C 1 CINEMÁTICA C 1 CINEMÁTICA • Movimiento Mecánico. Bases para su Movimiento Mecánico. Bases para su estudio. estudio. • Métodos vectorial, de coordenadas y Métodos vectorial, de coordenadas y natural. natural. • Magnitudes cinemáticas. Magnitudes cinemáticas. • Movimiento unidimensional. Movimiento unidimensional. • Movimiento rectilíneo uniformemente Movimiento rectilíneo uniformemente variado. Movimiento rectilíneo uniforme. variado. Movimiento rectilíneo uniforme. • Caída libre Caída libre • Ejemplos Ejemplos Bibliog. Sears, Física Universitaria Bibliog. Sears, Física Universitaria
Transcript
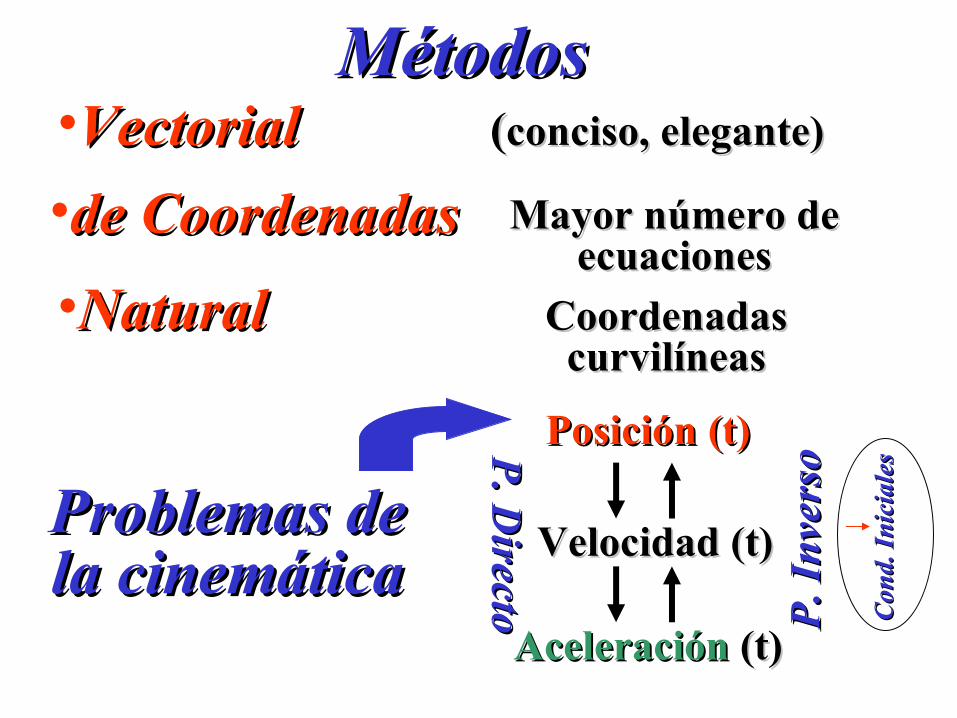
C 1 CINEMÁTICAC 1 CINEMÁTICA • Movimiento Mecánico. Bases para su Movimiento Mecánico. Bases para su estudio. estudio. • Métodos vectorial, de coordenadas y Métodos vectorial, de coordenadas y natural. natural. • Magnitudes cinemáticas.Magnitudes cinemáticas.• Movimiento unidimensional. Movimiento unidimensional.
Cinemática: Cinemática: Rama de laRama de la Mecánica Mecánica que se dedica a la descripción del que se dedica a la descripción del movimiento mecánico movimiento mecánico sin interesarse sin interesarse por las causaspor las causas que lo provocan. que lo provocan.
Dinámica: Dinámica: Rama de laRama de la Mecánica Mecánica que se dedica a que se dedica a investigar las causasinvestigar las causasque provocan el movimiento que provocan el movimiento mecánico. mecánico.
Movimiento Mecánico: Movimiento Mecánico: Cambio de Cambio de posición de posición de un cuerpoun cuerpo respecto respecto a otrosa otros, , tomados como referencia.tomados como referencia.
Carácter: Carácter: RelativoRelativo
Definir sistema Definir sistema bajo estudiobajo estudio
Definir Definir Sistema de Sistema de Referencia Referencia
(SR)(SR)
Bases para el estudio del Bases para el estudio del movimiento mecánicomovimiento mecánico
• Definición del Sistema de Referencia (Definición del Sistema de Referencia (SRSR))
• Utilización de Utilización de magnitudes físicasmagnitudes físicas apropiadas y apropiadas y relaciones entre ellas.relaciones entre ellas.
• Empleo de modelos para el sistema físico: Empleo de modelos para el sistema físico: Modelo de cuerpo rígidoModelo de cuerpo rígido y y Modelo de partículaModelo de partícula..
• Utilización del Utilización del principio de independenciaprincipio de independencia de de los movimientos de Galileo así como del los movimientos de Galileo así como del principio de superposiciónprincipio de superposición..
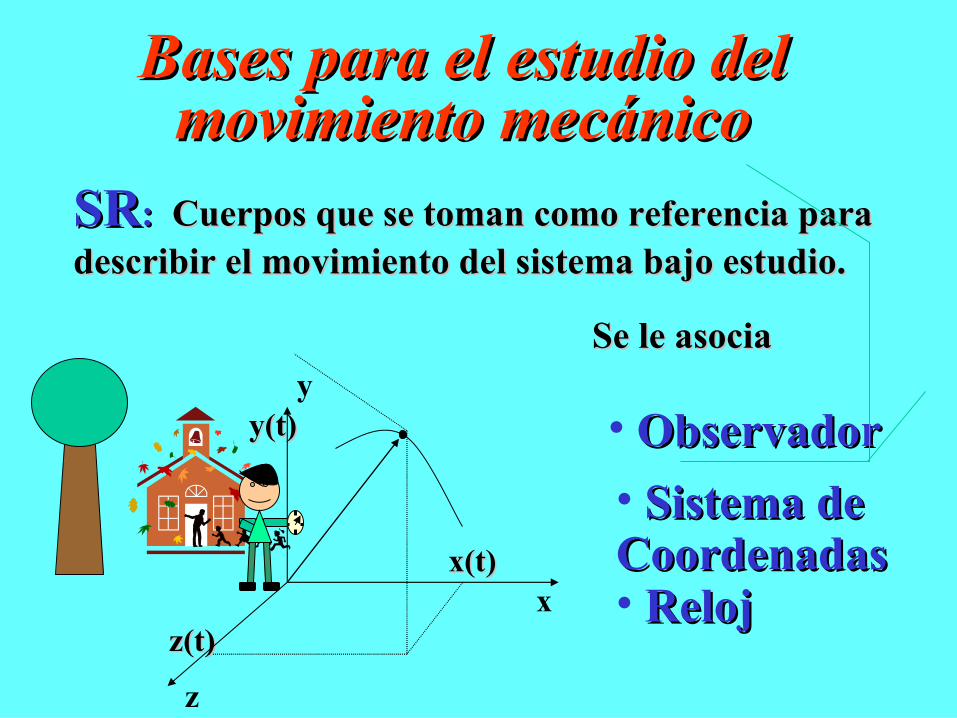
SRSR:: Cuerpos que se toman como referencia para Cuerpos que se toman como referencia para describir el movimiento del sistema bajo estudio.describir el movimiento del sistema bajo estudio.
Bases para el estudio del Bases para el estudio del movimiento mecánicomovimiento mecánico
x(t)x(t)
y(t)y(t)
z(t)z(t)
Se le asocia Se le asocia
• ObservadorObservador
• Sistema de Sistema de CoordenadasCoordenadas
y
x
z
• RelojReloj
Bases para el estudio del Bases para el estudio del movimiento mecánicomovimiento mecánico
SRISRI:: Es aquel para el cual el Es aquel para el cual el sistema bajo estudio en sistema bajo estudio en
ausencia de la acción de otros ausencia de la acción de otros cuerpos, se mueve con MRU.cuerpos, se mueve con MRU.
Bases para el estudio del Bases para el estudio del movimiento mecánicomovimiento mecánico
Magnitudes Físicas Magnitudes Físicas
CinemáticasCinemáticas
Posición, Posición, Velocidad, Velocidad,
Aceleración Aceleración
Dinámicas Dinámicas
Fuerza, Torque Fuerza, Torque
Bases para el estudio del Bases para el estudio del movimiento mecánicomovimiento mecánico
ModelosModelos
de Partícula: de Partícula: el cuerpo puede ser el cuerpo puede ser considerado como un objeto puntual.considerado como un objeto puntual.
de Cuerpo Rígido: de Cuerpo Rígido: Las distancias Las distancias entre los diferentes puntos del entre los diferentes puntos del cuerpo no varían.cuerpo no varían.
Traslación puraTraslación pura
Rotación pura de cuerpo Rotación pura de cuerpo sólidosólido
Es aplicable el modelo del cuerpo Es aplicable el modelo del cuerpo rígido pero no el de partícularígido pero no el de partícula
ObjetivoObjetivo
Determinación de las Determinación de las Leyes del Leyes del MovimientoMovimiento
Problemas de Problemas de la cinemáticala cinemática
Posición (t)Posición (t)
VelocidadVelocidad (t)(t)
AceleraciónAceleración (t)(t)
P. D
irectoP
. Directo P
. In
vers
oP
. In
vers
o
Con
d. I
nic
iale
sC
ond.
In
icia
les
( )ttr ∆+
( )tr
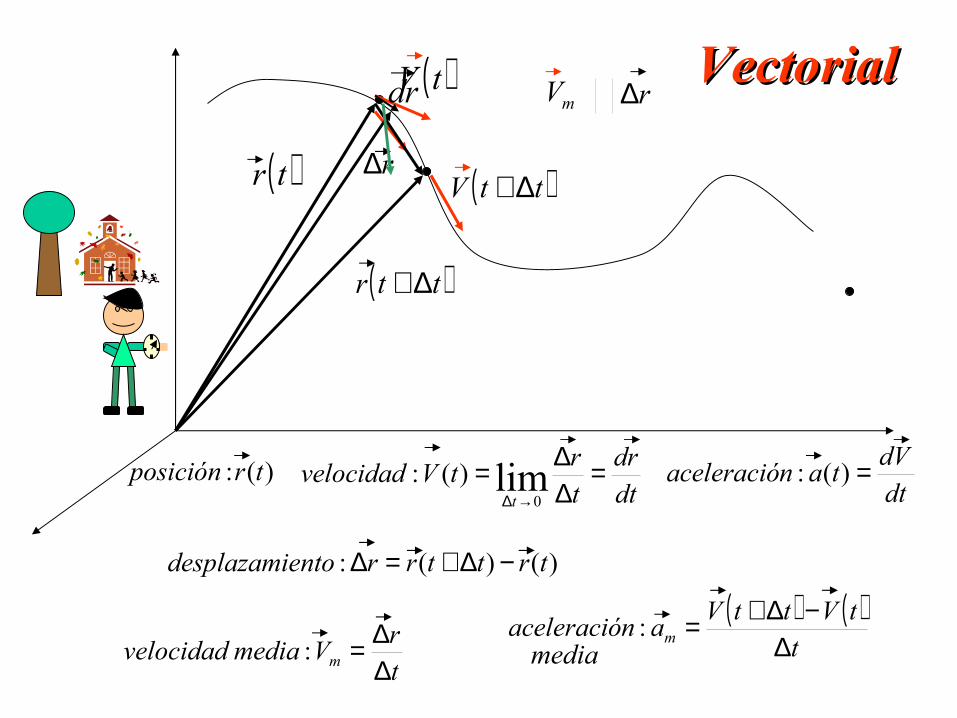
)(: trposición
( )ttV ∆+
( )tV
dtdr
tr
tVvelocidadt
=∆∆=
→∆lim
0
)(:dtdV
tanaceleració =)(:
mV r∆
tr
Vmediavelocidad m ∆∆=:
r∆
)()(: trttrrentodesplazami −∆+=∆
( ) ( )t
tVttVanaceleració m ∆
−∆+=:media
VectorialVectorialdr
)(tx
)(ty
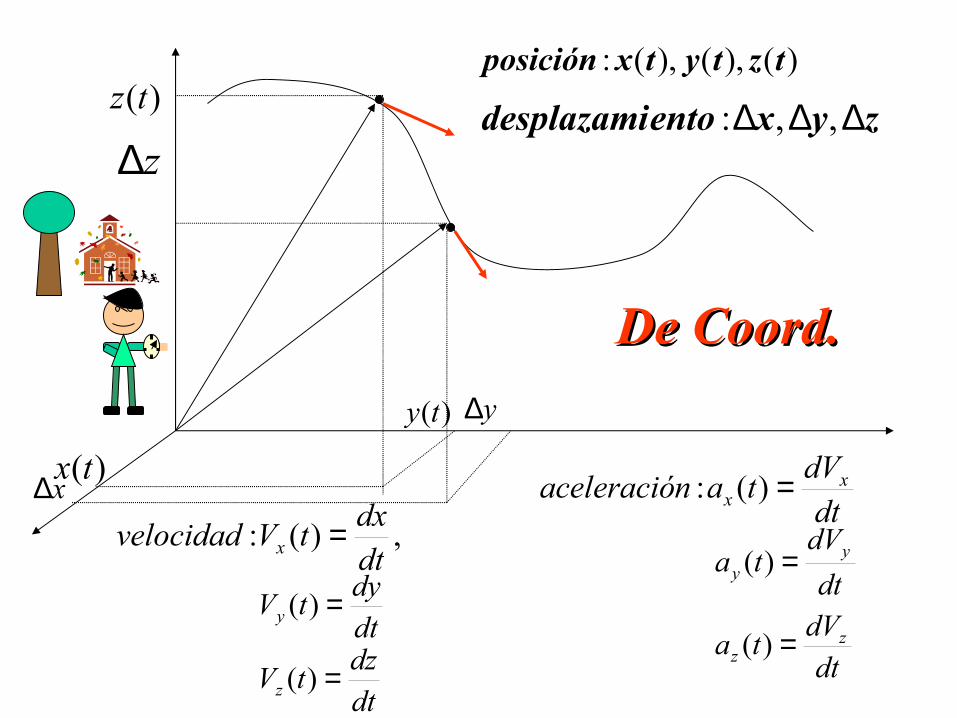
)(tz)(),(),(: tztytxposición
,)(:dtdx
tVvelocidad x =
dt
dytVy =)(
dt
dztVz =)(
dtdV
tanaceleració xx =)(:
dt
dVta y
y =)(
dt
dVta z
z =)(
De Coord.De Coord.
y∆
x∆
z∆zyxentodesplazami ∆∆∆ ,,:
,)(: ττ Vdtds
tVvelocidad ==
τdt
dVtaT =)(
Ta
a
22
TNaaa +=
τn
0=s0<s
nV
dtd
Vtanaceleració N ρτ 2
)(: ==
Na
NaturalNatural
)()(: τVdtd
dtdV
tanaceleració ==
ρ
n
)(: tsposición
0>sτ
τ τ
MetodologíaMetodología• Identificar sistema físicoIdentificar sistema físico
• Selección del SRI (Ubicación del Observador)Selección del SRI (Ubicación del Observador)
• Selección del método o métodos (vectorial, de Selección del método o métodos (vectorial, de coordenadas o natural)coordenadas o natural)
• Resolver el problema directo (Resolver el problema directo (derivandoderivando) o el ) o el indirecto (indirecto (integrandointegrando) o ambos: ) o ambos: Hallar Hallar analíticamente la dependencia temporal de la analíticamente la dependencia temporal de la posición, la velocidad y la aceleración; y posición, la velocidad y la aceleración; y Dibujar las gráficasDibujar las gráficas
y
x
t1
t2
A
B
r∆
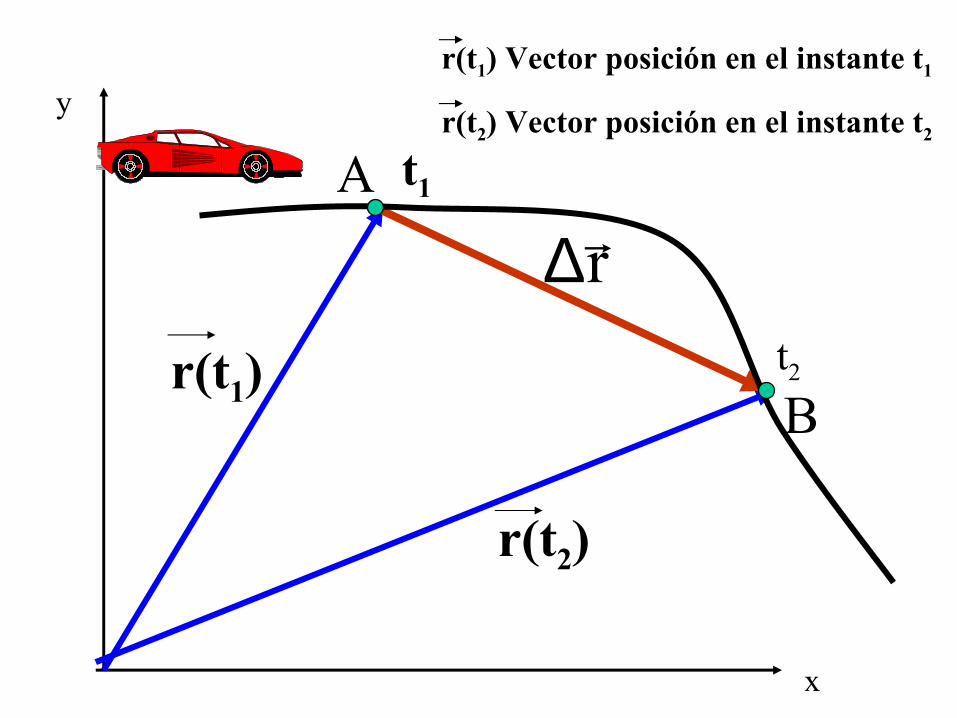
r(t1)
r(t2)
r(t1) Vector posición en el instante t1
r(t2) Vector posición en el instante t2
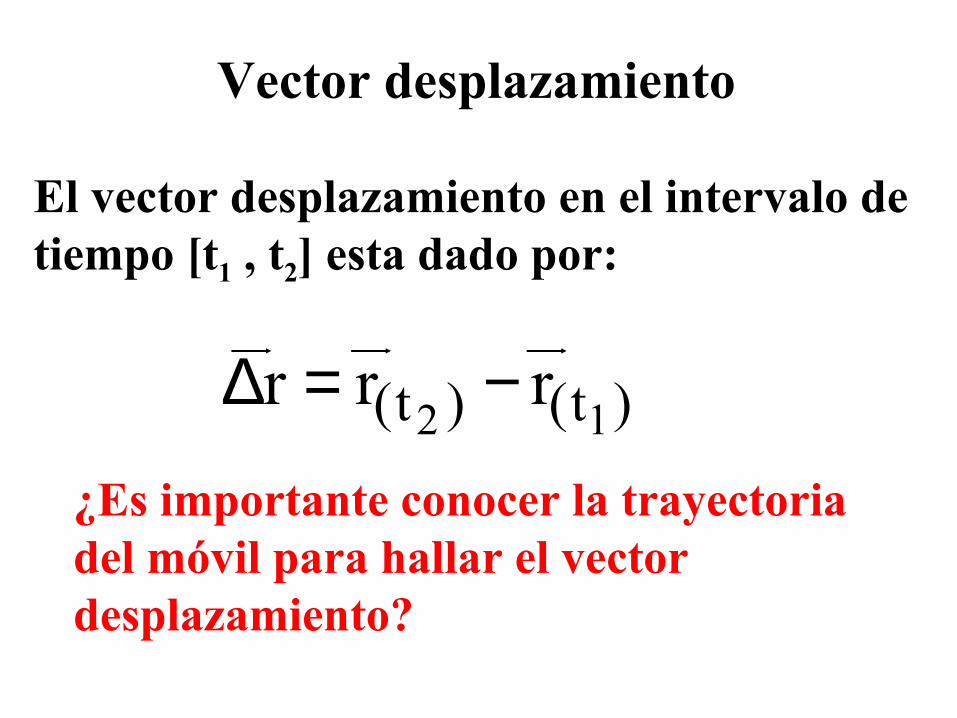
Vector desplazamiento
El vector desplazamiento en el intervalo de tiempo [t1 , t2] esta dado por:
¿Es importante conocer la trayectoria del móvil para hallar el vector desplazamiento?
)t()t( 12rrr −=∆
B
t1
t2No es necesario conocer la trayectoria para determinar el vector desplazamiento en el intervalo de tiempo deseado, solo es necesario conocer las posiciones en dichos instantes de tiempo
A
r∆
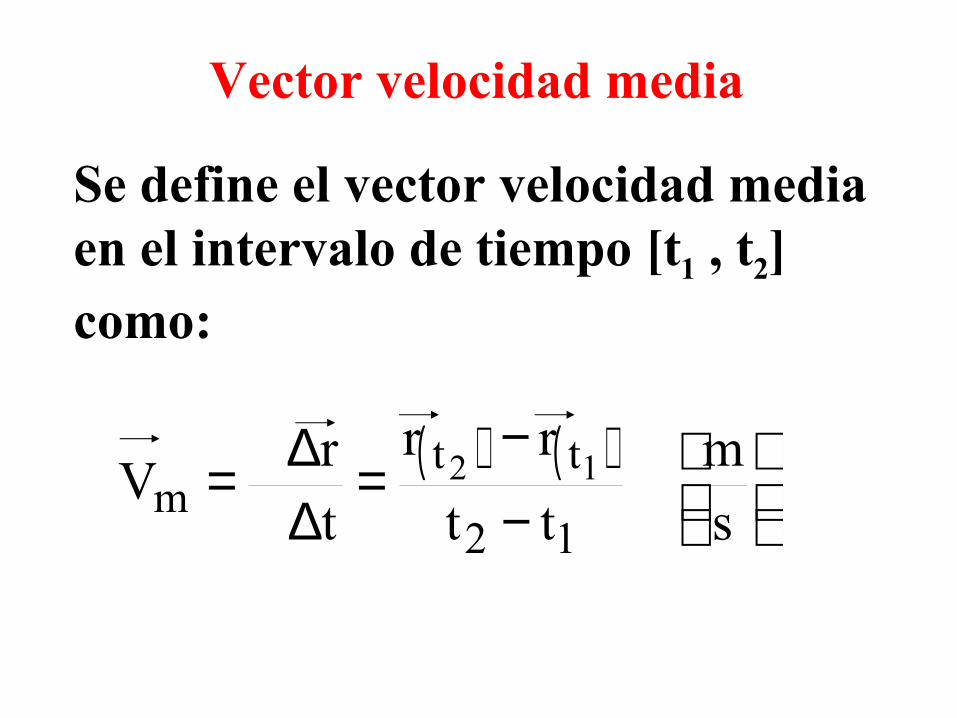
Vector velocidad media
Se define el vector velocidad media en el intervalo de tiempo [t1 , t2] como:
( ) ( )
−−
=∆∆=
sm
tt
rr
tr
V12
ttm
12
y
x
t1
t2
A
B
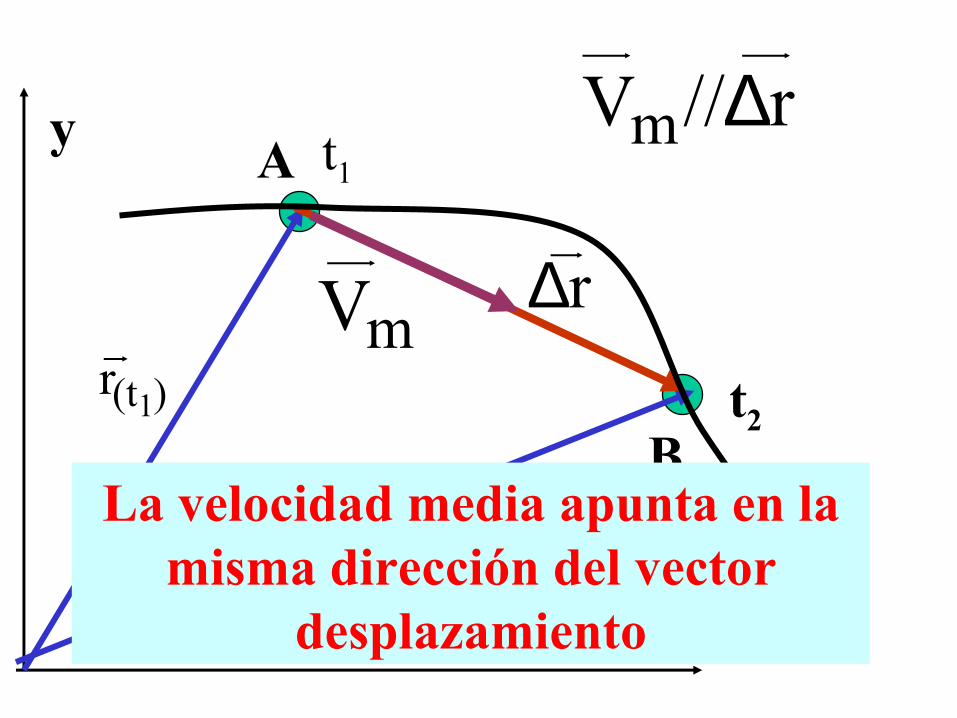
r∆mV
r//Vm ∆
)(t1r
)(t2r
La velocidad media apunta en la misma dirección del vector
desplazamiento
Y(m)
x(m)
t1
t2Δl
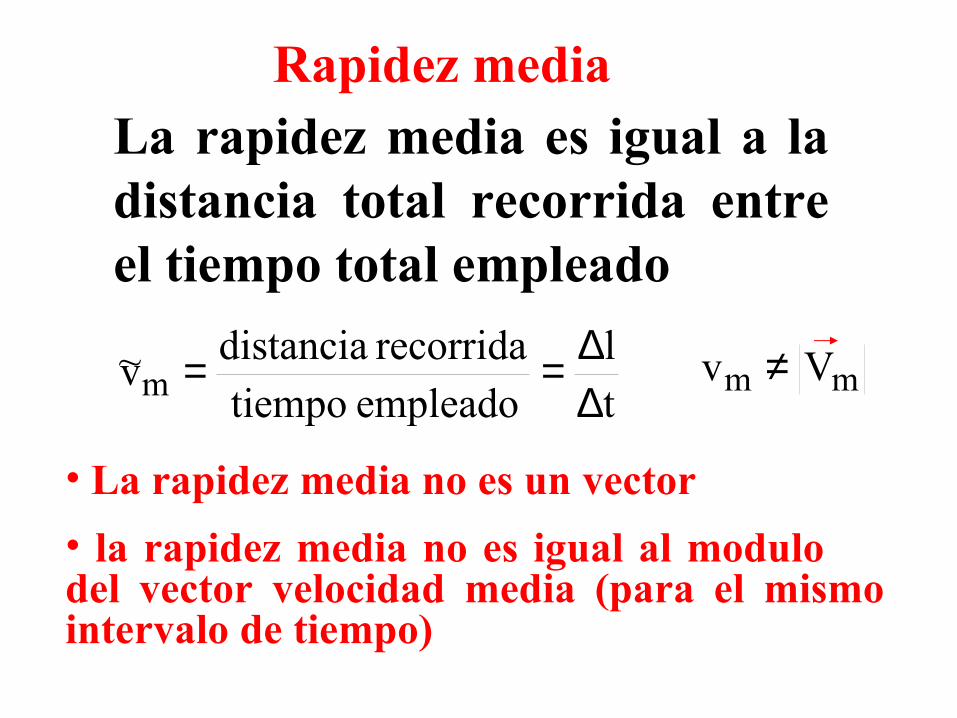
:Δl Distancia total recorrida en el intervalo de tiempo [t1 , t2]
r∆
Rapidez mediaLa rapidez media es igual a la distancia total recorrida entre el tiempo total empleado
tl
empleadotiemporecorridadistancia
v~m ∆∆==
• La rapidez media no es un vector
• la rapidez media no es igual al modulo del vector velocidad media (para el mismo intervalo de tiempo)
mm Vv ≠
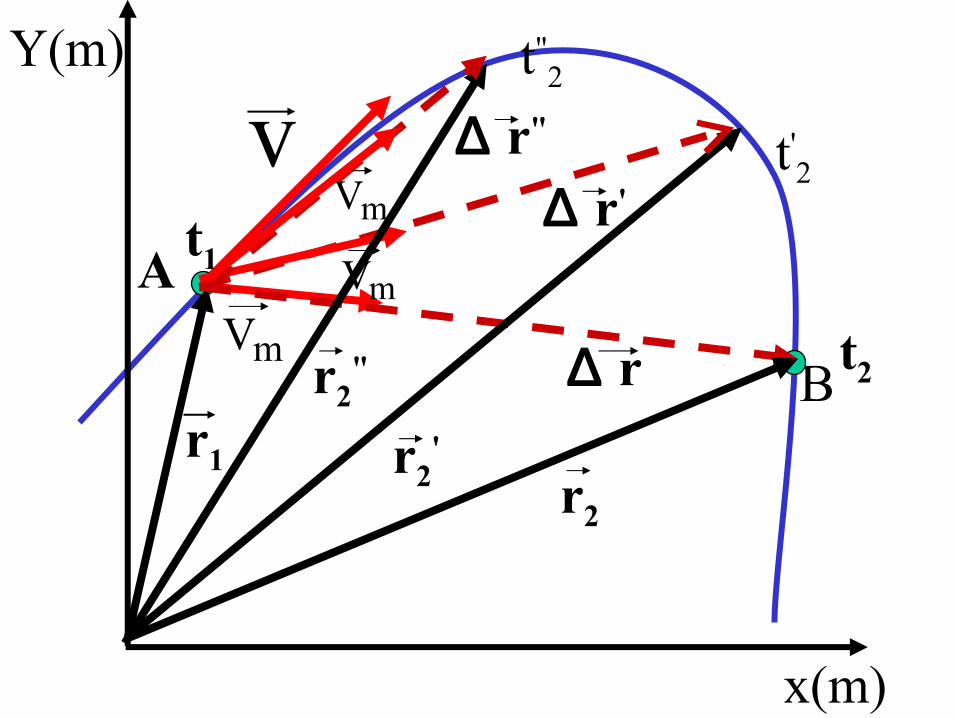
t2
t'2
t"2
t1
B
A
Y(m)
x(m)
v
r1
∆ r
r2
mV
r2'
∆ r'
mV
r2"
∆ r"
mV
t3A
Y(m)
x(m)
El vector velocidad instantánea es tangente a la
trayectoria que describe la partícula
t2
t1
)v(t1 )v(t2)v(t3
τ= vv
τ
ττ
La velocidad instantánea es la derivada del vector posición respecto del tiempo
Velocidad instantánea
dtdr
tr
limv(t) 0t =∆∆= →∆
Esta expresión podemos expresarla en función de sus componente rectangulares
dtdx(t)
vx =dt
dy(t)vy =
dtdz(t)
vz =
dtdr
tr
limv(t) 0t =∆∆= →∆
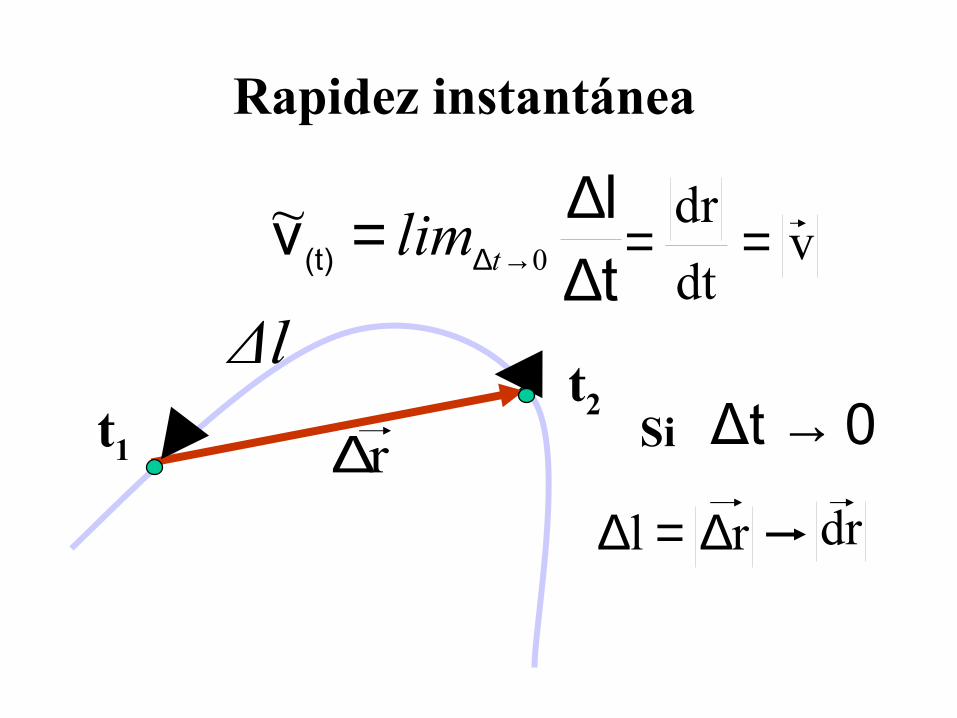
Rapidez instantánea
tl
v(t) ∆∆= →∆ 0
~tlim
Si 0Δt →r∆t1
t2
Δl
rl ∆=∆ dr
vtd
dr==
Rapidez instantánea
La rapidez instantánea es igual al modulo de la velocidad instantánea
dtdr
tr
limv~ 0t(t) =∆∆= →∆
)t((t) vv~ =Al modulo de la velocidad instantánea se le conoce como rapidez instantánea
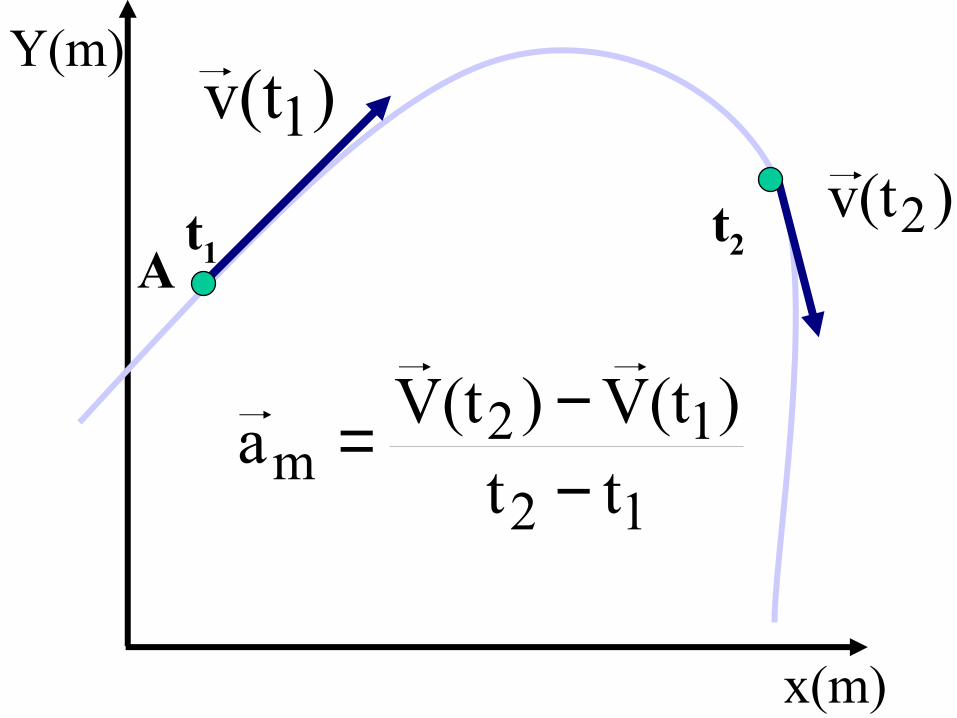
A
Y(m)
x(m)
t2t1
12
12m tt
)V(t)V(ta
−−=
)v(t1)v(t2
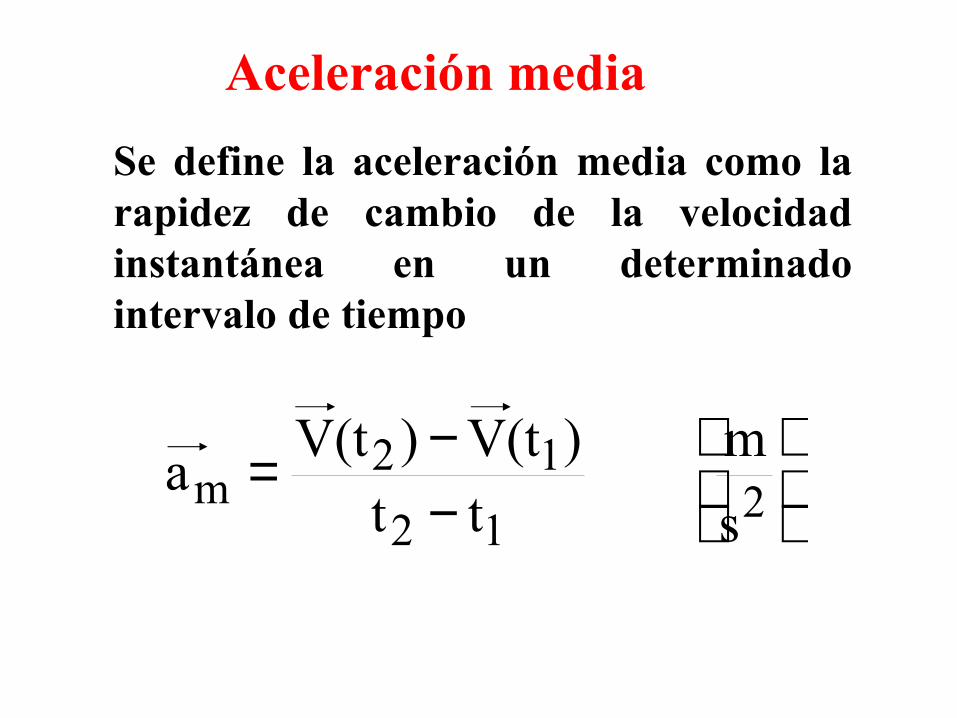
Aceleración media
Se define la aceleración media como la rapidez de cambio de la velocidad instantánea en un determinado intervalo de tiempo
−−=
212
12m
s
mtt
)V(t)V(ta
v∆
)v(t1)v(t2 )v(t2
)v(t- 1ma [ ]21 t,t
ma
1t2t
ma
Y(m)
x(m)
La aceleración en este pequeño intervalo de tiempo apunta hacia la concavidad
de la trayectoria
t)v(t
t1 )v(t1
v∆
v∆ atV
lima ot(t) ∆∆= →∆
a
dtˆd
vdtdv
ˆaτ+τ=
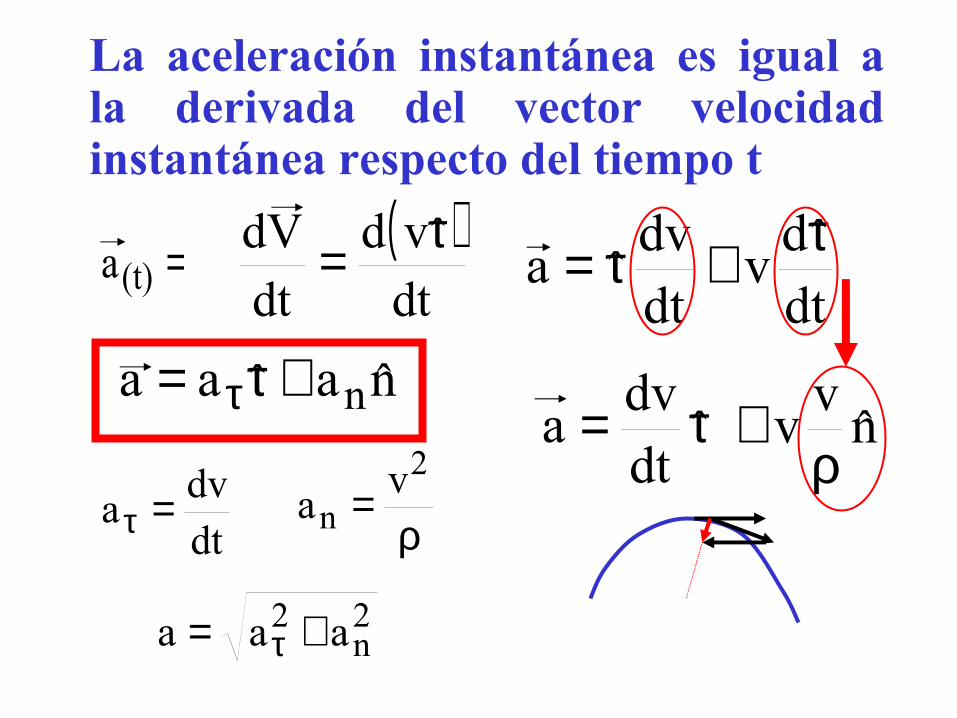
La aceleración instantánea es igual a la derivada del vector velocidad instantánea respecto del tiempo t
=(t)a( )dt
ˆvddtdV τ=
nv
vρ
+τ= ˆdtdv
anaˆaa n+τ= τ
dtdv
a =τ ρ=
2
nv
a
2n
2 aaa += τ
Na
Ta
Es la aceleración normal , responsable del cambio de dirección de la velocidad
Es la aceleración tangencial responsable del cambio del modulo de la velocidad
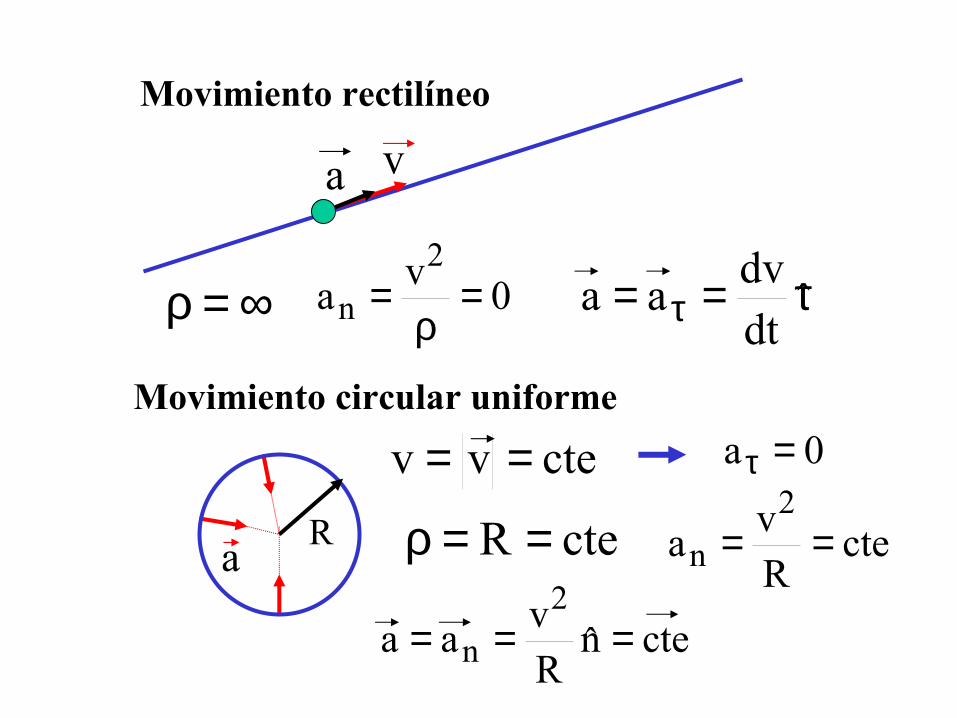
ctevv ==
cteR ==ρ
Movimiento rectilíneo
∞=ρ 0v
a2
n =ρ
=
v
τ== τ ˆdtdv
aa
a
0a =τ
cteRv
a2
n ==
ctenRv
aa2
n ===
Movimiento circular uniforme
Ra
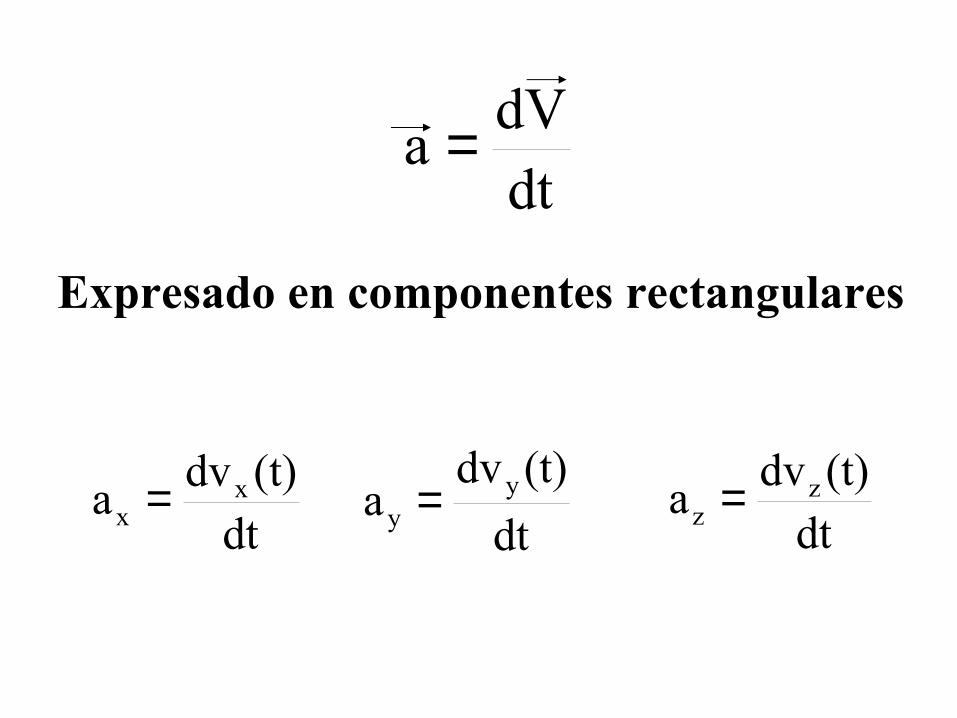
dt(t)dv
a xx =
dt
(t)dva y
y =dt
(t)dva z
z =
Expresado en componentes rectangulares
dtdV
a =
Resumen:
Si se conoce la posición de la partícula con el
tiempo r(t) podemos determinar su velocidad y aceleración instantánea por simple derivación
dt
drv (t)
(t) =
2(t)
2(t)
(t)dt
rd
dt
dva == naa += τ
Problema directo
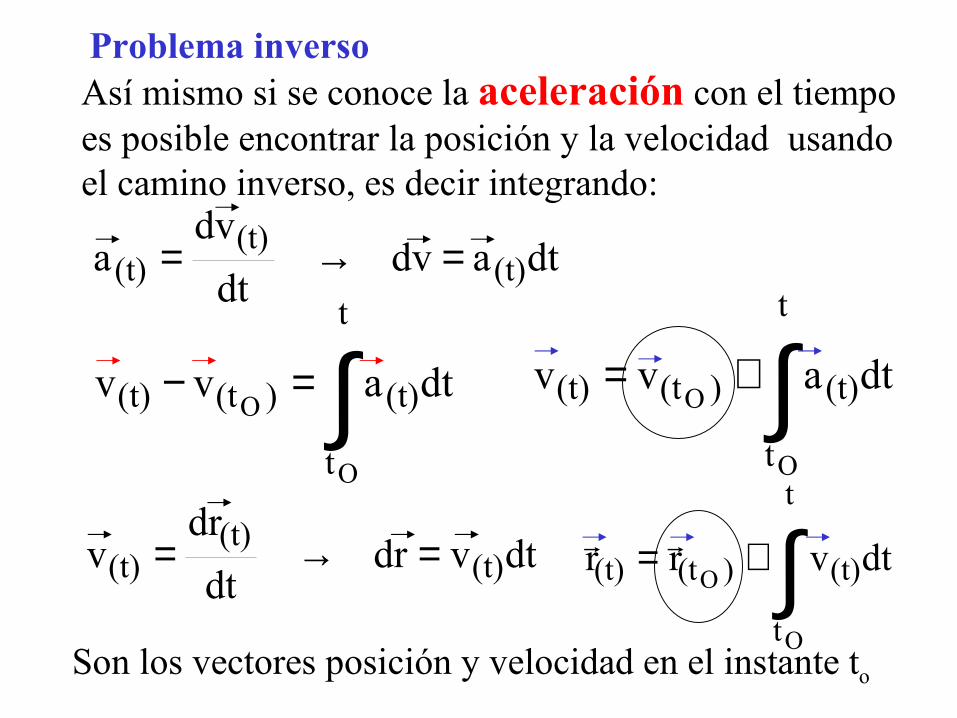
Así mismo si se conoce la aceleración con el tiempo es posible encontrar la posición y la velocidad usando el camino inverso, es decir integrando:
dtadvdt
dva (t)
(t)(t) =→=
∫=−
t
t
(t))(t(t)
O
Odtavv ∫+=
t
t
(t))(t(t)
O
Odtavv
dtvdrdt
drv (t)
(t)(t) =→= ∫+=
t
t
(t))(t(t)
O
Odtvrr
Son los vectores posición y velocidad en el instante to
Problema inverso
Ejemplo 1:Si el vector posición de una partícula esta dada por:
ktj1)2t(ti1)(2tr 423
(t)ˆˆˆ ++++−=
Hallar:1) el vector posición para t= 0 y 2 s 2)El vector desplazamiento en el intervalo [0,2]s3) su velocidad media en el intervalo [0,2]ssu velocidad instantánea en t = 0 y t=2 s5) su aceleración media en el intervalo [0,2]s6) su aceleración instantánea en t = 0 y 2s
Movimiento en una dimensión
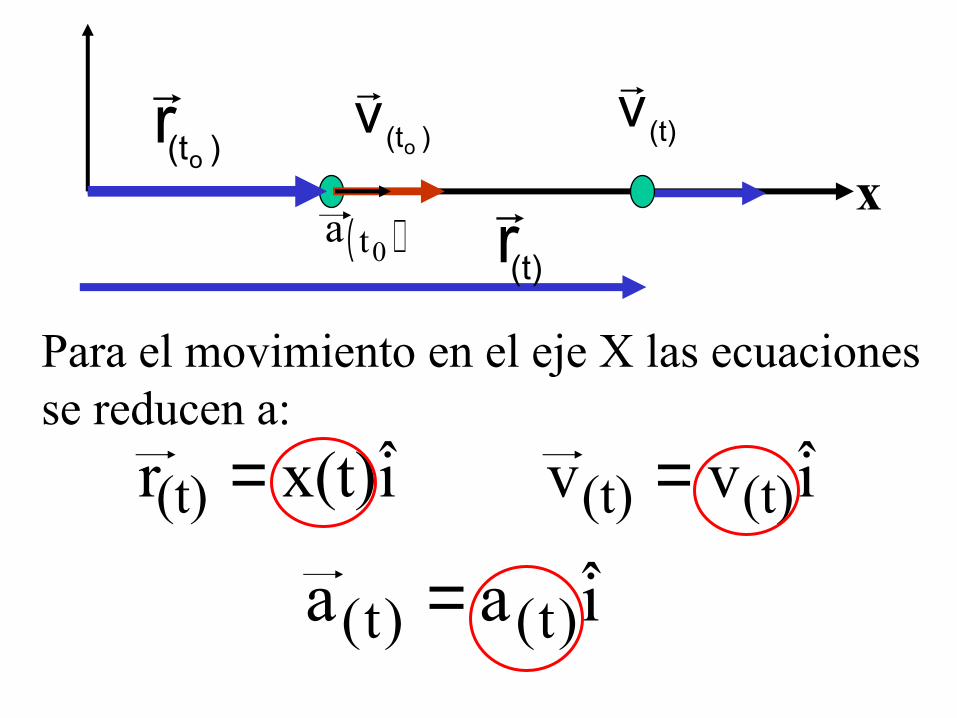
Podemos aplicar lo discutido anteriormente al caso de una partícula moviendose en una sola dimensión, por ejemplo a lo largo del eje x
ivvix(t)r (t)(t)(t) ==
iaa )t()t( =
x)(to
v
(t)v
)(tor
(t)r
Para el movimiento en el eje X las ecuaciones se reducen a:
( )0ta
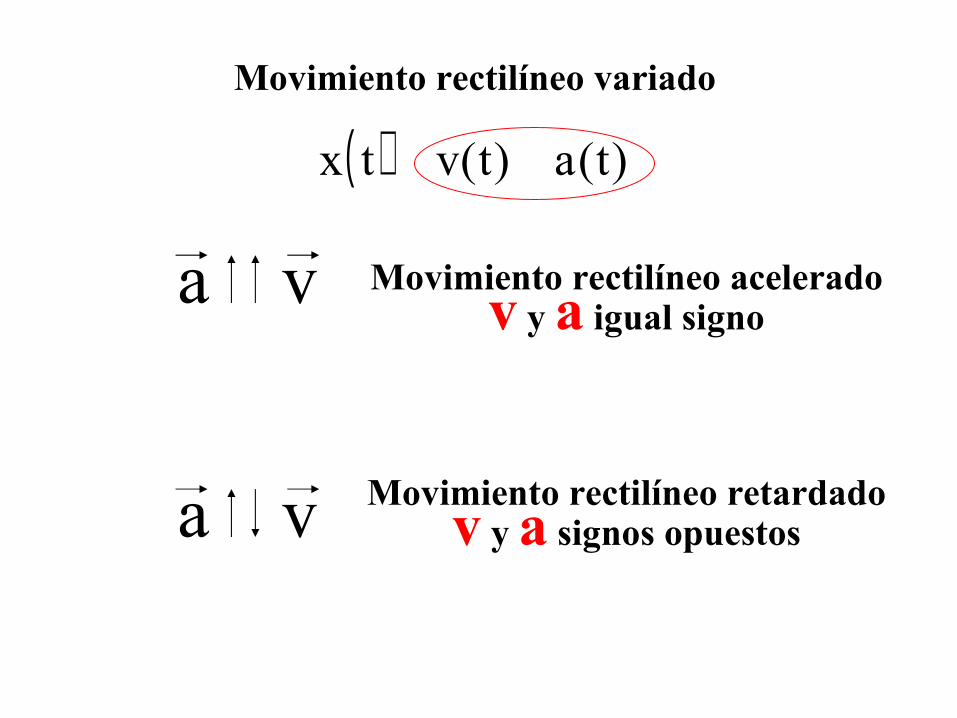
Movimiento rectilíneo variado
va Movimiento rectilíneo aceleradov y a igual signo
va
( ) )t(a)t(vtx
Movimiento rectilíneo retardadov y a signos opuestos
Velocidad instantánea
x
tO
P
Q’’ Q’
Q
ti
Xi
∆t1
∆t2
∆t3
Línea tangente
υ =
=
→lim
x
tdx
dt
t∆
∆∆0
X(t)
t
p
Q
R 0v <
0v =
0v >
dt
dxv (t)=
Velocidad instantánea
υ
tti tf
∆t
a > 0a = 0
a < 0
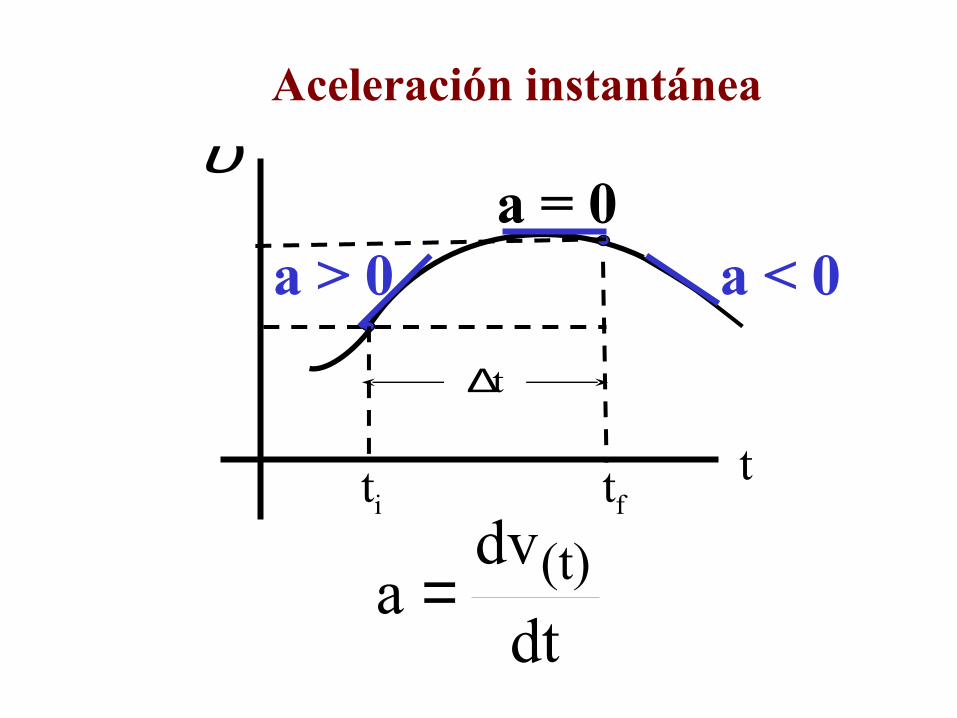
Aceleración instantánea
dt
dva (t)=
υ
tti tf
∆t
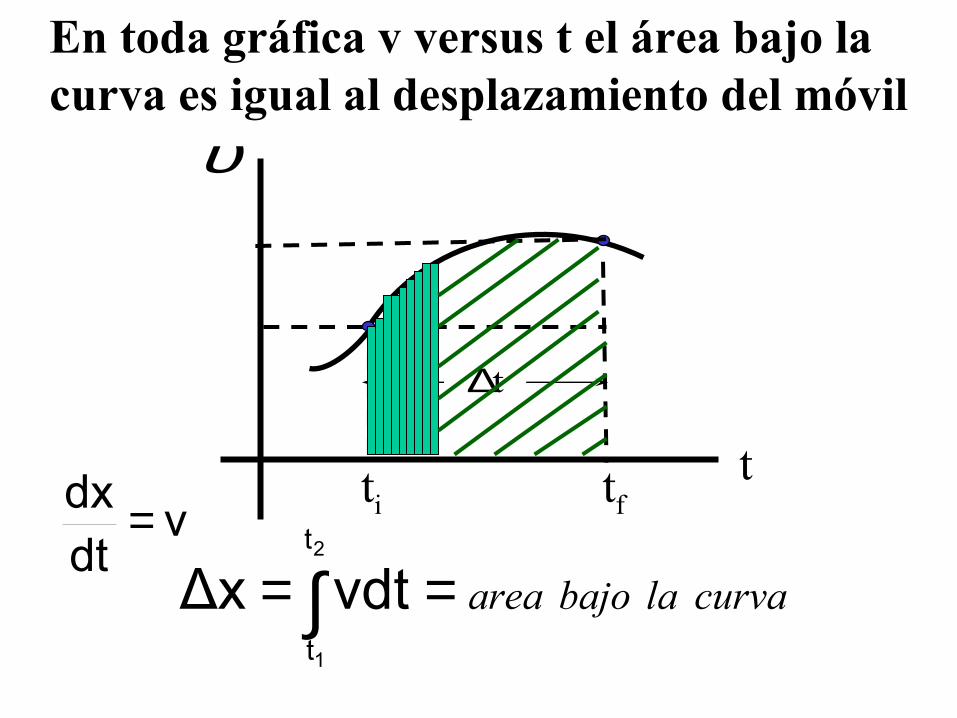
En toda gráfica v versus t el área bajo la curva es igual al desplazamiento del móvil
curvalabajoarea== ∫2
1
t
t
vdtΔxv
dtdx =
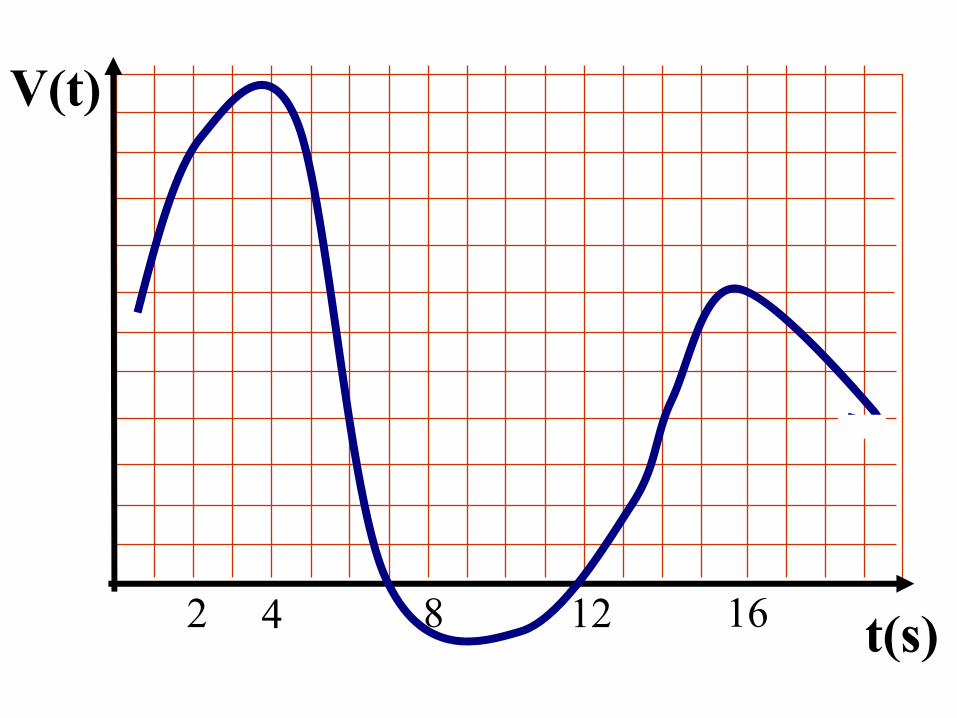
Ejemplo 1:
En la gráfica velocidad versus tiempo, haga un análisis del tipo de movimiento e indique en que tramos el movimiento es acelerado o desacelerado
2 4 8 12 16 t(s)
V(t)
Diremos que un movimiento rectilíneo es uniforme variado si la aceleración del móvil permanece constante en todo momento.
Supongamos que una partícula parte de la posición xo en el instante t0=0 , con una velocidad vo
x
∫∫ =t
0
v
v
adtdvo
aov (t)vox
(t)xt=0
Como a= cte. entonces dv/dt=a es fácil de integrar
tvv o(t) a+= Velocidad instantánea
Problema inverso
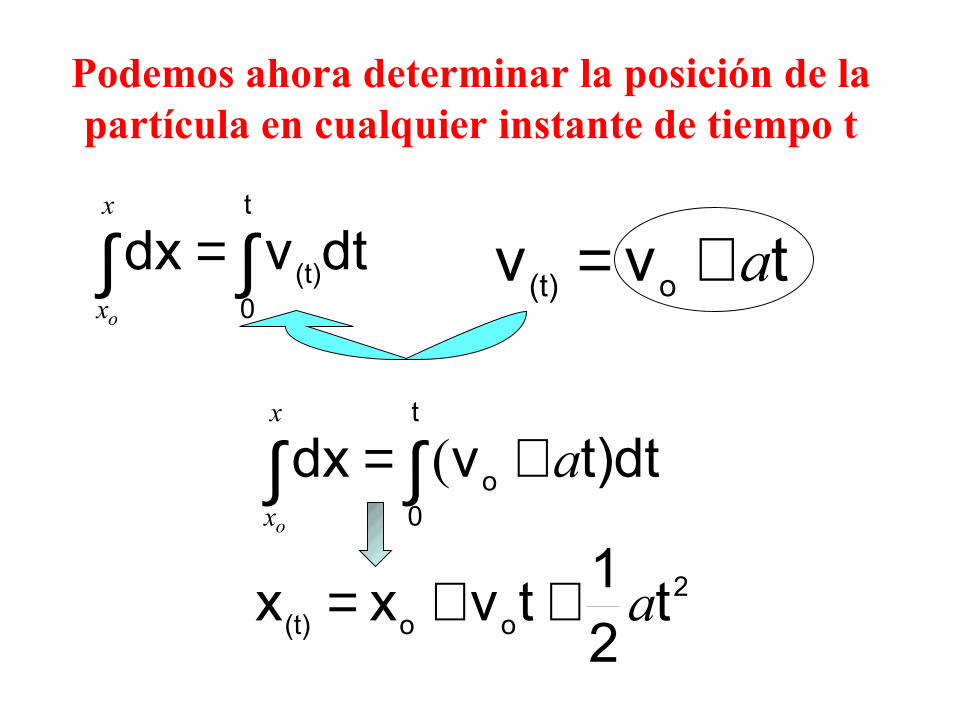
Podemos ahora determinar la posición de la partícula en cualquier instante de tiempo t
∫∫ =t
0(t)dtvdx
x
xo
∫∫ +=t
0o t)dtvdx a
x
xo
(
tvv o(t) a+=
2oo(t) t
21
tvxx a++=
x
aov (t)vox
(t)xt=0
Hallaremos ahora una expresión para determinar la velocidad media en el intervalo de tiempo [0, t]:
ΔtΔx
Vm =t
x-xV o(t)
m =
x
aov (t)vox
(t)xt=0
t
x-xV o(t)
m =
2oo(t) t
21
tvxx a+=−t
v-va o(t)=
Y usando las ecuaciones anteriormente deducidas
x
aov (t)vox
(t)xt=0
2
vv
t
x-xV o(t)o(t)
m
+==
Finalmente obtenemos
x
aov (t)vox
(t)xt=0
Δx2vv 2
0
2
(t)a+=
También se puede demostrar:
Donde : 0(t) xxΔx −=Es el desplazamiento en el intervalo de tiempo [0 , t]














































![cinematica differenziale e statica differenziale... · Controllo dei robot - Cinematica differenziale e statica- P. Rocco [2] Cinematica differenziale e statica Parte I Cinematica](https://static.documents.pub/doc/80x56/5fec7e0b62510a5eba1dc9d2/cinematica-differenziale-e-statica-differenziale-controllo-dei-robot-cinematica.jpg)






