Page 1
EMSODEV
E M S O D E V
EMSO implementation and operation:
DEVelopment of instrument module
Grant Agreement 676555 3 PU 1/50
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS D2.1
Document identifier: EMSODEV-D2.1_V1.0
Due Date of Delivery to EC M3 (November 2015)
Dissemination level PU
Actual Date of Delivery to EC 13/01/2016
Document date: 02/11/2015
Deliverable Title: Report On Workshop On Scientific
Requirements
Work package: WP2: Requirement definition and
specification
Lead Beneficiary: 3 - Hellenic Centre For Marine Research
Other Beneficiaries
Hellenic Centre For Marine Research, NERC,
Istituto Nazionale Di Geofisica E Vulcanologia,
Institut Français de Recherche pour
L'Exploitation de la Mer, CSIC, Marine
Institute, Unihb, IPMA, Geoecomar
Authors: Monty Priede, Paris Pagonis, Manolis
Ntoumas, George Petihakis, Vasilis Lykousis
Document status: Final
Document link: https://emdesk.eu
Ref. Ares(2016)503017 - 29/01/2016
Page 2
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 2/50
History of changes
Version Date Change Authors
1.1 02.11.2015 Preliminary issue (the first draft created) and sent to
WP2 participants
Monty Priede, Paris
Pagonis, Manolis
Ntoumas, George
Petihakis
1.2 13.11.2015 Feedback from partners incorporated and version
sent to the Executive Board of EMSODEV Paris Pagonis
1.3 25.11.2015 Revision Nadine Lanteri, Jean-
François Rolin
1.4 16.12.2015 Minor formatting and quality check Pier Luigi Franceschini
1.5 31.12.2015 Proof reading, spellcheck, and format check Mairi Best
1.6 08.01.2016 Overall check on consistency and format Laura Beranzoli
Copyright notice:
Copyright © EMSODEV
For more information on EMSODEV, its partners and contributors please see http://www.emso-eu.org/
This work is a result of the EMSODEV project that has received funding from the European Union’s Horizon 2020 research and innovation
programme under grant agreement No 676555. The publication reflects only the author’s views and the Community is not liable for any use
that may be made of the information contained therein. Neither the EMSODEV consortium as a whole, nor a certain participant of the
Page 3
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 3/50
EMSODEV consortium, warrant that the information contained in this document is appropriate for use, nor that use of the information is
free from risk, and accepts no liability for loss or damage suffered by any person using this information.
Page 4
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 4/50
TABLE OF CONTENTS
1. Executive Summary ..................................................................................................... 5
2. Introduction................................................................................................................. 5
3. Introduction to the EGIM (EMSO Generic Instrument Module) ............................... 7
4. Present situation of instruments already in place at the EMSO nodes. ................... 7
5. Scientific Parameter Requirements .......................................................................... 26
5.1 Measured Parameters ........................................................................................ 31
6. System Requirements of the EMSO nodes. .............................................................. 36
6.1 EGIM Architecture.............................................................................................. 41
6.2 Stand alone ........................................................................................................ 42
6.3 Cabled ................................................................................................................ 42
6.4 Interfaces ........................................................................................................... 43
6.5 Data storage ....................................................................................................... 43
6.6 Communication systems .................................................................................... 44
6.7 Function and control requirements ................................................................... 44
6.8 Redundancy and backup systems ...................................................................... 44
7. Off-the-shelf Instrumentation Survey and Selection ............................................... 44
8. CONCLUSIONS ........................................................................................................... 48
9. BIBLIOGRAPHY .......................................................................................................... 49
Page 5
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 5/50
1. Executive Summary
The proceedings of a meeting held in Heraklion, Greece on 23-24 September 2015 are described. The
sensors already installed on 15 operational observatories of the EMSO network are documented.
During the meeting there was agreement on seven core parameters that should be accommodated
by the EMSO Generic Instrument Module (EGIM):
• Temperature
• Conductivity
• Pressure
• Dissolved O2
• Turbidity
• Ocean currents
• Passive acoustics
Reviewing the architecture of EGIM it is anticipated that up to 5 additional ports will be available.
These can either be used to duplicate sensors or for additional optional parameters that would be
selected according to the site:
• Fluorescence /Chlorophyll-Α
• pH
• partial CO2 pressure
• partial CH4 pressure
• Imaging cameras.
It was concluded that all the core sensors should have a high technology readiness level (TRL) and are
available commercially off the shelf (COTS). EGIM ports can also be used for development and trials
of new sensors not yet at high TRL. EGIM will be designed for installation on the sea floor or in the
water column, either connected to a cable or autonomous, powered by a local battery pack. The
implications of different configurations are reviewed.
Information is collated on sensors required for the EGIM nodes, how they can be integrated into the
EGIM package and the availability of sensors commercially off the shelf.
2. Introduction
A workshop was convened during 23-24 September 2015 in Heraklion to meet the following
objectives as stated in the contract.
D2.1: Workshop on Scientific Requirements (M3): In the framework of Task 2.2 a workshop will be
dedicated to update the generic parameter list. The needs of scientists and public/private users, the
present situation in terms of sensors already in place in the various nodes as well as the sensor
maturity will be discussed and documented.
Task 2.2 Scientific Parameter Requirements [M1 – M3]
Page 6
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 6/50
This task will update the generic parameter requirements according to the scientific, public and
private user community needs. It will be based on what is already in place at different sites plus new
developments that are feasible within the time frame of the project. The performance of candidate
sensors will be validated (QC/QA from ESONET and EMSO PP) against the experience of a larger
community (EMSO ERIC present and future partners, ESONET-Vision ASBL), through a dedicated
workshop. The low level engineering data formats, time stamping, metadata, sensor metadata in
terms of how they affect multiplexing within the EGIM will be collated to enable incorporation into
practical design proposals. Necessary calibration procedures will be defined. An initial list of
parameters could be enriched with additional parameters including pCO2, pH, pCH4, and Chlorophyll.
This could be considered in case of specific needs and opportunities identified during the project
lifecycle and based on additional national funds obtained by the observatory owners.
The agenda and the list of participants are both given in the appendix.
The discussion in the meeting was structured in three parts related to the tasks to be carried out in
WP2.
Session 1. Scientific Parameter Requirements (Task 2.2.)
Session 2. System Requirements of the EMSO nodes (Task 2.1)
Session 3. Off-the-shelf Instrumentation Survey and Selection (Task 2.3)
Rather than simply updating the generic parameters list this enabled the meeting to fully consider
the implications of any sensor choice in terms of the system requirements to create the integrated
EGIM package and whether the sensors are indeed commercially available.
For each session a plenary speaker presented an overview of the topic and this was followed by
structured discussion. Additional material not available at the time of the meeting was collated
afterwards in order to prepare this report through correspondence, ad hoc meetings and further
research.
Page 7
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 7/50
3. Introduction to the EGIM (EMSO Generic Instrument Module)
EGIM is a key component of EMSO (European Multidisciplinary Seafloor and water-column
Observatory) that has installed an expanding network of observatories in the seas around Europe
equipped with multiple sensors monitoring a range of environmental parameters.
Hitherto these observatories have used a variety of ad hoc or pre-existing solutions to configure the
sensor suites and retrieve data back to shore. EGIM is a hardware and software module that
integrates a standard suite of sensors into a package that can be deployed at the different locations.
This will have advantages of improving comparability of data between stations, decreasing costs,
improving reliability and accelerating implementation of the full network. The same core variables
will be measured at the different stations in the most similar way feasible and EGIM will allow
additional site-specific or mission-specific sensors to be added.
EGIM will provide everything required by the sensors to ensure best measurement quality and long -
term reliability. The sensors will be mounted in an optimal operational configuration with energy
distribution, control, time stamping, measurement sequencing and data handling. Optional hardware
and software interfaces will allow EGIM to be used in different ways:
A. Attached to a sea floor cable for real-time data transmission and electrical power.
B. Attached to a stand-alone node providing on-board battery and data storage.
Intermittent data link to shore.
C. Sea floor, surface buoy or water column location.
4. Present situation of instruments already in place at the EMSO nodes.
The previous paragraph gave a brief description on what an EGIM module is and where the module is
going to be deployed. It is therefore necessary to give more specific information on each of the
fifteen (15) EMSO sites (Figure 1) and especially the current instrumentation used for collecting
scientific data. The following paragraphs refer to each EMSO node and the respective tables including
the present instrumentation load of each node with information on the location and depth.
Description of sites and information on instrumentation can be found at http://www.emso-
eu.org/infrastructure/emso-sites-description.html; http://www.fixo3.eu/observatory/, FixO3 deliverable D2.2,
D7.2; Multidisciplinary Oceanic Information SysTem (MOIST http://www.moist.it); EMSO France
(http://www.emso-fr.org/), ESONET NoE (http://www.esonet-noe.org/); Statoil / Havforskningsinstituttet Ocean
Observatory (http://love.statoil.com/Documentation); Hypox D6.1 (http://hypox.pangaea.de/); Aanderaa
application Support package #5: The Koljoefjord Observatory.
Page 8
Grant Agreement 676555
Fram Strait (Arctic) 79.0°N 04.0°
Description:
An array of up to 17 moorings has been maintained in Fram
jointly operated by the Norwegian Polar Institute, which maintains moorings in the Arctic outflow
in eastern Fram Strait, and the Alfred Wegener Institute, which maintains moorings in the Atlantic
inflow in eastern Fram Strait. Moorings and long
Surface and Midwater
Hosting: Oceanographic and sediment
Annual ship operations are used for sensor installation, maintenance and data dow
time communication projected).
Measurements and sampling: CTD, water sampling, plankton hauls, detection of zooplankton by
optical systems like LOKI (Lightframe On
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
3 PU
Figure 1. EMSO node locations
°E Depth range: 1000-5500 m
An array of up to 17 moorings has been maintained in Fram Strait since the 1990s. The array is
jointly operated by the Norwegian Polar Institute, which maintains moorings in the Arctic outflow
in eastern Fram Strait, and the Alfred Wegener Institute, which maintains moorings in the Atlantic
m Strait. Moorings and long-term lander systems since 2000.
Hosting: Oceanographic and sediment-trap moorings can host additional autonomous systems.
Annual ship operations are used for sensor installation, maintenance and data dow
time communication projected).
Measurements and sampling: CTD, water sampling, plankton hauls, detection of zooplankton by
optical systems like LOKI (Lightframe On-sight key-species Investigation).
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
PU 8/50
Strait since the 1990s. The array is
jointly operated by the Norwegian Polar Institute, which maintains moorings in the Arctic outflow
in eastern Fram Strait, and the Alfred Wegener Institute, which maintains moorings in the Atlantic
term lander systems since 2000.
trap moorings can host additional autonomous systems.
Annual ship operations are used for sensor installation, maintenance and data download (real-
Measurements and sampling: CTD, water sampling, plankton hauls, detection of zooplankton by
Page 9
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 9/50
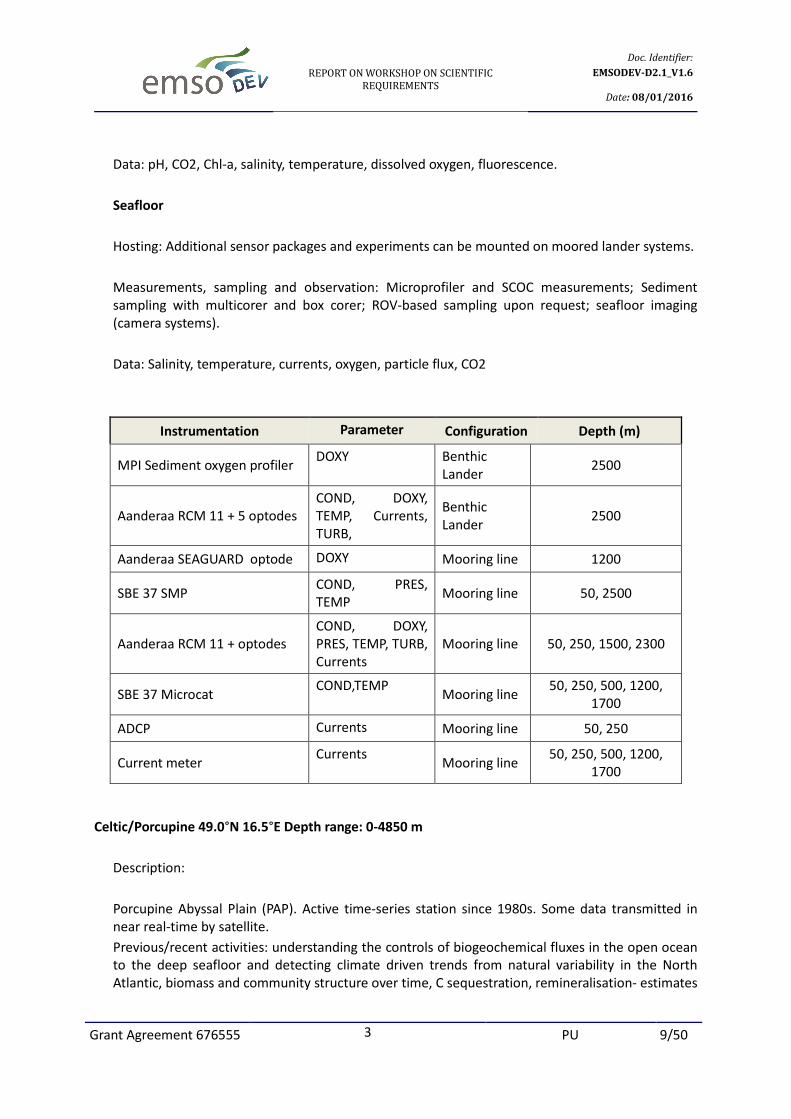
Data: pH, CO2, Chl-a, salinity, temperature, dissolved oxygen, fluorescence.
Seafloor
Hosting: Additional sensor packages and experiments can be mounted on moored lander systems.
Measurements, sampling and observation: Microprofiler and SCOC measurements; Sediment
sampling with multicorer and box corer; ROV-based sampling upon request; seafloor imaging
(camera systems).
Data: Salinity, temperature, currents, oxygen, particle flux, CO2
Instrumentation Parameter Configuration Depth (m)
MPI Sediment oxygen profiler DOXY Benthic
Lander 2500
Aanderaa RCM 11 + 5 optodes
COND, DOXY,
TEMP, Currents,
TURB,
Benthic
Lander 2500
Aanderaa SEAGUARD optode DOXY Mooring line 1200
SBE 37 SMP COND, PRES,
TEMP Mooring line 50, 2500
Aanderaa RCM 11 + optodes
COND, DOXY,
PRES, TEMP, TURB,
Currents
Mooring line 50, 250, 1500, 2300
SBE 37 Microcat COND,TEMP
Mooring line 50, 250, 500, 1200,
1700
ADCP Currents Mooring line 50, 250
Current meter Currents
Mooring line 50, 250, 500, 1200,
1700
Celtic/Porcupine 49.0°N 16.5°E Depth range: 0-4850 m
Description:
Porcupine Abyssal Plain (PAP). Active time-series station since 1980s. Some data transmitted in
near real-time by satellite.
Previous/recent activities: understanding the controls of biogeochemical fluxes in the open ocean
to the deep seafloor and detecting climate driven trends from natural variability in the North
Atlantic, biomass and community structure over time, C sequestration, remineralisation- estimates
Page 10
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 10/50
of respiration understanding the effect of episodic events, trace pulse events from climate and
surface ocean to seafloor influences, contribute in situ data to understanding of global change.
The PAP observatory lies south of the main stream of the North Atlantic Current and is subject to
return flows from this coming from the West and Northwest. An intermittent stream of cyclonic
and anticyclonic mesoscale eddies cross the site extending sometimes several thousand meters
into the water column. The winter condition at the site is of a mixed layer as deep as 800m driven
by thermally driven convective overturning although throughout the winter there are short
periods of stability during which the mixed layer may only be a few tens of meters thick.
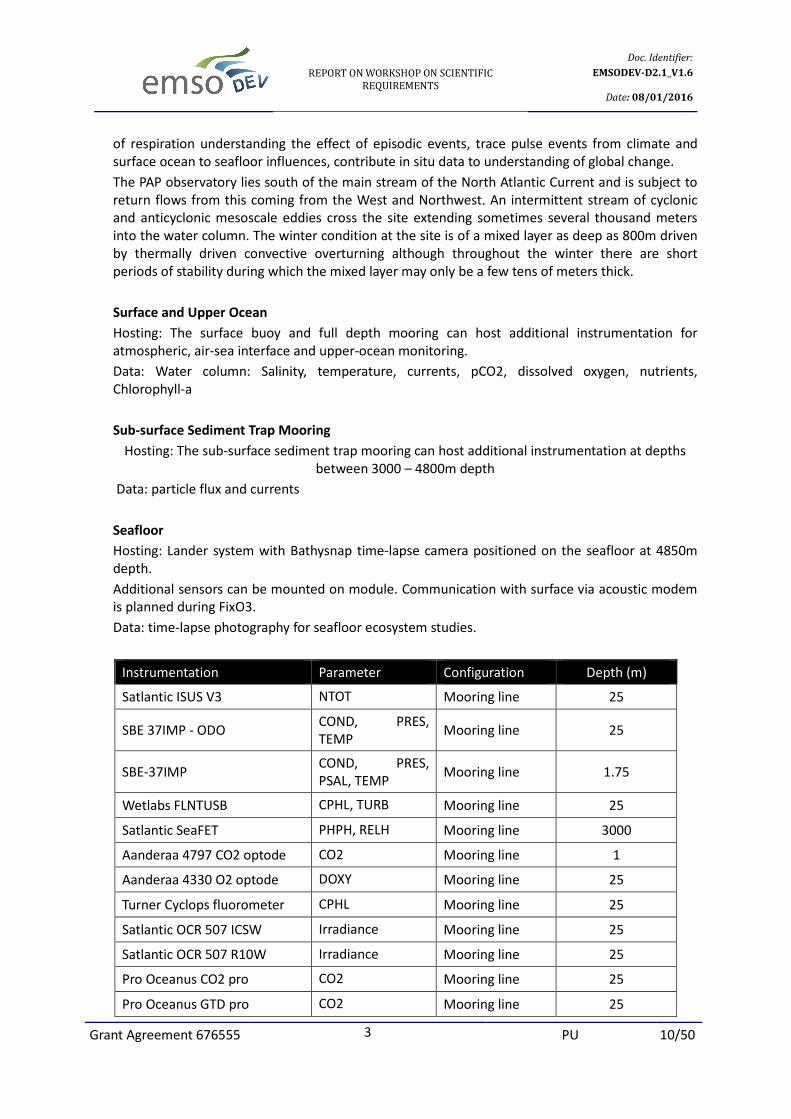
Surface and Upper Ocean
Hosting: The surface buoy and full depth mooring can host additional instrumentation for
atmospheric, air-sea interface and upper-ocean monitoring.
Data: Water column: Salinity, temperature, currents, pCO2, dissolved oxygen, nutrients,
Chlorophyll-a
Sub-surface Sediment Trap Mooring
Hosting: The sub-surface sediment trap mooring can host additional instrumentation at depths
between 3000 – 4800m depth
Data: particle flux and currents
Seafloor
Hosting: Lander system with Bathysnap time-lapse camera positioned on the seafloor at 4850m
depth.
Additional sensors can be mounted on module. Communication with surface via acoustic modem
is planned during FixO3.
Data: time-lapse photography for seafloor ecosystem studies.
Instrumentation Parameter Configuration Depth (m)
Satlantic ISUS V3 NTOT Mooring line 25
SBE 37IMP - ODO COND, PRES,
TEMP Mooring line 25
SBE-37IMP COND, PRES,
PSAL, TEMP Mooring line 1.75
Wetlabs FLNTUSB CPHL, TURB Mooring line 25
Satlantic SeaFET PHPH, RELH Mooring line 3000
Aanderaa 4797 CO2 optode CO2 Mooring line 1
Aanderaa 4330 O2 optode DOXY Mooring line 25
Turner Cyclops fluorometer CPHL Mooring line 25
Satlantic OCR 507 ICSW Irradiance Mooring line 25
Satlantic OCR 507 R10W Irradiance Mooring line 25
Pro Oceanus CO2 pro CO2 Mooring line 25
Pro Oceanus GTD pro CO2 Mooring line 25
Page 11
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 11/50
Osmo sampler Mooring line 3050
Wetlabs Cycl –P Phosphate
analyser
PHOS Mooring line 25
Pro Oceanus CO2 pro CO2 Buoy 25
Satlantic OCR 507 ICSA Irradiance Buoy 25
Satlantic SeaFET pH PHPH Buoy 25
Star-oddi CTD COND, PRES,
TEMP Mooring line 25
Aanderaa RCM 30m ADCP Currents Mooring line 1
Bathysnap Images Benthic Lander 4800
Azores Islands 37.5°N 33.0°W Depth range: 1700
Description:
The Lucky Strike EMSO-Azores observatory is devoted to the integrated study of mid-ocean ridge
processes, from the subseafloor to the water column. It is set atop an active volcano, which hosts
one of the largest active ridge hydrothermal vent sites. The main scientific objectives are:
• to study hydrothermal heat and chemical fluxes to the ocean in relation with seismicity, volcanic
activity and ground deformation at a diverging plate boundary.
• to study the impact of telluric, climatic and anthropogenic changes on deep seafloor ecosystems
and hydrothermal communities.
• to study the dynamics of water masses in relation to the steep axial valley topography, and their
impact on the dispersion of hydrothermal effluents.
• site active for more than a decade.
The site has three (3) submarine nodes linked to a surface buoy with hydro acoustic modems. The
nodes are:
• SeaMoN West:
This is the station moored in the lava lake. It serves the local set of sensors and provides bi-
directional acoustic communication with the surface buoy. SeaMoN West is dedicated to
geophysical observations.
• SeaMoN East:
This is the station positioned at the base of the Tour Eiffel active edifice. It serves the local set of
sensors and provides bi-directional acoustic communication with the surface buoy. SeaMoN East is
the EMSO-Azores ecological node.
• Locean mooring
Page 12
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 12/50
Instrumentation Parameter Configuration Depth (m)
Geodesy GPS Coordinates, alt.,
geoide height BOREL buoy
Meteorological station
Wind speed,
direction, Tre,
pressure
BOREL buoy
Iridium GPS Coordinates BOREL buoy
Aanderaa 3830 O2 optode DOXY SeaMon East
Seabed platform 1695
Temperature TEMP SeaMon West
Seabed platform 1695
Pressure PRESS SeaMon West
Seabed platform 1695
Broad Band Seismometer Seismic SeaMon West
Seabed platform 1695
Ifremer CHEMINI Fe Iron Analyser SeaMon East
Seabed platform 1695
Ifremer SMOOVE Video
Equipment
Images SeaMon East
Seabed platform 1695
Wetlabs ECO BBRTD TURB SeaMon East
Seabed platform 1695
Microcat Cond., Press., Tre LOCEAN mooring 1688, 1000
Aquadopp Currents
LOCEAN mooring 1686
PLOCAN 29.17°N 15.5°W Depth range: 50-3670 m
Description:
ESTOC/PLOCAN - European Station for time-series on the ocean, operating since 1994
A multidisciplinary mooring, located in the Central Eastern Atlantic, open ocean site with over 15
years of continuous surface and mid-water meteorological, physical and biogeochemical monitoring
PLOCAN will also be starting to operate a scientific offshore platform on the East Coast of Gran
Canaria. ESTOC will benefit from the platform day-to-day operations. The planning of seafloor
monitoring is programmed although currently at requirement stage. It is anticipated that as a
minimum, either open ports or spaces will be made available at the seafloor.
Page 13
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 13/50
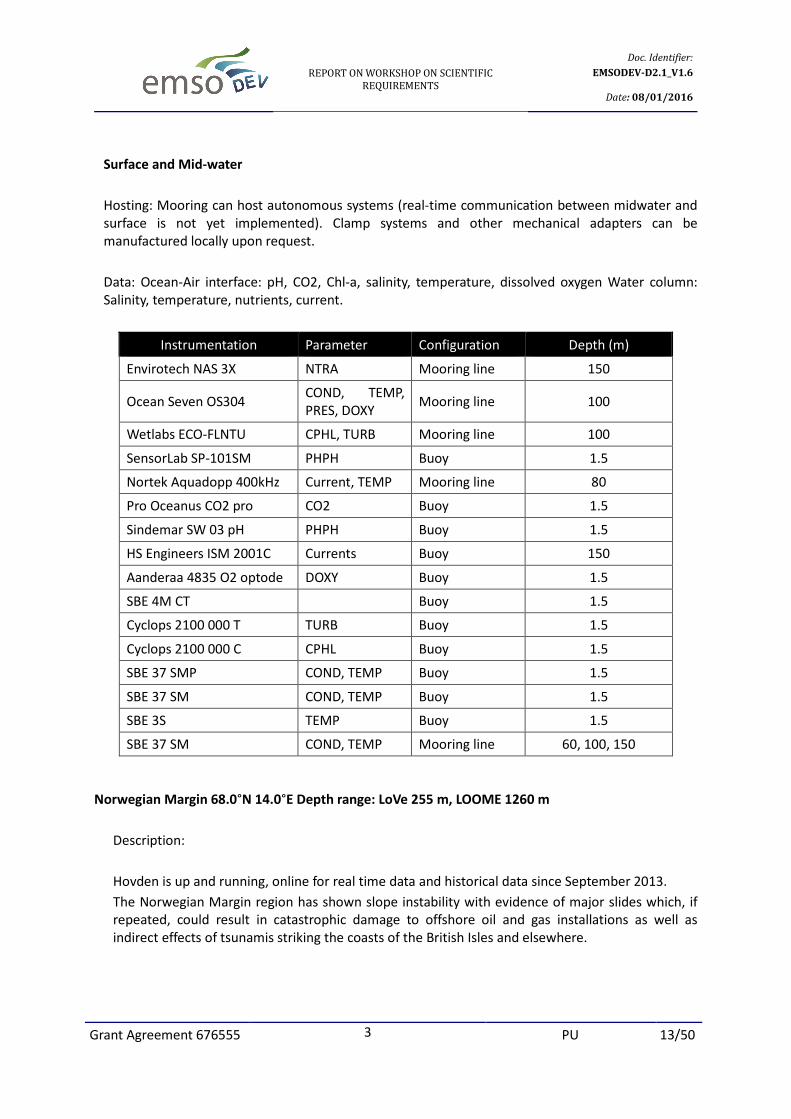
Surface and Mid-water
Hosting: Mooring can host autonomous systems (real-time communication between midwater and
surface is not yet implemented). Clamp systems and other mechanical adapters can be
manufactured locally upon request.
Data: Ocean-Air interface: pH, CO2, Chl-a, salinity, temperature, dissolved oxygen Water column:
Salinity, temperature, nutrients, current.
Instrumentation Parameter Configuration Depth (m)
Envirotech NAS 3X NTRA Mooring line 150
Ocean Seven OS304 COND, TEMP,
PRES, DOXY Mooring line 100
Wetlabs ECO-FLNTU CPHL, TURB Mooring line 100
SensorLab SP-101SM PHPH Buoy 1.5
Nortek Aquadopp 400kHz Current, TEMP Mooring line 80
Pro Oceanus CO2 pro CO2 Buoy 1.5
Sindemar SW 03 pH PHPH Buoy 1.5
HS Engineers ISM 2001C Currents Buoy 150
Aanderaa 4835 O2 optode DOXY Buoy 1.5
SBE 4M CT Buoy 1.5
Cyclops 2100 000 T TURB Buoy 1.5
Cyclops 2100 000 C CPHL Buoy 1.5
SBE 37 SMP COND, TEMP Buoy 1.5
SBE 37 SM COND, TEMP Buoy 1.5
SBE 3S TEMP Buoy 1.5
SBE 37 SM COND, TEMP Mooring line 60, 100, 150
Norwegian Margin 68.0°N 14.0°E Depth range: LoVe 255 m, LOOME 1260 m
Description:
Hovden is up and running, online for real time data and historical data since September 2013.
The Norwegian Margin region has shown slope instability with evidence of major slides which, if
repeated, could result in catastrophic damage to offshore oil and gas installations as well as
indirect effects of tsunamis striking the coasts of the British Isles and elsewhere.
Page 14
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 14/50
LOOME:
Investigation of the temporal variability at an active gas emitting mud volcano covering the
sequence of events before, during, and after an eruption; analysis of their effects on gas hydrate
stability, seafloor morphology and the distribution and colonization patterns of benthic
communities. The Snøhvit gas production field in the Barents Sea operated by Statoil is equipped
with a junction capacity for a scientific monitoring node in water depths of 250-345m
Research: particular interests are detection of subsea leaks of natural gas and possible leaks of
CO2 with an array of instruments, aimed to measure downwards (geo-acoustics, deep T
measurements), surface phenomena (T-strings and sensors measuring DOXY, pH and ORP), and
sensors for the water column (turbidity, pressure, T, salinity, DOXY, and gasflares by scanning
sonar), camera.
LoVe:
Still camera, conductivity, compass, chlorophyll, turbidity, depth, acoustic backscatter, passive
acoustics. This is a cabled observatory.
Instrumentation Parameter Configuration Depth (m)
Aanderaa RCM 11
DOXY Benthic Lander 1260
PHPH Benthic Lander 1260
TEMP Benthic Lander 1260
Redox Benthic Lander 1260
Currents Mooring line 1257.5
DOXY, COND, TURB Mooring line 1257.5
COND, TEMP Mooring line 1258.5
DOXY, COND, TEMP Mooring line 1259.5
Geophones (OBS) Seismic Benthic Lander 1260
Simrad EK60 70 kHz Acoustic backscatter Seabed Platform 255
Simrad ES70 -CD Acoustic backscatter Seabed Platform 255
Nortek Long ranger
ADCP
Currents Seabed Platform 255
Nortek 600 kHz ADCP Currents Seabed Platform 255
METAS DSF5210 camera Images Seabed Platform 255
METAS DSF 4365 lights Seabed Platform 255
Ocean sonic SB35 ETH
10 – 200000 Hz
Passive acoustics Seabed Platform 255
Seapoint CPHL, TURB Seabed Platform 255
Aanderaa 4112A optode TURB Seabed Platform 255
Aanderaa 4117D PRES Seabed Platform 255
Aanderaa 4319A COND Seabed Platform 255
Page 15
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 15/50
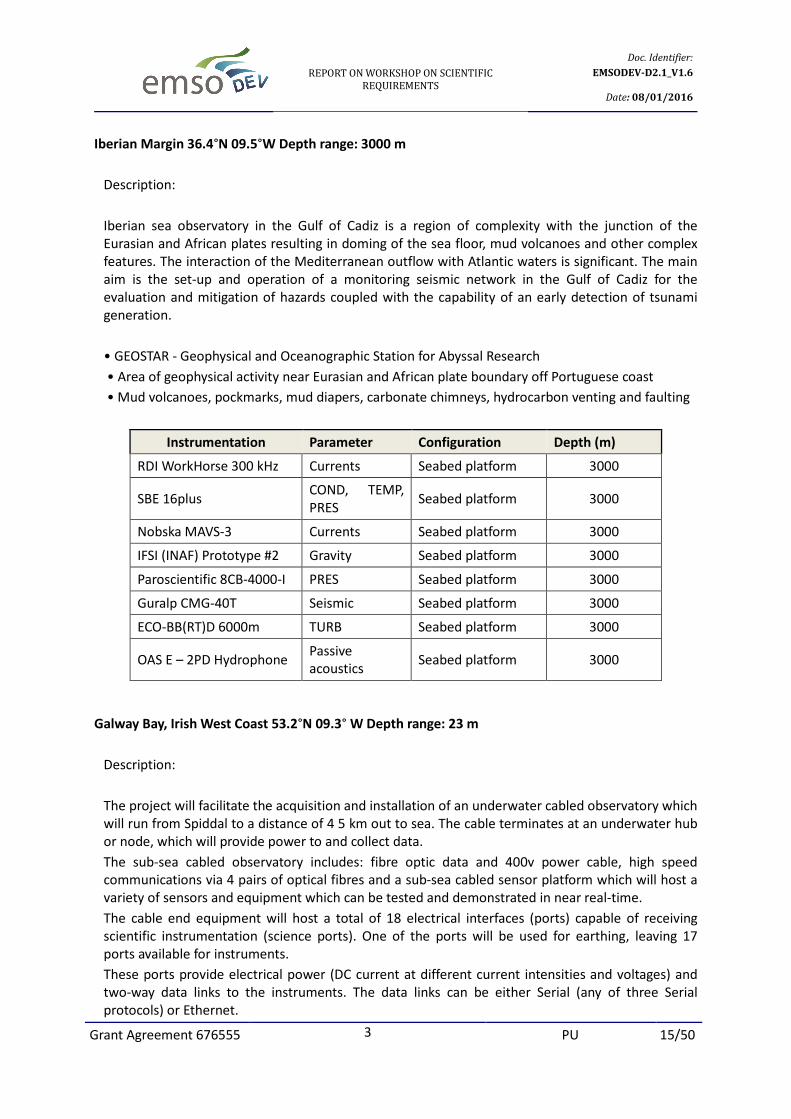
Iberian Margin 36.4°N 09.5°W Depth range: 3000 m
Description:
Iberian sea observatory in the Gulf of Cadiz is a region of complexity with the junction of the
Eurasian and African plates resulting in doming of the sea floor, mud volcanoes and other complex
features. The interaction of the Mediterranean outflow with Atlantic waters is significant. The main
aim is the set-up and operation of a monitoring seismic network in the Gulf of Cadiz for the
evaluation and mitigation of hazards coupled with the capability of an early detection of tsunami
generation.
• GEOSTAR - Geophysical and Oceanographic Station for Abyssal Research
• Area of geophysical activity near Eurasian and African plate boundary off Portuguese coast
• Mud volcanoes, pockmarks, mud diapers, carbonate chimneys, hydrocarbon venting and faulting
Instrumentation Parameter Configuration Depth (m)
RDI WorkHorse 300 kHz Currents Seabed platform 3000
SBE 16plus COND, TEMP,
PRES Seabed platform 3000
Nobska MAVS-3 Currents Seabed platform 3000
IFSI (INAF) Prototype #2 Gravity Seabed platform 3000
Paroscientific 8CB-4000-I PRES Seabed platform 3000
Guralp CMG-40T Seismic Seabed platform 3000
ECO-BB(RT)D 6000m TURB Seabed platform 3000
OAS E – 2PD Hydrophone Passive
acoustics Seabed platform 3000
Galway Bay, Irish West Coast 53.2°N 09.3° W Depth range: 23 m
Description:
The project will facilitate the acquisition and installation of an underwater cabled observatory which
will run from Spiddal to a distance of 4 5 km out to sea. The cable terminates at an underwater hub
or node, which will provide power to and collect data.
The sub-sea cabled observatory includes: fibre optic data and 400v power cable, high speed
communications via 4 pairs of optical fibres and a sub-sea cabled sensor platform which will host a
variety of sensors and equipment which can be tested and demonstrated in near real-time.
The cable end equipment will host a total of 18 electrical interfaces (ports) capable of receiving
scientific instrumentation (science ports). One of the ports will be used for earthing, leaving 17
ports available for instruments.
These ports provide electrical power (DC current at different current intensities and voltages) and
two-way data links to the instruments. The data links can be either Serial (any of three Serial
protocols) or Ethernet.
Page 16
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 16/50
The CEE (Cable End Equipment) will also host a total of 4 electro-optical interfaces, and one coaxial
interface (reserved for video).
The cable will also host an acoustic array on one of the optical ports; this array will incorporate 18
hydrophones (6 hydrophone lines with 3 hydrophones per line), over 2km of cable transmitting
nearly 200 Mbps of data.
The observatory started its operation in August 2015.
Currently there are 12 spare ports designed into the sub-sea monitoring station(s) to allow for the
testing, demonstration and validation of novel marine sensors.
There is a planned installation for May 2016 adding two (2) more sensors:
• Seabird SBE 16plus (COND, TEMP, PRES)
• Seabird SBE 43 (DOXY)
Instrumentation Parameter Configuration Depth (m)
RDI Teledyne ADCP 600kHz Currents Seabed platform 23
Wetlabs ECO FLNTU CPHL, TURB Seabed platform 23
OceanSonics icListen HF Passive acoustics Seabed platform 23
Kongsberg OE14-522 Images Seabed platform 23
Idronaut Ocean Seven 304Plus COND, TEMP, PRES Seabed platform 23
Iroise Sea - Molene Island 48.5°N 04.9°W Depth range: 20 m
Description:
EMSO-Molène is a cabled observatory dedicated to long term and high-resolution monitoring of
coastal biodiversity and biomass. It is also a testing site for sensor and equipment in situ
qualification.
On 13 June 2012 the pilot cabled observatory was launched off the Island of Molene, some 7
nautical miles off the coast of Brittany. The cable extended 2 km offshore from the landing point to
an undersea node providing broad communication and power to an array of sensors including
acoustics, current meters, underwater HD cameras and environmental parameters.
Instrumentation Parameter Configuration Depth (m)
Fluorometer CPHL Seabed platform 18
CTD COND, TEMP, PRES Seabed platform 18
Hydrophone Passive acoustic Seabed platform 18
Nortek Aquadopp profiler 1Mhz Currents Seabed platform 18
Ifremer F8842 Video Camera Images Seabed platform 18
Aanderaa O2 Optode DOXY Seabed platform 18
Page 17
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 17/50
Ligurian Sea 42.8°N 06.17°E Depth range: 50, 1000, 2350, 2500 m
Description:
Specific conditions make the Ligurian site unique location for a multidisciplinary long-term eulerian
monitoring. Scientific features are:
• Slope failure processes on a steep continental slope
• Turbidity currents in submarine canyons and their force factors
• Seismic hazard, tsunami generation and the impact of seismicity on continental slope stability
• Marine biodiversity and life in deep oceanic environments
• Lateral and vertical dynamics of water masses and their impact on biochemical budgets
• Fluxes of organic matter through the water column, their impact on regional carbon budgets
The EMSO Ligurian cabled and buoyed observatory infrastructures are:
• ODAS Côte d'Azur buoy, presently operated by Météo France.
• Var canyon experiment.
• DYFAMED long term mooring.
• EMSO-Nice cabled observatory.
• SJB cabled add on extension to the neutrino telescope ANTARES to be moved to MEUST in
2017.
• ALBATROSS additional extension to the neutrino telescope moved from ANTARES to MEUST.
Instrumentation Parameter Configuration Depth (m)
Guralp CMG 3T seismometer Seismic Seabed platform 2400
RDI ADCP Currents Seabed platform 2400
Aanderaa 3830 O2 optode DOXY Seabed platform 1925
SBE 37 SMP COND, PRES,
TEMP Seabed platform 2200, 2300
Aanderaa 3830 O2 optode DOXY Mooring line 2300
IODA6000 O2 DOXY Mooring line 2000
SBE 37 ODO COND, TEMP,
PRES Mooring line 350, 2000
Satlantic ISUSv3 Nitrate/UV NTOT Buoy 50
SBE 37 SMP
COND, TEMP,
PRES Mooring line
200, 350, 700,
1000, 1500,
2000
Nortek Aquadopp 3000 Currents Mooring line 200, 1000
Page 18
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 18/50
Western Ionian 37.5°N 15.4°E Depth range: 2000 m
Description:
NEMO-SN1 and OnDE seafloor observatories:
• Cabled to laboratory in harbour of Catania by electro-optical cable. Operating in real time
since 2005.
In Western Ionian Sea (2100 m depth, 25 km off-shore the harbour of Catania) a cabled deep-sea
observatory was set up and is operational in real time since 2005: the cabled deep-sea multi-
parameter station NEMO-SN1 (@TSN branch), equipped with geophysical and environmental
sensors and the cabled NEMO-OνDE station (@TSS branch), equipped with 4 wide-band
hydrophones.
The site infrastructure consists of a shore laboratory, a 28 km long electro-optical cable connecting
the shore lab to the deep-sea lab. The shore laboratory hosts the land termination of the cable, the
on-shore data acquisition system and power supplies for underwater instrumentation.
In early 2016 a recently built junction box will be deployed at TSN. The junction box will provide
four electro-optical ROV operable connectors available for hosting new stations, providing fibre-
optic Ethernet connections to shore and 300 VDC power supply. Users may use electro-optical
jumpers to mate with the junction box that are already available. The junction box includes an
acoustic modem (connected to a ROV mateable connector for servicing) that will provide a real-time
link to an instrumented mooring line deployed nearby to measure water-column parameters. The
same acoustic modem could be useful to link to other devices.
Seafloor
Hosting: NEMO-SN1 modules have spare connectors to host other systems for long term real-time
data acquisition. The TSN cable branch has 2 conductors and 4 fibres directly connected to shore,
the TSS branch has 4 conductors and 6 fibres.
Data: temperature, conductivity, pressure, punctual vector current speed, current profile, seismics,
acoustics, magnetics, gravity
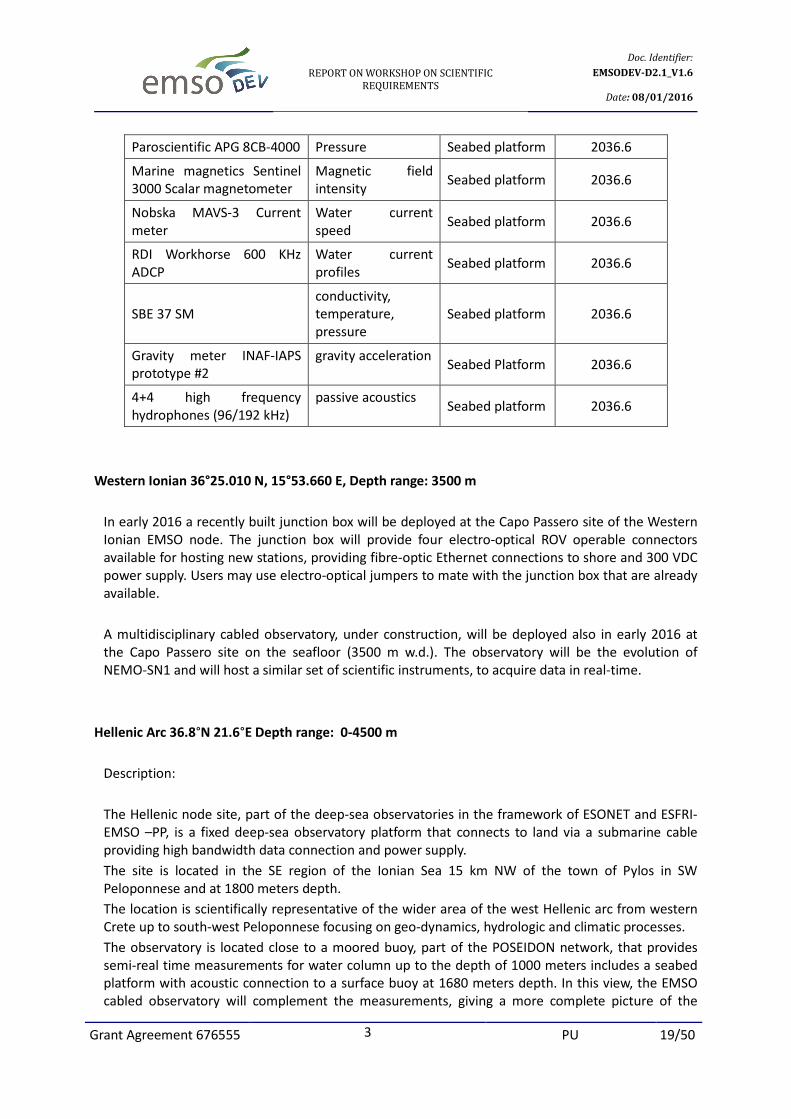
Instrumentation Parameter Configuration Depth (m)
Vectorial Magnetometer Magnetic field Seabed platform 2036.6
Guralp CMG 1T Seismic
(Broadband) Seabed platform 2036.6
E – 2PD Seismic hydrophone Passive acoustics Seabed platform 2036.6
SCRIPPS UCSD DPG
Differential Pressure
Pressure Seabed platform 2036.6
SMID DT-405D(V)1 Seismic
hydrophone
Passive acoustics Seabed platform 2036.6
LandMark10 Accelerometer Acceleration Seabed platform 2036.6
Page 19
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 19/50
Paroscientific APG 8CB-4000 Pressure Seabed platform 2036.6
Marine magnetics Sentinel
3000 Scalar magnetometer
Magnetic field
intensity Seabed platform 2036.6
Nobska MAVS-3 Current
meter
Water current
speed Seabed platform 2036.6
RDI Workhorse 600 KHz
ADCP
Water current
profiles Seabed platform 2036.6
SBE 37 SM
conductivity,
temperature,
pressure
Seabed platform 2036.6
Gravity meter INAF-IAPS
prototype #2
gravity acceleration Seabed Platform 2036.6
4+4 high frequency
hydrophones (96/192 kHz)
passive acoustics Seabed platform 2036.6
Western Ionian 36°25.010 N, 15°53.660 E, Depth range: 3500 m
In early 2016 a recently built junction box will be deployed at the Capo Passero site of the Western
Ionian EMSO node. The junction box will provide four electro-optical ROV operable connectors
available for hosting new stations, providing fibre-optic Ethernet connections to shore and 300 VDC
power supply. Users may use electro-optical jumpers to mate with the junction box that are already
available.
A multidisciplinary cabled observatory, under construction, will be deployed also in early 2016 at
the Capo Passero site on the seafloor (3500 m w.d.). The observatory will be the evolution of
NEMO-SN1 and will host a similar set of scientific instruments, to acquire data in real-time.
Hellenic Arc 36.8°N 21.6°E Depth range: 0-4500 m
Description:
The Hellenic node site, part of the deep-sea observatories in the framework of ESONET and ESFRI-
EMSO –PP, is a fixed deep-sea observatory platform that connects to land via a submarine cable
providing high bandwidth data connection and power supply.
The site is located in the SE region of the Ionian Sea 15 km NW of the town of Pylos in SW
Peloponnese and at 1800 meters depth.
The location is scientifically representative of the wider area of the west Hellenic arc from western
Crete up to south-west Peloponnese focusing on geo-dynamics, hydrologic and climatic processes.
The observatory is located close to a moored buoy, part of the POSEIDON network, that provides
semi-real time measurements for water column up to the depth of 1000 meters includes a seabed
platform with acoustic connection to a surface buoy at 1680 meters depth. In this view, the EMSO
cabled observatory will complement the measurements, giving a more complete picture of the
Page 20
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 20/50
processes from sea-surface to sea-bottom and underlying layers. The location is only a few
kilometres far from the deepest point of the Mediterranean basin.
Surface and water column
Hosting: Buoy can host additional instrumentation for atmospheric and air-sea interface parameters.
Mooring can host both real-time as well as autonomous systems.
Seafloor
Hosting: Systems can be mounted on seabed lander. Communication with surface via acoustic
modem for the existing sensors and possibly for additional systems (depending on configuration
and technical requirements). One (1) free serial EIA 232 ports @ 12 VDC up to 1 amp, one (1) free
port on SEAGURD module for an optode sensor.
The cable seabed platform will have one (1) spare ODI wet mateable connector with 4 FO @ 380
VDC at the CTA and four (4) spare EIA232 connectors @ 12, 24, 48 VDC on the platform itself.
Instrumentation Parameter Configuration Depth (m)
Aanderaa 3919A C, T COND, TEMP Buoy 1
Nortek Aquadopp 2 MHz Currents
Buoy 1
SBE IM 16plus SEACAT V2 COND, TEMP, PRES Mooring line 20
Wetlabs FLRLTD
Fluorometer
CPHL Mooring line 20
SBE 63 Oximeter DOXY Mooring line 20
SBE IM 16plus SEACAT V2 COND, TEMP, PRES Mooring line 50
Wetlabs FLRLTD
Fluorometer
CPHL Mooring line 50
SBE 63 Oximeter DOXY Mooring line 50
SBE IM 16plus SEACAT COND, TEMP, PRES Mooring line 75
Wetlabs FLNTUS
Nephelometer,
Fluorometer
CPHL, TURB
Mooring line 75
Aanderaa O2 3975 optode DOXY Mooring line 75
SBE IM 16plus SEACAT COND, TEMP, PRES Mooring line 100
Wetlabs FLNTUS
Nephelometer,
Fluorometer
CPHL, TURB
Mooring line 100
Aanderaa O2 3975 optode DOXY Mooring line 100
SBE 37 IM CT COND, TEMP, PRES Mooring line 250
Page 21
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 21/50
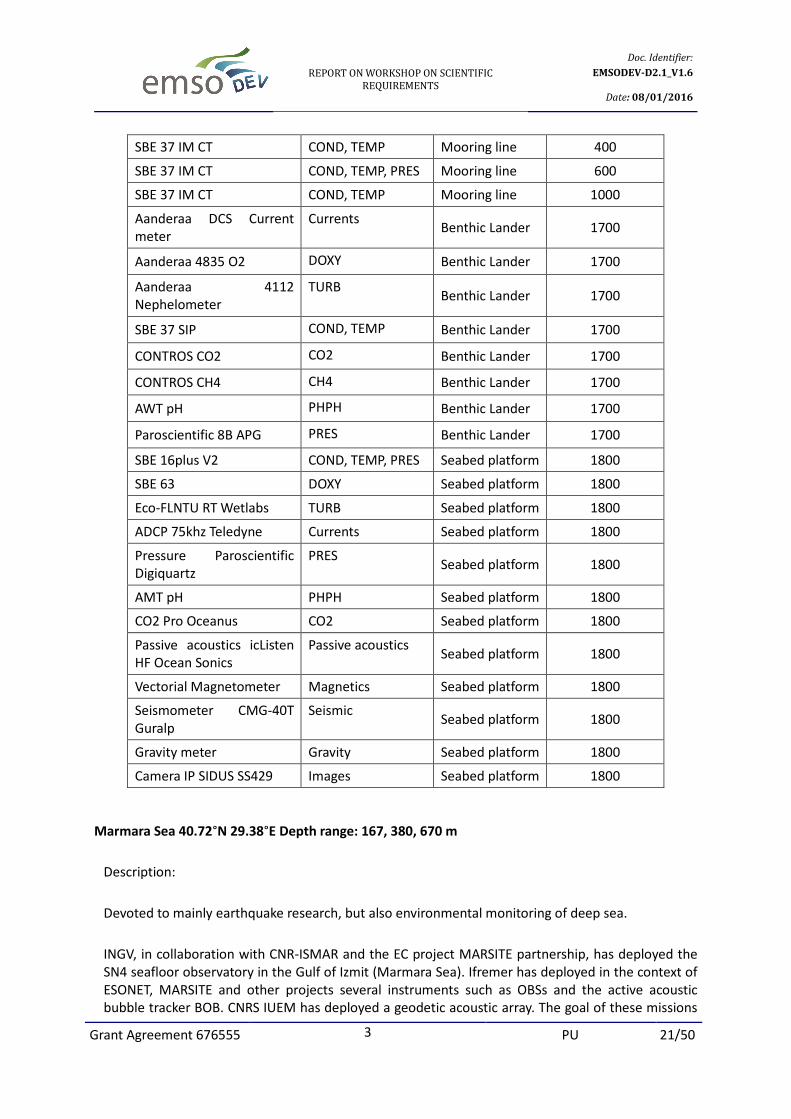
SBE 37 IM CT COND, TEMP Mooring line 400
SBE 37 IM CT COND, TEMP, PRES Mooring line 600
SBE 37 IM CT COND, TEMP Mooring line 1000
Aanderaa DCS Current
meter
Currents Benthic Lander 1700
Aanderaa 4835 O2 DOXY Benthic Lander 1700
Aanderaa 4112
Nephelometer
TURB Benthic Lander 1700
SBE 37 SIP COND, TEMP Benthic Lander 1700
CONTROS CO2 CO2 Benthic Lander 1700
CONTROS CH4 CH4 Benthic Lander 1700
AWT pH PHPH Benthic Lander 1700
Paroscientific 8B APG PRES Benthic Lander 1700
SBE 16plus V2 COND, TEMP, PRES Seabed platform 1800
SBE 63 DOXY Seabed platform 1800
Eco-FLNTU RT Wetlabs TURB Seabed platform 1800
ADCP 75khz Teledyne Currents Seabed platform 1800
Pressure Paroscientific
Digiquartz
PRES Seabed platform 1800
AMT pH PHPH Seabed platform 1800
CO2 Pro Oceanus CO2 Seabed platform 1800
Passive acoustics icListen
HF Ocean Sonics
Passive acoustics Seabed platform 1800
Vectorial Magnetometer Magnetics Seabed platform 1800
Seismometer CMG-40T
Guralp
Seismic Seabed platform 1800
Gravity meter Gravity Seabed platform 1800
Camera IP SIDUS SS429 Images Seabed platform 1800
Marmara Sea 40.72°N 29.38°E Depth range: 167, 380, 670 m
Description:
Devoted to mainly earthquake research, but also environmental monitoring of deep sea.
INGV, in collaboration with CNR-ISMAR and the EC project MARSITE partnership, has deployed the
SN4 seafloor observatory in the Gulf of Izmit (Marmara Sea). Ifremer has deployed in the context of
ESONET, MARSITE and other projects several instruments such as OBSs and the active acoustic
bubble tracker BOB. CNRS IUEM has deployed a geodetic acoustic array. The goal of these missions
Page 22
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 22/50
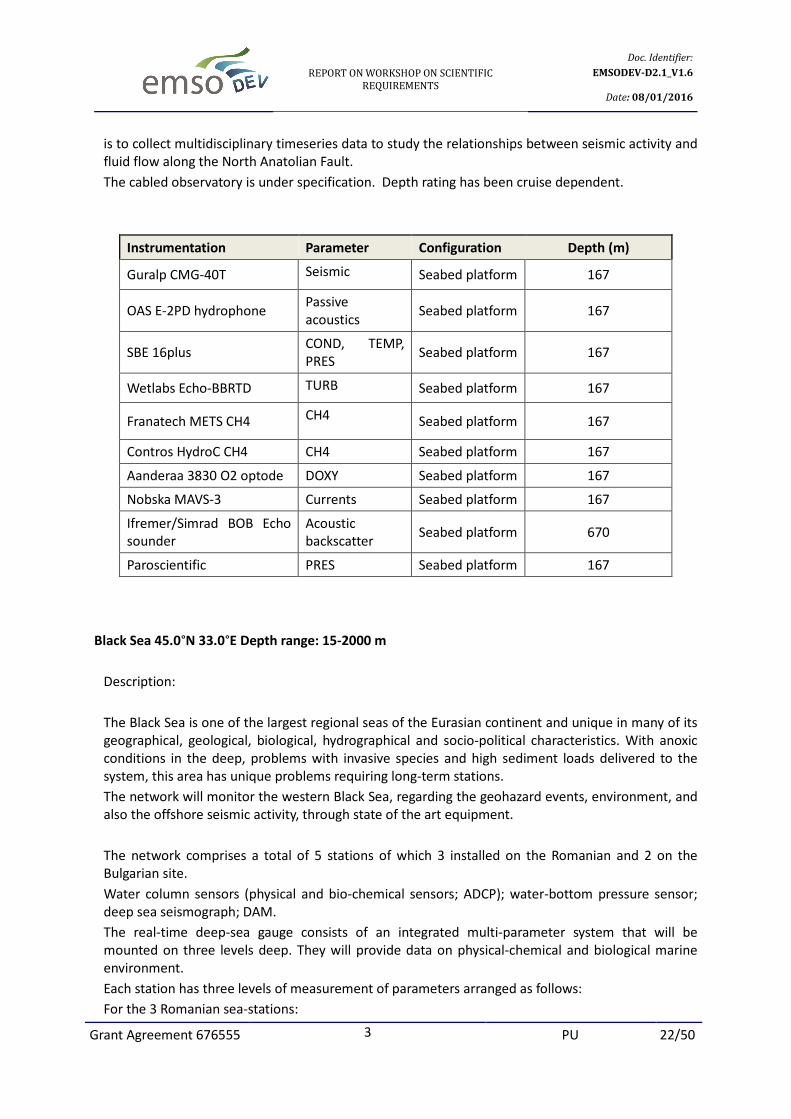
is to collect multidisciplinary timeseries data to study the relationships between seismic activity and
fluid flow along the North Anatolian Fault.
The cabled observatory is under specification. Depth rating has been cruise dependent.
Instrumentation Parameter Configuration Depth (m)
Guralp CMG-40T Seismic Seabed platform 167
OAS E-2PD hydrophone Passive
acoustics Seabed platform 167
SBE 16plus COND, TEMP,
PRES Seabed platform 167
Wetlabs Echo-BBRTD TURB Seabed platform 167
Franatech METS CH4 CH4 Seabed platform 167
Contros HydroC CH4 CH4 Seabed platform 167
Aanderaa 3830 O2 optode DOXY Seabed platform 167
Nobska MAVS-3 Currents Seabed platform 167
Ifremer/Simrad BOB Echo
sounder
Acoustic
backscatter Seabed platform 670
Paroscientific PRES Seabed platform 167
Black Sea 45.0°N 33.0°E Depth range: 15-2000 m
Description:
The Black Sea is one of the largest regional seas of the Eurasian continent and unique in many of its
geographical, geological, biological, hydrographical and socio-political characteristics. With anoxic
conditions in the deep, problems with invasive species and high sediment loads delivered to the
system, this area has unique problems requiring long-term stations.
The network will monitor the western Black Sea, regarding the geohazard events, environment, and
also the offshore seismic activity, through state of the art equipment.
The network comprises a total of 5 stations of which 3 installed on the Romanian and 2 on the
Bulgarian site.
Water column sensors (physical and bio-chemical sensors; ADCP); water-bottom pressure sensor;
deep sea seismograph; DAM.
The real-time deep-sea gauge consists of an integrated multi-parameter system that will be
mounted on three levels deep. They will provide data on physical-chemical and biological marine
environment.
Each station has three levels of measurement of parameters arranged as follows:
For the 3 Romanian sea-stations:
Page 23
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 23/50
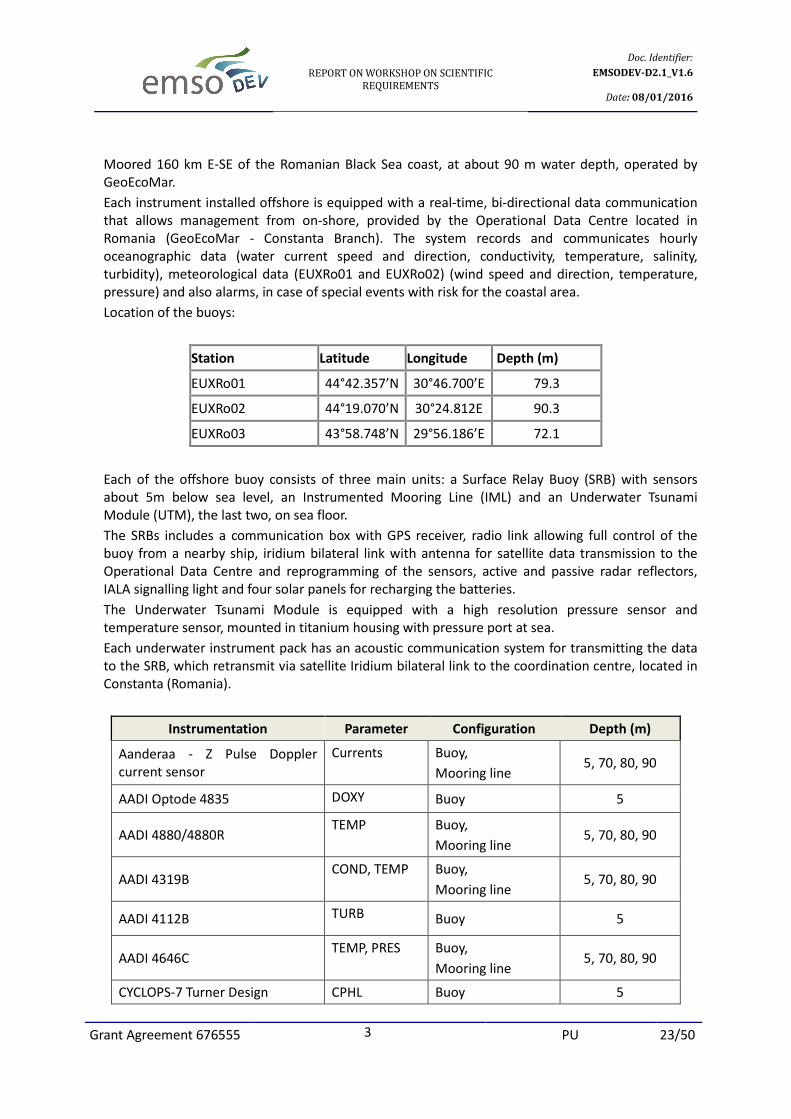
Moored 160 km E-SE of the Romanian Black Sea coast, at about 90 m water depth, operated by
GeoEcoMar.
Each instrument installed offshore is equipped with a real-time, bi-directional data communication
that allows management from on-shore, provided by the Operational Data Centre located in
Romania (GeoEcoMar - Constanta Branch). The system records and communicates hourly
oceanographic data (water current speed and direction, conductivity, temperature, salinity,
turbidity), meteorological data (EUXRo01 and EUXRo02) (wind speed and direction, temperature,
pressure) and also alarms, in case of special events with risk for the coastal area.
Location of the buoys:
Station Latitude Longitude Depth (m)
EUXRo01 44°42.357’N 30°46.700’E 79.3
EUXRo02 44°19.070’N 30°24.812E 90.3
EUXRo03 43°58.748’N 29°56.186’E 72.1
Each of the offshore buoy consists of three main units: a Surface Relay Buoy (SRB) with sensors
about 5m below sea level, an Instrumented Mooring Line (IML) and an Underwater Tsunami
Module (UTM), the last two, on sea floor.
The SRBs includes a communication box with GPS receiver, radio link allowing full control of the
buoy from a nearby ship, iridium bilateral link with antenna for satellite data transmission to the
Operational Data Centre and reprogramming of the sensors, active and passive radar reflectors,
IALA signalling light and four solar panels for recharging the batteries.
The Underwater Tsunami Module is equipped with a high resolution pressure sensor and
temperature sensor, mounted in titanium housing with pressure port at sea.
Each underwater instrument pack has an acoustic communication system for transmitting the data
to the SRB, which retransmit via satellite Iridium bilateral link to the coordination centre, located in
Constanta (Romania).
Instrumentation Parameter Configuration Depth (m)
Aanderaa - Z Pulse Doppler
current sensor
Currents Buoy,
Mooring line 5, 70, 80, 90
AADI Optode 4835 DOXY Buoy 5
AADI 4880/4880R TEMP Buoy,
Mooring line 5, 70, 80, 90
AADI 4319B COND, TEMP Buoy,
Mooring line 5, 70, 80, 90
AADI 4112B TURB Buoy 5
AADI 4646C TEMP, PRES Buoy,
Mooring line 5, 70, 80, 90
CYCLOPS-7 Turner Design CPHL Buoy 5
Page 24
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 24/50
For Bulgarian sea-stations, the following 3 depth ranges (level of measurements) will be equipped
with sensor packages:
Level 1: 0 - 10 m
Level 2: 20 – 30 m
Level 3: at the oxic-anoxic interface
The systems will provide data on physical-chemical and biological characteristics of the marine
environment. For each level of measurement there will be installed an underwater observatory
module able to integrate measuring sensors as follows:
Level 1 Level 2 Level 3
Oxygen, Temperature,
Conductivity, Turbidity,
Pressure, Chlorophyll,
Multiwave length excitation
fluorescence photometer,
Doppler Current Sensor;
Oxygen, Temperature,
Conductivity, Turbidity,
Pressure, Chlorophyll,
Doppler Current Sensor;
Temperature,
Conductivity, Turbidity,
Pressure, Doppler Current
Sensor
Number of sensors for each station: Oxygen (2), Temperature (3), Conductivity (3), Turbidity (2),
Pressure (3), Chlorophyll (2), Multiwave length excitation fluorescence photometer (1), Doppler
Current Sensor (3);
OBSEA 41.18°N 01.75°E Depth range: 20 m
Description:
OBSEA seafloor observatory
• Cabled to laboratory in Vilanova i la Geltru (UPC Barcelona Tech) by electro-optical cable
• Site Nature 2000 network Operating in real time since 2009
Obsea offers the possibility to deploy different types of measurement instruments, communication
modules or scientific experiments, and allow real time communication.
Devices can be deployed at 20m depth or at the surface buoy.
Obsea offers power supply (12 or 48Vdc up to 3 amps), Ethernet (10 /100Mbps) and serial
communications, and synchronization over PTP IEEE Std 1588.
Instrumentation Parameter Configuration Depth (m)
SBE 16 plus V2 COND, TEMP,
PRES
Seabed
platform 20
SBE 37 SMP COND, TEMP,
PRES
Seabed
platform 20
Page 25
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 25/50
Bjorge NAXYS hydrophone Passive acoustics Seabed
platform 20
Nortek AWAC AST 1 MHz Currents, waves Seabed
platform 20
Nanometrics Trillium 120P BB
OBS
Seismic Seabed
platform 20
Underwater camera OPT-06 Images Seabed
platform 20
Koljoe Fjord, west Swedish coast 58.23°N 11.58°E Depth range: 0-42 m
Description:
Koljoe Fjord multiparameter on-line cabled observatory has been installed and in continuous
operation since April 2011, with remote control and data telemetry implemented in real time over
internet.
Koljoe Fjord is also a sampling site of a monthly monitoring program run by SMHI (Swedish
Meteorological and Hydrological Institute). SMHI data are automatically retrieved from the SMHI
web database for quality checking of T, S, O2 measurements.
Weather measurements from Sven Loven Marine Research Centre (Kristineberg, University of
Gothenburg) are retrieved automatically for checking surface current measurements.
The observatory consists of a main hub, which is connected by cable to communication and power
systems on land with real-time monitoring of T, S, O2, CO2, currents, basin water renewal dynamics
and hypoxia establishment in between renewal events (O2/Salinity/currents), spring bloom
dynamics (CO2/O2/chlorophyll/waves/turbidity/acoustic backscattering).
New antifouling strategies are developed and tested in the field.
The node is prepared to host four experimental modules communicating either with Ethernet or
serial protocols.
Instrumentation Parameter Configuration Depth (m)
Aanderaa 4319A CONT, TEMP Mooring 9, 12, 15, 18, 21
Aanderaa 4835 O2, T optode DOXY, TEMP Mooring 9, 12, 15, 18, 21
Aanderaa 4330
O2, T optode
DOXY, TEMP Mooring 28.5
Aanderaa 4647 COND, PRES,
TEMP Mooring 28.5
Aanderaa DCS current meter Currents Mooring 28.5
Aanderaa RDCP 600 current
profiler
Currents Mooring 40.5
Aanderaa 3830 O2 optode DOXY Mooring 40.5
Page 26
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 26/50
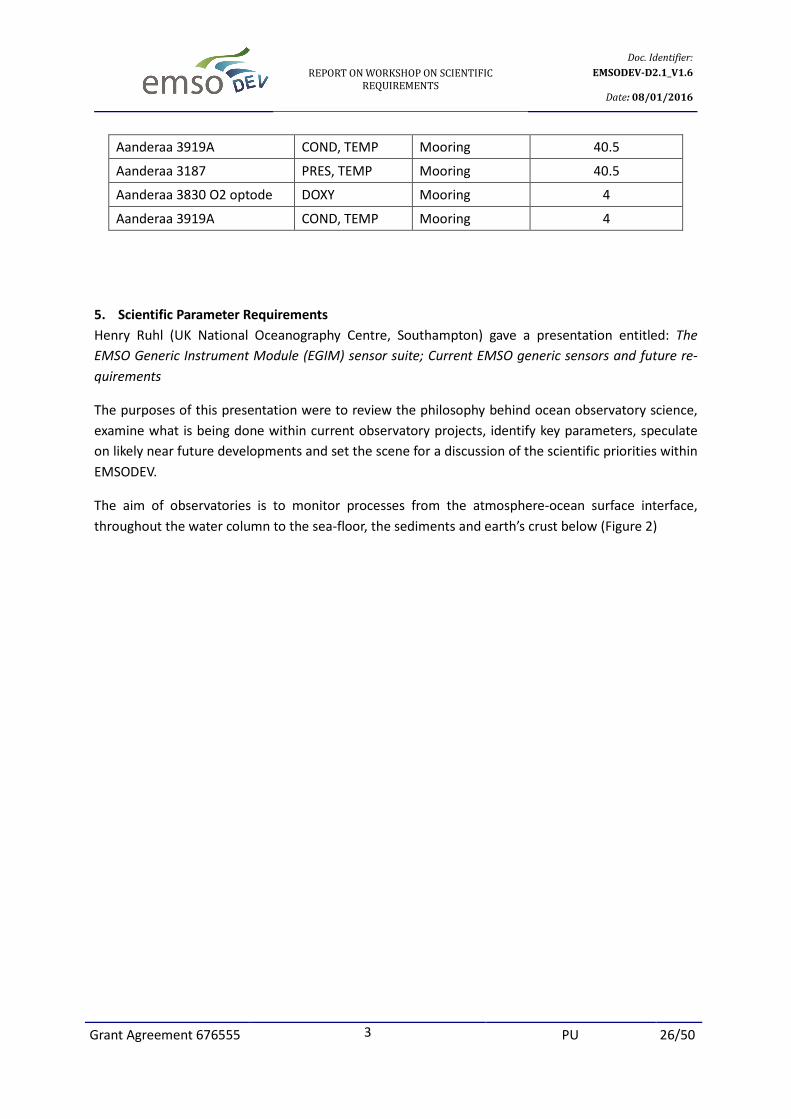
Aanderaa 3919A COND, TEMP Mooring 40.5
Aanderaa 3187 PRES, TEMP Mooring 40.5
Aanderaa 3830 O2 optode DOXY Mooring 4
Aanderaa 3919A COND, TEMP Mooring 4
5. Scientific Parameter Requirements
Henry Ruhl (UK National Oceanography Centre, Southampton) gave a presentation entitled: The
EMSO Generic Instrument Module (EGIM) sensor suite; Current EMSO generic sensors and future re-
quirements
The purposes of this presentation were to review the philosophy behind ocean observatory science,
examine what is being done within current observatory projects, identify key parameters, speculate
on likely near future developments and set the scene for a discussion of the scientific priorities within
EMSODEV.
The aim of observatories is to monitor processes from the atmosphere-ocean surface interface,
throughout the water column to the sea-floor, the sediments and earth’s crust below (Figure 2)
Page 27
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 27/50
Figure 2. Ocean processes that can be studied by means of observatories
These processes are expressed on different spatial and temporal scales from molecular processes and
turbulent mixing at millimetre and centimetre dimensions and time scales of seconds to minutes to
climate change and mantle convection at global (104 km) dimensions and time scales of centuries to
millennia. Fixed point observatories contribute uniquely on the temporal dimension with continuous
vigilance on scales of seconds to years and decades with the spatial dimension determined by the
spacing of the array, for example around Europe. The potential to monitor tsunamis as with the DART
buoy system in the Pacific Ocean is a good example of a short temporal scale application (Milburn et
al 1996 [1]), but with the caveat that many European marine geohazards are near-shore, and there-
fore need a different approach. Over the next century climate change is predicted to increase ocean
temperature, decrease oxygen and pH, which will have additive effects, generally decreasing ocean
biological productivity (Mora et al 2013, [2]). Sea floor biomass will decrease overall, but within Euro-
pean seas there may be differential effects, notably an increase in biomass in the Arctic region (Jones
et al. 2014, [3]). These climate changes and the drivers producing them are amenable to detection by
an effective network of ocean observatories operated over the next century.
The Overarching Science Themes are therefore
Page 28
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 28/50
• Natural and anthropogenic change.
• Interactions between ecosystem services, biodiversity, biogeochemistry, physics and cli-
mate.
• Impacts of exploration and extraction of energy, minerals, and living resources.
• Geo-hazard early warning capability for earthquakes, tsunamis, gas hydrate release, and
slope instability and failure.
• Connecting scientific outcomes to stakeholders and policy makers.
Within this framework the key question is what should be installed on EGIM? To qualify for EGIM a
sensor or instrument should:
• Meets a key scientific driver
• Meets depth and endurance requirements
• Meet high TRL level
• Meet reasonable cost to implement
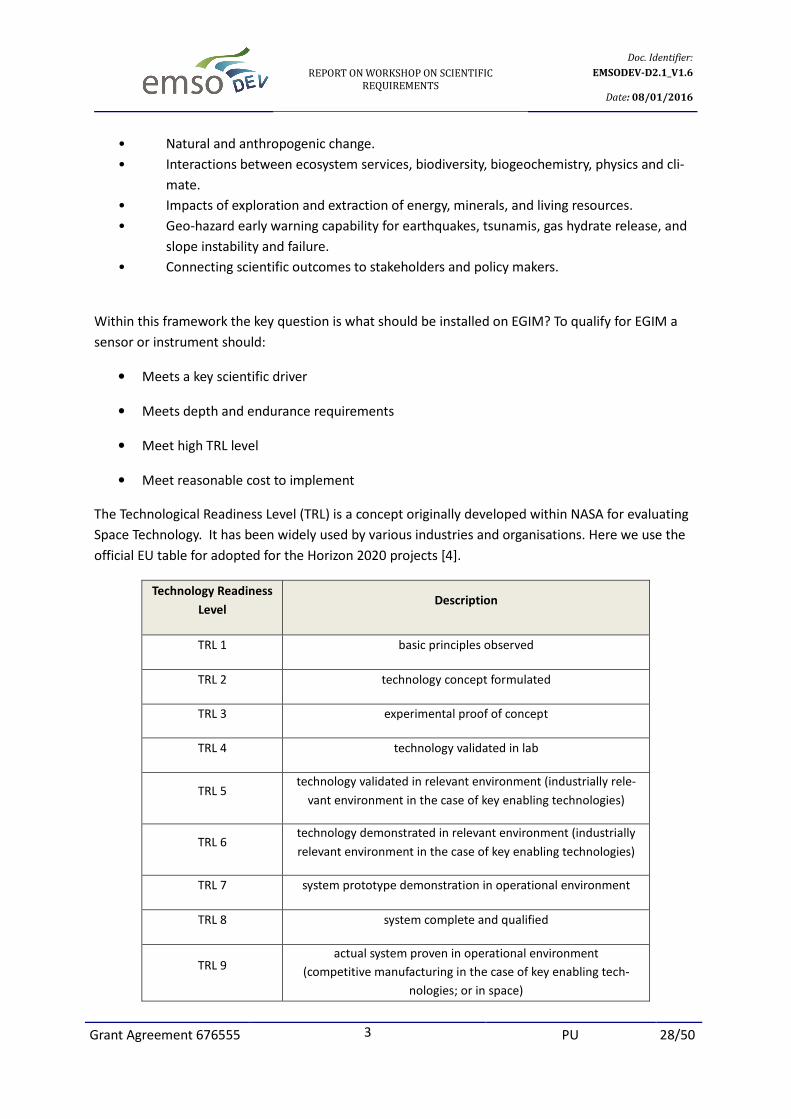
The Technological Readiness Level (TRL) is a concept originally developed within NASA for evaluating
Space Technology. It has been widely used by various industries and organisations. Here we use the
official EU table for adopted for the Horizon 2020 projects [4].
Technology Readiness
Level Description
TRL 1 basic principles observed
TRL 2 technology concept formulated
TRL 3 experimental proof of concept
TRL 4 technology validated in lab
TRL 5 technology validated in relevant environment (industrially rele-
vant environment in the case of key enabling technologies)
TRL 6 technology demonstrated in relevant environment (industrially
relevant environment in the case of key enabling technologies)
TRL 7 system prototype demonstration in operational environment
TRL 8 system complete and qualified
TRL 9 actual system proven in operational environment
(competitive manufacturing in the case of key enabling tech-
nologies; or in space)
Page 29
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 29/50
EMSO serves a range of scientific disciplines and it is important to consider the requirements already
specified by other organisations such as Global Climate Change Observing System (GCOS) Essential
Climate Variables. These have been defined for Atmospheric, Terrestrial and Oceanic domains [5].
For the oceanic domain, surface variables are defined to include the surface mixed later usually
within the 15m of the ocean and sub-surface are deeper measurements.
GCOS Essential Climate Variables Oceanic Domain
Surface Sub-surface
Sea-surface temperature Temperature
Sea-surface salinity Salinity
Sea level Current
Sea state Nutrients
Sea ice Carbon
Current Ocean tracers
Ocean colour Phytoplankton
Carbon dioxide partial pressure
Most of the commonly used sensors within EMSO have applications across a wide range of disciplines
and the challenge is to come to agreed specifications regarding locations in the water column and on
the sea floor, range, sensitivity, response time, and accuracy requirements.
Variable Geosciences Physical
Oceanography
Biogeochemistry Marine Ecology
Temperature X X X X
Conductivity X X X X
Pressure X X X X
Dissolved O2 X X X X
Turbidity X X X X
Ocean currents X X X X
Passive acoustics X X X
The different disciplines also have important differences with regard to the time scale of measure-
ments, some requiring fast responses time defined in seconds or minutes whereas for other applica-
tions daily or weekly sampling intervals are acceptable. The general operational expectation is that
sensors or instruments should function for one year between servicing and recalibration. Examples
of times series data already achieved on different time scales are the Station M data from the Nordic
Sea showing salinity and temperature anomalies (1950-2010), bottom-water temperature increase at
the Hausgarten site (2000-2008), submillimetric and sub second resolution of pressure changes in
the NE Pacific measured by sensors on NEPTUNE and with the Tsunameter on board the EMSO SN-1
abyssal cabled observatory in the Mediterranean Sea. These studies show sensors that are available
at TRL -9.
Page 30
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 30/50
Data format, timing, interfacing issues and calibration procedures were also considered.
New technologies are emerging making possible completely new kinds of measurements. Apparent
Oxygen Utilization (AOU) has been estimated for the Mediterranean deep sea from the difference be-
tween measured Dissolved Oxygen (DOXY) concentration and the predicted saturation DOXY concen-
tration [6]. This raises the possibility that an appropriate network of observatories in the Mediterra-
nean Sea could continuously measure total biological activity. Continuous acoustic and optical back-
scatter measurements can estimate turbulent total kinetic energy and suspended particulate matter
transport for the geosciences [7]. Passive acoustics detectors arranged in appropriate three dimen-
sional arrays can track marine mammals such as sperm whales and other cetaceans as already im-
plemented for example on the ANTARES neutrino telescope facility in the Western Mediterranean Sea
and at NEMSO-SN1 observatory in the Western Ionian. Great advances have been made in use of
biogeochemical sensors for nitrate concentration, chlorophyll a fluorescence and p(CO2) deployed in
mid water on a long term mooring at the PAP (Porcupine Abyssal Plain Observatory) resulting in high
resolution data over weekly to inter-annual time scales [8]. Time-lapse imaging is a well-established
technique and major new possibilities are expected by improving digital cameras and image recogni-
tion technology [9]. Plenoptic light field camera with an infinite depth of field promise further ad-
vances.
The final question is, should the EGIM include the possibility of incorporation of new sensors or
should it be focussed on existing technology well-established in 2015?
Discussion points and conclusions:
There was a wide-ranging discussion on issues raised by the talks
General specification for sensors
• Maximum depth: The required operating depth of sensors and instruments has been speci-
fied as 6000 m in order to cover all possible uses in European Seas plus a safety factor. The
maximum depths likely to be encountered are 4900 m in the NE Atlantic Ocean (Madeira
Abyssal Plain) and 5267 m (Calypso Deep, Ionian Sea, Mediterranean). However even in these
locations sensors on mooring strings are likely to be nearer the surface than the sea floor. It
was noted that insisting on full ocean depth capability would exclude many useful sensors
and technologies and could make the EGIM unnecessarily heavy for shallow water or near
surface deployment. It was concluded that depth ratings of individual EGIM installations
could be varied according to the operational environment.
• X,Y,Z positioning of sensors: The basic concept of EGIM is a relatively compact frame, a few
metres in maximum dimensions upon which all the sensors are mounted. For some applica-
tions sensors spaced out as an array are desirable. Tracking of bio acoustic sources can done
by measuring times or phase of arrival of signals at hydrophones in a 3D array. It was noted
that whilst large arrays are desirable, a 1.5 m tetrahedral arrangement at high frequency (200
kHz) could be effective. Vertical strings of thermistors have been very successful in detecting
Page 31
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 31/50
internal waves and other fine structure in the oceans [10]. It was agreed that the EGIM me-
chanical design should remain compact but if there is a mooring line, sensors distributed
through the water column might communicate with the EGIM through an inductive modem
using appropriate drivers.
• Service interval: It was noted that although a service interval of 12 months is desirable, ar-
ranging cruises at exact optimal times is rarely possible owing to scheduling conflicts, break-
downs or adverse weather. In practice this means a service interval of up to 18 months
should be specified to maintain continuous operations.
• Redundancy (Duplicate or triplicate parameter measurements): In critical situations, to over-
come the problems of instrument reliability, parallel redundancy may be an optimal solution.
However, duplicating or triplicating all the sensors would use up all the anticipated EGIM in-
put ports. Studies using replicate sensors would however provide useful information for
calibration and drift, which could not be achieved any other way. This could be a promising
research avenue. It was noted that many instruments include a temperature sensing capabil-
ity since this forms part of the measurement algorithm, hence temperature is likely to be rep-
licated in any typical EGIM installation.
• Drift linearity: It is generally assumed that between calibration prior to deployment and re-
calibration after recovery sensor drift has been linear during the intervening time period. If
the drift is exponential, for example, this can probably be proved and compensated for, but
more complex patterns may be difficult to elucidate. Sensor redundancy or replication seems
to be the best way forward. Sharing information across the EMSODEV and wider EMSO com-
munity is important.
• Calibration constraints: The importance of effective calibration was emphasised, but it was
noted that there are constraints, for example in checking calibrations at operational pressures
is not usually possible. For some chemical sensors, such as pCO2 , pH, or nutrients, generating
the appropriate test solutions may be very difficult. The calibration curves of some sensors
are highly nonlinear, with temperature, conductivity and pressure effects requiring multi-
dimensional polynomial techniques.
• Time scales: The response time of sensors varies from milliseconds to minutes. Specifications
should be clear about what is possible (e.g. some chemical sensors have an inherently slow
response time) and how readings are to be averaged or smoothed.
5.1 Measured Parameters
After extensive discussion a core set of seven parameters was agreed upon characterised by high TRL
values, wide existing usage and relevance to multiple disciplines. The details of the implementation of
these in relation to optimal measuring ranges, acquisition intervals and other factors will be deter-
mined after consultations with experts in each field of measurement.
Page 32
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 32/50
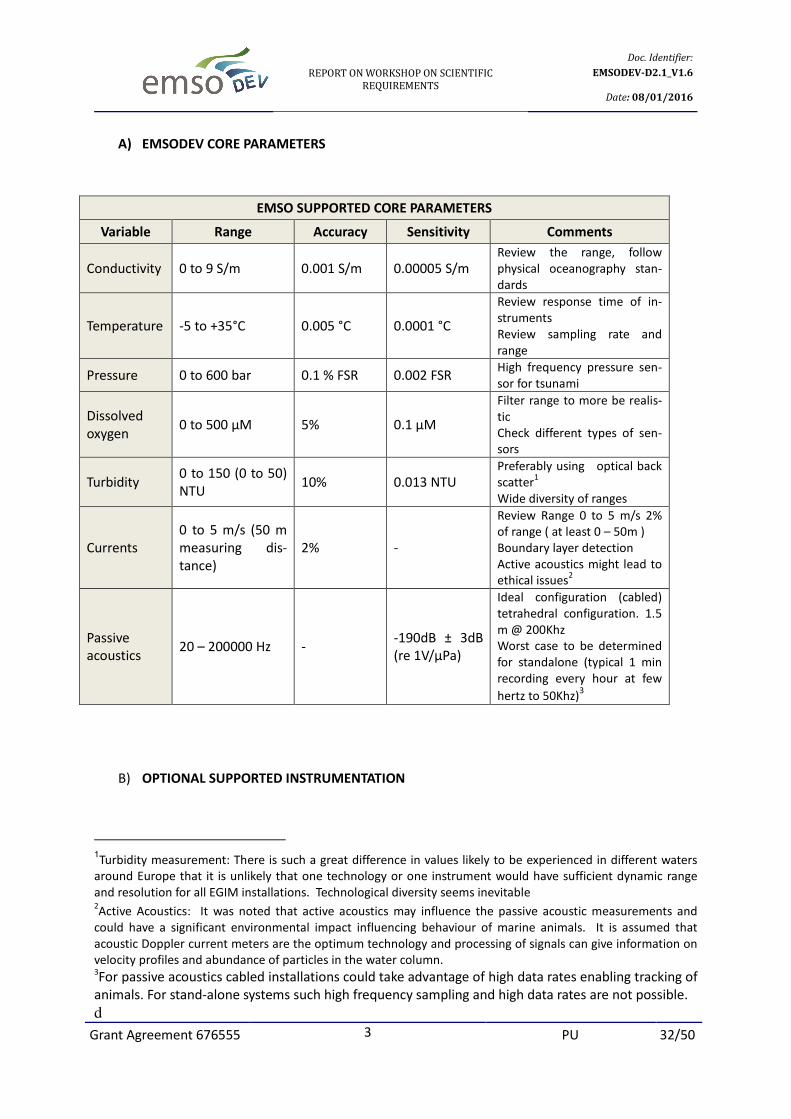
A) EMSODEV CORE PARAMETERS
EMSO SUPPORTED CORE PARAMETERS
Variable Range Accuracy Sensitivity Comments
Conductivity 0 to 9 S/m 0.001 S/m 0.00005 S/m
Review the range, follow
physical oceanography stan-
dards
Temperature -5 to +35°C 0.005 °C 0.0001 °C
Review response time of in-
struments Review sampling rate and
range
Pressure 0 to 600 bar 0.1 % FSR 0.002 FSR High frequency pressure sen-
sor for tsunami
Dissolved
oxygen 0 to 500 μM 5% 0.1 μM
Filter range to more be realis-
tic Check different types of sen-
sors
Turbidity 0 to 150 (0 to 50)
NTU 10% 0.013 NTU
Preferably using optical back
scatter1
Wide diversity of ranges
Currents
0 to 5 m/s (50 m
measuring dis-
tance)
2% -
Review Range 0 to 5 m/s 2%
of range ( at least 0 – 50m ) Boundary layer detection Active acoustics might lead to
ethical issues2
Passive
acoustics 20 – 200000 Hz -
-190dB ± 3dB
(re 1V/μPa)
Ideal configuration (cabled)
tetrahedral configuration. 1.5
m @ 200Khz Worst case to be determined
for standalone (typical 1 min
recording every hour at few
hertz to 50Khz)3
B) OPTIONAL SUPPORTED INSTRUMENTATION
1Turbidity measurement: There is such a great difference in values likely to be experienced in different waters
around Europe that it is unlikely that one technology or one instrument would have sufficient dynamic range
and resolution for all EGIM installations. Technological diversity seems inevitable 2Active Acoustics: It was noted that active acoustics may influence the passive acoustic measurements and
could have a significant environmental impact influencing behaviour of marine animals. It is assumed that
acoustic Doppler current meters are the optimum technology and processing of signals can give information on
velocity profiles and abundance of particles in the water column. 3For passive acoustics cabled installations could take advantage of high data rates enabling tracking of
animals. For stand-alone systems such high frequency sampling and high data rates are not possible.
d
Page 33
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 33/50
If it is assumed that the EGIM will have 10 to 12 input ports, this leaves capacity for either
redundancy or optional additional instruments selected according to attributes of particular sites
(e.g. vents or seeps) or particular science missions (primary production). The following set of
instruments were agreed to have a sufficiently high TRL and scientific importance, to be considered
as eligible for hosting on the EGIM as optional instruments to be decided upon at individual nodes.
Imaging systems have been used in fixed-point ocean observing systems for about 40 years and have
been responsible for important discoveries such as the seasonal deposition of organic matter
aggregates on the deep sea floor [11]. There is a diversity of technologies. It is possible to use white
light illumination, red light that is invisible to deep-sea creatures [12], or view ambient
bioluminescence with no artificial illumination of the scene [13]. Combined with rapidly advancing
digital imaging technology including high definition video, time-lapse stills, event-triggered imagery,
stereo systems and image recognition software there is such a variety of possibilities that it was
difficult to specify a standard solution. It was concluded that imaging systems will form an important
part of EMSO observatories and it is desirable that the EGIM should be able to host these as part of
the optional supported instrumentation. It was noted that optical instruments such as fluorimeters
emit light, which may disturb high sensitivity imaging devices.
High Definition video and Still imaging Specifications
Resolution 1600×1200 pixels
Minimum video capture speed 20 Frames per second
Sensitivity 0.05 lux
Sensor type CMOS
Sensor size 0.5 inches
Output protocol TCP/IP
Sensitivity to IR light 850 -900 Nano metres
EGIM SUPPORTED OPTIONAL PARAMETERS
Parameter Range Accuracy Sensitivity
Fluorescence /Chlorophyll-Α 0 to 50 μg/l - 0.02μg/l
pH 0 to 14 pH unit 0.005 pH unit -
partial CO2 pressure 0 to 4000 µatm ±1 % of reading < 1 µatm
partial CH4 pressure 0 to 40,000 µatm ±3 % < 1 µatm
Page 34
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 34/50
Lighting system
Minimum luminosity at one (1) meter 1000 Lux
Lighting temperature 6500 Κ
C) OPTIONAL NON-SUPPORTED INSTRUMENTATION
The following instruments were discussed but were judged to be of too low TRL or scientific priority
to be supported by the standard EGIM. Individual EMSO node operators may seek to install these in
parallel with the EGIM. Several of these are proposals emanating from GOOS (the Global Ocean
Observing System)
• Ground velocity (seismic signals)
• Nutrients (GOOS proposal)
• Trace metals (GOOS proposal)
• Suspended Particulates (GOOS)
There was discussion as to whether EGIM should provide nodes for tsunami (high frequency pressure
sensors) or earthquake (seismographs) detection as part of a public disaster warning system. Whilst
such sensors may be hosted by the EGIM, their operational use in warning systems is not part of the
work programme. Real-time transmission of data to public safety agencies is beyond the scope of
EMSODEV.
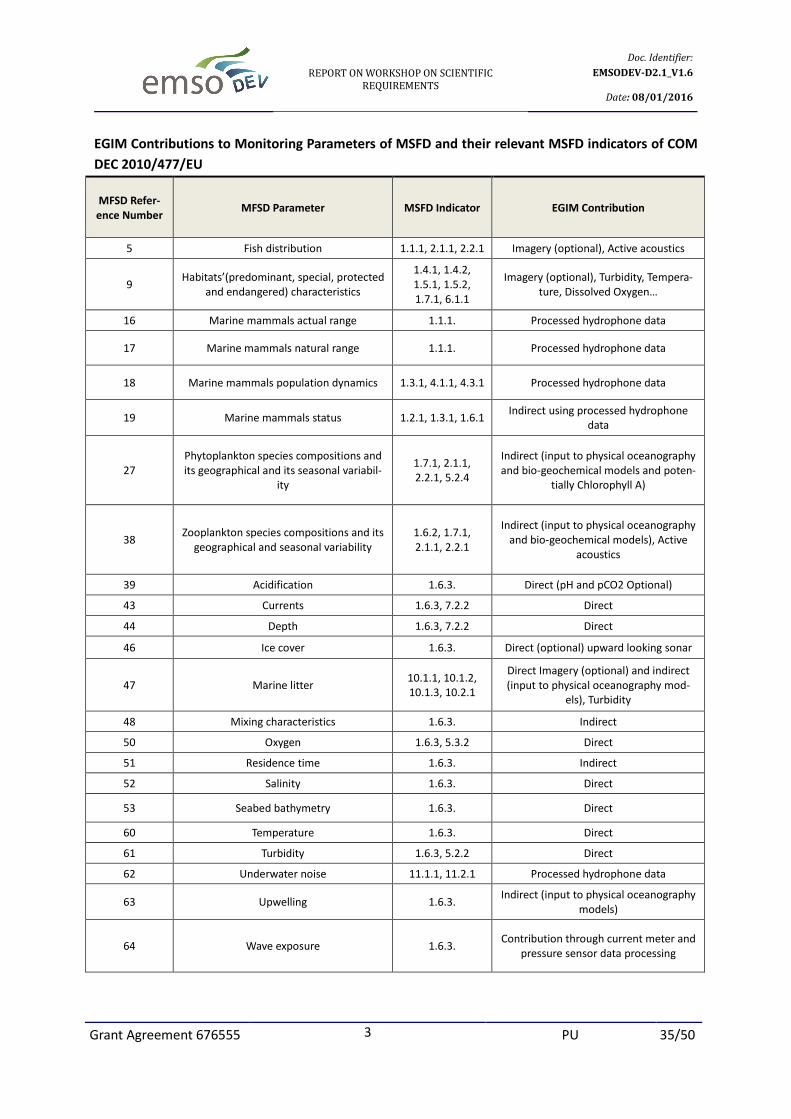
Conclusions:
The outcome of the discussion was compared with the requirements specified for the EU Marine
Strategy Framework Directive [14]. The EGIM contributes to over 20 of the 64 monitoring parameters
of MSFD given in the table below, either directly or indirectly. The detailed specifications of core pa-
rameters will be determined by consultations with experts. The architecture of the EGIM should be
able to host optional sensors.
Page 35
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 35/50
EGIM Contributions to Monitoring Parameters of MSFD and their relevant MSFD indicators of COM
DEC 2010/477/EU
MFSD Refer-
ence Number MFSD Parameter MSFD Indicator EGIM Contribution
5 Fish distribution 1.1.1, 2.1.1, 2.2.1 Imagery (optional), Active acoustics
9 Habitats’(predominant, special, protected
and endangered) characteristics
1.4.1, 1.4.2,
1.5.1, 1.5.2,
1.7.1, 6.1.1
Imagery (optional), Turbidity, Tempera-
ture, Dissolved Oxygen…
16 Marine mammals actual range 1.1.1. Processed hydrophone data
17 Marine mammals natural range 1.1.1. Processed hydrophone data
18 Marine mammals population dynamics 1.3.1, 4.1.1, 4.3.1 Processed hydrophone data
19 Marine mammals status 1.2.1, 1.3.1, 1.6.1 Indirect using processed hydrophone
data
27
Phytoplankton species compositions and
its geographical and its seasonal variabil-
ity
1.7.1, 2.1.1,
2.2.1, 5.2.4
Indirect (input to physical oceanography
and bio-geochemical models and poten-
tially Chlorophyll A)
38 Zooplankton species compositions and its
geographical and seasonal variability
1.6.2, 1.7.1,
2.1.1, 2.2.1
Indirect (input to physical oceanography
and bio-geochemical models), Active
acoustics
39 Acidification 1.6.3. Direct (pH and pCO2 Optional)
43 Currents 1.6.3, 7.2.2 Direct
44 Depth 1.6.3, 7.2.2 Direct
46 Ice cover 1.6.3. Direct (optional) upward looking sonar
47 Marine litter 10.1.1, 10.1.2,
10.1.3, 10.2.1
Direct Imagery (optional) and indirect
(input to physical oceanography mod-
els), Turbidity
48 Mixing characteristics 1.6.3. Indirect
50 Oxygen 1.6.3, 5.3.2 Direct
51 Residence time 1.6.3. Indirect
52 Salinity 1.6.3. Direct
53 Seabed bathymetry 1.6.3. Direct
60 Temperature 1.6.3. Direct
61 Turbidity 1.6.3, 5.2.2 Direct
62 Underwater noise 11.1.1, 11.2.1 Processed hydrophone data
63 Upwelling 1.6.3. Indirect (input to physical oceanography
models)
64 Wave exposure 1.6.3. Contribution through current meter and
pressure sensor data processing
Page 36
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 36/50
6. System Requirements of the EMSO nodes.
Jérôme Blandin of Ifremer gave an introductory presentation entitled “The EGIM System Concept”
which he had prepared jointly with Nadine Lantéri, Julien Legrand and Jean-François Rolin.
Firstly, EGIM was defined as a module able to operate from any EMSO node, hosting a set of sensors
providing measurements of the seven core parameters defined previously, plus one or several
additional sensors providing measurements of further generic variables of interest (including pCO2,
pH, pCH4, Chlorophyll a, and imagery). EGIM should also be able to host new sensors that are
unknown today that will meet future requirements
A central feature of EGIM is to take advantage of the EMSO infrastructure to have a number of ocean
locations where the same set of core variables are measured the same way using the:
1. same hardware
2. same sensor references
3. same qualification methods
4. same calibration methods
5. same data format and access
6. same maintenance procedures
If achieved there will be scientific benefits, decreases in cost, improved reliability and benefits to the
EMSO partnership through mutual understanding, sharing of know-how, and costs. The EGIM module
should be able to host all the different types of sensors in the same way. That will be a key point to
the modularity, inter-polarity and future evolution of the system. Furthermore the EGIM should be
able to operate in any EMSO node such as a:
• mooring line
• seabed station, cabled or non-cabled
• surface buoy
The EGIM module should act as a host for a set of sensors and provide all the services required to
ensure the best measurement quality and long-term availability. Those services being:
• Immersion, positioning, orientation and proper mechanical setting of the sensor in the
medium to ensure its optimal performance
• Protection against external aggressions, once installed and during deployment/recovery
operations
• Energy distribution and control
• Measurement sequencing
• Time stamping with a common clock, with high precision where necessary
Page 37
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 37/50
• Measurement data backup and storage
• Protection against fouling, where necessary
• Blank measurements
• Communication with the external world through the node, either locally, from underwater
with a visiting/installing submersible, semi-remotely - from the sea surface with
programming and test means provided by a ship, or remotely - from underwater or from the
sea surface, with an operator or a data centre on shore
• Recovery and restitution to human operators, on demand
The EGIM preliminary technical requirements to be reviewed during the workshop were:
Environment
• 0 – 6000 m depth
Operation duration without maintenance
• 1-year nominal
Interfaces with the EMSO infrastructure
• Power: 300-380 V dc for cabled observatories, 10-30 V dc for non-cabled platforms
• Communication: Copper or optical Ethernet 100BASE-T for cabled observatories, serial line to
acoustic, satellite or inductive modem for non-cabled platforms
Interfaces with sensors
• Power: [5 – 24 V] dc
• Data: serial line or Ethernet
Deployment
• Should EGIM be deployed independently from the EMSO node and if so how should the
connection be made, in air or underwater?
Redundancy
• How much redundancy is necessary in terms of sensors, energy sources and data logging
resources
The main challenges in the design of EGIM are the very diverse implementation conditions whilst
keeping the design as generic as possible.
Considerable experience has been gained through a series of previous EC funded projects dealing
with long term ocean sensor platforms (e.g., ALIPOR, GEOSTAR-1&-2, ORION-GEOSTAR3, ASSEM,
ESONET CA, ESONET NoE, EMSO PP) leading to considering the need to implement a generic ocean
sensor system is necessary. An early implementation has been achieved through the COSTOF2 project
COmmunication and STOrage Front-end that can serve as an example for what EGIM might be like
(Figure 3). COSTOF 2 adaptation to stand alone case and some specific sensors is underway in the
WP12 of FixO3, this will benefit to EGIM.
Page 38
Grant Agreement 676555
Figure 3. Conceptual sketch of a generic Ocean Sensor System
COSTOF2 provides the following sensor services
• Energy distribution & control
• Measurement sequencing
• Precision time stamping
• Measurement data storage
• Communication with the external world
• Protection against fouling (Built
active antifouling devices)
COSTOF2 performance and features
• Up to 12 sensors: Ethernet 1
• Processing: ARM 32 bits Cortex M3 48MHz on each board
• Storage: µSDHC (up to 64 GB on each board), NAS + SSD (up to 1TB x2)
• User access through embedded web servers
• 2 time precision classes: TCXO or e
• Sleep mode power: 1mW (with TCXO)
• TCP/IP connectivity (WIFI link) and non TCP/IP connectivity (Acoustic, inductive and satellite
link)
• Software POSIX compatibility
• Easy sensor integration with SDK for drivers development
• Active fouling protection
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
3 PU
Conceptual sketch of a generic Ocean Sensor System
COSTOF2 provides the following sensor services
Energy distribution & control
Measurement sequencing
Measurement data storage
Communication with the external world
Protection against fouling (Built-in capability of micro-chlorination, ability to drive other
active antifouling devices)
COSTOF2 performance and features
Up to 12 sensors: Ethernet 100BASE-T (up to 4), Serial (RS232, RS422, RS485, 1
Processing: ARM 32 bits Cortex M3 48MHz on each board
Storage: µSDHC (up to 64 GB on each board), NAS + SSD (up to 1TB x2)
User access through embedded web servers
2 time precision classes: TCXO or embedded atomic clock
Sleep mode power: 1mW (with TCXO)
TCP/IP connectivity (WIFI link) and non TCP/IP connectivity (Acoustic, inductive and satellite
Software POSIX compatibility
Easy sensor integration with SDK for drivers development
protection
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
PU 38/50
Conceptual sketch of a generic Ocean Sensor System
chlorination, ability to drive other
T (up to 4), Serial (RS232, RS422, RS485, 1-wire)
TCP/IP connectivity (WIFI link) and non TCP/IP connectivity (Acoustic, inductive and satellite
Page 39
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 39/50
• Monitoring and storage of technical parameters (Remaining energy, Voltage, Current, T°,
pressure, Water ingress detection)
• Sensor and technical alarm management
• Transparent mode
• Data download and firmware upgrade through FTP
The following Sensor Drivers have already been developed for the system:
Sensor drivers already developed
Manufacturer Model Description
Aanderaa 4330 O2
sensor
Axis Q1755 IP HD camera
Axis Q1765 IP HD camera
Gill Maximet Meteo Station
Ifremer Chemini Fe Fe In-situ analyzer
Ifremer CISICS Hydrothermal fluid sampler
NKE MP6 Multiparameters probe
Paroscientific 8CB4000-I Pressure gauge
Seabird SBE37SMP CTD
Wetlabs EcoNTU Turbidimeter
COSTOF2 shows that the essential features of EGIM are feasible and can be achieved in a package
with weight in air ca 650N and weight in water 350N mounted on a frame < 2m maximum dimension
equipped with the core sensor suite as shown in figure 4.
Page 40
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 40/50
Figure 4. Conceptual mechanical configuration of the EGIM module
In conclusion, the EGIM concept, is the key to actual mutualisation of effort and technical know-how
within the EMSO consortium. The time schedule for EMSODEV is quite short in which to realise a
working system, but COSTOF2 provides a basis for the EGIM prototype (WP3), which can then be
validated in shallow water tests (WP4).
Discussion:
A long discussion ensued to clarify issues surrounding the specification of the EGIM.
• The service interval should 15/18months instead of 12 but this might not be achievable in
environments with severe fouling.
• In the case of non-cabled observatories the power supply is likely to be a Lithium battery pack but
this does not form part of the EGIM module and must be provided by the user.
• The EGIM module will not support CAN-bus protocol for sensor communication
• The operating system of COSTOF2 is Free RTOS
• For synchronization the NTP can be used too, as an alternative to atomic clock for cabled
applications.
• The power requirement for the atomic clock is 100mwatts
• So far reliability of COSTOF boards has been high with no failures.
• EGIM comprises one cable that goes to a junction box with Subconn connectors for the sensors.
• There are no analogue inputs on COSTOF2 and connecting an analogue sensor requires an A/D
convertor. This will not be standard on the interface boards. A frame and other mechanical
components will be part of the EGIM and will have to be adapted to user constraints.
Page 41
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 41/50
• An ROV can be used to deploy/recover EGIM and additional buoyancy (syntactic foam) could be
necessary to reduce the underwater weight to fit the ROV specification.
• EGIM should be deployed and connected using the standard techniques and means used on the
node (ROV for deep sea nodes, small or medium boats and divers in shallow water, wet mateable
or dry connectors...)
6.1 EGIM Architecture
As stated above the EGIM will provide everything that an instrument needs to function and measure.
EGIM will also provide the functionalities for storing the measured data in a consistent way. EGIM will
support an interface for transmitting the measurements.
The advantage will be to have a homogenous system across the EMSO nodes with the same hardware,
same data format, measuring the same parameters (at least a sub set) with the same reference
sensors and same qualification and calibration methods. The instruments must be seen by the EGIM
the same way independent of the manufacturer. In order for EGIM to perform as expected and
provide the necessary future expandability, a modular design approach will be used based on
cascaded microprocessor boards that can provide the needed computational power, but at the same
time consuming as little energy as possible.
General EGIM criteria are
• Must provide anything the sensor needs to produce quality measurements.
• It should be modular
• Instruments should be pluggable into any available port corresponding to its data
communication standard (serial or Ethernet)
• Have no proprietary protocol
• EGIM will be common for stand-alone and cable nodes
• Size small enough to be Manipulated by the use of medium size ROV (Oceanographic)
• Lifetime of 20 years for the materials used
• 18 months of continuous data storage
• Remote maintenance capabilities (i.e. Modification of sampling parameters, modification of
sensor parameters and sensor status)
• Software extension capabilities for instance triggering capabilities based on events, alarms
and parameter thresholds
• Full duplex communication
• Availability 80 – 85%
• The EGIM unit should include back up batteries for shutting down in an orderly way in the
case of power failure (amount of energy to be defined).
Page 42
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 42/50
6.2 Stand alone
According to the workshop the EGIM unit should be able to be deployed on stand-alone
observatories. In this configuration, minimisation of energy consumption is of paramount importance.
The energy consumption is related directly to the frequency of the recordings from each instrument.
These recordings must be frequent enough to be scientifically meaningful and at the same time
keeping the volume of the necessary battery pack at a reasonable size and cost.
For the stand alone observatories there are two main categories:
Mooring line
In this category the EGIM unit will need to have a special mechanical cage frame that can be held in
tension mooring configuration. The frame will host the EGIM unit along with the necessary battery
pack. A software programme will be provided to the user to estimate the power load required by the
sensor modules, deployment time and measurement rates in order to configure missions compatible
with battery power and energy capacities. In this configuration the EGIM unit may provide the
necessary interface for connecting an inductive modem or an acoustic modem to transmit data in
semi - real time. A full data set will be stored on board for downloading on recovery of the system.
In summary the EMSO node should provide:
• alternative mechanical cage if the standard one is not the best solution for the platform
• batteries necessary to supply energy to the EGIM in the range of 10 -30 VDC.
• data link equipment (i.e. inductive modem, hydro acoustic modem)
• full connector (plug and bulkhead on the EGIM) to build the interface cables between the
EGIM and the mooring equipment (data link and power supply)
Benthic platforms (Landers)
The mechanical frame of EGIM will rest on the sea floor and will be the same as that used for the
cabled observatories. For benthic platforms the EGIM unit will interface for transmitting data via a
hydro acoustic modem. The battery pack will be provided by the user.
In summary the node should provide:
• data link equipment (hydro acoustic modem)
• power supply system in the range of 10 -30 VDC
• full connector (plug and bulkhead on the EGIM) to build the interface cables between the
EGIM and the mooring equipment (data link and power supply)
6.3 Cabled
According to the workshop, the EGIM will be able to interface to the power and data connections
available on each of the cabled nodes.
The node should provide:
• input voltage in the range of 300 -380 VDC or 10-30VDC
• input current in the range of 3 – 10 A depending on the instrument setup
Page 43
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 43/50
• copper or optical fibre Ethernet data link with a bandwidth in the range of 100 -1000 Mpbs
• full connector (plug and bulkhead on the EGIM) to build the interface cables between the
EGIM and the mooring equipment (data link and power supply)
The instrumentation will be setup for a continuous mode of operation with sampling intervals of the
parameters that will be limited only by the bandwidth of the available data connection.
6.4 Interfaces
The EGIM interface is split into two parts, the instrumentation interfaces for connecting the
instruments and the nodes interface for connecting to the EMSO nodes.
Instrumentation interface
The instrumentation interface will be further fine-tuned, but the conclusion after the workshop
summarises the following:
• Up to twelve (12) serial connections (Types: EIA 232, 422, 485 interchangeable via software)
with a maximum of 115200 baud.
• Up to four (4) Ethernet connections of 100 Mbps
• Adjustable voltage per instrument in the range 5 -24 VDC
• Maximum current per sensor : 3 amperes
EMSO nodes interface
The interface for the connection with the nodes will be:
• One (1) Ethernet copper connection
• A copper-optical media converter can be added on as an interface where needed, this option
is supported by the infrastructure owner (connectors, converter,...)
• One (1) Serial output for transmitting data
• One (1) Serial input for telemetry and control input
• One (1) power output (optional) for powering communication instruments such as a hydro
acoustic modem
6.5 Data storage
Data storage will be performed on the EGIM for up to 18 months of continuous storage (recording of
data). Data can also be stored inside some of the instruments giving a level of redundancy. It was
estimated that the storage requirement will be 256 GBytes for instrumentation extended with an
additional NAS server of up to 2 TBytes for video and sound recording.
Page 44
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 44/50
6.6 Communication systems
The supported communication systems providing the link for data transmission will be the following
three:
• Serial Hydro acoustic modem
• Serial Inductive modem
• Ethernet
The EGIM unit will not include the hydro acoustic and inductive modem communication systems.
6.7 Function and control requirements
According to the workshop the function and requirements of the EGIM unit will be the following:
• Full duplex communication with the node and the sensors
• Configuration via a web interface
• Separate acquisition interval for each measured parameter (or to be clarified)
• Software extension capabilities (parameter dependant): Threshold for each measured
parameter with the ability to fire alarms and events such as increasing the sampling
frequency. The alarms can interact from instrument to instrument (i.e. triggering an increased
turbidity sampling rate in case of a specific event detected with ADCP)
• Transparent mode of control providing a direct link with each connected instrument
• Software extension capabilities for data processing on board the unit (parameter dependant)
• Data storage and transmission in ASCII (.csv) or binary format.
• Control of active anti-fouling devices (electro-chlorination , uv lights, poison TBT, wiper...)
• Possibility of using smart enabled sensors using sensorML
• Time precision clock with +/- 2x10-6
drift (~1 minute per year) for time stamping
• Atomic precision clock with +/- 5x10-11
drift (~ 1,5 ms per year) for time stamping
• Synchronisation with NMEA + PPS and/or NTP
• Remote maintenance capabilities such as modification of sampling parameters, modification
of sensor parameters and sensor status.
6.8 Redundancy and backup systems
According to the workshop, redundancy will be provided in terms of data by using 2 separate storage
locations inside the EGIM and a third being the internal memory of some of the instruments.
Redundancy in terms of measured parameters will be provided for some parameters that overlap
within different instruments (Duplicate or triplicate parameter measurements).
7. Off-the-shelf Instrumentation Survey and Selection
Page 45
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 45/50
Nick O’Neil (SLR) gave a presentation entitled
Availability & Market for Commercial off the Shelf (COTS) Sensors and Components for EMSO.
Sub-sea instrumentation has diverse applications. Oceanographic research is a small fraction of the
total activity as exemplified by results from a market review done within the EU NEXOS project:
Market Assessment for Ocean Instrumentation and Sensors (EU NEXOS Project)
Aim R&D
Industrial/
Economic
Perspective
Legal Role of Sensors
Market
Sensor aim from the perspective of market sectors Today 2020
Monitoring and Environ-
mental Quality √ - √ ** ***
Offshore Oil & Gas √ √ √ ** ***
Industrial water quality
measurements - √ √ ** **
Oceanographic Research √ √ √ ** **
Fisheries √ √ √ * **
Aquaculture √ √ √ * **
Ocean Renewable Energy √ √ - * **
Deep Sea Mining √ √ - - ***
Port Security √ √ √ * ***
Sensors are utilized in multiple sectors and their role is predicted to increase over the rest of this dec-
ade. For observatory infrastructures such as EMSO, this means that suppliers are not wholly depend-
ent on one group of clients but they design their products with multiple users. This creates a mature
market for some sensors, which EMSODEV can benefit.
A general classification of the sensors in marine industry is:
1. Sensors in which the technology is mature (High TRL) and there is more than one compliant
manufacturer.
2. Sensors where the TRL is intermediate and there may be only one leading technology with
other manufacturers trying to improve their product.
3. Sensors with no off- the- shelf supplier and support.
Page 46
Grant Agreement 676555
Figure 5. The Market in Marine Science and Technology (Annual Review of Marine Scientific Industries
2013)
In terms of overall market activity for marine science and technology, Oil and Gas remains the largest
sector according to a survey of the UK Marine Scientific Industries with geographical growth antic
pated in Asia and South America (Figure. 5)
The Oil and Gas Industry together wit
concentrate mostly on “mature” technologies of equipment and sensors. This is driven by the indu
try need to use robust and tested equipment with high TRL. These high
ly not interested in purchasing a sensor or particular set of hardware, their interest is in the info
mation and services that those items can provide. This has resulted in development of a value chain
within the field of environmental monitoring services wit
erating the services required. A simplified supply chain diagram for Oil and Gas Environmental and
Monitoring reveals how the market has developed into multiple tiers, with instrument manufacturers
sourcing components, the instruments being packaged into operational systems, operators managing
the systems, data banks archiving and processing information and service providers delivering pro
ucts to the final users. The total market is much larger than the value of th
the ocean.
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
3 PU
The Market in Marine Science and Technology (Annual Review of Marine Scientific Industries
activity for marine science and technology, Oil and Gas remains the largest
sector according to a survey of the UK Marine Scientific Industries with geographical growth antic
pated in Asia and South America (Figure. 5)
The Oil and Gas Industry together with Renewable Energy, Defense and Environmental Monitoring
concentrate mostly on “mature” technologies of equipment and sensors. This is driven by the indu
try need to use robust and tested equipment with high TRL. These high-level clients are fundamenta
not interested in purchasing a sensor or particular set of hardware, their interest is in the info
mation and services that those items can provide. This has resulted in development of a value chain
within the field of environmental monitoring services with intermediaries known as integrators ge
A simplified supply chain diagram for Oil and Gas Environmental and
Monitoring reveals how the market has developed into multiple tiers, with instrument manufacturers
ts, the instruments being packaged into operational systems, operators managing
the systems, data banks archiving and processing information and service providers delivering pro
ucts to the final users. The total market is much larger than the value of the hardware deployed in
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
PU 46/50
The Market in Marine Science and Technology (Annual Review of Marine Scientific Industries
activity for marine science and technology, Oil and Gas remains the largest
sector according to a survey of the UK Marine Scientific Industries with geographical growth antici-
h Renewable Energy, Defense and Environmental Monitoring
concentrate mostly on “mature” technologies of equipment and sensors. This is driven by the indus-
level clients are fundamental-
not interested in purchasing a sensor or particular set of hardware, their interest is in the infor-
mation and services that those items can provide. This has resulted in development of a value chain
h intermediaries known as integrators gen-
A simplified supply chain diagram for Oil and Gas Environmental and
Monitoring reveals how the market has developed into multiple tiers, with instrument manufacturers
ts, the instruments being packaged into operational systems, operators managing
the systems, data banks archiving and processing information and service providers delivering prod-
e hardware deployed in
Page 47
Grant Agreement 676555
Figure 6. Value Chain of Environmental Monitoring Services. (Based on EU NEXOS project)
With all this development there is a mature market able to supply Commercial off the Shelf (COTS)
sensors for most of the anticipated EGIM
sioning of two DELOS (Deep Sea Long Term Observing System) platforms on behalf of BP to provide
environmental information at 1400m depth off Angola in an area of oil and gas exploitati
now functions as part of the FixO3 network. Since the system is part of an oil field installation it uses
entirely tried and tested COTS instrumentation modules, sensor and equipment that can be serviced
within the routine operations of the oi
[15].
The challenge therefore for the EMSODEV project in relation to commercial sensors will be:
• Sourcing
• Validation
• Selection
There are a number of tools available to provide market
vide necessary information to a potential sensor user
Title
ESONET Yellow Pages
Marine Technology News
Hydro International
Alliance for Coastal Tech-
nologies
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
3 PU
Value Chain of Environmental Monitoring Services. (Based on EU NEXOS project)
With all this development there is a mature market able to supply Commercial off the Shelf (COTS)
anticipated EGIM-EMSO core variables. This is demonstrated by the commi
sioning of two DELOS (Deep Sea Long Term Observing System) platforms on behalf of BP to provide
environmental information at 1400m depth off Angola in an area of oil and gas exploitati
now functions as part of the FixO3 network. Since the system is part of an oil field installation it uses
entirely tried and tested COTS instrumentation modules, sensor and equipment that can be serviced
within the routine operations of the oil field. The DELOS platform hosts a full suite of 11
The challenge therefore for the EMSODEV project in relation to commercial sensors will be:
There are a number of tools available to provide market intelligence on what is available and to pr
vide necessary information to a potential sensor user.
Webpages for instrumentation
Link Info type
www.esonetyellowpages.com Sourcing
Selection
www.marinetechnologynews.com Sourcing
Selection
http://www.hydro-
international.com/companies
http://www.act-us.info/
Sourcing
Validation
Selection
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
PU 47/50
Value Chain of Environmental Monitoring Services. (Based on EU NEXOS project)
With all this development there is a mature market able to supply Commercial off the Shelf (COTS)
EMSO core variables. This is demonstrated by the commis-
sioning of two DELOS (Deep Sea Long Term Observing System) platforms on behalf of BP to provide
environmental information at 1400m depth off Angola in an area of oil and gas exploitation. This
now functions as part of the FixO3 network. Since the system is part of an oil field installation it uses
entirely tried and tested COTS instrumentation modules, sensor and equipment that can be serviced
l field. The DELOS platform hosts a full suite of 11 instruments
The challenge therefore for the EMSODEV project in relation to commercial sensors will be:
intelligence on what is available and to pro-
Info type
Sourcing
Selection
Sourcing
Selection
Sourcing
Validation
Selection
Page 48
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 48/50
The EMSO community itself has considerable experience and know-how. It is important to record
what type of equipment the partners are using in their observatories.
There are opportunities for the European ocean observatory infrastructure to be used to introduce
sensors that are not yet at a high TRL. This will improve the technology and the performance of the
sensors, accelerating development towards meeting user and industry requirements. The scientific
community also needs to develop links with the ‘Integrators’; the companies and organizations that
assemble sensors and instrumentation into systems to deliver solutions to their clients in the private
and industry sector.
Discussion points and conclusions:
There was an extensive discussion on the issues arising from this presentation.
• It was felt desirable to promote European manufacturers of sensors and equipment.
• It was thought that maintenances cost would be reduced if the EGIM components come
from European industries. However, some US and other foreign manufacturers have devel-
oped effective support infrastructures in Europe. European-based agents or integrators us-
ing imported components could not be excluded from tendering processes. Purchasing de-
cisions would generally be based on technical and value for money criteria.
• It would be desirable for the EMSODEV community to interact with the Alliance for Coastal
Technologies, the ongoing process to build related European organisations (I3 JERICONEXT)
and similar portals.
• The ESONET Yellow Pages will be used as the primary reference for the sensors, but needs to
be continually updated.
• It is important that the EMSODEV community collates and shares information in order to fa-
cilitate good procurement decisions.
8. CONCLUSIONS
During the WP2 workshop the partners had the opportunity to extensively discuss all the key issues
identified and described in the DOW. In particular, regarding the scientific parameter requirements,
core parameters were agreed while their detailed specifications will be determined through a
consultation with experts.
All the core sensors have a high TRL and are available commercially off the shelf (COTS). The market
for the optional sensors is developing. EGIM ports can also be used for development and trials of new
sensors not yet at high TRL. EGIM will be designed for installation on the sea floor or in the water
Page 49
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 49/50
column, either connected to a cable or autonomous, powered by a local battery pack. The
implications of different configurations are reviewed.
Information is collated on sensors required for the EGIM nodes, how they can be integrated into the
EGIM package and the availability of sensors commercially off the shelf.
9. BIBLIOGRAPHY
[1] Milburn, H.B., A.I. Nakamura, and F.I. Gonzalez (1996): Real-time tsunami reporting from the deep
ocean. Proceedings of the Oceans 96 MTS/IEEE Conference, 23-26 September 1996, Fort
Lauderdale, FL, 390-394.
[2] Mora, C., C.-L. Wei, A. Rollo, T. Amaro, A. R. Baco, D. Billett et al. (2013), Biotic and Human Vulner-
ability to Projected Changes in Ocean Biogeochemistry over the 21st Century. PLoS Biol 11(10):
e1001682. doi:10.1371/journal.pbio.1001682
[3] Jones, D. O. B., A. Yool, C.-L. Wei, S. A. Henson, H. A. Ruhl, R. A. Watson and Gehlen, M. (2014),
Global reductions in seafloor biomass in response to climate change. Glob Change Biol, 20:
1861–1872. doi:10.1111/gcb.12480
[4] European Commission, G. Technology Readiness Levels (TRL), "Technology readiness levels
(TRL)".HORIZON 2020 – WORK PROGRAMME 2014-2015 General Annexes, Extract from Part 19 -
Commission Decision C(2014)4995.
[5] http://www.wmo.int/pages/prog/gcos/index.php?name=EssentialClimateVariables (accessed 29
October 2015)
[6] Santinelli C., L.Nannicini, A. Seritt (2010), DOC dynamics in the meso and bathypelagic layers of
the Mediterranean Sea. Deep-Sea Research II 57:1446-1459.
[7] Souza, A.J., L.G. Alavarez and T. D. Dickey (2004), Tidally induced turbulence and suspended sedi-
ment. GEOPHYSICAL RESEARCH LETTERS, VOL. 31, L20309, doi:10.1029/2004GL021186,
[8] Hartman, S. E., Z.-P. Jiang, D. Turk, R. S. Lampitt, H. Frigstad, C. Ostle, and U. Schuster (2015) Bio-
geochemical variations at the Porcupine Abyssal Plain sustained Observatory in the northeast At-
lantic Ocean, from weekly to inter-annual timescales. Biogeosciences, 12, 845–853,
[9] Aguzzi , J., A. Mànuel , F. Condal, J. Guillén, M. Nogueras, J. del Rio, C. Costa, P. Menesatti , P.
Puig, F. Sardà , D. Toma and A. Palanques (2011) The New Seafloor Observatory (OBSEA) for Re-
mote and Long-Term Coastal Ecosystem Monitoring. Sensors 11, 5850-5872;
doi:10.3390/s110605850
[10 van Haren, H., R. Groenewegen, M. Laan and B. Koster ( 2005) High sampling rate thermistor
string observations at the slope of Great Meteor Seamount. Ocean Science, 1, 17-28, SRef-ID:
1812-0792/os/2005-1-17.
van Haren, H., M.Laan, D.-J. Buijsman, L.Gostiaux, M. G. Smit, and E. Keijzer (2009), NIOZ3: inde-
pendent temperature sensors sampling yearlong data at a rate of 1 Hz, Journal of Oceanic Engi-
neering 34, 315–322, doi:10.1109/JOE.2009.2021237
[11] Bett, B.J., (2003) Time-Lapse Photography in the Deep Sea. UNDERWATER TECHNOLOGY THE IN-
TERNATIONAL JOURNAL OF THE SOCIETY FOR UNDERWATER ·MARCH 2003 DOI:
10.3723/175605403783379741
[12] Widder, E. , B. Robison, K. Reisenbichler, S. Haddock (2005). "Using red light for in situ observa-
tions of deep-sea fishes". Deep Sea Research Part I: Oceanographic Research Papers 52 (11):
2077–2085. doi:10.1016/j.dsr.2005.06.007
[13] Heger, A., N. King, B. D.Wigham, A. J. Jamieson, P. M. Bagley, L. Allan, O. Pfannkuche, I.G.
Priede (2007) Benthic Bioluminescence in the bathyal North East Atlantic: Luminescent re-
Page 50
REPORT ON WORKSHOP ON SCIENTIFIC
REQUIREMENTS
Doc. Identifier:
EMSODEV-D2.1_V1.6
Date: 08/01/2016
Grant Agreement 676555 3 PU 50/50
sponses of Vargula norvegica (Ostracoda: Myodocopida) to predation by the deep water eel
(Synaphobranchus kaupii). Marine Biology 151 (4): 1471-1478 DOI;10.1007/s00227-006-0587-7
[14] Zampoukas N., P. Henna, E. Bigagli, N. Hoepffner, G. Hanke and A.C. Cardoso (2012), Monitoring
for the Marine Strategy Framework Directive: Requirements and Options. EUR 25187 EN– Joint
Research Centre – Institute for Environment and Sustainability. Luxembourg: Publications Office
of the European Union
EUR – Scientific and Technical Research series – ISSN 1831-9424 (online), ISSN 1018-5593 (print)
ISBN 978-92-79-22811-7 doi:10.2788/77640
[15] Vardaro, M. F., P. M. Bagley, D. M. Bailey, B. J. Bett, D. O.B. Jones, R. J. Milligan, I. G. Priede et al. 2013. "A
Southeast Atlantic deep-ocean observatory: first experiences and results." Limnol. Oceanogr. Methods 11:
304-315.