42 CHAPTER 3 ANALYSIS OF LOAD FLOW PROBLEM USING GENETIC ALGORITHM 3.1 INTRODUCTION The trend, which appears in the development of modern transmission systems, is the more intensive utilization of existing networks. In addition to this, due to deregulation and reconstruction of the electric power industry, the need arises to transport large blocks of power between areas through defined corridors. Further more, the voltage profile of the remote buses of systems is necessary to be kept within a pre-specified range. Load flow is a solution for the static operating condition of an electric power system. Since the load flow equation is algebraic non-linear, many numerical methods have been developed for finding the desired normal solutions. It is used to determine (i) Equipment rating; (ii) Electrical Equipment Loading and system loses (iii) Bus voltage magnitude and angles and (iv) Reactive power support requirements to maintain voltages within limits for a given scenario and a contingency. All the above methods need an initial guess value to start. The random selection of initial value may cause the methods to miss the normal solution. Recently, there has been much interest in the application of stochastic search methods, such as genetic algorithm, to solve the power system problems. Genetic Algorithm is a computerized search and
Transcript
42
CHAPTER 3
ANALYSIS OF LOAD FLOW PROBLEM USING
GENETIC ALGORITHM
3.1 INTRODUCTION
The trend, which appears in the development of modern
transmission systems, is the more intensive utilization of existing networks.
In addition to this, due to deregulation and reconstruction of the electric
power industry, the need arises to transport large blocks of power between
areas through defined corridors. Further more, the voltage profile of the
remote buses of systems is necessary to be kept within a pre-specified range.
Load flow is a solution for the static operating condition of an electric power
system. Since the load flow equation is algebraic non-linear, many numerical
methods have been developed for finding the desired normal solutions.
It is used to determine (i) Equipment rating; (ii) Electrical
Equipment Loading and system loses (iii) Bus voltage magnitude and angles
and (iv) Reactive power support requirements to maintain voltages within
limits for a given scenario and a contingency. All the above methods need an
initial guess value to start. The random selection of initial value may cause the
methods to miss the normal solution.
Recently, there has been much interest in the application of
stochastic search methods, such as genetic algorithm, to solve the power
system problems. Genetic Algorithm is a computerized search and
43
optimization algorithm based on the mechanics of natural genetics and natural
selection. GA is very different from traditional search and optimization
methods used in engineering problems. Because of the simplicity, ease of
operation, minimum requirements and global perspective, GA’s have been
successfully used in a wide variety of problems. Genetic Algorithm is a part
of evolutionary computing, which is rapidly growing area of artificial
intelligence. GA and its modified versions have been popular because of
solving highly nonlinear optimization problems.
3.2 GENETIC ALGORITHM
Genetic Algorithm was first proposed by Holland in the early 1970s
and put into practical applications in the late 1980s. In power systems, GA
has been applied for optimization of generation expansion planning, economic
dispatch unit commitment and a reactive power planning. GAs are random
search optimization algorithm based on the mechanics of natural selection and
genetics (Sheble et al 1995). The objective of GA is to find the optimal
solution to a problem. Since GAs have heuristic procedures, they are not
guaranteed to find the optimum, but experience has shown that they are able
to find very good solutions for a wide range of problems. They operate on
string structures, typically a concatenated list of binary digits representing a
coding of the parameters for a given problem. GAs differ from more
traditional optimization techniques in four important ways (Sudhakaran et al
2004, Lai et al 1997). They are
a) GAs use objective function information to guide the search,
not derivative or other auxiliary information.
b) GAs use a coding of the parameters used to calculate the
objective function in guiding the search, not the parameter
themselves.
44
c) GAs search through many points in the solution space at one
time, not a single point.
d) GAs use probabilistic rules, not deterministic rules, in moving
from one set of solutions to the next.
Reproduction or selection, crossover and mutation are the three
important GA operators (Lai et al 1997). Parent selection is a process where
two chromosomes are selected from the parent population based on their
fitness value. Solutions with high fitness values have a high probability of
contributing new offspring to the next generation (Maifeld et al 1996). The
function of crossover is the creation of new individuals, out of two individuals
of the current population (Sudhakaran et al 2004). Mutation is the operator
responsible for the injection of new information. With a small probability,
random bits of the offspring chromosomes flip from 0 to 1 and vice versa and
give the new characteristic that do not exist in the parent population (Bakirtzis
et al 2002). The flow chart for the simple GA is given in the Appendix 1 in
Figure A1.2.
It is widely recognized that the Simple Genetic Algorithm (SGA)
scheme is capable of locating the neighborhood of the optimal or near optimal
solutions, but in general, requires a large number of generations to converge.
This problem becomes more intense for large-scale optimization problems
with difficult search spaces and lengthy chromosomes, where the possibility
for the SGA to get trapped in local optima increases and convergence speed
of the SGA decreases. At this point, a suitable combination of the basic and
advanced genetic operators must be introduced in order to enhance the
performance of the SGA.
45
3.3 ANALYSIS OF LOAD FLOW PROBLEM USING FAST
SEARCH GENETIC ALGORITHM
3.3.1 Introduction
In this research work, Fast Search Genetic Algorithm is used to find
the solution of load flow problem. FSGA overcomes the drawbacks of
conventional methods. It involves the simple genetic operators and the
advanced features like fitness scaling, elitism and hill climbing. This will
explore the problem search space and gives the better solution. Hill climbing
operator will increase the speed of convergence. Test results on Ward Hale
Six Bus system demonstrate the improvement achieved with the aid of
advanced operators.
3.3.2 Fast Search Genetic Algorithm (FSGA)
In this thesis, Fast Search Genetic Algorithm is used to solve the
load flow problem because of its simplicity and global or near global solution
to the problem. The objective function is to minimize the summation of
square of the change in real and reactive power and change in voltage (for PV
bus only).
One of the most important issues in the genetic evolution is the
effective rearrangement of the genotype information. In the SGA, crossover is
the main genetic operator responsible for the exploitation of information
while mutation brings new nonexistent bit structures. It is widely recognized
that the SGA scheme is capable of locating the neighborhood of the optimal
or near optimal solutions, but in general, requires a large number of
generations to converge. This problem becomes more intense for large-scale
optimization problems with difficult search spaces and lengthy chromosomes.
At this point, a suitable combination of the basic and advanced genetic
46
operators must be introduced in order to enhance the performance of the
SGA. Advanced genetic operators usually combine local search techniques
and expertise derived from the nature of the problem.
A set of advanced genetic operators have been added to the SGA in
order to increase its convergence speed and improve the quality of solution.
Our interest was focused on constructing simple yet powerful enhanced
genetic operators that effectively explore the problem search space. The
advanced features included in our GA implementation are
3.3.2.1 Fitness Scaling
In order to avoid early domination of extraordinary strings and to
encourage a healthy competition among equals, a scaling of the fitness of the
population is necessary. In our approach, the fitness is scaled by a linear
transformation.
3.3.2.2 Elitism
Elitism ensures that the best solution found thus far is never lost
when moving from one generation to another. The best solution of each
generation replaces a randomly selected chromosome in new generation.
3.3.2.3 Hill Climbing
In order to increase the GA search speed at smooth areas of the
search space, a hill climbing operator is introduced, which perturbs a
randomly selected control variable. The modified chromosome is accepted if
there is an increase in Fitness Function (FF) value; otherwise, the old
47
chromosome remains unchanged. This operator is applied only to the best
chromosome (elite) of every generation (Bakirtzis et al 2002).
The main difference between SGA and the proposed FSGA is the
addition of advanced operators. The convergence criteria value is different for
SGA and FSGA. The algorithm for the proposed method is
Step1 : Initialize population and Evaluate population.
Step2 : Check the termination criteria. If the criterion is satisfied,
stop the process and print results otherwise go to next step.
Step3 : Apply roulette wheel selection, then apply single point
crossover and then apply mutation operator
Step4 : Apply elitism and hill climbing operator.
Step5 : Evaluate the population.
Step6 : Increment the generation and go to step2.
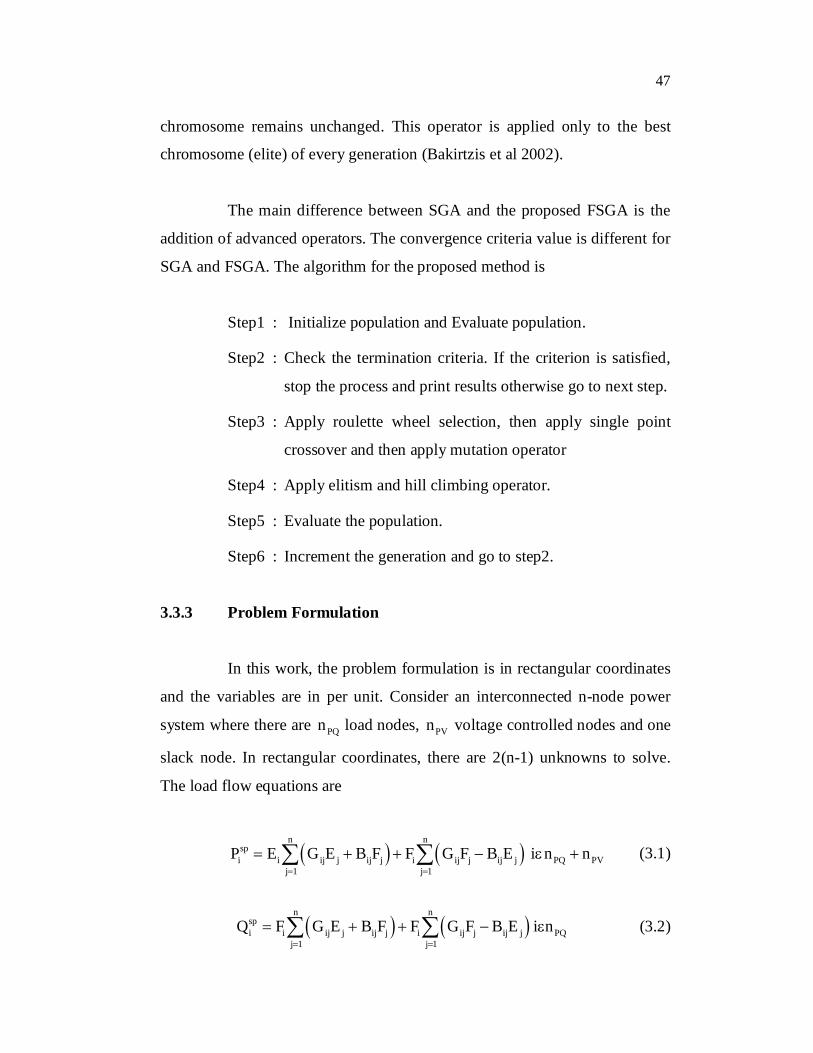
3.3.3 Problem Formulation
In this work, the problem formulation is in rectangular coordinates
and the variables are in per unit. Consider an interconnected n-node power
system where there are PQn load nodes, PVn voltage controlled nodes and one
slack node. In rectangular coordinates, there are 2(n-1) unknowns to solve.
The load flow equations are
n n
spi i ij j ij j i ij j ij j PQ PV
j 1 j 1
P E G E B F F G F B E i n n
(3.1)
n n
spi i ij j ij j i ij j ij j PQ
j 1 j 1
Q F G E B F F G F B E i n
(3.2)
48
and
2sp 2 2i i i PVV E F i n (3.3)
where i i iV E jF and ij ij ijY G jB
The objective function results from the summation of squares of the
power mismatch and the voltage mismatch whose minimum coincides with
the load flow solution (Youdong et al 1991).
PQ PV PQ PV
2 2 2i i i
i n n i n i nmin g E,F P Q V
(3.4)
Where
Power Mismatch Criteria:
n n
spi i i ij j ij j i ij j ij j PQ PV
j 1 j 1
P P E G E B F F G F B E i n n
(3.5)
n n
spi i i ij j ij j i ij j ij j PQ
j 1 j 1
Q Q F G E B F E G F B E i n
(3.6)
Voltage Mismatch Criteria:
1
sp 2 2 2i i i i PVV V E F i n (3.7)
The load flow objective function is to be minimized, g(E,F), is
transformed and normalized to a fitness scheme to be maximized and is given
by,
1f E,F
g E,F (3.8)
49
3.3.4 Genetic Algorithm Implementation
The application of GA for the solution of Load flow problem is
explained below. The proposed FSGA is tested on the Ward Hale Six bus
system (Pai 1984) including the half line charging admittance and off-nominal
turns ratio.
Step 1: Representation
Representation plays a key note in the development of GA problem
that can be solved once it can be represented in the form of a solution string
(Chromosomes). The bits (genes) in the chromosomes could be binary
numbers. In this thesis work, real part of the voltage (E) and imaginary part of
the voltage (F) are considered to be a variable for the solution of Load flow
problem except the slack bus. The variable E is represented by 5 bits and 4
bits are used to represent the variable F. There are ten variables to solve in
this problem. The length of the string is 45.
Step 2: Initialization
To begin, the initial population is in binary string which is
generated randomly. Then find the decimal value of the binary string from the
following Equation (3.9).
0 1 i chro len0 1 i chro lenvalue bit 2 bit 2 ........ bit 2 ........ bit 2
(3.9)
The decoding value of the variable is computed by the
Equation (3.10)
i i0
1 i chro len
value x max x minx x min
2 1
(3.10)
50
where
x1 is the decoder at real part of the voltage or imaginary part of the
voltage.
xi (min) is the Lower limit of the variable
xi (max) is the Upper limit of the variable
chro-len is the Total length of the string
value is the decimal value equivalent to the binary string.
In this thesis work, on the PQ nodes, the variables were specified in the
intervals (0.9, 1.0) for E and (-0.2, 0.2) for F. On the PV nodes, the variables
were specified in the intervals (0.9, 1.1) for E and (-0.3, 0.3) for F. The
population size is taken as 10.
Step 3: Calculation of fitness value
The fitness function for each variable is determined by finding the
value of objective function to that variable, which is given below:
Fitness function 1f E,F
g E,F
The fitness function is computed for every individual of the
population. In the maximization problem, the string which has higher fitness
value will be the best string.
Step 4: Selection or reproduction
Reproduction selects good strings in a population and forms a
mating pool. Reproduction operator is also called as selection operator. In this
work, Roulette wheel selection is used.
51
Step 5: Cross Over
Cross Over is a mechanism for diversification. The strings to be
crossed and the crossing points are selected randomly and crossover is done
with 0.8 cross over probability. A single point cross over is used in this work.
Step 6: Mutation
Mutation is a random modification of randomly selected string.
Mutation is done with a mutation probability of 0.01.
Step 7: Apply elitism and hill climbing operator, and then evaluate the
population
After completing an iteration of GA, the best value is stored. Then
the strings available at the end of first iteration will be treated as parent
chromosome for the second iteration. The work procedure is repeated until a
convergence criterion is satisfied.
3.3.5 Results and Discussion
The proposed FSGA is tested on the Ward Hale Six bus system
including the half line charging admittance and off-nominal turns ratio. The
data for 6 bus system are given in Appendix 1 in Table A1.1 and A1.2, and
the single line diagram of 6 bus system is given in Appendix 1 in Figure A1.4.
There are 10 variables to solve for the 6 bus system. The variables are Ei and
Fi except the slack bus. On the PQ nodes, the variables were specified in the
intervals [0.9, 1.0] for E and [-0.2, 0.2] for F. The variation of E and F on PV
nodes were constrained in the intervals [0.9, 1.1] and [-0.3, 0.3]. The problem
is solved first by simple genetic algorithm and then by proposed Fast Search
52
Genetic Algorithm. The parameters selected for the solution of above problem
is given in Table 3.1. Both algorithms are implemented using MATLAB
software on a Pentium-4 PC. The best results of four runs for SGA and for
Table 3.1 Parameter Values for SGA and FSGA
Parameters SGA FSGA
Length of the chromosome 45 45
Population size 10 10
Crossover probability 0.8 0.8
Mutation probability 0.01 0.01
Convergence criteria 0.7 0.5
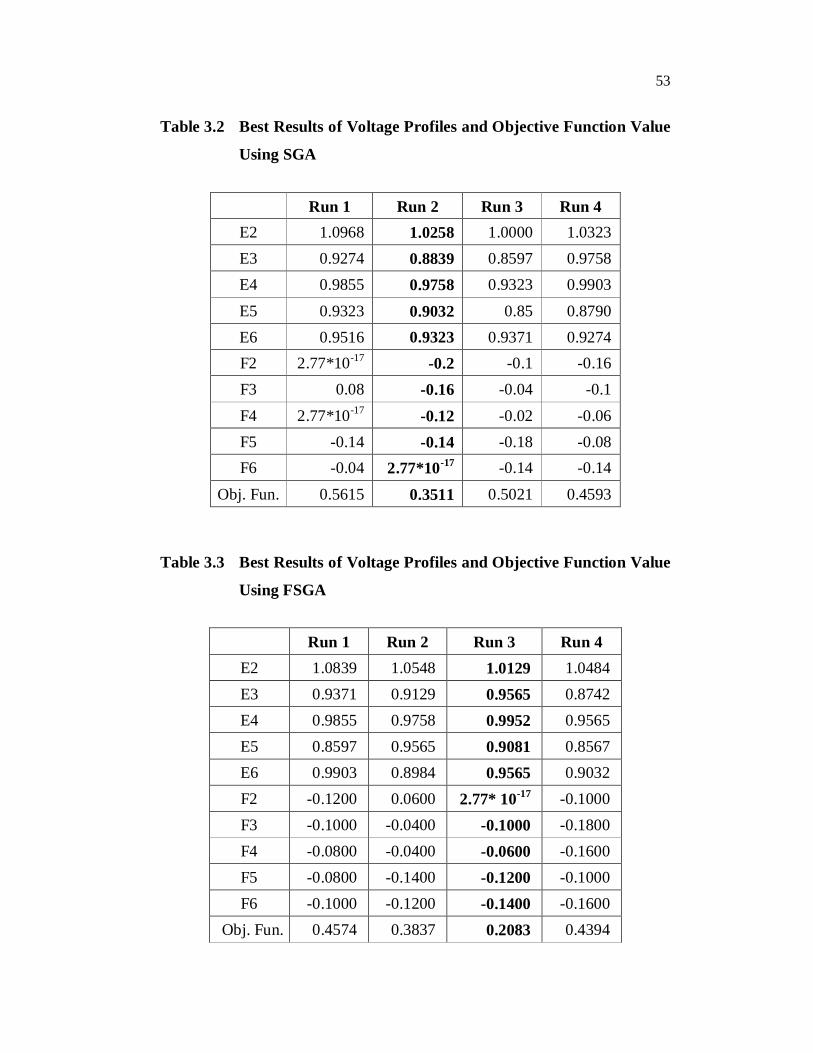
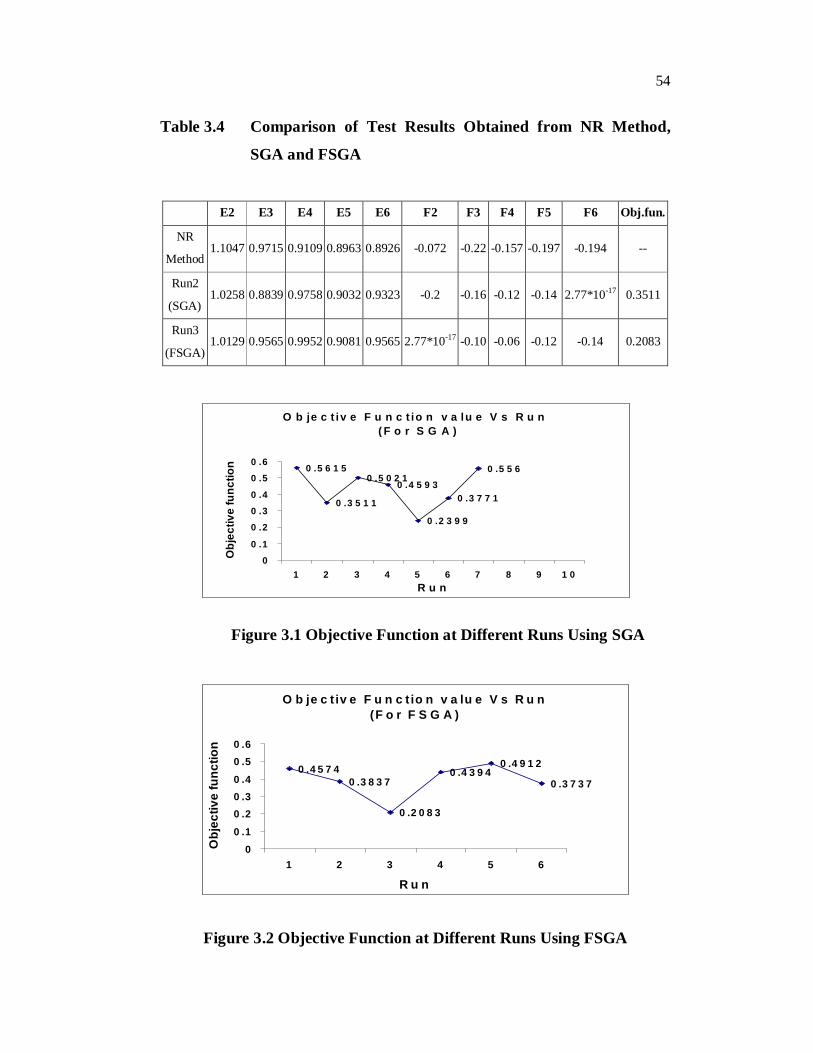
FSGA are tabulated in Tables 3.2 and 3.3 respectively. Results of Run2 from
Table 3.2 and results of Run3 from Table 3.3 are compared with NR method
and are given in Table 3.4. From the comparison of results it is proved that
the FSGA produce improvements in the real voltage profiles than the SGA
and NR method. Especially the FSGA can give near global optimum solution.
It is also verified that the number of generation required to satisfy
convergence criteria is only 33 for FSGA method and the computer
processing time is around 0.2 seconds. The number of generations to satisfy
the convergence criteria for SGA is 420 and the computer processing time is
around 4 seconds. The objective function value at different runs for SGA and
FSGA are shown in Figure 3.1 and Figure 3.2 respectively. Real voltage
profiles for SGA and FSGA is shown in Figure 3.3.
53
Table 3.2 Best Results of Voltage Profiles and Objective Function Value
The fitness proportional selection (e.g. Roulette-wheel selection) is
likely to lead to two problems, namely (Rajasekaran et al 2003).
1. Stagnation of search because it lacks selection pressure, and
2. Premature convergence of the search because it causes the
search to narrow down too quickly.
Unlike the Roulette-wheel selection, the tournament selection
strategy provides selective pressure by holding a tournament competition
among NU Individuals (Frequency of NU =2).The best individual (the winner)
from the tournament is the one with highest fitness Ф which is the winner of
NU. Tournament competitors and the winner are then inserted into the mating
pool. The tournament competition is repeated until the mating pool for
generating new offspring is filled. The mating pool comprising of tournament
winner has higher average population fitness. The fitness difference provides
the selection pressure, which drives GA to improve the fitness of succeeding
genes. The main difference between SGA and the proposed MGA is the
addition of improved operators.
The algorithm for the proposed method is
Step 1 : Initialize population.
Step2 : Check the termination criteria (generation no). If the
generation is greater than the maximum generation, stop
the process and print the results otherwise go to next step.
Step 3 : Evaluate fitness function
Step4 : Apply tournament selection, then apply two point
crossovers and then apply mutation operator.
60
Step 5 : Apply elitism operator.
Step 6 : Increment the generation and go to step2
3.4.3 Problem Formulation
In this work, the problem formulation is in rectangular coordinates
and the variables are in per unit. Consider an interconnected n-node power
system where there are npq load nodes, npv voltage controlled nodes and one
slack node. In rectangular coordinates, there are 2(n-1) unknowns to solve.
The load flow equations are
n n
spi i ij j ij j i ij j ij j
j=1 j=1
P =E G E +B F +F G F -B E PQ PViεn +n (3.11)
n n
spi i ij j ij j i ij j ij j
j 1 j 1Q F G E B F E G F B E
PQiεn (3.12)
and 2sp 2 2i i iV E F PViεn (3.13)
For Induction motor connected bus, the specified reactive power is
calculated by the Equation (3.14)
2
sp m moti 2 2
mot mot
V XQ(R ) (X )
(3.14)
where, i i iV =E +jF and ij ij ijY =G -jB
The objective function results from the summation of squares of the
power mismatch, the voltage mismatch and the real power loss whose
minimum coincides with the load flow solution.
61
PQ PV PQ PV
22 2 2i i i loss
i n n i n i n
min g E,F P Q V WP
(3.15)
where,
n n
spi i i ij j ij j i ij j ij j
j=1 j=1
ΔP =P -E G E +B F -F G F -B E PQ PVi n n (3.16)
n n
spi i i ij j ij j i ij j ij j
j=1 j=1
ΔQ =Q -F G E +B F +E G F -B E PQi n (3.17)
1
sp 2 2 2i i i iV V (E F ) PVi n (3.18)
and n n
loss ij i j i ji 1 j 1
P G (E E FF )
(3.19)
W is the Penalty factor
The load flow objective function to be minimized, g (E, F), is transformed and
normalized to a fitness scheme to be maximized and is given by the
Equation (3.20).
2loss
1f (E,F)1 g(E,F) WP
(3.20)
3.4.4 Genetic Algorithm Implementation
The application of GA for the solution of Load flow problem is
explained below. The proposed MGA is tested on the Ward Hale Six bus
system including the half line charging admittance and off-nominal turns ratio
and the nine bus system.
62
Step 1: Representation
Representation plays a key note in the development of GA problem
and can be solved once it can be represented in the form of a solution string
(Chromosomes). The bits (genes) in the chromosomes could be binary
numbers. In this thesis work, real part of the voltage (E) and imaginary part of
the voltage (F) are considered to be a variable for the solution of Load flow
problem. The variables are Ei and Fi except the slack bus. The variable E is
represented by 5 bits and 4 bits are used to represent the variable F. There are
ten variables to solve for 6 bus system and 16 variables to solve for 9 bus
system. The length of the string is 45 for 6 bus system and 72 for 9 bus
system.
Step 2: Initialization
To begin with, the initial population is in binary string which is
generated randomly. The size of the population is 30. Then find the decimal
value of the binary string from the following equation.
0 1 i chro len0 1 i chro lenvalue bit 2 bit 2 ........ bit 2 ........ bit 2
(3.21)
The decoding value of the variable is computed by the Equation (3.22)
i i0
1 i chro len
value x max x minx x min
2 1
(3.22)
where
x1 is the decoder at real part of the voltage or imaginary part of the
voltage.
xi (min) is the Lower limit of the variable
63
xi (max) is the Upper limit of the variable
chro-len is the Total length of the string
value is the decimal value equivalent to the binary string.
In this thesis work, on the PQ nodes, the variables were specified in
the intervals (0.9, 1.0) for E and (-0.2, 0.2) for F. The variation for E and F on
PV nodes were specified in the intervals (0.9, 1.1) and (-0.3, 0.3)
Step 3: Calculation of fitness value
The fitness function for each variable is determined by finding the
value of objective function to that variable, which is given below:
Fitness function 2loss
1f (E,F)1 g(E,F) WP
(3.23)
The fitness function is computed for every individual of the
population. In the maximation problem, the string which has higher fitness
value will be the best string.
Step 4: Selection or reproduction
Reproduction selects good strings in a population and forms a
mating pool. Reproduction operator is also called as selection operator. In this
work, tournament selection is used.
Step 5: Cross Over
Cross Over is a mechanism for diversification. The strings to be
crossed and the crossing points are selected randomly and crossover is done
64
with 0.8 cross over probability. A two point crossover is used for MGA and
single point crossover is used for SGA in this work.
Step 6: Mutation
Mutation is a random modification of randomly selected string.
Mutation is done with a mutation probability of 0.01.
Step 7: Apply elitism and then evaluate the population.
Complete an iteration of GA and the best value is stored. All the
strings available at the end of first iteration will be treated as parent for the
second iteration. The work procedure is repeated until maximum number of
generation is reached.
3.4.5 Results and Discussion
The proposed MGA is tested on Ward Hale Six bus system
including the half line charging admittance and off-nominal turns ratio and on
9 bus systems. The data for 6 bus are given in Appendix 1 in Table A1.1 and
A1.2 and the single line diagram of 6 bus system is given in Figure A1.4. The
data for 9 bus are given in Appendix 1 in Table A1.3 and A1.4. For the 6 bus
system, there are ten variables to solve and for the 9 bus system there are 16
variables to solve. The variables are Ei and Fi except the slack bus. On the PQ
nodes, the variables were specified in the intervals [0.9, 1.0] for E and [-0.2,
0.2] for F. On the PV nodes, the variables were specified in the intervals [0.9,
1.1] and [-0.3, 0.3]. The test problems were solved by simple Genetic
Algorithm and then by proposed Modified Genetic Algorithm with and
without real power loss, and with and without induction motor load. The
parameters selected for the solution of above problems are given in
65
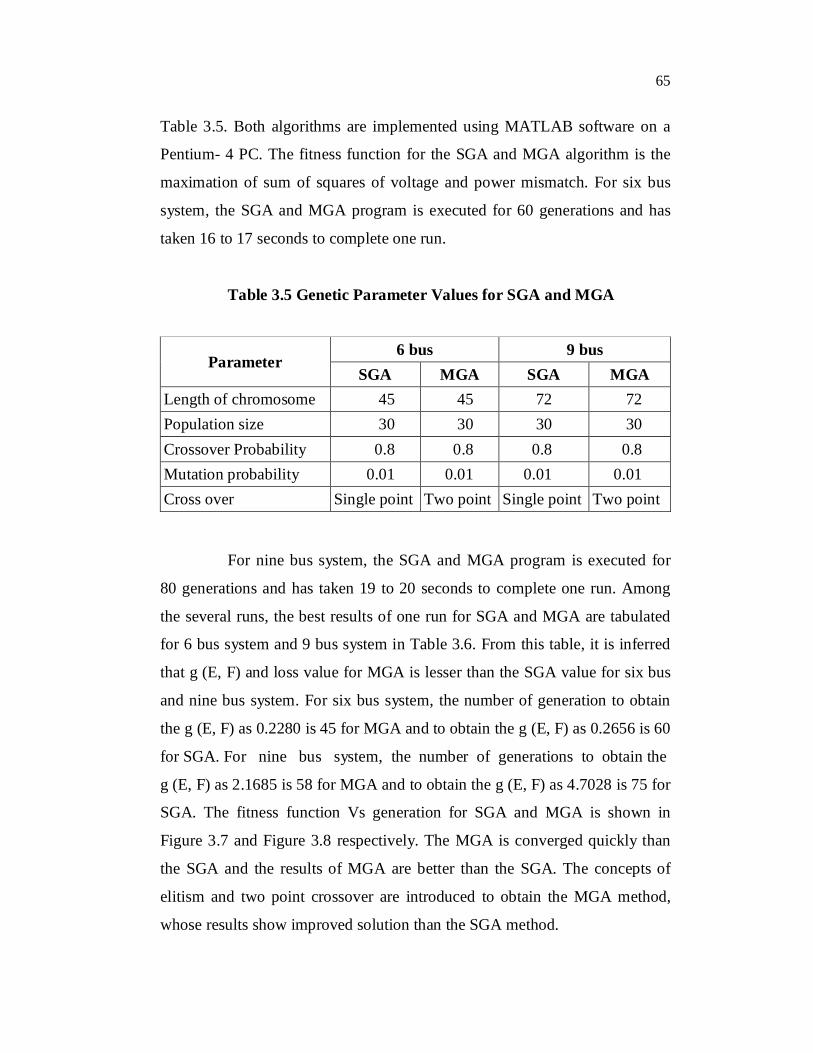
Table 3.5. Both algorithms are implemented using MATLAB software on a
Pentium- 4 PC. The fitness function for the SGA and MGA algorithm is the
maximation of sum of squares of voltage and power mismatch. For six bus
system, the SGA and MGA program is executed for 60 generations and has
taken 16 to 17 seconds to complete one run.
Table 3.5 Genetic Parameter Values for SGA and MGA
Parameter 6 bus 9 bus
SGA MGA SGA MGA Length of chromosome 45 45 72 72 Population size 30 30 30 30 Crossover Probability 0.8 0.8 0.8 0.8 Mutation probability 0.01 0.01 0.01 0.01 Cross over Single point Two point Single point Two point
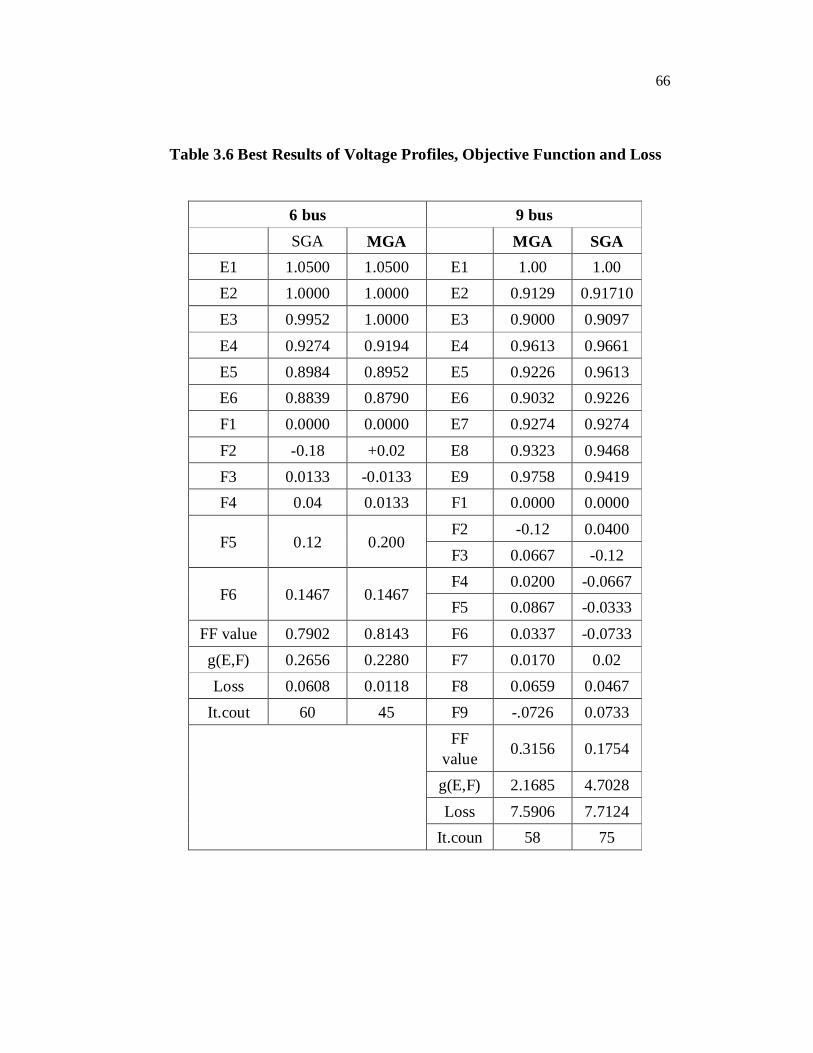
For nine bus system, the SGA and MGA program is executed for
80 generations and has taken 19 to 20 seconds to complete one run. Among
the several runs, the best results of one run for SGA and MGA are tabulated
for 6 bus system and 9 bus system in Table 3.6. From this table, it is inferred
that g (E, F) and loss value for MGA is lesser than the SGA value for six bus
and nine bus system. For six bus system, the number of generation to obtain
the g (E, F) as 0.2280 is 45 for MGA and to obtain the g (E, F) as 0.2656 is 60
for SGA. For nine bus system, the number of generations to obtain the
g (E, F) as 2.1685 is 58 for MGA and to obtain the g (E, F) as 4.7028 is 75 for
SGA. The fitness function Vs generation for SGA and MGA is shown in
Figure 3.7 and Figure 3.8 respectively. The MGA is converged quickly than
the SGA and the results of MGA are better than the SGA. The concepts of
elitism and two point crossover are introduced to obtain the MGA method,
whose results show improved solution than the SGA method.
66
Table 3.6 Best Results of Voltage Profiles, Objective Function and Loss