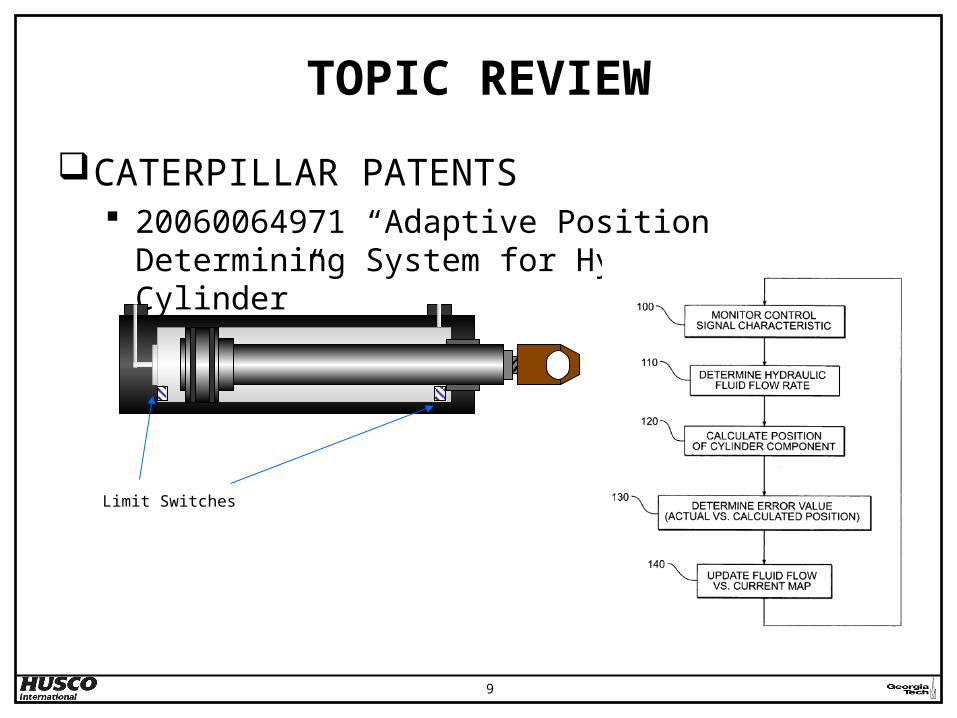
CATERPILLAR PATENTS 20060064971 “Adaptive Position Determining System
for Hydraulic Cylinder”
Limit Switches
10
TOPIC REVIEW
CATERPILLAR PATENTS 5,004,264 “Position Control Device and Automotive
Suspension System Employing Same”
Position Detector
Long-Jang Li, US Patent 5,942,892 (1999)
11
TOPIC REVIEW
CATERPILLAR PATENTS 20060095163 “Electrohydraulic Control System”
Position/Velocity sensor
Adaptive scheme: no details found
12
TOPIC REVIEW
CATERPILLAR PATENTS 7,043,975 “Hydraulic System Health Indicator”
Health Monitoring using Bulk modulus and other
model-based parameters
(Position/velocity sensor)
Using Lyapunov stability theory
Based on pump pressure discharge dynamics or cylinder head end control pressure
13
PRESENTATION OUTLINE
MOTIVATION TOPIC REVIEW SETUP IMPROVEMENTS MAPPING LEARNING & CONTROL EXPERIMENTAL RESULTS FUTURE WORK CONCLUSIONS
14
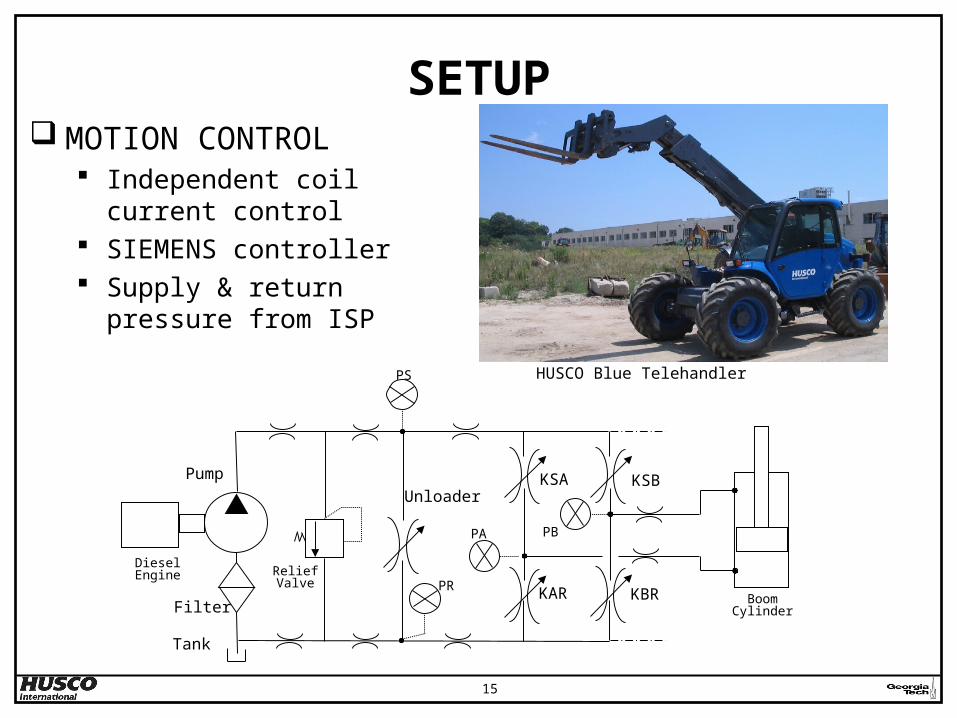
SETUP MOTION CONTROL
Independent coil current control
SIEMENS controller Supply & return pressure from
ISP Supply
Boom Function Kinematics
HUSCO Blue Telehandler
Boom Function
KSA
Return
KSB
KBRKAR
15
SETUP MOTION CONTROL
Independent coil current control
SIEMENS controller Supply & return pressure from
ISP
HUSCO Blue Telehandler
Diesel Engine
Pump
Filter
Tank
Relief Valve
UnloaderKSA KSB
KAR KBR Boom Cylinder
PS
PA
PR
PB
16
PRESENTATION OUTLINE
MOTIVATION TOPIC REVIEW SETUP IMPROVEMENTS MAPPING LEARNING & CONTROL EXPERIMENTAL RESULTS FUTURE WORK CONCLUSIONS
17
IMPROVEMENTS PUMP CONTROL
0 2 4 6 8 10 12 14 16 18 20-5
0
5
10
15
20
25
30
35
Time [sec]
Pre
ssur
e [M
Pa]
PspPSPAPBPR
Pressure override for pump pressure control (ISP code)
Ripples
18
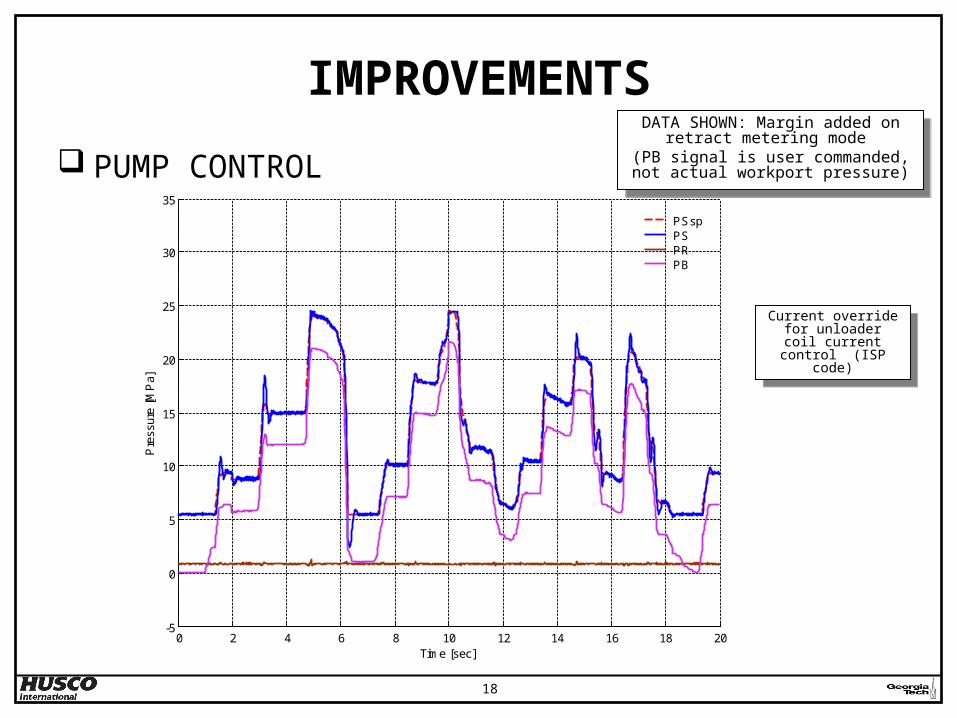
IMPROVEMENTS PUMP CONTROL
Current override for unloader coil current control
(ISP code)
0 2 4 6 8 10 12 14 16 18 20-5
0
5
10
15
20
25
30
35
Time [sec]
Pre
ssur
e [M
Pa]
PSspPSPRPB
DATA SHOWN: Margin added on retract metering mode
(PB signal is user commanded, not actual workport pressure)
20
IMPROVEMENTS ANTI-CAVITATION
0 1000 2000 3000 4000 5000 6000 7000 80000
1000
2000
3000
4000
5000
6000
7000
8000INCOVA Parametric Valve Calculation Standard Metering Retract
KSB [LPH/sqrtMPa]
KA
R [L
PH
/sqr
tMP
a]
KOUT_MAX
PIN
_MIN
Keq_dPmin
KIN
_MA
X
POUT_MAX
Keq
= R
3/4
Unconstrained Operating Point
Constrained Operating Point
21
IMPROVEMENTS ANTI-CAVITATION
55 56 57 58 59 60 61600
700
800
Time [sec]
Pos
ition
[mm
]
55 56 57 58 59 60 61-1
-0.5
0
0.5
Time [sec]
Vel
ocity
[kph
]
MeasDes
55 56 57 58 59 60 610
5
10
15
Time [sec]
Pre
ssur
e [M
Pa]
PSPAPBPR
55 56 57 58 59 60 610
2000
4000
6000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
A+B+A-B-
Cavitation
22
IMPROVEMENTS ANTI-CAVITATION
No Cavitation
0 2 4 6 8 10 12 14 16 18 200
150
300
450
600
750
900
Time [sec]
Pos
ition
[mm
]
0 2 4 6 8 10 12 14 16 18 20-20
-5
10
25
40
55
70
Ang
le [d
eg]
Position Angle
0 2 4 6 8 10 12 14 16 18 20-250
-150
-50
50
150
250
Time [sec]
Spe
ed [m
m/s
]VdesVcmdVmeas
0 2 4 6 8 10 12 14 16 18 20-5
0
5
10
15
20
25
30
35
Time [sec]
Pre
ssur
e [M
Pa]
PspPSPAPBPR
Flow Sharing
23
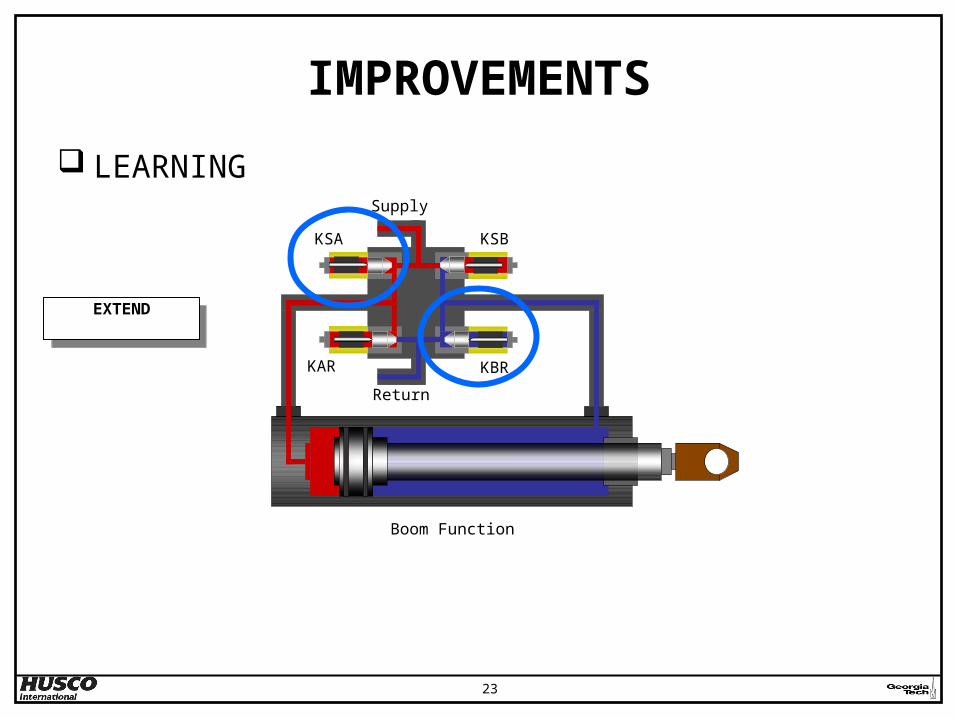
IMPROVEMENTS LEARNING
EXTEND
Supply
Boom Function
KSA
Return
KSB
KBRKAR
24
IMPROVEMENTS LEARNING
RETRACT
Supply
Boom Function
KSA
Return
KSB
KBRKAR
25
IMPROVEMENTS LEARNING
EXTEND/RETRACT
Supply
Boom Function
KSA
Return
KSB
KBRKAR
26
PRESENTATION OUTLINE
MOTIVATION TOPIC REVIEW SETUP IMPROVEMENTS MAPPING LEARNING & CONTROL EXPERIMENTAL RESULTS FUTURE WORK CONCLUSIONS
27
LEARNING APPLIED TO NONLINEAR SYSTEM
MAPPING TO BE LEARNED (simplified)
MAPPING LEARNING & CONTROL
1 sol,,k k kK F K i [ ]MAX0,K KÎ[ ]sol, 0,1500mAki Î
0 1000 2000 3000 4000 5000 6000 7000 80000
200
400
600
800
1000
1200
1400
1600
1800
Flow Conductance, Kv [LPH/sqrtMPa]
Coi
l Cur
rent
Com
man
d [m
A]
Expected curve shift
28
0 2000 4000 6000 8000 10000 120000
200
400
600
800
1000
1200
1400
1600
1800
2000
Flow Conductance, Kv [LPH/sqrtMPa]
Coi
l Cur
rent
[mA
]
MapGrid
LEARNING APPLIED TO NONLINEAR SYSTEM
MAPPING TO BE LEARNED (simplified)
MAPPING LEARNING & CONTROL
1 sol,,k k kK F K i [ ]MAX0,K KÎ[ ]sol, 0,1500mAki Î
Expected curve shift
29
MAPPING LEARNING & CONTROL LEARNING APPLIED TO NONLINEAR SYSTEM
CONTROL DESIGN Tracking Error: Error Dynamics:
1 sol,,k k kK F K i [ ]MAX0,K KÎ[ ]sol, 0,1500mAki Î
sol, sol,1 sol, sol,
sol,
, ,,
d d d dk k k k d
k k k k k kk k
F K i F K ie e i i o e
K i
dk k kK K= -e
1 sol, sol,d d d
k k k k k ke J e Q i i Linear Time
Varying System
30
LEARNING APPLIED TO NONLINEAR SYSTEM
CONTROL DESIGN Error Dynamics:
Deadbeat Control Law:
Closed loop
MAPPING LEARNING & CONTROL
1 sol,,k k kK F K i [ ]MAX0,K KÎ[ ]sol, 0,1500mAki Î
1 sol, sol,d d d
k k k k k ke J e Q i i
1sol, sol,
d d dk k k k ki i Q J e-= -
1 0ke
31
MAPPING LEARNING & CONTROL
1 sol,,k k kK F K i [ ]MAX0,K KÎ[ ]sol, 0,1500mAki Î
1sol, sol,
d d dk k k k ki i Q J e-= -
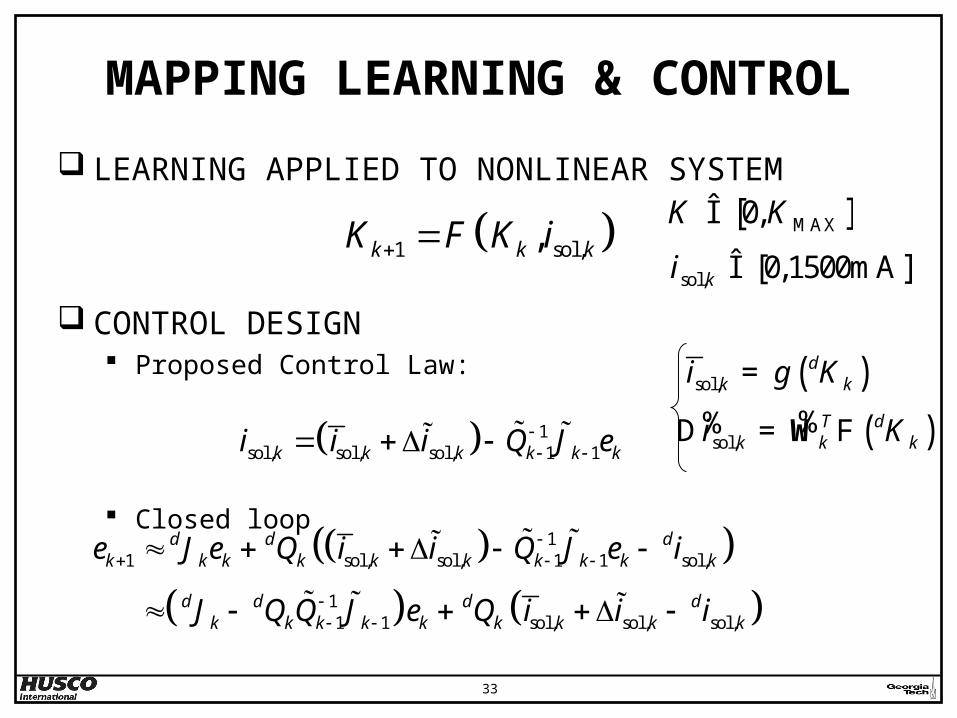
LEARNING APPLIED TO NONLINEAR SYSTEM
CONTROL DESIGN Deadbeat Control Law:
Proposed Control Law:
1sol, sol, sol, 1 1k k k k k ki i i Q J e
( )sol,d
k ki Kg=( )sol,
T dk k ki KD = FW%%
32
Nominal inverse
mapping
Inverse Mapping
Correction
Adaptive Proportional Feedback
NLPN
Jacobian Controllability
Estimation
KVdKV
icmd
MAPPING LEARNING & CONTROL
EHPVServo
33
LEARNING APPLIED TO NONLINEAR SYSTEM
CONTROL DESIGN Proposed Control Law:
Closed loop
MAPPING LEARNING & CONTROL
1 sol,,k k kK F K i [ ]MAX0,K KÎ[ ]sol, 0,1500mAki Î
1sol, sol, sol, 1 1k k k k k ki i i Q J e
( )sol,d
k ki Kg=( )sol,
T dk k ki KD = FW%%
11 sol, sol, 1 1 sol,
11 1 sol, sol, sol,
d d dk k k k k k k k k k
d d d dk k k k k k k k k
e J e Q i i Q J e i
J Q Q J e Q i i i
34
IDENTIFICATION DESIGN Methods:
Least Squares (Recursive)▫ Noise rejection▫ Poor time varying parameter
tracking capabilities (add covariance reset and forgetting factor – dynamic or static)
▫ New research suggest variable-length moving window*
Gradient Based▫ Sensitive to noise▫ Better time varying parameter
tracking capabilities▫ Gradient step size must be chosen
carefully
MAPPING LEARNING & CONTROL
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Parameter "a" Estimation
Time [sec]
a
TrueBroydenRLSRLS w/EW
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4Parameter "a" Estimation
Time [sec]
a
TrueBroydenRLSRLS w/EW
Identification of time varying parameter for a linear system(*) Jiang, J. and Zhang, Y. (2004), A Novel Variable-Length Sliding Window Blockwise Least-Squares Algorithm for Online Estimation of Time-Varying Parameters, Intl. J. Adaptive Ctrl & Signal Proc., Vol 18, No. 6, pp. 505-521.
T ˆky
35
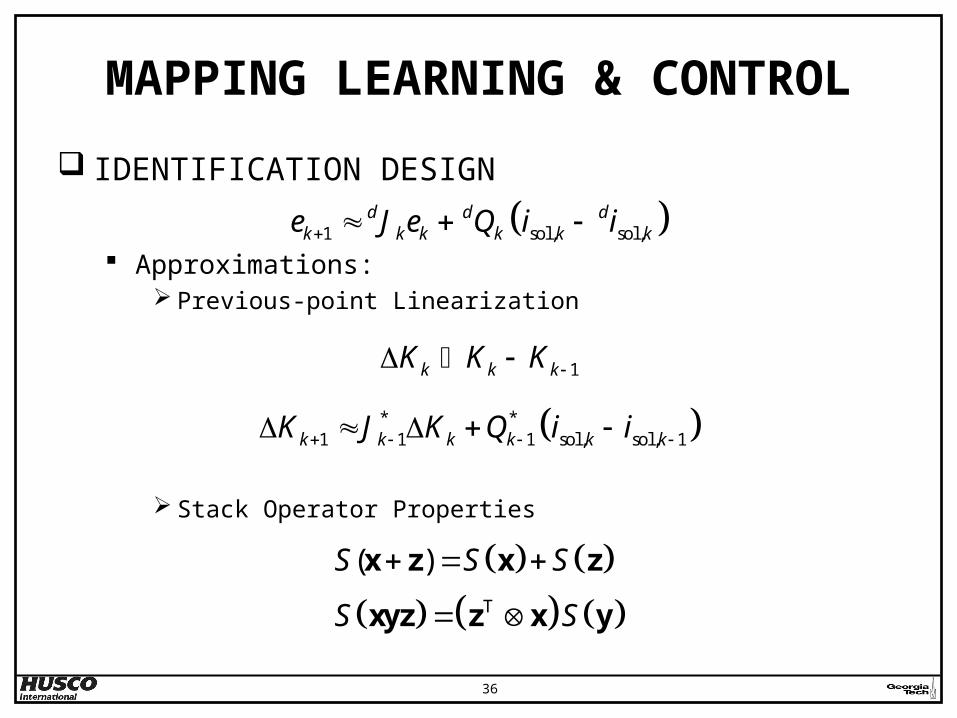
IDENTIFICATION DESIGN
Approximations: Previous-point Linearization
Stack Operator
MAPPING LEARNING & CONTROL
1 sol, sol,d d d
k k k k k ke J e Q i i
* *1 1 1 sol, sol, 1k k k k k kK J K Q i i
1k k kK K K
TT T T1 2 1 2( ) , wheren nS x x x x x x x x
36
IDENTIFICATION DESIGN
Approximations: Previous-point Linearization
Stack Operator Properties
MAPPING LEARNING & CONTROL
1 sol, sol,d d d
k k k k k ke J e Q i i
* *1 1 1 sol, sol, 1k k k k k kK J K Q i i
1k k kK K K
T
( )S S S
S S
x z x z
xyz z x y
37
IDENTIFICATION DESIGN
Approximations: Previous-point Linearization
Stack Operator Properties
MAPPING LEARNING & CONTROL
1 sol, sol,d d d
k k k k k ke J e Q i i
* *1 1 1 sol, sol, 1k k k k k kK J K Q i i
1k k kK K K
11 1
1
n
m mn
x x
x x
z zx z
z z
38
IDENTIFICATION DESIGN
Approximations: Previous-point Linearization
MAPPING LEARNING & CONTROL
* *1 1 1 sol, sol, 1k k k k k kK J K Q i i
* *1 1 1 sol, sol, 1
* *1 1 sol, sol, 1
TT * *1 sol, sol, 1 1
TTT * *sol, sol, 1 1 1| |
k k k k k k
n k k n k k k
k n k k k n k
k n k k n k k
K S J K S Q i i
S I J K S I Q i i
K I S J i i I S Q
K I i i I S J S Q
1 sol, sol,d d d
k k k k k ke J e Q i i
39
IDENTIFICATION DESIGN
Approximations: Previous-point Linearization
MAPPING LEARNING & CONTROL
* *1 1 1 sol, sol, 1k k k k k kK J K Q i i
TTT * *1 sol, sol, 1 1 1| |k k n k k n k kK K I i i I S J S Q
1 sol, sol,d d d
k k k k k ke J e Q i i
T ˆky
How are (dJ,dQ) and (J*,Q*) related?
40
PRESENTATION OUTLINE
MOTIVATION TOPIC REVIEW SETUP IMPROVEMENTS MAPPING LEARNING & CONTROL EXPERIMENTAL RESULTS FUTURE WORK CONCLUSIONS
41
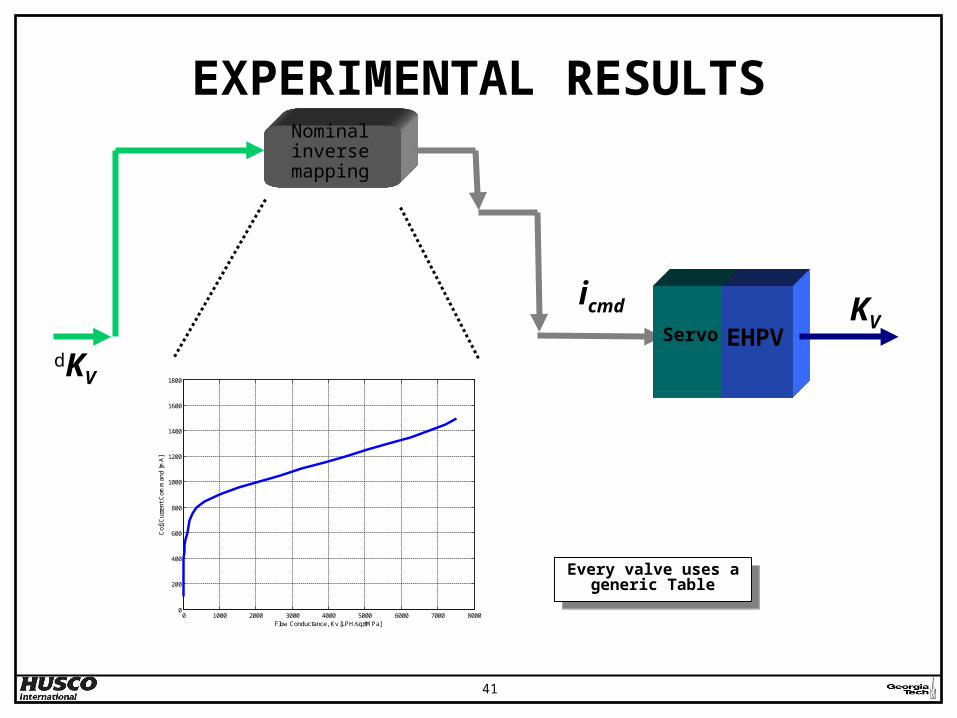
Nominal inverse
mapping
KVdKV
icmd
EXPERIMENTAL RESULTS
EHPVServo
0 1000 2000 3000 4000 5000 6000 7000 80000
200
400
600
800
1000
1200
1400
1600
1800
Flow Conductance, Kv [LPH/sqrtMPa]
Coi
l Cur
rent
Com
man
d [m
A]
Every valve uses a generic Table
42
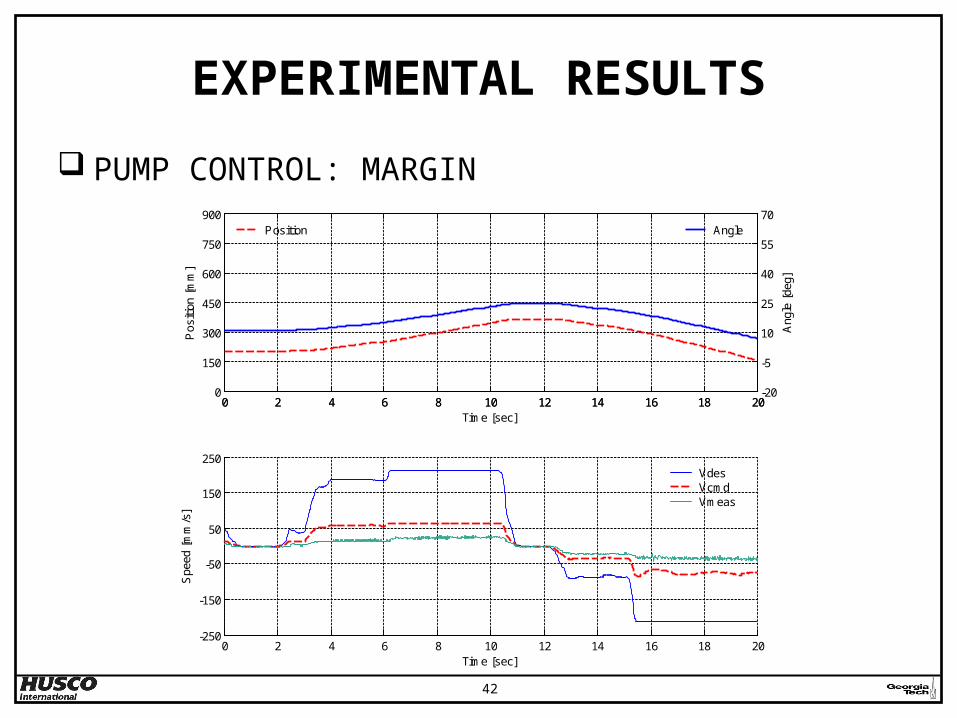
EXPERIMENTAL RESULTS
0 2 4 6 8 10 12 14 16 18 200
150
300
450
600
750
900
Time [sec]
Pos
ition
[mm
]
0 2 4 6 8 10 12 14 16 18 20-20
-5
10
25
40
55
70
Ang
le [d
eg]
Position Angle
0 2 4 6 8 10 12 14 16 18 20-250
-150
-50
50
150
250
Time [sec]
Spe
ed [m
m/s
]
VdesVcmdVmeas
PUMP CONTROL: MARGIN
43
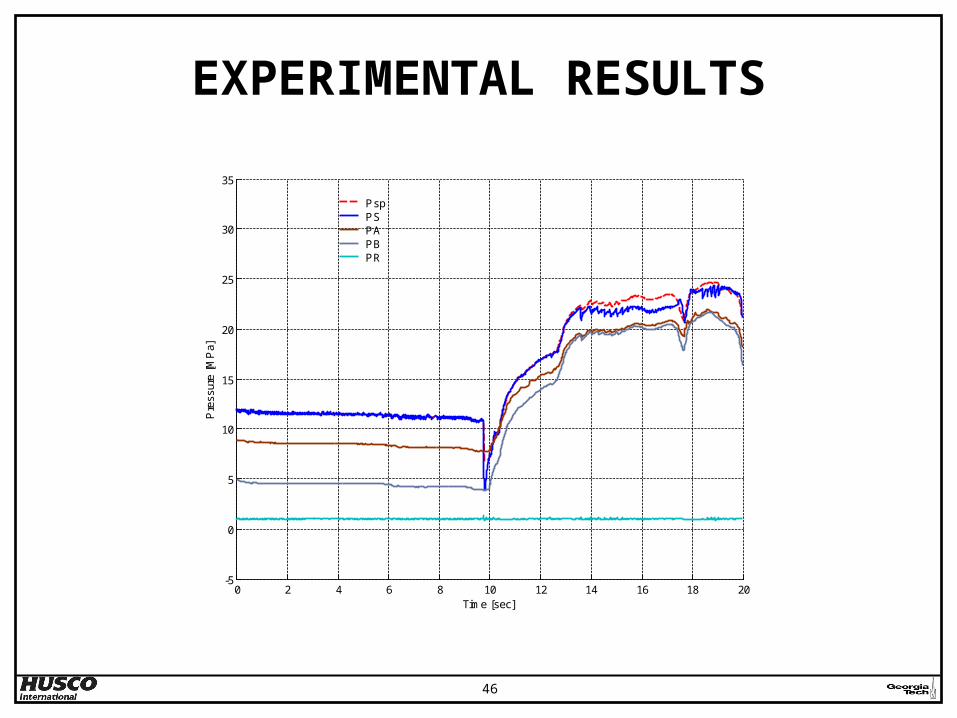
EXPERIMENTAL RESULTS
0 2 4 6 8 10 12 14 16 18 20-5
0
5
10
15
20
25
30
35
Time [sec]
Pre
ssur
e [M
Pa]
PspPSPAPBPR
44
EXPERIMENTAL RESULTS
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KSAcKSAm
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KARcKARm
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KBRcKBRm
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KSBcKSBm
45
EXPERIMENTAL RESULTS PUMP CONTROL: PS_SETPOINT
0 2 4 6 8 10 12 14 16 18 200
150
300
450
600
750
900
Time [sec]
Pos
ition
[mm
]
0 2 4 6 8 10 12 14 16 18 20-20
-5
10
25
40
55
70
Ang
le [d
eg]
Position Angle
0 2 4 6 8 10 12 14 16 18 20-250
-150
-50
50
150
250
Time [sec]
Spe
ed [m
m/s
]
VdesVcmdVmeas
46
EXPERIMENTAL RESULTS
0 2 4 6 8 10 12 14 16 18 20-5
0
5
10
15
20
25
30
35
Time [sec]
Pre
ssur
e [M
Pa]PspPSPAPBPR
47
EXPERIMENTAL RESULTS
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]KSAcKSAm
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KARcKARm
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KBRcKBRm
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KSBcKSBm
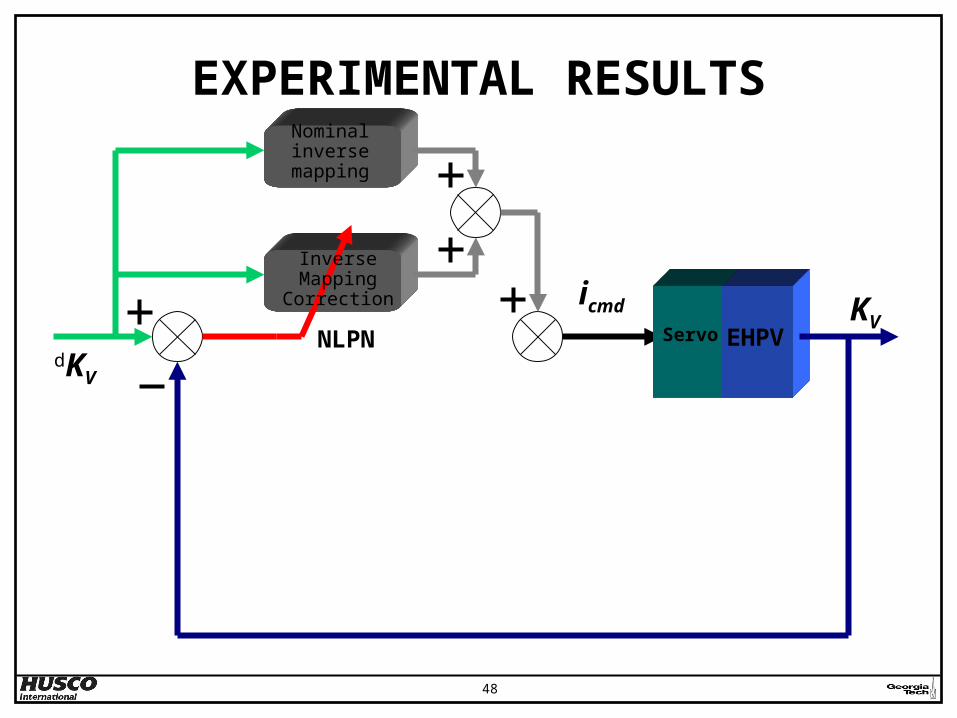
48
Nominal inverse
mapping
Inverse Mapping
Correction
NLPNKV
dKV
icmd
EXPERIMENTAL RESULTS
EHPVServo
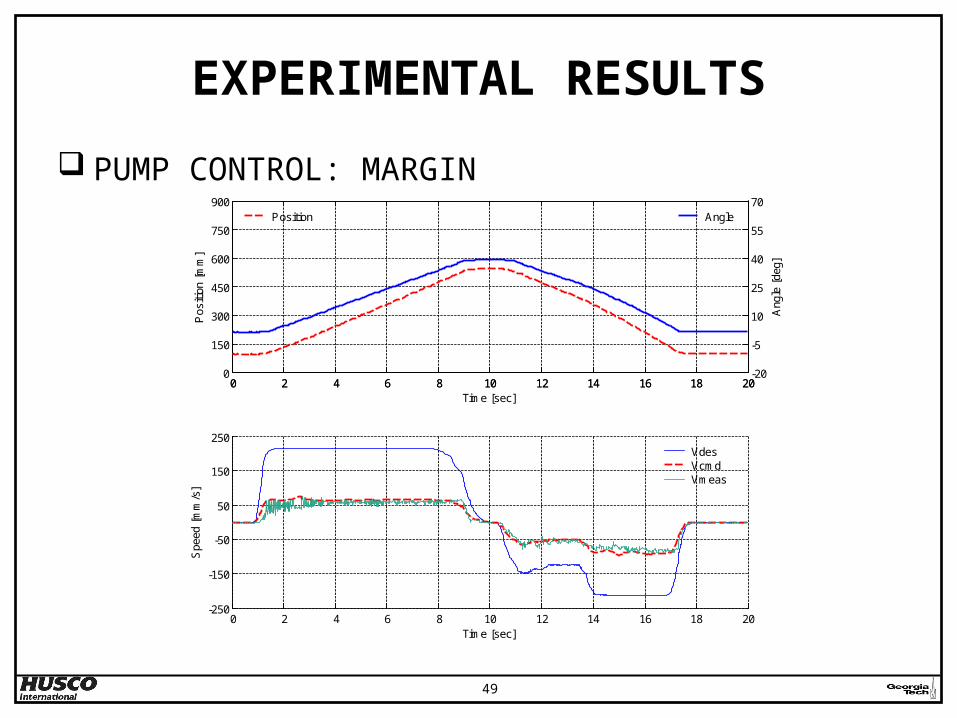
49
EXPERIMENTAL RESULTS PUMP CONTROL: MARGIN
0 2 4 6 8 10 12 14 16 18 200
150
300
450
600
750
900
Time [sec]
Pos
ition
[mm
]
0 2 4 6 8 10 12 14 16 18 20-20
-5
10
25
40
55
70
Ang
le [d
eg]
Position Angle
0 2 4 6 8 10 12 14 16 18 20-250
-150
-50
50
150
250
Time [sec]
Spe
ed [m
m/s
]
VdesVcmdVmeas
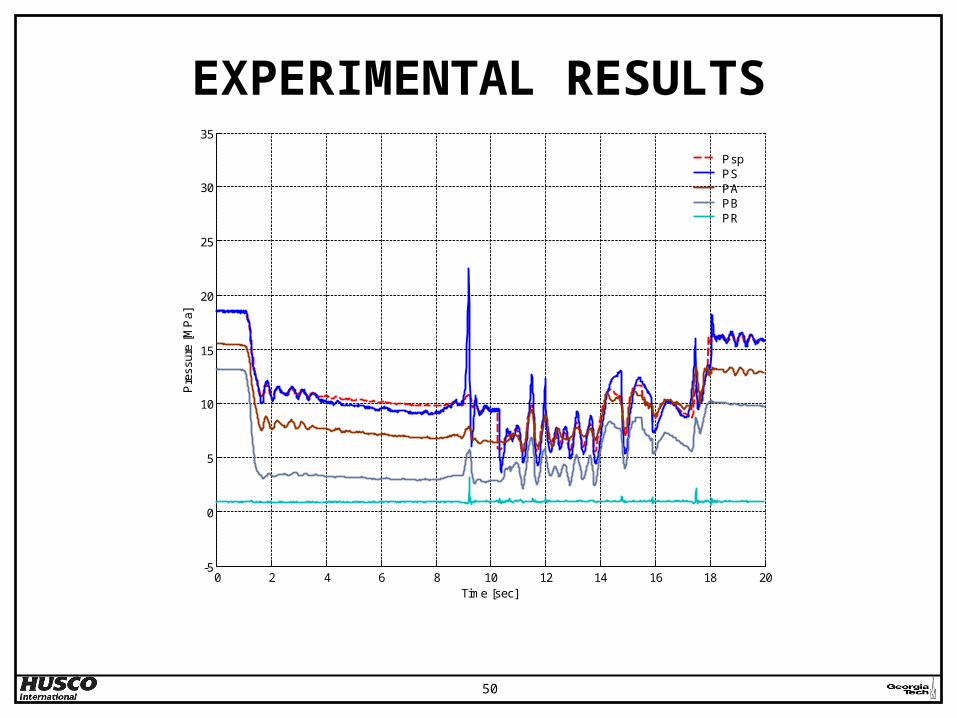
50
EXPERIMENTAL RESULTS
0 2 4 6 8 10 12 14 16 18 20-5
0
5
10
15
20
25
30
35
Time [sec]
Pre
ssur
e [M
Pa]
PspPSPAPBPR
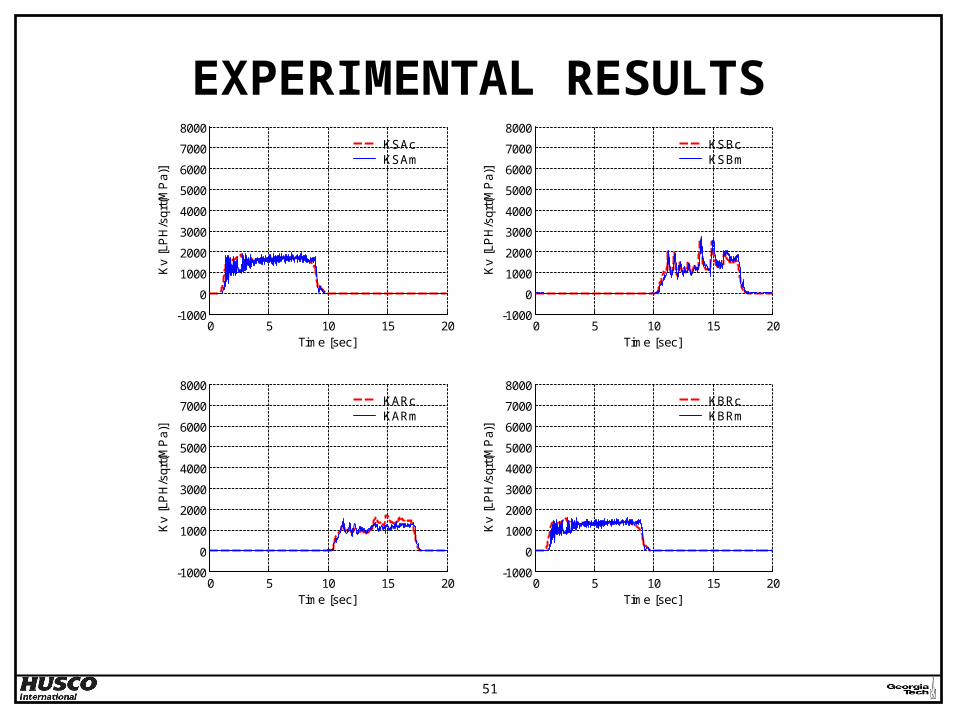
51
EXPERIMENTAL RESULTS
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]KSAcKSAm
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KARcKARm
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KBRcKBRm
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KSBcKSBm
55
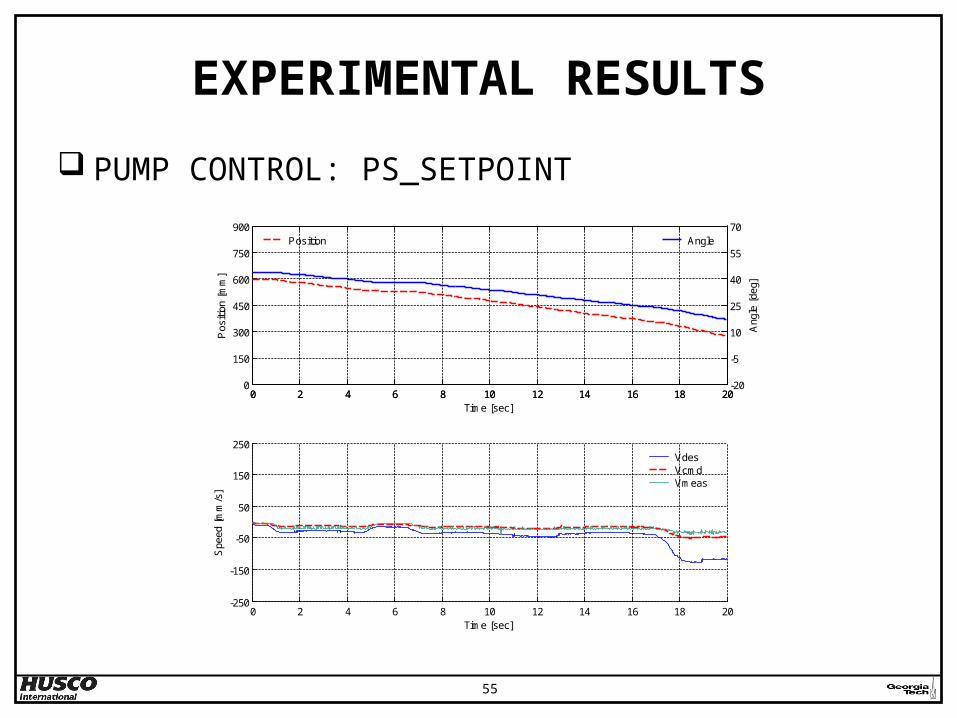
EXPERIMENTAL RESULTS PUMP CONTROL: PS_SETPOINT
0 2 4 6 8 10 12 14 16 18 200
150
300
450
600
750
900
Time [sec]
Pos
ition
[mm
]
0 2 4 6 8 10 12 14 16 18 20-20
-5
10
25
40
55
70
Ang
le [d
eg]
Position Angle
0 2 4 6 8 10 12 14 16 18 20-250
-150
-50
50
150
250
Time [sec]
Spe
ed [m
m/s
]
VdesVcmdVmeas
56
EXPERIMENTAL RESULTS
0 2 4 6 8 10 12 14 16 18 20-5
0
5
10
15
20
25
30
35
Time [sec]
Pre
ssur
e [M
Pa]
PspPSPAPBPR
57
EXPERIMENTAL RESULTS
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]KSAcKSAm
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KARcKARm
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KBRcKBRm
0 5 10 15 20-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
KSBcKSBm
58
Nominal inverse
mapping
Inverse Mapping
Correction
FIXED Proportional Feedback
NLPNKV
dKV
icmd
EXPERIMENTAL RESULTS
EHPVServo
59
EXPERIMENTAL RESULTS PUMP CONTROL: MARGIN
0 10 20 30 40 50 6015
20
25
30
35
40
45
50
55
60
65
70
Time [sec]
Ang
le [d
eg]
w/ FBw/o FB
60
EXPERIMENTAL RESULTS
0 10 20 30 40 50 60-80
-60
-40
-20
0
20
40
60
80
Time [sec]
Spe
ed [m
m/s
]
VcmdVm w/ FBVm w/o FB
61
EXPERIMENTAL RESULTS
0 10 20 30 40 50 600
5
10
15
20
25
30
Time [sec]
Pre
ssur
e [M
Pa]
Pressure Responses w/FB
PspPSPAPBPR
62
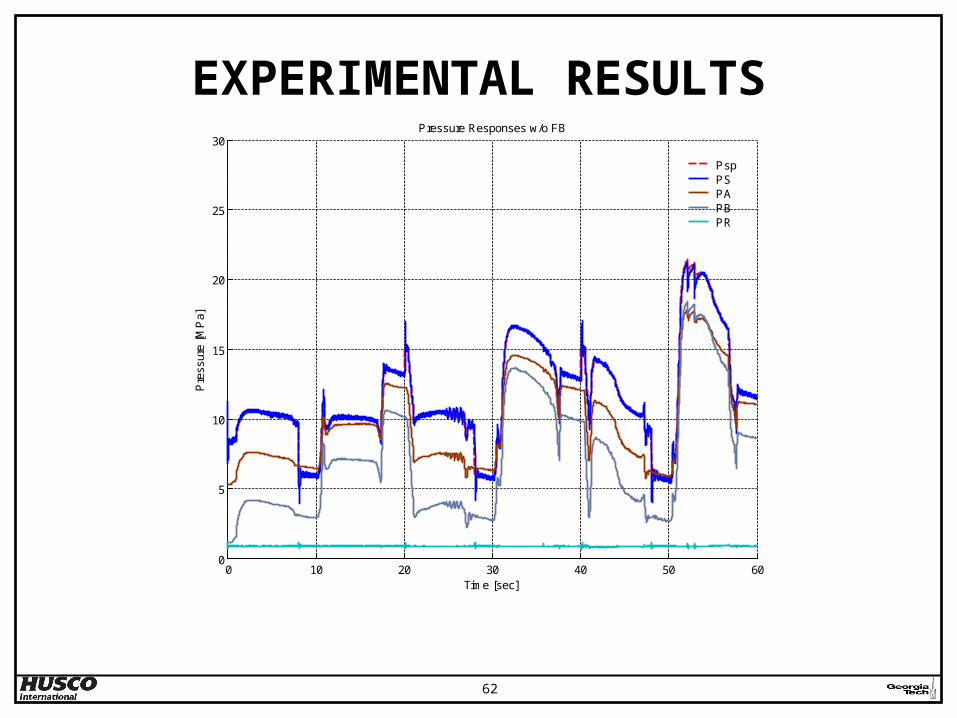
EXPERIMENTAL RESULTS
0 10 20 30 40 50 600
5
10
15
20
25
30
Time [sec]
Pre
ssur
e [M
Pa]
Pressure Responses w/o FB
PspPSPAPBPR
63
EXPERIMENTAL RESULTS
0 10 20 30 40 50 600
500
1000
1500
2000
2500
3000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
RED w/FB , BLUE w/o FB
KSAcKSAmKSAcKSAm
64
EXPERIMENTAL RESULTS
0 10 20 30 40 50 600
500
1000
1500
2000
2500
3000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
RED w/FB , BLUE w/o FB
KARcKARmKARcKARm
65
EXPERIMENTAL RESULTS
0 10 20 30 40 50 600
500
1000
1500
2000
2500
3000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
RED w/FB , BLUE w/o FB
KBRcKBRmKBRcKBRm
66
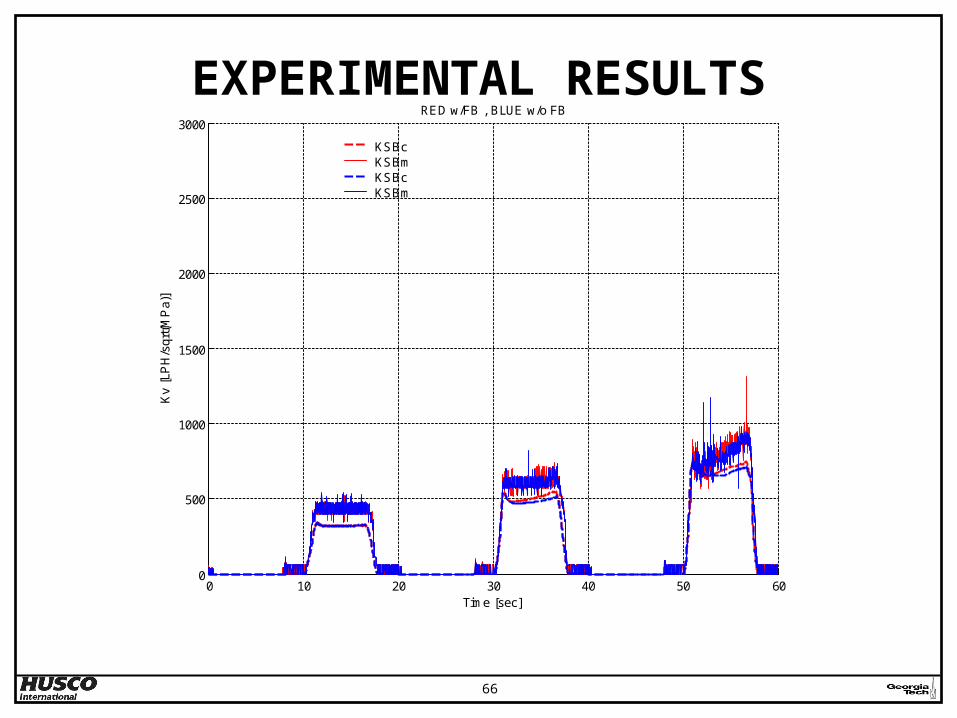
EXPERIMENTAL RESULTS
0 10 20 30 40 50 600
500
1000
1500
2000
2500
3000
Time [sec]
Kv
[LP
H/s
qrt(M
Pa)
]
RED w/FB , BLUE w/o FB
KSBcKSBmKSBcKSBm
68
PRESENTATION OUTLINE
MOTIVATION TOPIC REVIEW SETUP IMPROVEMENTS MAPPING LEARNING & CONTROL EXPERIMENTAL RESULTS FUTURE WORK CONCLUSIONS
69
FUTURE WORK
Improve EHPV performance using adaptive proportional feedback
Study convergence properties of adaptive proportional input and its impact on overall stability
Incorporate fault Diagnostics capabilities along with mapping learning
Refine pump controls
70
PRESENTATION OUTLINE
MOTIVATION TOPIC REVIEW SETUP IMPROVEMENTS MAPPING LEARNING & CONTROL EXPERIMENTAL RESULTS FUTURE WORK CONCLUSIONS
71
CONCLUSIONS The performance of the INCOVA control system under
Ps_setpoint and margin pump control was improved when using mapping learning as oppose to using fixed inverse valve opening mapping.
Satisfactory experimental results were obtained on applying feedforward learning and fixed proportional control to four (4) EHPVs
Experimental verification of improved commanded velocity achievement using mapping learning was presented
The need for good velocity sensor was observed (potential idea for customized sensor was presented)
72
CONCLUSIONS More refined code (constraints) allowed better control Unresolved Issues still exist with parameter estimation
and adaptive proportional control portion Experimental validation of faster mapping learning with
proportional feedback in place (fixed) Learning grid can be fixed based on curve shifting