123
Discrete Geometric Analysis Graph theory from the view of analysis and geometry Toshikazu Sunada Department of Mathematics, Meiji University 1

Discrete Geometric Analysis
Graph theory from the view of analysis and geometry
Toshikazu Sunada
Department of Mathematics,Meiji University
1

The main objective of this lecture is
to provide the audience with an overview of
Discrete Geomeric Analysis
The main role is played by
Discrete Laplacians
‖Discrete analogue of the Laplace-Beltrami
operators (Laplacian) on Riemannianmanifolds
————————————————— The Laplacian on Rn
∆ =∂2
∂x12+ · · · +
∂2
∂xn2
The Laplacian on a Riemannian manifold (M, g)
∆ =1√
det g
n∑
i,j=1
∂
∂xi
(√det ggij ∂
∂xj
)
= div · grad
= −δd
δ denotes the formal adjoint of the exterior differen-
tiation d.
Remark Geometer’s Laplacian =−∆
2

Two different views for graphs
1. Think of a graph as a 1-dimensional “sin-gular” space.
2. Think of a graph as a discrete object sothat edges play only a role of an incidencerelation among vertices.
Our view is in “between”.—————————————————
A guiding principle
One of guiding principles in discrete geo-metric analysis is to pursue analogy with con-tinuous models.
Naive analogy negatively curved manifolds ⇐⇒ graphs (of degree
≥ 3,
manifolds with constant negative curvature ⇐⇒regular graphs
Warning 1: Not always this does work !
Warning 2: Not always easy is the graph setting !
3

A striking example of analogy
Regular tree and Poincare disc
—————————————————Graph Theory Geometry
a regular tree X the unit disc D withthe Poincare metric
automorphism group of X isometry group of H
a finite regular graph a closed Riemann surface withconstant negative curvature
discrete Laplacian on X Laplacian ∆ on D
paths without geodesicsbacktracking
spherical functions on X spherical functions on H
Ihara’s zeta function Selberg’s zeta functionfor a finite regular graph for a closed Riemann surface
4

So many topics !
—————————————————
The First Lecture
The notion of discrete Laplacians is intro-duced. Several examples in which discreteLaplacians play important roles are exhib-ited, say
Harmonic oscillators,Electric circuits,Dehn’s theoremComputer graphics,
The nature of the first lecture is elementary.
5

Notations and conventions
A graph is denoted as X = (V, E), where
V = the set of vertices,
E = the set of all oriented edges
o(e) = the origin of e ∈ E,
t(e) = the terminus of e ∈ E,
e = the inversion of e ∈ E.
s - so(e) t(e)
e s so(e)
¾
t(e)e
Ex = e ∈ E; o(e) = x |Ex| is called the degree of x, and written as deg x.
—————————————————
Throughout graphs are supposed to be locally finite
(deg x < ∞ for all x ∈ V ).
If deg x ≡ k, the graph X is said to be a regular
graph of degree k.
Convention : we write q+1 for the degree of a regular
graph.
A subset Eo ⊂ E is said to be an orientation if
E ∪ Eo = E, E ∩ Eo = ∅.
6

Paths
A path in X is a sequence c = (e1, . . . , en) with
t(ei) = o(ei+1) (i = 1, . . . , n − 1). We put
o(c) = o(e1) = the origin of c,
t(c) = t(en) = the terminus of c,
|c| = n = the length of c.
A path c is said to be closed if o(c) = t(c).
—————————————————
Weighted graphs
A weighted graph is a graph X = (V, E) with addi-
tional data mV and mE, where
mV is a positive valued function on V ,
mE is a positive valued function on E
satisfying mE(e) = mE(e)
Weight functions mV , mE are chosen according to
the problem concerned.
7
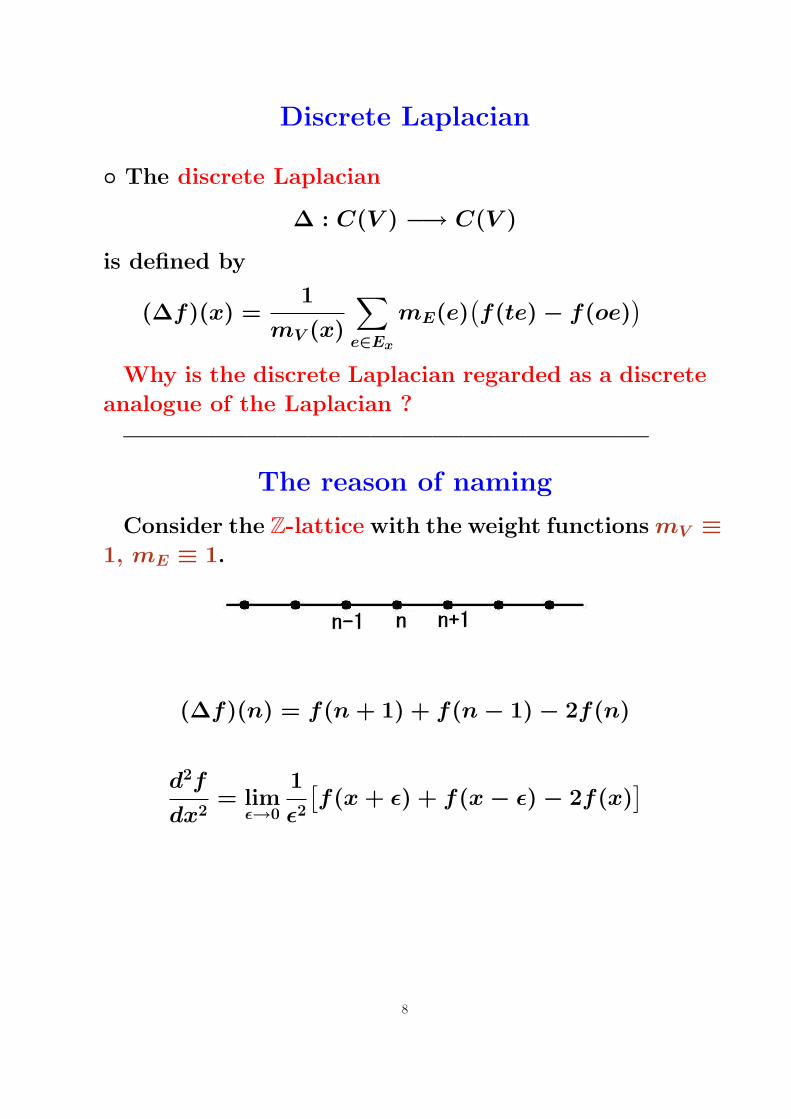
Discrete Laplacian
The discrete Laplacian
∆ : C(V ) −→ C(V )
is defined by
(∆f)(x) =1
mV (x)
∑
e∈Ex
mE(e)(f(te) − f(oe)
)
Why is the discrete Laplacian regarded as a discrete
analogue of the Laplacian ?
—————————————————
The reason of naming
Consider the Z-lattice with the weight functions mV ≡1, mE ≡ 1.
(∆f)(n) = f(n + 1) + f(n − 1) − 2f(n)
d2f
dx2= lim
ε→0
1
ε2
[f(x + ε) + f(x − ε) − 2f(x)
]
8

Another expression of the discrete Laplacian
∆ = −δd
where
d : C(V ) −→ C−(E) = ω : E → R; ω(e) = −ω(e)is the operator defined by
df(e) = f(te) − f(oe),
a dscrete analogue of the exterior differentiation.
—————————————————
δ : C−(E) −→ C(V )
is the (formal) ajoint of d with respect to the inner
products on C(V ) and C−(E) defined respectively by
〈f1, f2〉 =∑
x∈V
f1(x)f2(x)mV (x),
〈ω1, ω2〉 =1
2
∑
e∈E
ω1(x)ω2(x)mE(e)
Explicitly
(δω)(x) = − 1
mV (x)
∑
e∈Ex
mE(e)ω(e)
∆ is symmetric and non-positive. Ker ∆ = Ker d
consists of constant functions.
9

Example 1 Harmonic oscillators
V = a set of particles,
E = a system of harmonic oscillators,
mE(e) = the “spring” constant,
mV (x) = the mass of x
—————————————————
Let Φ(x) ∈ R3 be the position of x. The potential
energy is
U(Φ) =1
2
∑
e∈E
mE(e)‖Φ(te) − Φ(oe)‖2.
The equation of motion is
mV (x)d2Φ(x, t)
dt2=
∑
e∈Ex
mE(e)[Φ(te, t) − Φ(oe, t)
]
Written asd2Φ
dt2= ∆Φ
10
Elementary fact 1
Let X be a finite weighted graph. Given g ∈ C(V ),
the equation (a discrete analogue of the Poisson equa-
tion)
∆f = g
has a solution f ∈ C(V ) if and only if
∑
x∈V
g(x)mV (x) = 0.
(a consequence of Image ∆ = (Ker ∆)⊥).
f is uniquely determined up to an additive constant.
—————————————————
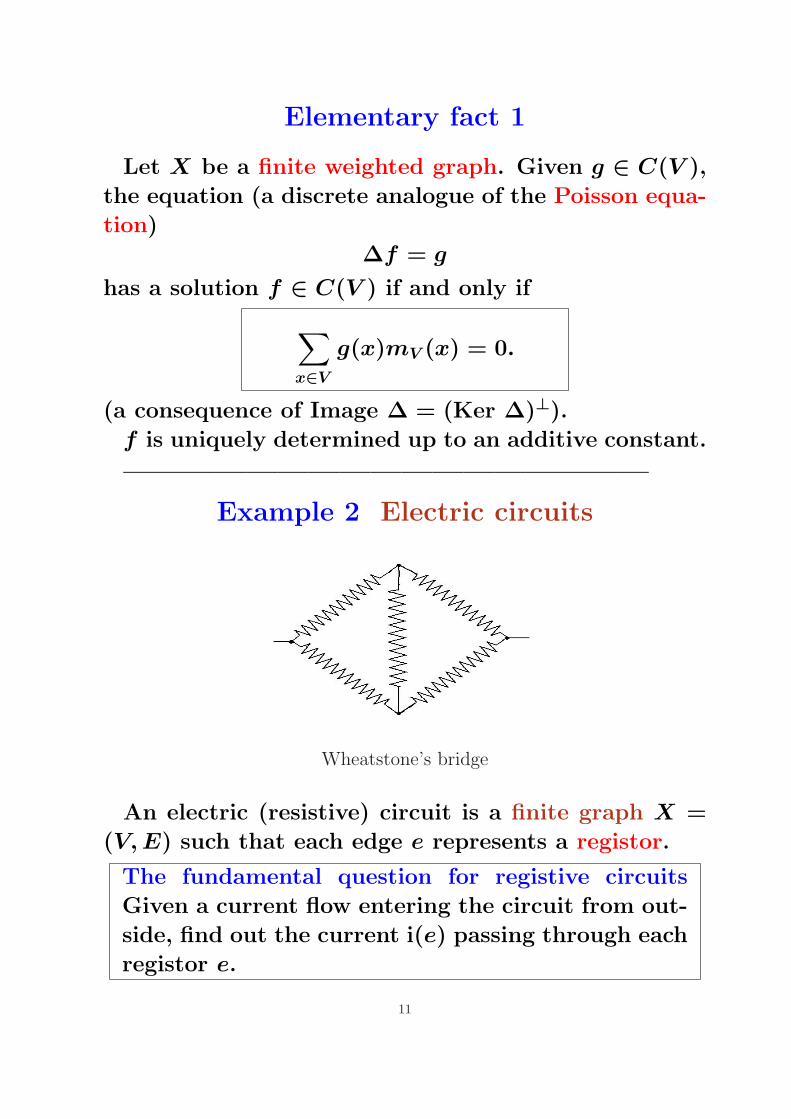
Example 2 Electric circuits
Wheatstone’s bridge
An electric (resistive) circuit is a finite graph X =
(V, E) such that each edge e represents a registor.
The fundamental question for registive circuits
Given a current flow entering the circuit from out-
side, find out the current i(e) passing through each
registor e.
11

The question reduces to solving the equation ∆f = g
with the weight functions
mV (x) ≡ 1,
mE(e) = r(e)−1
where r(e) is the resistance of the resistor e (r(e) =
r(e)).
—————————————————
The meaning of g and f
g ∈ C(V ) represents an external current to flow into
the circuit.
|g(x)| = the strength of the current
entering (g(x) > 0) or leaving (g(x) < 0)
the circuit at the vertex x,
f is a electrical potential so that v(e) = df(e) is the
voltage (potential difference). By Ohm’s law,
i(e) = r(e)−1v(e)
gives the current paasing through e.
12

Conclusion
A steady flow of electricity takes place if and only if
∑
x∈V
g(x) = 0,
that is, the total amount (algebraic sum) of currents
entering the circuit from outside is zero.
Since the potential f is uniquely determined up to
additive constants, the current (and hence the voltage)
is also uniquely determined.
—————————————————
Deduction of the Poisson equation
Let i(e) and v(e) be the current and voltage. From
their nature, i, v ∈ C−(E), and v(e) = r(e)i(e) by
Ohm’s law.
Kirchhoff’s current law: The algebraic sum at any
vertex x of all currents entering or leaving x from
both inside and outside should be equal to 0 (elec-
tric charge can neither be created nor destroyed)
∑
e∈Ex
i(e) − g(x) = 0 (x ∈ V ).
13

Kirchhoff’s voltage law: For every closed path c =
(e1, e2, . . . , en),
n∑
i=1
v(ei) = 0.
The voltage law is equivalent to that there is a func-
tion f ∈ C(V ) such that v = df (Exercise).
These discussions lead us to the Poisson equation.
—————————————————
Example 3: Dehn’s theorem (1903)
Let K be a rectangle, and consider a dissection of K
into finitely many small rectangles.
a
b
c
d
e
f
g
1 2 4 5
3
Theorem If K can be divided into finitely many
rectangles with rational ratio of two adjacent sides,
then the ratio of two adjacent sides of K is rational.
Note that the converse is trivial.
14

In particular, if K can be divided into squares, then
the ratio of two adjacent sides of K is rational
Let K be a rectangle with vertical length 1 and hor-
izontal length a.
—————————————————
Description of the configuration of small rectangles
V = the set of all vertical line segments
Eo = the set of all small rectangles,
o(e) = the vertical line segment containing
the left side of the small rectangle e,
t(e) = the vertical line segment containing
the right side of the small rectangle e.
15

-@@
@@R
¢¢¢¢¢¢¢
¢¢
AA
AA
AAA
AAU¡
¡¡¡
µ
©©©©©©©*
HHHHHHHj
r r
r
r ra
b
c
d
ef
g1
2 4
5
3
We assign the following weight functions.
mV ≡ 1,
mE(e) = mE(e) =`v(e)
`h(e)∈ Q (⇐ Assumption)
16

Let x0 and y0 be two vertices representing the left
and right vertical sides of K, respectively. Define func-
tions f and g on V by setting
f(x) = distance between x0 and
the vertical line segment x,
g(x) =
1 if x = x0
−1 if x = y0
0 otherwise.
Note that f(y0) − f(x0) = a.
—————————————————Lemma ∆f = g
Proof Since f(t(e)) − f(o(e)) = `h(e), we get
mE(e)[f(te) − f(oe)
]= `v(e)
(1) if x 6= x0, y0, then∑e∈Eo
o(e)=x
`v(e) =∑e∈Eo
t(e)=x
`v(e)
= the length of the line segment x,
(2)∑e∈Eo
o(e)=x0
`v(e) =∑e∈Eo
t(e)=y0
`v(e) = 1 (= the length of the
left and right vertical sides of K).
Therefore we have
∆f(x) =∑e∈Eo
o(e)=x
`v(e) −∑e∈Eo
t(e)=x
`v(e) = 0
17

for all x 6= x0, y0 and
∆f(x0) =∑e∈Eo
o(e)=x0
`v(e) = 1,
∆f(y0) = −∑e∈Eo
t(e)=y0
`v(e) = −1,
from which ∆f = g follows.
18

Finishing the proof
Since mE(e) ∈ Q, g(x) ∈ Q, the equation ∆f = g
reduces to a linear equation Ax = b such that the
matrix A and the vector b have rational entries (take
the basis δxx∈V of C(V )).
Use the following fact to get a Q-valued function f0
with ∆f0 = g.
If Ax = b has a real solution, then it has rational
solution.
From the uniquness of solutions, it follows that
a = f(y0) − f(x0) = f0(y0) − f0(x0) ∈ Q
—————————————————
Historical Remark
The Laplacian-method for electric circuits mentioned
here was essentially given by H. Weyl (1923) (a proto-
type of his “orthogonal projection method” in theory
of “harmonic integral”), and was rediscovered 25 years
later by R. Bott in his thesis (1948). Even after that,
it has been rediscovered many times.
Dehn’s original proof [1] is complicated. A proof
relying on the idea of electric circuits was given by R.
Brooks, C. Smith, A. Stone and W. Tutte [2] in 1940.
The proof here is a modification of their proof.
Kirchhoff’s theory is regrded as a prototype of “al-
gebraic topology” developed by H. Poincare.
19

References
[1] M. Dehn: Zerlegung von rechtecke in rechtecken, Mathematische An-nalen, 57(1903) 314-332.
[2] R. L. Brooks, C. A. B. Smith, A. H. Stone, and W. T. Tutte: Thedissection of rectangles into squares, Duke Math. J., 7(1940), 312-340.
20

Elementary fact 2
A subset S ⊂ V is said to be thin if
1. Any vertices x, y ∈ V \S can be joined by a path
not passing through S.
2. For any x ∈ S, there exists e ∈ E such that
o(e) ∈ S, t(e) ∈ V \S.
—————————————————
Theorem (Maximum principle) Let X be a (finite
or infinite) weighted graph, and S be a thin subset.
If f ∈ C(V ) satisfies ∆f = 0 on V \S, and if f
attains its maximum (or minimum) on V \S, then
f is constant.
Proof Let x0 ∈ V \S be a vertex where f attains its
maximum. Since∑
e∈Ex0
mE(e)[f(te) − f(x0)
]= mV (x0)(∆f)(x0) = 0,
we observe that f(te) = f(x0) for every e ∈ Ex0. The
thinness assures that f is constant.
21

Corollary Let X be a finite weighted graph, and
S be a thin subset. If f ∈ C(V ) satisfies
∆f = 0 (on V \S)
f = 0 (on S),
then f = 0.
Theorem Under the same situation as in the corol-
lary above, for every g ∈ C(V \S) and h ∈ C(S), the
“boundary value problem”
∆f = g (on V \S)
f = h (on S),
has a unique solution f ∈ C(V ).
Proof Consider the linear map T : C(V ) −→ C(V )
defined by
(Tf)(x) =
(∆f)(x) (on V \S)
f(x) (on S)
By the corollary above, T is injective, so that T is an
isomorphism.
22

Theorem Let S be a thin set, and h ∈ C(S). Consider
the functional E on the space F = f ∈ C(V ); f |S =
h defined by E(f) = ‖df‖2. Show that f ∈ F is a
critical function of E if and only if ∆f = 0 on V − S.
Proof Let f ∈ F and g ∈ C(V ) with g|S = 0. Then
f + εg ∈ F for every ε ∈ R, and
E(f + εg) = E(f) + 2ε〈df, dg〉 + ε2E(g)
= E(f) + 2ε〈∆f, g〉 + ε2E(g).
These imply that f is critical if and only if 〈∆f, g〉 = 0
for every g ∈ C(V ) with g|S = 0, from which the
assertion follows.
—————————————————
Example 4 Discrete Laplacians in“Computer Graphics”
The notion of discrete Laplacians shows up in the
“data points modeling” in CG (Computer Graphics)
and CAD (Computer Aided Design).
Idea : From an enormous number of data points real-
ized in R3 which form a PL surface Σ in R3 consisting
of triangular meshes, we want to give a PL map f, with
the least distorsion, from Σ into a fixed region in the
(u, v)-plane.
23

—————————————————
Setting up
Σi, i = 1, . . . , N : triangles in Σ with boundary ∂Σ
g : a PL isomorphism of ∂Σ onto ∂D of
a polygon D ⊂ R2.
f : a PL maps of Σ into R2 with f |∂Σ = g
fi = the extension of f |Σi to an affine map
of the plane Hi containing Σi onto R2.
Define the energy E(f) by
E(f) =N∑
i=1
‖Ti‖2Area(Σi)
where Ti is the linear part of fi and ‖Ti‖ denotes the
Hilbert-Schmidt norm of Ti.
Problem Find a PL map f with the least energy
E(f).
24

Writing Σi = AiBiCi, we have
E(f) =1
2
N∑
i=1
(cot ∠Ai)‖f(Ci) − f(Bi)‖2
+(cot ∠Bi)‖f(Ai) − f(Ci)‖2
+(cot ∠Ci)‖f(Bi) − f(Ai)‖2.
Assumption Every triangle in Σ has acute interior
angles.
X = (V, E) : the 1-skeleton of Σ
1. If an edge AB of Σ does not lie on ∂Σ, then there
exist two triangles in Σ which share the edge AB, say
ABC1, and ABC2.
2. If AB is on ∂Σ, then there is only one triangle in
Σ with the edge AB, say ABC.
25

Define the weight function by setting
mV ≡ 1,
mE(AB) =
12(cot ∠C1 + cot ∠C2) (1)
12cot ∠C (2)
We then have the following expression:
E(f) = ‖df‖2,
from which we conclude that, if f = (f1, f2) gives the
least energy, then ∆f1 = ∆f2 = 0 on the set of vertices
in Σ − ∂Σ.
References
[1] M. Eck, T. DeRose, T. Duchamp, H. Hoppe, M. Lounbery and W.Stuetzle: Multiresolusion analysis of arbitrary meshes, Proc. ACMSIGGRAPHS95, (1995), 173-182.
[2] M. Eck and H. Hoppe : Automatic reconstruction of B-spline surfacesof arbitrary topological type, Proc. ACM SIGGRAPHS96, (1996), 325-334.
26

Appendix
Static condenser circuits
Each edge e represents a condenser with capacity
c(e) = c(e) > 0 so that the electric charge q(e) stored
in e is
q(e) = c(e)v(e)
where v(e) is voltage between both ends.
Let g ∈ C(V ) represent external electric charge to
flow into the circuit.
Problem Find electric charge stored in each con-
denser in the circuit.
Kirchihoff’s voltage law =⇒ v = df
conservation of electric charges =⇒∑
e∈Ex
q(e) = g(x)
Thus we have∑
e∈Ex
c(e)[f(te) − f(oe)
]= g(x)
27

General electric circuits
An electric circuit with three kinds of branchs:
1. resistors,
2. capacitors (condensers),
3. inductors (coils),
The electricity (currents and voltages) in the circuit
is supposed to be oscillating.
—————————————————
Functions of registors, capacitors and inductors
1. a resistor
v(t, e) = r(e)i(t, e).
2. a capacitor is a branch e which yields the relation
c(e)dv(t, e)
dt= i(t, e),
where the constant c(e) is called the capacitance.
3. an inductor is a branch e which yields relation
`(e)di(t, e)
dt= v(t, e),
where `(e) is called the inductance.
The inductance and capacitance are assumed to sat-
isfy
`(e) = `(e), c(e) = c(e).
28

Problem Determine the steady-state (oscillating) be-
havior of the electricity when we are given a current
g = g(t, e) entering the circuit from outside.
Assume that the current g is complex-valued and
has the sinusoidal form
g(t, x) = g(x) · exp√−1ωt,
and to find out special solutions of the same form
v(t, e) = v(e) · exp√−1ωt,
i(t, e) = i(e) · exp√−1ωt.
The real number ω/2π is called the frequency. Note
that the amplitudes g(x), i(e), v(e) satisfy the Kirch-
hoff law.
The general solutions are obtained from those special
solutions by means of superpositions (Fourier transfor-
mation).
The relations between amplitudes are
v(e) = r(e)i(e) (for a resistor e),
v(e) =√−1ω · `(e)i(e) (for an inductor e),
v(e) =1√−1ω · c(e)
i(e) (for a capacitor e).
The unified expression :
v(e) = Z(ω, e) · i(e).
where Z(ω, e) is called the impedance(or complex re-
sistance) of the branch e. The inverse Y (ω, e) =
Z(ω, e)−1 is called the admittance. Note that Y (ω, e) =
Y (ω, e) for every edge e.
29

Taking f ∈ C(V ) with v = df , we have∑
e∈Ex
Y (ω, e)f(t(e)) − f(o(e)) = g(x).
Define the complex Laplacian ∆Y : C(V ) −→ C(V )
by
∆Y f(x) =∑
e∈Ex
Y (ω, e)f(t(e)) − f(o(e)).
A frequency ω/2π is said to be a resonant frequency
of the circuit if ∆Y f = 0 has a non-constant solution
f . For a resonant frequency, currents can flow even
though there is no sources from outside.
If ω/2π is not a resonant frequency, then v and i are
uniquely determined.
30

The Second Lecture
The topics covered in the second lectureare:
Combinatorial Laplacians
Counting closed paths
Statistics of eigenvalues of finite regular graphs
Generalizations of discrete Laplacians
———————————————
“Small” algebraic topology
Throughout graphs are supposed to be finite unless
otherwise stated.
Cohomology groups
The operator d : C(V ) −→ C−(E) is nothing but the
coboundary operator in cohomology theory, denoted
usually as
d : C0(X,R) −→ C1(X,R).
The cohomology groups are defined as
H0(X,R) = Ker d(= R),
H1(X,R) = C1(X,R)/Image d
31

ω ∈ C−(E) = C1(X,R) is said to be a harmonic
1-form if δω = 0.
Let H1(X) be the space of harmonic 1-forms.
Discrete Hodge-Kodaira Theorem If X is finite,
then the inclusion H1(X) ⊂ C1(X,R) induces an
isomorphism H1(X) ∼= H1(X,R).
We need to modify this theorem when we treat “non-
symmetric random walks”.
Exercise An edge e separates X if and only if ω(e) = 0
for every ω ∈ H1(X).
—————————————————
Homology groups
Let A be an abelian group (for insatnce, A = Z,R).
The the group of 0-chains
C0(X, A) = ∑
x
axx; ax ∈ A
The the group of 1-chains
C1(X, A) = ∑
e
aee; ae ∈ A/〈e + e〉
The boundary map ∂ : C1(X, A) −→ C0(X, A) is
defined by
∂e = t(e) − o(e)
32

The homology groups are defined as
H0(X, A) = C0(X, A)/Image ∂,
H1(X, A) = Ker ∂ (⊂ C1(X, A))
The Euler number
χ(X) = dim H0(X,R) − dim H1(X,R)
= #V − #E/2
A closed path c = (e1, . . . , en) gives rise to the ho-
mology class e1 + · · · + en ∈ H1(X,Z).
Each α ∈ H1(X,Z) is represented by a closed path.
H1(X,Z) is a lattice (group) of H1(X,R)
———————————————
Spanning trees
A spanning tree T is a subtree of X containng all
vertices of X.
By contracting a spanning tree T to a point, one
gets a bouquet graph with n loop edges, where n is
the number of non-oriented edges not in T .
33

X has the same homotopy type with the bouquet
graph. Therefore the number of unoriented edges not
in T is equal to dim H1(X,R).
———————————————
Fundamental groups and covering graphs
The fundamental group π1(X) of a graph X is iso-
morphic to a free group.
A covering space of a graph is also graph.
Graph-theoretic definition of covering graphs Let X =
(V, E), and X0 = (V0, E0). A pair of maps (ϕ, ψ) is
said to be a covering map if
1. ϕ : V −→ V0 and ψ : E −→ E0 are surjective,
2. o(ψ(e)
)= ϕ
(o(e)
), t
(ψ(e)
)= ϕ
(t(e)
),
3. ψ(e) = ψ(e),
4. for every x ∈ V , the restriction ψ : Ex −→ E0,ϕ(x)
is a bijection.
34

Write XG→ X0 for a regular covering graph X over
a graph X0 with covering transformation group G.
When G is abelian, XG→ X0 is said to be an abelian
covering graph.
The universal covering graph of X0 is a regular
covering graph XG→ X0 with G = π1(X0). This being
the case, X is tree.
For a regular covering graph XG→ X0, there exists
a surjective homomorphism ρ : π1(X) −→ G.
——————————————–
Homology and graph-invariants
Let X = (V, E) be a finite connected graph. De-
fine the Z-valued positive definite bilinear form on
C1(X,Z) (and on H1(X,Z)) by setting, for e, e′ ∈ E,
e · e′ =
1 e = e′
−1 e = e′
0 otherwise
and extend it to H1(X,R) as an inner product.
Let K(X) be the number of spanning trees of X
(called the complexity). Let c1, · · · , cn be a Z-basis of
H1(X,Z). Then
det((ci · cj)
)= K(X).
The volume of the flat torus H1(X,R)/H1(X,Z) is
equal to K(X)1/2
35

The minimal length of simple closed paths (circuits)
is called the girth of X, and is denoted by girth(X).
girth(X) = minα · α; α 6= 0 ∈ H1(X,Z).
References
[1] N. Biggs: Algebraic Graph Theory, Cambridge University Press, 1993.
[2] B. Bollobas: Modern Graph Theory, Springer-Verlag, New York, 1998.
36

Example 5 Discrete Laplacians forcombinatorics
This is the case where mV ≡ 1, mE ≡ 1 (the case of
“no weights”).
(∆f)(x) =∑
e∈Ex
[f(te)−f(oe)
]= (Af)(x)−(deg x)f(x)
A is the adjacency operator.
If X is a regular graph of degree k, then
∆ = A − kI.
A shows up often in counting problems of closed
paths.
(Anf)(x) =∑
c; o(c)=x|c|=n
f(tc)
so that
tr An = #c; closed paths with |c| = n,
Much subtle is counting closed geodesics.
37

Counting closed geodesics
A path c = (e1, . . . , en) is called a geodesic if ei 6=ei+1 for i = 1, . . . , n − 1
A path c = (e1, . . . , en) is called a closed geodesic if
ei 6= ei+1 for all i ∈ Z/nZ.
The m-multiple cm of a closed geodesic c is obtained
by repeating c m-times. If c is not a m-multiple of a
closed geodesic with m ≥ 2, c is said to be prime.
Two prime closed geodesics are said to be equivalent
if one is obtained from another by a cyclic permuta-
tion of edges. An equivalence class of a prime closed
geodesic is called a prime cycle.
———————————————
Ihara zeta functions
Z(u, X) = Z(u) =∏
p∈P
(1 − u|p|)−1,
where P denotes the set of all prime cycles.
Theorem 2.A (H. Bass [2])
Z(u) = (1 − u2)χ(X) det(I − uA + u2(D − I)
)−1,
where (Df)(x) = (deg x)f(x).
In particular, if X is a finite regular graph of degree
q + 1 with N = #V , then
Z(u) = (1 − u2)(1−q)N/2 det(I − uA + qu2I
)−1
38

Idea of Proof ([9])
Reduce Theorem 2.A to counting “admissible” prime
cycles in an oriented graph (the oriented line graph).
Let Xo = (V, Eo) be a general oriented graph. An
admissible path c = (e1, · · · , en) is a path with ei ∈Eo. Admissible prime cycles are defined in the same
manner as prime cycles.
Define the operator L : C(V ) −→ C(V ) by
(Lf)(x) =∑
e∈Eox
f(t(e)),
where Eox = e ∈ Eo; o(e) = x.
Let Nm be the number of admissible closed paths
in Xo with length m. Then
tr Lm = Nm
and hence
exp
( ∞∑m=1
1
mNmum
)= det(I − uL)−1
Show that
exp
( ∞∑m=1
1
mNmum
)=
∏
p∈P o
(1 − u|p|)−1(= Z(u, Xo))
where P o denotes the set of all admissible prime cy-
cles. Thus Z(u, Xo) = det(I − uL)−1.
Introduce the oriented line graph XoL = (VL, Eo
L)
associated with X by setting
VL = E,
EoL = (e1, e2) ∈ E × E; e1 6= e2, t(e1) = o(e2),
39

(namely, EoL is the set of geodesics of length 2). The
incidence map (o, e) : EoL −→ VL × VL is induced from
the identity map of E × E.
Remark In the “ordinary” line graph XL, vertices of
XL are unoriented edges of X and edges of XL are
pairs of edges in X which have exactly one vertex in
common.
Observe that there is a 1-to-1 correspondence be-
tween P and P o, and that Z(u, X) = Z(u, XoL).
Find a relation between I − uL : C(E) −→ C(E)
and I − uA + u2(D − I) : C(V ) −→ C(V ) to obtain
det(I − uL) = (1 − u2)−χ(X) det(I − uA + u2(D − I)).
Exercise Let X be a regular graph od degree q+1. Define An (n ≥0) acting on `2(X) by
(Anf)(x) =∑
c;geodesic|c|=n,o(c)=x
f(t(c)).
(note that A0 = I, A1 = A). Show
A21 = A2 + (q + 1)A0,
A1An = An+1 + qAn−1 (n ≥ 2)
(cf. J. P. Serre [12]).
40

Poles of zeta functions(the case of regular graphs)
The poles of Z(u) except for ±1 coming from the
factor (1 − u2)(1−q)N/2 are
u =µ ±
√µ2 − 4q
2q
where µ are eigenvalues of A.
Eigenvalues of A are
q + 1 = µ0 ≥ µ1 ≥ · · · ≥ µN−1 ≥= −(q + 1),
where N = #V is the number of vertices. µN−1 =
−(q + 1) if and only if X is bipartite.
———————————————
Bipartite graphs
A graph X = (V, E) is said to be bipartite (with a
bipartition V = A∐
B) if o(e) ∈ A, then t(e) ∈ B,
and vice versa.
Exercise Show that the maximal abelian covering graph of afinite graph is always bipartite.Exercise Show that, if X is bipartite, then A and −A areunitarily equivalent.
41

1. Real poles u correspond to µ with |µ| ≥ 2√
q,
and satisfy q−1 ≤ |u| ≤ 1,
2. Imaginary poles corresponds to µ with |µ| < 2√
q,
and are on u ∈ C; |u| = q−1/2.
3. The poles u = q−1 corresponding to µ = q + 1 is
simple, and that u = −q−1 (and u = −1) is a pole if
and only if X is bipartite .
———————————————
Ramanujan graphs
A regular graph of degree q + 1 is called a Ramanu-
jan graph if the zeta function satisfies an analogue of
“Riemann Hypothesis”; that is, every poles u except
for ±q−1, ±1 are on u ∈ C; |u| = q−1/2, or equiva-
lently, every eigenvalue µ except for ±(q + 1) satisfies
|µ| ≤ 2√
q
42
Relation to graph-invariants
Theorem 2.B (K. Hashimoto, H. Bass) If X is a
non-circuit graph, then u = 1 is a pole of Z(u) of
order n = dim H1(X,R), and
limu→1
(1 − u)−nZ(u)−1 = 2nχ(X)K(X),
The proof relies on the following equality which is
essentially a result in algebraic graph theory (N. Biggs
[1] and B. Bollobas [2]):
det(−∆|(Ker d)⊥) = NK(X),
where N = #V .
———————————————
Historical Remark
Theorem 2.A for a regular graph was originally es-
tablished by Y. Ihara [8] (1966) in his study of a p-adic
analogue of the Selberg zeta functions. The interpre-
tation in terms of the regular graphs (of degree p + 1)
was suggested by J. P. Serre [12] and carried out in T.
S. [12].
K. Hashimoto and A Hori [4] generalized Ihara’s for-
mula to semi-regular graphs. Theorem 2.A for general
graphs was establised by H. Bass [2].
See A. Terras [14], [15] for comprehensive accounts.
43

Statistics of eigenvalues of finiteregular grahps
Putµ(X) = max|µ1|, . . . , |µN−1| (non-bipartite case)
µ(X) = max|µ1|, . . . , |µN−2| (bipartite case).,
Theorem 2.C(Alon-Boppana) Let XN be a fam-
ily of regular graphs of degree q + 1 on N vertices
with N going to infinity. Then
lim infN→∞
µ(XN) ≥ 2q1/2.
Remark: “Riemann hypothesis” ⇐⇒ µ(X) ≤ 2q1/2.
Let Xn∞n=1 be a family of regular graphs of degree
q + 1 such that limn→∞ girth(Xn) = ∞.Denote
φn([a, b]) = #eigenvalues µ of AXnwith µ ∈ [a, b]
Theorem 2.D limn→∞
1
#Vn
φn([a, b]) =
∫ b
a
φ(µ) dµ
where
φ(µ) =
q + 1
2π
√4q − µ2
(q + 1)2 − µ2(|µ| ≤ 2q1/2)
0 (otherwise)
For the proof, we use the trace formula, an analogue
of the Selberg trace formula for hyperbolic surfaces.
44

A trace formula for finite regular grahps
Let h(θ) be a real analytic function on R satisfying
1. h(θ + 2π) = h(θ)
2. h(−θ) = h(θ)
3. h(θ) is analytically continued to |Im θ| < 12log q +
ε (ε > 0).
Then, for a finite regular graph X0 of degree q + 1
N∑
i=1
h(θi) =2N
πq(q + 1)
∫ π
0
sin2 θ
(q + 1)2 − 4q cos2 θh(θ) dθ
+∑
p∈P
∞∑n=1
|p|q−n|p|/2h(n|p|)
Here
h(k) =1
2π
∫ 2π
0
h(θ)e√−1kθ dθ
µi = 2q1/2 cos θi is an eigenvalue of A
—————————————————
How to deduce Theorem 2.D from the trace formula
The condition on h(θ) assures that
|h(m)| ≤ Cq−m/2(1+δ)
for some C, δ > 0. On the other hand,
#p; |p| = k ≤ k−1N(q + 1)qk
45

so that, since |p| ≥ girth(X0) for every prime cycle p,
∑
p∈P
∞∑n=1
|p|q−n|p|/2|h(n|p|)|
≤ girth(X0)−1N(q + 1)
∞∑m=1
mq−mδ/2
This implies
limn→∞
1
#Vn
#Vn∑
i=1
h(θn,i)
=2
πq(q + 1)
∫ π
0
sin2 θ
(q + 1)2 − 4q cos2 θh(θ) dθ.
Taking h(θ) = e−2t√
q cos θ, we obtain
limn→∞
1
#Vn
#Vn∑
i=1
e−tµn,i =
∫ 2√
q
−2√
q
φ(µ)e−tµdµ,
from which Theorem 2.D follows.
—————————————————
How to prove the trace formula
A rough idea is to use a “primitive” trace formula.
Let XG→ X0 be a regular covering graph over
a finite graph X0, and let k(x, y) be a function on
X × X satisfying k(gx, gy) = k(x, y). For instance,
k(x, y) = f(d(x, y)
)with a function f on Z≥0, where
d is the graph distance.
Define the function k0(x, y) on X0 × X0 by
k0
(π(x), π(y)
)=
∑
g∈G
k(x, gy).
46

Then∑
p∈V0
k0(p, p) =∑
[g]∈[G]
∑
x∈Gg\X
k(x, gx),
where [G] = [g] is the set of conjugacy classes, and
Gg is the centralizer of g in G.
Apply this to the universal covering Xπ1(X0)−→ X0,
and note that
[π1(X0)]\[1] ∼= pn; p ∈ P, n = 1, 2, · · ·
———————————————
Semi-circle law
Suppose a family of regular graphs Xn∞n=1 satisfies
girth(Xn) → ∞, deg Xn = qn + 1 → ∞,√
deg Xn
log girth(Xn)→ 0.
Let
ψn([a, b]) = #eigenvalues µ of AXn such that
µ ∈ [2q1/2n a, 2q1/2
n b]
47

Theorem 2.E limn→∞
1
#Vn
ψn([a, b]) =
∫ b
a
ψ(x) dx
where
ψ(x) =
2π
√1 − x2 (|x| ≤ 1)
0 (otherwise)
This is considered as a statistical result on the argu-
ments of imaginary poles of the zeta functions (com-
pare with the Sato-Tate conjecture on the Weil zeta
functions of elliptic curves over finite fields).
Historical Remark
1. Theorem 2.D is an analogue of the result due
to H. Huber [7] for eigenvalues of the Laplacians on
hyperbolic surfaces.
2. The trace formula for regular graphs is essentially
the same as the one given by G. Ahumada [1]. Trace
formulas with some special test functions h have been
applied to the study of finite regular graphs by many
mathematicians (cf. R. Brooks [3],A. Lubotzky, R.
Philips and P. Sarnak [10]; see also A. B. Venkov and
A. M. Nikitin [16], A. Terras [15]).
48

References
[1] G. Ahumada, Fonctions periodiques et formule des traces de Selbergsur les arbres, C. R. Acad. Sci. Paris 305(1987), 709-712.
[2] H. Bass: The Ihara-Selberg zeta function of a tree lattice, Interna-tional. J. Math., 3(1992), 717-797.
[3] R. Brooks, The spectral geometry of k-regular graphs, J. D’AnalyseMath. 57(1991), 120-151.
[4] K. Hashimoto and A. Hori: Selberg-Ihara’s zeta functions for p-adicdiscrete groups, Advanced Studies in Pure Math., 15(1989), 171-210.
[5] K. Hashimoto: Zeta functions of finite graphs and representations ofp-adic groups, Advanced Studies in Pure Math., 15(1989), 211-280.
[6] K. Hashimoto: On the zeta- and L-functions of finite graphs, Interna-tional. J. Math., 1(1990), 381-396.
[7] H. Huber, Ober das Spektrum des Laplace-perators auf kompakten Rie-mannschen Flachen, Comment. Math. Helv. 57(1982), 627-647.
[8] Y. Ihara: On discrete subgroups of the two by two projective lineargroup over p-adic fields, J. Math. Soc. Japan, 18(1966), 219-235.
[9] M. Kotani and T. Sunada: Zeta functions of finite graphs, J. Math.Sci. Univ. Tokyo, 7(2000), 7-25.
[10] A. Lubotzky, R. Philips and P. Sarnak, Ramanujan conjectures andexplicit construction of expanders, Proc. Symp. on Theo. of Comp.Sci. 86(1986), 240-246.
[11] J. P. Serre: Trees, Springer-Verlag, New York, 1980.
[12] T. Sunada: L-functions in geometry and some applications, SpringerLecture Notes in Math. 1201, 1986, pp.266-284.
[13] T. Sunada: Fundamental groups and Laplacians, Proc. of TaniguchiSympos., Geometry and Analysis on Manifolds, 1987, Springer LectureNotes in Math. 1339, 1986, pp.248-277.
[14] A. Terras, Survey of spectra of Laplacians on finite symmetric spaces,Experiment Math. 5(1996), 15-32.
49

[15] A. Terras, A survey of discrete trace formulas, IMP Vol. Math. andAppl. 109(1999), 643- 681.
[16] A. B. Venkov and A. M. Nikitin, The Selberg trace formula, Ramanu-jan graphs and some problems of mathematical physics, PetersburgMath. J. 5(1994), 419-484.
50

Various discrete Laplacians we have
encoutered
Laplacian for harmonic oscillators mV , mE are gen-
eral.
Laplacian for registive electric circuits mV ≡ 1
Canonical Laplacian mV (x) = deg x, mE ≡ 1
Combinatorial Laplacian mV ≡ 1, mE ≡ 1
———————————————
Genaralizations of discreteLaplacians
1. (Elastic discrete Laplacians)
(2f)(x) =1
mV (x)
∑
e∈Ex
A(e)(f(te) − f(oe)
)
where f ∈ C(V,Rn) and A(e) ∈ M(n) with A(e) =tA(e). This is a discrete analogue of a differential op-
eratorn∑
i,j=1
∂
∂xi
(Aij
∂
∂xj
),
which appears in lattice vibrations of crystals.
51

2. (Random walk Laplacians)
A random walk (RW) on a (finite or infinite) graph
X = (V, E) is a stochastic process with values in V
characterized by a transition probability
p : E −→ R,
where
p(e) ≥ 0,∑
e∈Ex
p(e) = 1,
p(e) + p(e) > 0
We think of p(e) to be the probability that a “par-
ticle” at o(e) moves to t(e) along e in unit time.
The transition operator L : C(V ) −→ C(V ) is de-
fined by
(Lf)(x) =∑
e∈Ex
p(e)f(te)
The RW Laplacian is defined by ∆ = L − I, that is,
(∆f)(x) =∑
e∈Ex
p(e)[f(te) − f(oe)
].
When there exists a positive-valued function mV on
V such that p(e)mV (oe) = p(e)mV (te), the RW is said
to be symmetric.
The discrete Laplacian for the weight functions mV
and mE defined by mE(e) = p(e)mV (oe) coincides
with the RW Laplacian ∆ = L − I
52

The simple random walk on X is a RW with the
transition probability defined by
p(e) =1
deg o(e).
If we put
mV (x) = deg x,
then p(e)mV (oe) = p(e)mV (te) ≡ 1, so that the sim-
ple RW is symmetric. The RW Laplacian for the sim-
ple RW coincides with the canonical Laplacian
(∆f)(x) =1
deg x
∑
e∈Ex
[f(te) − f(x)
]
Remark: In general, a RW Laplacian is not a discrete
Laplacian in the previous sense.
53
Appendix
We shall give a brief account of harmonic analysis
on the regular tree X.
Boundary Fix a vertex o in X, and put
V (n) = x ∈ V ; d(o, x) = nFor each x ∈ V (n), there is a unique y ∈ V (n − 1)
such that d(x, y) = 1, so that one can define a map
πn : V (n) −→ V (n − 1) by setting πn(x) = y. The
boundary of X, which we denote by ∂X, is then de-
fined as the projective limit of (V (n); πn)n=0,1,···. By
Kolmogoroff’s theorem, there exists a (unique) prob-
ability measure µ on ∂X satisfying
µ(ωn−1(x)) = (#V (n))−1 = (q + 1)−1q1−n
for x ∈ V (n), where ωn : ∂X −→ V (n) is the projec-
tion map.
Horosphere Let b = (o, x1, x2, · · · ) ∈ ∂X, and define
the horosphere Hn(b) through b and xn by
Hn(b) = x ∈ V ; d(x, xk) = k−n for sufficiently large kIt is easily checked that
V =⋃
n∈ZHn(b) (disjoint)
Define a function 〈x; b〉 on V ×∂X by putting 〈x; b〉 =
n when x ∈ Hn(b). By the definition of µ, we have∫
∂X
e〈y;b〉 dµ(b) = 1.
54

Fourier transform We set λθ = q1/2e√−1θ, and define
the Fourier transformation of a function f on V with
finite support by
(Ff)(θ, b) =∑
x∈V
f(x)λ−θ〈x;b〉.
We also define
a(θ) = q(q + 1)2 sin2 θ
(q + 1)2 − 4q cos2 θ.
We then have
(1) The mapping f 7→ Ff extends to a unitary iso-
morphism
F : `2(V ) −→ L2([0, π] × ∂X;1
πa(θ)dθdµ(b))
(2) The following inversion formula holds
f(x) =1
π
∫ π
0
∫
∂X
λθ〈x;b〉(Ff)(θ, b)a(θ)dµ(b)dθ
Spectral theorem for A If we put ϕ(θ, b) = 2√
q cos θ,
then
FAF−1 = Mϕ,
where Mϕu = ϕu. In particular, σ(A) = [−2√
q, 2√
q].
Spherical functions Define the spherical function
φθ(x) by
φθ(x) =
∫
∂X
λθ〈x;b〉dµ(b)
which is characterized by the following properties:
(1) Aφθ = 2√
q(cosθ)φθ,
(2) φθ(o) = 1,
55

(3) φθ is radial; namely φθ(x) depends only on d(o, x),
(4) φθ = φ−θ = φθ.
Write f[d(o; x)] = f(x) for a radial function f.
56

The Third Lecture
The aim of the third lecture is to give asurvey on
Spectral theory of a certain class of infinitegraphs,
more specifically
Spectral theory of generalized crystal lat-tices—————————————————
Boundedness of discrete Laplacians
Let X be an infinite weighted graph. Put
`2(V ) = `2(V, mV )
= f ∈ C(V ); ‖f‖2 :=∑
x∈V
|f(x)|2mV (x) < ∞,
`2−(E) = `2
−(E, mE)
= ω ∈ C−(E); ‖ω‖2 :=1
2
∑
e∈E
|ω(e)|2mE(e) < ∞
In general, ∆ : C0(V ) −→ C0(V ) is not extended to
a bounded operator of `2(V ).
57

Define
ρE(e) = mE(e)/mV (oe), ρV (x) =∑
e∈Ex
ρE(e)
so that
(∆f)(x) =( ∑
e∈Ex
ρE(e)f(te))
− ρV (x)f(x)
Moreover put
ρ′V (x) =
∑
e∈E′x
ρE(e)
where E′x is the set of non-loop edges e with o(e) = x.
Theorem 4.A ∆ is extended to a bounded (hermi-
tian) operator if and only if k′ = supx∈V ρ′V (x) <
∞. Indeed
k′ ≤ ‖∆‖ ≤ 2k′.
From now on, we assume
k := supx∈V
ρV (x) < ∞.
58

Principal parts
The operator L : C(V ) −→ C(V ) defined by
(Lf)(x) =∑
e∈Ex
ρE(e)f(te)
is said to be the principal part of the discrete Lapla-
cian.
∆ = L − ρV .
If k = sup ρV < ∞, then L extends to a hermitian
operator of `2(V ), and ‖L‖ ≤ k.
59

Spectra of hermitian operators
Let T be a hermitian operator on a Hilbert space H.
The spectrum of T , denoted by σ(T ), is the set of real
numbers λ satisfying the following condition: There
exists a sequence un∞n=1 in H such that
‖un‖ = 1,
limn→∞
‖(T − λI)un‖ = 0.
This is equivalent to that λ satisfies one of the follow-
ing conditions:
(i) Ker(T − λI) = v ∈ H; Tv = λv 6= 0.
(ii) Ker(T − λI) = 0 ( so the inverse (T − λI)−1
exists) and Image(T − λI) = H but (T − λI)−1 is not
bounded.
In case (i) holds, λ is called an eigenvalue. The set of
all eigenvalues of T is denoted by σp(T ) and is called
the point spectrum. The continuous spectrum σc(T )
of T is defined as the set σ(T )\σp(T ).
Facts Let T be a hermitian operator on H. Then
(1) σ(T ) is a closed bounded subset of R.
(2) If we put
mT = inf〈Tv, v〉; ‖v‖ ≤ 1(= infv 6=0
〈Tv, v〉‖v‖2
),
MT = sup〈Tv, v〉; ‖v‖ ≤ 1(= supv 6=0
〈Tv, v〉‖v‖2
),
then σ(T ) ⊆ [mT , MT ].
60

(3) mT = inf σ(T ), and MT = sup σ(T ). In particu-
lar, mT , MT ∈ σ(T ).
(4) For any dense subspace D of H, we have
mT = infv 6=0v∈D
〈Tv, v〉‖v‖2
, MT = supv 6=0v∈D
〈Tv, v〉‖v‖2
,
(5) lim supn→∞
‖T n‖1/n = max|mT |, |MT | = ‖T‖.
(6) The eigenspaces for different eigenvalues of T are
orthogonal.
—————————————————
The spectral theorem
For every hermitian operator T on a Hilbert space H,
there exists a unique resolution E(λ) of the identity
such that
T =
∫ ∞
−∞λdE(λ) =
∫ MT
mT −0
λdE(λ)
(the spectral theorem).
A family E(λ); −∞ < λ < ∞ of orthogonal projections ofH satisfying the following relations is called a resolution of theidentity .
(1) E(λ) ≤ E(λ′) if λ < λ′,(2) E(λ + 0)(= s − limµ→λ+0 E(µ)) = E(λ),(3) E(−∞)(= s−limµ→−∞ E(µ)) = O, E(∞)( = s-limµ→∞ E(µ)) =
I (the identity map of H).
Given a resolution E(λ) of the identity and a continuousfunction f defined on the interval [a, b], we define
∫ b
a
f(λ)dE(λ)v (v ∈ H)
61

to be the strong limit of the Riemann sum
lim|4|→0
n∑
k=1
f(ξk)(E(λk) − E(λk−1))v,
where4 : a = λ0 < λ1 < . . . < λn = b
is a subdivision of [a, b] and λk−1 ≤ ξk ≤ λk. Furthermore we put
| 4 | = maxλk − λk−1; k = 1, 2, · · · , n.
If a bounded operator S on H commutes with T ,
then SE(λ) = E(λ)S for all λ.
The support of dE is equal to σ(T ). More precisely,
the spectrum of T is characterized by
σ(T ) = λ ∈ R; E(λ − ε) < E(λ + ε) for every ε > 0.
The point spectrum σp(T ) of T is given by
σp(T ) = λ ∈ R; E(λ − 0) < E(λ).
62
The spectrum of a discrete Laplacian and itsprincipal part
k = sup ρV (x); x ∈ V (≤ ∞),
σ(−∆) ⊂ [0, 2k].
σ(L) ⊂ [−k, k].
If X is an infinite graph, then
σ(L) ∩ (−k, 0) 6= ∅,
σ(L) ∩ (0, k) 6= ∅.
If X is bipartite, then σ(L) is symmetric around 0.
—————————————————
Laplacians for symmetric random walks
The discrete Laplacian ∆ with weight functions mV , mE
is said to be a SRW Laplacian (Laplacian for a sym-
metric random walk) if ρV ≡ 1. This being the case,
∆ = L − I
ρE(e) = mE(e)/mV (oe) is considered as a transition
probability of a symmetric RW.
In fact, when we put p(e) = ρE(e), m(e) = mV (e),
we have∑
e∈Exp(e) = 1 and p(e)m(oe) = p(e)m(te)
(=
mE(e)).
The canonical discrete Laplacian is a SRW Lapla-
cian.
63

A SRW Laplacian ∆ is always bounded, and σ(−∆) ⊂[0, 2] (σ(L) ⊂ [−1, 1]).
Exercise (1) Let ∆ be a SRW Laplacian on X. Show that, if X
is bipartite, then −∆ and ∆ + 2I are unitarily equivalent. Inparticular, σ(−∆) = 2 − σ(−∆) so that σ(−∆) is symmetricaround 1 (recall that σ(−∆) ⊂ [0, 2]). Thus, if, in addition, X isfinite, then 2 is an eigenvalue.
(2) Show that, if 2 is an eigenvalue of a SRW Laplacian on afinite graph X, then X is bipartite.
—————————————————
A big question
What can we say about the spectrum ofa discrete Laplacian ∆ on an infinite graph?
Has eigenvalues ? Has a band structure (i.e. Does
σ(∆) consist of finitely many intervals) ?
Seems impossible to give a genaral answer unless we
restrict ourselves to a special class of infinite graphs.
64

Examples
Consider the case of canonical discrete Laplacians
(thus enough to look at the spectra of their principal
parts).
(1) Let X be a regular tree of degree q + 1.
σ(L) =[
− 2√
q
q + 1,
2√
q
q + 1
](σ(A) = [−2
√q, 2
√q])
(2) Let X be the standard n-dimensional lattice (V =
Zn).
σ(L) = [−1, 1].
(3) (K. Fujiwara) Let X be a rapidly branching tree.
Then L is a compact operator so that σ(L) consists of
eigenvalues of finite multiplicity (except for 0).
Figure 1: σ(−∆)
A graph X is said to be rapidly branching if
supK⊂V
infx∈Kc
deg x = ∞,
where K runs over all finite subsets of V .
65

Generalized crystal lattices
A class including regular trees and the standard lat-
tices.
Definition An infinite-fold regular covering graph
XG→ X0 of a finite graph X0 is said to be a gener-
alized crystal lattice. G is called a lattice group.
When G is abelian, it is called a crystal lattice.
Among all abelian covering graphs of a given fi-
nite graph X0, there exists a maximal one, that is,
the homology universal covering graph (its covering
transformation group is H1(X0,Z).
If XG→ X0 is an abelian covering graph, there exists
a surjective homomorphism µ : H1(X0,Z) −→ G.
Explicit description of µ
Represent α ∈ H1(X0,Z) by a closed path c0 in X0,
and let c be a lift of c0 in X. Since o(c) and t(c)
project down to the same vertex o(c0) = t(c0), one
can find g ∈ G with t(c) = go(c). Then µ(α) = g.
66

Examples
Cayley graphs
Given a finitely generated group G with a finite set
of generators A, the Cayley graph X = X(G, A) is
constructed in the following way.
V = G, Eo = G × A,
o(g, a) = g, t(g, a) = ga
X(G, A) is a regular covering graph over a bouquet
graph with the covering transformation group G.
X(G, A) is a connected regular graph of degree q+1,
where q = 2|A| − 1.
X(G, A) is a tree if and only if G is a free group
with the basis A.
Classical crystal lattices
Hexagonal lattice
This is a maximal abelian covering graph.
67

Triangular lattice
Kagome lattice
1-dimensional crystal lattice
68

(Integrated) density of states
Let X = (V, E) be a generalized crystal lattice with
G-invariant weight functions mV , mE. Then the dis-
crete Laplacian ∆ : `2(V, mV ) −→ `2(V, mV ) is a G-
equivariant bounded operator.
In general, let T be a G- equivariant bounded opera-
tor of `2(V, mV ) (mV (x) = deg x). Define the G-trace
of T by
trGT =∑
x∈F
t(x, x)mV (x)
where F ⊂ V is a “fundamental set” for the G-action
on V , and
(Tf)(x) =∑
x∈V
t(x, y)f(y)mV (y)
Let
−∆ =
∫λ dE(λ)
be the spectral resolution of −∆, and define
ϕ(λ) = trGE(λ)
This is what we call the (integrated) density of states
for −∆.
The spectrum of −∆ is characterized as
σ(−∆) = λ; ϕ(λ − ε) < ϕ(λ + ε) for every ε > 0
69

Statistics for a tower of covering graphs
We handle the statistics of eigenvalues of canonical
Laplacians on general graphs in a bit special situation.
Let XG→ X0 be an infinite-fold regular covering
graph over a finite graph X0 (a generalized crystal
lattice).
Let
X → · · · → Xi → Xi−1 → · · · → X1 → X0
be a tower of subcovering graphs of X0 such that
Xi −→ X0 is finite-fold. We denote by Gi the covering
transformation group of the covering map X −→ Xi.
Gi is a subgroup of G with finite index, and
G = G0 ⊃ G1 ⊃ G2 · · ·
Define ϕXi(λ) to be the number of eigenvalues of
−∆Xiless than or equal to λ.
Theorem 3.B If⋂∞
i=1 Gi = 1, then
limi→∞
#V0
#Vi
ϕXi(λ) = ϕ(λ)
at all the continuity point of ϕ.
When XG→ X0 is the universal covering graph of a regular
graph X0 of degree q+1, dϕ/dλ is essentially equal to the densityfunction in Theoem 2.D (do a change of variables in view of the
relation−∆ = I − 1
q + 1A ).
70

Spectra of generalized crystal lattices
Let XG→ X0 be a generalized crystal lattice, ∆X
be the canonical Laplacian on X, and ϕ(λ) be the
integrated density of states.
Not much is known about ϕ and σ(−∆X) in general
cases.
Band conjecture For a big class of G, σ(−∆X) con-
sists of finitely many closed intervals (possibly in-
cluding finitely many isolated points).
Let C0(G) be the group algebra. One may identify
C0(G) with a subalgebra of End(`2(G)). Let C∗(G),
the reduced group C∗-algebra, be the completion with
respect to the operator norm.
G is said to have the Kadison property if there exists
a positive constant C such that tr P ≥ C for any non-
zero orthogonal projection P in C∗(G) ⊗ Mn.
If G is a group having the Kadison property, then
σ(−∆) has a band structure.
71

Spectra of crystal lattices
Let XG→ X0 be a crystal lattice (so that G is an
infinite abelian group).
One may assume that G is a free abelian group
(take a finite covering graph of X0 corresponding to
the torsion part if necessary).
Let G be the group of unitary characters (homo-
morphism of G into U(1)). For each χ ∈ G, consider
the “twisted periodic boundary value problem”
−∆Xf = λf,
f(gx) = χ(g)f(x) (g ∈ G).
Let
0 ≤ λ0(χ) ≤ λ1(χ) ≤ · · · ≤ λN−1(χ)
be the eigenvalues of this boundary value problem.
Each λi is a continuous function on G.
Theorem 3.C σ(−∆X) =⋃N−1
i=0 λi(χ); χ ∈ G.
In particular, the band conjecture is true in this
case.
Use the following direct integral decomposition:
∆X =
∫ ⊕
G
∆χdχ
where ∆χ = ∆X
∣∣`2χ (twisted discrete Laplacian), `2
χ =
f ∈ C(V ); f(gx) = χ(g)f(x).
Any χ ∈ G is written as
χ(g) = exp(2π
√−1
∫
Cg
ω)
72

with a harminic 1-form ω, where Cg is a closed path
such that µ(Cg) = g (µ : H1(X0,Z) → G is the homo-
morphism associated with the covering map).
Define ∆ω : C(V0) → C(V0) by
(∆ωf)(x) =1
deg x
( ∑
e∈Ex
e2π√−1ω(e)f(te)
)− f(x)
(∆χ, `2χ) is unitarily equivalent to (∆ω, `2(V0)).
No-gap conjecture For the maximal abelian cov-
ering graph X of a finite regular graph,
σ(−∆X) = [0, 2].
Theorem 3.D (Yu.Higuchi) Let XG→ X0 be the
maximal abelian covering graph of arbitrary finite
graph. If deg x is even for every vertex x ∈ X0,
then σ(−∆X) = [0, 2].
Proof From the assumption, we have a closed path
(Euler path) c in X0 such that every unoriented edge
occurs in c = (e1, . . . , en) once and only once (the
famous solution to “the puzzle of the seven bridges”
due to Euler).
Define ω by setting ω(ei) = 1, ω(ei) = −1. ω is a
harmonic 1-form (∑
e∈E0xω(e) = 0). With this ω,
∑
e∈E0x
exp(2π√−1tω) = (deg x) cos 2πta,
so that ∆tω1 = (cos 2πta−1)1. From this observation,
we conclude σ(−∆X) = [0, 2].
73

Kazhdan distance
Let G be an arbitrary discrete group.
Let ρ : G −→ U(H) be a unitary representation
on a Hilbert space H. Define δ(ρ, 1), the “distance”
between the trivial representation 1 and ρ, by
δ(ρ, 1) = infv∈H
‖v‖=1
supg∈A
‖ρ(g)v − v‖
where A is a finite set of generators.
Let H = `2(G), and let ρr be the (right) regular
representation defined by(ρr(g)f
)(h) = f(hg) (f ∈ H).
Then δ(ρr, 1) = 0 if and only if G is amenable.
74

Amenable groups
A discrete group G is said to be amenable if it has
a (left) invariant mean; that is, a continuous linear
functional m on the Banach space `∞(G,R) satisfying
the following properties :
(1) m(1) = 1,
(2) if f ≥ 0 and f ∈ `∞(G,R), then m(f) ≥ 0, and
(3) m(σf) = m(f), where (σf)(µ) = f(σ−1µ) (σ ∈G, f ∈ `∞(G,R)).
Amenability is equivalent to the following Foelner
condition.
Given ε > 0 and any finite subset K of G, there is a nonemptyfinite subset U of G satisfying (#U)−1 · #[(σU)4U ] < ε for allg ∈ K, where A4B = (A − B) ∪ (B − A)
Solvable groups are amenable. In particular, abelian
groups and nilpotent groups are amanable.
F. P. Greenleaf [6]
75

Let XG→ X0 be a generalized crystal lattice. Given
a unitary representation ρ : G → U(H), define the
Hilbert space `2ρ by
`2ρ = f : V → H; f(gx) = ρ(g)f(x)
The inner product is
〈f1, f2〉 =∑
x∈F
〈f1(x), f2(x)〉H(deg x)
where F is a fundamental set in V for the G-action.
Let ∆ is the canonical Laplacian on X. Extend it to
an operator acting in functions with values in H, and
put ∆ρ = ∆|`2ρ (the twisted discrete Laplacian).
Theorem 3.E Let λ0(ρ) = inf σ(−∆ρ). There exist
positive constants c1, c2 not depending on ρ such
that
c1δ(ρ, 1)2 ≤ λ0(ρ) ≤ c2δ(ρ, 1)2
(∆, `2(V )) is unitarily equivalent to (∆ρr, `2ρr
). There-
fore inf σ(−∆) = 0 if and only if G is amenable.
76

Appendix
Two graphs X1, X2 are said to be isospectral if their
canonical discrete Laplacians have the same eigenval-
ues (we take account of multiplicity).
Let XG→ X0 be a finite-fold regular covering graph
over a finite graph X0, and let H1, H2 be subgroups of
the finite group G.
Theorem Suppose
|H1 ∩ [g]| = |H2 ∩ [g]| (∗)
for every conjugacy class [g] of G. Then the quo-
tient graphs X1 = H1\X and X2 = H2\X are
isospectral.
Remark X1 and X2 are also isospectral with respect
to combinatorial Laplacians and adjacency operators.
For a subgroup H of G, let ρH be the unitary rep-
resentation of G on `2(H\G) induced from the right
translation.
The conditon (*) is equivalent to that (G, ρH1) and
(G, ρH2) are unitarily equivalent.
(∆ρHi, `2
ρHi) is unitarily equivalent to (∆Xi
, `2(Vi)).
77

The Forth Lecture
The topics covered in the forth lecture are
Cheeger inequality for finite graphsCheeger inequality for infinite graphsCheeger inequality “at infinity”Finitely generated groups
———————————————
Cheeger inequalities in Riemannian
geometry
Let M be a complete Riemannian manifold.
Compact case : Let λ1 be the first positive eigenvalue
of −∆. Then
λ1 ≥ h2/4,
where h is the Cheeger constant defined by
h = infvol(∂D)
vol(D); D ⊂ M is a domain
with smooth boundary such that
vol(D) ≤ (1/2)vol(M)
78

Non-compact case : Let λ0 = inf σ(−∆). Then
λ0 ≥ h2/4,
where h is the Cheeger constant defined by
h = infvol(∂D)
vol(D); D ⊂ M is a domain
with smooth boundary
The aim is to discuss discrete analogues of Cheeger
inequalities.
———————————————
Cheeger constant (finite graphs)
Let X = (V, E) be a finite weighted graph. The
edge-boundary of a subset A of V is defined by
∂EA = e ∈ E; o(e) ∈ A, t(e) 6∈ A.
79

The vertex-boundary is ∂V A = t(∂EA).
mE(∂EA) ≤ k · mV (∂V (A)),
mE(∂EA) ≥ s · mV (∂V (A)),
where k = supx∈V
ρV (x) and s = infe∈E
ρE(e).
Recall ρV ∈ C(V ) defined by
ρV (x) =1
mV (x)
∑
e∈Ex
mE(e),
and
k = k(X) = supx∈V
ρV (x).
mE ≡ 1, mV ≡ 1 =⇒ k = supx deg x
mE ≡ 1, mV (x) = deg x =⇒ k = 1
The Cheeger constant h = h(X) is defined by
h = infmE(∂EA)
mV (A); A 6= ∅, mV (A) ≤ (1/2)mV (V )
This is an analogue of the Cheeger constant in Rie-
mannian geometry.
In the case mV ≡ mE ≡ 1,
h = inf|∂EA|
|A| ; A 6= ∅, |A| ≤ (1/2)|V |
80

Cheeger constants in the case mV ≡ 1, mE ≡ 1 is
related to “efficiency” of communication networks.
A = a set of terminals from which information is
carried to all nearst neighbors
∂EA = the set of cables which carries information to
all nearst neighbors
The bigger h is, the more efficient the network is.
———————————————
Cheeger inequality (finite graphs)
Since
ρV (x) ≥ mE(∂Ex)/mV (x),
we have h(X) ≤ k(X).
Let λ1 be the first positive eigenvalue of −∆
Theorem 4.A k − √k2 − h2 ≤ λ1 ≤ 2h.
λ1 is big ⇐⇒ h is big. Thus Ramanujan graphs are
used as models of efficient networks.
81

The first inequality was established by K. Fujiwara,
and F. R. K. Chung and P. Doyle. The second one is
due to R. M. Tanner, N. Alon and V. D. Milman.
We shall use the following characterization of λ1:
λ1 = inf
‖df‖2
‖f‖2; f ∈ C(V ),
∑
x∈V
f(x)mV (x) = 0
.
Remark Making use of the inequality
x2
2≤ 1 − (1 − x2)1/2,
we haveh2
2k≤ k − (k2 − h2)1/2.
Thus
h2/2k ≤ λ1 (J. Dodziuk, N. Alon).
An upper estimate is obtained by choosing a “nice”
test function f . However to find a lower estimate, say
a ≤ λ1, we must check the inequality
a ≤ ‖df‖2
‖f‖2
for all test functions f .
82

Proof of the upper estimate
Take a subset A such that h = mE(∂EA)/mV (A)
and mV (A) ≤ (1/2)mV (V ), and put B = Ac. Write
mV (A) = a and mV (B) = b. We then define a func-
tion f ∈ C(V ) by
f(x) =
b x ∈ A
−a x ∈ B.
∑
x∈V
f(x)mV (x) = b mV (A)−a mV (B) = ba−ab = 0.
‖f‖2 = mV (A)mV (B)mV (V ).
‖df‖2 = mE(∂EA)(mV (V ))2
‖df‖2
‖f‖2=
mE(∂EA)mV (V )
mV (A)mV (B)≤ 2
mE(∂EA)
mV (A)= 2h.
—————————————————
Proof of the lower estimate
Take a nonzero real-valued function ψ defined on V
such that −∆ψ = λ1ψ. Put
V + = x ∈ V ; ψ(x) > 0,
V − = x ∈ V ; ψ(x) < 0,
then V + 6= ∅ and V − 6= ∅.
Without loss of generality, we may assume mV (V +) ≤(1/2)mV (V ).
Let
f0(x) =
ψ(x) if x ∈ V +
0 if x 6∈ V +.
83

Then
‖df0‖2 ≤ λ1‖f0‖2.
For every f ∈ C(V ), we have, by the Schwartz in-
equality
(1/2)∑
e∈E
mE(e)|f(t(e))2 − f(o(e))2|
≤ ‖df‖(2k‖f‖2 − ‖df‖2)1/2.
(Recall that ‖df‖2 ≤ 2k‖f‖2).
(This holds for infinite graphs as long as f ∈ C0(V )).
Put g = f02.
∑
e∈E
mE(e)|g(t(e))−g(o(e))| ≤ 2‖df0‖(2k‖f0‖2−‖df0‖2)1/2.
(the most difficult part) Show that∑
e∈E mE(e)|g(t(e)) − g(o(e))| ≥ 2h‖f0‖2 (∗)
Putting together,
h‖f0‖2 ≤ ‖df0‖(2k‖f0‖2 − ‖df0‖2)1/2.
Therefore, putting α =‖df0‖2
‖f0‖2, we have
h2 ≤ α(2k − α),
and hence
λ1 ≥ α ≥ k − (k2 − h2)1/2.
84

Proof of (∗)
Put
E1 = e ∈ E; g(o(e)) > g(t(e)),
E0 = e ∈ E; g(o(e)) = g(t(e)),
g(V ) = β0, β1, . . . , βr with 0 = β0 < β1 < · · · < βr,
Eik = e ∈ E1; g(o(e)) = βi and g(t(e)) = βk (i > k).
Then E = E1
∐E1
∐E0, E1 =
∐
i>k
Eik and
(1/2)∑
e∈E
mE(e)|g(o(e)) − g(t(e))|
=r∑
l=1
(βl − βl−1)∑
k<l≤i
∑
e∈Eik
mE(e)
Set
Li = x ∈ V ; g(x) ≥ βi, (0 ≤ i ≤ r)
Note that V = L0 ⊃ L1 ⊃ · · · ⊃ Lr and
∪k<l≤iEik = e ∈ E; o(e) ∈ Ll, t(e) 6∈ Ll = ∂ELl.
Therefore we have
(1/2)∑
e∈E
mE(e)|g(o(e)) − g(t(e))|
=r∑
l=1
(βl − βl−1)mE(∂ELl) ≥ h
r∑
l=1
(βl − βl−1)mV (Ll),
where we have used mE(∂ELl) ≥ h · mV (Ll) (l ≥ 1)
(note that mV (Ll) ≤ mV (L1) = mV (V+) ≤ (1/2)mV (V )
for all l ≥ 1).
85

Since
g(x) = βi if x ∈ Li − Li+1,
V = Lr
∐(Lr−1 − Lr)
∐. . .
∐(L1 − L2)
∐(L0 − L1),
we findr∑
l=1
(βl − βl−1)mV (Ll) =∑
x∈V
g(x)mV (x).
Hence
(1/2)∑
e∈E
mE(e)|g(o(e)) − g(t(e))| ≥ h∑
x∈V
g(x)mV (x)
= h∑
x∈V
f0(x)2mV (x)
= h‖f0‖2,
86

Cheeger inequality (infinite graphs)
Let X be an infinite weighted graph.
The Cheeger constant is defined by
h = h(X) = infA⊂V
mE(∂EA)
mV (A),
where the infimum is taken over all finite subsets A of
V .
—————————————————
Example
Consider the case mV ≡ 1, mE ≡ 1 (the case of
combinatorial Laplacians)
If X is regular graph of degree q + 1, then 0 ≤ h ≤q − 1. h = q − 1 if and only if either X is a tree or X
has only one circuit, say C. In the second case, every
component of X − C is a tree.
Let λ0 = inf σ(−∆).
Theorem 4.B: k − (k2 − h2)1/2 ≤ λ0 ≤ h.
In particular, λ0 = 0 if and only if h = 0.
87

Theorem 4.C
σ(−∆) ⊂ [k − (k2 − h2)1/2, k + (k2 − h2)1/2].
In particular, for the canonical Laplacian, we have
σ(−∆) ⊂ [1 − (1 − h2)1/2, 1 + (1 − h2)1/2].
88

Cheeger inequality at infinityEssential spectra
For a hermitian operator T : H −→ H, the set
of isolated points in the spectrum σ(T ) with finite
multiplicity is said to be the discrete spectrum, and
is denoted by σd(T ) (which is a subset of the point
spectrum σp(T )). The closed set σ(T )−σd(T ) is called
the essential spectrum and denoted by σess(T ).
The following three statements are equivalent :
(1) λ ∈ σess(T ).
(2) There exists an orthonormal sequence un in H
such that limn→∞ ‖(T − λI)un‖ = 0.
(3) There exists a sequence un in H such that
‖un‖ = 1, w− limn→∞
un = 0,
limn→∞
‖(T − λI)un‖ = 0.
Compare with the following characterization of σ(T ).
limn→∞
‖un‖ = 1, w− limn→∞
un = 0,
limn→∞
‖(T − λI)un‖ = 0.
A sequence un in `2(V ) converges weakly to 0 if
and only if limn→∞ un(x) = 0 for every x ∈ V . This
gives a flavor of reason why the essential spectrum has
something to do with “geometry at infinity”.
Let ∆ be the canonical Laplacian (or combinato-
rial Laplacian) on a generalized crystal lattice. Then
σ(−∆) = σess(−∆). Indeed, every eigenvalue of ∆
has infinite multiplicity.
89
In particular, σ(A) = σess(A) for the adjacency op-
erator A on the Cayley graph X(G, A) if G is an infi-
nite group.
—————————————————
Cheeger constant at infinity
For a finite subset K of V , define k(K) and h(K) by
k(K) = supx∈Kc
ρV (x),
h(K) = inf
mE(∂EA)
mV A; A ⊂ V, #A < ∞, and A ∩ K = ∅
.
From the definitions, it follows that h(K1) ≤ h(K2) ≤k(K2) ≤ k(K1) provided that K1 ⊂ K2. We put
k∞ = infK⊂V
k(K) (= limK
k(K)),
h∞ = supK⊂V
h(K) (= limK
h(K)),
We call h∞ the Cheeger constant at infinity of X. Note
that h ≤ h∞ ≤ k∞.
Theorem 4.D (1)
σess(∆) ⊂ [k∞ − (k2∞ − h2
∞)1/2, k∞ + (k2∞ − h2
∞)1/2].
(2) inf σess(∆) ≤ h∞.
90

Growth and spectra
Let X be a weighted graph. Pick a vertex x0, and
let bn = mV (Bn(x0)). Define the growth rate of X by
g(X) = lim supn→∞
b1/nn (≤ ∞).
It is obvious that g(X) ≥ 1.
The inequality
g(X) ≥ k−1h + 1
holds ( recall k = supx∈V ρV (x)). In particular, h = 0
if g(X) = 1.
Theorem 4.E (K. Fujiwara [5]) Let ∆ be a canonical
Laplacian on a weighted graph X and g(X) be the
growth rate. If mV (V ) = ∞, then
inf σess(−∆) ≤ 1 − 2
g(X)1/2 + g(X)−1/2,
where2
g(X)1/2 + g(X)−1/2should be understood as
0 when g(X) = ∞.
This theorem improves several previous results given
in J. Dodziuk and L. Karp [3] and Y. Ohno and H.
Urakawa [11].
91

Discrete groups (growth andcogrowth)
Notions and Notations
Let X = X(G, A) be the Cayley graph associated
with an infinite group (G, A). Assume 1 6∈ A. Note
(Af)(x) =∑
a∈A
(f(xa) + f(xa−1)
).
Let A = a; a ∈ A be a disjoint copy of A. We take
up the convention that a = a. A word with letters in
A means either void (denoted by ∅) or a finite sequence
w = (b1, . . . , bn) with bi ∈ A ∪ A.
The length n of a word w = (b1, . . . , bn) is denoted
by |w| (|∅| = 0).
A word w = (b1, . . . , bn) is said to be reduced if
bi+1 6= bi(i = 1, . . . , n − 1).
Denote by g(w)(∈ G) the product b1 · · · bn (g(∅) =
1), where a ∈ A should be understood, as an element
in G, to be a−1.
A path c = (e1, e2, . . . , en) with o(c) = 1 is iden-
tified with a word w = (b1, · · · , bn) where t(ei) =
o(ei)bi, bi ∈ A ∪ A. A geodesic loop c with the
base point 1 is identified with a reduced word w with
g(w) = 1.
92

Growth
This is a special case of the notion of growth (mV ≡1, mE ≡ 1).
The growth sequence bn∞n=0 is defined by
bn = #g ∈ G; there exists a word w with
g = g(w), |w| ≤ n.
Theorem 4.F
(1) b = limn→∞
b1/nn exists
(2) 1 ≤ b ≤ q
(3) If b = 1, then G is amenable.
(4) If G is the free group with the basis A, then
b = q
b = limn→∞ b1/nn is called the growth rate.
A group G with b = 1 (resp. b > 1) is said to have
subexponential growth (resp. exponential growth).
The claim (3) is due to R. Brooks.
The condition h = 0 for amenability is essentially
equivalent to the Foelner condition.
93

Co-growth
Define the sequences mn∞n=0 and `n∞
n=0 by
mn = #w; w is a reduced word with
g(w) = 1 and |w| = n,
`n =n∑
h=0
mh
= #w; w is a reduced word with
g(w) = 1 and |w| ≤ n,
`n is the number of (reduced) relations among ele-
ments in G whose length is less than or equal to n.
The sequence `n∞n=0 is what we call the cogrowth
sequence of (G, A).
Theorem 4.G (G. I. Grigorchuk [7])
(1) ` = limn→∞
`1/nn exists.
(2) 1 ≤ ` ≤ q.
(3) ` = 1 if and only if G is the free group with the
basis A.
(4) ` = q if and only if G is amenable.
(5) If G is not a free group, then q1/2 < ` ≤ q.
Theorem 4.H If G is not free, i.e. if ` > q1/2, then
` ≥ q(b1/2 + b−1/2)
q + 1 −√
q2 + 1 − q(b + b−1).
94

Spectra of Cayley graphs
Theorem 4.I
(1) 2q1/2 ≤ sup σ(A) ≤ q + 1.
(2) sup σ(A) = 2q1/2 if and only if G is a free
group with the basis A.
(3) sup σ(A) = q + 1 if and only if G is amenable.
The inequality 2q1/2 ≤ sup σ(A) is due to K. Fu-
jiwara [5]. The statement (3) is well-known (see H.
Kesten [9] or [17]).
If G is a free abelian group with the basis A, then
σ(A) = [−(q + 1), q + 1]. If G is the free group with
the basis A, then σ(A) = [−2q1/2, 2q1/2].
Spectra and co-growth
Theorem 4.J (1) We have, for z ∈ C with small
|z|,∞∑
n=0
`nzn = trG
(1 + z
1 − Az + qz2
).
(2) If G is not free, then
` =α + (α2 − 4q)1/2
2,
where α = sup σ(A).
95

Theorem 4.K(Y. Higuchi [8]) 2 ≤ − inf σ(A) ≤sup σ(A).
96

Zeta function for a finitely generated group
A word w = (b1, . . . , bn) is said to be cyclically re-
duced if bi+1 6= bi (i = 1, 2, . . . , n − 1) and b1 6= bn.
Given a word w = (b1, . . . , bn), we put
wk = (b1, . . . , bn︸ ︷︷ ︸1
, b1, . . . , bn︸ ︷︷ ︸2
, . . . , b1, . . . , bn︸ ︷︷ ︸k
).
Note that if w is cyclically reduced, then so is wk. A
cyclically reduced word w is said to be prime if there
is no k ≥ 2 with w = wk1 .
Two words w1 and w2 are equivalent if w1 is obtained
from w2 by a cyclic permutation.
We denote by P the set of equivalence classes of
cyclically reduced prime words w with g(w) = 1 and
define the zeta function Z(u) by
Z(u) =∏
p∈P
(1 − u|p|)−1,
where |p| denotes the length of a representative of p.
Theorem 4.L For u ∈ C with small |u|,Z(u) = (1 − u2)−(q−1)/2detG(1 − Au + qu2)−1,
where detG stands for the G-determinant defined
as
detG(T ) = exp trG(log T ).
97

References
[1] M.F.Atiyah: Elliptic operators, discrete groups and von Neumann al-gebras, Asterisque 32-33(1976), 43-72.
[2] R.Brooks: The fundamental group and the spectrum of Laplacian,Comment. Math. Helv. 56(1981), 585-598.
[3] J. Dodziuk and L. Karp: Spectral and function theory for combina-torial Laplacians, Geometry of Random Motion, Contemp. Math. 73,AMS Publication(1988), 25-40.
[4] K.Fujiwara: The Laplacian on rapidly branching trees, Duke Math. J.83(1996) 191-202.
[5] K.Fujiwara: Growth and the spectrum of the Laplacian of an infinitegraph, Tohoku Math. J. 48(1996), 293-302.
[6] F.P.Greenleaf: Invariant Means on Topological Groups and Their Ap-plications, von Nostrand, Reinhold, 1969.
[7] R.I.Grigorchuk: Symmetric random walks on discrete groups in”Multi-component Random Systems,” pp.132-152, Nauk, Moscow,1971.
[8] Yu.Higuchi: Random Walks and Isoperimetric Inequalities on InfinitePlanar Graphs and Their Duals, Dissertation, Univ. of Tokyo, January1995.
[9] H.Kesten: Symmetric random walks on groups, Trans. A.M.S.92(1959), 336-354.
[10] J.Milnor: Growth of finitely generated solvable groups, J. Diff. Geom.2(1968) 447-449.
[11] Y. Ohno and H. Urakawa: On the first eigenvalue of the combinatorialLaplacian for a graph, Interdiciplinary Information Sciences 1(1994),33-46.
[12] J.P.Serre: Tree, Springer-Verlag, New York, 1980.
[13] T.Sunada: Group C∗-algebras and the spectrum of a periodicSchrodinger operator on a manifold, Canad. J. Math. 41(1992), 180-193.
98

[14] T.Sunada: A discrete analogue of periodic magnetic Schrodinger op-erators, Contemp. Math. 173, AMS Publication (1994), 283-299.
[15] T.Sunada: L-functions in geometry and some applications, Proc.Taniguchi Symp. 1985 “Curvature and Topology of Riemannian Man-ifolds”, Springer Lect. Note in Math. 1201(1986), 266-284.
[16] T.Sunada: Fundamental groups and Laplacians, (in Japanese), Ki-nokuniya, 1988.
[17] P.W.Sy and T.Sunada: Geometry and Analysis on Graphs, to be pub-lished.
[18] S.Wagon: Banach-Tarski Paradox, Cambridge Univ. Press, 1985.
99

The Fifth LectureThe topics covered here are
Random walks on finite graphs
Random walks on crystal lattices
Our view point is quite a bit geometric.
———————————————
Random walks
Recall that a random walk (RW) on a (finite or in-
finite) graph X = (V, E) is a stochastic process with
values in V characterized by a transition probability
p : E −→ R,
where
p(e) ≥ 0,∑
e∈Ex
p(e) = 1,
p(e) + p(e) > 0 (∗)
The transition operator L : C(V ) −→ C(V ) is defined
by
(Lf)(x) =∑
e∈Ex
p(e)f(te)
100

Put E+(p) = supp p ⊂ E.
Our assumption (∗) ⇐⇒ E+(p) ∪ E+(p) = E.
“two-way traffic” : E+(p) = E,
“one-way traffic” : E+(p) ∩ E+(p) = ∅“mixed traffic” : E+(p) ∩ E+(p) 6= ∅
A symmetric RW is two-way traffic.
A stochastic process (with discrete time) in general
is a probability space (Ω, P ) together with a family of
maps into a set S
ξn : Ω → S (n = 0, 1, 2, . . .)
For the random walk,
Ω = Ωx = c = (e1, e2, . . .); one-sided infinite paths
with o(c) = x,
S = V, ξn(c) = o(en+1).
The probability measure P = Px is defined in such a
way that, for a given path (e1, . . . , en) of length n,
Px
(c = (e1, , . . . , en, ∗, ∗, . . .))= p(e1) · · · p(en)
101

n-step transition probability
Define the n-step transition probability by
p(n, x, y) = Px(c; ξn(c) = y)
Then
p(n, x, y) = (Lnδy)(x).
p(n + 1, x, y) − p(n, x, y) = ∆p(n, ·, y)
Namely u(x) = p(n, x, y) satisfies a discrete analogue
of the heat equation
∂u
∂t= ∆u
———————————————
A RW on the Z-lattice
p(n, 0, x) =
(n
n + x
2
)p(n+x)/2q(n−x)/2
(n ≡ x (mod. 2))
102

The central limit theorem p(n, 0, x)
=1√
2πnpqexp
(−
(x − (p − q)n
)2
8npq
)(1 + rn(x)
)
where limn→∞
rn(x) = 0 uniformly in x with
|x − (p − q)n| ≤ A√
n.
Large deviation asymptotic Let |ξ| < 1, and Sup-
pose that xn − nξ is bounded. Then
limn→∞
1
nlog p(n, 0, xn) = −H(ξ),
where
H(ξ) = −1
2(1 + ξ) log p − 1
2(1 − ξ) log q − log 2
+1
2(1 + ξ) log(1 + ξ) +
1
2(1 − ξ) log(1 − ξ)
Both central limit theorem and large deviation asymp-
totic are proved by using the Stirling formula for n!.
Question What about p(n, x, y) in general cases ?
103

Irreducibility
A RW is said to be irruducible if, for any x, y ∈ V ,
there exists n with p(n, x, y) > 0
‖For any x, y, one can find a path c = (e1, . . . , en) such
that o(c) = x, t(c) = y and ei ∈ E+(p) = supp p for
every i.
In general, a subset E+ ⊂ E with E = E+ ∪ E+ is
said to be irreducible if it has this property.
A path c = (e1, . . . , en) is said to be admissible with
respect to E+ if ei ∈ E+ for every i.
———————————————
Perron-Frobenius theorem
From now on, X is supposed to be finite.
Given a function ϕ ∈ C(E), consider the operator
Aϕ : C(V ) −→ C(V ) defined by
(Aϕf)(x) =∑
e∈Ex
ϕ(e)f(te).
Theorem Let ϕ be non-negative valued, and suppose
E+(ϕ) = supp ϕ is irreducible.
1. Aϕ has a positive eigenvalue. The maximal one
α among all positive eigenvalues is simple and has a
positive-valued eigenfunction.
2. limn→∞
1
nlog Aϕ
n1 = log α, where 1 denotes the
function identically equal to 1.
104

3. Define
(tAϕf)(x) =∑
e∈Ex
ϕ(e)f(te).
Then α is the maximal positive eigenvalue of tAϕ. In
fact, tAϕL is the adoint operator (transpose) of Aϕ
with respect to the inner product:
〈f1, f2〉0 =∑
x∈V
f1(x)f2(x).
———————————————
Invariant measures
1 is the maximal positive eigenvalue of L with the
eigenfunction 1 (the constant function with value 1).
If the RW is irreducible, then there exists a positive
valued function m ∈ C(V ) such that tLm = m (apply
(3) in the Perron-Frobenius theorem). m is unique up
to a constant multiple.
tLm = m ⇐⇒ ∑x∈V Lf(x)m(x) =
∑x∈V f(x)m(x)
for every f ∈ C(V ).
m is called an invariant measure.
From now on, we consider an irreducible RW on a
finite graphs.
105

Law of large numbers
Let f be a (vector-valued) function on E. Consider
1
n
[f(e1) + · · · + f(en)
]
for c = (e1, e2, . . .) ∈ Ωx. Let m be the normalized
invariant measure (∑
x∈V m(x) = 1).
limn→∞
1
n
[f(e1) + · · · + f(en)
]=
∑
e∈E
p(e)m(oe)f(e)
in probability one.
This is a consequence of the ergodic theorem.
—————————————————
Special cases
f(e) = e ∈ C1(X,R).
limn→∞
1
n
[e1 + · · · + en
]=
∑
e∈E
p(e)m(oe)e
The 1-chain γp =∑
e∈E p(e)m(oe)e is in H1(X,R),
called the homological position (direction).
106

Modified discrete Hodge-Kodaira theorem
Define δ : C1(X,R) −→ C0(X,R) by
(δω)(x) =∑
e∈Ex
p(e)ω(e)
This plays a role of the adjoint (transpose) of d. In-
deed, ∆ = −δd. In symmetric case, δ is actually the
adjoint of d.
Lemma (1) dim Ker δ = b1(X) if and only if
the RW is symmetric. In non-symmetric case,
dim Ker δ = b1(X) − 1.
(2) The RW is symmetric if and only if γp = 0.
Definition ω ∈ C1(X,R) is said to be a (modified)
harmonic 1-form if δω + 〈γp, ω〉 = 0.
Denote by H1(X) the space of harmonic 1-forms.
Theorem The inclusion H1(X) ⊂ C1(X,R) induces
an isomorphism H1(X) ∼= H1(X,R).
107

“Universal” free energy
Let ω ∈ C1(X,R). Let eFuni(ω) be the maximal posi-
tive eigenvalue of the operator Lω defined by
(Lωf)(x) =∑
e∈Ex
p(e)eω(e)f(te)
Funi(ω) = Funi(p, ω) is said to be the universal free
energy.
Lω+du = e−uLωeu so that Funi(p, ω+du) = Funi(p, ω),
and hence Funi(p, ·) induces a function on H1(X,R),
which we denote by the same symbol Funi.
Exercise Let fp,ω be a positive-valued eigenfunction for the max-imal positive eigenvalue eFuni(p,ω) of Lω, that is,
∑
e∈Ex
eω(e)p(e)fp,ω(te) = eFuni(p,ω)fp,ω(x).
(1) Show that, if we put
pω(e) = e−Funi(p,ω)+ω(e)p(e)fp,ω(te)
fp,ω(oe),
then supp pω = E+(p),∑
e∈Ex
pω(e) = 1.
(2) Checked that
Funi(pω, u) = Funi(p, ω + u) − Funi(p, ω)
108

Gradient and Hessian of Funi
Define, for ω, u ∈ H1(X,R),
(∇uFuni)(ω) =d
dt
∣∣∣t=0
Funi(ω + tu),
(HessωFuni)(u, u) =d2
dt2
∣∣∣t=0
Funi(ω + tu),
Theorem (1) (∇uFuni)(0) = 〈γp, u〉(2) For u ∈ H1(X),
(Hess0Funi)(u, u) =∑
e∈E
p(e)m(oe)u(e)2
−( ∑
e∈E
p(e)m(oe)u(e))2
We employ a perturbation technique to prove the
theorem, say, by putting
α(t) = eFuni(p,tu), ft = fp,tu,
differentiate both sides of the following equation∑
e∈Ex
etu(e)p(e)ft(te) = α(t)ft(x).
(ft being unique up to positive multiple constants). In
the discussion, we need to adjust ft by multiplying a
suitable scalar ct.
(Hess0Funi) is non-negative as a quadratic form since
(Hess0Funi)(u, u) =1
2
∑
e1,e2∈E
p(e1)m(oe1)p(e2)m(oe2)
×(u(e1) − u(e2)
)2.
109

Theorem Hess0Funi is positive definite if and only
if E+(p) ∩ E+(p) 6= ∅ (mixed traffic).
In the case of a simple RW,
(Hess0Funi
)(u, u) =
1
m(V )
∑
e∈E
u(e)2,
where m(V ) =∑
x∈V deg x.
———————————————-
Gradient maps
The correspondence ω 7→ (∇·Funi)(ω) is a map from
H1(X,R) into(H1(X,R)
)∗= H1(X,R).
Put
DE+(p) = Image ∇·Funi.
DE+(p) depends only on E+(p) (namely, if E+(p1) =
E+(p2), then DE+(p1) = DE+(p2)). Indeed
DE+ = ∑
e∈E
Q(e)e ∈ H1(X,R);
Q(e) ≥ 0,∑
e∈E
Q(e) = 1, supp Q = E+
DE+(p) is the interior of a convex polyhedron in
H1(X,R) or in a hypersurface of H1(X,R)
Theorem In the case E+(p) ∩ E+(p) 6= ∅, the map
ω 7→ (∇·Funi)(ω) is a diffeomorphism onto DE+(p).
Note ∇Funi(0) = γp.
110
The case of two-way traffic RW
Define the norm ‖ · ‖1 on C1(X,R) by∥∥∥
∑
e∈Eo
aee∥∥∥
1=
∑
e∈Eo
|ae|,
where Eo is an orientation. Note that this definition
does not depend on the choice of Eo.
Theorem DE = α ∈ H1(X,R); ‖α‖1 < 1
Theorem x ∈ H1(X,R) is an extreme point of DE
if and only if x = c/‖c‖1 for a simple closed path c
in X. Here a closed path is said to be simple if it
constitutes a circuit subgraph.
The case of one-way traffic RW
Theorem If E+ is one-way traffic, then DE+ is a
facet (a face of the maximal dimension) of DE.
The case of mixed traffic RW
Theorem If E+ ∩ E+ 6= ∅, then DE+ is the inter-
section of DE and a convex cone with the center 0.
In particular, 0 ∈ DE+.
111

Example
Consider the 2-bouquet graph X. Then
H1(X,R) = Re1 + Re2 = R2
and
‖x1e1 + x2e2‖1 = |x1| + |x2|so that DE is the square.
112

RW on a crystal lattice
Crystal lattices
A graph X = (V, E) is said to be a d-dimensional
crystal lattice if Aut(X) has a free abelian subgroup
Γ of rank d such that
(1) Γ acts freely both on V and the set of non-
oriented edges, and
(2) the quotient graph X0 = Γ\X is finite.
The group Γ is said to be a lattice (group) of X,
and X0 = (V0, E0) is said to be the fundamental finite
graph, where V0 = Γ\V , E0 = Γ\E.
This definition coincides with the previous one (XΓ→
X0 is an abelian covering graph).
=⇒ surjective homomorphism µ : H1(X0,Z) −→ Γ
=⇒ sujective linear map µR : H1(X0,R) −→ Γ ⊗ R=⇒ injective linear map
tµR : Hom(Γ,R) −→ H1(X0,R),
where Hom(Γ,R) denotes the linear space of homo-
morphisms of Γ into R, which is identified with (Γ ⊗R)∗.
113

Periodic realizations
Let X = (V, E) be a d-dimensional crystal lattice. A
map Φ : V −→ Rd is said to be a periodic realization
of X if there exist a lattice group Γ and an injective
homomorphism ρ : Γ −→ Rd such that
(1) Φ(gx) = Φ(x) + ρ(g) for x ∈ V and g ∈ Γ.
(2) ρ(Γ) is a lattice in Rd. Here a lattice means a
discrete subgroup of Rd of maximal rank.
—————————————————
“Normalized” expression of periodic
realizations
The inclusion ρ : Γ −→ Rd extends to a linear iso-
morphism of Γ ⊗ R onto Rd. Identify Rd with Γ ⊗ R.
Then Φ is a map of X into Γ ⊗ R satisfying
Φ(gx) = Φ(x) + g (∗),
where g ∈ Γ ⊂ Γ ⊗ R.
From now on, a periodic realization mean a map
Φ : V −→ Γ ⊗ R satisfying (∗).
114

Put v(e) = Φ(te) − Φ(oe) (e ∈ E). Then v(e) =
−v(e) and v(ge) = v(e), so that v is regarded as an
element of C1(X0, Γ⊗R). The 1-cochain v is a ‘‘build-
ing block” of Φ.
———————————————
RW with a periodic transition probability
A transition probability p on a crystal lattice X is
said to be periodic if there exists a lattice group Γ
such that p(ge) = p(e) (g ∈ Γ, e ∈ E).
A periodic transition probability yields a transition
probability p0 on X0. Conversely, a transition proba-
bility on X0 induces a periodic transition probability
p on X.
Similarly, we have the following correspondence
G-invariant subsets E+ ⊂ E ⇐⇒ subsets E+0 ⊂ E0
E+ ∪ E+ = E ⇐⇒ E+0 ∪ E+
0 = E0
E+(p) corresponds to E+0 (p0).
115

Irreducibility
E+ is irreducible =⇒ E+0 is irreducible.
Warning: Converse is, in general, not true.
If X is the maximal abelian covering of X0, then E+
is irreducible if and only if E+ = E (two-way traffic).
———————————————
Probability spaces
Let π : V −→ V0 be the covering map. When π(x) =
x0, (Ωx, Px) is identified with (Ωx0, Px0).
Thus a stochastic process with the probability space
(Ωx, Px) is regarded as a stochastic process with the
probability space (Ωx0, Px0).
116

Law of large numbers
From now on, p0 is supposed to be irreducible.
Given a periodic realization Φ : V −→ Γ⊗R, we have
the stochastic process ξn∞n=0 with values in Γ ⊗ R
defined by
ξn(c) = Φ(c(n)
) (c(n) = o(en+1), c = (e1, e2, · · · ))
Theorem limn→∞
1
nξn(c) = µR(γp0) in probability one.
Proof We may assume Φ(x) = 0. Then
ξn(c) = v(e1) + · · · + v(en)
Applying the general law of large numbers, we have
limn→∞
1
nξn(c) =
∑
e∈E
p0(e)m0(e)v(e) = 〈v, γp0〉
What remains to show is that, for any α ∈ H1(X0,Z),
〈v, α〉 = µ(α)
Represent α by a closed path c0 = (e1, · · · , en). Then
〈v, α〉 = v(e1) + · · · + v(en) = Φ(t(c)
) − Φ(o(c)
),
where c is a lift of c0. Since t(c) = µ(α)o(c), the RHS
is µ(α).
Exercise Let x ∈ Hom(Γ,R), and define ω ∈ C1(X0,R) by ω(e) =〈v(e), x〉. Show that tµR(x) = [ω] (Note (Γ ⊗ R)∗ = Hom(Γ,R)).
117

Martingale realizations
There are many ways to realize periodically a given
crystal lattice in space. Which is the most natural one
when we take account of RW ?
Definition A periodic realization Φ is said to be a
martingale realization (or harmonic realization) if
v ∈ C1(X0, Γ ⊗ R) is a harmonic 1-from.
The following conditions are equivalent:
(1) Φ is a martingale realization
(2) ∆Φ = µR(γp0)
(3) ξn − nµR(γp0)∞n=0 is martingale
A martingale realization is unique up to additive
constant vectors.
———————————————
Large deviation theory
Let ηn∞n=0 be a general stochastic process with val-
ues in a finite dimensional vector space S.
Assumption (1) For all x ∈ S∗, the limit
F (x) = limn→∞
1
nlog E
(e〈ηn,x〉)
exists (E denotes the expectation). F is said to be
the free energy (F is a convex function).
(2) F is smooth on S∗.
118

Define the function H(ξ) on S by
H(ξ) = supx∈S∗
(〈ξ, x〉 − F (x))
(Legendre-Fenchel transform). This is a convex func-
tion possibly taking ∞, and called the entropy.
For a subset A ⊂ S, put H(A) := infH(ξ) | ξ ∈ A.
Large deviation principle
−H(intA) ≤ lim infn→∞
1
nlog P
(1
nηn ∈ intA
)
≤ lim supn→∞
1
nlog P
(1
nηn ∈ A
)≤ −H(A),
—————————————————
The free energy for ξn∞n=0
Let x ∈ Hom(Γ,R). Then
E(e〈ξn,x〉) =∑
c;|c|=no(c)=x
p(c)e〈Φ(tc),x〉
=∑
c;|c|=no(c)=x
p0(c)eω(c) = Lω
n1
where ω(e) = 〈v(e), x〉, and ω(c) = ω(e1)+· · ·+ω(en).
Therefore
limn→∞
1
nlog E(e〈ξn,x〉) = Funi(ω),
and F (x) = Funi(tµR(x)), where Funi is the universal
free energy.
119

Let ∇F : Hom(Γ,R) −→ Γ⊗R be the gradient map.
Then
(∇F )(0) = µR(γp0),
Image ∇F = µR(DE+0 (p0)
)
Image ∇F is the interior of a convex polyhedron in
Γ ⊗ R or in an affine hyperplane of Γ ⊗ R.
The entropy H assumes finite values on µR(DE+0 (p0)
).
When ξ = (∇F )(x),
H(ξ) = 〈ξ, x〉 − F (x).
H(µR(γp0)) = 0
RW on X with the transition probability p is irre-
ducible if and only if 0 ∈ µR(DE+0 (p0)
).
—————————————————
Large deviation asymptotic
Let H be the entropy for ξn.
Theorem Suppose that RW on X is irreducible.
Let ξ ∈ µR(DE+0 (p0)
), and let yn∞n=1 be a sequence
in V such that Φ(yn) − nξ is bounded. Then
limn→∞
1
nlog p(n, x, yn) = −H(ξ)
120

Central limit theorem
Theorem Suppose that RW on X is irreducible. As
n ↑ ∞,
p(n, x, y)m(y)−1 ∼ ν
(4πn)d/2vol(J(Γ)
)
× exp(
− 1
4n‖Φ(y) − Φ(x) − nγp)‖2
)
as far as ‖Φ(x) − Φ(y) − nγp)‖ ≤ A√
n.
Φ : martingale realization,
ν : the period of E+(p), the greatest common divisor
of length of closed admissible paths.
γp = µR(γp0),
‖ · ‖ : the dual norm on Γ ⊗ R of the norm on
Hom(Γ,R) defined by
‖x‖2 =1
2(Hess0Funi)
(µR(x), µR(x)
)
J(Γ) = Hom(Γ,R)/Hom(Γ,Z) with the flat metric
induced from ‖x‖.
References
[1] M. Kotani and T. Sunada, Large deviation and the tangent cone atinfinity of a crystal lattice, to appear in Math. Z., (2006).
[2] M. Kotani and T. Sunada, Albanese maps and an off diagonal longtime asymptotic for the heat kernel, (with M.Kotani), Comm. Math.Phys. 209(2000), 633-670.
121

Appendix
RW on the triangular lattice
One-way traffic RW on the triangular lattice
122

Scaling limit of accessible parts
Fix x ∈ V , and suppose Φ(x) = 0. Denote
Cn = y ∈ V ; p(n, x, y) > 0,
Dp = µR(DE+(p0)).
If Dp has non-empty interior, then
limn→∞
1
nΦ(Cn) = Dp
123

















