22
GROUP 7: MANOPRIYA SADASIVAN - 679579101 SACHIN GEORGE - 669999209 VIJAYKARTHIK THYAHARAJ - 679898807 VIRTUAL AUTOMATION Project - 3 Automated Parking System
| Date post: | 22-Oct-2015 |
| Category: |
Documents |
| Upload: | vijay-karthik |
| View: | 81 times |
| Download: | 1 times |

GROUP 7:MANOPRIYA SADASIVAN - 679579101SACHIN GEORGE - 669999209VIJAYKARTHIK THYAHARAJ - 679898807
VIRTUAL AUTOMATIONProject - 3
Automated Parking System
Searching for an empty parking space in a crowded city is a major hassle that we face today.
Driving around in circles looking for an empty parking spot not only leads to increased traffic congestion, but also increase in fuel consumption and air/noise pollution.
By carrying out this project we hope to bring to light a solution that could solve this problem.
SCOPE
Automated Parking System• Drop your car off at the entrance and no need to worry
about parking it.
• Saves you the trouble of manually searching of an empty parking space, hence a time saver.
• The car is passed to a translational/rotational platform which carries the vehicle to the nearest empty space in sequence, thus increasing overall efficiency
• To model an automated parking lot using Cosmo Worlds and make the logical connections via Simulink on MATLAB
• Create a touch sensor that brings a car toward the parking gate and disable this touch sensor while the simulation sequence is in progress.
• Upon arrival of car, the gate opens and the signal light turns from red to green.
• The car moves from the gate to a platform within the parking structure
Objectives
• Write a program in MATLAB to detect the nearest empty parking space.
• Move the platform carrying the vehicle to the respective empty parking spot’
• Bring the platform back to the original position and re-enable the touch sensor.
• Clicking the touch sensor again brings in another car and the process continues until the parking lot is completely filled.
Objectives (contd.)
• Once filled, no more cars should be allowed to pass through the gate, and ‘Full’ to be displayed
• Create touch sensors for each parking space that when enabled, removes the parked car at that space and returns it to the exit
• At the exit, a board displays the respective fare for each car by calculating the time it spends inside the parking lot
Objectives (contd.)
Work Distribution
• Manopriya Sadasivan : - Modelling of parking structure, entrance gate, roads, cars, buildings and all other environment features.
-creating VRML links for all interpolators and sensors to facilitate motion .
• Vijaykarthik Thyaharaj : Create bus variables and Matlab functions to store and work on information regarding position availability and time in values of the cars.
- create logic sequence to disable the touch sensors when car is in motion in and out of the parking lot.
• Sachin George : - Bridge connections between the source and the sink by determining the proper start times, and other values.
-create a counter variable to count the number of cars coming in, and to limit the number of cars based on the space available from the function.
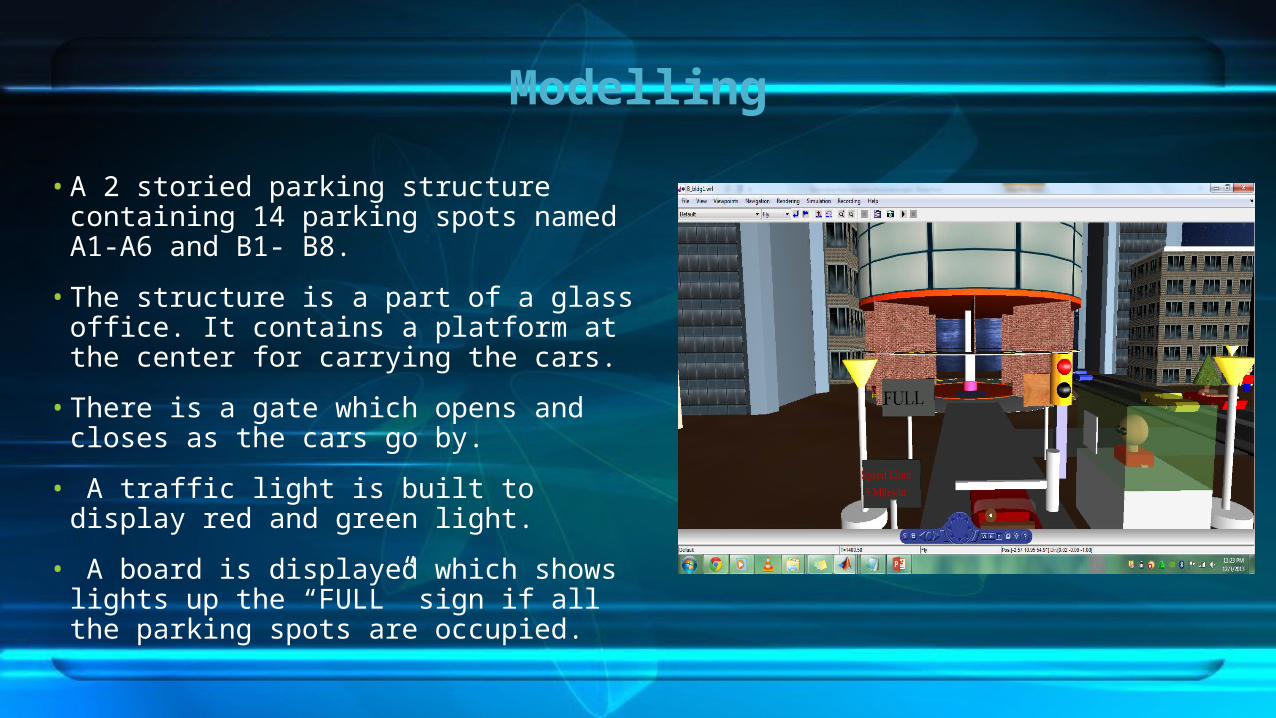
• A 2 storied parking structure containing 14 parking spots named A1-A6 and B1- B8.
• The structure is a part of a glass office. It contains a platform at the center for carrying the cars.
• There is a gate which opens and closes as the cars go by.
• A traffic light is built to display red and green light.
• A board is displayed which shows lights up the “FULL” sign if all the parking spots are occupied.
Modelling
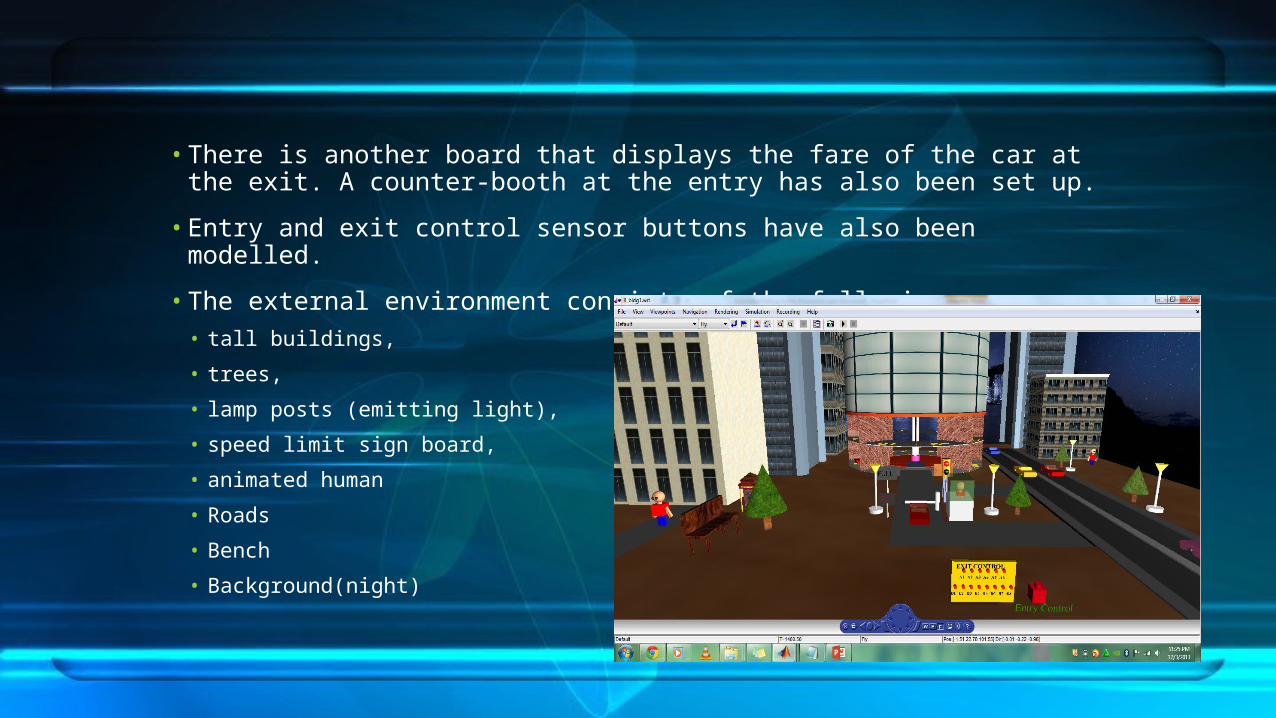
• There is another board that displays the fare of the car at the exit. A counter-booth at the entry has also been set up.
• Entry and exit control sensor buttons have also been modelled.
• The external environment consists of the following:• tall buildings,
• trees,
• lamp posts (emitting light),
• speed limit sign board,
• animated human
• Roads
• Bench
• Background(night)
• The cars movement towards the parking lot and inside is executed using position and orientation interpolators in COSMO worlds.
• The gate opens and closes using orientation interpolators.
• The traffic light changes color by diffusing it using color interpolators.
• The board displaying “FULL” and Fare also use the same logic .
• The cars continuously move on the main road by using loop method.
Motion in VRML
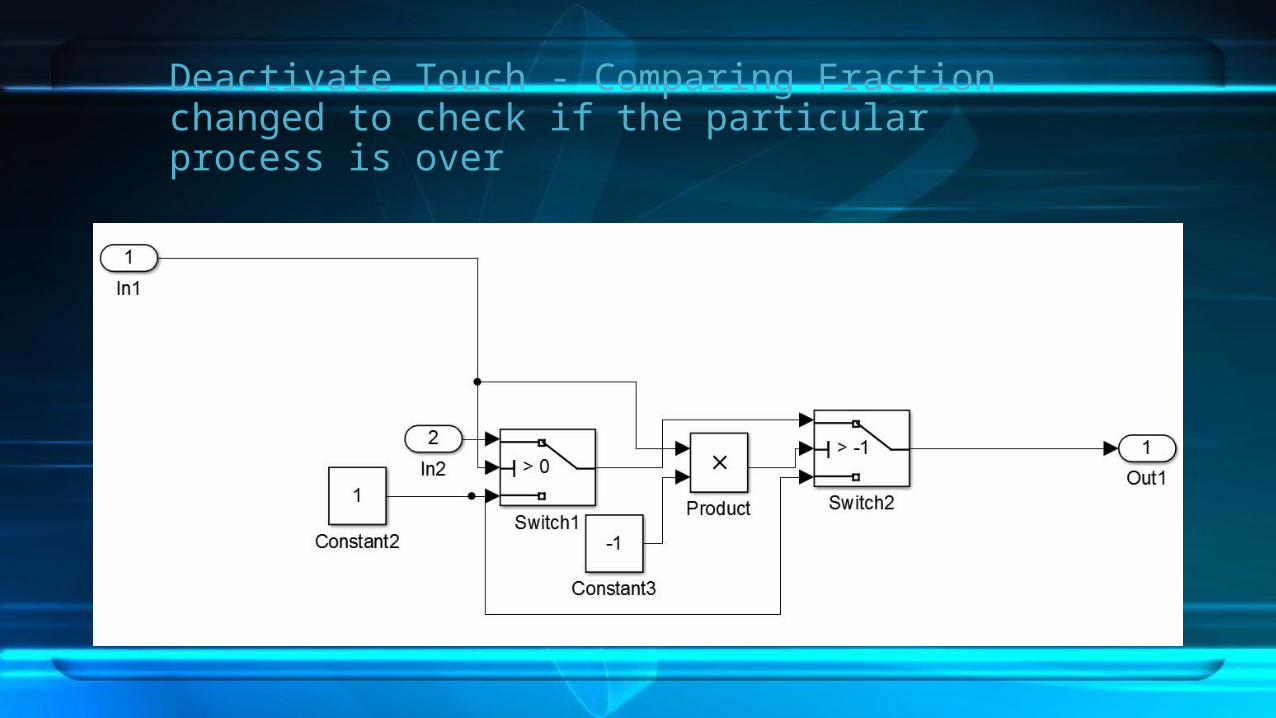
Deactivate Touch - Comparing Fraction changed to check if the particular process is over
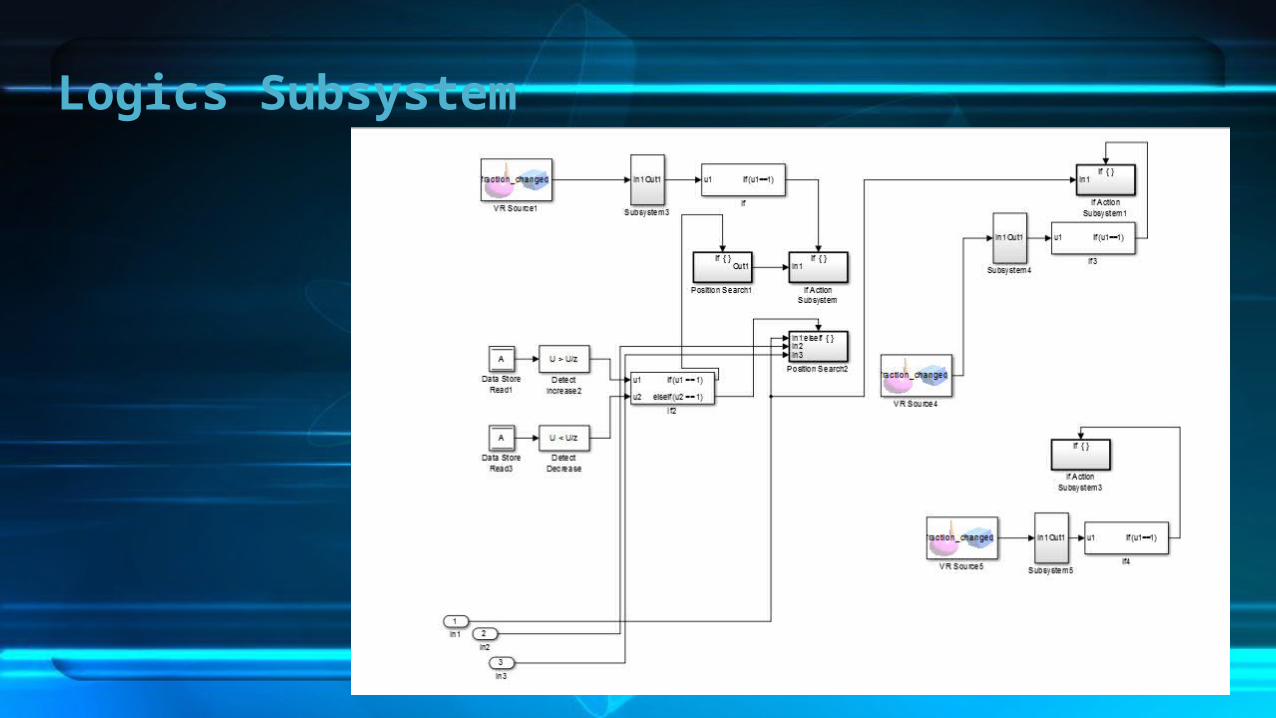
Logics Subsystem
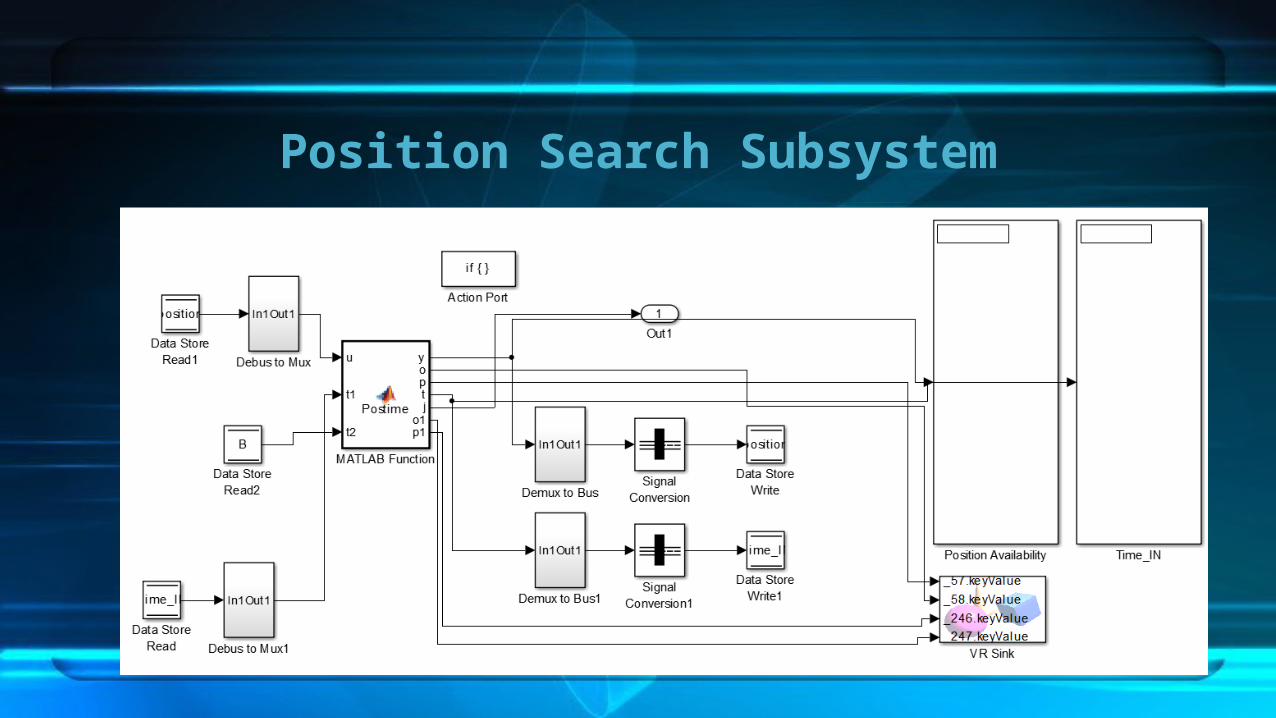
Position Search Subsystem
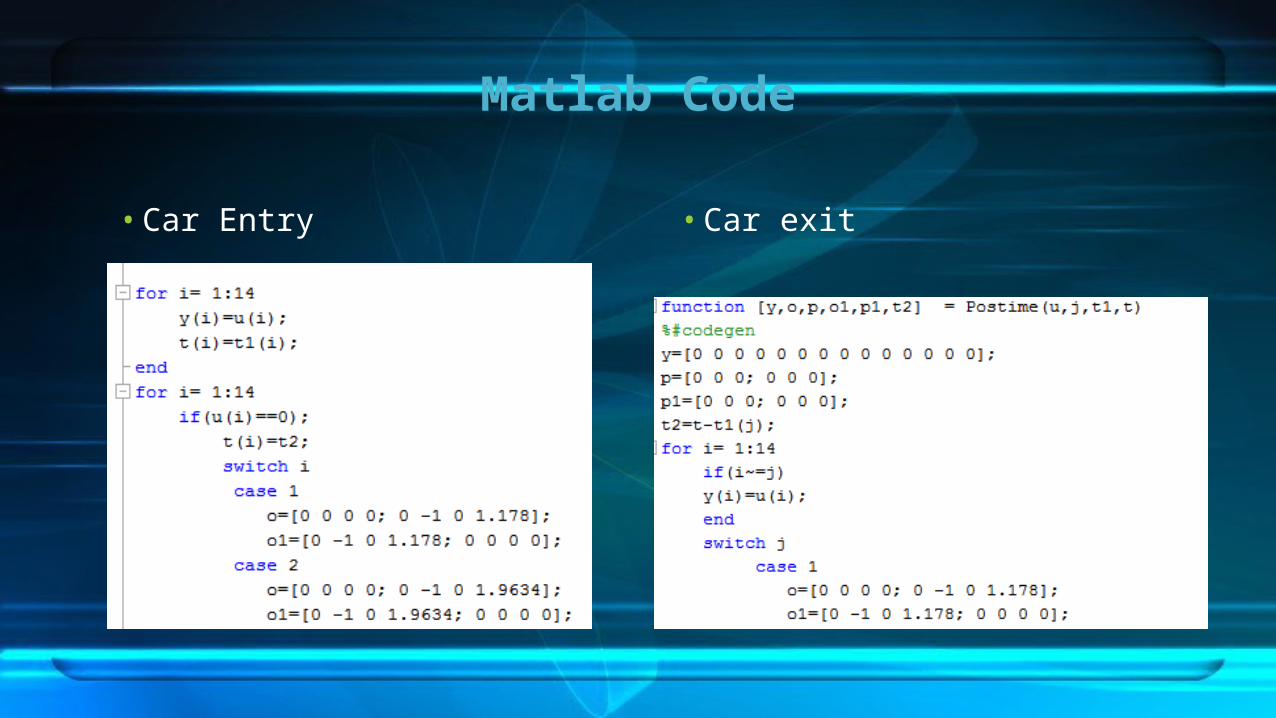
• Car exit• Car Entry
Matlab Code
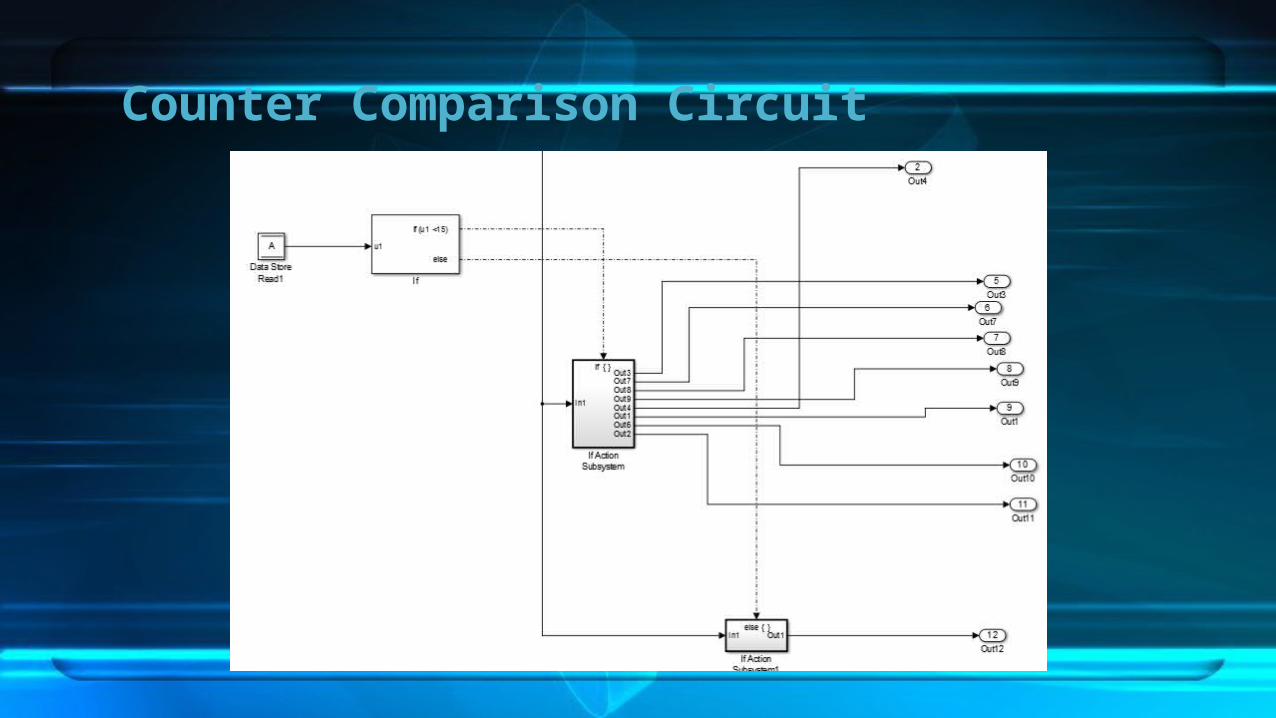
Counter Comparison Circuit
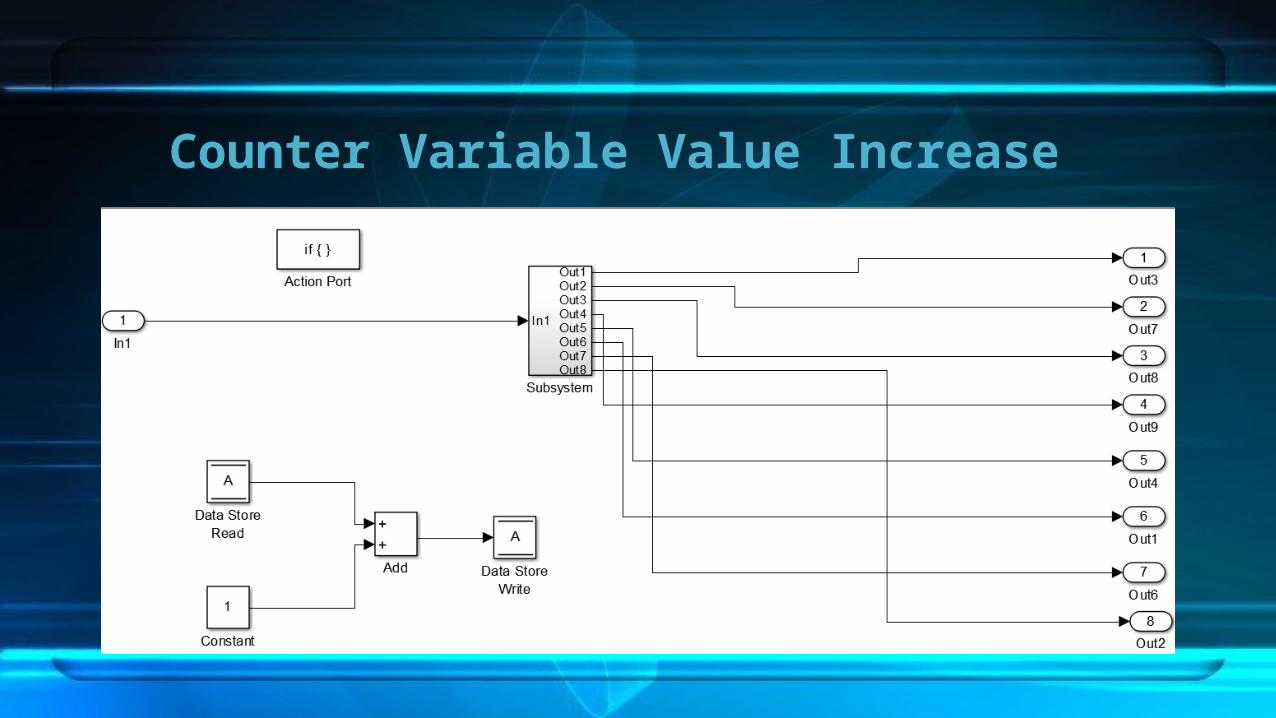
Counter Variable Value Increase
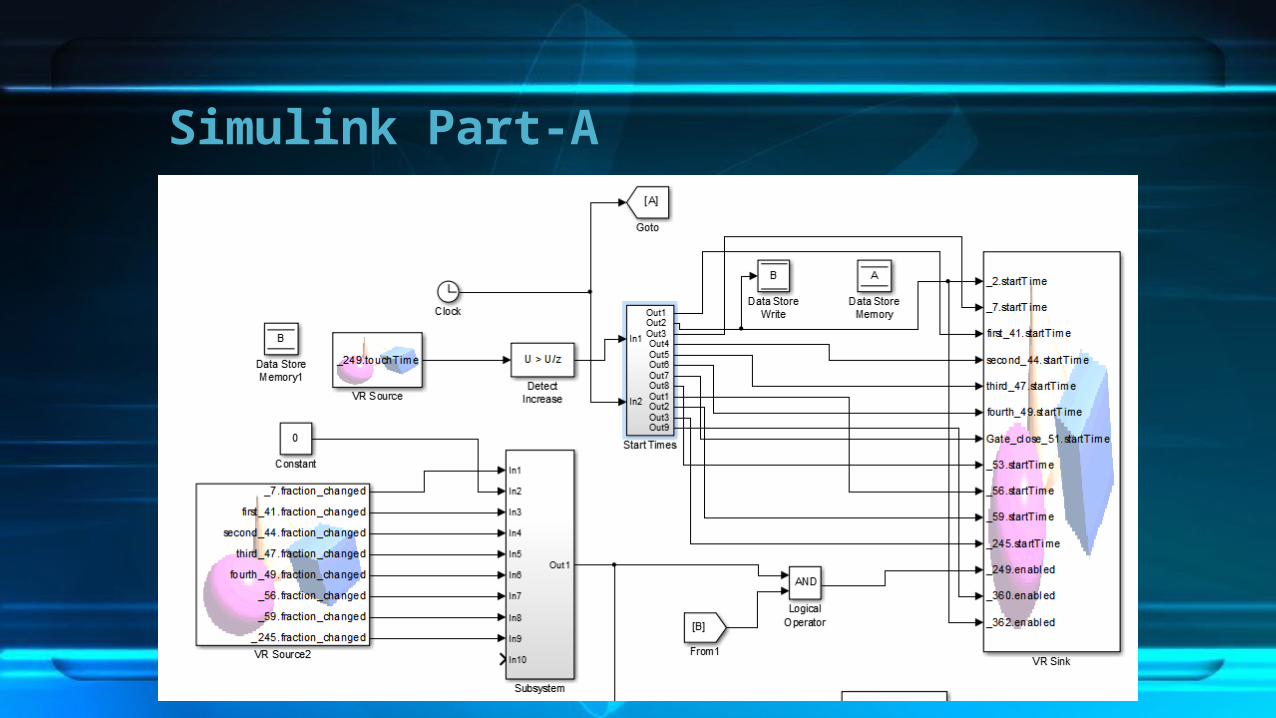
Simulink Part-A
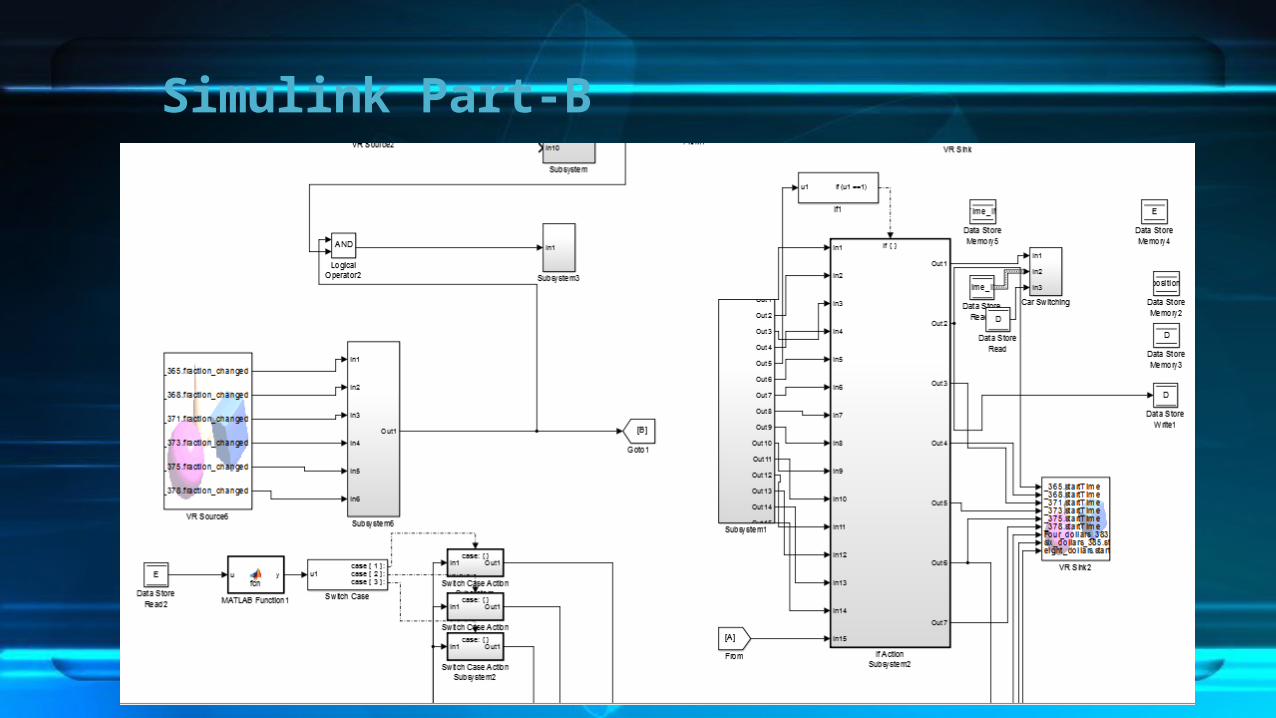
Simulink Part-B
• To increase the number of available parking spaces to accommodate more number of cars
• Reduce wastage of space by making each parking spot more compact so as to accommodate only one car
• To use shortest path algorithm to make sure that the car is taken to the nearest available parking spot, thus making the system more energy efficient
• To obtain the exit value input from keyboard instead of using touch sensors
Further Enhancements That Could Be Made
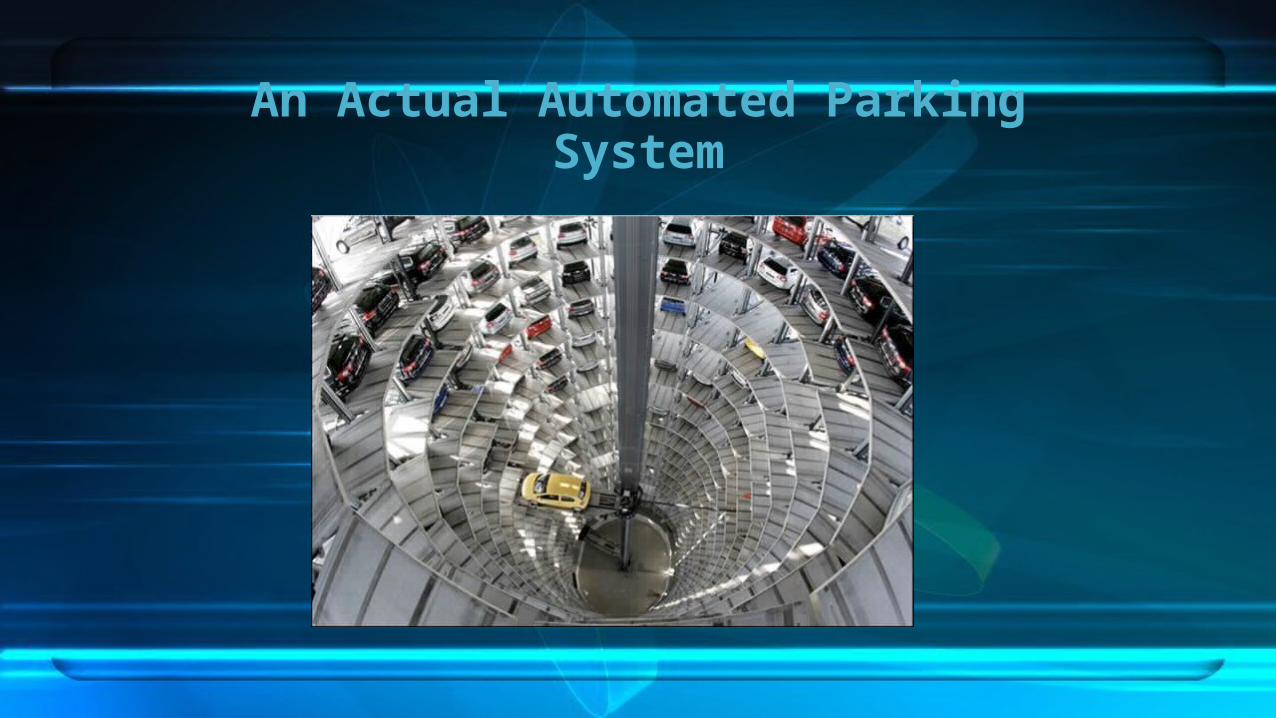
An Actual Automated Parking System

Thank You!!!