A DEFLECTION VARIABL1?, TECHNIQUE FOR THE OPTIMTSATION OF FIBRE—REINFORCED COMPOSITE STRUCTURES by J J . Mc KE OWN Li. In A thesis submitted for the degree of Doctor of Philosophy in the Faculty of Engineering, University of London, March 1977.
Transcript
A DEFLECTION VARIABL1?, TECHNIQUE FOR THE OPTIMTSATION
OF FIBRE—REINFORCED COMPOSITE STRUCTURES
by
J J . Mc KE OWN
Li. In
A thesis submitted for the degree of Doctor of Philosophy in
the Faculty of Engineering, University of London, March 1977.
ACKNOWLEDGEMENT
I gratefully acknowledge the help and support of the following
in the production of this thesis.
My wife, Deirdre, for her encouragement and understanding on
those occasions when family concerns had to take second place
to the demands of research. Mr. Frank Matthews, my supervisor
in the Department of Aeronautics at Imperial College, for his
advice and encouragement. My colleagues at the Numerical
Optimisation Centre: Mr. S.E. Hersom, Dr. L.C.W. Dixon,
Dr. M.C. Bartholomew-Biggs, Dr. J. Gomulka - all of whom
contributed useful advice as well as acting as 'sounding
boards' - and Mrs. Mary Hunter, who typed most of the
manuscript. Hertfordshire County Council, who sponsored me,
and finally the Computer Centre at Hatfield Polytechnic, who
provided computing facilities.
SUMMARY
This thesis is concerned with the optimisation of multilaminar
composite sheets. The introductory chapter defines the problem
and discusses briefly the main difficulties it entails. The
problem is set in perspective by a brief background discussion
of the related but simpler isotropic one,together with some of
the methods currently available for its solution. A new formulation
is proposed which involves defining the nodal deflections of •
the structure as the primary optimisation variables;the name
'Deflection-Space Formulation' is adopted for this approach.
It is shown in Chapter 2 that the problem is
decomposed into an outer subproblem,in the space of the deflections,
and an inner one in terms of the original design variables. The
latter problem is that of finding the structure of minimum volume
for a given deflection;it is shown to be a Linear Programming
one in an infinite number of variables. This form allows useful
insights to be gained into the characteristics of optimal
structures. An algorithm,named the Tunctional Linear Programming'
algorithm(FIP) is proposed for the solution of the fixed-
deflection subproblem and some numerical results given.
Chapter 3 is devoted to the further development of the FI.P
algorithm and to an analysis of the designs produced by it.
In chapter 4 the properties of the objective
function of the outer subproblem are investigated,and the problem
of designing maximum-stiffness structures is expressed in deflection-
variable form. An algorithm is proposed for designing such
structures and numerical results are presented.
The basic deflection-space formulation is
extended in chapter 5 to include multiple alternative load cases
and direct constraints on stresses,and to include lower limits
upon the total thickness of material in any finite element.
Finally,conclusions are drawn and some suggestions made for the
future development of the deflection-space approach and the
Functional Linear Programming algorithm.
TABLE OF CONTENTS
CHAPTER 1
1.1: Introduction to the problem 1
1.2: Mathematical statement of the problem 4
1.3: The application of numerical optimisation
techniques to structural synthesis 11
1.4: A new formulation 22
CHAPTER 2
2.1: The deflection-space formulation 27
2.2: Implications of the deflection-space
formulation 31
2.3: The deflection-space formulation applied
to fibre-reinforced structures 36
2.4: The Functional Linear Programming algorithm 63
2.5: Numerical results 83
CHAPTER 3
3.1: Introduction 96
3.2: The test programs 96
3.3: Analysis of optimal designs 99
3.4: Performance of theFLP algorithm 142
3.5: Factors affecting the convergence of the
FLP algorithm 149
3.6: Theoretical convergence of the FLP algorithm 166
3.7: Conclusion 168
-iv-
CHAPTER 4
4.1: Introduction 170
4.2: The analogous pin-jointed structure 171
4.3: The dual FLP problem 180
4.4: Properties of the function0) 191
4.5: The maximum-stiffness problem 201
4.6: An algorithm for finding maximum-
stiffness structures 206
4.7: Numerical results 213
CHAPTER 5
5.1: Stress constraints 250
5.2: Multiple load cases 254
5.3: Avoidance of empty elements 256
5.4: The general problem 258
5.5: Summary and conclusions 261
Reference List 269
AMEDIcn-
2.1: The Functional Linear Programming algorithm
2.2: The One-dimensional minimisation routine
• 3.1: Element stress and stiffness routine
3.2: Routine to compute deflections
274
284
289
297
-v-
4.1: Routine to compute derivatives of W(€) 303
4.2: The linear search routine 307
4.3: Implementation of the maximum-stiffness algorithm 312
4.4: Two additional papers 317
-vi-
LIST OF TABLES
Chapter 2 Page
2.1: Simplex Tableau 43
2.2: Functional Simplex Tableau 54
2.3: FLP on Single-Node Truss,Iteration 1 58
2.4: 1/ 2 59
2.5: 11 Final Tableau 60
2.6: Material Properties 83
2.7: Single Element model: Loads and Deflections 85
2.8: Final Design 86
2.9: 4-Element Model: Loads and Final Deflections PR
2.10: Initial and Final Designs 89
2.11: 16-Element Model,Initial and Final Designs 90a
2.12: 32-Element Model,Initial and Final Designs 92
2.13: Comparison of Initial and Final Volumes,
Various Meshes 94
Chapter 3
3.1: 32-Element Model: Initial and Final Designs 104
3.2: II II It Deflections 105
3.3: 11 11 ,1 Stresses 108
3.4: Cantilever Problem I: Initial and Final Designs 116
3.5: ,1 11 It Stresses 118
3.6: Cantilever Problem II: 1, Designs 123
3.7: 11 tt 11 Stresses 124
3.8: Sheet with Hole: 11 Designs 131
Page
3.9: Sheet with Hole: Initial and Final Stresses
132
3.10: Rate of Convergence,Cantilever Problem II
144
3.11: Sheet with Hole 147
3.12: Number of Iterations Needed,Two Problems 149
3.13: Accelerated Convergence,Sheet with Hole 159
3.14: Analysis of CPU Time 162
3.15: Comparison of Unaccelerated,Accelerated and
'Loose' Convergence Rates 165
Chapter 4
4.1: Base Coordinates,Single Node Truss 172
4.2: Optimal Designs,Various Deflections 174
4.3: Comparison,Computed Derivatives and
Divided Differences 200
4.4: Material Properties 213
4.5: 4-Element Model: Comparison of Final Designs 217
4.6: Deflections 217
4.7: Stress Characteristics of Three Designs in
the Sequence from Starting Point A 218
4.8: Design Sequence A 224
4.9: 225
4.10: Final Designs A and B 227
4.11: Stresses,Final Designs A and B 228
4.12: Comparison, Final Sheet and Trusses 234
4.13: Sheet with Hole: Reduction in Waisting 243
4.14: Final Design and Stresses 246
4.15: I I Sequence of Equal Stress Volumes 247
4.16: Effect of different Allowable Shear Stresses 248
LIST OF FIGURES
CHAPTER 1
Page
5
7
1.1: Typical Element
1.2: Notation for Stresses and Strains
CHAPTER 2
2.1: The Single-Node Truss 50
2.2: Typical Distribution 56
2.3: Final Truss 61
2.4: Typical Distribution XL (0'.) 63
2.5: Typical Basic Set of Distributions 71
2.6: Triangular Sheet Problem 84
2.7: Single Element Model
2.g(a): 4-Element Model 87
(b): 11 " Final Layout 88
2.9: 16-Element Model 90
2.10: 11 11 Final Layout 90
2.11: 32-Element Model 91
2.12: Final Layout 92
CHAPTER 3
3.1: Scheme of Test Programs 97
3.2(a): Cantilever Problem 100
3.3(a): Sheet with Hole Problem 100
3.2(b): Cantilever Model 101
3.3(b): Sheet with Hole Model 102
3.4(a): 32-Element Model,Final Layout 106
3.4(b): II I, ,Final Thicknesses 106
3.5(a): I/ iv ,Initial Values of C 109
3.6(a): II II ,Initial Values of IceLpi 109
3.5(b): II II ,Final Values of C 110
Page
3.6(b): 32-Element Model,Final Values of 104.4 110
3.7(a): Cantilever Problem I,Initial Layout 115
3.7(h): 11 11 Final Layout 115
3.7(c): n 11 Final Thicknesses 117
3.8(a): n 11 Initial Values of C 117
3.8(b): 11 n Final Values of C 119
3.9(a): 11 11 Initial Values of loewl 119
3.9(b): n 11 Final Values of /oll.pl 120
3.10(a):Cantilever Problem II,Initial Layout 125
3.10(b): 11 11 Final Layout 125
3.10(c): 11 11 Final Thicknesses 126
3.11(a): /I 11 Initial Values of C 127
3.11(b): It II Final Values of C 127
3.12(n): It II Initial Values of 1044,/ 128
3.12(b): 1/ n Final Values of)044 128
3.13(a): Sheet with Hole,Initial Layout 133
3.13(b): n " Final Layout 134
3.13(c): /1 " Final Thicknesses 135
3.14(a): II " Initial Values of 1011.p/ 136
3.14(b): 11 " Final Values of iolt..p/ 137
3.15(a): It " Initial values of C 138
3.15(b): 11 " Final Values of C 139
3.16: Graph Showing Convergence on Cantilever II 145
3.17: II II Sheet with Hole 147
3.18: Variation off) and r 154
3.19: Minimum ofp ,Unconstrained 154
3.20: II II Constrained 154
3.21: Sheet with Hole,Accelerated vs.Unaccelerated
Convergence 160
4.1: Single-Node Truss
4.2:
4.3:
4.4:
4.5:
4.6:
-x-
4.13:
CHAPTER 4 Page
172
,Function W(b) 175
Physical Infeasibility 176
W(§.) as Locus of Minima 177
Contours of WOO 179
Plot of Dual Feasible Region,
Horizontal Deflection 185
Sketch of Dual Feasible Region,
Horizontal Deflection 186
Variation in W(b) with Load 187
As 4.8,Complete Set of Bars 188
Plot of Dual Feasible Region,
=1.0, =0.5 189
Sketch of 4.10 190
Flow Chart,Maximum Stiffness
Algorithm
210
Operation of Maximum Stiffness
Algorithm 211
4.7: 11
4.8:
4.9:
4.10:
4.11:
4.12:
4.14: 4-Element Model,Convergence 215
4.15: " Design Sequence 216
4.16: Cantilever Problem,Idealisation 221
4.17: 11 II Convergence 223
4.1R(a): II 11 Final Layout A 229
4.18(b): It 11 II 1, B 229
4.19(a): II It Final Thicknesses A 230
4.19(b): II II to It B 230
4.20: Equivalent Truss 233
Page
4.21: Sheet with Hole, Convergence 236
4.22: II It Sequence of Step-Lengths 237
4.23: II It Sequence of values of 238
4.24: 1, " Free-edge Displacements 240
4.25(a): " it Final Layout 241
4.25(b): " It Final Thicknesses 242
4.26: It n Sketch of Volume Distribution 243
4.27: vt II Final Values of 244
4.28: u ti n ,, C 245
CHAPTER 5
5.1: Minimisation of Reduced Gradient in Presence
of Stress Constraints 254
-1—
Chapter 1
Section 1.1 Introduction to the problem
Perhaps the most exciting recent development in materials
technology, from a structural engineering viewpoint, has been
the introduction of high strength fibre-reinforced composites.
Such materials typically consist of a matrix material, such as
a resin or a metal, in which fibres are imbedded. The function
of the matrix is partly structural and partly to protect the
fibres from surface damage which might reduce their strength.
In principle, of course, such materials are not new;
reinforced concrete, fibreglass and even wood are examples of
materials which conform to some extent to this general description.
Such well-established materials, howeve", have seldom provided
any serious competition for metal alloys in applications where
very high strength-and stiffness-weight ratios were required,
such as aerospace construction. This state of affairs has been
radically altered by the appearance of very high strength fibres
whose strength depends fundamentally on the purity of the material
from which they are made. Because of this purity the strength
can begin to approach the theoretical maximum for the material
involved as determined by its molecular bonds. Undoubtedly the
examples which are of the greatest practical importance at the
present time are boron-on-tungsten (usually simply referred to
as boron) and carbon fibres. These are usually imbedded in an
epoxy or polyester resin. Boron/epoxy composite material, for
example, is available as a pre-impregnated (pre-prep) tape.
This allows very accurate laying up to be done previous to
final curing of the structure; it also means that the relative
volumes of fibre and matrix are not variables of the design
-2—
problem.
Like many innovations which offer obvious advantages over
existing practice, fibre-reinforced materials have turned out to
require considerable development in order to overcome the practical
problems associated with their use.Such problems as brittleness
and fatigue will no doubt be solved in due course, and do not
form any part of the subject matter of this work. However,
structural materials with highly directional properties carry
with them a more fundamental design difficulty which might be
termed an embarrassment of opportunity. This stems from the
need to tailor the material distribution in such a way that the
fibre directions are closely aligned with the directions of
principal stress. If this is done, the resulting structure may
be stronger and stiffer than its steel or titanium equivalent;
if not it may be very much weaker. To illustrate this point,
consider a unidirectional tensile stress field 6 in a composite
material whose fibres make an angle be with the direction of 6 .
The usual strength-of-materials formula gives the shear stress
relative to axes along and transverse to the fibre direction as
(6 sin 260)/2. For values of SO up to five or six degrees,
then, the ratio of induced shear stress to longitudinal stress
is about equal to the misalignment angle in radians. In order
to fully use the ultimate tensile strength of a material whose
shear strength is equal to one tenth of tensile strength (a
fairly typical figure), the fibres must in this case align with
the stress direction to within five degrees at most. A further
drawback is that the ultimate tensile stress transverse to the
fibre direction, which is mainly a property of the matrix material,
in typically very low compared with the ultimate tensile strength
- 3 -
of the fibres. Hhdcock ( 1.1 ) makes the following observation:
'To achieve 25 to 40 per cent weight saving, the types of
structural configurations that have been used for metal structures
must be radically changed. Weight savings of this order cannot
be achieved by mere materials substitution. Full advantage must
be taken of the anisotropic characteristics of the material and
its capability of providing strength and load paths for optimum
load distribution within the structure. This will only be
achieved by designing for the composite material from the outset
of the design process'.
In the same vein, C.W. Rogers ( 1.2 ) says: 'The advent of
composites portends many changes in aircraft design practice.
The designer finds that in addition to a structure, he also has
a material that he can and must design for optimum performance'.
Thus the need to develop techniques for the optimum design
of composite structures seems to be fairly well established. It
happens that the emergence of this need has coincided with
considerable steps forward in the development of tools and
techniques for structural design. The most important new tool
is of course the digital computer; and the two most important
developments in technique are undoubtedly Finite Element methods
of analysis and Numerical Optimization techniques. The availability
of a large-capacity digital computer is a prerequisite for any
practical attempt at synthesising real structures using the two
latter techniques. Fortunately the progress in micro-miniaturisation
and in production techniques is rapidly bringing about a situation
in which even small organisations will beable to afford in-house
computing facilities on a level with those which only large firms
could enjoy a few years ago. It seems unlikely, therefore, that
14.
progress in structural design will be held back by lack of computers;
neither is it likely, given the present state of the art of finite
element analysis, that there will be serious difficulties in
producing realistic mathematical models of the behaviour of
composite systems.
This thesis will describe the results of an investigation
into the problem of applying numerical optimization techniques
to the design problem posed by fibre-reinforced composites. A
new formulation of this problem will he proposed which seeks to
overcome some of the difficulties inherent in the problem. In
addition, algorithms will be surgested for solving the problem
thus formulated; results of numer7:cal experiments into the
performance of these algorithms will also be given.
:vection 1.2 Mathematical Statement of the Problem
The structural design problem which will form the subject of
this work can be defined as follows: A two-dimensional sheet is
loaded and supported in its own plane. It is to be composed of
layers of an orthotropic material; the number of such layers is
not prescribed, and may vary with position on the sheet. At any
point the layers are distinguished from one another by the
orientation of their axes of symmetry. The design problem, then,
is to determine at every point on the sheet the number of layers,
the orientation of axes of symmetry which define them, and their
thicknesses, such that the volume of the sheet is minimal subject
to constraints on stresses and displacements within. Relating
this statement to the properties of fibre-reinforced materials,
it will be seen that each layer would consist of a stack of
-5-
1 t Lb
FIGURE 1.1
-6-
pre-preg tapes, all with their fibres parallel(Fig.1.1). It is assumed
that such tapes are available in sufficiently small thicknesses
that the total thickness of a layer can be Ire;arfled as a continuous
variable. A minor assumption is that the distribution of fibres
within a tape is uniform through its thickness. This ensures
that a bonded stack of n tapes, each of thickness t, is equivalent
to a single tape of thickness nt. Finally, it will be noted that
the problem of the optimum ratio of matrix to fibre volume is
not considered: this choice is prescribed by the known properties
of the tapes from which the sheet is to be made.
Before going on to derive the model which describes the
behaviour of the structure as a whole, it will be useful to
consider the stress-strain relationships of the baSic unidirectional
material from which it will be constructed, and in particular how
the orientation of the fibre axis affects the stiffness referred
to a fixed system of axes. Figure 1.2 shows such a undirectional
material. The suffices L, T refer to axes along and transverse
to the fibre axis respectively. The relationship between stress
and strain referred to these axis is:
rE
r 1
11 /2-E/2. o EL
16-7-
V2.1 Ell &22. 6r
641.7 0 121
6
where II__le E22 = Y
21 E11. Thus the quantities E11, E22,
G12 and
Y12 (or21
) serve to define the stiffness properties of the
material completely. Tsai and Pagano (quoted by Haicock, ref.li)
gave the following relationships for the same quan tities related
to the axes x, y at an angle 0 (between X and L).
-7-
6L , el., Eli
Gr,ET,E22. A 6y, E V
\
Figure 1.2
Qt, Q12.
6x
---41 Q21
[
Q)-2.
Q61 Q62.
7. 2.,
-8-
(The subscripts on 9 used by Tsai and Pagano are retained although
they conflict with standard notation for a 3 x 3 matrix). The
quantities Q.. are defined in terms of lc and 9 as follows: ij
Q„ = 3 Ul + Uz 4. U3 Cos 2.0 4- U4 Cos 449
Q11 3U 4- U2 - U3 Casio + U4 C. 40
Q.1.4 = Qiz = U1 - Cos 40
Q66 = Ui - U4 Cos 4
C-4/6 = A U3 Sin I& 4* U4 Sin 4-0
= = U3 5ih 26 - 04 4-0
where:
U/ =
Uz =
U3 =
U4
=
oY (Ell 4 11. ÷ .921 912, E21.)
I f
± Is , r
2.tk Y' 412. - k. v/f c.11 1742, 621. ))
ty, - Elz) th 1 (Er, E21 — 6)20 E-17 + 4 /Pg12.)
-.11111'21
For the purposes of the present work the matrix Q in equation
1.2 will be rewritten in an equivalent form which expresses more
conveniently its dependence on 19 :
Q = Q o + CA, 40 + Qi 5L4 49 4- Q3 Cos 2 6 + Q4 S z.n 2B /.3
-9-
where:
3U, + U2. U, - Ut o
0, -- I.J., — kJ, 30.,+1.), o
o 0 U,+ Us:, 4..
Qi
-
04 _(.4.
o
- U4
th
0
0
0
-U4
0 o U4
..-
[
0 o -U4
] U4 - U4 0
U3 0
ck --- 3 [
- U5 0
] 0 0 0
.... o 0 U3 /2. --
Q4 0 0 U3/2.
U3 /2 03 A 0
It remains to consider the form of a typical finite element
stiffness matrix. The total stiffness of the sheet is given by
the equation:
1. 4
Hare a. is a transformation matrix associated with the i'th finite
element; there are Ne
such elements and there are L.1 lavers in '
the i'th. The matrix13 is the stiffness of the j'th layer in
the i'th finite element; its value depends on the geometry of
that element and on the fibre angle e and the layer thickness
t.. It can be computed from the well known formula:
-10-
i lt.: == ott C) ici. aLv .... t., , L , ....
V
where v is the volume of the i, j'th layer; qf i is a vector of
interpolation functions (note that it depends only on the
element geometry and is not specific to the layer itself); and
Qii is the matrix of stress-strain coefficients for the layer
which depends on 0 in the way defined by equation 1.2. Indeed,
substituting 1.3 in 1.5and performing the integration will
result in the following expression:
[.
-k 6 -= ti +0,i, . rk i.. CoS 4 0 i ' Z1,1, Si-n 40 i
4- 4Z3,i, Cos 2O + 44)i, St:" leij 1
1.6
Note that the matrices 13. , r=0,1, ..., 4, are specific to the
finite element and not to the layer; thus they are determined
once the finite element mesh is defined. Thereafter the
stiffness matrix for any layer in an element can be computed
simply by substituting the appropriate values of 0i and t..
The total stiffness matrix for an element composed of Li layers
is therefore:
LI:
• = -1? • *e:' Cos 4.e ee.c. j
J=1 Equation 1.6 is clearly of a form that makes it fairly easy to
compute the effect of altering ti or during the design process.
j
The form is independent of the particular choice of finite element
chosen, although different choices will result in different values
for then . 0. component matrices. Finally, it will be observed
k
thatalthoughiR..islinearinti.,it is highly nonlinear in the
fibre angle 0 ij; this is of course a significant feature from
1.5
the point of view of optimization.
The problem is now sufficiently well defined to be stated
as follows:
5.t. Cs 4 o
ti! > (.)
eL. c J
Li, INTEcex
L z 1,2,
= f,Z. — L i'
5 1,7.,•
• I.
The constraints Cs may he functions of stress nr displacement:
for the moment their form will not be restricted in any way.
Problem 1.1Lis a nonlinear mixed-integer programming one.
In the next section the application of numerical optimization
techniques to such problems will be briefly considered.
Section 1.3 The application of numerical optimization techniques
to structural synthesis
Numerical optimization (or mathematical programming) is
concerned with the numerical solution of problems of the following
form :
F(
.5. t • CZ (X) 0i.=1, z , ...1
Cs (3) 0 1.4.1 ) . • •fri
3: eT ri F,C, E R I
-12-
In this general statement the objective function F and the
constraint functions Ci may be linear or nonlinear.
Although the problem of functional minimization has interested
mathematicians for centuries, the large scale development of
numerical algorithms had to await the development of digital
computers. The first case to receive attention was that in
whichFradC. ire all linear functions; this is of course the
linear programming case first considered by Kontorovich (1939)
and later by Koopmans and Danzig (ref.1.3). The immediate
applicability of the Simplex algorithm to problems in the fields
of economic planning and operational research has led to rapid
developments in linear programming and has helped focus attention
on the more general optimization problem. The result has been
the accumulation of a vast literature on the subject, which is
continually being extended as new applications and theoretical
results are found. Dixon (ref.1.4) gives a concise survey of
the state of the art in 1973; any attempt here to give a
general description of methods available for solving the
problem defined above would only result in a duplication of
such work and would in any case cover material not immediately
relevant to the problem in hand. In addition it would fail to
take account of methods which have been especially developed for
the otructural synthesis problem and do not fall under the heading
of mathematical programming techniques. In order to avoid this
difficulty, the rest of this section will describe available
techniques only as they appear to relate directly to the
structural problem. This approach will also enable the problem
of structural design in fibre reinforced materials to be seen
Ne_
L:: 1
Cs (ti,) 4 0
ti, ?'- 0
-13-
in perspective, particularly in relation to the corresponding
problem for isotropic materials. Finally, in what follows one
further restriction will be respected, namely, that only the problem
of large scale structural synthesis will be considered. In this
context the term 'large scale' has two quite independent meanings,
both of which apply. Firstly, in the sense in which mathematical
programmers normally use it, it means 'having a large number of
constraints and/or variables'; secondly, in the specific context
of structural design, it has a sense which excludes detail
design. Thus, in the field of aerospace structures, the methods
which will be discussed would usually be more suitable for the
design of complete assemblies such as wings or fusela ges than,
say, individual panels. This distinction corresponds to the
normal practice in aerospace design offices, where the general
level of stresses is usually determined using a coarse finite
element mesh and the detail design is completed using these stress
levels as a starting point. In computational terms, the detail
design problem usually has a smaller number of variables
(i.e. is 'small scale' also in the other sense of the term)
but is more nonlinear than the large scale problem and often
involves stability constraints and variables which may only take
discrete values.
The large-scale isotropic problem can be expressed as follows:
1.8(i)
L7. 1, 2. , . . . Ne
• ci,
Problem 1.8 can be compared directly with 1.'31 it can be seen
to he a simpler one. The nonlinear variables 0 have completely
disappeared, as have the integer variables Li. The problem has
therefore been reduced to a great extent both in size and in
complexity. However it remains far from trivial, the reason
being that the constraints, which are once again limits on
stress and deflection, are nonlinear in the thickness variables ti.
The scale of problem 1.8 is perhaps best illustrated by
considering the history of efforts to solve it. Numerical
approaches began to be investigated in the early 1960's, and
the progress made in the decade to 1970 has been well summarised
by Gellatly (ref.1.5). An early algorithm of Gellatly himself
will illustrate both the problem and a typical approach to its
solution (ref.1.6). It was based on the method of feasible
directions due to Zontendijk, and proceeded as follows.
Let tk he some estimate of the solution to 1.8 which
satisfies the constraints, and let dk be a search direction at
that point. That is, the next estimate is to he given by:
E.Pt dk
where oC k is a step length whose value is to be determined. In
Gellatley's algorithm two distinct kinds of search direction are
employed. In the case where tk
is strictly on the interior of
the feasible region, that is, where none of the constraints is
satisfied as an equality, the search direction is determined
solely by the function V. In fact, the search direction is merely
the negative of the gradient of V - a simple steepest descent.
This step therefore exploits the linearity of V. In the case
-15-
C (tk) = 0 for some set Sk
of the indices, consider the following
matrix:
1-4 4k. E. EV V 11 -V Cs (SEs
Hk
consists of columns which are the gradients of the objective
function and the active constraints, evaluated at tk. These
columns can be taken to define a space in which the search
direction is represented as follows:
dk= H ip 1. 9
where /3 is the set of coordinates of dk in the space defined
by k. We now make a step such that the value of the objective
function V remains unaltered, while the values of the critical
constraints are not increased. These requirements can be
expressed as:
1.10
where E El, ...,6„ J and C 0, i = 1,7, ..., Sp,
(The number of active constraints is Sn ). Gellatly assigns the
value 1 to thelE. and, combining 1.9 and 1.10 solves the following
set of linear equations to determine the coordinates of dk:
6 t 1-1' H i< (3 E
Clearly this set of equations is at worst positive semidefinite
rind, if nonsingular, can he solved by a method such as Cholesky
decomposition. However, singularity will occur if any of the
constraint gradients are linearly dependent, and must occur
either if tk
is a solution (since the Kuhn-Tucker conditions then
require that H p = 0) or if Sn > Ne -1
There must therefore
-16-
be safeguards in the computer program to prevent trouble arising
in these circumstances.
Following the computation of dk, the step-length a4 must
then he determined in some way to enable tk+1
to be computed.
The process ends when some criterion such as a Kuhn-Tucker
condition is satisfied or when the step length oe is sufficiently
small.
The algorithm summarised above, which is known as Gellatly's
optimum vector method, may be taken as a fairly typical direct
method of solving the mathematical programming problem 1.8.
Other feasible direction methods exist, notably Zoutendijk's
original one. This differs from Gellatly mainly in the way in
which it selects a search direction when tk is on the boundary
of the feasible region; specifically, it employs a linear
programming approach to optimise the search direction. Again,
there exists another class of direct methods ('direct' because
the constraints are considered as such and not: transformed
previous to solution). This in the class of Gradient Projection
methods, in which the gradient of the function is projected onto
the boundary of the active constraints, followed by a steepest
,lescent step on this boundary. These methods suffer not
surprisingly, from difficulties arising from nonlinearities in
the constraint functions. Since some at least of the constraints
in 1.8 are likely to be nonlinear the method seems to have
little to recommend its use. In fact the problem of 'hemstitching'
(as the process of moving on and off the constraints in short steps
is known) is perhaps one reason why gradient projection methods
have not gained wide popularity in the general field of
mathematical programming. This notwithstanding, Brown and Ang
-17-
(ref.1.7) have reported an application of this algorithm to
structural optimization.
The final large class of direct algorithms which have been
applied to the isotropic structural optimization problem is
that of sequential linear programming. In its simplest form,
an iteration of this consists simply in linearisinr the
constraints at the point tk and then solving the resulting
linear programming problem by standard methods. This approach
has an intuitive appeal in that it allows the very sophisticated
methods which have been developed for the solution of large
linear programming problems to be brought to bear on the non-
linear one. The advantages and disadvantages of this and more
sophisticated methods are discussed by Pope in ref. 1.8; the
sequence of linear programs approach has been used by several
workers. One aspect which is worth noting here is that
Linear Programming is the only area in which methods have been
thoroughly developed for dealing with the integer-variable case.
In addition to the direct method, there is another class
of methods which has attracted interest from structural
optimizers. This consists of methods which involve transforming
the constrained problem into an unconstrained one and then
solving it by successive applications of one of the well known
algorithms for unconstrained minimisation. The earliest forms
of the method consisted in adding functions to the objective
in order to penalise any estimate which was infeasible. One
form which was particularly attractive for the structural
optimization problem was the interior penalty function or
-18-
barrier function. A typical one is:
F E; V- rz - G
V- I
For any value of r this function increases to infinity as the
sequence of estimates tends towards the boundary of the feasible
region from the interior; on the other hand, as r tends to zero
the minimum of F tends towards the minimum of V. The procedure
is therefore to choose a value of r and minimise F as a function
of t, using some feasible starting point. The value of r is then
reduced and a further minimisation carried out, this time using
as a starting point the best point reached on the preceding step,
and so on.
The chief appeal of this approach is perhaps the fact that,
as r is decreased, a sequence of monotonically improving feasible
designsis generated. The sequence can therefore he stopped
wherever economic criteria dictate in the certain knowledge that
some gain will have been made. Another factor nddinr to the
attraction is the apparent simplicity of the approach. Tt is
not surprising, therefore, that the penalty function method has
been applied by a number of workers in the area of structural
optimization; some details are given by Fox in ref. 1.8. It
must be said, however, that the simplicity is not so great as
might appear, since some strategy must he adopted for varying
r and also for determining acceptable convergence both in the
sub-minimisations and in the overall iterative process. In
addition it is a general feature of such methods that the
unconstrained minimisation problems become more ill-conditioned
as r is decreased; see for example Murray, in ref. 1.9.
-19-
Before proceeding to consider alternative approaches which
have been applied to the isotropic problem, it is useful to
quote the following summary, due to Pope and Schmit (ref.1.R),
of the main features of the mathematical programming approach in
general.
(a) It is possible to consider the design of a structural
system rather than the design of individual elements; allowance
can be made where appropriate for quantities such as the weight
of structural connections using, perhaps, statistical information,
(b) The behavioural characteristics of the optimum design need
not be presumed, rather they emerge as a consequence of the
design procedure,
(c) A variety of failure modes in each of several load conditions
may he guarded against,
(d) Restrictions on the design variables arising from fabrication
considerations and limitations of the analysis employed can be
treated,
(e) A wide variety of restrictions on structural behaviour
including stress, displacement, buckling, dynamic and thermal
response can be dealt with,
(f) The approach is not inherently linked to weight minimisation;
that is to nay, objective functions other than structural weight
may he readily employed.
In spite of the flexibility of the mathematical programming
approach, it was found (Gellatly, 1.5) that in practice they had
one serious drawback in practical application to the isotropic
structural problem, namely cost. Computational costs per
iteration depend partly on the cost of evaluating the objective
function and constraints (function evaluations) and partly on
-20-
the 'housekeeping' operations such as the equation-solving
required by the feasible direction algorithm described above.
Indeed, much of the computation involved is concerned with
equation solving, both in the stress analysis and in the house-
keeping. It follows that the amount of computation required per
3 iteration will vary roughly as N
e where Net the number of
finite elements, may be large, of the order of several hundred.
However, in addition to this size-sensitivity of cost per
iteration, it was found that, to quote Gellatly, "The number of
iterations required, and the number of analyses per iterative
stage was found to increase more rapidly with problem size than
had been first assumed On the whole, it began to
appear that economic limits on optimization capabilities based
on numerical search methods were being reached".
This setback caused attention to be turned to another type
of approach which became known as the 'optimality criterion'
approach. Algorithms based on this approach dispense with an
explicitly formulated objective function and instead seek to
satisfy some criterion which is known (or assumed) a priori to
characterise an efficient design. Such methods are closely
related to traditional design practice; for example, one method
attempts to achieve a fully stressed design (that is, every
member fully stressed under at least one loading condition)
and in its simplest form is an adaptation for digital computer
of a standard manual method. The other main optimality criterion
used is that of uniform strain energy density.
-21-
Optimality criterion methods have two main advantages. The
first is their intuitive appeal, which is based on their
traditional background and reinforced by their simplicity. The
second is their high computational efficiency in many cases.
These advantages have led to their widespread use; Gellatly
(ref.1.5) and Kelly, Morris, Bartholomew and Stafford (ref.1.10)
give examples. However, the,:, o.Ovontgges have, in the past,
been bought at the expense of some unreliability due to a
rather shaky mathematical basis. For example, it can be shown
very easily that, given a set of nodes connected by pin-jointed
rods to form a truss or a space frame, the optimum truss for a
single loading condition will, under very general constraints
on stress and deflection, be statically determinate and therefore
fully stressed. However, counterexamples exist (e.g. Cox,Hef. 1.11)
to show that the latter condition need not be associated with
optimality when more than one load case is present, and in
general it is neither necessary nor sufficient for statically
indeterminate structures. Similarly, the uniform strain energy
density criterion is associated with structures of maximum
stiffness, and as such need not always be associated with designs
of minimum weight subject to stress and/or arbitrary deflection
constraints. Gellatly (1.5) includes an example where
oscillation occurred when an optimality criterion method was
applied to the design of a simple cantilever truss. However,
such methods certainly constitute a strong challenge to
mathematical programming as an approach to solving the isotropic
structural problem.
In the past few years the picture presented above of the
state of the art in large scale structural optimization has been
-22-
somewhat altered. The steady development of new mathematical
programming algorithms has resulted in more efficient algorithms
than those available five years ago. For example, the penalty
function approach has been made more viable by the development
of more efficient methods of unconstrained minimisation than the
early variable-metric methods such as Davidon-Fletcher-Powell.
Penalty function methods have themselves been superseded, however,
by new algorithms such as the recursive quadratic programming
algorithm of Biggs (Ref. 1.12). These developments, although
they do not yet seem to have made much impact on structural
optimization, must eventually affect the case for choosing,
between mathematical programming and optimality criterion
techniques. The dichotomy between these two approaches has
already been blurred by work such as that of Parthelomew, Morris,
Kelly and Stafford (described in ref. 1.10) and Templeman (ref.1.13)
who seek to devise methods which have the advantagesof optimality
criterion techninues combined with the rigor of mathem&tical
programming. These developments seem to hold great promise.
Section 1.4 A new formulation
The necessarily brief outline of the state of the art of
isotropic structural optimization given above will have served
to show that problem 1.8 is far from trivial. When we return to
the composite structure problem 1.1-, therefore, it is clear that
it is a formidable one. Whereas the isotropic case has one
thickness variable per finite element, the composite has one per
layer; in addition there is a fibre angle associated with each thickness.
But perhaps the most significant difference between the two is the
-23-
presence of integer variables L. in problem 1.1. It is clear
that little hope can he held out for the solution of this problem
by simple extensions of the methods already applied to isotropic
design; even if the additional nonlinearity and the mixed-integer
form are ignored, the increased size of the problem will itself
exacerbate the difficulties already described. There is
obviously a requirement for a new approach. Before considering
the form which this might take, it is interesting to examine some
attempts to solve 1.7 which have already been made.
Hadcock (in 1.1) and Rogers (in 1.2) describe applications
of Boron-Epoxy in the design of aircraft structures. Hadcock
approached the design problem by restricting the choice of fibre
angle to four - 0o, 90°, - 45°. By applying this restriction
and by making simplifying assumptions it was possible to express
the stiffness and strength of the material as firctions of the
percentage of the fibre volume in each of these tour directions.
Timing this information, design was carried out semi-manually,
using an anisotropic finite element program as a tool to analyse
trial design s. Roger's approach is rather similar; clearly it
cannot he considered an automatic design technique. An optimality
criterion approach has been made by Venkayya et al (ref.1.14).
They begin by restricting the choice of fibre angles in the same
way as Hadcock and Rogers, and in this way they avoid the integer
programming aspect of the problem. The result is a problem
similar to the isotropic one, but with more thickness variables
per finite element. In fact, this approach also avoids the
additional nonlinearity which would be present if the fibre
angles were considered as continuous variables. Thus, by
restricting very considerably the choice of fibre angles it is
-24-
possible to transform the composite problem 1.* into an isotropic
problem like 1.8. Such an inherent restriction, however, is
clearly not desirable (although in particular cases restrictions
might be imposed because of, for example, manufacturing difficulties);
in addition the resulting quasi-isotropic problem is inevitably
much larger than the corresponding isotropic one with the same
number of finite elements.
Problem 1.4 has been expressed in terms of the variables
i i t.,8.and L.. However, the physical problem can be viewed
in terms of two distinct classes of variable:
(a)Designifariablest.,9 ' . L., and j
(b) Behaviour variables 6 (deflections or displacements)
and 6 (stresses). ay.
Here 6 is a vector of size Nd
in the case of a single loading
condition, where Nd is the number of degrees of freedom of the
structure. The stress in a layer is defined by three components, NQ
so the total number of stress variables is equal to
Lrl
The two classes of variables play different traditional roles.
In the analysis problem (in which variables (a) are given) only
the behaviour variables remain to be computed. In the design/
optimization problem, however, the design variables must first
he determined. However, because design normally involves
constraints on behaviour, the behaviour variables must also
be computed. The distinction between the two sets of variables
tILerefore more blurred in the optimization case then in the
analysis one. There is, however, a more fundamental definition
of variables to be made in the optimization context, namely, the
choice of optimization variables. The choice for these has often
-25-
fallen by default on the design variables, perhaps because it is
these variables in which the design must finally he expressed
for fabrication. However, it is by no means obvious that the
design variables are in fact the hest choice of optimization
variables. This is a point which seems to have received relatively
little consideration in the literature. One well known paper in
which it was discussed was that of Reinschmidt et al (ref. 1.15).
They consider a very simple structure and optimise it using simple
transformations of the basic design variables, for example,
reciprocals. They found that the efficiency with which a range
of algorithms solved the problem was significantly affected by
the choice of transformation, and they drew the conclusion that
a transformation should be selected which tends to linearise the
constraints even where this makes the objective function more
nonlinear. Although the problem considered was a very small one,
this recommendation will be borne in mind.
The remaining chapters of this work will he devoted to a
more thoroughgoing change of formulation, namely, to the choice
of t. the displacement vector, as the optimization variable.
some advantages of this approach are immediately apparent; for
example, the constraints will normally be specified as
simple functions of 6 (often nothing more than upper limits 0%0
on the absolute value of some of its elements); and even the
stresses will always be simpler functions of 6 than of the ti
design variables. The difficulties are, however, equally
obvious. To begin with, the very simple linear form of the
objective function of 1.7 will be sacrificed. A more conceptual
difficulty arises from the loss of contact with the physical
-26-
variables of the design. Although any design will, in the absence
of instability, posess a unique deflection under a given load, it
is not true that the same deflection-load pair will serve to define
a structure. It will be necessary therefore to devise a means of
inferring a unique, or near unique, design from a given deflection
and load. An additional source of potential difficulty is that
as a search proceeds in the space of the deflections, regions
may be reached corresponding to deflections for which no design
exists for the given load - for example, the negative energy half-
space.
It is hoped that in the following chapters these potential
difficulties will be shown either to be illusory or, at worst,
tractable. It will be shown, for example, that the problem of
uniquely relating a design to n load-deflection pair can itself
he posed as an optimization problem which it is not difficult to
solve, and which absorbs the integer aspect of problem 1.4. This
imposes a two-level structure on the problem, with an inner and
an outer subproblem. A very useful byproduct of this formulation
will be seen to be the insight which it affords into the nature
of the optimal structure; for example, it becomes immediately
clear that certain very simple upper limits exist upon the
total number of layers in the structure and, independently, upon
the number in any finite element in the optimal structure. These
limits arise solely from the choice of finite element mesh and
are quite independent of the particular constraints on stresses
and/or deflection that may be applied or on the particular linear
function being minimised. Above all, however, it will he shown
that the formulation leads to simple computational techniques for
solving the problem of optimizing multilaminar composites.
-27-
Chapter 2
2.1 The deflection - space formulation
In chapter 1, the problem of optimising fibre-reinforced
structures was introduced, against a background of the current state
of the art of structural optimisation. It was pointed out that the
nature of kl4P materials introduces two main difficulties which are not
present for isotropic materials: namely, an inteFPr variable aspect
associated with the problem of finding optimal numbers of layers in
oncb region of the structure ; and an additional number of variables,
file fibre angles, which are nonlinear in their effect on the constraints.
It is clear that a new formulation of the problem is called for which
directly addresses these difficulties, rather than simply an extension
of orthodox methods developed for isotropic materials. In this and
the following chapters an attempt will be made to develop such a
formulation, together with special algorithms for solving the problem
thw; formulated. The essential change will be that the optimisation
problem is regarded as a search in the space of the deflections of the
structure, rather than one in the 'design' variables directly. In
other words, an optimal deflection pattern will be sought, and the
optimal values of the design variables will be inferred from this.
For this reason the approach will be referred to as the 'Deflection-
Space' formulation.
-28-
The deflection-space formulation, which is not in fact limited
to FIP structures, will be introduced in its simplest form as follows.
Consider the structural optimisation problem:
min V(t) t
s.t. gi( o(t)) L 0, i=1,2 M 2.1
t 'a 0
J=1,2 Ne
Visalinearscalarfunctionoft,adesignvectorin01.is a gi
constraint function. 6 is a deflection vector in Od, and is also a
linear function of t . The structure to he designed is thus linear,
that is, it is constructed of linearly elastic material and in loaded
lightly enough for its geometry to remain significantly constant under
load P for all relevant values of t. For the moment, only one load
net is implied, while a consideration of stress constraints will be
postponed until later. We shall prove a basic Lemma:
UMMA 2.1 A necessary condition that a denirn vector t* shall be a
solution to problem 2.1 is that it is a solution to the following
problem:
min V(t) t
s.t. B(a) t = P P1
t.1 > 0. i=1,2, N
Where B OD is an NdxNematrix whose i'th column is the set of nodal
loads in the i'th element of the structure per unit value of ti, if
the structure is deformed in a way given by the deflection vector
under the load P.
-29-
Proof Let (5* be the deflection of an optimal structure satisfying
2.1. Then in general there will be a set of va]ues of t for which this
deflection will be obtained under the load P. Since gi in 2.1 is a
function of the deflections only, all such design vectors will
correspond to feasible structures. Clearly the optimal value t* will
correspond to the minimum value of V(t) for this range of t. Formally,
L* must solve the following problem:
min V(t) t
s.t. K(t) = P 2.2
t > 0 .
where K is the NdxNd
stiffness matrix of the structure, and depends
only on t. Since the material of the structure is linearly elastic,
the stiffness matrix is related to the design variab]es in the following
way:
Ne K = E t i k 2.3
i=1
where k. is a stiffness matrix per unit thickness which depends only —1
on the geometry of the i'th element. For simplicity, we take ki to be
expressed in terms of the global reference system of the structure,
i.e. to be an NdxNd
(sparse) matrix. Using 2.3, the equality constraints
in 2.2 can be written:
K(t) 6 *
Ne = E ti (ki b *) 13 t p 2.4
i=1
If (5* is known, therefore, Lemma 2.1 is proved as a necessary and
sufficient condition. Viewed as a condition on t, however, it
enables us to say nothing about 5 , and so it is proved as a necessary
condition only.
-30-
For any deflection vector 6, Lemma 2.1 enables us to formulate
the problem of inferring .the necessary values of the design variables t.
It therefore associates a value or set of values of t with every deflection
vector 6 for which a solution to P1 exists, and therefore also associates
with 6 a value of V(t). We can regard these as the values of a function
W(o), and we can then derive a sufficient condition that t shall
satisfy problem 2.1 in terms of this function as follows.
LEMMA 2.2 A necessary and sufficient condition that a design t*
shall be a solution to problem 2.1 is that the deflection vector 6 *
associated with it shall solve the following problem:
min W(45)
P2 s.t. gi(b) 4: 0 i=1,2, M
wherr! W(6) is the optimal value of V(t) in Lemma 2.1 for any
deflection 6.
Proof The Lemma follows from the definition of W(d). Since the
value of this function is the minimum volume of any structure having
deflection 6 under the load P, a minimum of the function within the
feasible region defined by gi( 6) must satisfy problem 2.1.
These Lemmas will prove useful from two points of view. Viewed
as optimality conditions they provide some insight into the nature of
optimal structures in general and FRP structures in particular. But
their main importance in this work is that they provide a means of
decomposing problem 2.1 in such a way that the integer programming
problem becomes trivial, while the subproblems involved can be
simpler in some instances than the corresponding problem in the space
of the design variables. The deflection-space formulation, then, is
simply this: find an algorithm for solving P1 for a general deflection
6; then, using this as a function evaluation routine to compute WM,
-31-
solve P2.
The way in which this overcomes or ernes the difficulties inherent
in more orthodox approaches remains to be described. The development
falls naturally into two parts. First, an algorithm for solving P1
will be proposed in the special case of FRP structures. Then, in
chapter 4, some approaches to the solution of P2 will be discussed and
numerical results given for some maximum-stiffness problems. However,
it must be emphasised that this formulation of the structural optimisation
problem is applicable to a wider class of structures than those
constructed from FRP materials, and before proceeding to discuss the
solution of P1, some general implications of its form as an optimality
condition will be examined.
2.2 Implications of the Deflection-Space Formulation
First, problems P1 and P2 will be extended by considering a general
number of alternative load cases. Problem P.1 then takes the form:
min V(t) t
s.t. g. j 6.(t)) < 0 - 0
i=1,2, M
j=1,2,
2 .5
To derive the form of P1 appropriate to this case, recall problem 2.2,
to which the obvious extension is:
= -pz
PQ
2.6
t> 0 _ -
-32—
Here we have NdxQ constraint equations, but not all are independent
since, by the Virtual Work Theorem, for any design t we have
P.t .(t) . P.
1
t o .(t), —1 — — — — — i,j=1,2, 2.7
—1) Clearly, this provides an additional q(Q conditions which are
2
automatically satisfied for any design vector t, and so this number
of constraint equations can be eliminated from 2.6. If this is done
by eliminating one equation from the set corresponding to the load P2,
two from the set for P3 etc, it becomes clear that if Q > Nd, then only
Nd load cases need be considered; and for Q < Nd, the problem P1 becomes
min V(t) t
1-31 El
B r ' P -2
t - -2
P1
t = P —Q —Q t > 0
Here, P.' is not simply the i'th load vector, but the P.H.S. vector
corresponding to the i'th set of equality constr i(i-1 )alats when ,
^quations have been eliminated from it; Pi in; the corresponding
B - matrix. In extending P2, note that equations 2.7 could be regarded
on a statement that if 61
chosen arbitrarily then only (Nd-1) ire
components of 62 can be no chosen, and no on until only oru component
of the Nd'th deflection vector could be chosen arbitrarily, if Q = Nd
.
We denote such reduced deflection vectors, analogously with the
vectors P'. in P1, as: j1'
6 - 2' ... ' 6 Q. Problem P2 then becomes:
IS•t •
—33—
Min
b 1 , b 2 2 b •••,-,
w(...61 ). 1 Q
s.t . gi(b J ) 0
t > 0
i=1,2 M
j-1,2 P2.
In what follows, the above formulations of P1 and P2 will be
understood, although Q will often be explicitly taken as unity.
Clearly, lemmas 2.1 and 2.2 still apply to the extended forms of
P1 and P2. Consider P1. It is a problem with a linear objective
function, Q Nd -
Q(Q-1) linear equality constraints and Neunknowns.
2
If S 52' '
5Q are known, and if Ne> Q Nd - If , then P1 is
-
a linear programming problem in the standard form. The following
theorem can be stated without further analysis.
Theorem 2.1
Let a structure consist of a number of nodes assumed fixed except
fo,' small deflections under load, connected by a number of elements.
Let both the stiffness and volume of the i'th element be Linear functions
ofa"designvari.ablet.,and let the structure be composed of linearly
elastic material. Let Nd
be the number of degrees of freedom of the
supported structure, and let an optimal structure be one which has
minimum volume and whose deflections satisfy arbitrary constraints
under Q linearly independent alternative load sots. Then the maximum
number of elements necessary in the optimal structure is Q Nd
Q(Q-1) 2 •
Proof
This theorem follows immediately from Lemma 1 by way of the linear
-1) programming nature of P1. Since it has Q Nd Q(Q equality 2
constraints, this is the maximum number of non-zero values of ti in
-34-
any basic solution, and in the optimal solution in particular; see for
example Dantzig, ref. 1.3. It is necessary to add a c:iutiolary note,
because of the possible existence of 'degenerate' solutions to the L.P.
The phenomenon of degeneracy will be discussed it more detail in a
later section. For the moment, it is only necessary to state that it
is possible for a number of equal-optimal solutions to an L.P. to
exist. All such solutions when found by the Simplex algorithm will be
basic solutions and will satisfy the above theorem; but every convex
combination of such solutions will also he optimal but will have more
than the maximum number of elements allowed by Theorem 2.1. Bence,
optimal structures can exist which have more elements than required
by Theorem 2.1, but in every case there will exist -impler structures
of the same volume and having the same deflections under the given loads.
There exists a useful corrolary to Theorem 2.1.
Corollary 1
Let a substructure of any structure be defined ns a subset of the
nodes of a complete structure, together with connecting elements. Let
N ' be the number of degrees of freedom of such a substructure. Then,
if the overall structure is optimal, the maximum number of elements
in '.he substructure is Q Nd' - Q(Q-1)/2 if Q < N
d '' otherwise
Nd '
Proof
Let S' denote th? substructure. .5' can he isolated from the
optimal structure provided its contributions to the nodal loads in
the overall structure are held constant. This implies that S' could
be replaced by any other substructure having the same nodal loads and
deflections; and if such an alternative structure could he found which
was also of less volume, then the overall volume of the structure could
be reduced without violating its constraints. But this would violate
-35-
the initial hypothesis of optimality; iL follows that 8' is optimal
in the sense of P1, i.e. is of minimum volume for riven loads and
deflections. Hence theorem 2.1 applies to it. However, S' can only
be influenced by some subset of the load vectors, spanning a subspace
of dimension Nd
1 . The corollary is therefore proved.
The application of the above theoremtn Mt' structures will 13e
undertaken in a later section; but it is interesting to consider its
implications to other forms of structure. Note that the constraints
for which the theorem holds are very general: it is only necessary
that they be functions of deflections alone, and even this can be
relaxed in the FRP case, as will be shown. Tn the case of a pin-
jointed truss or a ball-jointed frame, this w:)nld include alt direct
constraints on stress and deflection, since stresses in these cases
aro dependent only on deflections. The statical doterminacy of
optimal pin and ball jointed structures ran thus hc provod in a very
r;imple and general way. For, ronsiderinr one lo:.d ,.ase only (Q=1) 1
the maximum number of bars necessary in such an optimal :;! ructure,
by theorem 2.1, is equal to Nd, the available number of equilibrium
equations. Of course, this does not oF itself' prove static determinacy,
since the structure cou]d he a mechanism in some parts (stiff under
the fjven loads) and redundant in others. But the corollary asserts
that no such redundant substructures can exit: hence the optimal bar
structure under any net of direct constraints on deflections is
statically determinate.(};ef. 2.1)
This is a very simple proof, yet
establishes the extremely wide range of constraints for which this
well-known property of bar structures holds.
If we turn to the problem of optimising isotropic sheets, again
under any deflection constraints, it becomes clear that the choice
-36-
of finite element mesh may have a critical effect on the optimal
structure. For, again taking the case Q=1, it is clear that if the
number of finite elements exceeds the number of degrees of freedom,
then void elements,that is, elements of zero thickness, are inevitable
in the optimal structure. Steps would therefore have to be taken to
prevent this in those cases where such a situation would be undesirable.
If this is done by setting a lower limit of toi
on variable ti, the
above theorems and Lemmas continue to hold for the variables (t.-t .). 1 01
This concludes the brief discussion of the general implications
of this unusual way of looking at the structural optimisation. It
has served to chow that, simply by formulating the problem in deflection
space terms, it is possible to gain some insight into the general
nature of a wide class of optimal structures. Note that, although
the analysis so far has been based on the assumption that the constraints
in problem 2.1 are functions of deflection only, the two widely
differing examples used to illustrate theorem ,").1 have shown that such
constraints may he quite general,
may for example include stress constraints. It will be shown that this
in also true, perhaps more surprisingly, for FRP structures.
The deflection-space formulation applied to fibre-reinforced
Structures
In introducirg the deflection-space formnlatiot, it has been shown
that we can replace problem 2.1, which is usually viewed as a problem
in t-space with a linear objective function and, usually, non-convex
constraints, by two sub-problems. The first, which nust be solved
repeatedly, is of linear programming form, while the second has simpler
constraints than 2.1, but a more complex objective furction. While
it has been shown that this formulation provides some useful insights,
-37-
it remains to justify the approach as a means of arriving at optimal
structures. The only obvious advantage so far is tnat neither
subproblem has such cumpiicated constraints as the original problem.
In this section it will be shown that the formulation allows the
integer programming aspect of the FRP problem to be contain?d within
the P1 subproblem, and indeed allows it to be dealt with very easily.
However, in order to introduce the problem, it will be assumed that
a fixed number of layers, each with a known fibre angle, have been
previously assigned to each finite element. For example, the continuous
range of allowable fibre angles might, as an initial simplification, be
replaced by a discrete set evenly distributed in this range. In
addition, only one load case will be considered. Problem P1 can then
be stated as follows:
NL. L Ee t • Min
t1, t2 ,.., t
N e -
2.0)
s.t. E I3 i t = P 1.1
ti .> 0, i=1,2 Ne
Ne is the number of finite elements in the structure.
The vector ti is the vector of thicknesses of the layers in the
i'thfiniteelemerit,andisofdimensionL.,wheroL.is the number
cf layers assigned to that element. Matrix (3', which is of size 4.0
Nd x L.1, is the matrix whose i'th column is the vector of loads per
unit thickness of the j'th layer in the i'th finite element, caused
by some known deflection S . The fibre angles do not appear explicitly
because they have been given values which are absorbed in the B-matrices.
-38-
The actual effect of the fibre angles in given by equation 2.3.
The matrix k1 can be derivd starting with the equation for the
stiffness matrix of a typical layer given by 1.6 (dropping suffices):
k.= t{kio 1 2 3 4 + kiCos 40 + ki Sin 40 + ki Cos 20 4 ki Sin 20} 2.9 -1 - - - - -
Let 0j be the fibre angle assigned to the j'th layer in the i'th
finite element. Then the j'th column of 81 is given by:
ki6 . ki b Cos 4u 4 ki 6 Sin 401 +
k1 6 Cos 201 + ki, Sin 20i
-o-- -1- j -2-- j 2.10
(Note that the kr matrices depend on i only, and not on j because they
are functions of the element geometry alone). Introducing the notation:
P , . = k , we can write the j'th column of 8 in the following form: r r
i + i Cos 40i + 01- Sin 4 0 +0 Cos 2 Oi i Sin 2 0 -o -1
2.11
The vectors P can be computed once for all for a given finite element -r
mesh and deflection vector, and the columnsnf Bi aro then rapidly
calculated by substituting the given values of 0i into 2.11.
Theorem 2.1 can be applied to problem 2.Wito yield the following
results.
(i) The maximum total number of layers necessary in the optimal
structure is equal to Nd
for the Cane Q=1
(ii) The maximum number of layers necessary in any element of the
optimal structure is equal to the number of deformation
modes of that element for Q=1.
Statement (i) follows from the fact that every layer is an element in
the sense of Theorem 2.1; while (ii) follows from the corollary to
that theorem, taking a finite element as a substructure.
-39-
Problem 2.8609 is a standard linear programming problem when the
0, are known, subject only to the proviso that, the Li must be chosen N
sucht.hatEe l,.>.Nd. That is, there must be more variables than
i=1
constraint equations. This condition is easily satisfied in every case.
Of course, there is no guarantee that a solution will exist for any
given deflection ; but this is a point which will be explored in
chapter 4. The methods available for solving a standard Linear
Programming Problem such as 2.4Nare all based on the simplex algorithm
of Dantzig (ref. 1.3). Although this method is extremely well known,
rt brief description of it is included here in order to introduce the
notation, and some of the ideas, which will be used in the next
section to develop a new algorithm to solv? the nonlinear mixed
integar form of. Pl.
The Simplex Algorithm
Consider the general problem:
Min W ctx
x
9.t. B x d
x. 0
i = 1,2, ..., n
where B is an mxn matrix of real numbers, m < n, and d. > 0, 1
i ,1,2, m. An important concept in Linear Programming is that
of 'basic' and'non-basic' variables. Consider an arbitrary division
of the variables into two groups, represented by a vector x1, of
length m, and a vector x2 of length (n-m). The matrix B can always
be correspondingly partitioned into submatrices B1 and B2, where B
1
-4o-
is square; and c into c1 and c
2. The objective function can thus
be written:
lt 1 2t 2 W = c x c x — — — —
and the equality constraints are:
B1x1 + B
2x2
= d
If B1 is non-singular, then:
1-1
x1 = B (d - B
2 x2)
Using 2.13(iii) in 2.13(i) we obtain
2.13(i)
1t
1-1 2 2 W =W1 + (c2 -c B B) x — — — — —
- it
1-1
where W1 = c B d . — — —
2.13(iv)
Clearly, if the values in x2 are chosen arbitrarily, the vectors x1
and x2 will satisfy the constraints 7(ii) so long as x
1 satisfies
2.13(iii).
We will now consider the optimality conditions on x1 and x
2,
hearing in mind that at the solution all the variables mu.-,t have non-
negative values, by 2.12 (iii). First of 911, we introduce the
notation:
lt B
1 c ,
= 2 - c B B-)
the (n-m) vector c' is termed the 'reduced gradient: vector'; it gives
Lhe steepest ascent direction for the function W, if the variables
are always constrained to satisfy 2.13(ii).
Let us now examine the i'th element of x2 at th- solution, together
with the corresponding element of cl'4. Three cases are to be considered.
(i) > 0. Then from 2.13(iv), any decrease in x.2
will further a
reduce W; so, if is optimal, xi must be zero (since no further
decrease in its value is then possible).
I I-
(ii) 1 c14 ' . < 0. Then the solution cannot he optimal, since W
2 can be decreased by increasing x., and this win not violate the
positivityconstraint.If,inincreasingx.2 , we cause one of the
x1
elements to decrease to zero, that element can be exchanged for
x2. The new value of cW . must then be examined.
(iii) c' i = 0. Then, x.2 can be reduced to zero without violating
-W,
2.12(iii). If, in the course of reducing x2
any element of x becomes
zero, then this element of x1
can be interchanged with x.2 as in case (ii).
This reasoning, though not purporting to be an exhaustive proof,
should serve to demonstrate that, at the solution, x2 will be zero;
in other words, a non-basic set of variables, (n-n) in number, can be
found, all of which are zero; and the corresponding reduced gradient
vector c' will have all elements positive or zero. A vector x which
satisfies 2.12(ii) and 2.12(iii) is called a feasible point; if in
addition at least (n-m) of its variables are zero, it in a basic
feasible point. The argument above should show that the solution to
problem 2.12 is a basic feasible point.
:letti.ng x2= 0 in 2.13(iii) yields: -1
x1= B
1 d 2.13(v)
Vit; follows that basic points are generated by choosing m columns from
. B and solving for x1; 3f all the elements of x
1 turn out to he non-
negative, such points are also basic feasible.
The simplex algorithm, devised by Danzig in 1947, se-Ls out to
solve Linear Programming problems by systematically generating basic
feasible solutions of reducing function value. Any such algorithm
must converge, simply because only a finite number of basic feasible
solutions can exist for a given problem, and the requirement that the
.7
-42-
function value must decrease on each iteration means that no such
point can occur more than once. (The case where no r,duction in W
can be made on some particular iteration is called the 'degenerate'
case, and will be touched on later.)
The algorithm begins from a known feasible solution. On each
iteration, the elements of c' are examined. If all are non-negative,
then a solution has been reached. If riot, the non-basic variable
corresponding to the most negative value of 4 is allowed to increase.
If this results in all the elements of x1, as calculated from 2.13(iii),
increasing then the problem is clearly unbounded; no solution to the
problem exists. Usually, however, at least one element of x1 will tend
to decrease as the non-basic variable is increased. The first such
variable actually to become zero is chosen to leave the basic set, and
replace the non-basic variable which is now positive. The result is a
new basic feasible point which has a lower function value. The case
when one of the x1
variables is zero to begin with and decreases
with increasing value of )( is the degenerate case; the iteraA.on
qien results simply in a change in the basic set which usually leads
to a non-degenerate -•Else on subsequent iterations. The Simplex
algorithm is so arranged that the inverse of B1 is continually updated
no that repeated inversion need riot be done; this is of course made
possible by the fact that only one column of B1 is changed on each
itf.rntion.
The actual operations of the algorithm are usually represented
in tableau form. The initial tableau can be generated by arranging
the equation 2.12 in the following form:
J 1 1 1 ! 2 x1
x2 . . . .xm tx 1
1
1 0
0 1
• •1 -c
W 1
xp
n-m
1-1
B B2
' -cW
-0
•
(n-m)
- 0
+1
0
B1 1
d
t- 1 B d 0
-43-
B1
B2 ' 0
x2
W
1t
't 2 k -C-C -11 _ i _ t
0
(Where the objective function has been written -cltx1-c2'x2 +W = 0).
This set of equations is then transformed
1-1 2
I , B B2
1 t -1
0 ' ( -c2t+c
1 B1
B2) ' +1
xl I I Bi -1
d
x 1t 1-1
c B — -1 W
r-
This enables us to write down the initial simplex tableau:
Table 2.1
The variables have been arranged such that the first m constitute x1.
Clearly the last column gives the values of x1
and W. The next step
1-1 is to chose the column from B B
2 corresponding to the most negative
value of '
cW'. this decides which non-basic variable will now enter the
basis. The problem is then to decide which variable should be
replaced in the basic set, i.e. which row of the new basic column should
(B1
d). i.e.isuchthatr.= - -)i
i
-1 = Min Z 0.
-44-
he the pivot element. This is decided by a consideration of ?.13 (iii)
which gives the change in the x1 vector for changes in x as:
, 1-1
2, x1 + 0x1 = B 1
d - (B1 B ).4x2. 1
when the first R.H.S. term is the right-most column of the tableau;
and the second term is the new basic column. Since one of the elements
of x1 is to become zero, and the others are to be non-negative, we
choose i such that:
-1
0 = Min ((B1 d). J
- (B-1B2)1 ), i 1
i=1,2, m
(B1 ") •
(B B)lj 0.
- J J
f 1-1 i The tableau is then pivoted on 03 B -)
PN
The i'th element of x1
then drops out of the basis to he replaced
by x2. and the algorithm proceeds as already descihed. 3
The Following special cases are important -
(i) No initial basic feasible solution known. This is in fact the
usual case in our application. The problem is then solved in two
phases. In the first phase we introduce m new variables:
t Yll Y2' , ••. Ym =
m
Associated with them is an objective function jg = Yi. i=1
The secondary problem is then posed:
m
Minim .g= /2 Yl 1=1
s.t. B x + z = d.
ctx - W = 0.
x. 0, i=1,2, n
y. 0, j=1,2, m.
This is another Linear Program, for which the basic feasible solution
z = d is known. If a solution to the primary problem exists, then A
can he driven to zero; the resulting value of x is clearly a basic
feasible solution for the primary problem. The 'special variables'
2. are then dropped and phase 2, the solution of the primary problem,
cnn proceed. Conversely, if A cannot he reduced to zero, then no
solution to the primary problem exists.
= 0 for one or more values of i on some iteration.
1-1 • If (B B)1 < 0, then no difficulty results; if not we have the
degenerate case already mentioned. In such a case, although the basis
can he changed, no change in the values of the basic variables can be
made without causing one or more of the basic variables to become
negative. Thus the objective function cannot be reduced on that
iteration. The basic convergence proof already stated thus breaks down,
and 'cycling', i.e. generation of a cyclic sequence of solutions is
possible. However, although methods exist to restore theoretical
convergence, these are regarded by most optimisers as unnecessary,
-46-
and in fact no case of cycling has ever been reported in practice
(ref. 1.3). In consequence, the theoretical problem will not be further
considered in this paper, although mention will be made of it in
discussing numerical results.
The Revised Simplex Algorithm
The Simplex algorithm can be greatly improved, particularly in
the case where the B matrix is sparse, if this matrix is not transformed
on every iteration. It will be noticed that on each iteration, only
two parts of the transformed tableau are used. These are:
(i) the last row if the tableau, i.e. the reduced cost c'.
(ii) the column of the transformed B2 corresponding to the most negative
reduced cost.
It is only necessary, therefore, to update B1 -1
on every iteration,
and to use this to compute these quantities. This reduces the amount
of work done on every iteration as compared with the Simplex method
and allows the matrix B to be stored in a compact form, since it is
never actually changed. The updating of B1 -1
is easily accomplished
by noting that the pivoting operation is equivalent to a premultiplication
by the matrix:
1 0 c1 • 1,1 .."
0 1 q 2 i '''' ,
0 ... 1 qm+1,i ]
(B1 2
where, if the_Pth column of (B B2) is denoted by a, the elements
o ---
0 11108 1 qm+1,I, .
i =I
-47-
of a are defined as: qr .
i - a
r/a . . r i
1/a. r
The steps in the revised simplex algorithm are therefore as follows:
Step 1 Form a row vector 71- = etH
Where H is the current inverse basis matrix, B1
and e is the (m+Wth unit vector.
Form c'= c 2 --2
Step 2
Find c'J = Min {c'i}. .
If c'J 0, stop.
Step 3 Form a = H B , where BJ is the J'th column of B - - -J ..._
g= H d
rI = Min {O./a. a.> 0 }.
.
Step 4 Form E = 1 0
0 1
0 0
{
where qiii = - ai/cx, ,
1/aI ,
Update H by forming 111- , E H, net H-e, return to ntep 1.
This is a very basic description of the Revised Simplex algorithm,
which has been greatly improved in recent years. However, most of
the improvements have been concentrated in the area of improving the
updating procedure for H, so as to minimise storage and improve
stability. The logic remains very much as described above. The
-48-
description thus provides a starting-point from which we can proceed
to describe the real problem with which this section is concerned:
namely, the exact solution of the nonlinear mixed integer problem which
P1 becomes when we do not pre-assign values to O. and L.. 1
The full fixed deflection F.R.P. problem is as follows:
Ne
L.
Al1
Min . t
t1 Ne 1
Ne L i=1 j=1
s.t.
Bi ( 0i,L.) ti = P —
i=1
2.8(b)
0 IT Oi. S 7
L. > 0E R L
L. , integer
where 0 is the vector [01, OLd
Comparing this with 2.8(a), the main differences are teat the
constraint-matrix ) instead of being known, is a function of 0 ,
the unknown fibre angles; and that the number of variables is unknown.
Wo thus have the interesting situation that the number of variables
in the problem is itself a variable of the problem. Each column of
i is of the form 2.11, but with 0
i as a variable; B
i is therefore
nonlinear in 01 .
Problem 2.8(b) is evidently much more complex than 2.8(a); it
would seem that the Linear Programming nature of the problem has
vanished with the introduction of the non-linear variables gj, and
the integers :L.. However, the new problem can be regarded as the
-49-
limiting form of the old, when L:—* 00. That is, 2.8(b) can be seen
as a linear program with an infinite number of variables, one for
every value of 0i in the given range. This is the fact which will
be used to develop algorithms for the solution of 2.8(b).
The basic approach is to consider the effect of pre-assigning
values to L and 0i, as in 2.8(a). A systematic form of this would
be to divide the allowable interval of B l, say 0 < 0l it , into
(L.-1) equal intervals and use the end points of such intervals as
the values of 0i for that element. The more intervals chosen, and
thereforethegreaterthevalueofL"the more closely does the
final design approximate to the 'true' optimal design (for the
given re infinite
in the given range. It must be emphasised, however, that no matter
how many layers are assigned to an element to begin with the maximum
number that will remain when the optimal design is found will be
fixed by Theorem 2.1. nie effect of increasing L., therefore, is to
improve the precision with which the solution to 2.8 is found, at the
cost of increasing the number of variables in the linear programming
problem. In the limit, the exact solution would require an infinite
number of variables, corresponding to an infinitely fine division of
each interval on the Oi. The implementation of such an approach
is clearly impracticable, and yet without it it appears impossible
to achieve one of the aims of the new formulation, namely, solving
the integer programming problem involved in determining the optimal
F.R.P. structure. However, it will be shown to be possible to
generalise the Simplex algorithm in such a way as to enable problem
P1 to be solved without the approximation implied by formulation 2.8(.40.
In order to introduce this generalised method, which will be referred
•
-50-
to as Functional Linear Programming, it is convenient to call upon
a very simple structural optimisation problem which is directly
analogous to the F.R.P. problem, and which provides a ample vehicle
for the ideas involved.
The Problem of the Single-Node Truss
Consider the problem depicted in figure 2.1 A structure is
required which will transmit loads P , P from a point A to a number x y
if earth points e1 eN distributed along the straight line E- E.
N a. E
FrgURE 2.1
The elements connecting A to e. are straight pin-jointed bars, and A
must deflect by amounts given by [a x, 6y]. A is unit distance above
E-E, the deflections being insignificant in comparison with this
dimelmion. The length of the i'th element is 1/Sin 0 i, where 0 .
is the angle between the bar and E-E, measured anti- clockwise; and
the contribution to the loads at A made by this element under the
given deflection is easily shown to.be:
-51-
Cos20Sin 0 + Cos 0 Sin2 0 .6 y i x
01 = 1
Cos B .Sint 0 .6 + Sin3 0 Y i x
The fixed-deflection problem for this structure is clearly the
following ordinary linear program:
N
Min 14E: ti/Sin 0 i 1=1
s.t. B t = P
t Z 0
[
where B = p -I
The 2x1 column vectors Pi are of course formed by substituting the
known values 01, 02 ...,0 N into expression 2.15.
Theorem 2.1 immediately gives the maximum number of bars of non-
zero cross section in the optimal structure as two; so long as N z 2,
problem 2.16 is a linear programming problem which, for given
values of 6, can be solved to yield the optimal values of t, the
thicknesses of the bars.
Problem 2.16 can be regarded as an approximation to the continuous
problem obtained when 0. is allowed to take on any value in the
range[OOT] . To see how this problem migh' be solved, note
that, in 2.16, the matrix B could be compactly represented as:
0(0) 4 . That is, the matrix is represented by a single = v1 • • • • °N
vector function, together with a set of values of 0 which, when
substituted into generate the column of E. The vector function
is of course given by:
'Cos20 Sin 0.6 x + Cos 0 Sin20.6 0(0) =
Cos 0 Sint 0.6 x + Sin30.6 y
2.15
2.17
-52-
By using expression 2.17, we can represent the matrix B very
compactly - although in practical comput:itional terms the
compactness of the representation depends on how many constants
must be stored to represent the functions pi(0) which make up
the vector function . Considering for the moment only the
notation, it is necessary to devise a way of representing the
product of h(0) with a vector such as t. This c.11 he done as
follows. Let X(0) relate to t in the same way as the 01 •••
B id
vector function P(0) relates to B, that is, let it represent
the vector: [t t ]. The quantity B t is then representable 1 td
as[P(0), X(0)] A = h , and just as P(0) condenses B to a 1
• • • 09 Td
vector function,X(0) can be thought of as representing t by a
scalar function. If, in the same spirit, the vector
[ 1 1 , is represented as 6(0)
0=a we
J sin°1
sin t9 _1 , ..., ON
can write 2.16 as:
Min W = p(0), x(0)]
x(9) 0
s.t. [(0), X(0)] = p
2.18
X(0) Z 0
(where 0 represents the set el, ..., ord.
a) far, of course, the main improvement of 2.1W over 2.16 is in
compactness of representation; it has taken advantage of the
known functional relationship between the columns of B in 2.16
by introducing 0(9) into the formulation. In doing so, however,
it has added information to the problem statement by explicitly
representing the functional relationship. The problem, however,
equivalent to:
S.t.
/0
yi 0
X(0) z 0
-53-
ntnys the same; the real point is that, as will now be shown,
the simplex algorithm can be applied directly to the compact
representation 2.18.
Consider first the phase 1 problem of finding a basic feasible
solution to problem 2.18. If y1, Y2
are special variables (see
equation 2.14) we can write this problem as:
min
Y, X(9) u"3
s.t. p(0), X(/9)]0 + I P
6(0), X(0)4 w = cl
y. 2 0 , i=1,2
x(0) 0
and, by writing xi, u ta = ut (P - [P(0), X(0).1 ), this is O
L0tP1
The values of X(0) not currently in the basis will he marked X *(0).
This leads to the following initial tableau (table 2.2).
-54-
X'(9) 5'1 Y, VI Azd
Cos20 Sin g 1 0 0 0 1
Sin . 2 9 Cos 0 0 1 0 0 0
-c IW , - 1/Sin 0 0 0 1 0 0
-12 Cos ? "OSin0+Sin20 Cos° 0 0 0 1 1
( 0= 01, ON)
Table 2.2.
To show how the ordinary Simplex algorithm can he applied to this
tableau, the step of the first iteration will he briefly described.
Steps 1 and 2
Find the minimum reduced gradient, that is, examine the last
row of the tableau to find the maximum entry. In this case, during
the first iteration the last row is represented by:
(Cos20 Sin0+Sin20 Cos° ),= n . Hence, one must evaluate 1' . N
thisfunctionforeachofthegivenvaluesofmd choose the
one, say 0j, which gives the maximum value.
Step 3
Form a = P (6p, and A = P
rI = min {a/6. la. > 0} .
Thus, this step is almost exactly the same as for the normal
representation, the only difference being that instead of selecting
the column a from among an explicitly-enumerated set of vectors,
one substitutes the value 0 into the vector function 0(0).
-55-
step 4.
Pivot the tableau on ?,(6y. This is simply a matter of forming
E in-the usual way from the elements of a, and premultiplying the
tableau. This reduces 0(0J ) to a unit vector, and in doing so,
alters the functions representing the columns of the tableau which
are non-basic. The function representing c' (0) is also changed,
and the algorithm can now return to step 1 for the next cycle; one
of the unit vectors is now labelled (0J' tJ Yi ) rather than .
The most obvious advantage of the procedure above is that the
storage requirement is dramatically reduced as compared with an
explicit representation. One must only store P(0), 0(0j), I! and P,
torotherwiththegivensetofvaluesofe9..This reduction in
storage becomes more marked as N increases, that is, as the number
ofallowriblevaluesofe.become greater; for in this case, only the a
vector 0 = 01, ..., O ri needs to be extended. In fact, if 0 is
allowed to take any value, the explicit representation becomes
impossible, while the compact representation is actually reduced in
size, for the vector 0 need no longer be stored. This is the real
value of the compact form, and is the feature which will he exploited
to allow the problem to he solved when no restrictions are placed
on allowable values of 9. except that they must lie in the range 0 tor . The notation used in 2.1P will still apply, with
redefined simply as:
oa le
0 <7 0 1T
note, however, that the quantity [b(0), X(0)] in this case O
represents a finite vector as before, but one which is formed by
the multiplication of a matrix of size (2 x 00) by a vector of
-56..
infinite length, This is the case because x(0) now represents
a vector: [to , to , ...] where there is an element for every 1
point on the interval LOOT] . However, it has already been
pointed out that no matter how many bars are allowed, the largest
number that can occur in any basic feasible snliitinn is, in this
case,two.Hence,atsuchasolution,t0 ,nforevery(9.in the
range 0 except two. Such a situation could he represented by figure 2.2.;
the vertical lines represent the values of t1 and t, at the optimal
bar angles 01 and 0,.
Figure 2.2..
Hence, at the solution, [13(0), X(0)]0
will, in fret, be equal to:
t 0 ( 0 + t0 ( . 1 1 2
However, 01 and 6)2 are not known a priori. The unknown quantity
of the problem can thus he regarded as a distribution, x(0), over
-57-
the set 0 where a distribution, in this nt'rw;v, is defined as a
A Pr4uRE 3. 11- : CoNVERGE4C£ org .5 fiGer u., fro 14 o t_s
le
411\L."L.."-iL-s.--a-----e—"---°-----.•
to
50 too 150 200 250 300 350 +03
i-re RAT% DNS
-149—
CANITr LEVER SHEET UJ TN 1-10 1...E.
N U rem3.6-0.. CC Rugs I C 2 1
N 4 34 43
'HASE I
ITE A41104.5
AVGAAS E 44.9 = 1. 32. Wilt, *1-• 4 = 1.80 N A
1R tiNq E 4 o —.• 4 1 5 1 I 1.3 --1.
'PHASE ir
iThRAToNs
nvEAAcE 2.15.S = 6•36- Net 3 66.1 = 8.51 N A
`R AN; f. I4o —* 2.-7-.3 2.'34 --,.. 563
T ABLE 3. 12.
A matter of particular interest is the number of iterations
required by phase I of the algorithm. The minimum possible
number of such iterations is of course Nd; • the usual number in
classical Linear Programming* is about 2Nd. It is gratifying
to find that the (essentially infinite) F.L.P. algorithm
requires about the same number. This phase almost invariably
ends with a small negative value for A . This is apparently due
to round-off errors, and seems to cause no difficulty during
subsequent operations.
3.5 Factors affecting the convergence of the F.L.P. algorithm
The program used to produce the results so far described
was an implementation of the F.L.P. algorithm given in chapter 2.
That algorithm was based closely on the structure of the Revised
Simplex algorithm Which is not the most efficient possible
algorithm for solving such L.P. problems, although its simplicity
-150-
recommends its use. In particular, the choice of pivotal column
is an element of its strategy which is a compromise between
simplicity and theoretical efficiency. Recall that the procedure
for changing the basis involves two steps:
(i) choose a non-basic variable to enter the basis. This
involves finding the minimum reduced cost, say dj, and selecting
the variable associated with the corresponding column of the
tableau.
(ii) Locate the currently-basic variable to be dropped by
finding the minimum value, r, of the ratio filq/di.1°C.i. > (33
where : A a 8 1 p
o )
Because of the essential linearity of the constraints as
functions of the X.1, the reduction in the value of the function
is then:
A W_ dJ rl 3.1
In the F.L.P. case, therefore, the reduction can be written as
A 1J
(B'P)I • ■••• • • ■1...
(5'07014 The nature of the compromise can now be clearly seen, because
the aim of the iteration is to maximise this reduction. To do
this exactly requires the solution of the problem:
. (0)
• .1 i, J, OJ
S. t. (0,1) < 0
0-"b (e j))c
> 0
CE1'.0t /C =
3.2.
. 3
-151-
This is clearly a complicated sub-problem, involving as it does
an interaction between i, j and 0 . The algorithm based on
Revised Simplex has approximated the solution by first finding
j and 0 so that c' i( is minimal and less than zero. This
satisfies the first constraint. Then, i is chosen so as to
satisfy the second 2 rad third constraints. It is then hoped
that the objective function of 3.3 will take on a value
reasonably close to its minimum. It is not difficult to
imagine circumstances in which this will be far from the case.
From the computational viewpoint, by far the greatest
advantage gained by using the simple strategy is that only one
column vector (0i) need be examined, because j and e . min
have been decided from an examination of the reduced cost row
only. In the context of ordinary L.P. where the variable 0 J
does not appear, this advantage is so overwhelming that the
exact solution of 3.3 is never done in practice. However, even
in the case of ordinary L.P. improved simplifications have been
developed, for example by Harris (ref. 3.1: 'Pivot Selection
Methods of the Devex L.P. Code' Math. Programming 5 (1973)1).
The reason for the reluctance to use any method which will force
the computing of more than one potential pivot column, in the
case of ordinary L.P., is that, if a significant number of
- columns 0 1 a,) must be computed, much of the point of the
Revised Simplex procedure is lost; one might almost an well
transform the whole tableau on each iteration, which is a
reversion to the basic Simplex algorithm.
-152-
In the case of the F.L.P. algorithm, however, this objection
is modified, because when the vector function B 10(01) is formed,
it is then possible to examine the value of this for a range of
values of A without, in many cases, a great deal of computation.
Therefore, if J can be found by some means, the values of e J and
I might be found so as to obtain a better approximation to the
solution of subproblem 3.3 than that implied by simply using the
value of 8 which minimises c' (0j). The problem to be solved
is then:
t. eT'?. (B- te)L • cis (0J )
( B-4 13.1- (4i. s.t. c.13- ( ex) < 0
[B-' las (G°')].t. ' o
W.12),.. /r B-11F0 teni . 2...
I T ‘ ii t,
Of course, by pre-selecting J as the value of j we allow that, in
general, the solution of 3,4 is not the same as that of 3.3; but
it could be expected to be a better approximation than that used
by the Revised Simplex strategy.
An obvious approach to the solution of 3.4 is to begin by
choosing J as before by minimising each of the c'1 with respect
toitsvariable60.Ilithiscaselhoweverlthellableeis min
discarded, and only the subscript J is retained. This approach,
therefore, can be regarded as one in which the basic strategy is
improved, starting at the usual point. It is useful to introduce
the following notation:
3.4
-153-
e min . The value of A J giving the minimum value of
es (e ), and therefore the absolute minimum of c , (e i).
e) opt . . The value of 0 solving problem 3.4
j linin
. The value of i corresponding to 0 min'
that is •
the value found by the standard F.L.P. strategy.
1.17(t9j)F- (§-'13)i. IL 8-11',- (93-)1.,
L3 (eJ)-e r17 (ex) c /(6 7)
For any value of i, therefore, we wish to find the value of 9
which minimisesp ij; but as 0 changes, the value of i will
change at discrete intervals so as to keep rij(e ) a minimum
over i. The situation is sketched in figure 3.18, which for
J . clarity assumes that i = 1, 2 only.At 0 J = 0 u min, the minimum
feasible value of/Dij is Pte. Now as 0 changes to 0 min
+.6.6J'
the figure assumes thatptj decreases. Meanwhile, rtj (0) increases until, at the point 110 A, it becomes equal to the
ratio for another index, rs,j ( ) which then becomes less
than rt,J
4.1% LI (0 ) as O is further increased. At the point
A therefore, the index i changes from t to s, and therefore
pij changes to /D which has its own variation with209 J.
/ 8,J
Consider the possible states which can limit the maximum value
of 4e.
(i) paj reaches an unconstrained minimum (figure 3.19)
-154-
FIc:uRE 3.18
piG,URE 3.2..o..,
Ps,a
-155-
This figure shows a situation where, after two transitions A and
B (the variation of the r curves which determined these transitions
is not sketched), the current curve of minimum feasible p reaches
an unconstrained minimum at pe c, and further variation of ea. is unnecessary. Note that this is a local minimum only: a
lower value might exist for some negative LO. (Heavy line
denotes curve of bestp ).
(ii) r- n s,J
increases after a transition (figure 3.20)
This figure is self explanatory: the minimum is at e J +4Nej A.
Figures 3.18 - 3.20 show some of the features one might expect
from the curves r and p. In the F.R.P. case it is easy to show
that both these sets of curves are, in the main, continuous, and
so is the composite curve of p8 1
,. Another feature concerns a
consequenceofthechoiceofe min as the starting point for the
^ search for 04 opt
. Consider the definition ofp ij:
3.) L.q." lox ( ea.)]
Expanding about cat min
, to first order we have
Pi.j. (07-4- AO)
( 13:1 F)i. rni.'n) cr ( mi n ) -1- ,6,0 O To
B 1 13,3 ÷ 4 J. (e. ) t
3.S
-156-
cf n Since , (A min) is zero by definition of u the slope
'D 0 1) min'
-1 /AJ N) orpij at 0 jmin is determined by the slope of llosk urvit4ji
Since the direction of reduction offij is the obvious direction
to begin the search for 0opt' and since the denominator in 3.5
is constrained to be positive, the clear choice for direction
Jr- of search is along the positive e direction if:
((AI <
and vice versa.
Before considering algorithms for solving 3.4, it remains
to examine the forms of r andp for the specific case of the
F.R.P. optimisation problems. This is easily done since, from
2.30, we can write the following expressions:
ca. (93-) = ot, z + oe cos 487+ o< s 403-4- ,
(4 3,3_ Cos 2(9 7 + 0 4z Si„, (6-lips (97)}1, 11 Po)), c 4- /31,3- i CO5 4497 + • • • /341 I, 5■-^ j (Whereoql are different from those defined on page 150)
Hence the equations become:
• (ea) = NJP)i. /( 4 • • 134, S" 2 9 1 1-•
(9,7-) [10/0,0. 4 cie.$1 Sin 201 if - 134,33 i. (8:111 3.6 defines two families of curves for a given J, each with a
member corresponding to every value of i. These curves are
clearly continuous except when, for some value or values of i
and e J, [B.-11)j( VT )} = 0. So long as (13-1?)i > 0 for such
values of i, that is, excluding degenerate cases, such zero values
of the denominator implyri = 00 for these i and 0 J. Since,
however, we are concerned with the least - positive - valued
3. C.
-157-
members of the r family for every value of e J, such discontinuities are automatically excluded from consideration. The problem,
therefore, is to find a local minimum of a one-dimensional
continuous function with piece wise continuous derivatives, where
the position of the discontinuities are determined by relative
values of a set of continuous differentiable functions. The
equations of all the functions are known. In fact, actual minima
of iDij are not needed, because any improvement over the objective
value at the starting point is welcome. In principle then, a
means of accelerating the convergence of the F.L.P. algorithm
seems to be easy to devise. There are, however, risks involved
in such a simple approach.
Rewrringto figure 3.18, consider the conditions at the
transition point A. At such a point the following condition
holds.
rs,j = rt,j
The implication of this is as follows. Using the notation ajaZn:
of (0) 8-'0 (ou) and - B
-1P, we have :
Ps _ SE (Xs ;4..
Either rsJ
rt j or could have been chosen as the minimum ratio. ,
If r is in fact chosen, the value ofp t after pivoting will so7
be given by:
f3-t pt 2-171e f5 ce - kr 5/ - ok s
Hence, a tie for the choice of rmin
invariably results in a zero
element in B-1P on the next iteration - that is, in degeneracy.
-158-
Thus in the case shown in figure 3.18, in choosing the value of
0 J corresponding to the point A, rather than e min' one would
improve the function reduction on the current iteration at the
expense of incurring degeneracy on the next. Since degeneracy
implies a zero function reduction, the result of the two
iterations may well be a lesser reduction than might otherwise
have been obtained. A subroutine was written to test the effect
of altering e min in the way described above. Its basic aim j was, beginning with B min'
to determine the maximum reduction
in the function to be gained on that iteration by varying 0 J.
Having determined this value and the corresponding value of
^ J toi , the procedure computed the amount by which this quantity
must be modified to ensure that rI(04 ) was still a minimum
over r.. If this final result gave a better function
reduction than iv Jmin,
it was used instead. Otherwise, 0 min
was accepted.
This subroutine was used, together with an early version
of OPT5, the F.L.P. subroutine, to solve the sheet-with-hole
problem already described. This version of OPT5 differed
from that listed in app.2.2. mainly in incorporating a non-
revised Simplex algorithm: algebraically it was almost
identical, and was the program used, though without acceleration,
to obtain the sheet-with-hole results. The results are
summarised in table 3.13 while figure 3.21 illustrates them.
The first point to make concerning the accelerated run is that
the function reduction is, on almost every iteration, better
than would have been achieved had that iteration been carried
out without acceleration (this quantity was also computed).
21. *£' 3 ma au_
L 0 o oo •o- t ao ao • 0} I. 000 000 • 0 — t .9. 2 9
1 C?
tO•2 W.-31'V 'D 3 D.N9 4) -Oa A N o 7
91.9 oo cco • 0 — . I) 51On • 47 L 0) L S 10300 000 •o - SE/0(7) 1 ' 17 L- 003 .
TYPL ii,((A0(1,J),I=1.3),1=1,6) C copiroft GLunAL 'STIFFNESS COVONENT HATRICF.Sro'
DO 106 jj=1,6 DO 1110 KK:41,S KG1(JJ,KK)=0.0 K02(JJ,KK)=0 ,: d 167;(jj,K10=0., 0 KG4(JJ,KK)=0,11 KW;(JJ,KK)=0;0 DO 1(16 JK=1,3 KG,IAJ1,V,K)=KGI(JMK)+AAW,JJ)*K11-(JK,KK)
1/7 Of;IAJJ,IM=K1;0(JJ.KR)+KG';(jJ,JK)*C1(jK,KK) TYPE 12,(CKKG1(JJJ,KKOIKKK=1,6),jjj=1,6) TYPr 1;),C(KKO:!(JJJ.KK),KKK=1,6),A1je1,6) TYPE 12,((KKG3(JJJ,KKK),KKK21,6),Jjja1.,6)
12 FOHAT(O(;;Y,F6.2)) C WRITE `,T IF-FTC 0AT1tICES TO DISC,
CONTINUE 0095; NOt=NO—NSUP 0005 NOmrDi (1006c C 0096;• DO 311 1=1.00 00967 P(1)=41s 00964 DO 311 J.11040 0006r; 311 p(1)=1,(1)*K(i,j)*DSAV(J) 00066 TYPL .310,(P(I),In1+140) ip970 C K IS coliPLETC. 00077 C AUJUST DUAL VAulAnLES 00974 DO 121 I=1,ND1 00976 1,21, IF(VSAV(I),ELOODUAL(I)m”DUAE(I) 01198'1 C 00990 DO 17 I=18NO1 01010 GRAD(1)=C.0
tOES1 02/FIE33, P • 0 PSAV DSAV GEIM.L.Ni.LqS2,LHS3s 2LH:34,LHS5 sl,STSP SLII, PCOL 3T,I4 ONSP,W,IFEAS,00,DOSAV,DUAL,RHS,G10:K a NDOF s 40Th.RES)
GO TO 16 RE_ URIC Eh!)
r •
-317-
APPENDIX 4.4
Copies of the following two papers:
(1) Reference 1.2
(2) 'A quasi-linear programming algorithm for optimising
fibre-reinforced structures of fixed stiffness: This
paper covers much of the same ground as chapter 2,and
may serve as additional clarification.
Int. J. Solids Structures, 1974, 10, pp. 309-312. Pergamon Press. Printed in Gt. Britain.
A NOTE ON THE MAXIMUM NUMBER AND DENSITY OF DISTRIBUTION OF MEMBERS IN ELASTIC STRUCTURES OF MINIMUM WEIGHT
UNDER MULTIPLE LOADING CONDITIONS
J. J. McKEowN Numerical Optimisation Centre, Hatfield Polytechnic, Hatfield, Herts
(Received 17 January 1973; revised 2 July 1973)
Abstract—The problem of minimum weight design of elastic structures under multiple loading conditions is considered. It is shown that the problem can be expressed as a search for feasible deflection patterns coupled with repeated searches for structures of minimum weight for given stiffness. The latter is a Linear Programming Problem and implies an upper limit, different from that set by connectivity, on both the number and distribution density of elements present in the minimum weight design.
The problem of optimising elastic structures in the minimum-weight sense is one which is now receiving increasing attention, see e.g. [1]. Perhaps the largest area of effort is that of elastic structures under alternative sets of applied loads, when limits are placed on the stresses in the elements of the structure and the deflections of the nodes. Although some work (e.g. [2]) has been directed towards choosing the geometry of the structure, i.e. the number and positions of the nodes, the problem of choosing cross-sectional areas of members in a structure of fixed geometry is the best that can be hoped for in many cases.
This problem can, in general, be formulated as follows (using vector notation):
Minimise IVA 1(a)
Subject to:
SL < Si(A) 1(b)
71. 1/,( A) 17. 1(c) A 0 1(d)
j = 1, 2, ... , M where iv and A are vectors of weights/unit cross-sectional area and actual cross-sectional area respectively, Sj and 13 are respectively values of stress failure criteria and deflection under the jth applied load set P. Let the structure be defined as a set of nodes of given coordinates, joined by an arbitrary number of members N. For any value of A, the deflection can be computed from:
= 'Pi (2)
where K, the stiffness matrix, is a linear function of A. Then, can be computed from and the individual element stiffness matrices.
309
310 J. J. McKeowN
We will now consider an alternative formulation which sheds more light on the nature of the problem than formulation (1) in the particular case of elastic structures of fixed geometry. Note first that the stresses, being linearly dependent on the strains, are also linear functions of the Vi and so the Si (which may simply be vectors of stresses, as in a pin-jointed structure: or nonlinear functions of stress, e.g. Von Mises Criteria) can be written as functions of Thus, if the weight function can also be expressed as a function of Vi , formulation (1), a problem in A, could be replaced by a problem in rip Let such a weight function be designated W(Vi , VM), W(Vi)). Then (1) becomes:
Minimise W(Vi) 3(a)
Subject to:
SL < S(3) < 3(b)
< V.; < 3(c)
j -= 1, 2, 3, ..., M 3(d)
Where the search is confined to values of Vi for which
W(Vi) > 0
Now consider how W(Vi) must be defined if a solution to (3) is to be identical with a solution to (1). Clearly, for this condition to hold, W(Vi ) must be the minimum weight of a structure of the given geometry which will exhibit the deflections Vi under the loads Pi , at the same time, of course, satisfying the equilibrium and compatibility equations of the structure. Hence, W(Vi) is defined
W(Vi) {Min WA) 4(a)
Subject to:
Pi = K(A)V; 4(b)
A 0 4(c)
j = 1, 2, ... , M.
Now K, the stiffness matrix, can be written
K = E ditk i ai (5) =
where di is a transformation matrix which is only a function of geometry; and ki is an element stiffness matrix, linear in A. Since, in equation 4(b), the vectors Vi are given, the equation is in fact a set of linear equations in A:
B./ A =P; 4'(b)
where
B; = V; a2ik2' az Vi
HantknianFil and
ki' = kilAi , the constant part of k i .
Maximum number and density of distribution of members in elastic structures 311
Let D be the number of degrees of freedom of the (supported) structure. Consider the equation 4'(b). Each vector P, has D components, and so 13; has D rows. The vector A has N elements, so 11 has N columns. It follows that 4'(b) represents M x D equations in N unknowns. There are two cases to be considered. (i) Mx DAN. In this case, formulation (4) is clearly a Linear programming problem in A.
M x D > N. Formulation (3)—(4) is then not strictly equivalent to formulation (1) because equations 4'(b) cannot be solved for arbitrary V;, i.e. W(V1, ..., Vm ) is not defined for some set of values of Fi ; additional constraints would have to be included in (3) to ensure compatibility of 4'(b). However, if a solution to the problem exists, then the formulations are equivalent at the solution.
From these considerations, the following theorem can be stated:
Theorem The maximum number of elements in an elastic structure of minimum weight for a
prescribed geometry, subject to stress and deflection constraints under multiple alternative sets of applied loads, is equal to the product of the number of load cases and the number of degrees of freedom of the supported structure.
The theorem follows from the well-known Linear Programming result (e.g. [3]) which states that a linear program with M equality constraints and N variables, has, at the solution, at most M non-zero variables. Thus it is true in case (i), and is automatically satisfied in case (ii).
There is an interesting corollary to the theorem. Consider a minimum weight structure having deflections say Any Any substructure S1 of such a system can be considered in isolation, so long as no changes are made to St which alter the deflections, i.e. the stiffness of Si . Clearly, S1 must be the structure of minimum weight for that stiffness, since, if it were not, a substructure of lower weight could be substituted without altering VI*; since the stress and deflection constraints are functions of V; alone, such a substructure would also be feasible. This violates the hypothesis that the initial overall structure is of minimum weight, and so the corollary can be stated:
Corollary 1 The limit set by the main theorem applies separately to every substructure within the
total structure. Thus, there is an upper limit on the density of distribution of members within a
minimum-weight elastic structure. (It should perhaps be mentioned that corollary 1 does not imply that an optimum structure can be arrived at by optimising substructures in isolation, but merely that a structure thus designed would be subject to the same limits as a true optimum structure.)
To illustrate the implications of the theorem, consider the case of a pin-jointed frame, subject to one load case. Here, the theorem implies that the number of elements in the minimum-weight frame is equal to the number of equilibrium equations at the nodes. This could mean that the frame is statically determinate; or that it is redundant in some areas, and a mechanism (which happens to be stiff under the particular load set) in others. How-ever, corollary 1 denies the possibility of the second case, and so we can state:
312
J. J. MCKEOWN
Corollary 2 The minimum weight pin-jointed elastic frame of prescribed geometry, under one load
set and subject to stress constraints and/or deflection constraints, is statically determinate. Corollary 2 is of course well known, at least in the case of either stress or deflection
constraints; the reasoning above shows that it is simply a special case of a more general theorem which applies to a larger class of structure and loading requirements.
The limits derived in this note in fact refer to the optimisation of any elastic structure for which both weight and stiffness are linear functions of the design variables. The stress constraints can be any function of deflections, and so can the deflection constraints. The actual form of such constraints only modifies the feasible region in the space of the deflec-tions in sub-problem (3), while leaving unaltered the form of sub-problem (4) on which the theorem depends.
REFERENCES 1. G. G. Pope and L. A. Schmit, Structural design applications of Mathematical Programming Techniques.
Agarbograph No. 149 (1972). 2. W. S. Dorn, R. E. Gomory and H. S. Greenberg, Automatic design of optimal structures. J. de Mech.
3,25-52 (1964). 3. S. I. Gass, Linear Programming. McGraw-Hill (1958).
A6cTpaNT — HccneHyeTcH mama pac9era Ha MHHHMYM Beca ynpyrxx xoHapyictudi, npH yC.TIOBHAX mHoroxpaTHoit HarPY3KH. Oxao 1Baeres, .rro 3anaga BmpaxaercH B xmecTse HccneHoBaHHH BO3MO)KHbIX itopm nporn6a, conploBeHHoro C HOBTOPHUMH HOHCKBMH ICOH.• crpyxuHil Ha MHHHMYM Beca, AIM oaBaHHoll XeCTKOCTH. HOCTICAHAA oaza‘la HarilleTCA oasztaHeil JIHHettHoro nporpamammoBaHHH H 3BKIIKiaer B ce6e BepxHHII npeHen, OTJIHTHEA OT 3TOT0, nocTpoeHHoro nocpeTtorBom CBH3HOCTH, OTHOCHTeHbH0 H ,mcna H 11110THOCTH pacnpeLteneinui onemewroB, npHcyrompoLuHx B pacHere Ha mmuudtym Beca.
A QUASI-LINEAR PROGRAMMING ALGORITHM FOR OPTIMISING FIBRE-REINFORCED STRUCTURES OF FIXED STIFFNESS
J.J. MCKEOWN The Hatfield Polytechnic Numerical Optimisation Centre,
19 St. Albans Road, Haffield, Herts., UK
Received 16 December 1974
This paper deals with the problem of optimising multilaminar, fibre-reinforced continua. The main constraint is that of fixed stiffness in the strict sense that deflections are fixed under given loads. It is shown that an algorithm can be proposed, based on the simplex method of linear programming, which solves without linearisation the nonlinear mixed-integer programming problem involved. Numbers of layers, their thicknessesm and their fibre-directions are all optimised simultaneously. Numerical results are presented, and the wider relevance of the restricted problem under consideration is discussed.
Nomenclature
IV Volume of structure. In section 2.1, a kg general linear objective function
N Number of finite elements. Number of eci bars V
M Number of degrees of freedom L N-vector; L1 gives the number of layers
in the i-th finite element Array with N rows; is the j-th element of the i-th row and represents the reference B angle of the j-th layer in the i-th finite element. The superscript-subscript nota-tion is used for ease of distinguishing between variables (01 , OZ ... ON ) and individual values of such variables in the description of the algorithm
T Array of layer thicknesses; 7 corresponds to 01; above. In section 2, N-vector of cross-sectional areas
A N-vector of areas of finite elements P M-vector of loads K Stiffness matrix (M X M) of the structure
to be optimised
Stiffness matrix (in global coordinates) of the j-th layer in the i-th finite element Interpolation matrix Al-vector of deflections 3 X 3 matrix of material stiffness coeffi-cients (function of fibre angle). In sec-tion 5.2, number of load cases Vector of thicknesses (see text) M X M array; the i-th column is the set of forces associated with the i-th element under the deflections V if the element had unit thickness. In section 2.1, a general In X n matrix In section 2.1, number of equality con-straints In section 2.1, number of variables n-vector of cost coefficients n-vector of L.P. variables nz-vector of constants (n — m)-vector of reduced gradients of a function f Special cost function m-vector of special variables General variables
in
11 1 x d cf
cS y X
124 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
Introduction
The first impact of the digital computer on structural design was in the area of stress analysis, and the 1960s saw a dramatic development of algorithms and programs for solving large-scale problems in this field. The effort expended on the development of finite element methods of analysis on the one hand, and increasingly powerful computing systems on the other, has led to a situation where large structures can now be analysed rapidly and economically. However, stress analysis is only a means of determining the behaviour of a structure; it provides information which must then be used by a designer to find an improved design or to confirm that a current desing is acceptable.
A natural progression in the application of computers to structural problems is to attempt to automate more of the design loop. Although the simplest approach is simply to automate as far as possible the traditional design techniques, the most theoretically promising formulation is in terms of mathematical programming. This is a subject which, like stress analysis, has received a tremendous boost from the combination of increasing computing power and the need to find answers to practical problems — in this case mainly in the field of economics and planning. The mathematical programming problem is defined as follows:
min F(x) x
subject to
E f(x) = 0 , i= 1,2,...,N1 ,
G i(x) >0, i=Ali +1, N i +2, ..., N2 ,
where F, E and G i are linear or nonlinear functions of the N-vector x. If F(x) is nonlinear, the problem is still defined when N1 = N2 = 0 (the unconstrained problem).
Modern developments began with linear programming (L.P.) (F, Ei and Gi all linear), and today a wide range of algorithms is available for both linear and nonlinear problems. Many of these have been applied with success to structural optimisation problems (ref. [ 1] is a good reference report). However, the search for mathematical programming algorithms which are capable of optimising large structures cheaply and reliably is still far from a successful conclusion and indeed, in recent years, some workers have returned to traditional approaches as offering more hope (see [2] and [3] ). This has led to a class of "optimality condition" algorithms which, rather than minimising a defined objective function, seek to satisfy a criterion such as uniform stress or strain energy which can be identified as a desirable property of a good design. Such methods can be spectacu-larly successful, but sometimes lack the reliability which can be achieved by the more rigorous mathematical programming approach.
Against this background a new field of application has presented itself. The invention of high-strength, fibre-reinforced composites such as boron-and carbon-reinforced resins has provided structural materials which demand new optimisation techniques for their fullest exploitation. The problem of optimising both layup (i.e. fibre angle) and material distribution effectively adds a new dimension of difficulty to the structural optimisation problem, as compared with the
J.J. McKeown, Algorithm for optimising fibre-reinforced structures 125
homogeneous material case. The problem of finding algorithms capable of optimising such struc-tures cheaply and reliably is therefore seen to be formidable but probably worthwhile.
This paper confines itself in the main to a restricted problem, namely that of finding minimum volume laminar structures of fixed stiffness under a given load set. The approach is a mathematical programming one and involves a generalisation of linear programming. It will be shown that in this case a simple algorithm can be constructed which will simultaneously optimise layup, numbers of layers at any point, and thicknesses. Results are demonstrated on a particular structure. The restricted problem will be placed in perspective against the wider field of optimisation of fibre-reinforced structures.
1. The problem
We shall consider the following problem: A two-dimensional plate is idealised into a number of finite elements. It is loaded and supported in its own plane. The deflections at the nodes are specified, and are not all zero, but are sufficiently small for linear theory to apply. It is required to find the plate of minimum volume which can be constructed from layers of linearly elastic fibre-reinforced material such that the given deflections will occur under the specified load. The reinforcing fibres in each layer are to lie along mutually orthogonal directions so as to produce an orthotropic material. Each finite element may consist of any number of layers, the layers being distinguished from one another by the orientation of their fibre axes relative to a reference axis system; they may be of any thickness.
This can be expressed as a mixed-integer mathematical programming problem as follows:
N Li
Min W, W= E E L03,T 1=1
I 1=1
subject to
K(L, 0 , T)V = P
Li positive integers
>
O< ir/2
The vector L specifies the number of layers in each element, while 0 and T are the corresponding matrices of angles and thicknesses. The constraint (lb) is the compatibility-equilibrium condition, where the deflection vector V is given, and K is of course the overall stiffness matrix of the struc-ture. Note that not even the total number of variables is specified a priori, since the optimum number of layers is an open question at this stage.
It is necessary to consider the explicit form of K as a function of L, Oand T. The stiffness matrix can be expressed as
N Li
K = E E p I 71.) (2a) (M X M) i=1 1=1
i=1,2,...,N, j=1,2,...,Li .
126 J.J. McKeown, Algorithm for optimising fibre-reinborced structures
where
kit = fat.° (el) cc d V , (2b) X v I 1
and u is the volume of the element. Here, k'1 is the stiffness matrix of the j-th layer in the i-th finite element, expressed as a function of the fibre angle which characterises a layer, while a i is an interpolation matrix which is fixed by the geometry of the finite element so that the depen-dence of kip on 01 . is, as in (2b), expressed by the angular variation of the material stiffness matrix Q. (Note that, in order to avoid introducing unnecessary quantities, the a matrix includes the transformation from an element to a global reference system.) Ref. [4] quotes a formula for Q in terms of 0. This formula is quoted in full in Appendix 1; in the case of an orthotropic distri-bution of fibres it can be expressed as
(3 X 3) Q = xo + Ki cos 40 + K 2 sin 40 . (3)
Substituting (3) into (2b) gives an expression for the j-th layer in the i-th finite element of the form
ku = + k 1 cos 40 + k2 sin 40) , (2c)
(where it is convenient to keep the layer thickness 7, separate. We now introduce a vector D which is simply an ordering of the
D T21 , T31 , ..., , , TIZA, } .
Substituting (2c) in (2a) and thence in (lb) gives
N Li
II E + cos 40i + ki2 sin 40) V = P , i=1 j=1
and, since V is given, this is properly a set of linear equality constraints in the 7, which can be written
B(0, L) D(L)= P , (4a)
where B is a matrix defined as follows:
E B1 1 Z]B z , B11 , ..., B N , (4b)
-= (kis + cos 40i +k2 sin 40;) V .
Therefore B is the matrix whose columns are the forces contributed by unit thicknesses of the various layers under the given deflections. The problem is thus to determine the numbers, thick-nesses and angles of the layers in each element so that (1a) is minimised subject to (4a) and (1c).
J.J. McKeown, Algorithm for optimising fibre-reinforced structures 127
Clearly, if ()and L are known, both (1a) and (4a) are linear in the layer thicknesses, and if NL = X7._ i Li is greater than or equal to Al, the problem is simply a linear program in D. The following section will show that this fact is the key which enables the problem to be completely solved if a solution exists, and it also enables some useful features of the optimum design to be predicted in advance. To develop this, a simple structure which is, in this context, analogous to the fibre-reinforced plate will be introduced. It will be used to illustrate the way in which linear program ming can be used to solve a simplified version of the problem and to introduce the main features of a linear programming algorithm to readers who may not be familiar with them. It will then be shown how the simplex method of linear programming can be generalised in such a way as to solve the simple structure without restricting 0 and L to predetermined values. The method thus introduced will then be applied to the plate problem, and numerical results will be given. Finally, the extension of the method to the case of multiple alternative loads will be briefly discussed, as well as the wider significance of the problem in structural optimisation.
2. An analogous problem
Consider the structure shown in fig. 1. It consists of a point at which the loads P, and P y are applied. This is connected to given points along a line by means of a specified number of straight,
Fig. 1.
pin-jointed bars of an elastic material. It is required to determine the cross-sectional areas T i of the bars so as to minimise the total volume of the structure, subject to the requirement that the point of application of the loads must deflect by the specified amounts Vir and Vy . This is analogous to the plate problem when the number and angles, but not the thicknesses, of the layers are predetermined, and where M = 2. Let T be the N-vector of cross-sectional areas Ti . Then the problem can be expressed as
Min IV , IV = E 1,T, i=i
subject to
BT = P = {P„, P y} ,
128 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
0 , i = 1, 2, ... .
Now B can be written
B= [k i V;k 2 V ;kw ,
where V = {Vx , Vy } , and ki is the unit thickness stiffness matrix of the i-th bar for loads and deflection at its upper end:
ki = E -cost 0 i sin Oi cos 0; sin2 0 ;
sin2 0; cos O f sln3 O i
Using the fact that i = 1 /sin 0i , the problem becomes
Min W, W Ti/sin O i i=1
(5a)
subject to
cost 01 sin 0 1 Vx + cos 0 1 sin2 01 V y
cos 01 sine 0 1 Vx + sin3 0 1 V y
cos2 O N sin O N Vx + COSON sin2 O N Vy
COS O N sin2 O N Vx + sin'O N V y
1 ' T = E — P (5b)
- 0 , i=1,2,...,N. (5c)
If N > 2, this is a linear programming problem. The number of variables is equal to the number of possible bars, while the number of equality constraints is equal to the number of degrees of freedom of the structure. There is obviously one column in B for every variable. Although the bars are to be chosen from a finite set, the solution to (5) will involve a degree of layout optimisa-tion in that some of the cross-sectional areas may be zero in the optimum structure. In fact the linear programming nature of (5) implies that all but two of the bars must disappear, so that the problem consists in choosing two bars, together with appropriate cross-sectional areas, from N. The next subsection will, for the sake of completeness, describe very briefly the simplex method of solving linear programming problems with equality constraints.
2.1. The simplex algorithm
Consider the general problem
Min W, W = ct x (6a) x
subject to
J.J. McKeown, Algorithm for optimising fibre-reinforced structures 129
Bx = d , (6b)
xi > 0 , i = 1, 2, ..., n , (6c)
where B is an m X n matrix of real numbers, m < n, and di > 0, i = 1, 2, ..., m. An important concept in linear programming is that of "basic" and "nonbasic" variables. Con-
sider an arbitrary division of the variables into two groups, represented by a vector x' of length m, and a vector x2 of length n — in. The matrix B can always be correspondingly partitioned into submatrices B' and B2, where B' is square; and c into c1 and c2 . The objective function can thus be written
W = (c1 )t xl (c2)t x2 , (7a)
and the equality constraints are
Bi + B2 x2 = d (7b)
If B' is nonsingular, then
= (B1 )-1 (d — B2 x2 ) . (7c)
Using (7c) in (7a) we obtain
W1 [ (c2)t (cl)t (B1)-1 B2 x2 , (7d)
where W 1 = (cl)t(Bl)— d. Clearly, if the values in x2 are chosen arbitrarily, the vectors x1 and x2
will satisfy the constraints (7b) so long as x' satisfies (7c). We shall now consider the optimality conditions on xi and x2, bearing in mind that at the solu-
tion all the variables must have nonnegative values, by (6c). First of all, we introduce the vector
(c2)t (ci )t (B1)-1 B2
of order n — m. This is called the "reduced gradient" vector; it gives the steepest ascent direction for the function W if the variables are always constrained to satisfy (7b).
Let us now examine the i-th element of x2 at the solution, together with the corresponding element of c'w . Three cases are to be considered:
(i) (4)1 > 0. Then from (7d), any decrease in 4 will further reduce W; so, if x2 is optimal, 4 must be zero (since no further decrease in its value is then possible).
(ii) (4)1 < 0. Then the solution cannot be optimal, since W can be decreased by increasing 4, and this will not violate the positivity constraint. If, in increasing 4, we cause one of the x' elements to decrease to zero, that element can be exchanged for 4. The new value of (c w )i must then be examined.
(iii) (c'w )1 = 0. Then 4 can be reduced to zero without violating (6c). If, in the course of
130 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
reducing any element of x' becomes zero, then this element of x' can be interchanged with xl as in case (ii).
This reasoning, though not purporting to be an exhaustive proof, should serve to demonstrate that, at the solution, x2 will be zero; in other words, a nonbasic set of variables, n — in in number, can be found, all of which are zero; and the corresponding reduced gradient vector c'w will have all elements positive or zero. A vector x which satisfies (6b) and (6c) is called a feasible point; if in addition at least n — m of its variables are zero, it is a basic feasible point. The argument above indicates that the solution to an equality-constrained linear program is a basic feasible point. Since setting x2 = 0 in (7c) yields
= (B1 )-1 d , (7e)
it follows that basic points are generated by choosing in columns from B and solving for x' ; if all the elements of x' turn out to be nonnegative, such points are also basic feasible.
The simplex algorithm, devised by Danzig in 1947, sets out to solve linear programming prob-lems by generating basic feasible solutions which systematically reduce the value of W. Any such algorithm must converge simply because only a finite number of basic feasible solutions can exist for a given problem, and the requirement that the function value must decrease on each iteration means that no such point can occur more than once. (The case where no reduction in W can be made on some particular iteration is called the "degenerate" case and will be touched on later.)
The algorithm begins from a known basic feasible solution. On each iteration, the elements of c'w are examined. It all are nonnegative, then a solution has been reached. If not, the nonbasic variable corresponding to the most negative element of c'w is allowed to increase. If this causes all the elements of x' as calculated from (7c) to increase, then the problem is clearly unbounded; no solution to the problem exists. Usually, however, at least one element of x' will tend to decrease as the nonbasic variable is increased. The first such variable actually to become zero is chosen to leave the basic set and replace the nonbasic variable which is now positive. The result is a new basic feasible point which produces a lower function value. The case when one of the x1 variables is zero to begin with and decreases with increasing value of (x2 )i is the degenerate case; the itera-tion then results simply in a change in the basic set which usually leads to a nondegenerate case on subsequent iterations. The simplex algorithm is so arranged that the inverse of B' is continually updated so that repeated inversions need not be done; this is of course made possible by the fact that only one column of B' is changed on each iteration.
The actual operations of the algorithms are usually represented in tableau form. The initial tableau can be generated by arranging the equations (6) in the following form:
x i B' B2 0
x2 = y (c2)1 '
where the objective function has been written —(cl )t x1 — (cz)t 2 X + W = 0. This set of equations is then transformed
0
McKeown, Algorithm for optimising fibre-reinforced structures 131
I ■ (131 )-' B2 0 x2 (.13 1 )-1 d 4 -
0 _ (c,2 )t ( ci ( Bi )-i B2! +1 (cl )t (BD' d
This enables us to write down the initial simplex tableau (table 1).
Table 1
X: x m 12 ... xl 2 2 X 1 ... xn-m IV
1 0 0
0 1 0
\ (B1) 1 B2
I
(BI )-1 d
1 _ _ _ _ _ _
0 -(cw), -(c'w)2 ... _fr ion_ rn +1 (cy (B1)--1 d
The variables have been arranged such that the first m constitute x'. Clearly the last column gives the values of x' and W. The next step is to chose the column from (13 1 )' B2 corresponding to the most negative element of c',; this decides which nonbasic variable will now enter the basis. The problem is then to decide which variable should be replaced in the basic set, i.e. which row of the new basic column should be the pivot element. This is decided by a consideration of (7c), which gives the change in the x1 vector for changes in xl as
x' + Ox' = 13-1 d - ((W)-' B2 )1 Axi2
where the first term on the right is the rightmost column of the tableau, and the j-th column of (B1)-1B2 is the new basic column. Since one of the elements of x1 is to become zero, and the others are to be nonnegative, we choose i such that
0 = Min {((B1 )-1 d)i - (13-1 B2 ))l , i = 1, 2, ..., m ,
((111 )-1 B24 > 0 ,
i.e. select i such that ri = ((B1 )-1 d)i ((B1 )-1 B2 )i = Min > 0. The tableau is then pivoted on ((B1 )-1B24, and the i-th element of x' drops out of the basis to be replaced by xt. The algorithm the proceeds as already described.
The following special cases are important (i) No initial basic feasible solution known. This is in fact the usual case in our application.
The problem is then solved in two phases. In the first phase we introduce m new variables:
y i , y2 y„, } = y •
132 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
Associated with them is an objective function c5 = yi. The secondary problem is then posed:
Min d, = E yi x,y i=1
subject to
Bx + y = d ,
ct x — W = 0 ,
xi 0 , i = 1, 2, ..., n ,
0 , j = 1, 2, ..., m ,
0.
This is another linear program, for which the basic feasible solution y = d is known. If a solution to the primary problem exists, then c.5 can be driven to zero; the resulting value of x is clearly a basic feasible solution for the primary problem. The "special variables" y are then dropped, and phase 2, the solution of the primary problem, can proceed. Conversely, if d cannot be reduced to zero, then no solution to the primary problem exists.
(ii)
= 0 for one or more values of i on some iteration. If ((B1 )-1 B); < 0, then no difficulty results; if not we have the degenerate case already mentioned. In such a case, although the basis can be changed, no change in the values of the basic variables can be made without causing one or more of the basic variables to become negative. Thus the objective function cannot be reduced on that iteration. The basic convergence proof already stated thus breaks down, and cycling, i.e. generation of a cyclic sequence of solutions is possible. However, although methods exist to restore theoretical convergence, these are regarded by most optimisers as unnecessary, and in fact no case of cycling has ever been reported in practice [5] . In consequence, the theoretical problem will not be further considered in this paper, although mention will be made of it in discussing numerical results.
2.2. A generalised algorithm
The above discussion of linear programming, and the simplex algorithm in particular, is not intended as anything more than a rough-and-ready introduction, and readers are referred to a standard work such as [5] for a rigorous treatment. The method to be described for solving the structural problem posed at the beginning of the paper depends on a generalisation of this tech-nique, and so the discussion of it takes as its starting point the simplex algorithm itself. Before proceeding with the development, it is useful to summarise two properties of the simplex algorithm and of the linear programming problem
(i) If a solution to the equality-constrained linear programming problem exists, then it is such that at most m variables have nonzero values, where m is the number of such constraints.
(8a)
(8b)
(8c)
J.J. McKeown, Algorithm for optimising fibre-reinforced structures 133
The statement must be modified when more than one equal-optimum solution exists. Then any convex combination of these solutions has the same value of W, i.e. when there are two optima, x* and x**, then any solution satisfying
x=Xx*+ (1—X)x**, O<X< 1 ,
is also an optimal solution, but is basic only when X = 0 or 1. It remains true however that at least one optimal solution has n — m zero variables.
(ii) The simplex algorithm will converge in at most (m") iterations unless degeneracy occurs, in which case convergence is not guaranteed.
Consider now a linear program such as (6), but with the modification that one of the columns of B, say b1, is not a fixed vector but a vector function of some variable 0. If we take, first of all, the case where 0 is restricted to a set of discrete values 0 1 , 0 2 , ..., Br , then it is clear that such a vector function is equivalent to r columns, each with an associated variable in the L.P.; and the problem can be solved by the unmodified simplex algorithm, each of the columns being enumer-ated explicitly and the whole treated as an ordinary linear program. If the variables associated with the vector function are denoted by xi, xj+1 , xi,r, it is clear that, like any other variables, some, all, or none may appear in the basis at the solution. It is equally clear that if 0 is a contin-uous variable, and b1(0) is a continuous function of it over at least some part of its range, then the introduction of b1(0) into the matrix B is equivalent to introducing an infinity of variables into the problem.
Let us consider how the simplex algorithm can be generalised to deal with this case. To do this, let a variable X(0) be introduced. This is a symbolic variable associated with b1(0): it repre-sents an infinite number of variables; for convenience, let j = n so that, at the beginning of the k-th iteration, the tableau is arranged as in table 2.
Table 2
1 1 2 X i Xm X1
X,—m_1 X(0)
I I (B1 )-1 bmi.,
( B1)-1 bn-1
0 (B I ) -1 b,(0)
0 (131 )-1 d
0 I - (c'w),
(cW)n- m-1 -(c'w)n (0) 1 (cl )t (B1 )-1 d
Now, the first step is to determine the column corresponding to the maximum element of — (4)/. Since —(4)n is a function of 0, clearly the maximum value of this is to be considered. We assume that a maximum in fact exists and is equal to p, say, and —(4),, assumes this value when 0 = Bk . If — (4)1 does not exceed p for any j, then 0k defines a new variable, X(0 k ), to enter the basis. In doing so, it eliminates one of the other variables, which may be an ordinary variable or a reali-sation of X for some earlier value of 0. It is convenient to introduce the term "general column" to refer to vector functions such as bn , "general variable" to refer to X, and to use the adjective "particular" to refer to values of these corresponding to actual values of 0. Thus, corresponding to the values O k , there is a particular column (B1 )-1 b n (0 k ), and this is the column from which a
134 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
pivot element is chosen in precisely the same way as for an ordinary column in an L.P. tableau. Once such a pivot element has been chosen and the pivoting performed, the tableau reverts to its original form, but with columns changed, including (B1)--1 b„(9). Thus, we have an updated cost (c'w)n (0) which must again be minimised as a function of 0 and so on. As the particular varia-bles are generated, they are added to the basis, but note that if they are not in the basis, they are not enumerated: if one is pushed out of the basis it need not be recorded because all the informa-tion relating to it continues to be stored in (B1 )-1 b n(0). Thus, although X(0) represents an infin-ity of variables its realisations never exceed m during any iteration, and this is the maximum amount by which b,,(0) extends the tableau. Indeed, this is true no matter how many general columns occur in an L.P. problem; there cannot be more than a total of m particular columns in the tableau at any time. The technique thus allows a problem in "infinite" dimensions to be solved without using any more storage than would be required if the vector functions were in fact fixed vectors. The particular variables, as they are generated, are identified by the correspond-ing values of X(0 1 ). X(0 2 ), .... Thus the values of 0 1 ,0 2 , ... must be recorded; the final solution will be defined by a vector0 , a vector of components x (stored in the rightmost column of the tableau as before), and a corresponding minimum value of W. It is convenient to complete the generalisation by regarding the "ordinary" variables x l , ... as general variables, with vector function variables 0' restricted to single values. The algorithm will be referred to as the quasi-linear programming (QLP) algorithm.
Before going on to see how this algorithm can be applied to the simple truss example at the beginning of section 2, its main properties will be summarised:
(i) A Quasi-linear program may involve one or more general variables. (ii) The total number of particular variables is equal to m, and constitute the basic set. The
old distinction between basic and nonbasic variables thus becomes modified, because when a particular variable is dropped from the basis, it ceases to be stored as a particular variable; it is in a sense reabsorbed in its "parent" general variable. The tableau only con-sists of basic (particular) variables, and nonbasic (general) variables.
(iii) The generalisation described above involves in effect an infinite number of variables; the assumption has been made that the solution found by the generalised simplex algorithm is optimal. This in turn implies that the solution is basic, that is at most m distinct values of 01 occur in it. While this is clearly true if 0 is chosen, not from a continuous range, but from a finite set of values however dense in that range, it cannot be assumed for the con-tinuous case. For the sake of formal accuracy, therefore, I ask the reader to regard the terms "infinite" and "continuous" in this context as "large but finite" and "uniformly numerous". Since the algorithm under discussion is intended for implementation on digital computers, this distinction is automatic in practice; it was not introduced initially to avoid blurring the outline of the method.
(iv) The simple list search required on each iteration of the simplex algorithm to determine the minimum value of c; is preceded in the quasi-L.P. algorithm by a set of one-dimen-sional minimisations, for which an additional minimisation algorithm is required. The quasi-L.P. algorithm makes no assumption about the nature of the vector functions in-volved; they may be continuous or discontinuous, and the associated costs c may have constraints on their variables.
J.J. McKeown, Algorithm for optimising fibre-reinforced structures 135
2.3. Complete solution of the truss problem
Returning now to the truss problem at the beginning of section 2, it can be seen that in terms of the quasi-linear programming problem described above the problem can be written
Min: (c, X(0))
subject to
(k(0)V, X(0)) = -E1- - P
X..-. 0 , 0=0 1 ,0 2 ,...,0 N .
Here, the notation (c, X(0)) should be clear from the foregoing discussion. The notation of (9b) is a concise representation of the generalised tableau, whose definition should also be apparent. k(0)V is obviously the single generalised column containing all the information needed to solve the problem. The advantage in this statement of the problem is clear; one no longer needs to store all the columns of B explicitly, thus making a saving on storage. One only enumerates the costs c' on each iteration.
However, the bars need no longer be chosen from a definite group, but can range over an in-definitely large set, "infinite" in our terminology. The general column k(0)V then becomes a continuous vector function, the elements of which are
(9a)
(9b)
cost 0 sin 0 v x + cos 0 sine 0 v 3,
cos 0 sin20 vx + sin30 v _ y , 0 < 0 < 7 , (9c)
where of course vx and v y are given. The simplest way to illustrate the application of the quasi-L.P. algorithm is to apply it to a
specific example. Let us take the case where vx = 1.0, vy = 0.0, Px = E, Py = 0. Since no initial solution is assumed known, we begin by introducing the special variables)), and y2 , and minimis-ing 0 = y1 + y2. The initial tableau is shown in table 3. Here, a blank column has been introduced corresponding to a variable T; this is a particular variable, not yet chosen. The last row is derived as follows: From (8b) we have
y = P — (B, X) ;
SO
cS = ut y = ut [P — (B, X)} , u = {1, 1} .
Hence, the reduced gradients of 6 with respect to X are
136 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
Table 3
X(O) T Yl Y2 W J
cos20 sin 0 1 0 0 0 1sin20 cos e 0 1 0 0 0
-c~ -1/sinO 0 0 1 0 0-cs + (cos20 sin 0 + sin20 cos 0) 0 0 0 1 +1
=-[1,1](10)
where (9c) has been used and of course the fact that B == k(e)V. This leads to
-c~(e)x(e) + d =utp,
which is the expression used in the tableau.We now proceed according to the algorithm already outlined:
Step 1Minimise the reduced gradient function over e (i.e, maximise -c~(e)):
This will be found to give
The new variable to enter the basis is then X(rr/4) = T 1 • The corresponding particular column isshown in table 4.
Table 4
X(O) T1 Yl Y2 W d
cos20 sin s
~1 0 0 0 1
sin20 cos s I 2 2 0 1 0 0 0-1/sinO -..[2 0 0 1 0 0(cos20 sinO + sin20 cosO) 1/..[2 0 0 0 1 +1
Step 2We now proceed to choose a suitable pivot row by examining the ratio of the first two elements
of the right-hand column to those of the particular column headed T1 , only positive elements of
J.J. McKeown, Algorithm for optimising fibre-reinforced structures 137
T1 column being considered. The minimum value is 0/(1/2 V-I"), and so the pivot element is that boxed in the tableau, and y2 is to be eliminated.
Step 3 Carrying out this operation, we obtain table 5. One of the special variables has thus been elimi-
nated and the particular variable T1 introduced with its corresponding parameter value of 19 = 7r/4.
Table 5
Tr/4
X(0) T Y1 T1 IV cS
cos20 sin e - sin20 cos° 1 0 0 0 1 2 f sin20 cos° 0 1 0 0 0 -1/sin 0 + 4 sin 0 cos 0 0 0 1 0 0 - sin2B cos() + cos20 sin 0 0 0 0 1 +1
Note that the general column and its associated cost functions have been transformed in the process. The new cost function for cS is
cs = — cos2 0 sin 0 + sin2 0 cos 0
and repeating step 2, we have
1 37r (c)min = —T-.)- , 0 = —4 .
The new particular column is therefore
{ l /,r2-- — 1 —2V-2 +1/} .
Again, the pivot element is boxed. Special variable y i is thus to be eliminated and replaced by a particular variable T2 corresponding to 0 = 37r/4. If this is done, (step 3 again), we obtain table 6.
Table 6
344 44
X(e) T T2 T1 W 6
0(cos20 sin a - sin20 cos()) 1 0 0 0 0 Nn(sin20 cos ° + cos20 sine) 0 1 0 0 -1/sine + 4 cos20 sine 1 0 4
0 0 0 0 1 0
The special variables have been eliminated and the basic feasible solution which has been found is shown in fig. 2. The weight of this is 4 units, as given in the third entry of the right-hand column.
138 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
Fig. 2.
Step 4 We proceed by dropping the last row and the sixth column, and minimising
cw = 1 /sin 0— 4 cos3 0 sin 0= I /sin 0— 4 sin 0+ 4 sin' 0
by setting
dc'w /d 0 = 0 = 12 sin4 0 — 4 sine 0 — 1 .
Thus sin O min = ± 1 /N/2, which gives a value of zero for )min. It follows that the basic feasible solution generated by phase 1 happens to be the optimal solution — no minimisation of EV is needed.
This example illustrates, very briefly, the main features of the quasi-L.P. algorithm. The actual storage space required in an automatic program would be less than in the illustration, since the unit vectors need not be stored; in fact, only the current general column, the right-hand column and the particular values of 0 need to be stored, together with a vector relating the elements of the right-hand vector to the 0 vector. The one-dimensional minimisations involved were simple, but of course any type of constraint might have been introduced as a condition of the problem. The one unusual feature of the problem is that the true solution was found immediately by minimising the special function 6. It may have been noticed that the structure in fig. 2 is the Michell layout appropriate to the loading given; the deflections chosen happened to be appropriate. It would seem that in this case the chosen load-deflection pair uniquely defines a structure. (A discussion on whether or not this is a general property of Michell structures is outside the scope of this paper, but it is noted in passing that a Michell structure was generated simply by finding the minimum-weight structure corresponding to an appropriate load-deflection pair without directly considering stress or strain constraints.)
Before leaving this illustrative problem, we can summarise the form in which the optimum structure was generated:
(i) The number of bars was equal to the number of particular columns in the basis: this quan-tity is analogous to L (in this case a scalar).
(ii) The angles of the bars were equal to the particular values of 0. (iii) The cross-sectional areas were the linear program variables.
J.J. McKeown, Algorithm for optimising fibre-reinforced structures 139
3. The plate problem
3.1. The quasi-L.P. algorithm
We have now seen that the truss problem, which was linear in the cross-sectional area variables and nonlinear in the layout variable 0, can be solved by a generalisation of a linear programming algorithm to give a design which is optimum with respect to both layout and cross-sectional areas. Returning to problem 1, it will be evident that a similar algorithm can be proposed. The variables Ti (i.e. the elements of D in (4a)) clearly correspond to the cross-sectional areas of the bars. A major difference is that in the case of the plate we have a number of general columns and variables, in fact one per finite element. Each general column, however, is exactly analogous to the single one which occurs in the truss problem — of the form kV; the difference, of course, is in the form of k. Note that, because we have more then one general variable, we also have more then one 0-parameter. The superscripted variables 01 , 02 ... ON will be introduced to denote distinct parameters; the particular values of 0' will form the i-th row of 0, the matrix of layer angles. The number of layers in the i-th finite element in the optimum structure will be equal to the number of particular columns in the final basis corresponding to the i-th general variable, and the angles of the layers will be equal to the corresponding particular values of the variables V
If we write (la) in a form similar to (9a), we have the objective function of the generalised problem
Min (A, X1 (01 ), XN (O N )).
The integer vector L does not now appear explicitly because, once the values of the Xi and 0 have been determined, L follows as described above.
Having set the problem in the context of the example already described, we can consider it in more detail. It is evident from (4b) that the form of the i-th general column is
(kio +k1 cos 40i + ki2 sin 40 i ) V .
This is a very simple form compared with (9c), the corresponding general column for the truss, and it leads to an easy one-dimensional minimisation problem for the reduced gradients. Another convenient feature is the fact that the coefficients of the i-th general column can be stored in three vectors, leo V, Tei V and le; V, and these can be updated individually. Thus, the coefficients for the whole tableau can be stored in 3 matrices, each of size M X N. The way in which these matrices are transformed on each iteration will be described later.
The form of the reduced gradient function deserves further discussion. Consider the first phase of the problem, where the special function 6 = E y i is being minimised in order to generate a basic feasible starting point for the main problem. We are concerned with the reduced gradients of 6 with respect to X1 , X2 , ..., and it can be seen from the same arguments as those leading to eq. (10) that these reduced gradients are the sums of the corresponding columns multiplied by —1. Thus the initial form of the i-th reduced gradient is
(01 =4 + di cos 40i + ai2 sin 401 . (11)
140 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
Again, since none of the general variables occurs in the initial basis, the initial reduced gradients (c'w )i are simply the cost coefficients of Xi — exactly as in the truss example — see table 1, third row, first column. In the present case these are not functions of 0, and are simply given by (e:,,)1 = A1. Now on each iteration a pivot operation is carried out, and this essentially consists in subtracting a multiple of some row of the tableau from each of the other rows, including the rows containing the reduced gradient functions. In other words, on the k-th iteration, the i-th reduced gradient of cS is modified thus:
Dr1 = (C ak (do + ail cos 40i + ai2 sin 40i)
where ao , a l and a2 are elements in the coefficients vectors of the i-th general column. It follows that the form of (eDi(0) is preserved although of course the coefficients change. Similarly, although the KA functions have initial forms without cos 40, sin 40 terms, they adopt the same form as the (c2i.
In the operation of the algorithm, therefore, we are faced with the trivial problem of minimising a series of functions of the form
f = as + a l cos 40 + a2 sin 40 = a0 \/17 2
1 a2 2 sin (40 + tan-1 (a1 la2 )) • (12)
Clearly, the minimum value of f occurs in general when
0 = (37r/2 — tan-1 (a i /a2 )) .
and fin will be less than zero unless a() is positive and greater than or equal to N/al + al. The special cases when one or more of the coefficients are zero are easily catered for.
We can now state the algorithm more formally.
Step 1 Compute the M X M component matrices kis , k2 for i = 1, 2, ..., N in the global coordinate
system, and form the partial coefficient matrices
[14 7.) /qv ... vi , i = 0,1, 2 .
Eliminate the rows of /no, B?2 and P corresponding to suppressed degrees of freedom and reverse the sign of rows corresponding to negative elements of P. Zero elements of the P vector should be replaced by small positive numbers to prevent initial degeneracy. These should be small enough to cause insignificant changes in the loading — say 10-4 X Emi_i
Form the submatrices containing the initial values of the reduced gradients for W and cS :
Al ■ A2 AN
Ut k17.71 lit k1V1 ' ut k. v, . _
where i = 0, 1, 2, and u { 1, 1, ..., 1}.
J.J. McKeown, Algorithm for optimising fibre-reinforced structures 141
The complete coefficient matrices are then
B71 B°= i = 0, 1, 2 .
The initial right-hand vector is set up using the load matrix modified in the way describe above:
P
P° 0
E P;
On the K-th iteration, PK will contain the values of the layer thicknesses in the current design. However, it holds no information relating the layers to their finite elements. Therefore, a re-ordering matrix RK is set up so that RK is the number of the entry in PK corresponding to the i-th layer in the j-th finite element, i.e.
(Ti!)K = i? (where r .
Thus R has N rows and a number of columns equal to the maximum number of layers which can occur in any element (see section 3.2). It is convenient to carry a vector LK specifying the number of layers in each finite element at the beginning of the K-th iteration. The definition of the design is completed by storing a matrix OK of the same form as RK , but with entries which specify the angles of the layers.
Initialise R° and L° to zero, set K = 0, = M + 2 and PHASE = 1.
Step 2 Form the row vectors 4, c , , 4 by selecting the M'-th row of B fic , BZ , Form the vector of cost functions:
CK =c + ci` + 4 s where
C = [cos 401 cos 402 cos 40Ni ,
S= isin 401 sin 402 sin 401 .
Minimise each of the reduced cost functions in cK to form a vector of minimum reduced costs cri;,in and a vector OK of corresponding particular values of the angles.
Find
d = min (4(nir )i , j= 1, 2, ..., N . i .
142 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
The corresponding values.ofj and O K are jmin and (I)K ., respectively. If d > 0, go to step 4.
Step 3 Note: In this step, I will be used for /min and J for jrni„ Form the particular column corresponding to J:
VK =(14)j + cos 443.; (bf )j + sin 441 (bK2 ,
where bj E J-th column of B. Find
r = min {lf/Viic l Vr) 0} , i = 1, 2, ...,M .
The corresponding value of i is /min . Form the pivot matrix
1-1 0 0 ... (q1 )1 0 ...
QK a- 0 1 0 ... (q2 )1 0 .
0 (qm I)/ 0 ... 1_
where (qi )1 is defined as
—VK/VI , i 1, (q1)1 =
1/VI , 1= 1.
Update the BK matrices and the PK vector as follows:
Br' = Br , i = 0, 1, 2 ,
pK+l = QK PK
It remains to update the design itself. First the layer originally corresponding to 1 is to be eliminated. This is located by searching the RK array for an entry equal to I. If this is the (i, j) entry, the following updating is carried out:
(Rfc)p = (MC )p+1
(43 = p+1 YC
Li = Li — 1 .
p=j,j+1,..., Li — 1 ,
J.J. McKeown, Algorithm for optimising fibre-reinforced structures 143
The new layer is then incorporated:
(4)Lj+1 = / ,
= (I) ()IL +1 J
Lr = Iv + 1 .
Set K= K + 1; return to step 2.
Step 4 If PHASE = 1, go to step 4(a). Otherwise, the optimum design has been found: end.
Step 4(a) If d= 0 and PM 1 < 0, no basic feasible solution exists: end. Otherwise, set PHASE = 2, M' = M1 — 1, eliminate the last row of Bi c, BK2 , 1311 and PK . Set K = K + 1; return to step 2. This completes the algorithm. It should be noted that, in practice, tolerances must be defined
to enable convergence to be established, and also to decide the acceptability of a basic feasible solution. These quantities are best found by experiment for a particular problem, as is the usual practice with optimisation algorithms.
3.2. Properties of the optimum structure
It has been established that the maximum number of nonzero values of 71 is equal to the num-ber of equality constraints, i.e. the number of degrees of freedom of the structure. It follows that the total number of layers NL is not greater than M.
If we consider a single element in the optimum structure, it is clear that if the loads and deflec-tions at its nodes are held constant, then it can be considered in isolation. These, however, are exactly the conditions imposed in problem 1; it follows that the single element is itself optimum in the same sense as the overall structure. The maximum number of layers in any single element is therefore equal to the number of its own degrees of freedom. Thus, for a three-node triangular element with three deformation modes, the maximum possible number of layers is three, and for a six-node triangle, nine.
Further information can be gained by a closer study of the form of the general column of, say, the i-th finite 'element as it appears in the final tableau. From (11) the general form of the reduced cost function, (c' ,)1(01 ) is
)1 = ao + a l cos 40i + a2 sin 401 , (13a)
and the column itself appears as
bi = (b0 )1 + (b d i cos 40i + (b2 )1 sin 40 i . (13b)
144 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
Now, if particular columns associated with 19 appear in the basis, i.e. if there are a number of layers in element i in the optimum solution, then as O' takes on the values corresponding to these columns, bi must generate a series of unit vectors, and (c'w )1 must take on zero values. Since, at the solution, ); is everwhere nonnegative, it follows that it must have a minimum of zero at all the values of 0' corresponding to layers in the i-th element. Thus, only two cases can arise
(i) at and a2 not both zero. Then (c;di has only one minimum, so that the i-th element has only one layer in the optimum structure.
(ii) a l and a2 both zero. Then the limit on the maximum number of layers in the i-th element is that set in the second paragraph above, i.e. is equal to the number of deformation modes assignable to the element.
4. Numerical results
The algorithm described above has been programmed for a digital computer and has been applied to several fairly simple plate problems. The matrices klo , k2 for a given structure were generated separately and stored in a disc file; thus, for subsequent optimisation runs, the initial tableau could be set up simply by multiplying these fixed matrices by the deflection vector appropriate to the problem and by introducing the load vector into the appropriate column. The program was there-fore substantially independent of the type of idealisation used to represent the plate.
This section will describe the results of runs on a representative problem, the plate shown in fig. 3. This consisted of a 45°-90°-45° triangle, idealised into 16 three-node triangular elements
Fig. 3. Numbering system. Degrees of freedom at i-th node — horizontal: 2i — I, vertical 2i.
of similar form. The total number of degrees was thus 30. The plate was fixed along its horizontal edge and carried a concentrated horizontal load at the vertex; the number of degrees of freedom was reduced to 20. The material had a material stiffness matrix of the following value:
McKeown, Algorithm for optimising fibre-reinforced structures 145
t
Fig. 4. Loading system. All subsidiary loads: 0.0001 kip.
Fig. 6. Case 2: final layup (for thicknesses see table 7). All double layers averaged. Triple layers shown isotropic (shaded).
Fig. 5. Case 1: initial layup (unit thickness).
30.0 1.0 0 -
K = 106 1.0 3.5 0 psi.
0 0 1.0_
In order to ensure that basic feasible solutions existed for the load-deflection sets chosen for the tests, the deflections were generated by arbitrarily assigning angles and thicknesses to the elements of the structure. In fact, each element was always assigned a single layer of unit thickness, the angles chosen depending on the actual test run. It was thus known that a basic feasible solution existed of volume 0.5 units. Two tests were made, the first using a uniform angle of 7/4 radians for all elements, the second using 0 radians. The program was then run using the deflections generated in each case. Tables 7 and 8 show the initial and final designs, and the weights associated.
146 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
Table 7
Element no. Initial design, volume = 0.500 in3 Final design, volume = 0.329 in3
layers No. of Angles No. of Thicknesses (radians) layers
It should be stated that the "initial" designs only qualify for the name because they were the designs used to generate the deflections; the algorithm does not require any initial guess at the solution since it generates its own feasible starting design.
The first point of interest is the reduction in volume between the initial and final design in both cases; it shows the remarkably wide range of designs having precisely the same deflections under the given load. (In the early stages of testing it was usual to recompute the deflections for the final design. These were never found to differ from the initial deflections by any significant amount: the worst case recorded showed a difference in the fifth significant figure for one com-ponent.) The actual layouts in both cases differed considerably from the simple initial designs. As predicted, the total number of layers in each case was 20, and their distributions showed the characteristics that might be expected from the discussion of section 3.3. Thus, some elements had double layers which were clearly "struggling" to become single layers: element 13 in table 7 is a case in point, where the true solution is evidently a single layer with an angle somewhere be-tween 0.64 and 0.66 radians. Both final designs in fact consisted mainly of single and quasi-single layers. The occurrence of the quasi-single layers is probably made inevitable by the fact that, if
J.J. McKeown, Algorithm for optimising fibre-reinforced structures 147
Table 8
Element Initial design, volume =0.500 in3 Final design, volume =0.326 in3no.
No. of AnglesThicknesses
No. of AnglesThicknesseslayers (radians) layers (radians)
1 0.0 1.0 1 1.376 0.0022 03 1 1.343 1.4864 0
5 2 { 1.240 0.2381.252 0.031
6 07 1 0.113 0.742
8Note: 0.0 rads
2 1. 1.564 0.112equivalent to 1.570 rads 1.554 0.818
9 (orthotropic material). 0
10 2 {1.350 0.1401.359 0.047
11 2 {1.560 1.4771.555 1.575
12 1.499 0.002
13 2 { 1.568 0.09261.565 1.034
14 2 0.Ql7 0.719t 0.020 0.132
15 2 {0.028 0.4570.021 0.410
16 0.0 1.0 2 {D.Oll 0.1101.569 0.889
Case 2: Deflections: {O.O, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,0.0,0.0,0.0,624.1607, -227. 0305, 618.7690,49.71815,614.0675,40.75571,598.0281,22.86017, 1555.504, 80.09939, 1580.643, 107.3689, 1591.514, -423.983, 3364.558, -571.9622,3325.806,179.3265,8115.847, -574.1343} X 10-6 in.
t-/t..f-
/ -f-
//
/
/ // 1/
/ /
/ 1//I 1/ 1/ V
/I / //1 I 1/
Fig. 7. Case 2: initial layup (unit thickness). Fig. 8. Case 2: Final layup (for thicknesses see table 8). Alldouble layers averaged.
148 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
Table 9 Table 10
Phase 1 Phase 1
Iteration Iteration
1 0.1018 X 104 1 0.1017 X 104 10 0.1013 X 104 10 0.1008 X 104 20 0.0996 x 104 20 0.1005 X 104 28 0.0197 X 104 30 0.1004 X 104 30 0.423 X 10-4 40 0.1001 x 104 32 -0.947 x 10-4 50 0.0998 X 104
each of the 16 elements had exactly one layer, this would have to be expressed either as a singular B matrix with multiple layers of identical angle, or a degenerate case with 4 extra layers of arbi-trary angle and zero thickness appearing in the tableau. Both of these cases might cause difficulty in final convergence. It is interesting that, where genuine multiple layers occurred, i.e. layers with distinct angles within one element, each consisted of groups of 3 — e.g. element 15 of case 1. The argument of section 3.3 showed that the maximum number of layers that could occur in such elements is in fact 3 for 3-node traingular elements.
It has already been pointed out that, in generalising the simplex algorithm in the way proposed in this paper, the finite convergence property is forfeited. The question of convergence rate thus becomes of interest. Tables 9 and 10 show how the sum of the special variables c5 and the actual volume W varied as the iteration progressed. The CPU time required was 20 seconds in the first case, and 30 in the second, on a D.E.C. PDP-10 computer in time-sharing mode; this compares with a time of about 5 seconds to read the stiffness data from disc, form the stiffness matrix and invert it. The phase 1 sections of tables 9 and 10 both exhibit a characteristic feature of the algorithm, namely an initial period of slow reduction in cS , followed by a sudden break or series of breaks; this is particularly marked in the second case. Unlike the truss example, both plate designs showed a marked decrease in plate volume between the beginning and end of phase 2; in both cases progress in this phase was smooth. The algorithm terminated when no (c;), existed with a minimum value less than —0.00001.
Summarising, these results show that the problem of layout optimising for fixed deflection structure of this type is not a difficult one when approached in the way described above; the
J.J. McKeown, Algorithm for optimising fibre•reinforced structures 149
number of iterations required was about 3.5 X M in the first case and 7.0 X M in the second. Con-siderable extra experience has in fact been gained, in particular with the geometry used for this test but with a wide range of deflection vectors. In most cases, the deflections used have been arbitrary in the sense that, unlike the deflections used in the tests described above, they were not generated by actual structures to begin with. These results tend to confirm the figures quoted above for the efficiency of the algorithm; in fact, the lower of the two figures is probably the more representative. When it is remembered that M iterations, similar to those involved in the optimisation algorithm, are necessary simply to analyse the structure, it can be seen that a low proce is being paid for the results obtained.
Before concluding this section, it is worth commenting on the form of the optimum structure generated in the two test cases. These show no great smoothness or continuity in their layout, while strict analogy with the truss example might have led one to expect a Michell-like structure. However, it must be stressed that, for this to occur, the deflections which form the constraints on the problem must be appropriately chosen, and this is a point which will be explored a little more fully in a later section.
5. Extensions of the algorithm
5.1. Stress constraints
The simple problem defined by eqs. 1 is easily extended to include limits on stress constraints; indeed, the algorithm as such is not extended at all, although the one-dimensional minimisations involved become constrained. The strain on a typical element is
E= a V ,
where a is an interpolation matrix (cf. (2b)). The stress is (using (3))
a= QE= (No a+ x i a cos 40 + K 2 at sin 0) V .
Since V is given, we can express the stress in any layer of the element i as
ai = cos40i +a l2 sin 40i ,
where cr io = K o ctV may be a function of position x only, and similarly fora i anda2. If the stress is to be constrained so that, say, the following criterion is satisfied:
(a i)t Sai <1 ,
where S is a square matrix of strength factors, then this fact is taken into account on each iteration by evaluating the minima of (c'01 as
150 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
Min (c:di (0') el
subject to
Max [cr io(x) + aii(x) cos 401 +4712(x) sin 401 Skr10(x) +a 11 (X) cos 401 + a2(x) sin 401 < 1 , xeXi
where X' is the space occupied by the i-th finite element, and Vis the allowable range for 01 —in our case usually (0, 7/2).
Clearly, this complicates the problem somewhat; but the exact nature of the imbedded one-dimensional minimisation applied to the (c:,), or (cs'); is not visible to the overall algorithm. Note, however, that the stress constraints must not directly involve the dimensions Ti.
5.2. Multiple alternative load cases
So far the discussion has been limited to the consideration of single load cases. However, the problem is not fundamentally changed by the addition of alternative load cases. In this case, there will be a deflection vector 1,/ corrrsponding to each of the additional load cases, and the constraint set (1 b) becomes
KV1 = , KV 2 = P2 , KVQ PQ
(14)
The matrix B is clearly modified by the addition of M rows for each load set. The deflections VQ cannot be chosen independently, since, by the virtual work theorem,
(Pl )t = (V i )t PI , = 1, 2 ... Q , = 1, 2,... Q . (15)
Eqs. (15) can of course be derived directly from (14) by virtue of the symmetry of K; they can be used to reduce the M X Q eqs. (14) to M + (M — 1) +... (M — Q +.1). Put another way, eqs. (14) can be seen to be equations for determining the M(M + 1)/2 independent elements of K. Hence, not more than Al such constraints can be satisfied simultaneously by independent vectors V', and in that case the actual number of independent equality constraints implied by (14) is M(M + 1)/2. When Q < M, the number of constraints is MQ Q(Q — 1)/2, and this is the maximum number of elements in the optimum structure. The limits for the individual elements are derived from this by replacing M by the number of degrees of freedom of such elements, as for the single load-set case.
The modification to the actual algorithm will be fairly clear.
5.3. Nonisotropic layouts
The description of the algorithm has considered only orthotropic arrangements of fibres. How-ever, no such restriction is necessary. As the Appendix shows in the general anisotropic case the material stiffness matrix has a variation with fibre angle which involves 5 terms; the result is that
J.J. McKeown, Algorithm for optimising fibre-reinforced structures 151
in the general column there would be 5 rather than 3 components. Additionally, the one-dimension-al minimisations are more difficult, involving effectively quartic rather than quadratic functions, but the overall change to the algorithm is self-evident.
6. Applications
The fixed-deflection problem is clearly a very restricted one, even though the layouts corre-sponding to a given deflection are also optimal for any scalar multiple of that deflection. The algorithm described in this paper was in fact developed as part of a technique for solving problems with inequality constraints on deflections. The aim was to provide a means for solving such prob-lems using deflections rather than fibre angles and thicknesses as the optimisation variables. The method is as follows. Consider a design, having weight W, which is optimal under the fixed-deflec-tion constraint 8. If 6 is now regarded as a variable, we can regard W(8) as a function defined in 8 — space. If 6* is the deflection vector associated with a design which is optimal under inequality constraints, then the weight of such a design is clearly W(6*). We can therefore seek such designs by minimising W(6) subject to the inequality constraints on 6.
Therefore, although it is hoped that the QLP algorithm is of interest in itself, it was in fact designed as a function-evaluation technique for a much larger class of problems, the detailed dis-cussion of which is outside the scope of this paper. This is the point of some remarks made above about the appropriate choice of deflection.
The function W(6) has some interesting properties. For example, although it is not defined analytically, but only as the solution to a minimisation problem, it nevertheless turns out that close approximations to its partial derivatives can usually be very easily and cheaply computed. This is of course a most useful property in the optimisation context. Again, the nature of W(8) implies that, associated with each vector 6, there is a vector of dual variables. This vector has the character of a virtual deflection set, and has proved useful in the development of algorithms for minimising W(8). Finally, it can be said- that the use of the quasi linear programming algorithm in association with an algorithm for minimising W(8) has already produced good results for the problem of designing structures of maximum stiffness.
Appendix. Variation in moduli with fibre angle
Tsai and Pagano (quoted by Hadcock [4] ) give the following relation between the stresses and strains in a uniaxial fibre-reinforced plastic in terms of the moduli referred to longitudinal and transverse axes:
ax
a y
(7 xy
=
_
Q11
Q21
Q61
Q12
Q22
Q62
Q16
Q26
Q66 —
Ex
e Y
e xy
152 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
6 Y ' EY
Longitudinal axis, Ell T., 6 E. x7 , x.y
Fig. A.
(using the indexing system given by Hadcock), where
while v12 is the major Poisson ratio (transverse to longitudinal strain under longitudinal stress) and v21 the minor Poisson ratio. If the Q matrix is broken up, it can be written as
J.J. McKeown, Algorithm for optimising fibre-reinforced structures 153
Q = K o + K i cos 40 + K2 sin 40 + K 3 cos 20 + K4 sin 20 , (Al )
where
K 0 =
3 Ui + U2
U1 — U2
0
U1 - U2
3U1 + U2
0
0
0
Ui + U2
K 1 =
U4
—U4
0
- U4
U4
0
0 -
0
— U4 _j
0 0 U4 ^ U3 0 0 0 0 2 U3
K 2 = 0 0 -U4 , K3 = 0 -U3 0 , K4 = 0 0 2 U3
U4 -U4 0 0 0 0 _1 U3 2U3 0
Consider now the effect of combining a layer with angle 0 and another with angle 0 + 7r/2. For compatibility, the strain s must be the same in each layer, under a stress a = (t1 Qi+ t2 a2 )/(t, + t2 ). Thus
CI 1 = K 1 Cf2 = K2 E 5 and a = (t 1 K 1 t2 K2) /(t1 t2)
If tl = t2 , we obtain the material stiffness matrix of the combined layer as
Q = 1(K 1 + 1c 2 ) .
Since, from (Al ), the stiffness matrices of the two layers are
K1 = K0 + K1 cos 40 + K 2 sin 40 + K 3 cos 20 + tc4 sin 20 ,
K2 = K O + K1 cos 40 + K 2 sin 40 — K 3 cos 20 — K 4 sin 20 ,
it follows that
Q = tc 0 + K cos 40 + K 2 sin 40 ,
and this is expression (3). Orthotropic layers were used in the algorithm described in this paper for several reasons. One
was the need to keep the algorithm as simple as possible while its feasibility was being stablished. Moreover, the fixed-stiffness problem is seen as a subproblem in a project whose overall aim is to produce a much wider class of optimal structures (see section 6), some of which (Michell-like structures) will probably be characterised by orthogonality of layup.
154 J.J. McKeown, Algorithm for optimising fibre-reinforced structures
Finally, the assumptions of the analysis require that the layup be symmetric about the midplane of the composite; it is assumed that layers are available in such a range of thicknesses that this is always possible.
Acknowledgement
The work described in this paper was done as part of an external Ph.D. project in association with the Department of Aeronautics, Imperial College. I would like to thank my supervisor, Mr. Frank Matthews, for his help and advice. I als.o owe a debt of thanks in many ways to all my colleagues at the Numerical Optimisation Centre.
References
[1] G.G. Pope and L.A. Schmidt (eds.), Structural design application of mathematical programming techniques, NATO AGARD-AG-149 (1971).
[2] I.C. Taig and R.I. Kerr, Optimisation in aircraft structures. Proceedings of Symposium on Optimisation in Aircraft Design, R.Ae.Soc. 1972.
[3] R.A. Gellatly and L. Berke, Optimum Structural Design, U.S.A.F. Report AFFDL-TR-70-165 (1971). [4] G. Lubin (ed.), Handbook of fibreglass and advances plastics composites (Van Nostrand Reinbold, 1969). [5] G.B. Dantzig, Linear programming and extensions (Princeton University Press, 1963).
PAC E
3 T L. •(row, b 0-tr4h, : . b it-?)-tt • .
6 .a-c.r,,A, Zvi 6.etv, bo-itiv„ . . . paZjal .
// PeeArLi I . 4 PaDA.Liv-e tavtLfra-c
3 0) at 0, Kkli c4- • .
4 . 2 • / 3 ( : Gkitvid_ (9(.
1- • • C, o .7()-irkt . 6 . --u-c -La; nyw -- 5 cm C9
(16 1--k-4,4 S : . ii-..t , -1,■0-t
4 (3 3.--(.44 L A. tO'n" bo w, ,. , L S 1 -•■•.-4-- 1 L' / . 0-)

































































































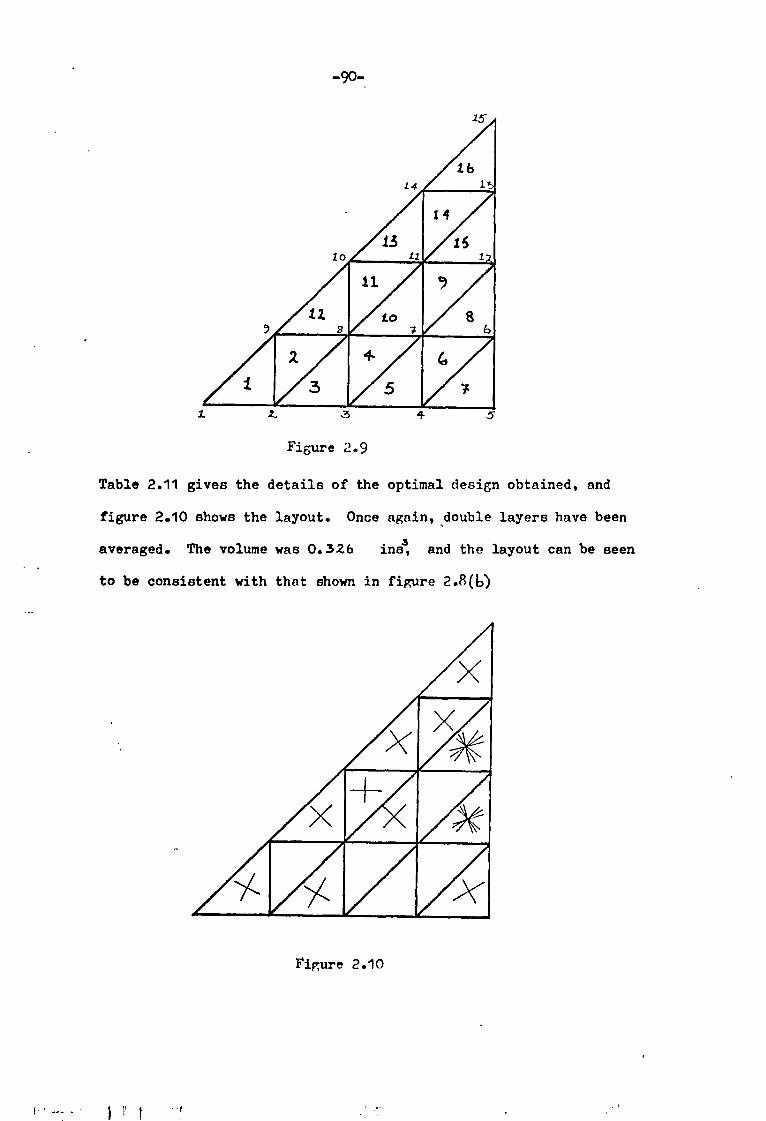











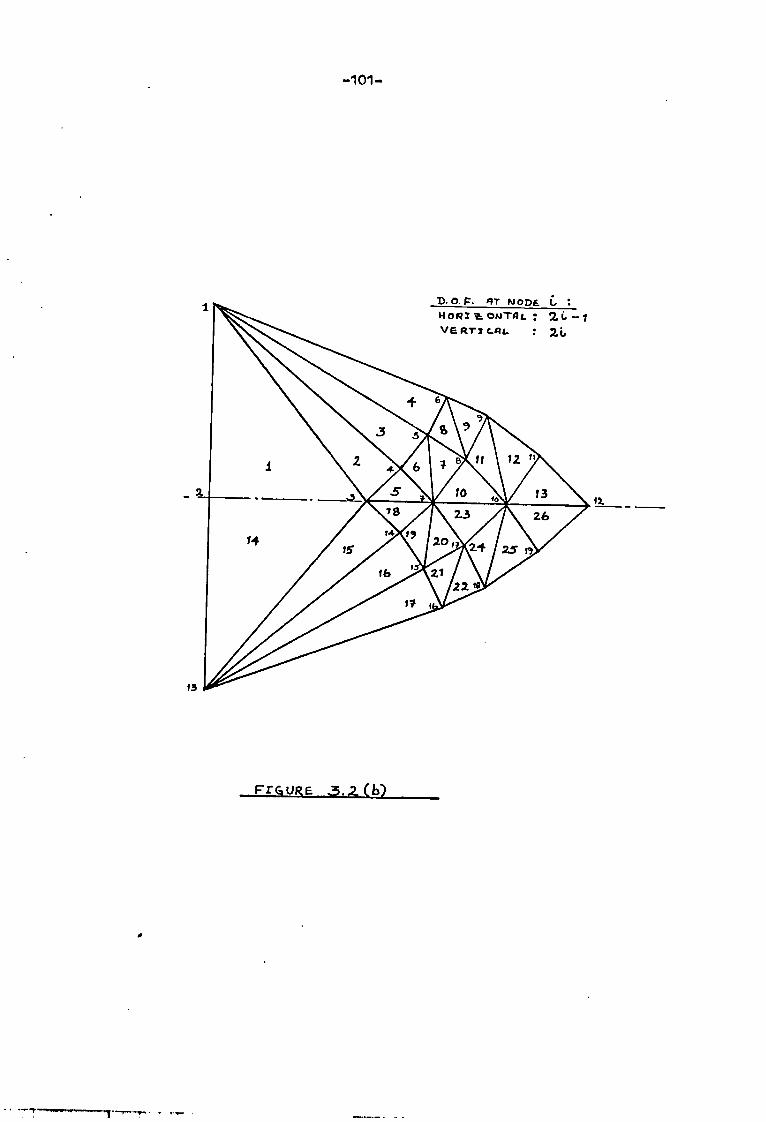













































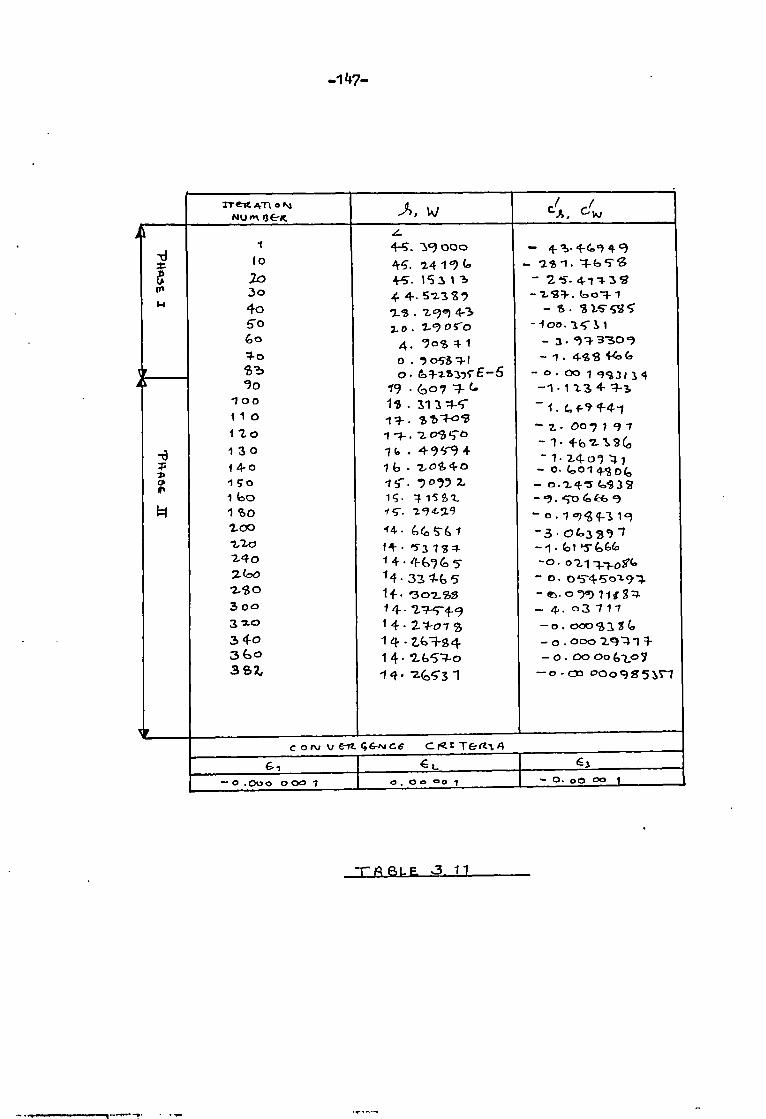











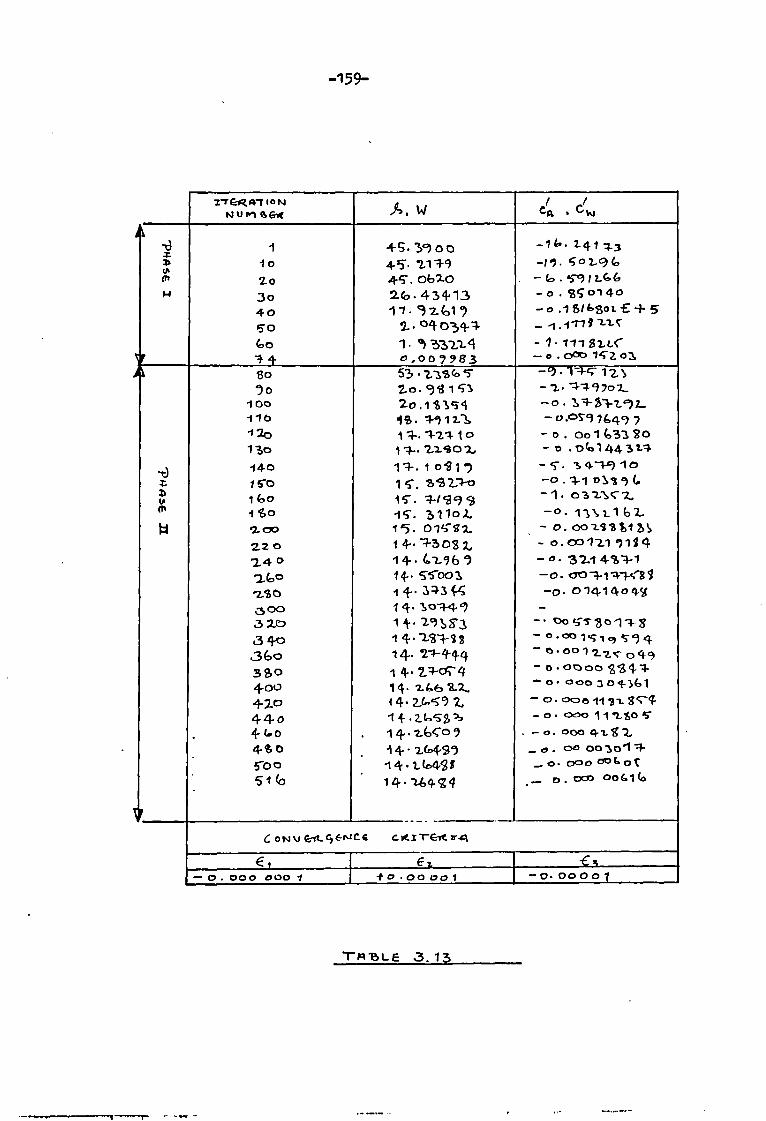

















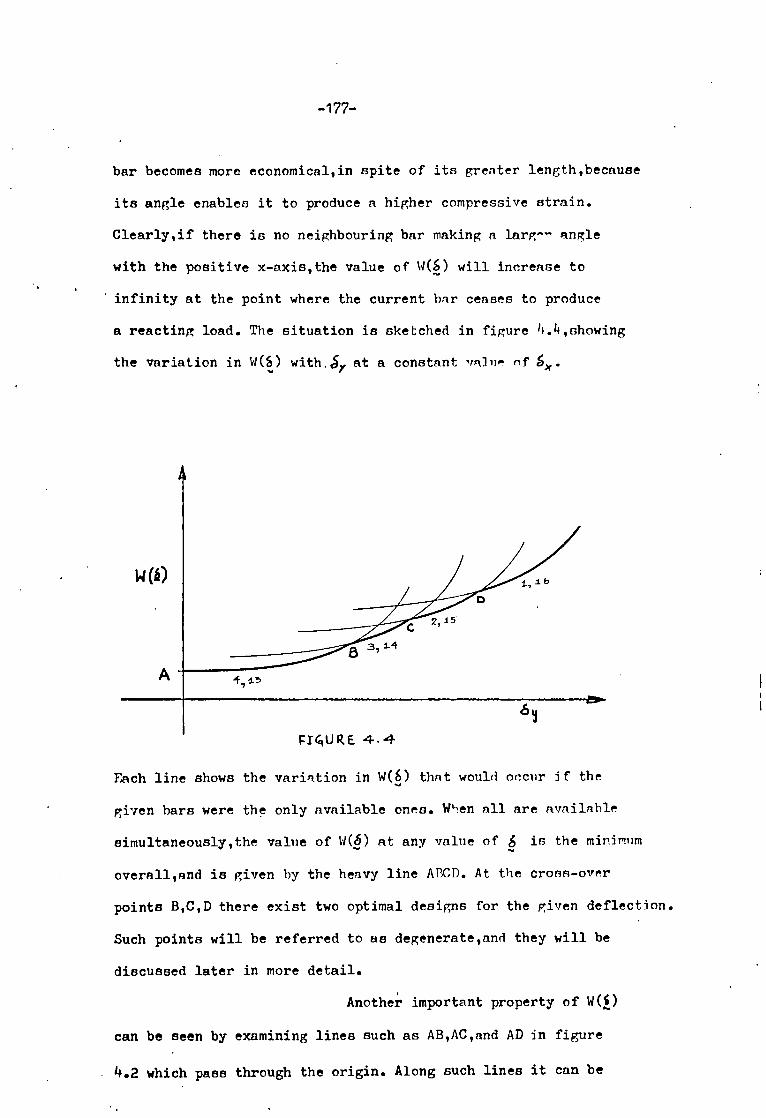























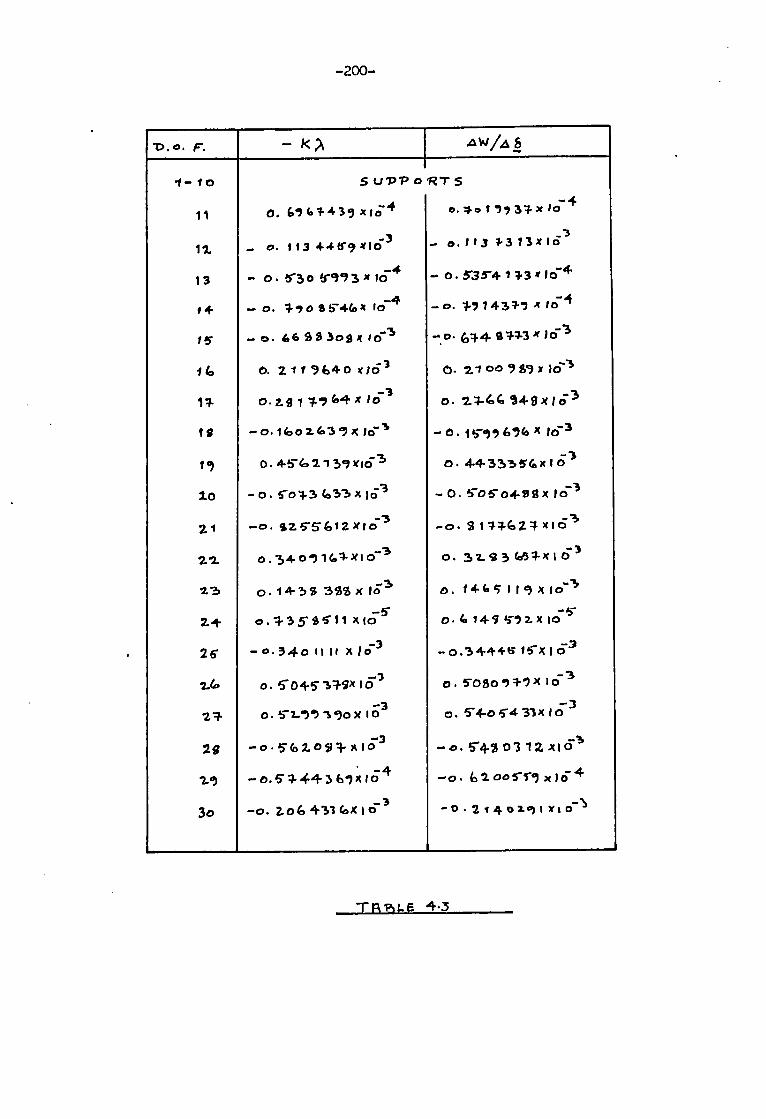























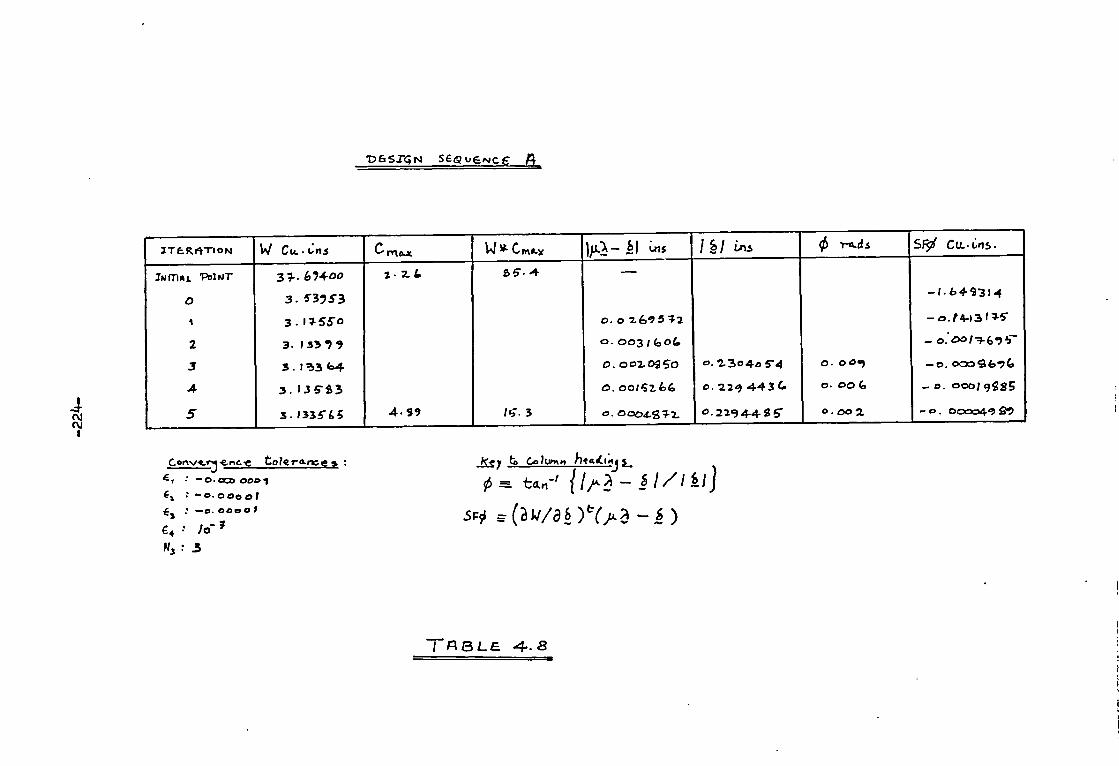






































































































































![Version 001: remember to check … AavI gyo ke Aa benno AaTma ko{ j¡dI Ôtno Ke.]I ivdehvasI ÒvHtSvamI ]I sImH\r SvamInuH smvsr` t=a k](https://static.documents.pub/doc/80x56/5acedb207f8b9ad24f8bbcc4/version-001-remember-to-check-aavi-gyo-ke-aa-benno-aatma-ko-jdi-tno-kei.jpg)





