18
Robotics Club About Motivation Interested? Contact References Robotics Club Denise Ratasich Institut fuer Technische Informatik Technische Universitaet Wien Oktober, 2014 1/16

Robotics Club
About
Motivation
Interested?
Contact
References Robotics Club
Denise Ratasich
Institut fuer Technische InformatikTechnische Universitaet Wien
Oktober, 2014
1/16

Robotics Club
About
Motivation
Interested?
Contact
References
About
you:
I use our lab and research platforms (robots ;)
I work towards your master thesis
I get in touch with our research projects
I meet the institute
I write papers with institute members
we:
I gather smart ;) students
2/16

Robotics Club
About
Motivation
Interested?
Contact
References
drone simple
Parrot AR.Drone 2.0 [7]
I ARM9-core running at468 MHz may becontrolled by the ardronedriver of ROS over WiFi
I brushless motors
I front and bottom camera,accelerometer, gyroscope,ultrasonic sensors
projects:
I navigation, ...
Figure : Parrot AR.Drone [1]
3/16

Robotics Club
About
Motivation
Interested?
Contact
References
drone professionalAscTec Pelican [3]
I Intel R© CoreTM i7-3612QE (4 x 2.1 GHz) or 1.6 GHz IntelAtom processor board running Linux
I brushless motors, 10” propellors, max. payload 650g
I autopilot sensor board (accelerometer, gyroscope,pressure sensor, low-level and high-level control systems),magnetometer, GPS receiver, camera or laser scanner
I X-bee Pro, Datalink
projects:
I navigation, ...
4/16

Robotics Club
About
Motivation
Interested?
Contact
References
dagobert
Pioneer 3-AT [2]
I Mamba Dual-CoreComputer running Ubuntuand ROS [8]
I bumpers, RFID scanner,sonar sensors, laserscanner, camera
projects:
I mapping, navigation, pathplanning, swarm ...
5/16

Robotics Club
About
Motivation
Interested?
Contact
References
dagobert - Dynamic Probabilistic Mapping
6/16

Robotics Club
About
Motivation
Interested?
Contact
References
gpu-robot
Pioneer 3-AT [2]
I Carma Devkit from SECO[5] (CPU + Nvidia GPU with92 cores) running Ubuntuand ROS
I bumpers, sonar sensors,raspberry pi + extensionboard, accelerometers,gyroscope, compass,temperature and pressuresensor
projects:
I navigation, sensor fusion,swarm ...
7/16

Robotics Club
About
Motivation
Interested?
Contact
References
gpu-robot - Self Localization
8/16

Robotics Club
About
Motivation
Interested?
Contact
References
gpu-robot - Self Localization
8/16

Robotics Club
About
Motivation
Interested?
Contact
References
gpu-robot - Self Localization
8/16
Robotics Club
About
Motivation
Interested?
Contact
References
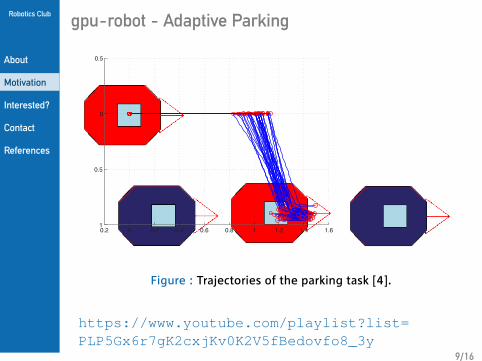
gpu-robot - Adaptive Parking
0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.61
0.5
0
0.5
Figure : Trajectories of the parking task [4].
https://www.youtube.com/playlist?list=PLP5Gx6r7gK2cxjKv0K2V5fBedovfo8_3y
9/16

Robotics Club
About
Motivation
Interested?
Contact
References
gpu-robot 2
Pioneer 3-AT [2]
I NVIDIA Jetson TK1 [6](ARM CPU + Kepler GPUwith 192 cores) runningUbuntu
I bumpers, sonar sensors,manipulator arm
projects:
I navigation, manipulation,swarm ...
10/16

Robotics Club
About
Motivation
Interested?
Contact
References
Arduino
I Arduino robot
I Mega ADK (Arduino +Android), LilyPad, XBeeshield, etc.
I used in NetworkedEmbedded Systems course
11/16

Robotics Club
About
Motivation
Interested?
Contact
References
Open Projects
I control manipulator arm
I simulation for robots/drones with Gazebo
I RGBD-SLAM with Kinect
I ...
12/16

Robotics Club
About
Motivation
Interested?
Contact
References
Interested?
1. write to [email protected]
2. meet us for a short talk
3. get key card and accounts (lab, rovers, ...)
13/16

Robotics Club
About
Motivation
Interested?
Contact
References
Contact
I Julian [email protected]
I Denise [email protected]
see also our webpage:http://wiki.vmars.tuwien.ac.at/index.php/Robotics_Club
14/16

Robotics Club
About
Motivation
Interested?
Contact
References
References I
The Navigation and Control Technology Inside theAR.Drone Micro UAV, Milano, Italy, 2011.
Adept MobileRobots.Pioneer 3-AT.http://www.mobilerobots.com/ResearchRobots/P3AT.aspx, 2013.
AscTec.AscTec Pelican.http://www.asctec.de/uav-applications/research/products/asctec-pelican/, 2014.
K. Selyunin, D. Ratasich, E. Bartocci, and R. Grosu.Deep Neural Programs for Adaptive Control inCyber-Physical Systems.submitted, 2014.
15/16

Robotics Club
About
Motivation
Interested?
Contact
References
References II
M.A. Lee.CUDA on ARM: Tegra3 Based Low-Power GPU ComputeNode, 2013.Poster presented at GPU Technical Conference, 2013.
NVIDIA.NVIDIA Jetson TK1 Embedded Development Kit.http://www.nvidia.com/object/jetson-tk1-embedded-dev-kit.html, 2014.
Parrot.Parrot AR.Drone 2.0.http://ardrone2.parrot.com/, 2014.
Robot Operating System.ROS Homepage.http://www.ros.org/, 2014.
16/16











![Integrating sensor and motion models to localize an ... · Parrot AR.Drone was extended with an infrared camera to be able to follow people [7]. Because the AR.Drone is a quite recent](https://static.documents.pub/doc/80x56/5fcf77e8e783d43cac2894f4/integrating-sensor-and-motion-models-to-localize-an-parrot-ardrone-was-extended.jpg)





