Constructing N-body Simulations with General Relativistic Dynamics Mateja Gosenca University of Sussex Collaborators: Julian Adamek, Shaun Hotchkiss Queen Mary University of London, 27 May 2015
Transcript
Constructing N-body Simulations with General Relativistic Dynamics
Mateja GosencaUniversity of Sussex
Collaborators: Julian Adamek, Shaun Hotchkiss
Queen Mary University of London, 27 May 2015
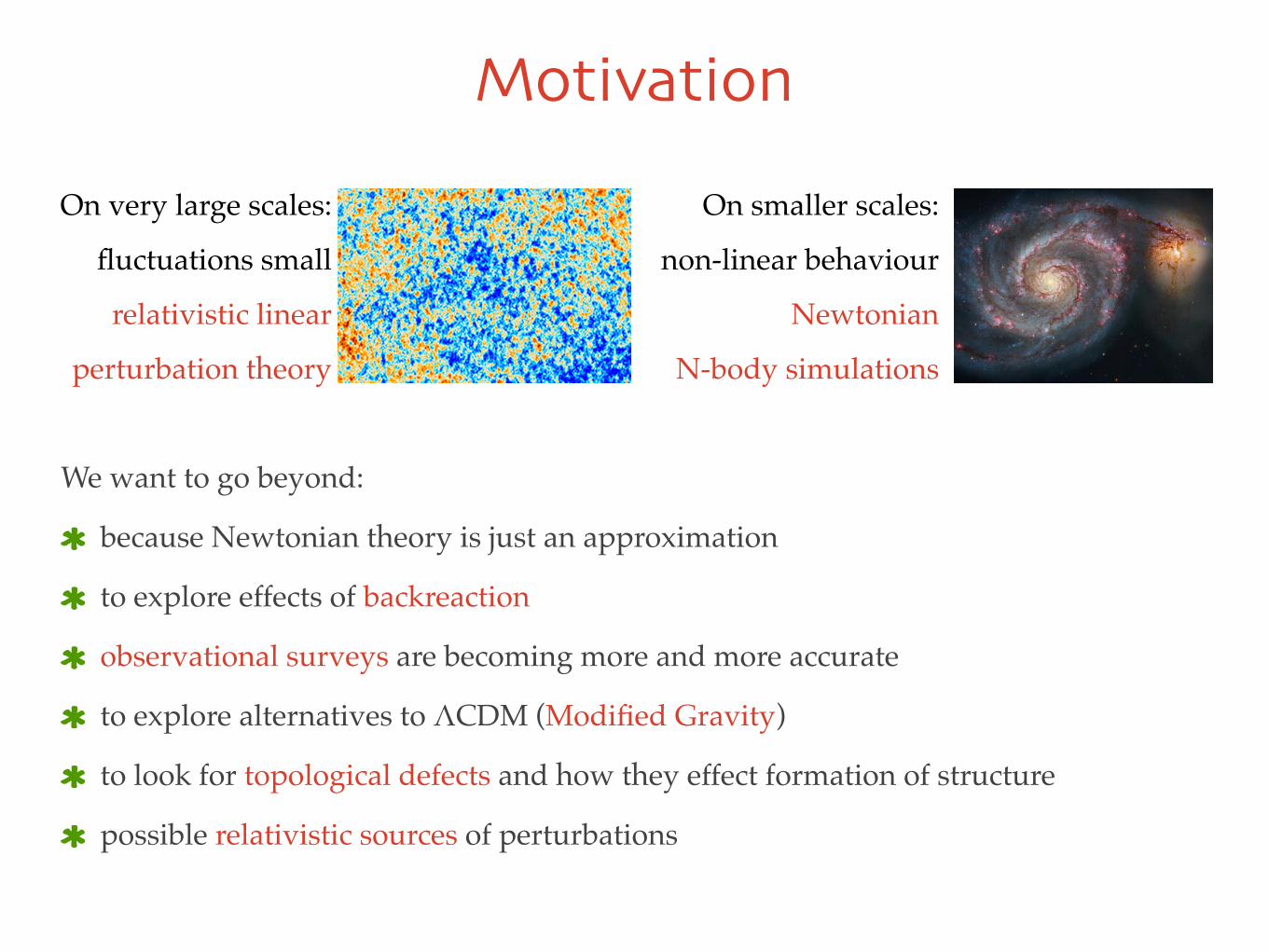
Motivation
We want to go beyond:
because Newtonian theory is just an approximation
to explore effects of backreaction
observational surveys are becoming more and more accurate
to explore alternatives to ΛCDM (Modified Gravity)
to look for topological defects and how they effect formation of structure
possible relativistic sources of perturbations
On very large scales:
fluctuations small
relativistic linear
perturbation theory
On smaller scales:
non-linear behaviour
Newtonian
N-body simulations
The formalism
ds
2 = a
2(⌧)[�(1 + 2 )d⌧2 � 2Bixid⌧ + (1� 2�)�ijdx
idx
j + hijdxidx
j ]
The metric in longitudinal gauge:
Green and Wald: arXiv:1011.4920, 1111.2997
Adamek et al: arXiv:1408.3352
Example: we keep terms:
gravitational potentials are ~10-5
gradients related to peculiar velocities and therefore ~10-3
second spatial derivatives: non perturbative
galactic and cluster scales
Approximation:
every metric perturbation ~ ε every spatial derivative ~ ε-1/2
⇠ �
⇠ �,i�,j or ��,ij
}
“the weak-field limit“, but with spatial derivatives up to all orders
Equations of motion:
(from the time-time part)
(from the transverse-traceless spatial part)
Where the energy-momentum tensor is given by:
T
µ⌫ =X
n
m(n)�
(3)(x� x(n))p�g
�g↵�
dx↵(n)
d⌧
dx�(n)
d⌧
!�1/2dxµ
(n)
d⌧
dx⌫(n)
d⌧
and: ⇧ij = �ikTkj � 1
3�ijT
kk
Adamek et al: arXiv:1408.3352
Post-Newtonian estimation has been used to probe relativistic effects:
using the output of a 3D purely Newtonian simulation (Gadget 2)
(�� )Bi
hij
ds
2 = a
2(⌧)[�(1 + 2 )d⌧2 � 2Bixid⌧ + (1� 2�)�ijdx
idx
j + hijdxidx
j ]
Toy model: spherical symmetryMotivation:
Spherical metric:
simplifies the equations to solve
much faster compared to the full 3D simulation
you can run many simulations for different configurations
easy to compare to the analytical solution
in addition, useful to model e.g. expansion of a void
ds2 = �a2(⌧)⇥(1 + 2 (⌧, r)) d⌧2 + (1� 2�(⌧, r))
�dr2 + r2d⌦2
�⇤
metric perturbations depend only on radial coordinate
and comoving time
particles are pressureless “spherically symmetric shells”
�,rr +2
r�,r � 3H�,⌧ � 3H2(�� �) +
3
2(�,r)
2 = �4⇡Ga2(1� 4�)�T 00
The Einstein equations:
From we get:
From , the traceless part of the
“space-space” component we get :
G00 = 8⇡GT 0
0
Gij �
1
3�ijG
kk = 8⇡G
✓T ij �
1
3�ijT
kk
◆
�,rr �1
r�,r + �2
,r + 2�2,r + 2
✓�,rr �
1
r�,r
◆(2�� �) = 12⇡Ga2(1� 2�)⇧rr
� = �� where⇧ij = �ikTkj � 1
3�ijT
kk
We define the covariant momentum:
p =(1� �)
�drd⌧
�q
1 + 2 � (1� 2�)�drd⌧
�2dp
d⌧= �(H� �,⌧ )p� ,r
p1 + p2
from the geodesic equation velocities don’t need to be small!
Discretisation In order to solve Einstein’s equations numerically we need to discretise them.
The spatial domain is divided into n comoving “grid-cells”
Fields live on the grid-cells
Energy-momentum tensor lives in the grid cells
Particles live in “continuous” space
We need to establish a correspondence between the two
1) project particles’ positions to the grid to determine the density and energy-
momentum tensor at each grid cell using particle-to-mesh projection
2) discretise EOM and solve for potential and
3) update particles’ momenta using geodesic equation:
4) evolve particles’ positions using:
5) evolve the background:
Steps 3-5 are done simultaneously, using Runge-Kutta 4.
�
dp
d⌧= �(H� �,⌧ )p� ,r
p1 + p2
dr
d⌧=
pp1 + p2
(1 + �+ )
H2 =8⇡G(⇢+ ⇤)
3
Initial conditions
0.9991
1.005
r
rêr
0.995
11.001
r
rêroverdensity “void”
In the full 3D simulation:
To test our spherically symmetric case:Compensated top-hat profiles.
the Zel’dovich approximation
2LPT
An overdensityResults: testing the code
0.0 0.2 0.4 0.6 0.8 1.0
1.00
1.05
1.10
1.15
1.20
1.25
1.30
1.35
r
rêr
0.0 0.2 0.4 0.6 0.8 1.0
-8.¥10-10
-6.¥10-10
-4.¥10-10
-2.¥10-10
0
r
c=F-Y
0.0 0.2 0.4 0.6 0.8 1.0
-0.000025
-0.00002
-0.000015
-0.00001
-5.¥10-6
0
r
F
0.0 0.2 0.4 0.6 0.8 1.0-0.005
-0.004
-0.003
-0.002
-0.001
0.000
r
momentumHpL
phase - space portrait
difference of the potentials
potential
density
An underdensity (void)phase - space portrait:shell crossing
0.0 0.2 0.4 0.6 0.8 1.0
0.5
1.0
1.5
r
rêr
0.0 0.2 0.4 0.6 0.8 1.0
-2.5¥10-10-2.¥10-10-1.5¥10-10-1.¥10-10-5.¥10-11
0
r
c=F-Y
0.0 0.2 0.4 0.6 0.8 1.00
5.¥10-6
0.00001
0.000015
r
F
0.0 0.2 0.4 0.6 0.8 1.00.0000
0.0005
0.0010
0.0015
0.0020
r
momentumHpL
difference of the potentials
potential
density
Fields need to be weak, but density contrast doesn’t!
Comparison to the LTB solutionWe want to compare our results to analytical Lemaitre-Tolman-Bondi (LTB) solution
ds2 = �dt2 +(@rR(t, r))2
(1 + 2E(r))dr2 +R2(t, r)d⌦2
R(t, r) = �M(r)(1� cos ⌘)
2E(r)(⌘ � sin ⌘)2/3 = �2E(r)t2/3
M(r)2/3
The metric:
Solutions:
Where M(r) is just the mass within the radius r.
Specifically, with our top-hat initial conditions, we get:
r < r1
r1 < r < r2
Initially, we can perform a linear gauge transformation between LTB and our metricAt later times linearity breaks down so we can no longer compare the two solutions. Instead, we can compare gauge independent variables
E(r) ! �10a2in�1r2
27t2in
E(r) ! �10a2in
��2r3 + �1r31 � �2r31
�
27rt2in
Observables1) Redshift of an in-falling source
We track a ray of light, emitted at the boundary of top-hat overdensity through the simulation volume and “absorb” it at the other end To propagate the ray, simulation update step is sub-divided into n smaller steps: this is defined by the courant factor which sets the resolution in time
1 + z =(g
µ⌫
kµu⌫)|src
(gµ⌫
kµu⌫)|obs
the redshift:
gµ⌫kµu⌫ = �k0a[�(1� �� ( + �)p2)p
+(1 + � ( + �)p2)p
1 + p2]
From the null-shell condition (ds2=0) and geodesic equation you get:
dr
d⌧= ± (1 + + �) , d'
d⌧= 0
dk0
d⌧+
,⌧ ��,⌧ +2 ,r
✓dr
d⌧
◆+ 2H
�k0 = 0
LTB
Numerical
0.0 0.2 0.4 0.6 0.80.00
0.02
0.04
0.06
0.08
a
z
2) Lensing of non-radial rays (on an overdensity)
We solve the geodesic equation for number of rays incoming at different angles:
0 20 40 60 800.00000
0.00005
0.00010
0.00015
0.00020
incoming angle
deflection
Comparison to the Schwarzschild solutionMotivation: independent test of our numerical scheme Equations:
Compared to Newtonian solution
Compared to relativistic numerical sol
In post-Newtonian counting our numerical scheme is one orderbetter than purely Newtonian.
Schwarzschild metric in isotropic coordinatesds2 = �
�1� rS
4r
�2�1 + rS
4r
�2 dt2 +
⇣1 +
rS4r
⌘4 ⇥dr2 + r2d⌦2
⇤
Expansion for r >> rs:�1� rS
4r
�2�1 + rS
4r
�2 = 1 + 2 (r) = 1� rSr
+r2S2r2
+ . . .
⇣1 +
rS4r
⌘4= 1� 2�(r) = 1 +
rSr
+3r2S8r2
+ . . .
vacuum stationary solution
� = �GM/r
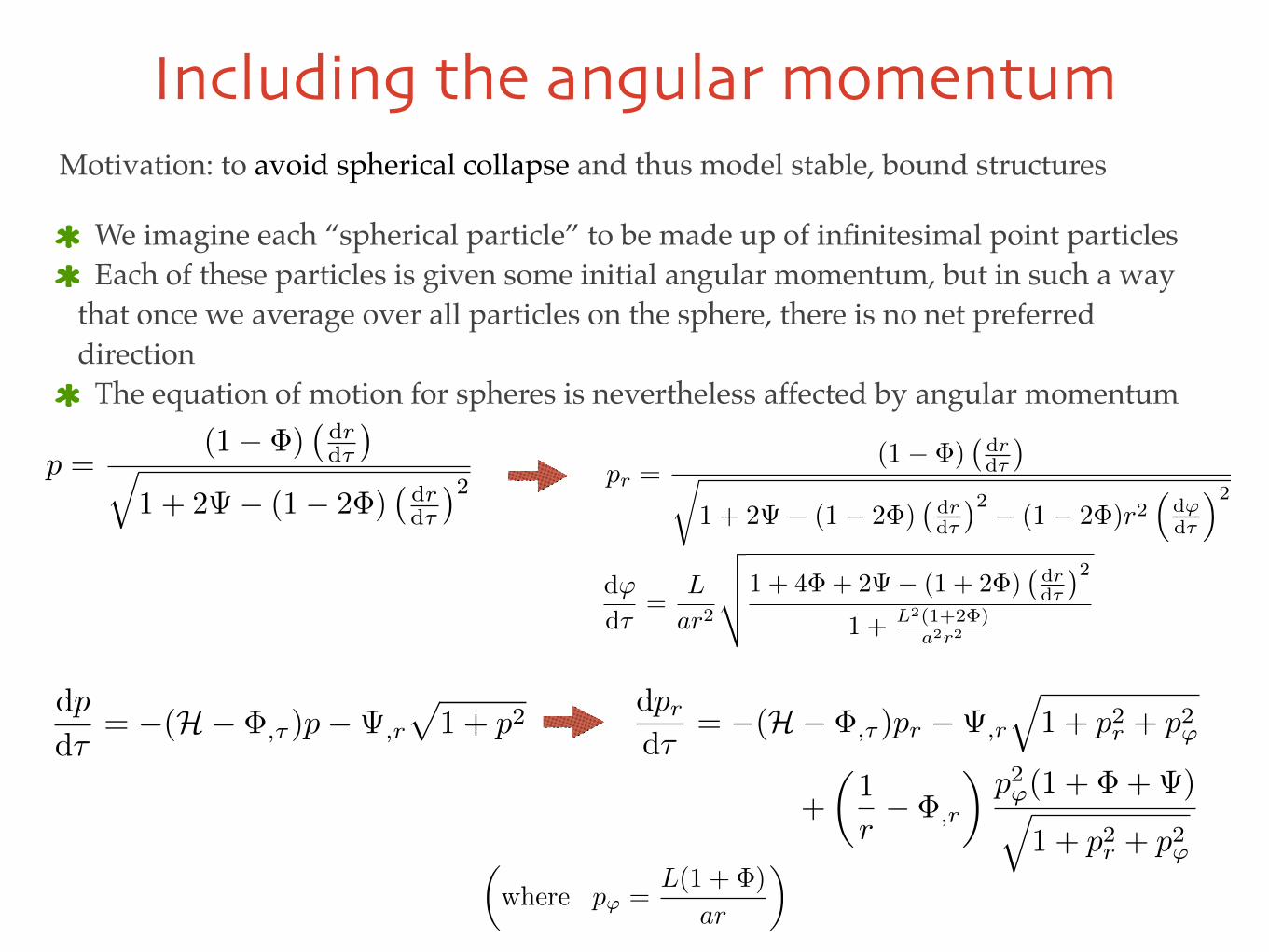
Including the angular momentum
pr =(1� �)
�drd⌧
�r
1 + 2 � (1� 2�)�drd⌧
�2 � (1� 2�)r2⇣
d'd⌧
⌘2p =
(1� �)�drd⌧
�q
1 + 2 � (1� 2�)�drd⌧
�2
We imagine each “spherical particle” to be made up of infinitesimal point particles Each of these particles is given some initial angular momentum, but in such a way that once we average over all particles on the sphere, there is no net preferred direction The equation of motion for spheres is nevertheless affected by angular momentum
Motivation: to avoid spherical collapse and thus model stable, bound structures
d'
d⌧=
L
ar2
vuut1 + 4�+ 2 � (1 + 2�)�drd⌧
�2
1 + L2(1+2�)a2r2
dp
d⌧= �(H� �,⌧ )p� ,r
p1 + p2
dprd⌧
= �(H� �,⌧ )pr � ,r
q1 + p2r + p2'
+
✓1
r� �,r
◆p2'(1 + �+ )q1 + p2r + p2'✓
where p' =L(1 + �)
ar
◆
Conclusions and future applications We implemented a general relativistic approximations that requires weak-field limit,
but allows large gradients of the fields and arbitrarily large velocities of particles
Spherical symmetry makes numerical solving simple and fast
Comparing our results to the analytical LTB solution we find good agreement
Comparing to Schwarzschild solution we find the approximation to be at the post-
Newtonian level of accuracy
In addition, our code can handle shell-crossing
Although spherical symmetry hides vector and tensor perturbations, one can still use
our approach to explore relativistic effects due to the difference of the potentials
In the future we want to: explore the effects of modified gravity or quintessence-type scalar field theory statistical study of properties of environments that allow creation of primordial black holes in the early universe