28
Dipartimento di Elettronica e Informazione MATEO-ANTASME Project meeting Milano, May 21, 2007
| Date post: | 22-Dec-2015 |
| Category: |
Documents |
| View: | 213 times |
| Download: | 0 times |

Dipartimento di Elettronica e Informazione
MATEO-ANTASME Project meetingMilano, May 21, 2007

2
Outline
1. The research unit
2. Expected contributions to ANTASME
3. Deliverables
4. WP6: Object-oriented modelling of mechatronic electrohydraulic
systems
5. WP7: Object-oriented modelling of spacecraft dynamics

3
The DEI research unit
Prof. Paolo Rocco (person in charge)
Prof. GianAntonio Magnani
Tiziano Pulecchi (PhD candidate)
Luca Viganò (PhD candidate)

4
Expected contributions to ANTASME
DEI will develop multi-domain modelling and simulation environments for aerospace systems, with specific attention to mechatronic electrohydraulic systems and to spacecraft attitude and orbit dynamics.
The environments will offer hierarchical modular modelling capabilities, to ensure models reuse, and a “natural” (i.e. not requiring a specific modelling knowledge) approach to complex model definition.
A library of basic models of the physical components for aerospace systems shall be developed.
5
Tools: the modelling language Modelica
Main features: Object-oriented language: class = model Modelica is based on equation, not on assignments:
• Acausal approach.• Reuse of classes.
Multidomain approach:• Electrical• Mechanical• Hydraulic• …
Website: www.modelica.org

6
A commercial package for multi-domain simulation based on Modelica.
It is used both in the academy and in industry:
• Daimler Chrysler• BMW• Audi,• Volkswagen • Toyota• …
Tools: the simulation environment Dymola
Website: www.dymola.com

7
Completed deliverables
WP6 WP7
8
Objectives:
Models of DDV (Direct Drive Valve) electrohydraulic actuators; Integration of the model within a realistic helycopter system model.
WP6: OO modelling of mechatronic electrohydraulic systems
Deliverables:
6.1 (completed): “Design description of the object-oriented library for mechatronic electrohydraulic systems”
6.2 (after 12 months): “Assessment of the performance of the mechatronic electrohydraulic library in a case study”
Presented by Luca Viganò

9
Helicopter flight mechanics model
Flight mechanics model Fully parametrizedSome features:
Level 1 simulation compliant (Padfield, ’96) MBC rotor model (flapping states), Pitt-Peters/Keller dynamic wake Engine RPM dynamics Aerodynamics of lifting surfaces and fuselage (look-up-table based) Atmospheric gust 3D virtual environment

10
Flight Control Model
Helicopter Control Geometry in a FBW configuration:- 4 main stationary servoactuators
(left,aft,right,tail)- Collective/cyclic blade pitch
commands (C,P,R,Y) to L,A,R,T servos displacements: interlink+primary mixer reproduced by FCS software.
- Mechanical swashplate
Main/tail rotor servoactuators modules:- Geometric transformations- 1 dof (or >complex if needed)
mechanical impedance- Easy parametrization by means of
records.

11
Servoactuator Model
3 Level of details possible for each servoactuator:- 2nd order plus saturation and rate limiter (classical flight sim. model)- Simplex hydraulic system (no electrical dynamics)- Complex DDV model (electrical and hydraulic redundancies)

12
Servoactuator Model
Medium and high-detail servoactuator model assembled with the mechatronic electrohydraulic library (deliverable 6.1) :
Duplex hydraulic system Quadruplex electrical system Nonlinear friction Elastic support Detailed valve/cylinder model …
DDV, closed-loop, redundant model tested for nominal and faulty conditions (jammed valve or one hydraulic line operative)

13
Case Study
Helicopter digital AFCS provided by a standard inner-outer loops strategy:
Inner loop: ACAH (Attitude Command Attitude Hold):
• Scheduled LQ explicit model following (Lewis & Stevens, ’92)
• Bandwidths compliant with ADS-33 (Level 1,2)
Outer loop: • Hold modes (IAS hold, ALT hold,
HDG hold,…)• Turn coordination
Empirical external load on servos:
Justified by difficult airload predictability and good disturbance rejection at all frequencies.DC load + vibratory load Nb/rev (actuator performance specification)
Load case 1: 98% peak-to-peak stall load (62% DC + 36% vib.)
Load case 2: 50 % Load case 1
Turbulence on (severe)

14
Case Study: Test 1
Test 1: hover, vertical climb (1575 ft/min), yaw rate pulse, long. acceleration

15
Case Study: Test 1 – Aft Servo
Valve jam
(t=50sec.)

16
Case Study: Test 2
Test 2: accel. from hover to 100kts IAS, roll/pitch/heave periodic commands

17
Case Study: Test 2 – Aft Servo
Valve jam
(t=200sec.)

18
Conclusions
A Modelica library for mechatronic electrohydraulic systems has been developed and used for the assessment of performance of a detailed DDV actuator, in nominal or faulty conditions.
The isolated servo model has been integrated with an existing Modelica helicopter flight mechanics simulator, in such a way as to preserve modularity of both models.
Avionic integration of DDV-FBW servoactuators has been tested in simulation using a standard AFCS structure:
Physical redundancies work fine, concealing faults at flight mechanics level
Servo tracking performances and robustness can be evaluated in a sufficiently realistic framework
Availability of numerically affordable but realistic external load model could improve model accuracy and help to reduce conservatism in control design.

19
Objectives:
Development of a library for simulation of spacecraft attitude and orbit dynamics
Verification in a case study
WP7: OO modelling of spacecraft dynamics
Deliverables:
7.1 (completed): “Design description of the modelling library for spacecraft dynamics”
7.2 (after 12 months): “Assessment of the performance of the spacecraft dynamics library in a realistic case study”
Presented by Tiziano Pulecchi

20
• The SFDL provides the user with a very intuitive and ready for use
modelling and simulation tool, specially suitable for rapid design and
multi-architecture assessment of a generic space vehicle.
• Lists of models for the most commonly used AOCS sensors, actuators
and controls are available, as basic model components from whose
interconnection the complete spacecraft can be quickly obtained.
• Multiple architectural configurations can be quickly evaluated leading to
the system final definition.
• The SFDL capabilities will be proved in a case study consisting in the
ACS design for a fine attitude pointing GEO spacecraft endowed with a
single solar array rotating in the orbital plane (maximum energy
adsorption).
What can a Modelica Space Flight Dynamics Library do?

21
• The object-oriented framework allows the user to build a complex system
from elementary models. The complete spacecraft can be obtained as
the interconnection of the following main systems: Dynamics: includes the modeling of the spacecraft as the interconnection
(through a revolute joint) of two rigid bodies, the main body and the solar array, and the definition of the spacecraft initial conditions (i.e., orbit, attitude);
Sensors: defines the actual spacecraft on board sensors; The availability of a star sensor for precise attitude reference, a GPS receiver, gyroscopes and a three axes magnetometer will be assumed;
Controls: describes the AOCS, including algorithms for control strategies,
attitude determination, data fusion, etc.;
Actuators: defines the actuators set equipping the considered spacecraft.
The spacecraft model

22
Dynamics:
• solar_array model: based on standard Modelica MultiBody library components.
• spacecraft main_body: SpacecraftDynamics model
Initial conditions defined by selecting the desired orbit, simulation initial time and
initial spacecraft misalignment;
Alternative choice: standard Modelica MultiBody initialization option;
Spacecraft inertial properties, geometry definition retrieved from ad hoc records.
Dynamics
angle formed in the ecliptic plane between the vernal equinox and the
sun position vectors
Ref. epoch (sun at Ares point)
23
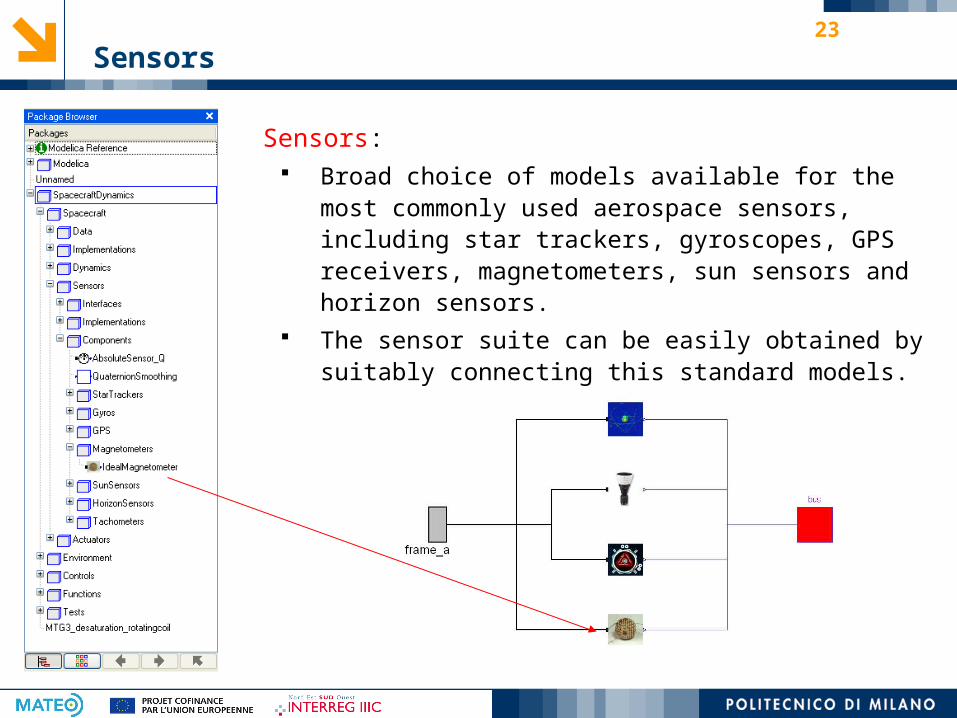
Sensors: Broad choice of models available for the most commonly
used aerospace sensors, including star trackers, gyroscopes, GPS receivers, magnetometers, sun sensors and horizon sensors.
The sensor suite can be easily obtained by suitably connecting this standard models.
Sensors

24
Control: High precision attitude control for large, asymmetric spacecraft can be
suitably achieved via a set of RWs; Albeit the RWs provide full three axes controllability of the spacecraft,
angular momentum will build up in the RWs eventually reaching saturation and thus leading to loss of control authority;
The removal of the excess momentum is achieved by means of external torques provided by magnetotorquers (inexpensive);
The control architecture comprises algorithms devoted to:• computation of the torque required to meet the specified control
requirements;
• control allocation between the two actuator sets;
• computation of RWs angular momentum variation and magnetotorquers magnetic dipole
To this end, SFDL control components can be exploited.
Control
25
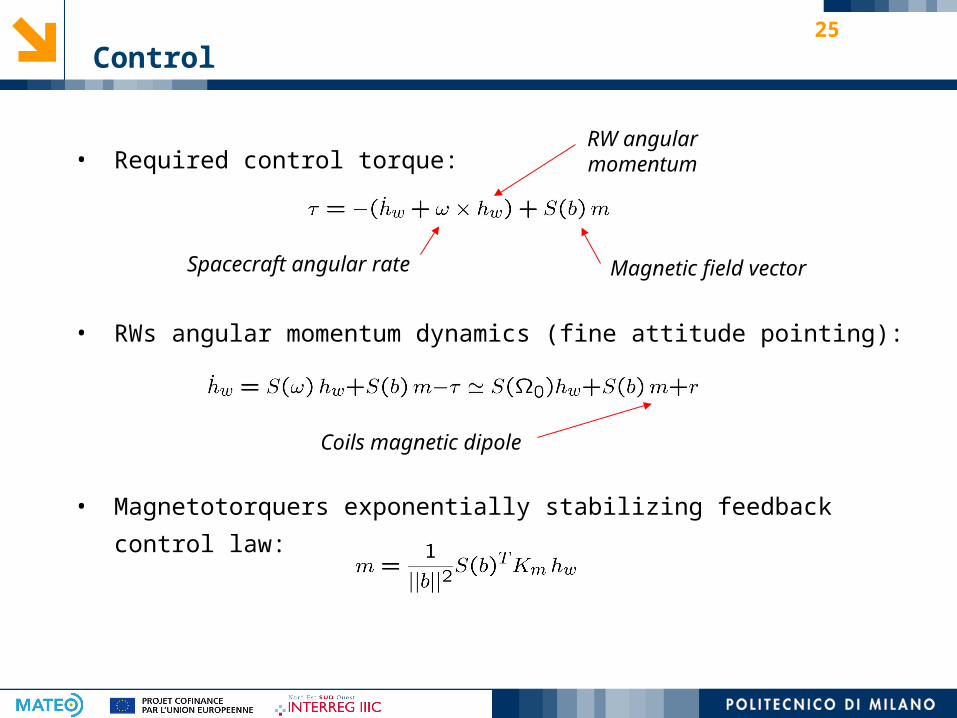
• Required control torque:
• RWs angular momentum dynamics (fine attitude pointing):
• Magnetotorquers exponentially stabilizing feedback control law:
Control
RW angular momentum
Magnetic field vectorSpacecraft angular rate
Coils magnetic dipole

26
Actuators
Actuators: Broad choice of models available for the most commonly
used aerospace actuators, including several architecture for reaction wheels, control moment gyroscopes, impulsive thrusters and magneto torquers.
The sensor suite can be can be quickly obtained by suitably connecting standard SFDL models.

27
• Magnetic field and solar radiation pressure data used for simulation can be downloaded from the National Geophysical Data Center website (http://www.ngdc.noaa.gov/stp/GOES/goes.html);
• Data recorded by GOES-7 geostationary satellite from 4 till 8 January 1996, representative of in orbit environmental conditions.
Simulation
Solar radiation pressure
Magnetic field b2 component

28
Simulation
Coils magnetic dipoles
RWs angular momentum

















