23
Maze Solver Robot Using Wall-Following Algorithm By: Ali Ulku & Vardah Muhammad Supervized By: Dr. Mehmet Keskinoz 24.05.2015
| Date post: | 18-Aug-2015 |
| Category: |
Documents |
| Upload: | ali-uelkue |
| View: | 7 times |
| Download: | 4 times |
Maze Solver Robot Using Wall-Following Algorithm
By: Ali Ulku & Vardah MuhammadSupervized By: Dr. Mehmet Keskinoz
24.05.2015

Outline

Outline
• Introduction
Lego Mindstorm Construction Pack
Completed View
Wall-Following Algorithm
Different Types of Circuits
• Algorithm
Pseudo Code
Initialization Block
1st If Block
2nd If Block
Move Forward Block
Turn Right/Left Block
Medium Motor Turn Right/Left Block
Logic
• Result
Robot in the Maze
Escape Route on Matlab

Introduction

5
Introduction
Lego Mindstorm Construction Pack
Main Hardware:
• EV3 Brick (300 MHz ARM9 Controller)• 2 Large Motors• 1 Medium Motor• Infrared Sensor• Subassemblies
Comments

6
Introduction
Top View
Completed View
Bottom View

7
Introduction
Wall-Following Algorithm
Comments
Wall-Following Algorithm
•Follows the Right Hand Wall Rule•Simple•Fast•Unique Solution•Works for Open Circuits•No need for Memory Storage•Parameters can be easily controlled
8
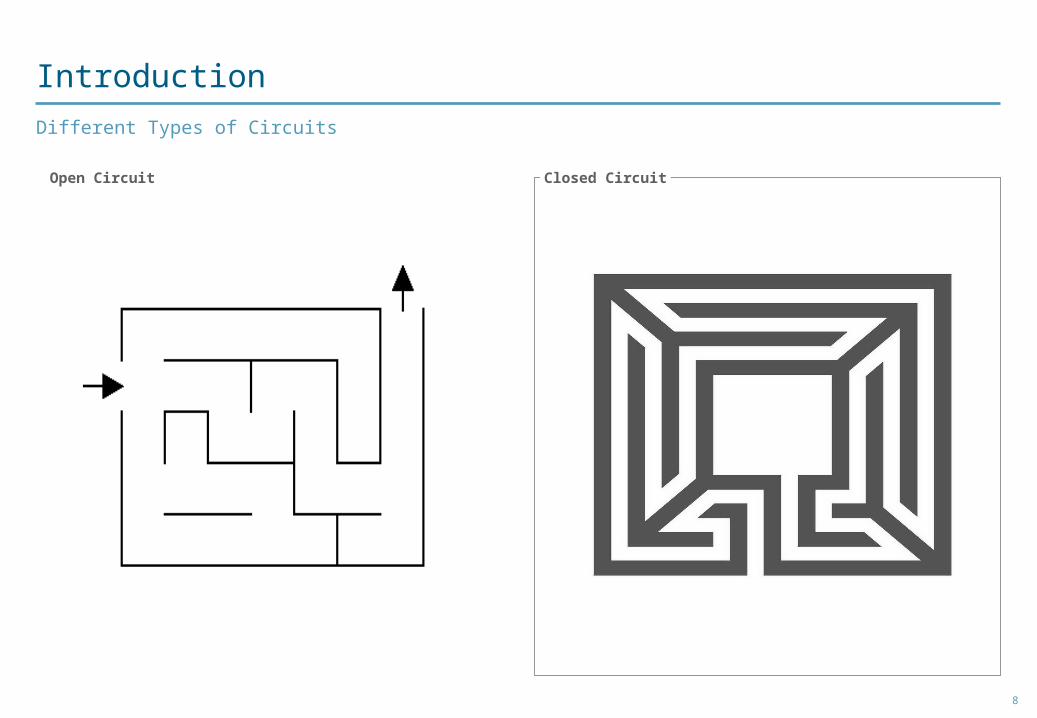
Introduction
Open Circuit
Different Types of Circuits
Closed Circuit

Algorithm
10
Algorithm
Pseudo Code
Pseudo Code Blocks
Initialization Block
Turn Right/LeftBlock
Medium MotorTurn Right/Left
Block
2 If Blocks
Move ForwardBlock

11
Algorithm
Initialization Block
• Initializes x, y position and direction• Used to generate trajectory of robot and maze map
Comments

12
Algorithm
1st If Block
• Reads from Infrared Sensor• Checks if there is a wall on the right
Reading of less than 15 indicates that wall is present
Comments

13
Algorithm
2nd If Block
• Decides on the direction to move
Comments
14
Algorithm
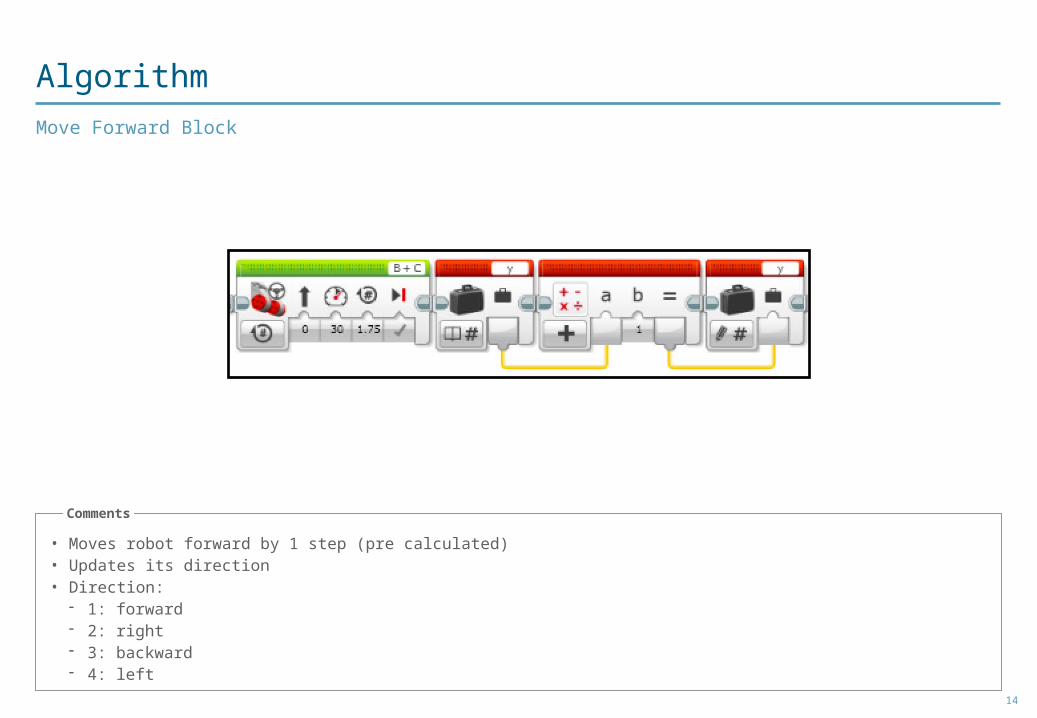
Move Forward Block
• Moves robot forward by 1 step (pre calculated)• Updates its direction• Direction:
1: forward 2: right 3: backward 4: left
Comments

15
Algorithm
Turn Left Block
• Turns robot to the left• Increments direction by 1
Comments
16
Algorithm
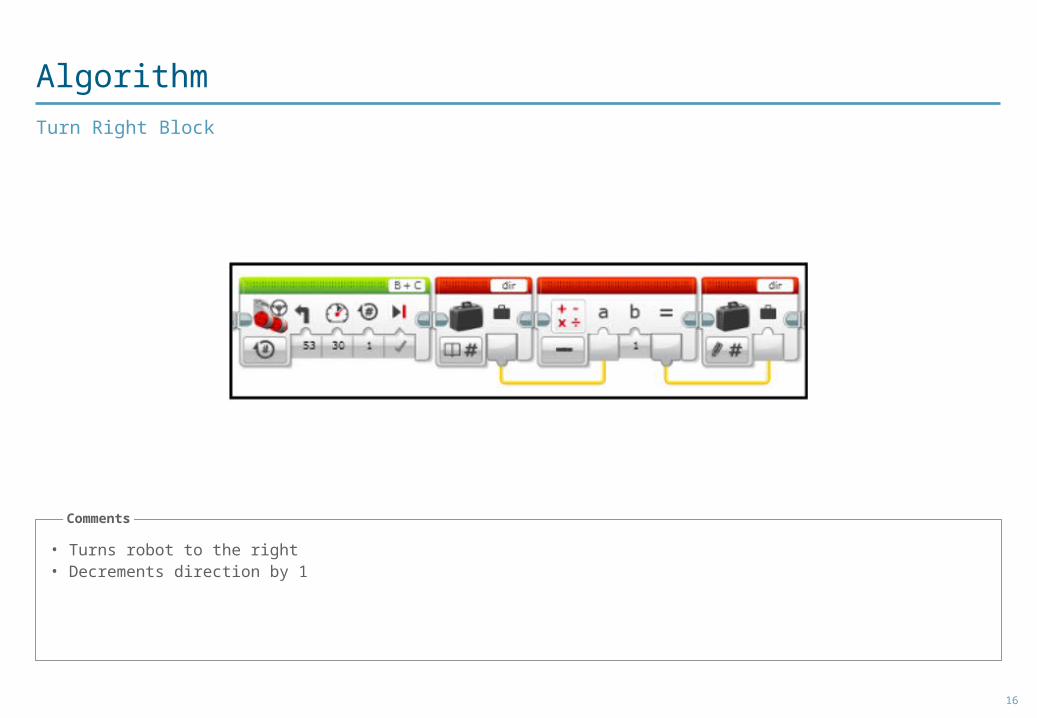
Turn Right Block
• Turns robot to the right• Decrements direction by 1
Comments

17
Algorithm
Medium Motor Turn Right Block
• Medium motor holds the infrared sensor• Turns medium motor to the right
Add 90 to reading to get rid of drift• Uses proportional gain of 0.5 to reduce accumulated error
Comments

18
Algorithm
Medium Motor Turn Left Block
• Turns medium motor to the left Subtract 90 from reading to get rid of drift
• Uses proportional gain of 0.5 to reduce accumulated error
Comments

19
Algorithm
Check Right
No wall (proximity>15)
Wall (proximity <15)
Turn Right & Move Forward
Logic
Check Front
Move ForwardNo wall (proximity>15)
Wall (proximity <15)
Turn Left and Repeat from the start

Result

21
Result
Video
The Robot in the Maze
Constructed Maze

22
Result
Robot’s Escape Route on Matlab
• Red and straight lines show the borders of the maze Achieved by combining direction information
• Blue and dashed lines show the route that our robot traveled only once
• Blue and straight lines show the route that our robot traveled back and forth Achieved by combining position and direction
information
Comments

Thank You!

















