DESIGN OF A SIX DEGREE OF FREEDOM MOTION PLATFORM FOR VEHICLE DRIVING SIMULATOR APPLICATION CHIEW YEONG SHIONG A thesis submitted in fulfilment of the requirements for the award of the degree of Master of Engineering (Mechanical) Faculty of Mechanical Engineering Universiti Teknologi Malaysia NOVEMBER 2009
Transcript
DESIGN OF A SIX DEGREE OF FREEDOM MOTION PLATFORM FOR
VEHICLE DRIVING SIMULATOR APPLICATION
CHIEW YEONG SHIONG
A thesis submitted in fulfilment of the
requirements for the award of the degree of
Master of Engineering (Mechanical)
Faculty of Mechanical Engineering
Universiti Teknologi Malaysia
NOVEMBER 2009
iii
To my dearest and loving parents, brother, and all of my friends for their unending
love, sacrifices, and moral support
iv
ACKNOWLEDGEMENT
I wish to express my sincere appreciation to my supervisors, Associate
Professor Dr. Mohamad Kasim Abdul Jalil and Dr. Mohamed Hussein for the
invaluable advice and guidance throughout this research. Their encouragement and
dynamic ideas enabled the research to be carried out successfully.
I also would like to thank Dr. Mohd. Zarhamdy, Mr. Shamsul Bahri, Mr.
Kang, Mr. Hii and a number of faculty members who have unselfishly shared their
time and knowledge with me.
Last but not least, I wish to give thanks to my research colleagues and
seniors, for their caring and support during the many trying moments. Thank you for
being there.
v
ABSTRACT
This research presents the design and development of a six degree of freedom
(6-DOF) motion platform for vehicle driving simulator application in Universiti
Teknologi Malaysia. The development processes include reviews of driving
simulator technology and design configurations, development of motion platform
mathematical modeling and simulation, control algorithm development and
validation of simulation results. The motion platform design is based on Stewart
platform design configuration. It was mathematically modeled using inverse
kinematics to control the kinematic behaviours of the motion platform. A
visualisation tool, SimMechanics was used to validate the motion platform motions
cues virtually. A Proportional-Integral-Derivative (PID) control algorithm for
motion platform actuators control was developed and tested. The motion platform
prototype was constructed and interfaced with simulation model through data
acquisition system to perform 6-DOF vehicle motion. The prototype was tested and
the kinematic performance of the prototype is validated. The results show that the
motion platform can be used for driving simulator application.
vi
ABSTRAK
Penyelidikan ini bertujuan untuk mereka bentuk dan membangunkan satu
pelantar gerakan untuk penyelaku pacuan kenderaan yang dapat bergerak dalam
enam darjah kebebasan (6-DOF) di Universiti Teknologi Malaysia. Proses
pembangunan yang terlibat di dalam penyelidikan ini adalah kajian berkaitan
teknologi simulasi memandu, konfigurasi rekaan, pembangunan model matematik
dan simulasi pelantar gerakan, pembangunan algoritma kawalan dan pengesahan
keputusan simulasi. Rekabentuk pelantar gerakan adalah berdasarkan konfigurasi
pelantar Stewart. Model matematik pelantar gerakan ini telah dibuat dengan
menggunakan kinematik songsang untuk mengawal kelakuan kinematiknya. Alatan
gambaran SimMechanics telah digunakan untuk mengesahkan pergerakan pelantar
gerakan. Pengawal algoritma Terbitan-Kamiran-Berkadaran (PID) untuk pelantar
gerakan telah dibangunkan dan diuji. Prototaip pelantar gerakan telah dibina dan
diperantaramuka dengan aturcara penghubungan model simulasi untuk bergerak
dalam arah 6-DOF. Prototaip telah diuji dan pengesahan prestasi kinematik pelantar
gerakan telah dilakukan. Keputusan telah menunjukkan bahawa pelantar gerakan ini
boleh digunakan untuk penyelaku pacuan kenderaan.
vii
TABLE OF CONTENTS
CHAPTER SUBJECTS PAGE
TITLE PAGE i
DECLARATION OF ORIGINALITY ii
DEDICATION iii
ACKNOWLEDGEMENTS iv
ABSTRACT v
ABSTRAK vi
CONTENTS vii
LIST OF TABLES xii
LIST OF FIGURES xiii
LIST OF SYMBOLS xvii
LIST OF APPENDICES xix
CHAPTER 1 INTRODUCTION
1.1 Preface 1
1.2 Problem Statement 2
1.3 Objective of Study 4
1.4 Scope of Study 4
1.5 Research Methodology 4
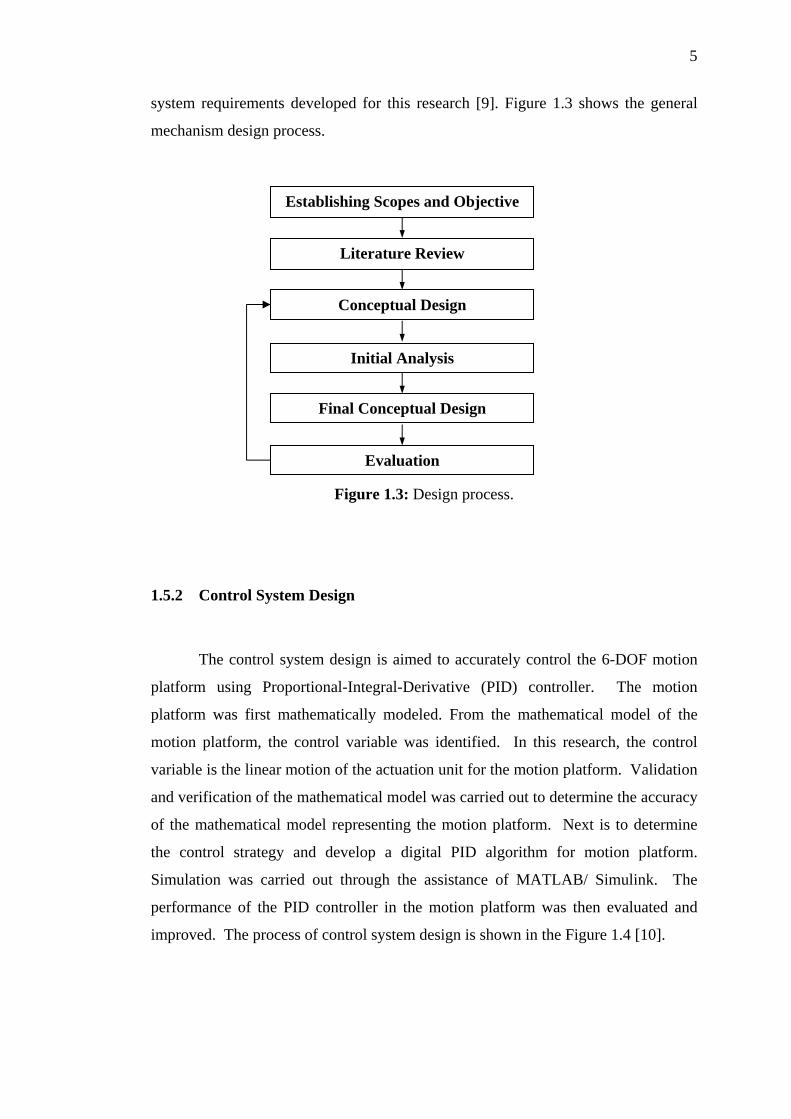
1.5.1 Mechanism Design 5
1.5.2 Control System Design 5
1.5.3 System Integration 7
1.5.4 Summary 7
viii
1.6 Research Contributions 8
1.7 Gantt Chart 8
1.8 Thesis Organization 9
CHAPTER 2 LITERATURE REVIEW
2.1 Introduction 10
2.2 Driving Simulator Classification 10
2.2.1 The Daimler-Benz Driving Simulator 11
2.2.2 National Advanced Driving Simulator 12
2.2.3 Toyota Driving Simulator 13
2.2.4 Mid-Level Driving Simulator 14
2.3 Motion Platform Configuration 16
2.3.1 5-Axis Motion Platform 16
2.3.2 Stewart Platform 17
2.3.3 Parallel Cable Drive 18
2.3.4 Motion Platform for Amusement
Devices 19
2.3.5 Mechanical Actuated Motion Platform 20
2.3.6 Summary: - Selection of Motion
Platform Design Configuration 21
2.4 Motion Platform Control Strategy 21
2.4.1 Motion Platform Kinematics Study: -
Inverse Kinematics 22
2.4.2 Proportional-Integral-Derivative (PID)
Controller 24
2.4.3 PID Tuning: - Ziegler-Nichols Method 25
2.5 MATLAB/ Simulink: - SimMechanics 26
2.6 Summary 28
ix
CHAPTER 3 MOTION PLATFORM DESIGN AND SYSTEM
CONFIGURATION
3.1 Introduction 29
3.2 Motion Platform Requirement 29
3.3 Product Design Specification and Limitation 30
3.4 Conceptual Design 34
3.4.1 Design Concept 1 34
3.4.2 Design Concept 2 34
3.4.3 Design Concept 3 35
3.4.4 Design Concept 4 36
3.4.5 Design Concept 5 36
3.5 Design Evaluation 37
3.6 Modifications and Detail Design 38
3.7 Motion Platform System Layout 39
3.8 Summary 41
CHAPTER 4 MOTION PLATFORM MODELING AND SIMULATION
4.1 Introduction 42
4.2 Inverse Kinematic Model (IKM) 42
4.3 Independent Vehicle Dynamic Model 44.
4.4 SimMechanics Motion Platform Generation
Process 46
4.5 Interfacing: - Simulation and Data Acquisition
System 49
4.6 Single Motor Control Model (SMCM) 53
4.7 Motion Platform Graphical User Interface
(MPGUI) 54
4.8 Summary 55
x
CHAPTER 5 RESULTS AND DISCUSSIONS
5.1 Introduction 57
5.2 Inverse Kinematic and SimPlatform Simulation
Results 57
5.2.1 Motion Platform Idle Position 59
5.2.2 Motion Platform Rotational Movement 59
5.2.3 Motion Platform Translational
Movement 61
5.2.4 Motion Platform Combined Motions 63
5.3 Proportional-Integral-Derivative Controller
(PID Controller) Tuning 65
5.3.1 Ziegler-Nichols PID Tuning Results 66
5.3.2 Heuristic Tuning 68
5.4 Actual Motion Platform Simulation 71
5.4.1 Simulink Profiler: - Model
Optimization 71
5.4.2 Motion Platform Hardware and
Simulation Integration 73
5.4.3 Experimental Results on Motion
Cueing 75
5.4.4 Motion Platform Kinematic Calibration
Using Total Station 77
5.4.5 PID Controller for Motion Platform 82
5.4.6 Results of PID Controller for Sinusoidal
Motion Trajectory 84
5.5 Summary 85
CHAPTER 6 CONCLUSION AND RECOMMENDATIONS
6.1 Conclusion 87
6.2 Recommendations 88
REFERENCES 91
xi
APPENDICES A - L 97
LIST OF PUBLICATIONS 221
xii
LIST OF TABLES
TABLE NO. TITLE PAGE
2.1 Ziegler-Nichols PID tuning parameters 26
3.1 Desirable motion platform motion limits 30
3.2 Actuators location calculation 32
3.3 Evaluation criteria 37
5.1 Simulation input 58
5.2 Proportional, Integral and Derivative value for P, PI






































![Atmel | SMART SAM G55G SAM G55J Datasheetww1.microchip.com/downloads/en/DeviceDoc/Atmel-11289-32-bit-Cort… · SAM G55 [DATASHEET] Atmel-11289F-ATARM-SAM-G55G-SAM-G55J-Datasheet_27-May-16](https://static.documents.pub/doc/80x56/5aeba1537f8b9ae5318df375/atmel-smart-sam-g55g-sam-g55j-sam-g55-datasheet-atmel-11289f-atarm-sam-g55g-sam-g55j-datasheet27-may-16.jpg)



![caxapa.rucaxapa.ru/thumbs/771821/Atmel-11289-32-bit-Cortex... · SAM G55 [DATASHEET] 7 Atmel-11289F-ATARM-SAM-G55G-SAM-G55J-Datasheet_27-May-16 PIO Controller - PIOA - PIOB PA0–PA31](https://static.documents.pub/doc/80x56/5f05568d7e708231d412789b/sam-g55-datasheet-7-atmel-11289f-atarm-sam-g55g-sam-g55j-datasheet27-may-16-pio.jpg)
