31
Calibration of Stochastic Convenience Yield Models For Crude Oil Using the Kalman Filter. Delft – 22-02-08 www.ing.com Adriaan Krul
| Date post: | 26-Dec-2015 |
| Category: |
Documents |
| Upload: | kathleen-cunningham |
| View: | 216 times |
| Download: | 2 times |

Calibration of Stochastic Convenience Yield Models For Crude Oil Using the Kalman Filter.
Delft – 22-02-08www.ing.com
Adriaan Krul

ING 2
Contents
Introduction
Convenience yield follows Ornstein-Uhlenbeck process
Analytical results
Convenience yield follows Cox-Ingersoll-Ross process
Analytical results
Numerical results
Conclusion
Further research

ING 3
Introduction
A future contract is an agreement between two parties to buy or sell an asset at a certain time in the future for a certain price.
Convenience yield is the premium associated with holding an underlying product or physical good, rather than the contract of derivative product.
Commodities – Gold, Silver, Copper, Oil
We use futures of light crude oil ranging for a period from 01-02-2002 until 25-01-2008 on each friday to prevent weekend effects.

ING 4
Stochastic convenience yield; first approach
We assume that the spot price of the commodity follows an geometrical brownian motion and that the
convenience yield follows an Ornstein-Uhlenbeck process. I.e., we have the joint-stochastic process

ING 5
In combination with the transformation x = ln S we have
ING 6
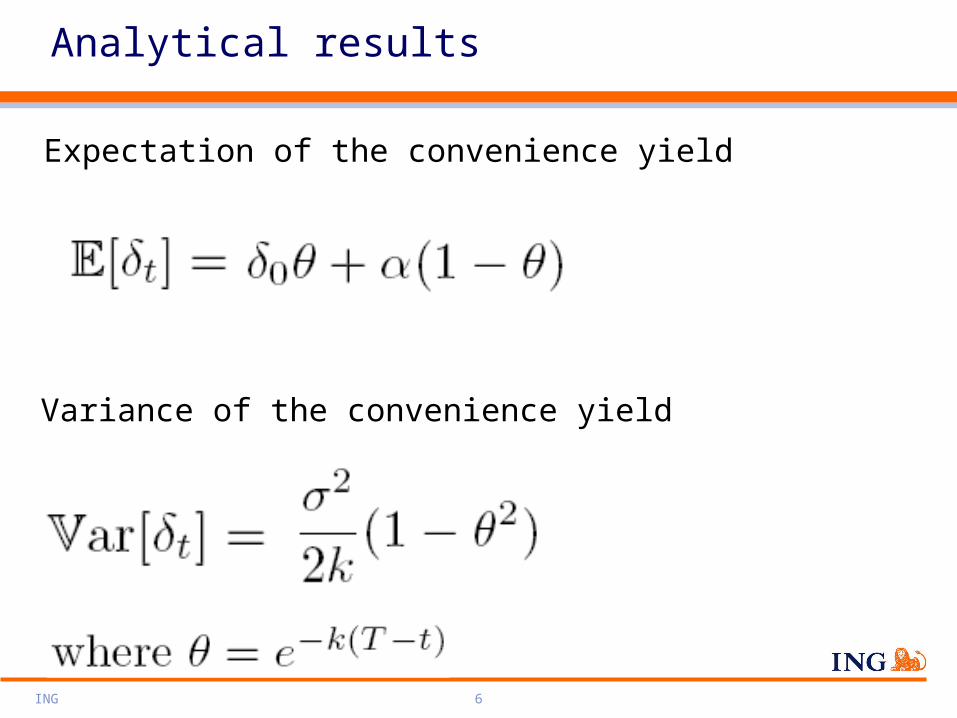
Analytical results
Expectation of the convenience yield
Variance of the convenience yield

ING 7
Analytical results
PDE of the future prices
Closed form solution of the future prices

ING 8
Stochastic convenience yield; second approach
We assume that the spot price of the commodity follows an geometrical brownian motion and that the convenience yield follows a Cox-Ingersoll-Ross process. I.e., we have the joint-stochastic process

ING 9
Together with the transformation x = ln S, we have

ING 10
Analytical results
Expectation of the convenience yield
Variance of the convenience yield

ING 11
Analytical results
PDE of the future prices
Closed form solution of the future prices

ING 12
Kalman filter
Since the spot price and convenience yield of commodities are non-observable state-variables, the Kalman Filter is the appropriate method to model these variables.
The main idea of the Kalman Filter is to use observable variables to reconstitute the value of the non-observable variables. Since the future prices are widely observed and traded in the market, we consider these our observable variables.
The aim of this thesis is to implement the Kalman Filter and test both the approaches and compare them with the market data.

ING 13
Kalman Filter for approach one.
Recall that the closed form solution of the future price
was given by
From this the measurement equation immediately follows

ING 14
From
we can write

ING 15
Kalman filter for approach one
The difference between the closed form solution and the
measurement equation is the error term epsilon.
This error term is included to account for possible
errors. To get a feeling of the size of the error, suppose
that the OU process generates the yields perfectly and that
the state variables can be observed
form the market directly. The error term could then be
thought of as market data, bid-ask spreads etc.

ING 16
Kalman filter for approach one
Recall the join-stochastic process
the transition equation follows immediately

ING 17
For simplicity we write

ING 18
Kalman filter for approach two
From
it follows

ING 19
Kalman filter for approach two
Recall the join-stochastic process
the transition equation follows immediately

ING 20
For simplicity we write

ING 21
How does the Kalman Filter work?
We use weekly observations of the light crude oil marketfrom 01-02-2002 until 25-01-2008. At each observation weconsider 7 monthly contracts. The systems matrices consists of the unknown parameter set. Choosing an initial set we can calculate the transition and measurement equation and update them via the Kalman Filter. Then the log-likelihood function is maximized and the innovations (error between the market price and the numerical price) is minimized.

ING 22
How to choose the initial state.
For the initial parameter set we randomly choose the value of the parameters within a respectable bound.For the initial spot price at time zero we retained it as the future price with the first maturity and the convenience yield is initially calculated via

ING 23
Numerical results for approach one

ING 24
Log future prices versus state variable x

ING 25
Implied convenience yield versus state variable delta

ING 26
Innovation for F1

ING 27
Kalman forecasting applied on the log future prices

ING 28
Kalman Forecasting applied on the state variables

ING 29
Conclusion
We implemented the Kalman Filter for the OU process. Both the convenience yield as well as the state variable x (log of the spot price) seems to follow the implied yield and the market price (resp.) quite good. Also, different initial values for the parameter set will eventually converge to the optimized set with the same value of the log-likelihood. This is a good result and tests the robustness of the method.
The main difference between the systems matrices of both processes is the transition error covariance-variance matrix Vt. In the CIR model, this matrix forbids negativity of the CY. We simply replaced any negative element of the CY by zero, but since it is negative for a large number of observations, this will probably give rise to large standard errors in the optimized parameter set.

ING 30
Conclusion
The Kalman Forecasting seems to work only if there is no sudden drop in the data. To improve the Kalman Forecasting we could update it every 10 observations.

ING 31
Further research
• Implement the Kalman Filter for the CIR model
• Inserting a jump constant in the convenience yield
• Compare both stochastic models
• Pricing of options on commodities, using the optimized parameter set
















