18
Finding Solutions for GPS Indoors By Fady Rizk
| Date post: | 03-Aug-2015 |
| Category: |
Technology |
| Upload: | fadyrizk |
| View: | 132 times |
| Download: | 0 times |
Finding Solutions for GPS Indoors
By Fady Rizk

What’s GPS?Global Positioning SystemThe idea has been there since the 70’s
Became available for commercial use in 1993

GPS Receiver

How?Receiver receives signals from satellites
Using the trilateration methodThen computes the dataOutputs the results on a map
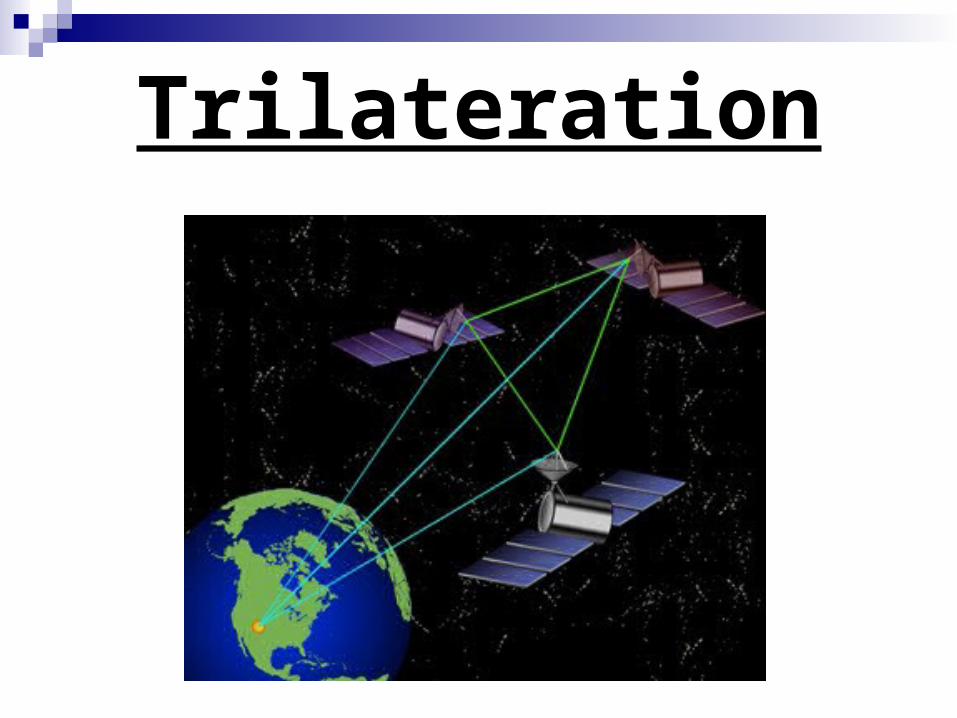
Trilateration

The Problem
GPS receiver work outdoors
…but not indoors
Why?
1- Suffers a low signal-to-noise ratio
2- Fails to identify a correlation peak
3- Results in failing to identify a location

Problem Conclusion
Receiver finds it difficult to detect any signal from the
satellites due to reflection, diffraction, fading, refraction, signal
attenuation or total obstruction

The Need:Finding people in buildingsFinding workers in cavesFinding locations in huge buildings
Finding lost soldiers

What to do?
High Sensitivity GPS receiverThe Beacon (ultrasonic sensor)The Unscented Kalman Filter
(UKF)

High Sensitivity GPS (chip/receiver) Makes the receivers process signals
with the strength of -180 dBW or below
Captures 70% of the available signals
Increases the carrier to noise ratio
The Active Beacon (ultrasonic sensor) Easy signal-processing Estimates a stable and fast
localization for a moving object Exhibits robust performances in noisy
environments Operates with a low sampling-rate

The Unscented Kalman Filter (UKF)
Just a better filter and algorithm to use
Overcomes severe disturbance for sensor measurement
Does not fix the delay

Research Idea
Combining the researchers’ solutions and experiments into one
AndFollow researcher's suggestions to fix
problems

Experiment Environment A building’s last floor Preferably a building that has concrete
structure Three measurement positions:1- A terrace surrounded by four walls, with no
roof2- Room with a roof, with the dimensions of at
least 10.2 x 11.2 x 4.2 meters 3- A small corridor surrounded by multiple
walls

Expected Results
The receiver to not suffer of a low signal-to-noise ratio (HS GPS)
Receiver process signals with the strength of -180 dBW or below (HS GPS)
70% of the signals and fix the pseudo range problem
a stable and fast localization
How to value the results?The closer it gets to the GPS receiver’s behavior outdoors, the more this experiment is successful
If the outcome of this experiment shows better and more accurate
results than what researchers did, the experiment is also considered as a
success

Thanks for your attention

















